Energy-efficient mobile node localization using CVA technology and SAI algorithm
 Boliang Zhang
Boliang Zhang Lu Shen
Lu Shen  Su-Kit Tang
Su-Kit Tang- Faculty of Applied Sciences, Macao Polytechnic University, Macau, Macao SAR, China
In the evolving landscape of the Internet of Things (IoT), Mobile Wireless Sensor Networks (MWSN) play a pivotal role, particularly in dynamic environments requiring mobile sensing capabilities. A primary challenge in MWSNs is achieving accurate node positioning with minimal energy consumption, as these networks often consist of battery-powered, mobile sensors where energy replenishment is difficult. This paper addresses the critical problem of energy-efficient node localization in MWSNs. We propose a novel positioning approach leveraging Cooperative Virtual Array (CVA) technology, which strategically utilizes the mobility of nodes to enhance positioning accuracy while conservatively using energy resources. The methodology revolves around optimizing the number of transceiver nodes, considering factors such as node moving speed, total energy consumption, and positioning errors. Central to our approach is the Signal Arrival and Interaction (SAI) algorithm, an innovative technique devised for efficient and precise mobile node localization, replacing traditional Time of Arrival (ToA) methods. Our simulations, conducted under various scenarios, demonstrate the significant advantages of the CVA-based positioning algorithm. Results show a marked reduction in energy consumption and robust performance in mobile node scenarios. Key findings include substantial improvements in localization accuracy and energy efficiency, highlighting the potential of our approach in enhancing the operational sustainability of MWSNs. The implications of this research are far-reaching for IoT applications, particularly those involving mobile sensors, such as in smart cities, industrial monitoring, and disaster management. By introducing a novel, energy-efficient positioning method, our work contributes to the advancement of MWSN technology, offering a sustainable solution to the challenge of mobile node localization.
1 Introduction
With the continuous development of the Internet of Things (IoT), wireless network-based IoT systems are becoming larger and more complex, as well as increasing the tasks of the network. At present, the IoT has been successfully applied in the fields of Industry 4.0, personal health monitoring, smart homes, smart cities, smart agriculture, military intelligence, disaster relief, etc. (Onasanya et al., 2019; Zhu et al., 2022; Tse et al., 2020). Access to Wireless Sensor Networks (WSN) provides environmental information perception and interaction for various applications of IoT, especially the mobility of Mobile Wireless Sensor Networks (MWSN) further enriches the IoT applications (Gautam et al., 2019; Yan et al., 2019; Menaka and Gauni, 2022). Considering an IoT system with a huge number of wireless nodes and various types of subnetworks, the same management node performs different management policies for different types of mobile nodes, which results in a complex system with mixed functions. As nodes move to a network with different functions, the working status changes accordingly. Those changes are highly dependent on reliable communication, especially for measurement and control networks with real-time requirements, which require a reasonable resource allocation scheme to ensure real-time communication. In addition, reducing power consumption is always a crucial problem to lower the frequency of change battery power for mobile nodes. Therefore, how to reasonably allocate the available resources to ensure reliable communication when the working status of each wireless node device changes and to achieve an optimal balance between network functions and device power consumption has become an urgent problem to be solved (Reddy and Satyanarayana, 2017).
One of the main applications of WSN is positionings, such as precision navigation and target detection are some practical instances of WSN-based positioning. The Matched Filter (MF) estimator is a well-known technique in signal processing, used for maximizing the signal-to-noise ratio (SNR) in the presence of noise. Its application in the domain of MWSN is critical for enhancing the accuracy of signal detection, particularly in environments with high ambient noise levels. Similarly, the Energy Detector (ED) is another fundamental tool in signal processing, particularly valuable in scenarios where signal properties (like phase or amplitude) are unknown or change rapidly. In MWSNs, ED is instrumental for rapid signal detection, contributing to the efficiency and responsiveness of the network. These estimators are particularly relevant to our study as they form the basis for the development of advanced positioning algorithms in MWSNs, laying the groundwork for our proposed CVA-MIMO based positioning approach. In WSN, knowledge of the positions of adjacent and non-adjacent nodes is beneficial to select the optimal route for information exchange. In addition, precise positioning can speed up information exchange and reduce the energy consumption of nodes, which is a prerequisite for nodes to conduct network tasks (Devi and Sethukkarasi, 2016). Due to the mobility of positioning nodes in WSN, the typical positioning methods consist of two main categories of the statistical-based scheme and the non-statistical scheme (Benslimane et al., 2014). Statistical-based positioning algorithms refer to Monte Carlo positioning algorithms, and there are already a large number of algorithms on Monte Carlo positioning algorithms and their improvements (Chen et al., 2020; Song et al., 2021). Monte Carlo positioning algorithms can be divided into four steps: prediction, filtering, resampling, and positioning. The improved algorithms are aimed at the prediction and filtering phases, where the interpolation is used in the prediction phase to predict the speed and direction of the node’s movement, while the conditions for filtering are set based on network connectivity in the filtering phase. In the research of Zhu and Ren (2020), the serialized Monte Carlo method was proposed for the problem of mobile sensor network node positioning, which was the earliest algorithm without ranging for mobile sensor nodes. Then the Monte Carle Boxed Localization algorithm was proposed in Zhang (2022), which adopted the Bounding Box technique. The core idea of this technique is to use a rectangular area to represent the sampling area. Therefore, the area of the sampling area can be reduced, and the efficiency of positioning sampling can be improved.
Driven by the requirements of cost and application scenarios, the application scenarios of WSNs are gradually expanding to more complex environments, such as underwater and forests (Sunitha and Karunavathi, 2019). Generally, the positioning algorithms for WSNs are classified into Range-Free positioning schemes and Range-Based positioning schemes according to whether measurement information is required. Range-Free means that during the positioning process, sensor nodes without measure distance information, and the location information is mainly calculated based on the topology of WSNs and the data communication mechanism between nodes. The centroid algorithm (Bulusu et al., 2000), the Approximate Point-in-triangulation Test algorithm (APIT) (He et al., 2003), and the DV-Hop algorithm (Niculescu and Nath 2001) are typical Range-Free positioning schemes. The centroid algorithm (Bulusu et al., 2000) determines the centroid of the polygon formed by the reference nodes around the target node based on the connectivity of the network and takes it as the position of the target node. The APIT algorithm (He et al., 2003) determines the position of the target node by estimating the centroids within the intersection of the triangles, which are formed according to the reference node. The DV-Hop algorithm was proposed in Niculescu and Nath (2001). Firstly, it calculates the minimum number of hops and the average distance per hop between the unknown node and the beacon node and then uses the product of the number of hops and the distance to estimate the distance between the unknown node and the beacon node. Finally, the estimated position of the target node is calculated using the maximum likelihood method or the trilateration method. The hardware cost of the Range-Free positioning schemes is relatively low. However, it is easily affected by the sensor network topology and network node density, and thus the positioning accuracy is usually not high. In the recent study, the authors proposed a new enhanced DV-Hop scheme to address the shortcomings of the original DV-Hop scheme which suffers from low localization accuracy and stability (Chen et al., 2022). The proposed random sample-based consensus algorithm can select more reliable beacon nodes to calculate the coordinates. The authors of Wang et al. (2022) developed two types of localizers for collaborative localization of WSNs with known and unknown orientation angles from the perspective of Bayesian inference and convex optimization.
As for the Range-Based positioning scheme, it means that sensor nodes are equipped with measuring devices that enable the combination of measurement data, communication information, and topology of the sensor nodes for more accurate positioning. According to the measurement approaches, Range-Based positioning algorithms can be divided into distance measurement, direction (angle) measurement, and relative positioning measurement. The distance measurement measures the distance between nodes to find the geographic location in terms of the Time of Arrival (ToA), Angle of Arrival (AoA) (Zhu and Ren 2020), Time Difference of Arrival (TDOA) (Kaune, 2012), Received Signal Strength Indication (RSSI), and direction of arrival (Sunitha and Karunavathim, 2019). The DILOC algorithm proposed in Khan et al. (2009) is a typical positioning algorithm based on distance measurement information. Specifically, it calculates the centroid coordinates of nodes relative to neighbor nodes through the Cayley-Meng determinant and transforms it into a linear problem. The real position of the node is estimated by distributed iteration method. However, the DILOC algorithm requires the node to be in the convex hull of the neighbor nodes. The authors proved the non-convexity of the positioning problem based on the ToA and RSSI measurement models of signal, respectively, using the methods of second-order cone programs (Salari et al., 2017) and semidefinite programming (Salari et al., 2013) to transform the non-convex optimization problem. To sum up, the focus of the Range-Based algorithm mainly stays on distance measurement-based positioning, while most of the Range-Free positioning algorithms are based on the Monte Carlo positioning algorithm for improvement. The above-mentioned distance measurement methods exhibit a high-precision positioning capability. However, measurement errors and time synchronization are common issues in designing ToA-based approaches. It is necessary to adopt a new scheme to solve the collision and synchronization problems in the ToA method to improve the efficiency of WSNs (Jamshed et al., 2022).
Multiple-Input Multiple-Output (MIMO) technology is a common method in high-speed wireless networks. The multiplexing technique will provide diversity reception for different antennas, which will bring numerous benefits to wireless networks. The structural advantages of MIMO have been extensively studied in communication systems but have not been sufficiently investigated in positioning systems (Zhu et al., 2023). Considering the nodes’ physical size and energy constraints, it is practically impossible to implement MIMO positioning in sensor nodes. However, node cooperation can be utilized in WSNs to implement the Virtual MIMO (VMIMO) technique. In VMIMO systems, a group of sensors cooperates to send and receive data (Rafique et al., 2013), and the cooperation of several single-antenna nodes forms a VMIMO structure, which is beneficial to achieve the same advantages of the MIMO structure (Li et al., 2012). In Prajapati and Joshi (2020), the additional energy consumption of an energy-efficient cooperative node communication is proposed and discussed. The results showed that VMIMO technology could address the problems of energy usage efficiency and latency. In previous studies, the VMIMO technique reduced energy consumption (Singh and Amin 2020; Prajapati and Joshi, 2021; Niu et al., 2022), but its impact on distance errors between mobile nodes was ignored. Therefore, in this paper, the Cooperative Virtual Array MIMO (CVA-MIMO) technology is proposed to realize the positioning of nodes and reduce the energy consumption of MWSN in IoT environments. The CVA algorithm synchronises the clocks by selecting the main node as the time reference. Alternatively, virtual array technology is used to exchange time information with each other to exchange time information with each other and to perform clock calibration. For collision problems, CVA algorithm shares information about communication resources, such as channel status, transmission time, etc. Through collaborative virtual array technology. Based on this information, nodes can perform collision detection, avoidance and retransmission, select the appropriate transmission time and frequency, and avoid conflicts with other nodes’ data transmission. Moreover, the proposed CVA algorithm exhibits strong robustness in the case of node movement. In general, the main idea of this work is the use of CVA technology instead of VMIMO and the introduction of the Signal Arrival and Interaction (SAI) algorithm for mobile node localization, replacing the ToA algorithm. This offers a new perspective and a unique approach to the problem, as requested. The main contributions can be summarized as:
• We have developed and implemented CVA technology specifically tailored for Mobile Wireless Sensor Networks in IoT environments. This approach is novel in the way it leverages node cooperation for positioning, which is a significant departure from traditional methods used in MWSNs.
• We propose the SAI algorithm, a new method for efficient and accurate localization of mobile nodes. This algorithm is unique in its ability to adapt to the dynamic nature of MWSNs, providing reliable localization even in challenging conditions.
• A key innovation in our research is the focus on minimizing energy consumption without compromising on positioning accuracy. We have comprehensively calculated the optimal number of transceiver nodes, considering factors like node moving speed and total energy consumption, which is a novel approach in this field.
• Our proposed method demonstrates significant advantages in energy consumption reduction and robust performance, particularly in scenarios involving mobile nodes. This aspect of our work is particularly innovative, as it addresses a common challenge in MWSN deployment.
The structure of this paper is as follows. Section 2 describes the system model. The proposed method is provided in Section 3. Simulation results are provided in Section 4 and finally conclusions are drawn in Section 5.
2 System model
In this part, we illustrate an updated CVA-MIMO based ranging model as shown in Figure 1. The suggested framework presumes that linked nodes possess centroids within a unified cluster, with the objective of uncovering the two-dimensional position of the center of mass. We postulate that the greatest delay between a pair of nodes inside the cluster falls short of the calculated duration. Taking into account NR and NT as the counts of the receiver (R) and transmitter (T) nodes, correspondingly, the centroids OT and OR symbolize the polar coordinates of TXn and RXm. Here, m and n signify the quantities of receivers and transmitters.
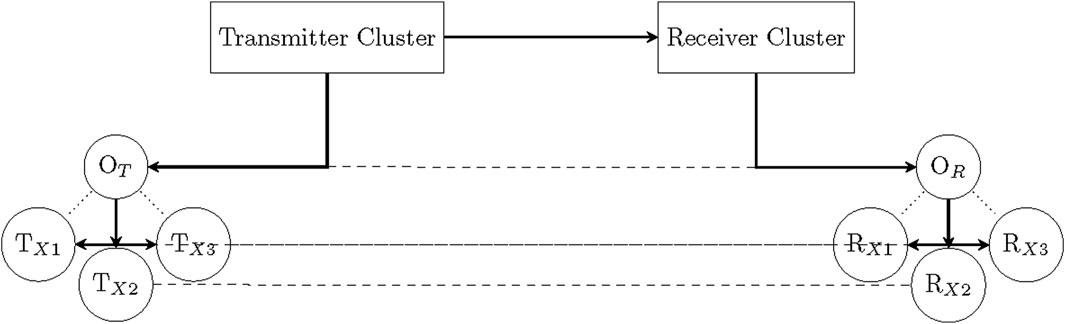
Figure 1. System model for CVA-MIMO based ranging in MWSN.
Figure 2 shows the details of the near-optimal algorithm for ToA estimation. The SAI algorithm is a crucial technique for improving localization accuracy and energy efficiency in MWSNs. The algorithm is primarily employed to estimate the ToA of signals transmitted between nodes. The ToA plays a significant role in determining the distance between nodes and localizing them accurately. The basic idea of ToA estimation is to measure the propagation time of the signal from the transmitter to the receiver. This can be achieved by comparing the time delay between the transmitted and received signals. By aligning the received signal with a replica of the expected signal, the MF estimator effectively improves the detection of the signal’s arrival time, which is a critical factor in accurate node localization. Furthermore, we explore the application of the ED in our system model, emphasizing its utility in scenarios where quick and efficient signal detection is required. The ED’s ability to detect the presence of a signal based solely on its energy makes it an indispensable tool in our positioning algorithm, especially in dynamically changing environments typical of MWSNs. By incorporating these estimators into our system model, we aim to achieve a balance between accuracy, speed, and energy efficiency in node localization—the core objective of our research. In a CVA-MIMO system, multiple receivers work together to form a virtual array to enhance signal reception and detection performance. ToA estimation starts by sampling the received signal. Each receiver in the MIMO system samples the received signal. These pre-processed sampled data are then used for subsequent ToA estimation and to evaluate the propagation model. The channel coefficients and delay calculations between the receivers then help to estimate the signal propagation time. Finally, by comparing the differences in delay between the received signals, an estimate of the signal propagation time can be obtained. The following is a detailed description of the SAI algorithm’s process:
(1) Initialization: The algorithm starts with the initialization of the network parameters, such as the positions of the nodes, transmission power, and network topology. In this stage, the nodes exchange their initial information, such as node IDs and location estimates.
(2) Signal Transmission: Transmitter nodes send signals to the receiver nodes in the network. These signals can be in the form of Radio Frequency (RF) or acoustic waves, depending on the application and environment.
(3) Signal Reception and Processing: The receiver nodes capture the incoming signals and process them to extract useful information. This includes filtering, amplification, and detection of signal characteristics such as amplitude, phase, and frequency.
(4) ToA Estimation: The ToA is estimated by measuring the time taken for the signal to travel from the transmitter to the receiver node. The ToA is a critical parameter, as it directly influences the accuracy of distance estimation between nodes. Accurate ToA estimation is essential for achieving high localization accuracy.
(5) Distance Calculation: Based on the estimated ToA, the distance between the transmitter and receiver nodes is calculated using the speed of light or sound, depending on the type of signal used. This distance information is then utilized for localization purposes.
(6) Localization: The estimated distances between nodes are used to update the position estimates of the nodes. Various localization algorithms, such as trilateration or multilateration, can be employed to determine the nodes’ positions in the network.
(7) Iterative Refinement: The SAI algorithm iteratively refines the position estimates of the nodes based on the newly calculated distances and localization results. This iterative process helps improve localization accuracy and converges to the optimal solution.
(8) Network Adaptation: MWSN is a mobile communication network that combines WSN and mobile communication technologies designed to enable the monitoring, tracking and communication of moving targets. MWSN builds a dynamic, self-organising network using wireless connections between sensor nodes, mobile nodes and the communication infrastructure. MWSN’s sensor nodes typically consist of sensors, processors, memory and communication modules that sense various parameters in the environment, such as temperature, humidity, pressure, etc.
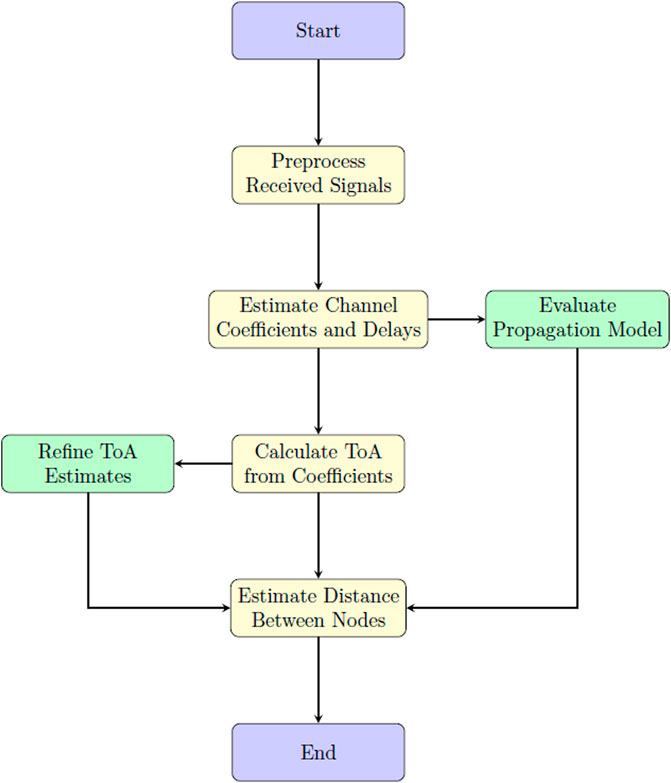
Figure 2. The near-optimal algorithm for ToA estimation.
As the nodes in a MWSN are mobile, the network topology may change over time. Mobile nodes can perform various tasks such as collecting data, maintaining the network topology, coordinating communications and transmitting data. Mobile nodes can communicate with sensor nodes and other mobile nodes via wireless communication technologies (e.g., cellular networks, Wi-Fi, Bluetooth, etc.) The SAI algorithm adapts to these changes by constantly updating node locations and network parameters to ensure accurate positioning in dynamic environments.
Specifically, in this design, the delay between the shaped centers, represents the total number of delays between two moving nodes, as shown in the following equation.
Here, τ denotes the time delay, it is important to clarify that this represents the time taken by the signal to travel from one point to another, measured in seconds (s). C denotes the speed of light. However, for the purposes of calculating distances in mobile wireless sensor networks, this time delay is converted into a spatial distance. This conversion is achieved by multiplying the time delay τ by the speed of light, thereby converting the time delay into a measure of distance in meters. This approach aligns with standard practices in signal propagation modeling, especially in localization techniques such as ToA and TDOA where understanding the distance between nodes is crucial. τcons is the constant delay component, which includes the inherent propagation delay in the communication medium and any fixed delays introduced by the hardware or system architecture, and C stands for the speed of light.
The relative velocity Ve of the transmitter after reducing the receiver’s velocity to 0, which can be expressed as
where Vt and Vr denote the transmitter velocity and receiver velocity in the Mobile to Mobile (M2M) condition, respectively. α means the angle between the Vt and Vr. The Line-of-Sight (LoS) components of the M2M OT and OR are denoted as (Yi et al., 2021; Talha and Paetzold, 2011):
where HmnNLoS denotes the Non-LoS components of the M2M OT and OR, k signifies the proportion of specularly reflected power to scattered power. Based on the suggested framework, the LoS is equivalent to.
where wc denotes angular frequency.
In this paper, the designed packet structure and modulation are according to the 802.15.4a standard bandpass pulses. Moreover, considering the specific requirements of MWSNs, including the need for energy efficiency, simplicity, and robustness, the Binary Phase Shift Keying (BPSK) modulation format is used in our design, which has a 250 kbit/s Direct Sequence Spread Spectrum (DSSS) (Dardari et al., 2011).
3 Proposed method
3.1 CVA-based positioning with SAI algorithm
In this part, we propose a novel node positioning method using CVA technology. This method employs the Cramer-Rao Bound (CRB) as an evaluation algorithm and as a practical benchmark for measuring the performance of techniques and estimators. CRB provides a practical approach for analyzing localization accuracy in collaborative networks (Li et al., 2021; Larsson, 2004).
We will comprehensively calculate the optimal number of transceiver nodes, considering node moving speed, total energy consumption, and positioning errors to minimize energy consumption during positioning. To achieve efficient mobile node localization, we will introduce the SAI algorithm. According to CRB’s theory (Li et al., 2021; Larsson, 2004), the ToA can be estimated as:
The κ(τ) equation is as follows:
In the derivation of κ(τ), as shown in the equation, the term N0 denotes the noise power spectral density, which is a measure of the power distributed per unit of frequency, expressed in watts per hertz (W/Hz). This term is essential for evaluating the estimator’s variance since it quantifies the amount of noise present in the communication channel, affecting the accuracy of timing-related measurements such as the ToA. Here, EV signifies the received energy, while ρ represents the Signal-to-Noise Ratio (SNR). The parameter β2 denotes the signal spectrum at the second moment. In addition, the CRB κ(τ) is computed using the data model depicted in Figure 3.
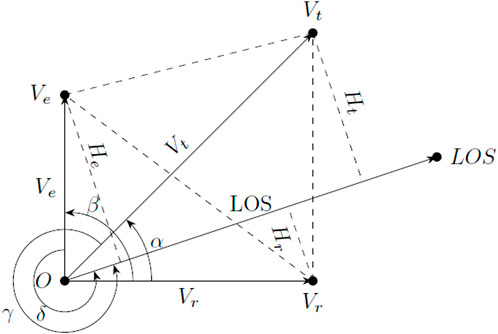
Figure 3. Data transmission model.
The (7), (8), and (9) explicitly demonstrate that the delay error of the transceiver can be diminished based on the quantity of transmitters and receivers participating in the actual communication environments. Therefore, the delay error is determined using the CRB when the receivers and transmitters are in a mobile state.
In the (10), θ′ is the angle between LOS component and Ve,
(1) Input Data Collection: The SAI algorithm starts by collecting input data, which includes vehicle position, speed, and direction. The onboard sensors and communication systems continuously monitor and gather this crucial information for processing and decision-making.
(2) Access Request: As the vehicle approaches the intersection, the algorithm sends a request for access to the SAI system. The request contains essential information such as the vehicle’s current position, speed, intended route, and the estimated time of arrival at the intersection. The term intersection refers to a specific point or area where multiple paths in a wireless sensor network converge or cross. In the context of mobile node localization, this intersection can be understood as a virtual or physical junction within the network where the paths of mobile nodes intersect or meet. This could be a point where data from various nodes are collected, processed, or where nodes need to coordinate their movements or communication. The SAI algorithm specifically addresses the requirements for efficient data handling and decision-making as vehicles or mobile nodes approach these critical points in the network.
(3) Intersection Access Evaluation: The SAI system evaluates the incoming access request and analyzes the current traffic situation at the intersection. It takes into account various factors, including vehicle type, traffic conditions, and safety considerations, to determine the optimal time for the vehicle to enter the intersection.
(4) Access Granting and Confirmation: Once an appropriate time slot is identified, the SAI system grants access to the requesting vehicle and sends a confirmation message. This message contains the assigned time and any additional instructions necessary for safe intersection traversal.
(5) Vehicle Intersection Entry: The vehicle proceeds to enter the intersection according to the assigned time and instructions received from the SAI system. During this phase, the vehicle’s onboard systems continuously communicate with the SAI system to ensure smooth coordination with other vehicles.
(6) Real-time Monitoring and Adjustment: The SAI system constantly monitors the intersection and adapts to real-time traffic conditions. If necessary, it makes adjustments to the vehicle’s assigned time or trajectory to maintain overall traffic efficiency and safety.
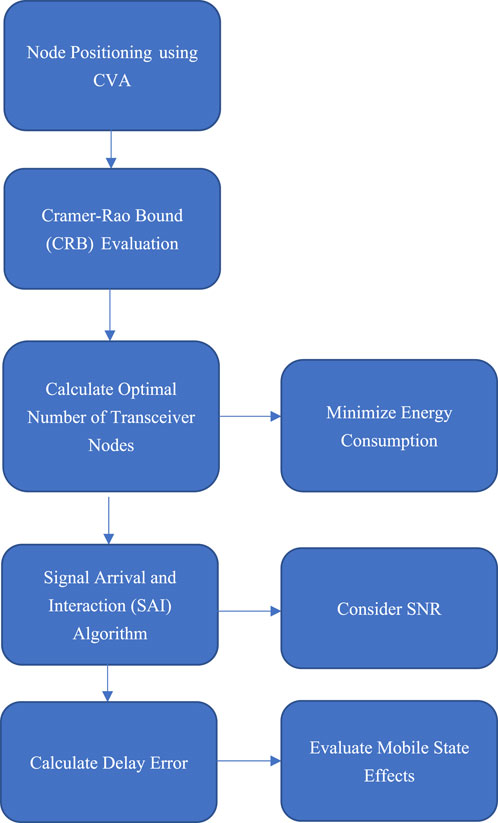
Figure 4. System model for CVA-MIMO based ranging in MWSN.
By following the SAI algorithm depicted in Figure 4, a seamless and efficient flow of traffic at intersections is achieved. This method reduces delays, minimizes the need for human intervention, and improves overall traffic management and road safety.
3.2 Energy consumption analysis
To assess the benefits of the CVA-based positioning algorithm concerning energy consumption, we have examined the energy consumption in the mobile CVA-MIMO systems. The overall energy consumption encompasses the energy usage of all power amplifiers and all other circuit modules (Zhang et al., 2011). We will compute these energy consumption components in detail and devise an energy consumption model for the entire network.
In the energy consumption analysis of the CVA-based positioning algorithm (Hosseini et al., 2013), two primary factors contribute to the total energy consumption: the energy consumed during the positioning process (EPA) and the energy consumed by the circuitry (Ecircuit). They are described as follows:
(1) EPA: This energy is mainly consumed when the nodes transmit and receive signals for positioning purposes. It includes the energy expended during signal transmission, signal reception, and processing of the received signals for localization. EPA depends on factors such as transmission power, the distance between nodes, and signal attenuation in the environment.
(2) Ecircuit: This energy accounts for the power consumption of the electronic components in the nodes, such as microcontrollers, sensors, amplifiers, and other supporting circuitry. Ecircuit is typically associated with the power consumed during the operation of these components, including their active, idle, and sleep states.
(3) The total energy consumption in a CVA-based positioning algorithm can be estimated by combining these two components, EPA and Ecircuit, to provide a comprehensive understanding of the energy efficiency of the algorithm. Optimizing the energy consumption of both the positioning process and the circuitry makes it possible to enhance the energy efficiency of the CVA-based positioning algorithm and improve the overall performance of mobile wireless sensor networks. Therefore, the total energy consumption for CVA-MIMO can be calculated as:
In this study, we intend to locate highly efficient and precise mobile sensors. After that, we propose estimating the proposed model’s energy consumption. Initially, the 1-bit concept is introduced, followed by the power consumption model for the entire network is proposed. Based on the reference (Singh and Amin, 2020), the total transmission energy consumption is made up of two parts: the consumed energy by all power amplifiers (denoted as PPA) and other circuit modules (denoted as PC). Therefore, the transmission energy Ebt for 1 bit is calculated by Jie et al. (2011); Fang et al. (2021):
where Rb represents the bit rate and PC denotes the other energy consumption components can be expressed as follows:
where PCT symbolizes the power consumption of the transmitter; PCR refers to the power consumption of the receiver; Pmix is the power consumption of the mixer amplifier; PDAC represent power consumption of the Digital-to-Analog Converter (DAC); PIFA, PLNA, Pfilt, Psyn, and PADC denote the power consumption of the Intermediate Frequency Amplifier (IFA), Low-Noise Amplifier (LNA), active filters in the transmitter and receiver, frequency synthesizer amplifier and Analog-to-Digital Conversion (ADC), respectively. Moreover, the consumed power by the power amplifier, namely, PPA can be calculated by:
where γ denotes the drain efficiency of the radio frequency power amplifier. Pout can be written as:
where Eb denotes the amount of energy required per bit at the receiver for a certain Bit Error Rate (BER), d is the distance of transmission, k denotes the path loss factor, Gt and Gr are the antenna gains for the transmitter and receiver, respectively, λ stands for the carrier wavelength, Ml means the link margin, and Nf represents the noise factor of the receiver. Hereafter, the average BER in the MIMO system can be calculated by Singh and Amin (2020):
where μ is key in determining the BER for our system. The BER is pivotal as it affects the system’s efficiency, a lower BER reduces the need for re-transmissions, thereby conserving energy. b is the cluster size, and for BPSK, b is equal to 1. Building on this, the total energy consumption for CVA-MIMO (where N is the number of bits) is as follows:
where
3.3 Relationship between measurement error and energy
The enhanced precision of distance measurement between MWSN nodes inevitably leads to higher energy consumption. As a result, there exists a balance between the estimated distance and power usage. The CVA-MIMO approach minimizes the error in distance estimation between nodes while simultaneously conserving energy. When collaborative transmitting nodes employ Space-Time Block Code (STBC) for data transmission, the receiver can achieve performance comparable to that of the Maximal Ratio Combining (MRC) scheme. Utilizing findings from fundamental digital communication, the conditional BER for a specific channel factor h can be demonstrated as follows:
To visualize the diversity order (L), we adopt the upper bound of the Q function (Proakis and Salehi, 2008), which is shown in (20):
Combining (19) and (20), we can obtain
where le denotes the effective number of independent channels or paths utilized in MRC, which represents the diversity gain in the communication system and directly influences the error performance by improving the SNR. (19) to (21) delve deeper into the BER’s dependency on channel conditions and diversity order. The diversity order directly impacts the reliability of communication, thus influencing the energy efficiency of the system.
The energy consumption of CVA-MIMO is derived as shown in (22) and (23):
Therefore,
According to the above formulas, the M2M CVA-MIMO energy consumption can be calculated as follows:
where N0 denotes the noise power spectral density, which measures the power of noise per unit bandwidth in a communication system, while C0 represents a constant that characterizes the channel capacity or another system specific parameter, dependent on the context in which it is defined. (22) to (25) collectively form a comprehensive formula for the energy consumption of the CVA-MIMO system. They take into account the number of transceivers, node movement speed, and transmission distance, which are critical factors in the energy dynamics of MWSNs.
4 Simulation results
In this section, we showcase the results and analysis of the simulations. Table 1 presents the system parameters employed in the simulation. MATLAB-based Monte Carlo simulations were executed to validate the proposed approach’s effectiveness. Furthermore, the IEEE standard Physical layer (PHY) specification 802.15.4a, an enhanced version of IEEE 802.15.4 featuring an alternative Ultra-Wide Band (UWB)-based PHY, was incorporated in our analysis. This offered data communication and high-precision location capabilities with ultra-low complexity at low data rates and minimal power consumption for the network. The channel noise between the transmitter and receiver comprises additive white Gaussian noise. Simulation results were averaged over 4,000 Monte Carlo trials with 50 randomly configured nodes.
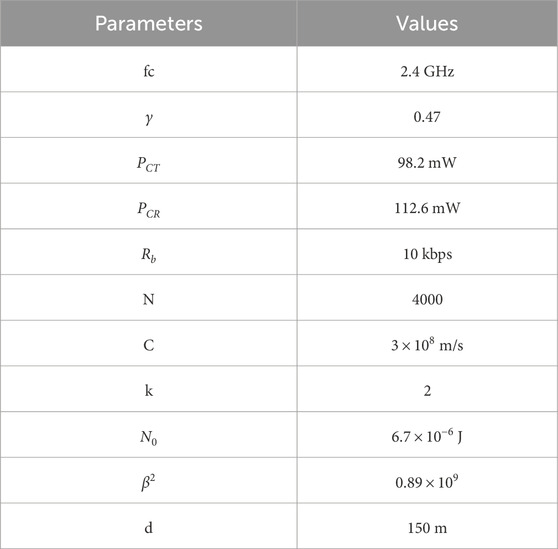
Table 1. System parameters.
4.1 Effect of the measurement accuracy of the distance between nodes
In Section 2, the ToA performance is evaluated for the CVA technique. Simulation results indicate that at a low SNR range, the performance can be enhanced by boosting the number of receivers, which significantly reduces the delay error.
Figure 5 illustrates the ToA normalized error against SNR for the proposed method in various systems (NR = 1 to NR = 4). It is clear that the ToA normalized error of different systems decreases with increasing SNR and eventually converges to a saturated state. As the number of antennas increases, the ToA normalized error also decreases. Our findings suggest that the Single-Input Single-Output (SISO) system cannot achieve the accuracy provided by the proposed ToA approach. For SISO system (NR = NT = 1), the minimum acceptable response for SNR is −3 dB, whereas for NR = NT = 2, an effective response is obtained at a minimum value of SNR equal to −12 dB. For NR = NT = 4, the value increases to SNR = −17 dB. Therefore, when there are four nodes in the cluster, the total number of nodes used can be increased by raising the noise, and some nodes can be deactivated by decreasing the noise. The maximum number of sensors employed in the cluster is chosen based on the most challenging environmental conditions. Apart from errors and environmental factors, energy consumption must also be considered, which is discussed in detail in Section 2.
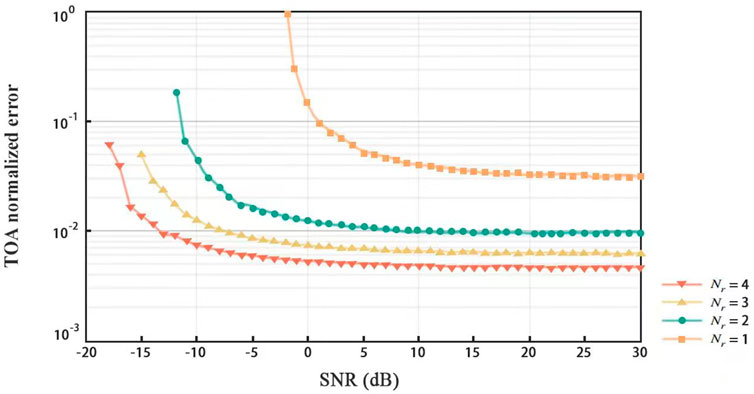
Figure 5. Comparison of ToA normalized errors for MIMO and SISO systems.
The MF estimator implies the high-resolution solution, while the ED, means the solution with the lowest complexity. As shown in Figure 6, the CVA approach is adopted for both ED and MF methods. By applying the CVA-MIMO for both ED and MF estimators, the ToA error reduces with the increase in the number of transceiver’s nodes.
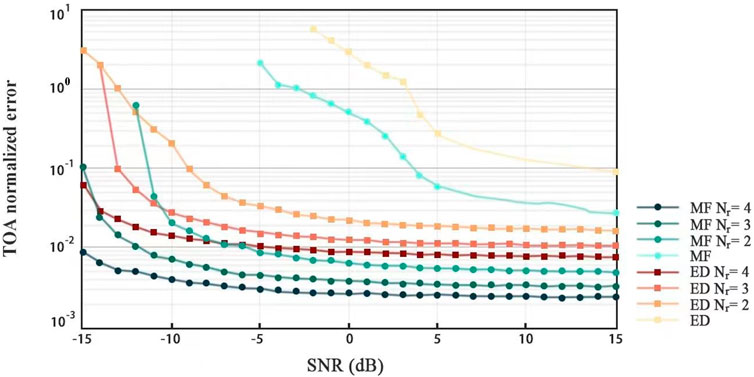
Figure 6. Effect of CVA-MIMO on the measurement error of ED and MF methods.
As illustrated in Figure 7, if the nodes are movable, the ToA error will increase proportionally with the relative speed of the nodes. In other words, small-scale fading that occurs in a very short period of time decreases the amplitude, phase, and angle of arrival of the signal. The Rayleigh distribution and the Rician distribution are primarily used to define small-scale fading. By considering the Rician channel assumption and changing the k-factor, the amount of error will be as shown in Figure 8. Figure 8 presents the experimental results depicting the relationship between the ToA normalized error and the k-factor for three different values of the number of filters used, Nf. As can be seen, the ToA error fluctuates as the k-factor varies, but these changes do not establish a consistent trend that would suggest a meaningful correlation between the ToA error and the k-factor. For instance, while an increase in Nf from 1 to 4 tends to result in a lower ToA error, the variations in error with respect to the k-factor remain largely inconsistent. This observation leads us to conclude that, within the parameters of our study, the k-factor is not a determinant factor in the accuracy of ToA error estimates.
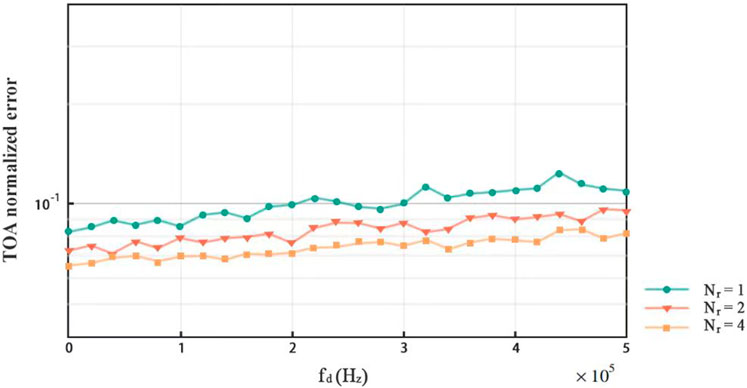
Figure 7. Error comparison of moving nodes under various receive antennas (fd means the Doppler frequency).
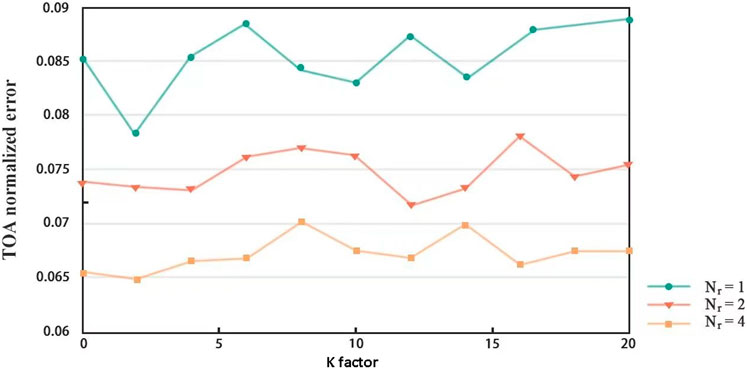
Figure 8. The relationship between the error of ToA and the k-factor.
4.2 Energy consumption and optimal number of transceivers for MWSN
Figure 9 demonstrates that the energy consumption is reduced by employing the CVA-MIMO technique when the distance of the cluster increases in a WSN. Obviously, the CVA-MIMO technique with multiple transceiver antennas can be used if higher accuracy is needed to estimate the node distances. If high accuracy is not required, a single transceiver can be utilized. Assuming NR = NT, the optimal number of transceivers is evident as the energy consumption curve changes depending on the number of transceivers.
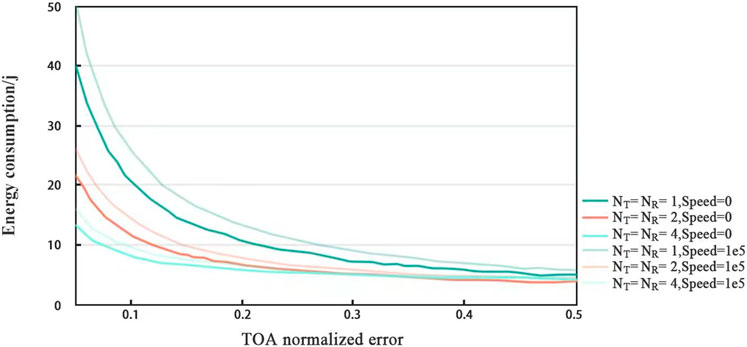
Figure 9. Energy consumption comparison for various NT and NR.
By increasing the number of NR = NT, the energy consumption of the power amplifier is reduced. In addition, the energy consumption of electronic circuits and transmitters increases. In the case of long distances, the total energy consumption can be reduced by the number of NR = NT. A smaller number of receiving antennas NR increases the energy consumption due to less diversity in signal reception. In applications where high accuracy is not required, the signal strength is reduced to decrease energy consumption. For lower amplifier power, the total energy consumption of the network becomes larger by increasing the number of NR and NT. For the same number of transceivers, increasing the speed of node reduces the ToA normalized error and increases the energy consumption. The CVA-MIMO technique, therefore, presents a significant advantage in energy efficiency and localization accuracy.
When the normalization error is between 0.05 and 0.5 and the data is received in a uniform distribution within this error range, the average energy consumption will be as shown in Table 2. EC and EMax are the average and maximum energy consumption, respectively. According to this table, the average energy consumption is reduced by 23% for NT = NR = 4 compared to NT = NR = 2.
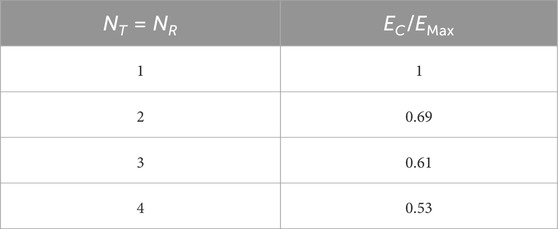
Table 2. Average energy consumption.
In Figure 10, the term normalized error on the horizontal axis represents the dimensionless ratio of the measured ToA error to a predetermined reference error value, which is the maximum ToA error expected under ideal conditions within the system. This normalization is utilized to standardize the error measurement, allowing for a direct comparison of ToA performance across different node velocities and numbers of transmitting and receiving antennas.
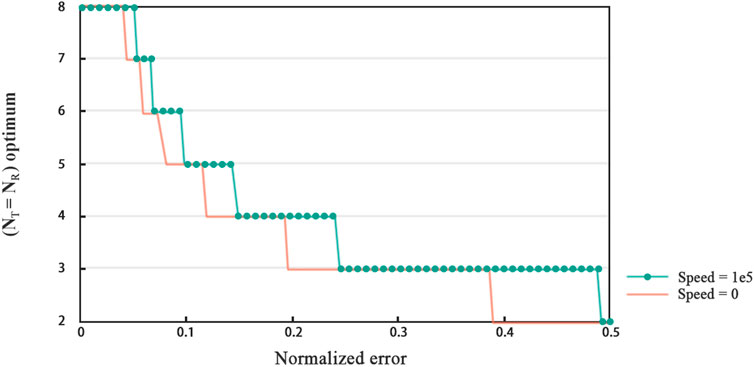
Figure 10. Optimal numbers of NR and NT under various speed.
To ensure there is no ambiguity, the normalized ToA error can be mathematically expressed as follows:
(26) adjusts the raw ToA error values to a common scale, facilitating an unbiased evaluation of the localization accuracy in diverse operational scenarios. The maximum expected ToA error serves as a benchmark for the worst-case scenario, against which all other error measurements are compared.
Assuming NR = NT, Figure 10 depicts the optimal number of transmitters and receivers. The analysis shows that the normalized ToA error decreases as the number of antennas increases, which is consistent across various node speeds. As the number of transmitters grows, energy consumption declines. When the speed is 0 and the error is 0.05, the energy consumption is 40 for NR = 1, 22 for NR = 2, and 13 for NR = 4. It is demonstrated that increasing the node speed results in a 1% energy consumption change for the delay error.
4.3 Comparison with existing algorithms
Table 3 presents a comparative analysis of the proposed CVA-MIMO positioning algorithm against three established positioning methods within the domain of MWSNs. These methods have been selected based on their relevance and common application in the field. The comparison is based on various performance criteria, including accuracy, energy consumption, robustness to node mobility, scalability, implementation complexity, adaptability to environmental changes, and latency. The proposed CVA-MIMO demonstrates superior performance in most categories, particularly in accuracy and adaptability to environmental changes, while maintaining competitive energy efficiency and lower latency. The comparison aims to highlight the strengths of the proposed approach in addressing the dynamic and resource-constrained nature of MWSNs.
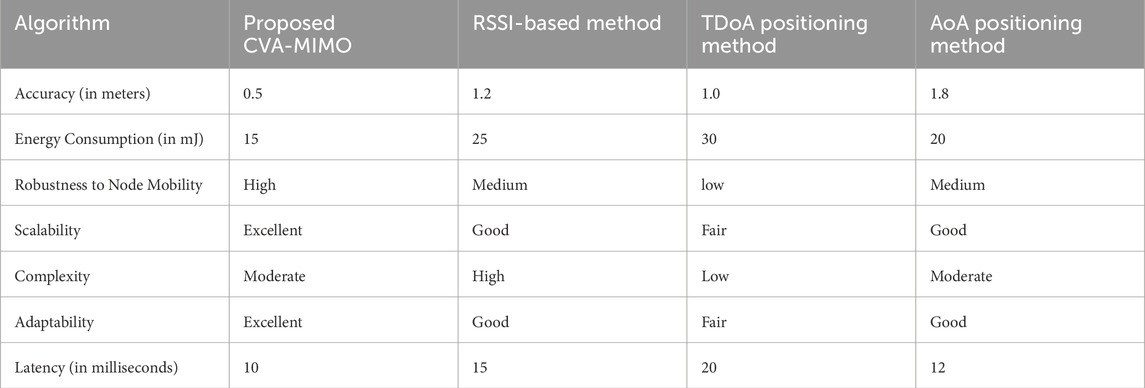
Table 3. Comparison with existing positioning algorithms.
5 Conclusion
In a typical MWSN, achieving precise localization demands substantial energy. The proposed CVA technology enables accurate localization while minimizing energy consumption. Furthermore, both the enhancement of SNR and the number of receivers can decrease the distance error and boost the nodes’ speed. By employing the proposed CVA method and the SAI algorithm, MWSN will exhibit satisfactory performance even at low SNR levels. The results demonstrate that the network’s total energy consumption is minimized, and the measurement error is reduced. Moreover, the number of transceiver antennas is optimized based on three factors: error quantity, energy consumption, and the speed of mobile nodes. As the speed of the nodes increases, error latency and energy consumption rise, which increase in energy consumption and error can be compensated by adjusting the number of transceivers. Furthermore, CVA technology reduces the power of transmitters, which consequently lessens the adverse effects of electromagnetic sensitivity on the human body.
In the future, we can use machine learning for MWSN to achieve more accurate localization and low power consumption. Specifically, machine learning algorithms such as artificial neural networks can be used to create a model that maps the received signal strength of the wireless signal to the distance between the sensor node and the objective (physical location that a sensor node is attempting to determine or estimate). Adopting multiple sensor nodes, the position of an object can be calculated via trilateration or multilateration, which is more accurate than using triangulation. In addition, machine learning algorithms can help optimize power consumption by predicting sensor node workloads and adjusting transmit power and sampling rates accordingly.
Data availability statement
The data analyzed in this study is subject to the following licenses/restrictions: The datasets presented in this article are not readily available because of the commercially sensitive data involved. Requests to access these datasets should be directed to p1807471@mpu.edu.mo.
Author contributions
BZ: Conceptualization, Methodology, Project administration, Visualization, Writing–original draft, Writing–review and editing. LS: Conceptualization, Data curation, Methodology, Writing–original draft. JY: Conceptualization, Methodology, Validation, Writing–review and editing. WL: Methodology, Project administration, Writing–review and editing. S-KT: Formal Analysis, Funding acquisition, Project administration, Writing–review and editing.
Funding
The author(s) declare no financial support was received for the research, authorship, and/or publication of this article.
Acknowledgments
This article was supported by the Research Grants (No: RP/ESCA-05/2020) offered by Macao Polytechnic University.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Abbreviations
IoT, Internet of Things; MWSN, Mobile Wireless Sensor Networks; CVA, Cooperative Virtual Array; SAI, Signal Arrival and Interaction; APIT, Approximate Point-in-triangulation Test; ToA, Time of Arrival; CVA-MIMO, Multiple-Input Multiple-Output; Cooperative Virtual Array MIMO; M2M, Mobile-to-Mobile; LoS, Line-of-Sight; CRB, Cramer-Rao Bound; MF, Matched Filter; ED, Energy Detector.
References
Benslimane, A., Saad, C., Konig, J.-C., and Boulmalf, M. (2014). Cooperative localization techniques for wireless sensor networks: free, signal and angle based techniques. Wirel. Commun. Mob. Comput. 14, 1627–1646. doi:10.1002/wcm.2303
Bulusu, N., Heidemann, J., and Estrin, D. (2000). Gps-less low-cost outdoor localization for very small devices. IEEE Personal. Commun. 7, 28–34. doi:10.1109/98.878533
Chen, D., Weng, J., Huang, F., Zhou, J., Mao, Y., and Liu, X. (2020). Heuristic Monte Carlo algorithm for unmanned ground vehicles realtime localization and mapping. IEEE Trans. Veh. Technol. 69, 10642–10655. doi:10.1109/tvt.2020.3019581
Chen, T., Hou, S., and Sun, L. (2022). An enhanced dv-hop positioning scheme based on spring model and reliable beacon node set. Comput. Netw. 209, 108926. doi:10.1016/j.comnet.2022.108926
Dardari, D., Luise, M., and Falletti, E. (2011). Satellite and terrestrial radio positioning techniques: a signal processing perspective. Academic Press.
Devi, R. R., and Sethukkarasi, R. (2016). A study on classification of energy efficient routing protocols in wireless sensor networks. Int. J. Innovative Res. Dev. 264–271. ISSN 2278–0211 5.
Fang, K., Wang, T., Zhou, X., Ren, Y., Guo, H., and Li, J. (2021). A topsis-based relocalization algorithm in wireless sensor networks. IEEE Trans. Industrial Inf. 18, 1322–1332. doi:10.1109/tii.2021.3076770
Gautam, P. R., Kumar, S., Verma, A., Rashid, T., and Kumar, A. (2019). Energy-efficient localization of sensor nodes in wsns using beacons from rotating directional antenna. IEEE Trans. Industrial Inf. 15, 5827–5836. doi:10.1109/tii.2019.2908437
He, T., Huang, C., Blum, B. M., Stankovic, J. A., and Abdelzaher, T. (2003). “Range-free localization schemes for large scale sensor networks,” in Proceedings of the 9th annual international conference on Mobile computing and networking, 81–95.
Hosseini, M., Dehghan, M., and Pedram, H. (2013). Lifetime improvement of visual sensor networks for target coverage through uniform energy consumption. Int. J. Ad Hoc Ubiquitous Comput. 14, 249–266. doi:10.1504/ijahuc.2013.058506
Jamshed, M. A., Ali, K., Abbasi, Q. H., Imran, M. A., and Ur-Rehman, M. (2022). Challenges, applications and future of wireless sensors in internet of things: a review. IEEE Sensors J. 22, 5482–5494. doi:10.1109/jsen.2022.3148128
Jie, D., Liu, D.-P., and Wu, H.-R. (2011). Energy efficiency of virtual mimo transmission schemes for cluster-based wireless sensor networks. J. china Univ. posts Telecommun. 18, 31–38. doi:10.1016/s1005-8885(10)60080-5
Kaune, R. (2012). “Accuracy studies for tdoa and toa localization,” in 2012 15th International Conference on Information Fusion, 408–415.
Khan, U. A., Kar, S., and Moura, J. M. (2009). Distributed sensor localization in random environments using minimal number of anchor nodes. IEEE Trans. Signal Process. 57, 2000–2016. doi:10.1109/tsp.2009.2014812
Larsson, E. G. (2004). Cramer-rao bound analysis of distributed positioning in sensor networks. IEEE Signal Process. Lett. 11, 334–337. doi:10.1109/lsp.2003.822899
Li, B., Wang, W., Yin, Q., Yang, R., Li, Y., and Wang, C. (2012). A new cooperative transmission metric in wireless sensor networks to minimize energy consumption per unit transmit distance. IEEE Commun. Lett. 16, 626–629. doi:10.1109/lcomm.2012.030512.112380
Li, J., Lu, I.-T., and Lu, J. (2021). Cramer-rao lower bound analysis of data fusion for fingerprinting localization in non-line-of-sight environments. IEEE Access 9, 18607–18624. doi:10.1109/access.2021.3053994
Menaka, D., and Gauni, S. (2022). An energy efficient dead reckoning localization for mobile underwater acoustic sensor networks. Sustain. Comput. Inf. Syst. 36, 100808. doi:10.1016/j.suscom.2022.100808
Niculescu, D., and Nath, B. (2001). “Ad hoc positioning system (aps),” in GLOBECOM’01. IEEE global telecommunications conference (Cat. No. 01CH37270) (IEEE), 2926–2931.
Niu, J., Yang, X., Liu, S., Li, Y., and Guo, Y. (2022). Energy-efficient adaptive virtual-mimo transmissions for lora uplink systems. Digit. Signal Process. 127, 103493. doi:10.1016/j.dsp.2022.103493
Onasanya, A., Lakkis, S., and Elshakankiri, M. (2019). Implementing iot/wsn based smart saskatchewan healthcare system. Wirel. Netw. 25, 3999–4020. doi:10.1007/s11276-018-01931-2
Prajapati, M., and Joshi, J. (2020). Cross layer design with extensive virtual mimo: fs-mup optimization model for wireless sensor network. J. High Speed Netw. 26 (4), 291–316. doi:10.3233/jhs-200645
Prajapati, M., and Joshi, J. (2021). Adaptive virtual mimo-based cross-layer design for wireless sensor networks via hybrid optimization model. Int. J. Model. Simul. Sci. Comput. 12, 2150007. doi:10.1142/s1793962321500070
Proakis, J. G., and Salehi, M. (2008). Digital communications. Boston, MA, United States: McGraw-Hill.
Rafique, Z., Seet, B.-C., and Al-Anbuky, A. (2013). Performance analysis of cooperative virtual mimo systems for wireless sensor networks. Sensors 13, 7033–7052. doi:10.3390/s130607033
Reddy, A. P., and Satyanarayana, N. (2017). Energy-efficient stable multipath routing in manet. Wirel. Netw. 23, 2083–2091. doi:10.1007/s11276-016-1220-4
Salari, S., Kim, I.-M., and Chan, F. (2017). Distributed cooperative localization for mobile wireless sensor networks. IEEE Wirel. Commun. Lett. 7, 18–21. doi:10.1109/lwc.2017.2750685
Salari, S., Shahbazpanahi, S., and Ozdemir, K. (2013). Mobility-aided wireless sensor network localization via semidefinite programming. IEEE Trans. Wirel. Commun. 12, 5966–5978. doi:10.1109/twc.2013.110813.120379
Singh, M. K., and Amin, S. I. (2020). Energy efficient wireless sensor network using optimum hops and virtual mimo technique. SN Appl. Sci. 2, 1582. doi:10.1007/s42452-020-03360-3
Song, L., Jiang, X., Wang, L., and Hu, X. (2021). Monte Carlo node localization based on improved quarte optimization. J. Sensors 2021, 1–12. doi:10.1155/2021/6670061
Sunitha, M., and Karunavathi, R. (2019). “Localization of nodes in underwater wireless sensor networks,” in 2019 4th international conference on recent trends on electronics, information, communication and technology (RTEICT) (IEEE), 820–823.
Talha, B., and Paetzold, M. (2011). Channel models for mobile-to-mobile cooperative communication systems: a state of the art review. IEEE Veh. Technol. Mag. 6, 33–43. doi:10.1109/mvt.2011.940793
Tse, R., Im, M., Tang, S.-K., Menezes, L. F., Dias, A. M. P. G., and Pau, G. (2020). Self-adaptive sensing iot platform for conserving historic buildings and collections in museums. IoTBDS, 392–398.
Wang, S., Jiang, X., and Wymeersch, H. (2022). Cooperative localization in wireless sensor networks with aoa measurements. IEEE Trans. Wirel. Commun. 21, 6760–6773. doi:10.1109/twc.2022.3152426
Yan, Z., Mukherjee, A., Yang, L., Routray, S., and Palai, G. (2019). Energy-efficient node positioning in optical wireless sensor networks. Optik 178, 461–466. doi:10.1016/j.ijleo.2018.09.186
Yi, Z., Zou, W., and Sun, X. (2021). Prior information based channel estimation for millimeter-wave massive mimo vehicular communications in 5g and beyond. Front. Inf. Technol. Electron. Eng. 22, 777–789. doi:10.1631/fitee.2000515
Zhang, J., Wu, C.-d., Zhang, Y.-z., and Ji, P. (2011). Energy-efficient adaptive dynamic sensor scheduling for target monitoring in wireless sensor networks. ETRI J. 33, 857–863. doi:10.4218/etrij.11.0111.0027
Zhang, Y. (2022). Backward particle tracking of anomalous transport in multi-dimensional aquifers. Water Resour. Res. 58, e2022WR032396. doi:10.1029/2022wr032396
Zhu, H., Huang, Z., Lam, C.-T., Wu, Q., Yang, B., and Ng, B. K. (2023). A space shift keying-based optimization scheme for secure communication in iiot. IEEE Syst. J. 17, 5261–5311. doi:10.1109/jsyst.2023.3308775
Zhu, H., Peng, Y., Xu, H., Tong, F., Jiang, X.-Q., and Mirza, M. M. (2022). Secrecy enhancement for ssk-based communications in wireless sensing systems. IEEE Sensors J. 22, 18192–18201. doi:10.1109/jsen.2022.3193638
Keywords: Internet of Things, mobile wireless sensor network, cooperative virtual array, signal arrival and interaction, positioning, energy consumption
Citation: Zhang B, Shen L, Yao J, Luo W and Tang S-K (2024) Energy-efficient mobile node localization using CVA technology and SAI algorithm. Front. Energy Res. 12:1327354. doi: 10.3389/fenrg.2024.1327354
Received: 24 October 2023; Accepted: 13 March 2024;
Published: 22 March 2024.
Edited by:
Zening Li, Taiyuan University of Technology, ChinaReviewed by:
Merhawit Teklu, Chosun University, Republic of KoreaHan Sheng, Taiyuan University of Technology, China
Copyright © 2024 Zhang, Shen, Yao, Luo and Tang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Boliang Zhang, p1807471@mpu.edu.mo; Su-Kit Tang, sktang@mpu.edu.mo