An Adaptive Time-Varying Impedance Controller for Manipulators
 Xu Liang1,2
Xu Liang1,2  Tingting Su1
Tingting Su1  Zhonghai Zhang3 Jie Zhang1 Shengda Liu2
Zhonghai Zhang3 Jie Zhang1 Shengda Liu2  Quanliang Zhao1 Junjie Yuan1 Can Huang1 Lei Zhao1 Guangping He1*
Quanliang Zhao1 Junjie Yuan1 Can Huang1 Lei Zhao1 Guangping He1*- 1Department of Mechanical and Electrical Engineering, North China University of Technology, Beijng, China
- 2State Key Laboratory of Management and Control for Complex Systems, Institute of Automation, Chinese Academy of Sciences, Beijing, China
- 3Beijing Aerospace Measurement & Control Technology Co., Ltd, Beijing, China
Aiming at the situation that the structural parameters of the general manipulators are uncertain, a time-varying impedance controller based on model reference adaptive control (MRAC) is proposed in this article. The proposed controller does not need to use acceleration-based feedback or to measure external loads and can tolerate considerable structure parameter errors. The global uniform asymptotic stability of the time-varying closed-loop system is analyzed, and a selection approach for control parameters is presented. It is demonstrated that, by using the proposed control parameter selection approach, the closed-loop system under the adaptive controller is equivalent to an existing result. The feasibility of the presented controller for the general manipulators is demonstrated by some numerical simulations.
1. Introduction
The control issues of a multi-degree-of-freedom (multi-DOF) mechanical system with force and motion task constraints are significant for many advanced practical applications, such as minimally invasive surgeries (Burgner-Kahrs et al., 2015), rehabilitation nursing (Jutinico et al., 2017; Ansari et al., 2018), in-situ inspection, and machining for the repair of aeroengine parts (Dong et al., 2017; Su et al., 2020), life rescues (McMahan et al., 2006), teleoperation based on haptic interfaces (Sharifi et al., 2016), etc. The operation tasks with force and motion constraint include force-position approximately decoupled operation tasks and more general force-position coupled operation tasks. With regard to the operation task with decoupling force and motion constraint, the closed-loop control system can be stabilized through hybrid force/motion control strategies (Yip and Camarillo, 2016). As to the task with coupling force and motion constraints, in general, an impedance controller has to be utilized to track the time-varying trajectories of the constraint task (Kronander and Billard, 2016). At present, most researches focus on the invariant impedance control of the robot system. The adjustment range of the manipulator's dynamic characteristics under the invariant impedance controller is limited, and it can only complete some rough human-machine cooperation/coordination tasks. For mechanical assembly tasks, especially for those relatively precise assembly operations, such as bearing press-mounting and quantitative fastening of screws/nuts, it is necessary to accurately control the position and pose of the end-effector in the direction of force, as well as the force/torque during the operations. Therefore, the application of invariant impedance control is relatively limited, and the time-varying impedance control has important practical application requirements in engineering tasks. Since the time-varying impedance control has extensive and important application requirements in complex systems or high-level applications such as the universal operation of industrial robots, the interactive motion of rehabilitation robots, human–machine fusion control of exoskeleton robots, telepresence teleoperation robots, etc., in recent years, scholars have conducted related research on time-varying impedance control. The time-varying impedance closed-loop system is a kind of time-varying dynamic system, and it is difficult to analyze its global or large range asymptotic stability. The integration of robotics and artificial intelligence promotes the development of controllers under time-varying operation tasks (Su et al., 2018; Wu et al., 2021a,b). The theoretical and practical research of artificial intelligence control methods based on fuzzy control, neural network and other theories have been carried out internationally for more than 30 years (Deng et al., 2021a,b; Wu et al., 2021c,e). Artificial intelligence control methods often use large-scale inference rule bases or network structures with a large number of nodes and layers in order to ensure their large-scale effectiveness. Due to their good learning ability, artificial intelligence methods are often used in the cognitive science of human–machine interaction systems (Wu et al., 2020b, 2021d).
In practical engineering applications, the control systems often encounter comprehensive characteristics such as strong non-linearity, uncertainty, and time-varying parameters (Liu et al., 2020; Liang et al., 2021b), which will affect the stability of the system. Because the accurate dynamic modeling of the robot system is rather hard, which brings difficulties to the control law design of the system and reduces the dynamic characteristics of the closed-loop system, it is difficult for the robot to achieve high-quality practical applications. Adaptive control and its improvement (Tong et al., 2020; Liu et al., 2021b), sliding mode control and its improvement (Zhai and Xu, 2021), non-linear feedback control and its improvement, observers and its improvement (Liang et al., 2021a; Li et al., 2021; Liu et al., 2021a), and other methods (Yang et al., 2021) can be used to solve this problem. In literature (Li, 2021), a novel command filter adaptive tracking controller is designed to achieve asymptotic tracking for a class of uncertain non-linear systems with time-varying parameters and uncertain disturbances by introducing a smooth function with positive integrable time-varying function to compensate the unknown time-varying parameters and uncertain disturbances. In this article, we study adaptive time-varying impedance controllers. In recent years, adaptive impedance control problems have attracted the attention of many scholars due to the wide and different application requirements (Xu et al., 2011; Jamwal et al., 2017), such as the relevant developments about haptic interfaces (Sharifi et al., 2016), upper/lower limb rehabilitation robots (Li et al., 2017; Liu et al., 2017), robotic exoskeleton systems (Hussain et al., 2013), and so on (Wu et al., 2020a; Deng et al., 2021b). At present, most research studies on adaptive impedance control are actually focused on online “impedance planning,” which means online searching for a target impedance profile for the purpose of improving the application effects of robots. The stability issues of the time-varying closed-loop systems with regard to the target impedance profile are not analyzed except few works (Ferraguti et al., 2013; Kronander and Billard, 2016). In some application-oriented research studies, experiments are always used to demonstrate the stability of the controlled plants (Hamedani et al., 2019; Pena et al., 2019; Perez-Ibarra et al., 2019). However, demonstrating the stability of an adaptive impedance control system by experiments is commonly task-depended, and different operating tasks require different experiments to verify the stability of the system. Therefore, an analysis or control method that can ensure the stability of the time-varying impedance control system is required. To this end, the literature (Kronander and Billard, 2016) and (Ferraguti et al., 2013) addressed this issue. Through an in-depth analysis of the method presented in Ferraguti et al. (2013), the literature (Kronander and Billard, 2016) presented the stability conditions for the variable damping and stiffness system, and the proposed stability conditions do not rely on the controlled plant's states. The benefit of the stability conditions is that they can be verified offline before performing a task. However, this approach has two main shortcomings: (1) accurate dynamics model of the controlled plant is needed in the controller; and (2) measurement of external loads or joint accelerations is required in the controller.
In this article, aiming at the above two problems, a globally uniform stability condition is proposed in which the variable damping and stiffness are independent of the state of the robot. As we all know, the closed-loop system under an adaptive impedance controller is actually a time-varying dynamic system, and it is also a complex non-linear system, which makes it difficult to design the controller. To be specific, the main contribution of this article is summarized as follows:
1) In this article, we use variable damping and stiffness control to adjust damping and stiffness parameters to improve compliant operation performance and use adaptive control to adjust the parameters to achieve the stability of the system when the system parameters are disturbed.
2) Under the frame of model reference adaptive control (MRAC), the rigorous canonical reduction form of the dynamics of the general robot system can be transformed into linear or special non-linear “recursive canonical form.” By using the recursive canonical expression and the design method of the time-varying impedance controller of the linear system, the analytical expression of the parameter adaptive regulation law can be obtained, and the time-varying impedance controller with parameter adaptive characteristics can be designed.
3) The time-varying impedance controller is reconstructed under the frame of MRAC, and the stability condition given in Kronander and Billard (2016) remains unchanged. Therefore, the stability condition under the adaptive control frame is still state independent, while the above two shortcomings are eliminated.
The remainder of this article is organized as follows. Section 2 presents the stability condition provided by Kronander and Billard (2016), since it does not depend on any controllers. Section 3 presents our main contributions, the time-varying impedance controller based on MRAC and a control parameter selection approach. As an example, the method is tested through an uncertain planar 2R manipulator in section 4. Section 5 gives the conclusions.
2. Existing Time-varying Impedance Controller for Manipulators
In general, the dynamic equation of the manipulators has the following form
where Θ ∈ ℜn represents the generalized coordinates of the manipulator in configuration space, M(Θ) ∈ ℜn×n represents the inertial matrix of the system, represents centrifugal and Coriolis torque vector, N(Θ) ∈ ℜn represents the gravity and elastic force vector, represents an equivalent torque caused by the external forces, while represents the actuation torque.
For time-varying impedance control issues, the closed-loop target dynamic equation of a manipulator can be given as follows
where is defined to be an error vector of the generalized coordinates and Θd denotes the desired position of the generalized coordinates, H denotes a positive definite and symmetric constant matrix, D(t) denotes a time-varying damping matrix, and K(t) denotes a time-varying stiffness matrix. Both of D(t) and K(t) are also positive definite and symmetric. Usually, K(t) should be determined by the designated operation tasks, and D(t) should be selected to ensure the global asymptotic stability at the origin of the closed-loop system (2) when the equivalent external torque satisfies τe = 0. If the equivalent external torque τe does not equal to zero, then the origin of the closed-loop system (2) should be globally stable in Lyapunov's sense. An elegant result of designing a time-varying impedance controller of the manipulator can be stated as Lemma 1, which is an adapted result that was first presented in the literature (Kronander and Billard, 2016).
Lemma 1. For the dynamic systems (1) and the target system (2), suppose the stiffness matrix K(t) is continuous, then is bounded, which means , where Ω is a positive constant. Then there exists a positive constant α and a matrix D(t) satisfying the following set of inequalities
which makes the following closed-loop system
globally uniformly asymptotically stable at the origin when τe = 0. When τe ≠ 0, then the origin is globally uniformly stable.
REMARK 1. By applying a Lyapunov candidate function with the time-varying function definition β(t) = K(t) + αD(t) − α2H, it is not hard to show that the first two inequalities in (3) are used to ensure the positive definiteness of Lyapunov function , and the last two inequalities in (3) can ensure the negative definiteness of . Furthermore, by proving the function is also a decrescent function, then the global uniform asymptotic stability of the closed-loop system (2) can be concluded. For the purpose of simplifying control parameters selection, in He et al. (2020) the authors presented a simple stability condition
where ε > 0 is a small constant and I denotes an identity matrix. Even though the damping matrix given in (5) shows certain conservatism for some applications, it is sufficient to show that the solution of the inequality group (3) exists.
REMARK 2. Note that the torque controller τa(t) in (4) uses acceleration feedbacks, and the dynamics model (1) is supposed to be accurate. In real world applications, these two points may not be easily achieved, since the acceleration sensors are not standard accessories for many manipulators and it is also rather difficult to accurately determine the dynamics parameters of a multi-DOF mechanical system. In the next section, it will be shown that these problems can be resolved by developing an MRAC based time-varying impedance controller.
3. A MRAC Based Time-varying Impedance Controller for Manipulators
For a controlled system with an adaptive controller, in general, the uniformly asymptotical stability of the closed-loop system cannot be concluded by following the same method as that provided in Remark 1. The main reason is that a parameter estimation law is also included in the closed-loop system besides a control law, such that the Lyapunov candidate function cannot be constructed as that presented in Remark 1. On the contrary, the following lemma (Slotine and Li, 1991) can be utilized to analyze the uniformly asymptotical stability of a closed-loop system with an adaptive controller.
LEMMA 2. If a scalar function V(t) has the following properties, then .
(1). V(t) is lower bounded;
(2). is negative semi-definite;
(3). is uniformly continuous in time.
Now, we derive the adaptive time-varying impedance controller. First, we define a virtual velocity error vector
where Λ ∈ ℜn×n is a symmetric and positive definite matrix, or more generally a matrix so that −Λ is Hurwitz, , and the virtual reference velocity in Equation (6) is defined as
It is well known that the dynamics of a mechanical system commonly satisfies the linearly parameterized property, that is, the left-hand side of the dynamic system (1) can be expressed as the following form
where denotes a matrix, ρ denotes an unknown parameter vector that describes the mass properties of a mechanical system. If we replace the differential variables and of the system (1) with the virtual reference velocity and its differential variable , then the linearly parameterized property does not change, and the resulted virtual dynamic system can also be expressed as a similar form
By applying the linearly parameterized form Equation (9), we can obtain the following result.
THEOREM 1. For the dynamic systems (1), by applying the following controller
and the following parameter estimator
where KD in Equation (10) is a continuous positive definite matrix, i.e., is bounded, denotes the estimation of ρ, and the matrix Γ in Equation (11) is also positive definite, then the origin of the closed-loop system
is globally uniformly asymptotically stable when the external loads τe = 0. If the external loads τe ≠ 0, the origin of the system Equation (12) is globally uniformly stable in the Lyapunov's sense.
PROOF. Let us define to be an error vector of the parameter estimates and select a Lyapunov candidate function
By using the definition of the virtual velocity error vector given by Equation (6), the time derivative of Equation (13) can be given as
Since Ṁ − 2C is a skew-symmetric matrix (Murray et al., 1994), which means that (Ṁ − 2C)T = −(Ṁ − 2C), we have
and since M is a symmetric and positive definite (Murray et al., 1994), which means that M = MT, then from Equation (15) we can get
So
By using the equation above, Equation (14) can be written as
Referring to the dynamics Equation (1), it is easy to obtain
and from (6) we can obtain
Substituting Equations (20) into (19) and then bringing Equations (19) into (18), it can be shown that
Due to and ρ is a constant for any manipulator system, we have . Therefore, Equation (21) follows that
By applying the linearly parameterized form Equation (9), Equation (22) can be expressed as
If we adopt the controller Equation (10), it is straightforward that the Equation (23) can be rewritten as
By using the parameter estimator Equation (11), which is given as , then we can obtain
since KD is positive definite. This implies V(t) ≤ V(0), and therefore, both of the vectors s and are bounded [see Equation (13)]. To observe the uniform continuity of the function , we calculate the second order differential function of V(t), and it can be written as
See definition Equation (6), it shows the vector s is smooth. On the other hand, the differential matrix is supposed to be bounded. Then we can conclude that is bounded. According to Lemma 2, we can get , which means s → 0 as t → ∞. It is obvious that ṡ is bounded.
On the surface s = 0, referring to the definition , we can conclude the origin of the closed-loop system Equation (12) is uniformly asymptotically stable since −Λ is Hurwitz. In addition, the function V(t) is unbounded, thus the stability of the closed-loop system is globally effective.
REMARK 3. Theorem 1 shows that both the control law Equation (10) and the parameter estimator (11) only use state feedback . This is helpful for improving the feasibility of the controller in real world applications. In particular, the adaptive controller does not need an accurate dynamic model, thus better robust stability of the closed-loop system Equation (12) could be expected.
REMARK 4. Even though Theorem 1 gives an adaptive controller for the dynamic system Equation (1), so far the adaptive controller is not related to the time-varying impedance control issues of the manipulators. By using the following result, we can get that the time-varying impedance control problems can be resolved under the adaptive control strategy.
THEOREM 2. If the control parameters Λ and KD of the adaptive controller Equation (10) are chosen as
where γ > 0 is a constant, then the origin of the closed-loop system Equation (12) is globally uniformly stable in Lyapunov's sense.
PROOF. By subtracting Equation (9) from Equation (1), we have
where is considered. Then, substituting the adaptive control law Equation (10) into Equation (28), we can obtain that
where is considered. Since the vector also satisfies the relationship , we can obtain
According to Equation (27), if we select Λ = γM−1 and , then Equation (30) can be written as
where
Comparing Equation (32) with Equation (5), it shows the damping matrix given by (32) satisfies the stability condition Equation (5) if we select and ε = γ. In addition, on the basis of Theorem 1, under the control law (10) and the parameter estimator Equation (11), the error vector is bounded. According to Lemma 1, the origin of the closed-loop system Equation (31) is globally uniformly asymptotically stable when . If the error vector , the origin of the system Equation (31) is globally uniformly stable in Lyapunov's sense.
REMARK 5. It is worth noting that, in Equation (2), the inertial matrix H is generally different from the inertial matrix M, so that the term is appeared in the controller Equation (4), and then an accelerated feedback or sensing the external loads τe is necessary. If we select H = M, the closed-loop system Equation (4) is given by
which is very similar to the adaptive control law based closed-loop system Equation (31). However, if the dynamics model Equation (1) is not accurate, then the error terms , , and ΔN(Θ) will appear in the closed-loop system Equation (4), as well as in the system Equation (33), so that some more complex robust controllers have to be used to overcome the effects caused by the un-modeled errors for guaranteeing the stability of the closed-loop system Equation (4). On the contrary, the adaptive control law Equation (10) has considered the un-modeled error and updated the virtual reference model in the controller Equation (10) online by using the parameter estimator Equation (11). This makes the virtual velocity vectors s and the parameters errors be bounded, and finally, the virtual velocity vectors s → 0 as t → ∞. On the surface , the stability of the state of the closed-loop system is ensured by the Hurwitz matrix −Λ. Thus, the two problems mentioned in Remark 2 can be resolved or relaxed by using the MRAC based time-varying impedance controller.
REMARK 6. It is also worth noting that, in general, the external loads τe cannot be estimated by using the linearly parameterized form Equation (9). Thus, for some accurate force tracking control tasks, the linearly parameterized form Equation (9) should be changed as
then under the control law Equation (10) and the parameter estimator Equation (11), the closed-loop system can be given as
where the control parameter selection Equation (27) is considered. Since the right side of Equation (35) is bounded under control law Equation (10) with the parameter estimator Equation (11), the origin of the system Equation (35) is still globally uniformly stable in the Lyapunov's sense. However, the error term on the right side of Equation (35) will cause certain force tracking errors. Thus, for accurate force tracking control tasks, measurement of external loads is required, and the MRAC based control law should be changed as
then the closed-loop system Equation (35) will changed to that same as Equation (31).
4. Numerical Simulations
To test the feasibility of the proposed adaptive time-varying impedance controller, a model-uncertain planar 2R manipulator is adopted as the plant. Suppose the mass of two links are m1 and m2, respectively, the inertia of two links is I1 and I2, respectively, the length of two links is L1 and L2, respectively, the distance between the mass center of links and joint axes are Lc1 and Lc2, respectively, the dynamic equation of planar 2R manipulator can be given as
where θ1 and θ2 are the joint angles of the two links, m11 = ρ1 + 2ρ3 cos θ2, m12 = ρ2 + ρ3 cos θ2, m21 = m12, m22 = ρ2, , , , and c22 = 0 with , , and ρ3 = m2L1Lc2. For the planar 2R manipulator, the linearly parameterized form Equation (34) can be expressed as
where , , , χ21 = 0, , . In the simulation, the control task is described as
and
The physical parameters of the manipulator are shown in Table 1, and the control parameters are shown in Table 2, then the response results of the closed-loop system Equation (35) are plotted in the Figures 1–5.
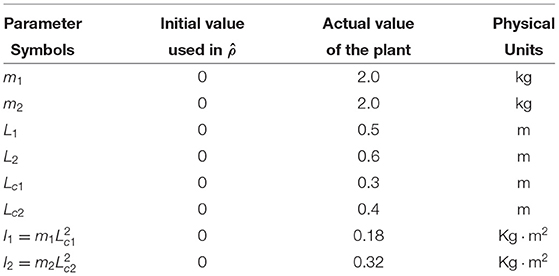
Table 1. Physical parameters of the planar 2R manipulator.
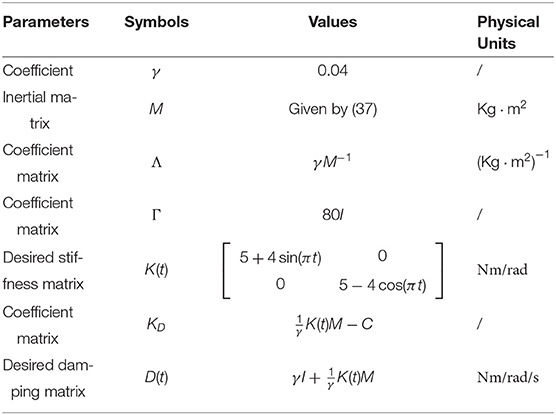
Table 2. Control parameters of the adaptive controller.
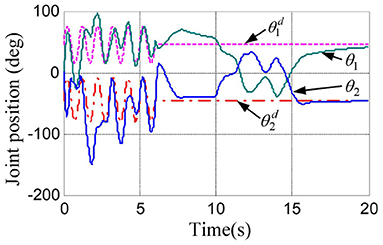
Figure 1. Responses of the joint position and their desired trajectories.
According to the numerical simulation results, even though the physical parameters of the plant are supposed to be zero at the initial moment (see Figure 3 and Table 1), it shows that system Equation (35) is uniformly stable for the controlled planar 2R manipulator. From Figures 1, 2, it can be seen that the joint trajectory tracking errors are bounded and converge to zero when the trajectory tracking task is switched to a stabilization task after the time is larger than 6s. Meanwhile, from Figure 3, it is observed that the parameter estimates are changed to constant values, and from Figure 4, one sees that the actuation torques converge to zero after the desired joint trajectories are constants. When the time is falling in the interval t ∈ (10, 14](s), there are non-zero external loads acting on the joints, and then the joint angles demonstrate large deviations (as shown in Figure 2) due to the small given closed-loop stiffness K(t) (as shown in Table 2). Since the desired joint stiffness K(t) is time-varying, the joint position deviations are varying even though the external loads τe are constant. Figure 5 shows a local enlarged drawing of the actuation torques during τe ≠ 0. It is observed that the average values of the actuation torques happen to be , since the planar 2R manipulator moves in the horizontal plane [see Equation (37) where the gravity of the manipulator is not considered here], then the actuation torques τa should balance the external loads τe. However, due to the desired time-varying stiffness K(t), the parameter estimates show certain fluctuations (such that ), then the error term shown in Equation (35) causes the actuation torques τa to show certain fluctuations. The selection of controller parameters γ and Γ affect the performance of the system. We make a performance analysis of the closed-loop control system with different parameters γ and Γ. We found that with other conditions unchanged, when Γ increases within a certain range, the root-mean-square error (RMSE) of the joint position will increase, and the peak value of the error will also increase, while the RMSE of control torque will decrease. When γ is too large or too small, the performance of the control system will deteriorate. Therefore, the state-independent property allows us to tune the controller parameters offline in advance through simulation, which lays a good foundation for ensuring the performance of the robot.
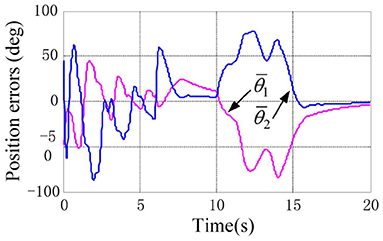
Figure 2. Responses of the joint position errors.
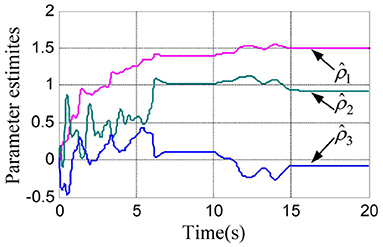
Figure 3. Trajectories of the parameter estimates.
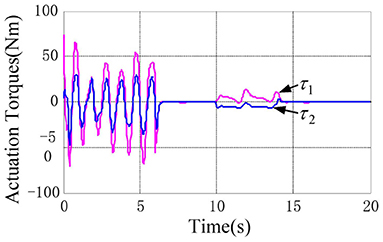
Figure 4. Actuation torques of the 2R manipulator during the control task.
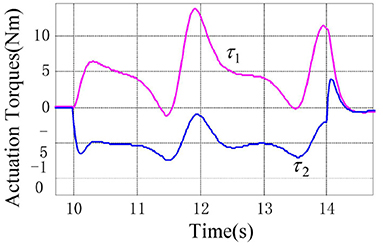
Figure 5. A local enlarged drawing of the actuation torques when the external loads are acting.
In order to verify the effectiveness of the controller proposed in this article, we also compared it with the controller in He et al. (2020). Under the same initial conditions and parameters as the proposed controller, the simulation of the comparison controller is carried out, and the response results of the closed-loop system under the comparison controller are shown in Figures 6–8. Comparing Figures 2, 7, we can get that the RMSE of the joint position under the proposed controller in Figure 2 is 0.416 and 0.494, while the RMSE of the joint position under the comparison controller in Figure 7 is 0.865 and 1.337. Then, it can be concluded that the controller proposed in this article can better realize the trajectory tracking control with higher accuracy. From the simulation results, we can also get that the proposed controller has a smaller peak error. All these simulation results verify the effectiveness of the controller proposed in this article.
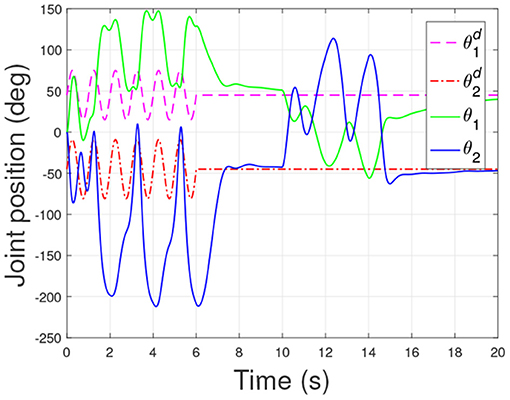
Figure 6. Responses of the joint position and their desired trajectories of the comparison method.
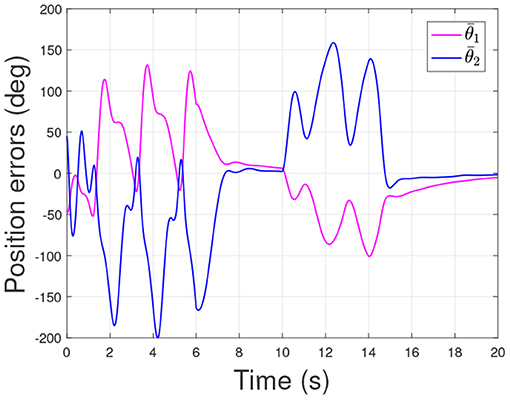
Figure 7. Responses of the joint position errors of the comparison method.
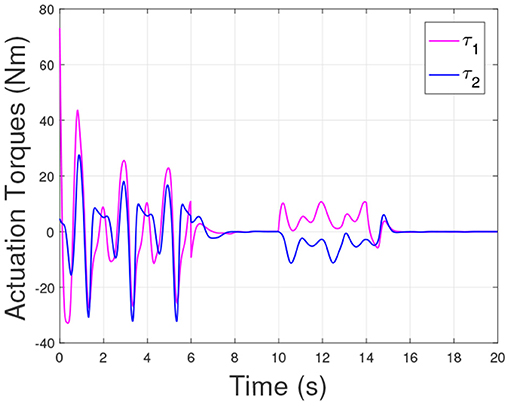
Figure 8. Actuation torques of the 2R manipulator during the control task of the comparison method.
5. Conclusion
Under the design frame of an MRAC based control system, a time-varying impedance controller is proposed for manipulators with uncertain structure parameters. We show that the proposed controller does not need to use acceleration-based feedback or measurement of the external loads, and the adaptive controller can tolerate considerable structure parameter errors. By employing a Lyapunov-like stability analysis approach, the globally uniform stability of the time-varying closed-loop system is analyzed, and a simple controller parameters selection approach is presented. Through a planar 2R manipulator, the feasibility of the proposed control method is verified by some numerical simulations. Our future work will focus on the anti-interference ability of the proposed controller.
Data Availability Statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author Contributions
XL: conceptualization, visualization, and supervision. GH: methodology. TS: software. SL and QZ: validation. CH: formal analysis. LZ: investigation. JY: resources. ZZ: writing-original draft preparation. TS and GH: writing-review and editing. JZ: project administration. XL and TS: funding acquisition. All authors have read and agreed to the published version of the manuscript. All authors agree to be accountable for the content of the work.
Funding
This work is supported by the National Key R&D Program of China under Grants 2019YFB1309603 and 2020AAA0105801, the Natural Science Foundation of Beijing under Grants L202020 and 4204097, the Natural Science Foundation of China under Grant 62003005, 62103007 and 51775002, Beijing Municipal Education Commission under Grant KM202110009009 and KZ202010009015, China Postdoctoral Science Foundation under Grant 2021M693404, Fundamental Research Funds for Beijing Municipal Universities, Yuyou Talent Support Project of North China University of Technology, and open research fund of the State Key Laboratory for Management and Control of Complex Systems under Grant 20210103.
Conflict of Interest
ZZ was employed by Beijing Aerospace Measurement & Control Technology Co., Ltd.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher's Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Ansari, Y., Manti, M., Falotico, E., Cianchetti, M., and Laschi, C. (2018). Multiobjective optimization for stiffness and position control in a soft robot arm module. IEEE Robot. Autom. Lett. 3, 108–115. doi: 10.1109/LRA.2017.2734247
Burgner-Kahrs, J., Rucker, D. C., and Choset, H. (2015). Continuum robots for medical applications: a survey. IEEE Trans. Robot. 31, 1261–1280. doi: 10.1109/TRO.2015.2489500
Deng, S., Cai, Q., Zhang, Z., and Wu, X. (2021a). User behavior analysis based on stacked autoencoder and clustering in complex power grid environment. IEEE Trans. Intell. Transp. Syst. 1–15. doi: 10.1109/TITS.2021.3076607
Deng, S., Chen, F., Dong, X., and Gao, G. (2021b). Short-term load forecasting by using improved GEP and abnormal load recognition. ACM Trans. Internet Technol. 21, 95. doi: 10.1145/3447513
Dong, X., Axinte, D., Palmer, D., Cobos, S., Raffles, M., Rabani, A., et al. (2017). Development of a slender continuum robotic system for on-wing inspection/repair of gas turbine engines. Robot. Comput. Integrat. Manuf. 44, 218–229. doi: 10.1016/j.rcim.2016.09.004
Ferraguti, F., Secchi, C., and Fantuzzi, C. (2013). A tank-based approach to impedance control with variable stiffness. in Proceedings of IEEE International Conference on Robotics and Automation (Karlsruhe), 4948–4953.
Hamedani, M. H., Zekri, M., and Sheikholeslam, F. (2019). Adaptive impedance control of uncertain robot manipulators with saturation effect based on dynamic surface technique and self-recurrent wavelet neural networks. Robotica 37, 161–188. doi: 10.1017/S0263574718000930
He, G. P., Fan, Y., Su, T. T., Zhao, L., and Zhao, Q. (2020). Variable impedance control of cable actuated continuum manipulators. Int. J. Control Autom. Syst. 18, 1839–1852. doi: 10.1007/s12555-019-0449-y
Hussain, S., Xie, S. Q., and Jamwal, P. K. (2013). Adaptive impedance control of a robotic orthosis for gait rehabilitation. IEEE Trans. Cybern. 43, no. 3, 1025–1034. doi: 10.1109/TSMCB.2012.2222374
Jamwal, P. K., Hussain, S., Ghayesh, M. H., and Rogozina, S. V. (2017). Adaptive impedance control of parallel ankle rehabilitation robot. J. Dyn. Syst. Meas. Control 139, 1–7. doi: 10.1115/1.4036560
Jutinico, A., Jaimes, J., Escalante, F., Perez-Ibarra, J., Terra, M., and Siqueira, A. (2017). Impedance control for robotic rehabilitation: a robust markovian approach. Front. Neurorobot. 11, 1–16. doi: 10.3389/fnbot.2017.00043
Kronander, K., and Billard, A. (2016). Stability considerations for variable impedance control. IEEE Trans. Robot. 32, 1298–1305. doi: 10.1109/TRO.2016.2593492
Li, Y. (2021). Command filter adaptive asymptotic tracking of uncertain nonlinear systems with time-varying parameters and disturbances. IEEE Trans. Autom. Control 1–8. doi: 10.1109/TAC.2021.3089626
Li, Y., Liu, Y., and Tong, S. (2021). Observer-based neuro-adaptive optimized control of strict-feedback nonlinear systems with state constraints. IEEE Trans. Neural Netw. Learn. Syst. 1–15. doi: 10.1109/TNNLS.2021.3051030
Li, Z., Huang, Z., He, W., and Su, C. Y. (2017). Adaptive impedance control for an upper limb robotic exoskeleton using biological signals. IEEE Trans. Ind. Electron. 64, 1664–1674. doi: 10.1109/TIE.2016.2538741
Liang, H., Guo, X., Pan, Y., and Huang, T. (2021a). Event-triggered fuzzy bipartite tracking control for network systems based on distributed reduced-order observers. IEEE Trans. Fuzzy Syst. 29, 1601–1614. doi: 10.1109/TFUZZ.2020.2982618
Liang, H., Liu, G., Zhang, H., and Huang, T. (2021b). Neural-network-based event-triggered adaptive control of nonaffine nonlinear multiagent systems with dynamic uncertainties. IEEE Trans. Neural Netw. Learn. Syst. 32, 2239–2250. doi: 10.1109/TNNLS.2020.3003950
Liu, L., Cui, Y., Liu, Y. J., and Tong, S. (2021a). Observer-based adaptive neural output feedback constraint controller design for switched systems under average dwell time. IEEE Trans. Circuits Syst. I Regul. Papers 68, 3901–3912. doi: 10.1109/TCSI.2021.3093326
Liu, L., Liu, Y. J., Chen, A., Tong, S., and Chen, C. L. P. (2020). Integral Barrier Lyapunov function-based adaptive control for switched nonlinear systems. Sci. China Inf. Sci. 63, 132203. doi: 10.1007/s11432-019-2714-7
Liu, Q., Liu, A., Meng, W., Ai, Q., and Xie, S. (2017). Hierarchical compliance control of a soft ankle rehabilitation robot actuated by pneumatic muscles. Front. Neurorobot. 11, 1–19. doi: 10.3389/fnbot.2017.00064
Liu, Y. J., Zhao, W., Liu, L., Li, D., Tong, S., and Chen, C. L. P. (2021b). Adaptive neural network control for a class of nonlinear systems with function constraints on states. IEEE Trans. Neural Netw. Learn. Syst. 1–10. doi: 10.1109/TNNLS.2021.3107600
McMahan, W., Chitrakaran, V., Csencsits, M., Dawson, D., Walker, I. D., Jones, B. A., et al. (2006). “Field trials and testing of the OctArm continuum manipulator,” in Proceedings of IEEE International Conference on Robotics and Automation (Orlando, FL), 2336–2341.
Murray, R., Li, Z. X., and Sastry, S. (1994). A Mathematical Introduction To Robotic Manipulation. Boca Raton, FL: CRC Press.
Pena, G. G., Consoni, L. J., dos. Santos, W. M., and Siqueira, A. A. G. (2019). Feasibility of an optimal EMG-driven adaptive impedance control applied to an active knee orthosis. Robot. Auton. Syst. 112, 98–108. doi: 10.1016/J.ROBOT.2018.11.011
Perez-Ibarra, J. C., Siqueira, A. A. G., Silva-Couto, M. A., de. Russo, T. L., and Krebs, H. I. (2019). Adaptive impedance control applied to robot-aided neuro-rehabilitation of the ankle. IEEE Robot. Autom. Lett. 4, no. 2, 185–192. doi: 10.1109/LRA.2018.2885165
Sharifi, M., Behzadipour, S., and Salarieh, H. (2016). Nonlinear bilateral adaptive impedance control with applications in telesurgery and telerehabilitation. J. Dyn. Syst. Meas. Control 138, 111010. doi: 10.1115/1.4033775
Su, T., Cheng, L., Wang, Y., Liang, X., Zheng, J., and Zhang, H. (2018). Time-optimal trajectory planning for delta robot based on quintic pythagorean-hodograph curves. IEEE Access 6, 28530–28539. doi: 10.1109/ACCESS.2018.2831663
Su, T., Niu, L., He, G., Liang, X., Zhao, L., and Zhao, Q. (2020). Coordinated variable impedance control for multi-segment cable-driven continuum manipulators. Mech. Mach. Theory 153, 1–19. doi: 10.1016/j.mechmachtheory.2020.103969
Tong, S., Min, X., and Li, Y. (2020). Observer-based adaptive fuzzy tracking control for strict-feedback nonlinear systems with unknown control gain functions. IEEE Trans. Cybern. 50, 3903–3913. doi: 10.1109/TCYB.2020.2977175
Wu, D., He, Y., Luo, X., and Zhou, M. (2021a). A latent factor analysis-based approach to online sparse streaming feature selection. IEEE Trans. Syst. Man Cybern. Syst. 1–15. doi: 10.1109/TSMC.2021.3096065
Wu, D., Luo, X., Shang, M., He, Y., Wang, G., and Dong, X. (2020a). A data-characteristic-aware latent factor model for web service QoS prediction. IEEE Trans. Knowl. Data Eng. 1–12. doi: 10.1109/TKDE.2020.3014302
Wu, D., Luo, X., Shang, M., He, Y., Wang, G., and Zhou, M. (2021b). A deep latent factor model for high-dimensional and sparse matrices in recommender systems. IEEE Trans. Syst. Man Cybern. Syst. 51, 4285–4296. doi: 10.1109/TSMC.2019.2931393
Wu, D., Shang, M., Luo, X., and Wang, Z. (2021c). An L1-and-L2-norm-oriented latent factor model for recommender systems. IEEE Trans. Neural Netw. Learn. Syst. 1–14. doi: 10.1109/TNNLS.2021.3071392
Wu, E. Q., Hu, D., Deng, P. Y., Tang, Z., Cao, Y., Zhang, W. M., et al. (2020b). Nonparametric bayesian prior inducing deep network for automatic detection of cognitive status. IEEE Trans. Cybern. 51, 5483–5496. doi: 10.1109/TCYB.2020.2977267
Wu, E. Q., Lin, C. T., Zhu, L. M., Tang, Z. R., Jie, Y. W., and Zhou, G. R. (2021d). Fatigue detection of pilots' brain through brains cognitive map and multilayer latent incremental learning model. IEEE Trans. Cybern. 1–13. doi: 10.1109/TCYB.2021.3068300
Wu, E. Q., Zhou, G. R., Zhu, L. M., Wei, C. F., Ren, H., and Sheng, R. S. F. (2021e). Rotated sphere haar wavelet and deep contractive auto-encoder network with fuzzy Gaussian SVM for pilot's pupil center detection. IEEE Trans. Cybern. 51, 332–345. doi: 10.1109/TCYB.2018.2886012
Xu, G., Song, A., and Li, H. (2011). Adaptive impedance control for upper-limb rehabilitation robot using evolutionary dynamic recurrent fuzzy neural network. J. Intell. Robot. Syst. 62, 501–525. doi: 10.1007/s10846-010-9462-3
Yang, Y., Vamvoudakis, K. G., Modares, H., Yin, Y., and Wunsch, D. C. (2021). Hamiltonian-driven hybrid adaptive dynamic programming. IEEE Trans. Syst. Man Cybern. Syst. 51, 6423–6434. doi: 10.1109/TSMC.2019.2962103
Yip, M. C., and Camarillo, D. B. (2016). Model-less hybrid position/force control: a minimalist approach for continuum manipulators in unknown, constrained environments. IEEE Robot. Autom. Lett. 1, 844–851. doi: 10.1109/LRA.2016.2526062
Keywords: adaptive, intelligent control, time-varying, human–robot interaction, MRAC
Citation: Liang X, Su T, Zhang Z, Zhang J, Liu S, Zhao Q, Yuan J, Huang C, Zhao L and He G (2022) An Adaptive Time-Varying Impedance Controller for Manipulators. Front. Neurorobot. 16:789842. doi: 10.3389/fnbot.2022.789842
Received: 05 October 2021; Accepted: 11 February 2022;
Published: 18 March 2022.
Edited by:
Di Wu, Chongqing Institute of Green and Intelligent Technology (CAS), ChinaReviewed by:
Junyong Zhai, Southeast University, ChinaLei Liu, Liaoning University of Technology, China
Yuanxin Li, Liaoning University of Technology, China
Copyright © 2022 Liang, Su, Zhang, Zhang, Liu, Zhao, Yuan, Huang, Zhao and He. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Guangping He, hegp55@ncut.edu.cn