Some New Solutions of Non Linear Evolution Equations With Mutable Coefficients
 Jasvinder Singh Virdi
Jasvinder Singh Virdi- Department of Physics, Veer Surendra Sai University of Technology, Burla, India
We construct the traveling wave solutions of some NonLinear Evolution Equations (NLEEs) with mutable coefficients arising in different branches of physics and mathematics. we apply a novel
1 Introduction
NonLinear Evolution Equations (NLEEs) plays a significant role in the analysis of mathematical modeling and soliton theory. These NLEEs, which are primarily studied in mathematics and physics play an important role and character in various branches of science and technology, such as propagation of shallow water waves, population statistics physics, fluid dynamics, condensed matter physics, computational physics, and geophysics. NLEEs also appear and are very important in many fields such as wave mechanics, dissipation mechanics, dispersion in optics, reaction and convection equations. Over the past few decades, many compelling methodologies for extracting exact solutions of NLEEs have been formulated. However, it is more difficult to solve the NLEEs but, various methods have been tried for solving NLEEs, such as the Hirota’s bilinear operations [1] truncated Painleve expansion [2], inverse scattering transform [3], extended tanh-function method [4], F-expansion method [5], tanh-coth method [6], Jacobi-elliptic function expansion [7], homogenous balance method [8], sub ODE method [9], Rank analysis method [10], Extended and modified direct algebraic method [11], extended mapping method [12, 13] and Seadawy techniques to find solutions for some nonlinear partial differential equations [14] and many other ansatzes comprising exponential and hyperbolic functions are accurately used for the analytic analysis of NLEEs. Recently a few other well-known methods are used to extract explicit solutions of soliton equations, as example the adomionos decomposition method [15], Darboux transformation (DT) [16], Hirota technique [17] etc. In early 1990s, Wang et al. [18] familiarize a new formalism called extended
2 The Method and its Applications
In order to solve NLEEs, defined with two independent variables x and t, in this section we highlights the important points of the extended
where u = u (x, t) and P is polynomial in u = u (x, t)
Point 1: Let us introduce the wave variable
so that
This leads to NonLinear ordinary differential equation (NLODE) as
where uξ denotes differentiation of u wrt ξ.
Integrating the ODE (4) many times with setting the constant of integration to be zero.
Point 2: The solution of Eq. 4 can be expressed by a polynomial in extended
where G = G(ξ) entertain following ODE of the form
where δm, δm−1, …,δ0, γ and ρ are constants to be found out later and δm ≠ 0.
Point 3: Replacing Eq. 5 into Eq. 4 and using Eq. 6, and assembling all terms with the equal order of
Point 4: Since the general solutions of Eq. 6 have been well known for us, then substituting δm, δm−1, …,δ0 and c and the general solutions of Eq. 6 into Eq. 5 we obtain more solitary wave solutions of NLEEs Eq. 1.
With this detailed mathematical explanation of the extended
3 Sharma-Tasso-Olver Equation
Nonlinear Sharma-Tasso-Olver (STO) the mutable coefficients have discussed in many branches of mathematical physics, science and engineering. STO equation reads as [21].
This equation contains both linear dispersive term uxxx and the double nonlinear terms uux and ut. Here the parameters f(t) ≠ 0, g(t) ≠ 0 and are both temporal variable. Using a transformation STO (7) with new variable reads
provided f(t) and g(t) in Eq. 7 should hold the condition f(t) = 3g(t). Integration Eq. 7, shorten to
Homogeneous balance between linear dispersive term uξξ and the double nonlinear terms u3 solution are as suggested by formalism, we find n = 1
where δ0, δ1, δ−1 are constants. Replacing Eq. 10 with Eq. 6 into Eq. 7, accumulating the coefficients of
Case (1)
Case (2)
so as per the first conditions the Eq. 10 will give
For the second case Eq. 10 will give
with the aid of Eq. 6, solutions of Eqs 13,14 are the solitary wave solutions as trigonometric, rational and hyperbolic functions.
Solution of first kind (1): when
Solution of second kind (2): when
Solution of third kind (3): when
where A1 and A2 are integration constants. All different possible traveling wave solutions are presented by their 3D plots and their corresponding contour plots (right side figures) (Figure 1). For simplicity of the plot, we have taken all required vales of δ0, δ1, δ−1, ζ(t), A1, and A2 and plotted for only the first solution u1(χ) only. Important results are discussed in concluding remarks.
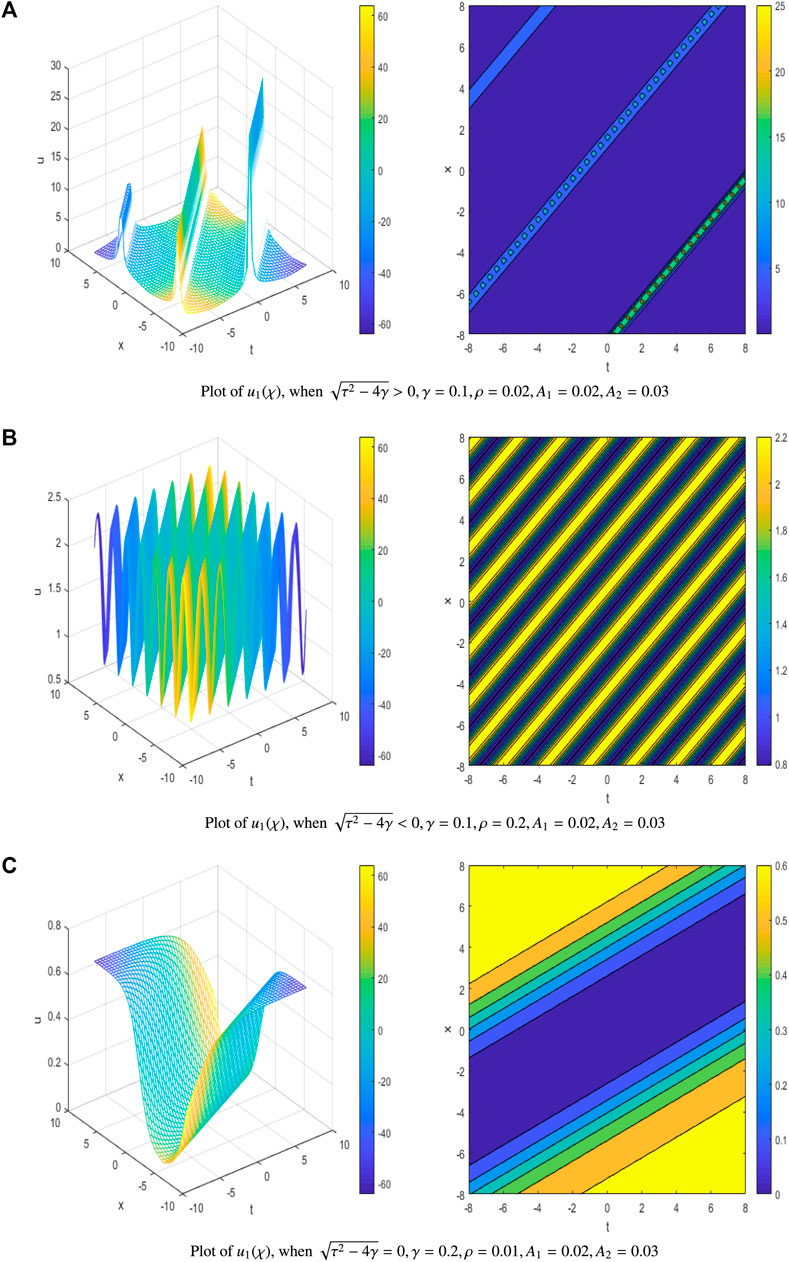
FIGURE 1. Traveling wave solution corresponding to the Sharma-Tasso-Olver (STO) equation. (A) Plot of u1(χ), when
4 Generalized Zakharov Kuznetsov Equation
Generalized Zakharov Kuznetsov (ZK) equation with mutable coefficients describes wave features in plasma physics [23]. Particularly the ZK equation was a handful in for describing weakly nonlinear ion-acoustic waves in strongly magnetized lossless plasma in two dimensions. The ZK equation with dual power law nonlinearity is the main motivation of this work. The ZK equation reads as
where δ(t), ζ(t) and θ(t) are arbitrary function of t. For wave solutions for Eq. 20, use transformation
where k, l are constants, τ(t) is an integrable function of t to be determined later. Substituting Eq. 21 into Eq. 20, we have
where the prime denotes the differential with respect to x. Formalism suggests to introduce the anstaz
where δi are constants. Making the homogeneous balance between u′′′(ξ) and u2(ξ), u′(ξ) in Eq. 22, yields n = 1, so solution of Eq. 20 be as suggested by formalism
Replacing Eq. 24 with Eq. 6 into Eq. 22, accumulating the coefficients of
Case (1)
Case (2)
by using above two conditions solutions can be written as
similarly we have
with Eq. 26 and Eq. 6, we have exponential and hyperbolic and rational functions types of solitary wave solutions for ZK equation with mutable coefficients Eq. 20 as:
Solution of first kind (1): when
Second kind (2): when
Third kind (3): when
where A1 and A2 are integration constants. As results, many exact solitary wave solutions of the form hyperbolic, trigonometric and rational functions are obtained (Figure 2). We have taken all required vales of δ0, δ1, δ−1, ρ, ζ(t), θ(t) k, l, A1, A2 and τ(t) and plotted for only the first solution u1(χ) only.

FIGURE 2. Traveling wave solution corresponding to the Zakharov Kuznetsov equation (ZK) equation. (A) Plot of u1(χ), when
5 Conclusion
Finally, it is worthwhile to mention these hyperbolic, trigonometric and rational function solutions are difficult to obtain by the methods mentioned in the introduction. The general solitary wave solutions can give soliton or periodic solutions under different parametric restrictions. These results mean that there are rich solitary wave patterns for the STO and ZK equation. To the best of our knowledge concern, this paper reports the aforementioned new solutions by this novel method. To our knowledge our solutions Eq. 15 and Eq. 17 of Eqs 19,27,29 of Eq. 32 are all new and not reported in literature. It is interesting to note that from the general results, one can easily recover solutions that are obtained from other methods. If we take the concrete parameters in a real model, we can give the corresponding representation of the solution. Comparing this work with the work in [6] where the tanh method were used, we find that the proposed method in this work presents more kink and solitons solutions compared to the work in [6]. Therefore, it is rather convenient for practice. We also presented three-dimensional plots and their corresponding contour plots of some of the solutions. This is direct and the concise method can further be used to explore more applications.
Data Availability Statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author Contributions
The author confirms being the sole contributor of this work and has approved it for publication.
Conflict of Interest
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
2. Lou, SY, Wu, B, and Zhang, SL. Painlev Analysis and Special Solutions of Generalized Broer-Kaup Equations. Phys Lett A (2002) 300(1):4048. doi:10.1016/S0375-9601(02)00688-6
3. Ablowitz, MJ, and Clarkson, PA. Soliton, Nonlinear Evolution Equations and Inverse Scattering. New York: Cambridge University Press (1991).
4. Fan, E. Extended Tanh-Function Method and its Applications to Nonlinear Equations. Phys Lett A (2000) 277:212–8. doi:10.1016/s0375-9601(00)00725-8
5. Yan, CT. A Simple Transformation for Nonlinear Waves. Phys Lett A (1995) 224:77–84. doi:10.1016/S0375-9601(96)00770-0
6. Wazwaz, AM. The Tanh-Coth Method for Solitons and Kink Solutions for Nonlinear Parabolic Equations. Appl Math Comput (1997) 188:1467–75. doi:10.1016/j.amc.2006.11.013
7. Fu, ZT, Liu, SK, Liu, SD, and Zhao, Q. Jacobi Elliptic Function Expansion Method and Periodic Wave Solutions of Nonlinear Wave Equations. Phys Lett A (2001) 289:69–74. doi:10.1016/S0375-9601(01)00580-1
8. Ablowitz, MJ, and Clarkson, PA. Solitons, Non-linear Equations and Inverse Scattering Transform. Cambridge: Cambridge University Press (1991).
9. Arshad, M, Seadawy, AR, and Lu, D. Modulation Stability and Optical Soliton Solutions of Nonlinear Schrödinger Equation with Higher Order Dispersion and Nonlinear Terms and its Applications. Superlattices and Microstructures (2017) 112:422–34. doi:10.1016/j.spmi.2017.09.054
10. Yel, G, Baskonus, HM, and Gao, W. New Dark-Bright Soliton in the Shallow Water Wave Model. AIMS Math (2020) 5(4):40274044. doi:10.3934/math.2020259
11. Seadawy, AR, and El-Rashidy, K. Dispersive Solitary Wave Solutions of Kadomtsev-Petviashvili and Modified Kadomtsev-Petviashvili Dynamical Equations in Unmagnetized Dust Plasma. Results Phys (2018) 8:1216–22. doi:10.1016/j.rinp.2018.01.053
12. Seadawy, AR, Ali, A, and Albarakati, WA. Analytical Wave Solutions of the (2 + 1)-dimensional First Integro-Differential Kadomtsev-Petviashivili Hierarchy Equation by Using Modified Mathematical Methods. Results Phys (2019) 15:102775. doi:10.1016/j.rinp.2019.102775
13. Helal, MA, Seadawy, AR, and Zekry, MH. Stability Analysis of Solitary Wave Solutions for the Fourth-Order Nonlinear Boussinesq Water Wave Equation. Appl Math Comput (2014) 232:1094–103. doi:10.1016/j.amc.2014.01.066
14. Baskonus, HM. New Acoustic Wave Behaviors to the DaveyStewartson Equation with Power-Law Nonlinearity Arising in Fluid Dynamics. Nonlinear Dyn (2016) 86(1):177183. doi:10.1007/s11071-016-2880-4
15. Iqbal, M, Seadawy, AR, Khalil, OH, and Lu, D. Propagation of Long Internal Waves in Density Stratified Ocean for the (2+1)-dimensional Nonlinear Nizhnik-Novikov-Vesselov Dynamical Equation. Results Phys (2020) 16:102838. doi:10.1016/j.rinp.2019.102838
16. Tong, L, Wang, S, and Zhang, S. A Generalized (G′/G)- Expansion Method for the mKdv Equation with Variable Coefficients. Phys Lett A (2008) 372:2254. doi:10.1016/j.physleta.2007.11.026
17. Gulnur, Y, Carlo, C, Haci, MB, and Wei, G. DarkBright to the Hirota-Maccari System. J Comput Nonlinear Dynam (2021) 16(6):061005. doi:10.1115/1.4050677
18. Wang, M. Exact Solutions for a Compound Kdv-Burgers Equation. Phys Lett A (1996) 213:279–87. doi:10.1016/0375-9601(96)00103-x
19. Li, X, Wang, M, and Zhang, J. The (G′/G)-expansion Method and Traveling Wave Solutions of Nonlinear Evolution Equations in Mathematical Physics. Phys Lett A (2008) 372:417. doi:10.1016/j.physleta.2007.07.051
20. Wang, M. Solitary Wave Solutions for Variant Boussinesq Equations. Phys Lett A (1995) 199:169–72. doi:10.1016/0375-9601(95)00092-h
21. Sharma, AS. Connection between Wave Envelope and Explicit Solution of a Nonlinear Dispersive Equation. Rep IPP (1977) 158:1.
22. Olver, PJ. Evolution Equations Possessing Infinitely many Symmetries. J Math.Phys (1977) 18:12121215. doi:10.1063/1.523393
Keywords: nonlinear evolution equations, solitons, solitary wave solutions, explicit solution PACS no: 0230Ik, 0365Fd, 0320+i
Citation: Virdi JS (2021) Some New Solutions of Non Linear Evolution Equations With Mutable Coefficients. Front. Appl. Math. Stat. 7:631052. doi: 10.3389/fams.2021.631052
Received: 19 November 2020; Accepted: 26 July 2021;
Published: 06 October 2021.
Edited by:
Yang-Hui He, London Institute for Mathematical Sciences, United KingdomReviewed by:
Haci Mehmet Baskonus, Harran University, TurkeyAnouar Ben Mabrouk, University of Kairouan, Tunisia
Copyright © 2021 Virdi. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Jasvinder Singh Virdi, jpsvirdi@gmail.com