Automatized localization of induced geothermal seismicity using robust time-domain array processing
 Philip Hering
Philip Hering Michael Lindenfeld1
Michael Lindenfeld1  Georg Rümpker
Georg Rümpker- 1Institute of Geosciences, Goethe-University Frankfurt, Frankfurt, Germany
- 2Frankfurt Institute for Advanced Studies, Frankfurt, Germany
The surveillance of geothermal seismicity is typically conducted using seismic networks, deployed around the power plants and subject to noise conditions in often highly urbanized areas. In contrast, seismic arrays can be situated at greater distances and allow monitoring of different power plants from one central location, less affected by noise interference. However, the effectiveness of arrays to monitor geothermal reservoirs is not well investigated and the increased distance to the source coincides with a decreased accuracy of the earthquake localizations. It is therefore essential to establish robust data processing and to obtain precise estimates of the location uncertainties. Here, we use time-domain array data processing and solve for the full 3-D slowness vector using robust linear regression. The approach implements a Biweight M-estimator, which yields stable parameter estimates and is well suited for real-time applications. We compare its performance to conventional least squares regression and frequency wavenumber analysis. Additionally, we implement a statistical approach based on changepoint analysis to automatically identify P- and S-wave arrivals within the recorded waveforms. The method can be seen as a simplification of autoregressive prediction. The estimated onsets facilitate reliable calculations of epicentral distances. We assess the performance of our methodology by comparison to network localizations for 77 induced earthquakes from the Landau and Insheim deep-geothermal reservoirs, situated in Rhineland-Palatinate, Germany. Our results demonstrate that we can differentiate earthquakes originating from both reservoirs and successfully localize the majority of events within the magnitude range of ML -0.2 to ML 1.3. The discrepancy between the two localization methods is mostly less than 1 km, which falls within the statistical errors. However, a few localizations deviate significantly, which can be attributed to poor observations during the winter of 2021/2022.
1 Introduction
Geothermal energy plays an important role in the transition of the energy sector towards sustainable resources. Unfortunately, high-pressure injection of geothermal fluids is often associated with weak to moderate seismicity (e.g., Cornet et al., 1997; Cuenot et al., 2008 or Evans et al., 2012). To minimize the seismic hazard, it is crucial to continuously monitor the injection and production processes and localize associated induced seismicity. A reliable and transparent monitoring also helps to increase the public acceptance of existing and future geothermal projects.
Induced seismicity usually relates to man-made stress perturbations of the subsurface, frequently interfering with the local tectonic stress field, and resulting in earthquake activity (e.g., Grünthal, 2014). It can occur in the context of mining, hydrocarbon or shale gas extraction, wastewater disposal, and geothermal energy production (see, e.g., Suckale, 2010; Grünthal, 2014; Farahbod et al., 2015; Weingarten, et al., 2015). Mechanisms that drive induced seismicity in geothermal environments include pore-pressure and temperature increase, volume change due to fluid withdrawal or injection, and chemical alteration of fracture surfaces (Majer et al., 2007; Zang et al., 2014). Commercial geothermal energy production requires a high geothermal gradient and is therefore often located in active tectonic regions (Brune & Thatcher, 2002). The size and rate of seismicity is then defined by the injection volume (and rate), the orientation of the tectonic stress field relative to the pore pressure increase and the extent of the deviatoric stress field within the local fault system (Cornet & Julien, 1989; Cornet & Jianmin, 1995; Brune & Thatcher, 2002). Grünthal (2014) analyzes the annual frequency-magnitude distribution of induced geothermal seismicity in central Europe in the period from 2000 to 2011 and compares it to the natural earthquake activity in the region. The results show that induced geothermal events with local magnitudes above ML 2.0 are rare if compared to tectonic earthquakes. However, the intensity of micro-seismicity (ML < 2.0) is significant, with a b-value of 1.94 (±0.21).
To understand the physical processes during a geothermal stimulation and to establish a reliable seismic hazard assessment, the detection and localization of induced geothermal micro-seismicity has gained more and more relevance (Plenkers et al., 2013). Unfortunately, the preferred locations of geothermal reservoirs lie beneath sedimentary basins, which are often densely populated. This significantly aggravates the detection process due to seismic wave attenuation and an increased level of seismic background noise (Wilson et al., 2002; Plenkers et al., 2013).
Conventional short-/long-term triggers (STA/LTA) will likely fail under complex noise conditions and advanced detection methods are required (Withers et al., 1998). Plenkers et al. (2013) apply a template correlation trigger to detect micro-seismicity related to a stimulation test in the Landau deep-geothermal reservoir. A similar approach is introduced by Vasterling et al. (2017), who use the envelope of recorded seismograms to establish a real-time detector based on template correlation. Joswig (1990) and Sick et al. (2015) use (unsupervised) sonogram pattern recognition for event detection. More recent applications focus on deep-learning approaches, such as convolutional neural networks, to monitor induced (micro-) seismicity and to establish automatized seismic phase picking (e.g., Zhu & Beroza, 2019; Mousavi et al., 2020; Wang et al., 2020; Johnson et al., 2021; Li et al., 2022). Further methods to obtain automatized seismic phase arrivals include autoregressive (AR) prediction (e.g., Takanami & Kitagawa, 1988; Küperkoch et al., 2012), sometimes combined with the Akaike-Information-Criterion (AR-AIC; Akaike, 1973; Leonard & Kennett, 1999; Sleeman & van Eck, 1999), higher-order statistics (e.g., Küpperkoch, 2010) or relative travel-time determination via multi-channel cross correlation (e.g., VanDecar & Crosson, 1990).
In contrast to seismic networks, seismic arrays are located outside the source region and can be used to measure the back azimuth and horizontal apparent velocity of an incoming seismic signal, even without clear phase onsets (Rost & Thomas, 2002). Seismic arrays have been frequently used for earthquake detection on a global, regional, and local scale. This includes studies on the Earth’s (fine-scale) structure, detection of human-induced seismicity, volcano monitoring (cf. Rost & Thomas, 2002 or Schweitzer et al., 2012 and references therein), and ocean-bottom arrays (Krüger et al., 2020). Following its initial purpose of detecting nuclear explosions (e.g., Douglas et al., 1999), different studies utilize seismic arrays for seismic risk assessment. Gibbons et al. (2005), for example, use autoregressive prediction and narrowband f-k analysis for a case study to monitor mining blasts. Li and Zhan (2018) use a distributed acoustic sensing array and template matching to detect induced geothermal seismicity in the Brady field. Further examples include real-time infrasound monitoring at the Alaska Volcano Observatory (Coombs et al., 2018) and the real-time array data processing software RETREAT (Smith & Bean, 2020), developed with a focus on volcano monitoring and volcanic tremor.
Most standard array processing methods apply beamforming in the time- (beam power analysis; see King et al., 1975; 1976) or frequency-wavenumber domain (f-k analysis; see Capon, 1969). Both approaches perform calculations of the beam power over a predefined slowness grid in the horizontal (
Seismic arrays are less frequently used for distance estimation. For instance, Singh and Rümpker (2020) and Leva et al. (2020) use manually picked P- and S-wave onsets and a 2-D velocity model to estimate the epicentral distance of events at the Central Indian Ridge and volcanic events near Fogo and Brava, Cabo Verde. They further implement a multi-array analysis, which allows for epicentral localizations without assumptions about the velocity model (Leva et al., 2022).
Our study focuses on developing a computationally efficient and robust solver to determine the slowness vector of seismic phases, with application to induced geothermal seismicity in the Landau and Insheim deep-geothermal reservoirs. We use linear regression to fit observed delay times and, for the first time, implement robust regression estimators for seismic array processing. Szuberla & Olsen (2004) consider a hypothetically multidimensional array configuration, but practically the method was never applied outside the horizontal plane. We demonstrate that the inclusion of inter-station elevation differences into the regression model yields estimates for the full slowness vector. The regression approaches are subsequently compared to the widely used frequency-wavenumber analysis. We further introduce statistical changepoint analysis as a tool to obtain automatized P- and S-phase arrivals. The approach minimizes the deviation of individual data points from two empirical statistical parameters. This corresponds to a maximization of the likelihood function and can be seen as a simplification of the autoregressive Akaike-Information-Criterion. We evaluate our methodology by a comparison to 77 network localizations from the Landau and Insheim geothermal reservoirs.
2 Study area and array design
The Upper Rhine Graben (URG) is part of the European Cenozoic rift system and is one of Central Europe’s most active tectonic regions with a small to moderate seismic risk (Illies, 1972; Grünthal & Wahlström, 2012). The Landau and Insheim geothermal reservoirs are located near the western rim of the URG in southwestern Germany (cf. Figure 1A). The geological setting includes a crystalline basement, covered by up to 3 km of Paleozoic, Mesozoic and Tertiary sediments and unconsolidated Quaternary sequences (Bartz, 1974; Doebl & Olbrecht, 1974). The region has a geothermal gradient of 150
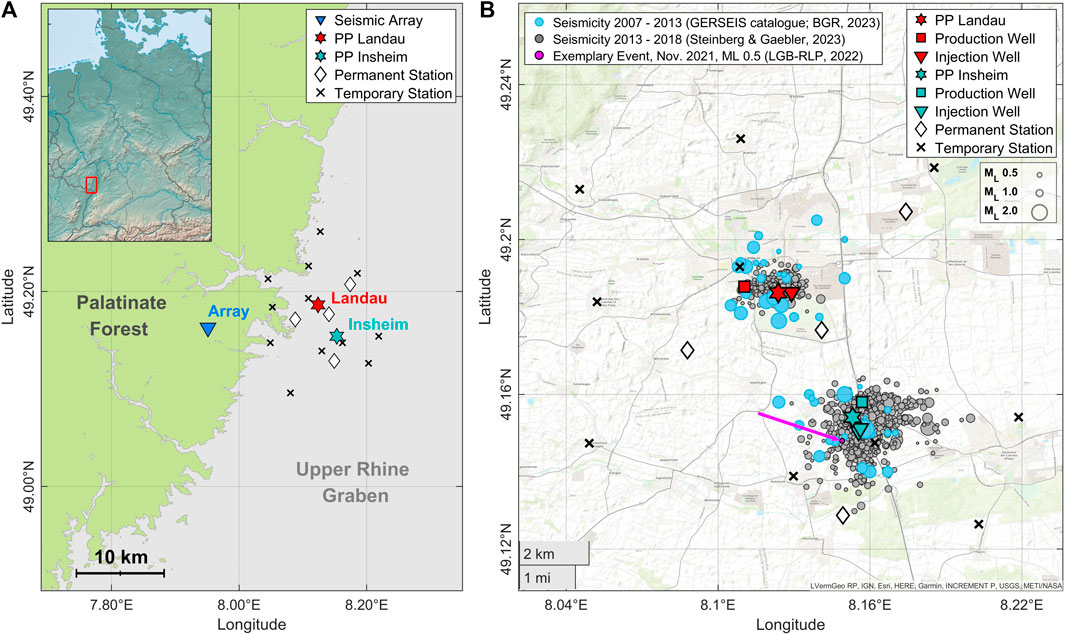
FIGURE 1. Overview of the study area in southwestern Germany. (A) Geological setting with the seismic array (blue triangle) located in the Palatinate Forest and the power plants (PP) Landau (red star) and Insheim (cyan star) located in the Upper Rhine Graben (URG). Stations of the Südpfalz network are distributed within the URG, surrounding both power plants. They include permanent (black diamonds) and temporary (black crosses) installations, operated by the LGB-RLP and the BGR. (B) Seismicity associated with the Landau and Insheim power plants for the period from 2007 to 2018. Events for the years 2007–2013 (blue circles) belong to the GERSEIS database (BGR, 2023). Grey circles show automatized localizations for the period from 2013 to 2018 (Steinberg & Gaebler, 2023). The exemplary event (19 November 2021, ML 0.5; LGB-RLP, 2022) shown in Figures 3–7 is indicated by the pink circle (see pink arrow).
The Landau and Insheim geothermal power plants are located 4
Since 2013, the seismic activity in both reservoirs is monitored by the Federal Institute for Geosciences and Natural Resources (BGR) and the Geological Survey and Mining Authority of Rhineland-Palatinate (LGB-RLP). In addition to the permanent network, a temporary network of seismic stations is operational since 2020 (Südpfalz network). Real-time event detection is implemented using template correlation (Vasterling et al., 2017); localizations are performed manually by the LGB-RLP (LGB-RLP, 2022).
The seismic array was installed in June 2021 in the Palatinate Forest, a small mountain range at the western border of the URG, which is characterized by Buntsandstein formations (e.g., Haneke & Weidenfeller, 2010). The distances to the power plants in Landau and Insheim are 12.5
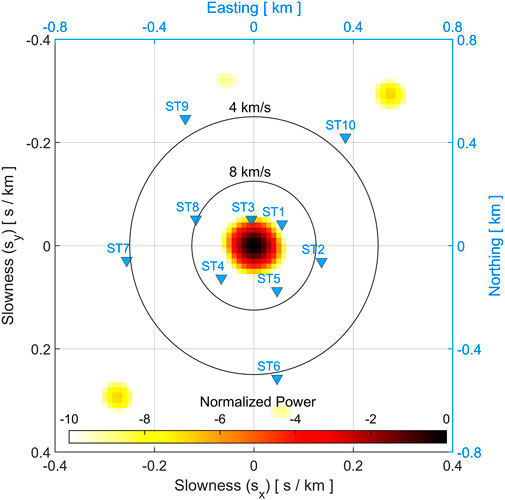
FIGURE 2. Array transfer function and site geometry. The array transfer function is shown in the horizontal (
3 Methods
The slowness vector
Here, the position vector
Most array processing techniques estimate the slowness vector in the horizontal plane exclusively. This requires an array setup with marginal differences in elevation. Schweitzer et al. (2012) state that elevation correction factors should be applied if deviations in time delay become larger than ¼ of the dominant signal period. These correction terms involve assumptions about the usually unknown subsurface velocity beneath the array (
A common procedure to estimate the wavefront parameters
where
The array response function characterizes the array pattern in the wavenumber space at a given frequency. In Figure 2 it is shown for the array in the Palatinate Forest, for a slowness range from −0.4 to 0.4
Eq. 2.1 can be evaluated over a grid in the horizontal slowness plane, where the location of the energy maximum provides an estimate for the back azimuth and horizontal apparent velocity of the incident plane wave. The method is referred to as frequency-wavenumber (f-k) analysis.
In our work, we use observed inter-station delay times to estimate the slowness vector
3.1 Delay time estimation
We use a normalized cross-correlation function to obtain estimates for the delay times related to an incoming seismic wavefront (e.g., Claerbout, 1986; Olsen & Szuberla, 2005). The normalized cross correlation-function (
with
The travel time difference (delay time,
The function
The associated delay time vector
Eqs. 3, 4 are evaluated in fixed time steps, which results in continuous functions of the median cross correlation matrix
The choice of
Figure 3 demonstrates the principles of the method for an exemplary event from the Insheim reservoir, recorded on 19 November 2021. It has a local magnitude (ML) of 0.5 and the network localization involves a theoretical back azimuth angle of 97.5° at the array (see Figure 3A). The time series (Figure 3B) are band pass filtered (between 5 Hz and 25 Hz) and a 1.5
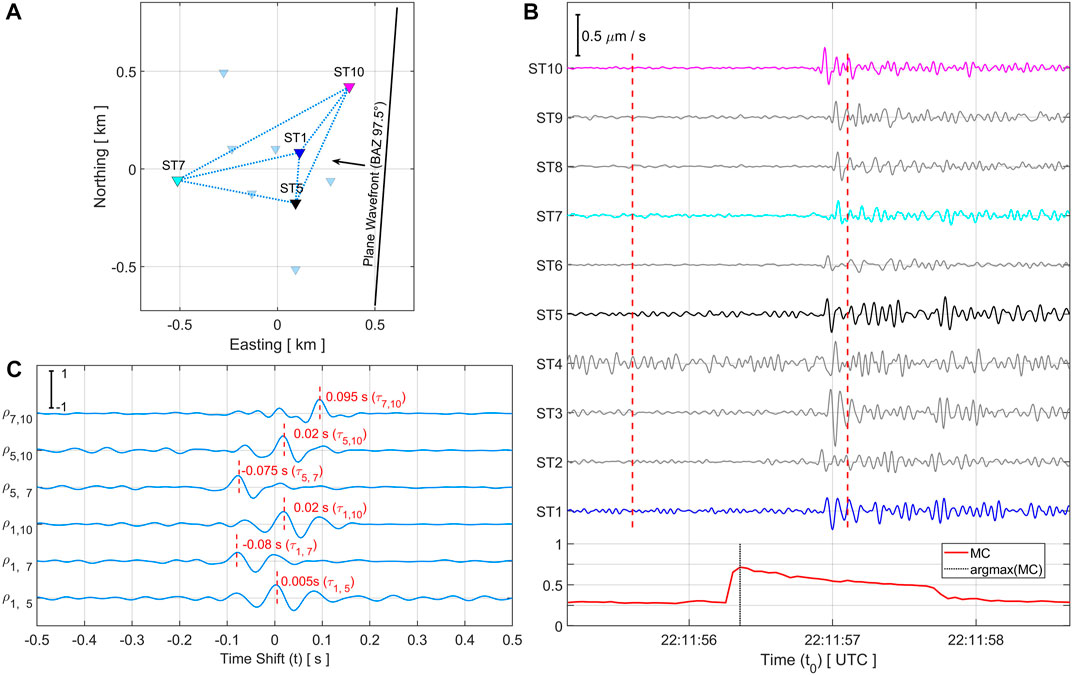
FIGURE 3. Delay time estimation for an exemplary event from the Insheim reservoir (ML 0.5, BAZ to network localization: 97.5°). (A) Station geometry and orientation of the plane wavefront. The colored sites are used to calculate the cross-correlation functions in C. (B) Waveforms of the vertical (Z) component from all 10 array sites, displaying the P-wave onsets. The waveforms are band-pass filtered between 5 and 25
The normalized cross-correlation function in Equation 3 performs well for adequate signal to noise conditions, but outliers in single observations can significantly bias subsequent calculations. We therefore recommend using a continuous evaluation of the median of the cross-correlation matrix (
3.2 Estimating the full 3-D slowness vector using linear regression
Del Pezzo and Giudicepietro (2002) and Olsen and Szuberla (2005) use a linear regression model to fit a vector of inter-station delay times (
where
The solution of the regression model is crucial to get accurate parameter estimates. M-estimators (maximum likelihood-type; Huber, 1981) provide a broad class of extremum estimators and allow for the inclusion of robust statistics (see section 3.2.1). They are a generalization of the objective function in L1- (least absolute deviation) and L2-norm (least squares) regression and estimate the maximum of the likelihood function for a parameter vector
Here,
With
If the errors in
where
The deviation between observed (
with
The square-root of the diagonal variances are the standard errors of the regression coefficients (
where
The back azimuth angle
We calculate the associated errors using error propagation (see Szuberla & Olsen, 2004; De Angelis et al., 2020), neglecting the coefficient co-variances, which are in average ten times smaller than the variances. This follows the assumption of uncorrelated errors in the predictor variables.
Figure 4 shows regression results for the exemplary event from the Insheim reservoir, with delay times
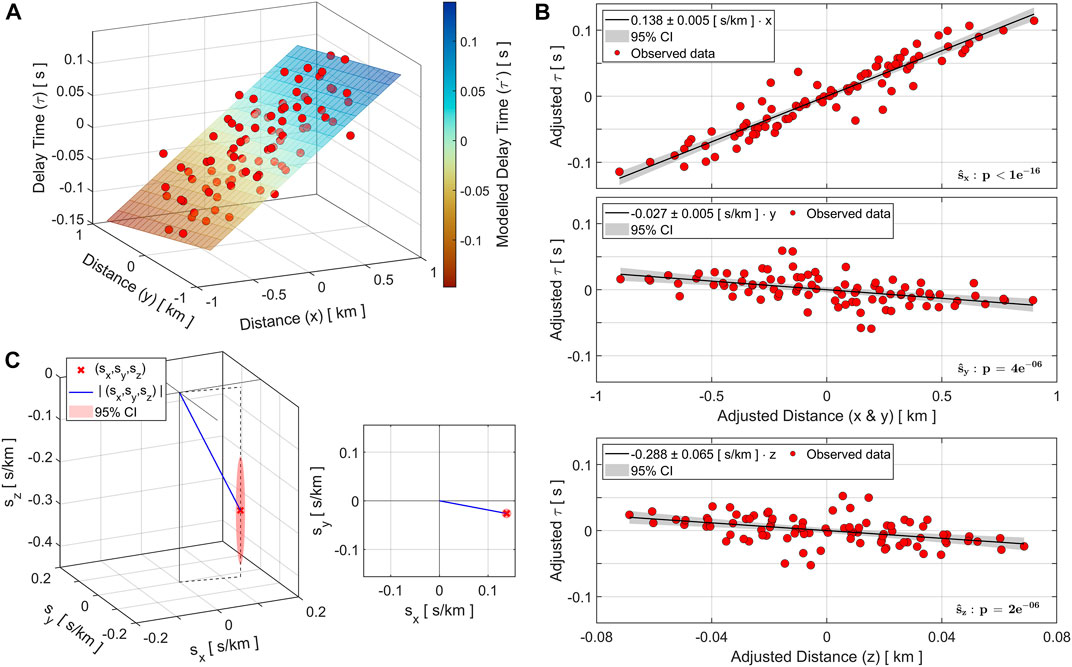
FIGURE 4. Estimation of the full slowness vector using least squares regression. (A) The red circles show the observed delay times for the exemplary event in the Insheim reservoir (ML 0.5, BAZ to network localization: 97.5°), plotted against the horizontal inter-station distances (
Our results show that the inclusion of elevation differences in the regression model allows for an estimation of the vertical slowness component (
3.2.1 Robustness
Outliers in the response and predictor variables can significantly bias ordinary least squares regression and require careful consideration. The statistical definition of an outlier refers to observations that deviate significantly from other members of the underlying data distribution (e.g., Grubbs, 1969 or Rousseuw, 1984). In case of seismic arrays, outliers are delay time observations that are inconsistent with the plane wave model (Bishop et al., 2020). They can relate to a low signal to noise ratio at one or multiple sites, timing errors (clock drift or failure) or strong subsurface distortion at individual sites.
The effects from outliers on linear regression are well studied and robust estimators are designed to weaken or eliminate their influence (e.g., Rousseeuw & Leroy 1987). We tested and compared the performance of a Biweight M-estimator, implemented via iteratively reweighted least squares (IRLS), and least trimmed squares (LTS) regression (see Supplementary Text S1, Supplementary Figure S1 and Supplementary Figure S2 for details). The results show that the Biweight M-estimator yields stable and consistent results for BAZ and apparent velocity, even for large quantities of outliers (>25%). IRLS proves to be particularly well suited, as it diminishes effects from outliers by dragging them towards a normal distribution, whilst the parameter estimates are still defined by the mean of the data. Here, the algorithm minimizes the exclusion of data. In this regard it is similar to the limited sensor pair correlation approach (Gibbons et al., 2018), which improves the robustness of an f-k analysis by excluding weakly correlated sensor pairs.
Our implementation of the Biweight M-estimator follows Beaton and Tukey (1974), Holland and Welsch (1977) and Du Mouchel and O’Brien (1989). It adds a weighting term (
There is no analytical solution to this equation and we use a reweighted least squares algorithm (Beaton & Tukey, 1974) to iteratively adjust the weighting function. The algorithm starts from an ordinary least squares regression (
with
Here, the leverage values
The solution of the weighted least squares problem is defined as:
After each iteration, the loss function from Eq. 15 is evaluated:
The algorithm stops if the solution converges or if the iteration limit is reached. We chose the loss function
3.3 Comparison of methods
In this section, we compare results from iteratively reweighted least squares (IRLS) and ordinary least squares (OLS) regression to the widely used frequency-wavenumber (f-k) analysis (Capon, 1969). The performance and stability of an f-k analysis highly depends on the applied frequency band (see, e.g., Kværna & Ringdal, 1986 or Kværna & Doornbos, 1991). Generally, the application of suitable, fixed frequency bands is supposed to yield superior results in comparison to a wide-frequency band approach (Gibbons et al., 2005). At the same time, the width of the adapted frequency bands is crucial and should not be too small (Kværna & Ringdal, 1986; Gibbons et al., 2010).
We calculate the energy of the array beam according to Eq. 2.1 for a slowness-grid in the range from −0.4 to 0.4
Figure 5 evaluates the performance and stability of the OLS and IRLS regression methods and compares them to frequency-wavenumber analysis. Figure 5A shows the time dependent cross-correlation function for the exemplary event from the Insheim reservoir (ML 0.5, BAZ network localization: 97.5°). Figure 5B compares results for back azimuth and horizontal apparent velocity depending on the shift relative to the point of maximum correlation. It shows that the results are generally unreliable for negative time shifts. In this case, the analysis window does not include enough signal component (cf. Position of the time window at
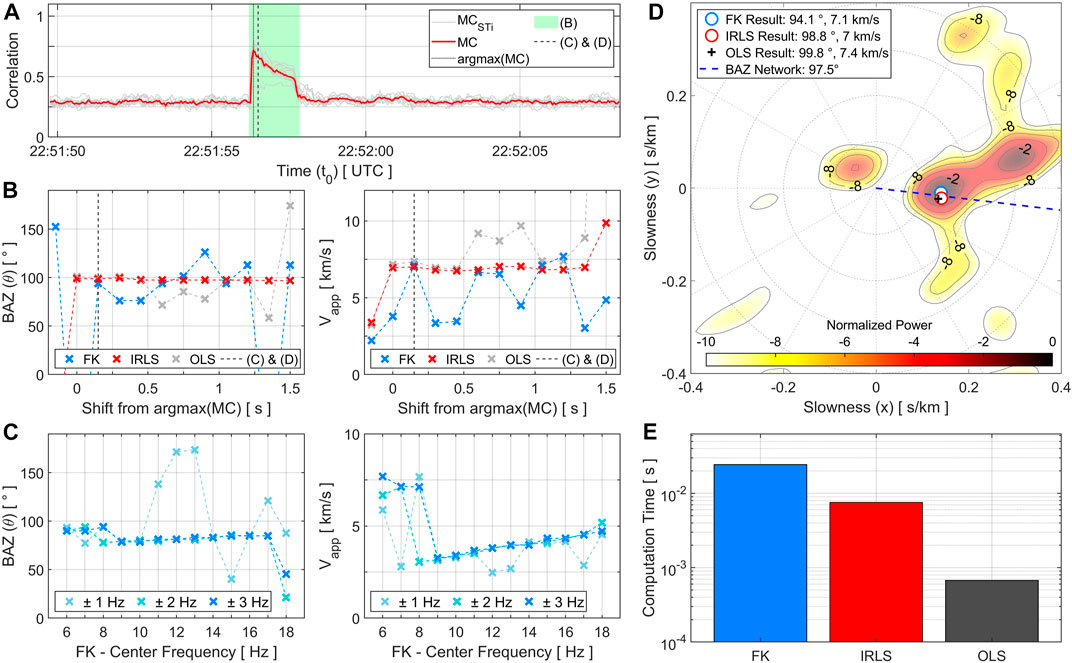
FIGURE 5. Comparison of processing methods for the exemplary event (ML 0.5, BAZ to network localization: 97.5°). (A) Median of the cross-correlation matrix (
The computation time is of great relevance regarding real-time applications. It is compared for all three approaches using a modern desktop computer (Figure 5E). All methods take less than 0.1 s for one calculation. However, OLS regression is almost 50 times and IRLS approximately 4 times faster if compared to an f-k analysis. Considering that IRLS results are significantly more stable than OLS, the IRLS algorithm appears to be a good trade-off between computational efficiency and accuracy, which makes it an excellent choice for real-time application.
3.4 Distance estimation
The determination of P- and S-wave arrival times is a key task in localizing earthquakes. Many current approaches apply deep learning algorithms, which perform very efficient in real-time applications, but require extensive training data sets (usually 10th of thousands of events, e.g., Mousavi et al., 2020 or Li et al., 2022). Another well-established method is the autoregressive Akaike-Information-Criterion (AR-AIC; e.g., Sleeman and Van Eck, 1999), which uses autoregressive filtering to estimate the wave onset as a maximization of the likelihood function in dependence of the division point between two locally stationary signal segments.
Here, we apply a statistical changepoint approach, which, similar to the AC-AIC, divides a time series signal into two locally stationary segments and evaluates a global statistical parameter for each part (see, e.g., Sen & Srivastava, 1975; Chen & Gupta, 2001 or Shi et al., 2022). The changepoint is then derived through a minimization of a loss function, defined by the residuals from the individual samples with reference to the global parameters.
For decent signal to noise ratios, the onset of a seismic signal usually involves an increase in the signal’s standard deviation. Assuming a time series
The signal onset
and simultaneously fulfills
i.e., the introduction of a changepoint must improve the cost function. We implement the cost function as a least absolute deviation model (a L1-normalization), which is usually less sensitive to outliers if compared to least squares. Equation 20.1 can be solved by a penalized likelihood approach (see Yao, 1988 or Chen and Gupta, 1997) and the application of a suitable information criterion (here, Bayesian Information Criterion, BIC). The method can be generalized to search for multiple changepoints using, e.g., binary segmentation (Sen & Srivastava, 1975), the segmented neighborhood approach (Auger and Lawrence, 1989), or the OP and PELT methods (Jackson et al., 2005; Killik et al., 2012). For a scenario where the approximate travel time difference between P- and S-wave is predictable (e.g., when monitoring reservoirs), it is more efficient to apply two single changepoint searches within appropriate time windows. In general, the search for a statistical changepoint can be extended to the spectral domain (e.g., Picard, 1985), which might yield improved results for limited signal to noise conditions.
Similar to the AR-AIC, the determination of wave onsets using changepoint analysis depends on an initial estimate of the P-wave arrival. Here, the maximum of the median of the cross-correlation function (
The median absolute deviation of the individual arrival times from their median is used for error estimation (Hampel, 1986):
where the value
Figures 6A, B show continuous evaluations of
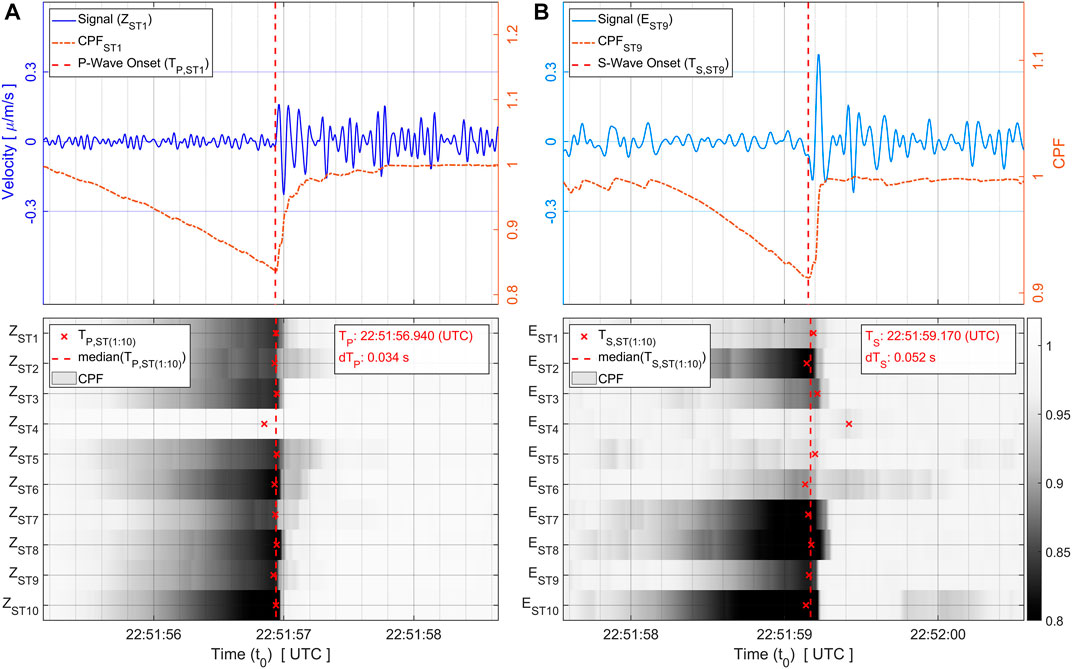
FIGURE 6. Determination of statistical changepoints for the P- and S-wave arrivals for the exemplary event from the Insheim reservoir (ML 0.5, BAZ to network localization: 97.5°). (A) Top: Z component recorded at station ST1 (zero phase filter between 5 and 25
Assuming a homogeneous velocity distribution, the epicentral distance
Associated errors are derived using error propagation:
The final localization of an event is defined by the distance
Latitude and Longitude are calculated with reference to the geometrical mean of the array coordinates.
4 Results for the Insheim and Landau deep-geothermal reservoirs
We compare our results to a data catalogue of 77 induced seismic events from the Insheim and Landau deep-geothermal reservoirs. The catalogue was provided by the Geological Survey and Mining Authority of Rhineland-Palatinate (LGB-RLP, 2022). It covers a period from July 2021 to May 2022 and includes events in the magnitude range from ML -0.2 to ML 1.3. The events were detected using the Südpfalz network (LGB-RLP, 2022) and a template correlation detector (Vasterling et al., 2017). Localizations were performed using Seismic Handler (Stammler, 1993) and an optimized minimum 1-D velocity model (Küperkoch et al., 2018).
We re-localize all events using the seismic array in the Palatinate Forest and the methods introduced in section 3. The data from all 10 sites are taken in 20 s windows, starting 5 s ahead of the source times defined by the data catalogue. The waveforms are bandpass filtered between 5 and 25
Figure 7A shows processing results for the exemplary event from the Insheim reservoir (19 November 2021; ML 0.5). The solutions for back azimuth and horizontal apparent velocity are very consistent during the period of increased correlation, which is associated with the seismic phases traversing the array. The upper plot additionally shows
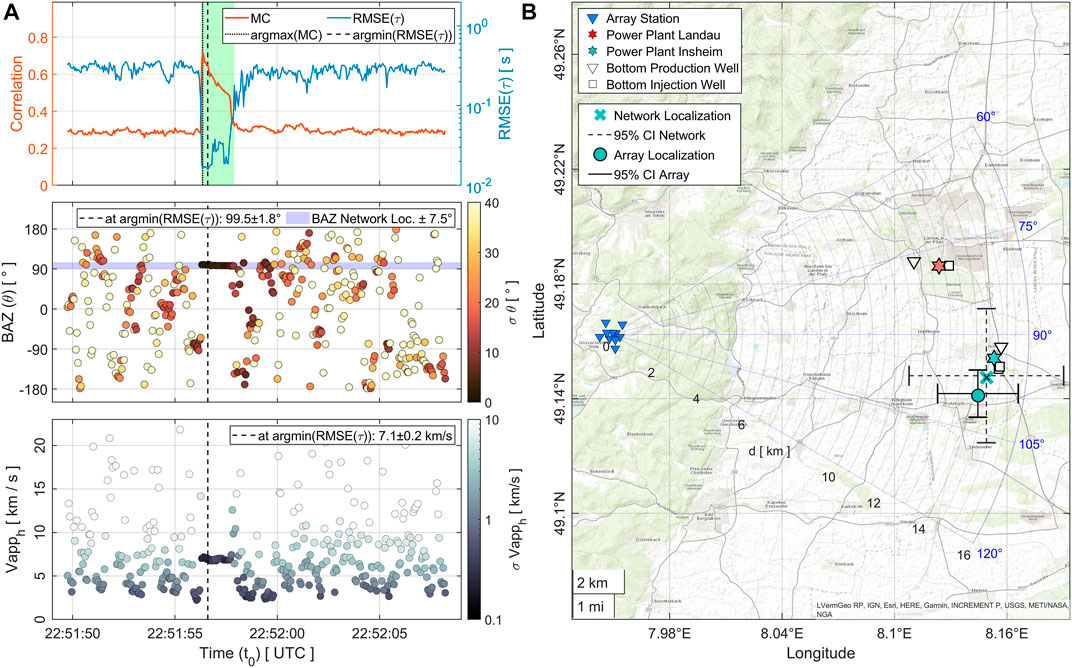
FIGURE 7. Results for the exemplary event in the Insheim Reservoir (ML 0.5). (A) Top: Median of the cross-correlation matrix (
Figure 8 compares array and network localizations for the entire data catalogue (Figure 8A). Most array localizations form distinct clusters and can be clearly attributed to either the Insheim or the Landau reservoir (Figure 8B). However, there are some outliers that do not yield reliable results and are far from the network localizations (small map in Figure 8B). Figure 8C gives an overview of the statistics for the array and network localizations. Here, the BAZ and distance of the network localizations are given with reference to the position of the array. The distance estimates resulting from the array analysis are very consistent and usually within a few hundred meters from the network localization. The BAZ values, however, reveal a small and systematic misdirection of +4.1° for the Insheim and – 4.7° for the Landau events.
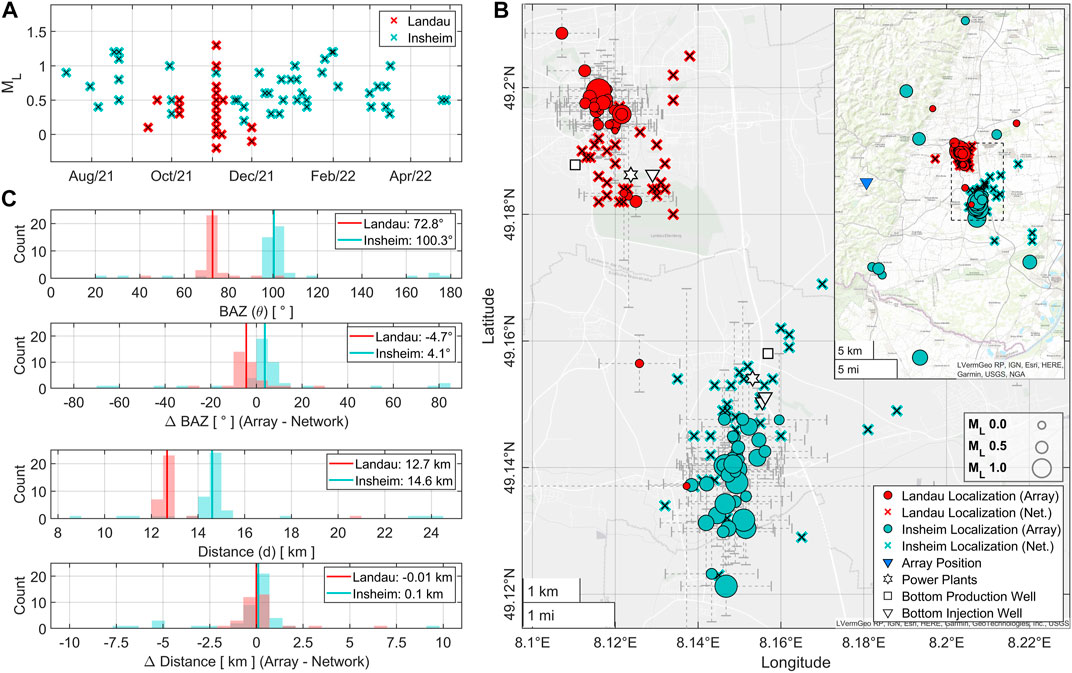
FIGURE 8. Comparison between array and network localizations for 77 induced events from the Insheim and Landau deep-geothermal reservoirs. (A) Local magnitudes (ML) for events in the Insheim (cyan crosses) and Landau (red crosses) reservoirs in the period from July 2021 to May 2022 (data catalogue; LGB-RLP, 2022). (B) Map view of the array (circles) and network localizations (crosses) close to the power plants. The Landau and Insheim clusters are well separated. Error bars in the background represent the standard errors for the array localizations (
To investigate the quality of the array analysis, Figure 9A visualizes the array localizations, color-coded by the weighted root mean squared error of the regression analysis (cf. equations 10 and 18). The outlying localizations clearly correspond to low-quality linear regression models and involve large standard errors (
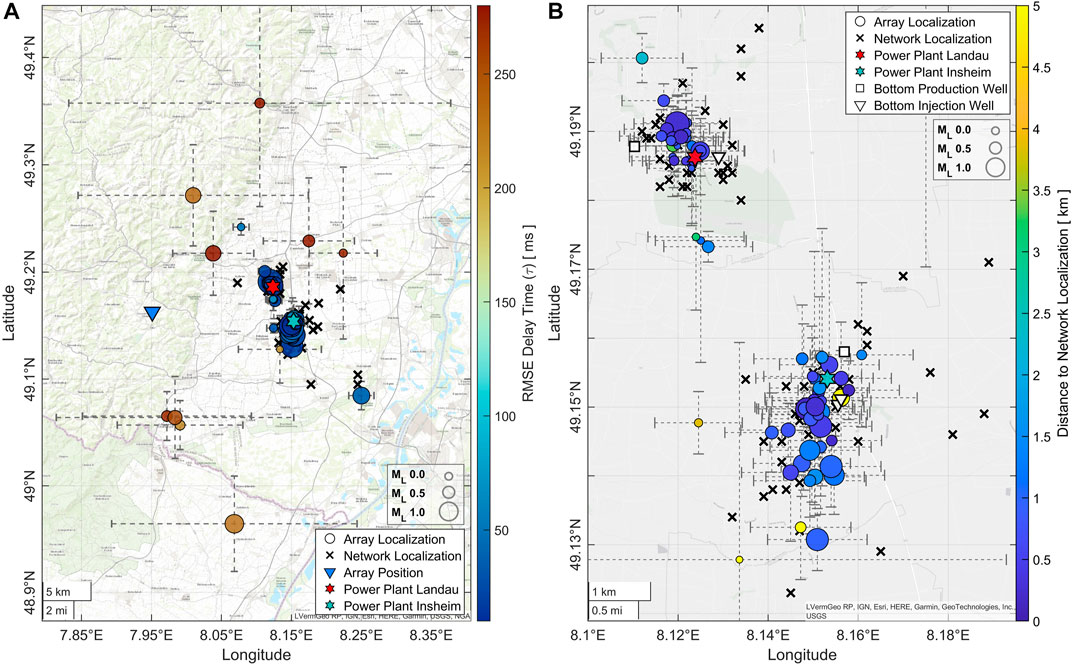
FIGURE 9. Performance of the array analysis. (A) Map view of the array (circles) and network localizations (black crosses). The array localizations are color coded by the
5 Discussion
Most of the array localizations show a remarkable agreement with the network localizations (median deviation <1 km) and especially the distance estimates are highly consistent. The BAZ calculations feature a systematic misdirection, which can be attributed to either an inadequate velocity model (i.e., 2-D/3-D effects) or local subsurface heterogeneities at the array. The assumption of a uniform velocity distribution is a simplification, and the velocity models are designed to localize seismicity from the two reservoirs. Therefore, the implementation of a more accurate velocity model could further improve the localization accuracy within the reservoirs.
Examining the outliers reveals a direct link between low-quality regression results (i.e., large
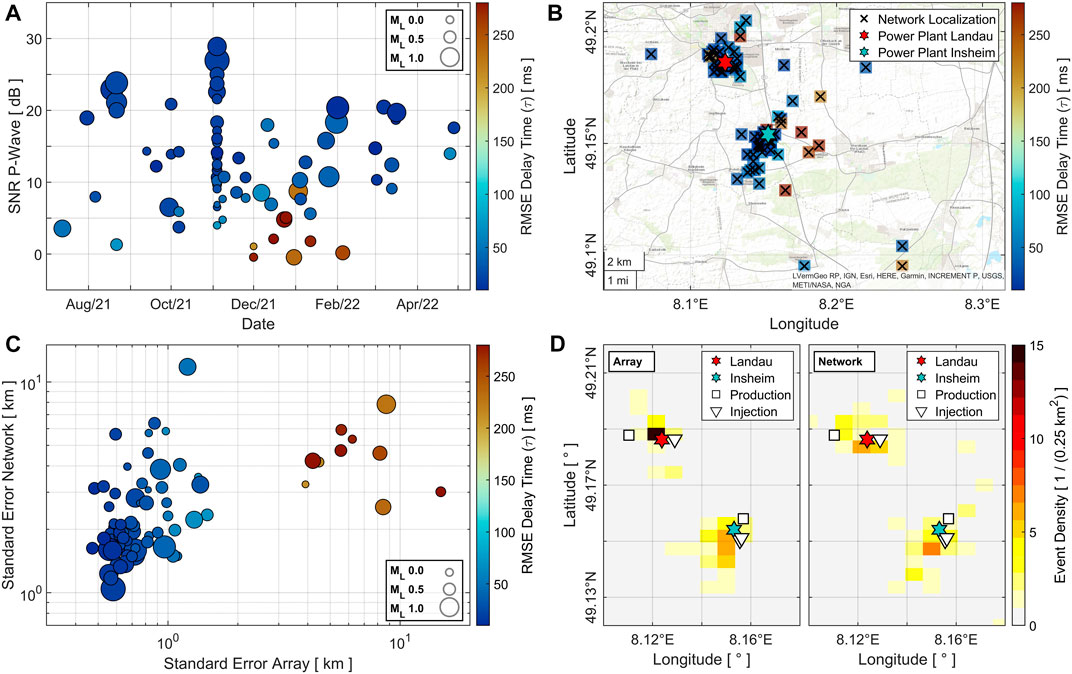
FIGURE 10. Origin of the outliers, statistical errors and distribution of the seismicity within the reservoirs. (A) Signal to noise ratio (SNR) of the P-Waves plotted against the time of occurrence and color coded by the
The statistical errors for the array and network localizations consistently increase with decreasing localization quality (Figure 10C). This is a good validation of the error calculation, which is crucial for the quality assessment during real-time processing. The standard errors associated with low-quality array localizations, derived in the winter of 2021/2022, are exceptionally large and coincide with large errors for the corresponding network localizations. It is important to note that the errors from the array analysis are generally smaller when compared to errors resulting for the network localizations. This might partly be due to the different calculation approaches, but more likely it reflects the superior location characteristics at the array. Here, the seismic noise level is in average 0.1
Figure 10D examines the distribution of the seismicity within the two reservoirs, separately for array and network localizations. It shows that the array results cluster more distinctly, especially for the Landau reservoir. Here, the events focus between injection and production well. The corresponding network localizations also mainly occur between injection and production side, but they scatter more widely. In the case of the Insheim reservoir, seismicity is concentrated southwest of the injection wells for both localization methods. Again, the horizontal variation is smaller for the array localizations. At this point it is difficult to conclude which results are more accurate. Looking at source-receiver distances exclusively, the 1-D velocity model used in the network analysis is not superior to an optimized uniform model. However, the missing depth dependence in the array approach also affects the epicentral localization.
Our regression approach includes inter-station elevation differences, which allows for estimates of the full 3-D slowness vector. In Figure 11 we investigate results for the horizontal and vertical apparent velocities (
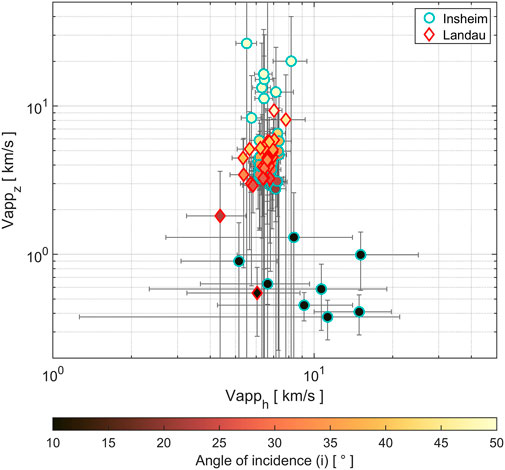
FIGURE 11. Horizontal and vertical apparent velocity and vertical angle of incidence for 77 induced events from the Insheim and Landau deep-geothermal reservoirs. Red and cyan marker edgings indicate results for the Landau and Insheim reservoirs, respectively. The color of the markers shows the corresponding angle of incidence
Our analysis shows that conventional array processing techniques, such as f-k analysis or OLS regression, are highly sensitive to outlying data points and can heavily rely on manual adjustments of the evaluation parameters (window size and position, frequency band). Here, the IRLS algorithm, in combination with the Biweight function, must be preferred. It yields stable and consistent results, even in the presence of corrupted data. In comparison to a regular f-k analysis, it is less sensitive to the frequency band (but requires SNR >1 for the P wave onset) and is computationally more efficient. The application of the algorithm to real-time data involves a continuous evaluation of the cross-correlation function and continuous robust estimations of the slowness vector and associated uncertainties. If the correlation function exceeds a certain threshold, distance estimates are calculated. In case of insufficient processing results, indicated by the statistical errors, the event can be re-evaluated using an adapted frequency band. Here, an automatized choice of the filter settings can be based on the cross-spectral matrix of the signals. The computational efficiency of the algorithm would also allow for a second evaluation stream (i.e., secondary continuous calculations of the cross-correlation, the slowness vector and associated uncertainties) within a different frequency band.
6 Conclusion
We investigate the suitability of seismic arrays for monitoring multiple geothermal reservoirs from one central remote location. Here, the increased distance to the source requires accurate processing techniques to receive reliable earthquake localizations. We therefore employ robust linear regression to estimate the slowness vector of seismic phases and use statistical changepoint analysis to obtain automatized P- and S-wave arrival times, which can be used for distance calculations. The comparison to standard array processing tools, such as ordinary least-squares regression and f-k analysis, demonstrates that a robust approach is crucial to achieve localization accuracy suitable for geothermal monitoring. We further validate our results using a data catalogue of 77 network localizations for the Landau and Insheim deep-geothermal reservoirs, located in the Upper Rhine Graben. It shows that we can clearly separate earthquakes originating from the two reservoirs and the quality of the array localizations is at least comparable to those from the seismic network. Moreover, the remote location of the array involves a significantly lower level of seismic noise compared to the seismic network. This enhances the sensitivity to small magnitude events and ensures surveillance during noisy episodes.
Estimating the slowness vector of a seismic phase using linear regression relies on observed delay times, derived from inter-station cross-correlation functions. Here, we recommend using the median of the cross-correlation matrix as a robust trigger function as it remains unaffected by correlated noise between single station pairs or degraded signal to noise conditions at specific array sites.
We further demonstrate that incorporating elevation differences into the regression model allows for an estimation of the vertical slowness component (
When a set of observed delay times includes outliers, the use of robust array processing techniques is crucial. We therefore implement and test robust regression estimators for seismic array data. Here, iteratively reweighted least squares in combination with a Biweight function yields reliable parameter estimates, that are significantly more stable compared to conventional least squares regression and f-k analysis. The algorithm is computationally efficient, making it well suited for real-time applications.
To obtain P- and S-wave arrivals by an automated approach, we introduce statistical changepoint analysis as an alternative to autoregressive prediction. The determination of a statistical changepoint only relies on the calculation of a basic statistical parameter and not on autoregressive filtering. This makes it computationally more efficient, at least when the search problem is restricted to a single changepoint. The quality of the estimated arrival times is remarkable, resulting in highly accurate distance estimates for the array localizations.
The final comparison between network and array localizations shows that the results are very consistent. Most array localizations form distinct clusters that can be clearly attributed to either the Insheim or the Landau reservoir. A few outliers for the array localizations in the period between December 2021 and February 2022, coincide with low-quality network localizations in the outer reservoir domains. Upon closer examination of the seismicity within the two reservoirs, it becomes evident that the array results cluster more distinctly than the network results. Furthermore, the statistical errors from the array analysis are generally smaller compared to those from the network localizations. This reflects the superior location characteristics at the array, where the average seismic noise level is about 100 times lower than in the Upper Rhine Graben. As a result, the quality of the epicentral array localizations is at least comparable with those derived from the network.
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Author contributions
PH was responsible for the planning and setup of the seismic array. He developed the methodology and the software used to obtain the results and wrote the initial draft of the manuscript. ML was involved in the planning and realisation of the project. He participated in the determination of the array layout and setup and contributed to the final draft of the manuscript. GR conceived and initiated the project, taking responsibility for its execution. All authors contributed to the article and approved the submitted version.
Funding
This work was funded through the Federal Ministry for Economic Affairs and Climate Action of the Federal Republic of Germany as part of the SEIGER (Seismic monitoring of deep geothermal power plants and possible seismic impact) research project (FKZ 03EE4003F).
Acknowledgments
We thank the Geological Survey and Mining Authority of Rhineland-Palatinate (LGB-RLP), and particularly Bernd Schmidt and Helmuth Winter, for their support during the setup of the array and for providing the earthquake catalogue. We thank KH, FN, VT, LDS for their careful and constructive comments, which improved the manuscript.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/feart.2023.1217587/full#supplementary-material
References
Akaike, H. (1973). Maximum likelihood identification of Gaussian autoregressive moving average models. Biometrika 60 (2), 255–265. doi:10.1093/biomet/60.2.255
Auger, I. E., and Lawrence, C. E. (1989). Algorithms for the optimal identification of segment neighborhoods. Bull. Math. Biol. 51 (1), 39–54. doi:10.1016/S0092-8240(89)80047-3
Bartz, J. (1974). “Die Mächtigkeit des Quartärs im Oberrheingraben,” in Approaches to taphrogenesis. Editors J. H. Illies, and K. Fuchs (Stuttgart, Germany: Schweitzerbarth), 78–87.
Beaton, A. E., and Tukey, J. W. (1974). The fitting of power series, meaning polynomials, illustrated on band-spectroscopic data. Technometrics 16 (2), 147–185. doi:10.1080/00401706.1974.10489171
BGR, (2023). Bundesanstalt für Geowissenschaften und Rohstoffe. https://www.bgr.bund.de/DE/Themen/Erdbeben-Gefaehrdungsanalysen/Seismologie/Seismologie/GERSEIS/gerseis_node.html (Accessed June 02, 2023).
Bishop, J. W., Fee, D., and Szuberla, C. A. (2020). Improved infrasound array processing with robust estimators. Geophys. J. Int. 221 (3), 2058–2074. doi:10.1093/gji/ggaa110
Brune, J., and Thatcher, W. (2002). “Strength and energetics of active fault zones,” International handbook of earthquake and engineering seismology, Part A. Editors W. H. K. Lee, H. Kanamori, C. J. Paul, and H. Kisslinger (Int. Assoc. Seismol. Phys. Earth's Interior, Comm. Educ), 81, 569–588.
Cansi, Y. (1995). An automatic seismic event processing for detection and location: The PMCC method. Geophys. Res. Lett. 22 (9), 1021–1024. doi:10.1029/95GL00468
Capon, J. (1969). High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 57 (8), 1408–1418. doi:10.1109/PROC.1969.7278
Chen, J., and Gupta, A. K. (1997). Testing and locating variance changepoints with application to stock prices. J. Am. Stat. Assoc. 92 (438), 739–747. doi:10.1080/01621459.1997.10474026
Chen, J., and Gupta, A. K. (2001). On change point detection and estimation. Commun. statistics-simulation Comput. 30 (3), 665–697. doi:10.1081/SAC-100105085
Claerbout, J. F. (1986). Fundamentals of geophysical data processing, 2nd edn. J. R. Astron. Soc. 86, 217–219. doi:10.1111/j.1365-246X.1986.tb01085.x86
Coombs, M. L., Wech, A. G., Haney, M. M., Lyons, J. J., Schneider, D. J., Schwaiger, H. F., et al. (2018). Short-term forecasting and detection of explosions during the 2016–2017 eruption of Bogoslof volcano, Alaska. Front. Earth Sci. 6, 122. doi:10.3389/feart.2018.00122
Cornet, F. H., Helm, J., Poitrenaud, H., and Etchecopar, A. (1997). Seismic and aseismic slips induced by large-scale fluid injections. Pure Appl. Geophys. 150, 563–583. doi:10.1007/978-3-0348-8814-1_12
Cornet, F. H., and Jianmin, Y. (1995). Analysis of induced seismicity for stress field determination and pore pressure mapping. PAGEOPH 145, 677–700. doi:10.1007/BF00879595
Cornet, F. H., and Julien, Ph. (1989). Stress determination from hydraulic test data and focal mechanisms of induced seismicity. Int. J. Rock Mech. Min. Sci. Geomechanics Abstr. 26 (3-4), 235–248. doi:10.1016/0148-9062(89)91973-6
Cuenot, N., Dorbath, C., and Dorbath, L. (2008). Analysis of the microseismicity induced by fluid injections at the EGS site of soul-sous-forêts (alae, France): Implications for the characterization of the geothermal reservoir properties. Pure Appl. Geophys. 165, 797–828. doi:10.1007/s00024-008-0335-7
De Angelis, S., Haney, M. M., Lyons, J. J., Wech, A., Fee, D., Diaz-Moreno, A., et al. (2020). Uncertainty in detection of volcanic activity using infrasound arrays: Examples from Mt. Etna, Italy. Front. Earth Sci. 8, 169. doi:10.3389/feart.2020.00169
Del Pezzo, E., and Giudicepietro, F. (2002). Plane wave fitting method for a plane, small aperture, short period seismic array: A MATHCAD program. Comput. geosciences 28 (1), 59–64. doi:10.1016/S0098-3004(01)00076-0
Doebl, F., and Olbrecht, W. (1974). “An isobath map of the Tertiary base in the Rhinegraben,” in Approaches to taphrogenesis. Editors J. H. Illies, and K. Fuchs (Stuttgart, Germany: Schweitzerbarth), 71–72.
Dornstadter, J., Kappelmeyer, O., and Welter, M. (1999). “The geothermal potential in the Upper Rhine Graben valley,” in Proceedings of the European Geothermal Conference Basel '99 (Basel, Switzerland) 2, 77–85.
Douglas, A., Bowers, D., Marshall, P. D., Young, J. B., Porter, D., and Wallis, N. J. (1999). Putting nuclear-test monitoring to the test. Nature 398 (6727), 474–475. doi:10.1038/19000
Dumouchel, W., and O’brien, F. (1989). “Integrating a robust option into a multiple regression computing environment,” in Computer science and statistics: Proceedings of the 21st symposium on the interface (Alexandria, Egypt: American Statistical Association), 297–302.
Evans, K. F., Zappone, A., Kraft, T., Deichmann, N., and Moia, F. (2012). A survey of the induced seismic responses to fluid injection in geothermal and CO2 reservoirs in Europe. Geothermics 41, 30–54. doi:10.1016/j.geothermics.2011.08.002
Farahbod, A. M., Kao, H., Cassidy, J. F., and Walker, D. (2015). How did hydraulic-fracturing operations in the Horn River Basin change seismicity patterns in northeastern British Columbia, Canada? Lead. Edge 34 (6), 658–663. doi:10.1190/tle34060658.1,
Gibbons, S. J., Kværna, T., and Ringdal, F. (2010). Considerations in phase estimation and event location using small-aperture regional seismic arrays. Pure Appl. Geophys. 167, 381–399. doi:10.1007/s00024-009-0024-1
Gibbons, S. J., Kværna, T., and Ringdal, F. (2005). Monitoring of seismic events from a specific source region using a single regional array: A case study. J. Seismol. 9, 277–294. doi:10.1007/s10950-005-5746-7
Gibbons, S. J., Näsholm, S. P., Ruigrok, E., and Kværna, T. (2018). Improving slowness estimate stability and visualization using limited sensor pair correlation on seismic arrays. Geophys. J. Int. 213 (1), 447–460. doi:10.1093/gji/ggx550
Gibbons, S. J., Ringdal, F., and Kværna, T. (2008). Detection and characterization of seismic phases using continuous spectral estimation on incoherent and partially coherent arrays. Geophys. J. Int. 172 (1), 405–421. doi:10.1111/j.1365-246X.2007.03650.x
Groos, J. C., and Ritter, J. R. (2014). Verbundprojekt MAGS - konzepte zur Begrenzung der mikroseismischen Aktivität bei der energetischen Nutzung geothermischer Systeme im tiefen Untergrund, Einzelprojekt 1: Quantifizierung und Charakterisierung des induzierten seismischen Volumens im Bereich Landau/Südpfalz. Germany: Karlsruher Institut für Technologie, Final Report of the Project MAGS.
Grubbs, F. E. (1969). Procedures for detecting outlying observations in samples. Technometrics 11 (1), 1–21. doi:10.1080/00401706.1969.10490657
Grünthal, G. (2014). Induced seismicity related to geothermal projects versus natural tectonic earthquakes and other types of induced seismic events in Central Europe. Geothermics 52, 22–35. doi:10.1016/j.geothermics.2013.09.009
Grünthal, G., and Wahlström, R. (2012). The European-Mediterranean earthquake catalogue (EMEC) for the last millennium. J. Seismol. 16, 535–570. doi:10.1007/s10950-012-9302-y
Haneke, J., and Weidenfeller, M. (2010). “Die geologischen baueinheiten der Pfalz,” in Geographie der Pfalz (Landau/Pfalz, Germany: Pfälzische Landeskunde).
Haney, M. M., Van Eaton, A. R., Lyons, J. J., Kramer, R. L., Fee, D., and Iezzi, A. M. (2018). Volcanic thunder from explosive eruptions at Bogoslof volcano, Alaska. Geophys. Res. Lett. 45 (8), 3429–3435. doi:10.1002/2017GL076911
Holland, P. W., and Welsch, R. E. (1977). Robust regression using iteratively reweighted least-squares. Commun. Statistics-theory Methods 6 (9), 813–827. doi:10.1080/03610927708827533
Huber, P. J. (1973). Robust regression: Asymptotics conjectures and Monte Carlo. Ann. Statistics 1 (5), 799–821. doi:10.1214/aos/1176342503
Hurtig, E., Cermak, V., Haenel, R., and Zui, V. (1992). Geothermal atlas of Europe. Vienna, Austria: International Atomic Energy Agency.
Illies, J. H. (1972). The Rhine graben rift system-plate tectonics and transform faulting. Geophys. Surv. 1 (1), 27–60. doi:10.1007/BF01449550
Jackson, B., Scargle, J. D., Barnes, D., Arabhi, S., Alt, A., Gioumousis, P., et al. (2005). An algorithm for optimal partitioning of data on an interval. IEEE Signal Process. Lett. 12 (2), 105–108. doi:10.1109/LSP.2001.838216
Johnson, S. W., Chambers, D. J., Boltz, M. S., and Koper, K. D. (2021). Application of a convolutional neural network for seismic phase picking of mining-induced seismicity. Geophys. J. Int. 224 (1), 230–240. doi:10.1093/gji/ggaa449
Joswig, M. (1990). Pattern recognition for earthquake detection. Bull. Seismol. Soc. Am. 80 (1), 170–186. doi:10.1785/BSSA0800010170
Killick, R., Fearnhead, P., and Eckley, I. A. (2012). Optimal detection of changepoints with a linear computational cost. J. Am. Stat. Assoc. 107 (500), 1590–1598. doi:10.1080/01621459.2012.737745
King, D. W., Haddon, R. A. W., and Husebye, E. S. (1975). Precursors to PP. Phys. Earth Planet. Interiors 10 (2), 103–127. doi:10.1016/0031-9201(75)90029-1
King, D. W., Husebye, E. S., and Haddon, R. A. W. (1976). Processing of seismic precursor data. Phys. Earth Planet. Interiors 12 (2-3), 128–134. doi:10.1016/0031-9201(76)90042-X
Krüger, F., Dahm, T., and Hannemann, K. (2020). Mapping of Eastern North Atlantic Ocean seismicity from Po/So observations at a mid-aperture seismological broad-band deep sea array. Geophys. J. Int. 221 (2), 1055–1080. doi:10.1093/gji/ggaa054
Küperkoch, L., Meier, T., Brüstle, A., Lee, J., and Friederich, W. (2012). Automated determination of S-phase arrival times using autoregressive prediction: Application to local and regional distances. Geophys. J. Int. 188 (2), 687–702. doi:10.1111/j.1365-246X.2011.05292.x
Küperkoch, L., Meier, T., Lee, J., Friederich, W., and Egelados Working Group, (2010). Automated determination of P-phase arrival times at regional and local distances using higher order statistics. Geophys. J. Int. 181 (2), 1159–1170. doi:10.1111/j.1365-246X.2010.04570.x
Küperkoch, L., Olbert, K., and Meier, T. (2018). Long-term monitoring of induced seismicity at the Insheim geothermal site, Germany. Bull. Seismol. Soc. Am. 108 (6), 3668–3683. doi:10.1785/0120170365
Kværna, T., and Doornbos, D. J. (1991). Scattering of regionalP n by moho topography. Geophys. Res. Lett. 18 (7), 1273–1276. doi:10.1029/91GL01292
Kværna, T., and Ringdal, F. (1986). NORSAR scientific rep 1-86/87. Stab. Var. fk Estim. Tech., 29–40.
Lai, T. L., Robbins, H., and Wei, C. Z. (1978). Strong consistency of least squares estimates in multiple regression. PNAS 75 (7), 3034–3036. doi:10.1073/pnas.75.7.3034
Leonard, M., and Kennett, B. L. N. (1999). Multi-component autoregressive techniques for the analysis of seismograms. Phys. Earth Planet. Interiors 113 (1-4), 247–263. doi:10.1016/S0031-9201(99)00054-0
Leva, C., Rümpker, G., and Wölbern, I. (2022). Multi-array analysis of volcano-seismic signals at Fogo and Brava, Cape Verde. Solid earth. 13, 1243–1258. doi:10.5194/se-13-1243-2022
Leva, C., Rümpker, G., and Wölbern, I. (2020). Remote monitoring of seismic swarms and the August 2016 seismic crisis of Brava, Cabo Verde, using array methods. Nat. Hazards Earth Syst. Sci. 20 (12), 3627–3638. doi:10.5194/nhess-20-3627-2020
LGB-RLP, (2022). Landesamt für Geologie und Bergbau Rheinland-Pfalz. https://www.lgb-rlp.de/de/fachthemen/landeserdbebendienstrlp/forschungsprojekt-seiger.html (Accessed February 08, 2023).
Li, W., Chakraborty, M., Fenner, D., Faber, J., Zhou, K., Rümpker, G., et al. (2022). EPick: Attention-based multi-scale UNet for earthquake detection and seismic phase picking. Front. Earth Sci. 10. doi:10.3389/feart.2022.953007
Li, Z., and Zhan, Z. (2018). Pushing the limit of earthquake detection with distributed acoustic sensing and template matching: A case study at the Brady geothermal field. Geophys. J. Int. 215 (3), 1583–1593. doi:10.1093/gji/ggy359
Lomax, A., Virieux, J., Volant, P., and Berge-Thierry, C. (2000). “Probabilistic earthquake location in 3D and layered models,” in Advances in seismic event location. Modern approaches in geophysics. Editors C. Thurber, and N. Rabinowitz (Dordrecht, Netherlands: Springer), 101–134. doi:10.1007/978-94-015-9536-0_5
Majer, E. L., Baria, R., Stark, M., Oates, S., Bommer, J., Smith, B., et al. (2007). Induced seismicity associated with enhanced geothermal systems. Geothermics 36 (3), 185–222. doi:10.1016/j.geothermics.2007.03.003
Mousavi, S. M., Ellsworth, W. L., Zhu, W., Chuang, L. Y., and Beroza, G. C. (2020). Earthquake transformer—An attentive deep-learning model for simultaneous earthquake detection and phase picking. Nat. Commun. 11, 3952. doi:10.1038/s41467-020-17591-w
Olson, J. V., and Szuberla, C. A. (2005). Distribution of wave packet sizes in microbarom wave trains observed in Alaska. J. Acoust. Soc. Am. 117 (3), 1032–1037. doi:10.1121/1.1854651
Picard, D. (1985). Testing and estimating change-points in time series. Adv. Appl. Probab. 17 (4), 841–867. doi:10.2307/1427090
Plenkers, K., Ritter, J. R. R., and Schindler, M. (2013). Low signal-to-noise event detection based on waveform stacking and cross-correlation: Application to a stimulation experiment. J. Seismol. 17, 27–49. doi:10.1007/s10950-012-9284-9
Ritter, J. R., and Sudhaus, H. (2007). Characterization of small local noise sources with array seismology. Near Surf. Geophys. 5 (4), 253–261. doi:10.3997/1873-0604.2007007
Rost, S., and Thomas, C. (2002). Array seismology: Methods and applications. Rev. Geophys. 40 (3), 2–27. doi:10.1029/2000RG000100
Rousseeuw, P. J. (1984). Least median of squares regression. J. Am. Stat. Assoc. 79 (388), 871–880. doi:10.1080/01621459.1984.10477105
Rousseeuw, P. J., and Leroy, A. M. (1987). Robust regression and outlier detection. Hoboken, New Jersey, United States: John Wiley and Sons, Inc.
Schweitzer, J., Fyen, J., Mykkeltveit, S., Gibbons, S. J., Pirli, M., Kühn, D., et al. (2012). Seismic arrays. New Man. Seismol. observatory Pract. 2 (NMSOP-2), 1–80. doi:10.2312/GFZ.NMSOP-2_ch9
Sen, A., and Srivastava, M. S. (1975). On tests for detecting change in mean. Ann. Statistics 3, 98–108. doi:10.1214/aos/1176343001
Seydoux, L., Shapiro, N. M., De Rosny, J., and Landès, M. (2016). Spatial coherence of the seismic wavefield continuously recorded by the USArray. Geophys. Res. Lett. 43 (18), 9644–9652. doi:10.1002/2016GL070320
Shi, X., Gallagher, C., Lund, R., and Killick, R. (2022). A comparison of single and multiple changepoint techniques for time series data. Comput. Statistics Data Analysis 170, 107433. doi:10.1016/j.csda.2022.107433
Sick, B., Guggenmos, M., and Joswig, M. (2015). Chances and limits of single-station seismic event clustering by unsupervised pattern recognition. Geophys. J. Int. 201 (3), 1801–1813. doi:10.1093/gji/ggv126
Singh, M., and Rümpker, G. (2020). Seismic gaps and intraplate seismicity around Rodrigues Ridge (Indian Ocean) from time domain array analysis. Solid earth. 11 (6), 2557–2568. doi:10.5194/se-11-2557-2020
Sleeman, R., and Van Eck, T. (1999). Robust automatic P-phase picking: An on-line implementation in the analysis of broadband seismogram recordings. Phys. earth Planet. interiors 113 (1-4), 265–275. doi:10.1016/S0031-9201(99)00007-2
Smith, P. J., and Bean, C. J. (2020). Retreat: A REal-time TREmor analysis tool for seismic arrays, with applications for volcano monitoring. Front. Earth Sci. 8, 586955. doi:10.3389/feart.2020.586955
Stammler, K. (1993). SeismicHandler—Programmable multichannel data handler for interactive and automatic processing of seismological analyses. Comput. geosciences 19 (2), 135–140. doi:10.1016/0098-3004(93)90110-Q
Steinberg, A., and Gaebler, P. (2023). Automatisch erstellter Erdbeben Katalog des Seiger Projektes. Zenodo. doi:10.5281/zenodo.7973593
Stutzmann, E., Schimmel, M., Patau, G., and Maggi, A. (2009). Global climate imprint on seismic noise. Geochem. Geophys. Geosystems 10 (11). doi:10.1029/2009GC002619
Suckale, J. (2010). Moderate-to-large seismicity induced by hydrocarbon production. Lead. Edge 29 (3), 310–319. doi:10.1190/1.3353728
Szuberla, C. A., and Olson, J. V. (2004). Uncertainties associated with parameter estimation in atmospheric infrasound arrays. J. Acoust. Soc. Am. 115 (1), 253–258. doi:10.1121/1.1635407
Takanami, T., and Kitagawa, G. (1988). A new efficient procedure for the estimation of onset times of seismic waves. J. Phys. Earth 36 (6), 267–290. doi:10.4294/jpe1952.36.267
VanDecar, J. C., and Crosson, R. S. (1990). Determination of teleseismic relative phase arrival times using multi-channel cross-correlation and least squares. Bull. Seismol. Soc. Am. 80 (1), 150–169. doi:10.1785/BSSA0800010150
Vasterling, M., Wegler, U., Becker, J., Brüstle, A., and Bischoff, M. (2017). Real-time envelope cross-correlation detector: Application to induced seismicity in the Insheim and Landau deep geothermal reservoirs. J. Seismol. 21, 193–208. doi:10.1007/s10950-016-9597-1
Velleman, P., and Welsch, R. (1981). Efficient computing of regression diagnostics. Effic. Comput. Regres. Diagnostics. Am. Statistician 35 (4), 234–242. doi:10.2307/2683296
Wald, A. (1943). Tests of statistical hypotheses concerning several parameters when the number of observations is large. Trans. Am. Math. Soc. 54 (3), 426–482. doi:10.1090/s0002-9947-1943-0012401-3
Wang, R., Schmandt, B., Zhang, M., Glasgow, M., Kiser, E., Rysanek, S., et al. (2020). Injection-induced earthquakes on complex fault zones of the Raton Basin illuminated by machine-learning phase picker and dense nodal array. Geophys. Res. Lett. 47 (14). doi:10.1029/2020GL088168
Weingarten, M., Ge, S., Godt, J. W., Bekins, B. A., and Rubinstein, J. L. (2015). High-rate injection is associated with the increase in US mid-continent seismicity. Science 348, 1336–1340. doi:10.1126/science.aab1345
Wilson, D., Leon, J., Aster, R., Ni, J., Schlue, J., Grand, S., et al. (2002). Broadband seismic background noise at temporary seismic stations observed on a regional scale in the southwestern United States. Bull. Seismol. Soc. Am. 92 (8), 3335–3342. doi:10.1785/0120010234
Withers, M., Aster, R., Young, C., Beiriger, J., Harris, M., Moore, S., et al. (1998). A comparison of select trigger algorithms for automated global seismic phase and event detection. Bull. Seismol. Soc. Am. 88 (1), 95–106. doi:10.1785/BSSA0880010095
Yao, Y. C. (1988). Estimating the number of change-points via Schwarz'criterion. Statistics Probab. Lett. 6 (3), 181–189. doi:10.1016/0167-7152(88)90118-6
Zang, A., Oye, V., Jousset, P., Deichmann, N., Gritto, R., McGarr, A., et al. (2014). Analysis of induced seismicity in geothermal reservoirs – an overview. Geothermics 52, 6–21. doi:10.1016/j.geothermics.2014.06.005
Keywords: seismic arrays, induced seismicity, geothermal energy, epicentral localization, robust processing
Citation: Hering P, Lindenfeld M and Rümpker G (2023) Automatized localization of induced geothermal seismicity using robust time-domain array processing. Front. Earth Sci. 11:1217587. doi: 10.3389/feart.2023.1217587
Received: 05 May 2023; Accepted: 22 June 2023;
Published: 06 July 2023.
Edited by:
Luca De Siena, Johannes Gutenberg University Mainz, GermanyReviewed by:
Vladimir Tcheverda, Institute of Petroleum Geology and Geophysics (RAS), RussiaKatrin Hannemann, University of Münster, Germany
Ferdinando Napolitano, University of Salerno, Italy
Copyright © 2023 Hering, Lindenfeld and Rümpker. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Philip Hering, phhering@geophysik.uni-frankfurt.de