Exploiting redundancy for UWB anomaly detection in infrastructure-free multi-robot relative localization
 Sahar Salimpour
Sahar Salimpour Paola Torrico Morón
Paola Torrico Morón Xianjia Yu
Xianjia Yu Tomi Westerlund
Tomi Westerlund Jorge Peña-Queralta
Jorge Peña-Queralta- 1Turku Intelligent Embedded and Robotic Systems (TIERS) Lab, University of Turku, Turku, Finland
- 2SCAI Laboratory at SPZ, Swiss Federal School of Technology in Zürich–ETH Zürich, Zürich, Switzerland
Ultra-wideband (UWB) localization methods have emerged as a cost-effective and accurate solution for GNSS-denied environments. There is a significant amount of previous research in terms of resilience of UWB ranging, with non-line-of-sight and multipath detection methods. However, little attention has been paid to resilience against disturbances in relative localization systems involving multiple nodes. This paper presents an approach to detecting range anomalies in UWB ranging measurements from the perspective of multi-robot cooperative localization. We introduce an approach to exploiting redundancy for relative localization in multi-robot systems, where the position of each node is calculated using different subsets of available data. This enables us to effectively identify nodes that present ranging anomalies and eliminate their effect within the cooperative localization scheme. We analyze anomalies created by timing errors in the ranging process, e.g., owing to malfunctioning hardware. However, our method is generic and can be extended to other types of ranging anomalies. Our approach results in a more resilient cooperative localization framework with a negligible impact in terms of the computational workload.
1 Introduction
In recent years, there has been a growing interest in the development of anomaly detection in various applications, including fraud and fault detection in safety systems (Yang et al., 2017), healthcare (Fernando et al., 2021), and autonomous robots (Salimpour et al., 2022b). Anomaly detection, also known as foreign detection or outlier detection, is the process of finding anomalous patterns in a given dataset. It can be applied to different types of data, including numerical data, images, videos, audio, text, or time series data (Bogdoll et al., 2022; Chatterjee and Ahmed, 2022). Many multi-robot applications are also at risk of being affected by anomalous data or byzantine agents which can disrupt the entire operation (Deng et al., 2021; Ferrer et al., 2021). The attack can target visual sensors, communication sensors, and positioning and localization sensors such as lidars, GNSS, or ultra-wideband (UWB). In our recent work, we presented a decentralized method for anomalies and byzantine agent detection in multi-robot systems using an external motion capture (MOCAP) system to determine the robot’s location (Salimpour et al., 2022a). In this paper, our objective is to use UWB technology for multi-robot relative localization while being able to detect byzantine robots that generate false or anomalous ranging information.
Global Navigation Satellite Systems (GNSS), such as the Global Positioning System (GPS), are widely employed for accurate global positioning in outdoor environments. Non-etheless, GNSS cannot reliably perform indoors and may be disrupted by attacks, or by jamming signals at the receiver. Among the localization approaches in GNSS-denied and indoor environments, UWB technology has emerged as a robust solution for relative localization and state estimation in multi-robot systems (Queralta et al., 2020). A UWB-based system could replace expensive and complicated MOCAP systems and achieve centimeter-level localization accuracy for mobile robots. Fixed anchors and mobile tags are the two types of nodes used in UWB localization, while time of flight (ToF) and time difference of arrival (TDoA) are two popular methods for ranging measurements (Morón et al., 2022).
In this paper, a multi-robot cooperative positioning system employs UWB nodes in each robot to achieve robust relative localization in GNSS-denied environments through information sharing. For UWB ranging, we rely on time of flight (ToF) measurements between all pairs of nodes. Trilateration or multilateration algorithms can be used to determine the position of the tags (Wang et al., 2021). In 2D localization, which relies on at least two nodes to determine the tag’s position, the estimated positions might slightly vary depending on the reference nodes used. Using all available nodes, we propose a multiconfigurational localization method to determine optimal positions and make them resilient to fixed anchors. The core idea is to exploit redundancy in terms of the ways in which the relative positions can be calculated. This is possible because a higher number of ranges are measured than the minimum needed to ensure a unique solution in the relative localization problem (except for translations, rotations and mirror solutions).
Numerous research has been conducted in the UWB relative localization systems in terms of obtaining robust and reliable localization performance in swarms of robots. However, wireless networking makes multi-robot systems vulnerable to various types of attacks, so the UWB ranging mechanism is not immune to ranging attacks, such as malicious interference, sensor failure, timing error, or jamming, among others. In multi-robot cooperative localization, it is crucial not only to detect the anomalous pattern but also to identify and eliminate byzantine robot that can tamper with their ToF measurement, manipulating the distance measurement and creating false ranging information for other nodes (Karapistoli and Economides, 2014).
Statistical-based approaches in related works, such as Kalman filters (Ma et al., 2019), detect outliers and estimate normal values in UWB ranges. However, in this study, the anomaly is a UWB transceiver (robot) that may generate a normal but altered data pattern. We propose a robust anomaly detection framework based on the fusion of all possible position configurations using different reference nodes. We developed our code based on ROS 2 and verified the proposed approach in real-world robot navigation. Our proposed method identifies unreliable UWB node at each time stamp and eliminates them from the cooperative localization pipeline within the multi-robot system. In this contribution, we calculate the least square error of the reference node’s corresponding configurations and the dispersion of the remaining configurations after applying fixed-UWB range matching.
The remainder of this document is organized as follows. In Section II, we review related works for UWB relative localization and anomaly detection in robotics. Section III describes our methodology for cooperative localization and the detection of abnormal UWB data and robots. Section IV describes the experimental results. Finally, Section V summarizes the work and outlines future directions.
2 Related work
2.1 Anomaly detection in robotics
Detection of anomalies in robotics, such as unusual data patterns (He et al., 2018), abnormal behaviors, or abnormal sensors, can broadly be divided into two areas: self-monitoring and group monitoring. In self-monitoring approaches, each robot detects anomalies independently. Meanwhile in group-detection approach, multiple robots are involved in detecting malicious data or byzantine agents (Salimpour et al., 2022a). In both scenarios, knowledge-based approaches typically learn the distribution of normal data in order to make the model robust to abnormal data. In Olive and Basora (2020), a simple autoencoder framework based on reconstruction error was presented to detect anomalies in trajectory data. Such approaches require sufficient samples for the training data.
2.2 UWB-based localization in mobile robots
UWB has been widely adopted in robotics and autonomous field and its applications include global or relative localization and wireless mesh sensor networks for situated communication (Xianjia et al., 2021a). UWB can significantly benefit localization in the robotics field, particularly in GNSS-denied environments (Alarifi et al., 2016), seamlessly transition between indoor and outdoor environments while keeping centimeter-level global or relative position accuracy (Almansa et al., 2020). Most of the UWB positioning solutions, both commercial and in academia, are based on fixed anchors in known locations. Some studies are focusing on utilizing various approaches to improve localization accuracy. In Poulose and Han (2020), the authors applied Long Short-term Memory (LSTM) to estimate the user position based on anchors and achieved comparable accuracy to traditional approaches including triangulation. More recently, relative localization has gained traction within multi-robot collaborative localization problems as it enables higher degrees of flexibility and infrastructure-free deployments (Yu et al., 2023). With multiple UWB transceivers mounted in each robot, relative positions among robots can be estimated (Nguyen et al., 2018). This applies to various applications, including autonomous docking (Nguyen et al., 2019), collaborative scene reconstruction (Queralta et al., 2022), and others. By integrating UWB with other sensors including visual odometry, and GNSS, the robots can obtain more accurate and robust relative positions (Qi et al., 2020; Xu et al., 2020; Xianjia et al., 2021b).
2.3 UWB anomaly detection
Outliers and malicious data are crucial factors that can significantly affect the accuracy of UWB-based positioning algorithms. To boost the accuracy and reliability of localization, many researchers have proposed various solutions to detect and address outlier data in both line-of-sight (LOS) and non-line-of-sight (NLOS) conditions. For example, the authors in Dwek et al. (2019) used an extended Kalman filter (EKF) for sensor fusion, and outlier detection based on residual error on UWB ranges at each time step. In Che et al. (2021), an anomaly detection approach is presented for UWB indoor positioning based on Gaussian Distribution and Generalized Gaussian Distribution algorithms. This paper has used the variance of the estimated distance and the power of the first path to classify NLoS environment. In another study (Wang et al., 2021), authors proposed an anomaly detection treatment using the derivatives of the mean function of a UWB range time series to denoise and correct dropouts and outliers.
In summary, most existing approaches look for out-of-distribution data. Such statistical outlier detection methods are not ideal for anomalous agent detection problems, as large numbers of data need to be analyzed with a high computational load and may not detect faults immediately. For example, individual range distributions might be nominal to a LOS measurement but shifted or biased. To approach this issue, we present instead an approach where we exploit redundancy in ranging measurements and perform a statistical outlier detection at the multi-robot system level rather than individual measurement level.
3 Methodology
This section presents details of the multi-robot cooperative localization approach we present for an infrastructure-free (or anchor-free) anomaly-resilient relative localization. We also compare the anomaly detection process with Multilateration (MLAT) to the use of a Gradient Descent (GD) algorithm. All these localization and anomaly detection processes run in real-time in a laptop connected to the same network as the robots. The laptop and robots run ROS 2 Galactic under Ubuntu 20.04. The UWB distances are received by an external passive UWB node directly connected to the laptop over serial.
3.1 Hardware
In the experiments, we used eight TurtleBot4 Lite mobile robot platforms built on top of the iRobot Create 3 base, denoted as
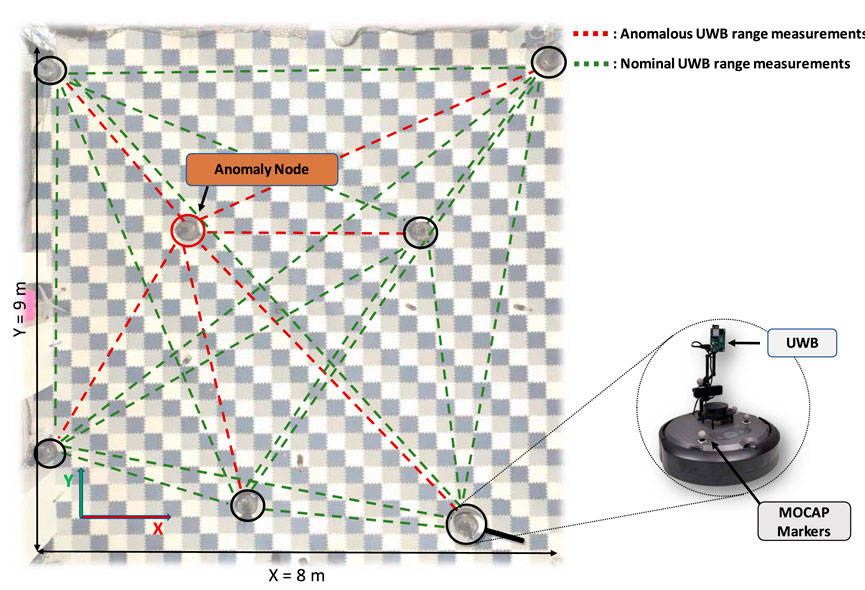
FIGURE 1. Illustration of the experimental arena and positions of the customized Turtlebot 4 robots utilized for this study, at a given time during the experiments. Here we show in red the range measurements that are inaccurate, with nominal ranges in green.
3.2 UWB-based cooperative localization
In the remaining portions of this paper, we use the following notation. N robots are considered, with their positions indicated by pi, with i ∈ {1, … , N}. Based on the time of flight of a message, ToF localization measures the distance between two nodes by exchanging messages between them and can be computed following Eq. 1:
where Tinit is the time measured between the instant when a ranging request is initiated by a given node to another, and until the reply from the latter is received at the former. Tres denotes the time it takes the receiver to receive, process and return the message. The return transmission time is, in practice, scheduled in time, ensuring a more accurate value. With this information embedded in the response message, we can determine the distance between the two nodes. A comprehensive error analysis for such deployment with mobile nodes is available in Torrico Morón et al. (2023). Despite the higher accuracy of double-sided two-way ranging (Sidorenko et al. 2020), we implement only one-sided two-way ranging in this work to increase the ranging frequency. The difference in clock frequencies can induce higher error; however, our experimental data did not show signs of large differences between the two.
During the experiments, the ranging frequency is 14 Hz for each distance measured, for a total of 392 Hz considering all ranges. With this frequency, we assume that the movement of the robots is negligible in comparison to the time it takes to obtain all distances across the system. At the maximum speed, robots can travel a maximum of approximately 2 cm, for a maximum cumulative range error of 4 cm. This is a limitation in terms of applicability to systems where nodes move faster, in which case the ranging frequency should be increased. A potential solution to this limitation is to compensate the ranges if an estimate of each robot’s odometry is available.
In our proposed cooperative localization method, each point’s position pi is determined based on all possible base anchor pairs in the system. Let
This method finds two possible intersection points. Having accurately determined the position of each point by considering all conceivable pairs of nodes, it follows that any intersection point on either side could potentially be the correct point. Consequently, an additional point is required to ascertain the correct side. According to Eq. 3, the distance between the first target point (robot) and the next points is taken into account to eliminate one of the intersection points based on the distance error. The generated layouts are later transferred based on the two fixed nodes for a common orientation reference. Figure 2 shows three different layouts generated by various pair base nodes. It is worth noting that nodes are assumed to be moving, without stationary assumptions for the localization problem. For multilateration-based localization, an analysis on the errors is provided in our previous work (Torrico Morón et al., 2023). This error is not directly comparable to Decawave’s localization system error, since it is based on anchor nodes in fixed and known locations, and therefore only a subset of the positions (those of moving nodes, or tags) are calculated. Our solution, instead, is infrastructure-free. We refer the reader to the existing literature for assessing the type of localization errors in such fixed-infrastructure systems (Queralta et al., 2020).

FIGURE 2. Illustration of node positions calculated using the multilateration method. The blue points represent normal nodes, while the red node generates anomalous ranges. The dotted red lines illustrate noisy UWB range measurements generated by the anomaly node. Subfigures (A) and (B) are configurations generated using two different pairs of normal nodes as the reference basis, while in (C) one of the reference nodes is the anomaly.
Once all layouts are generated, the robots’ final positions can be defined as shown in Algorithm 1. During the initial stage of the matching function, an average configuration, identified as
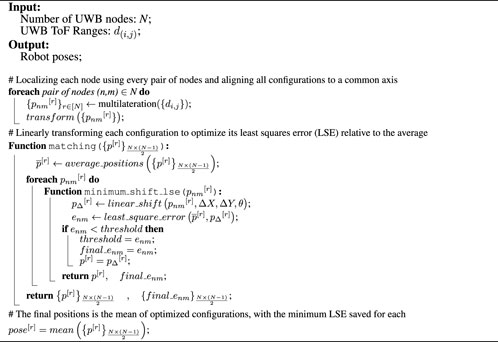
Algorithm 1. Cooperative Localization Method.
3.3 Identification of anomaly nodes
During the cooperative localization step, the final layouts and their LSE were computed. In order to identify anomalous nodes, each individual node’s error is determined based on the N – 1 configurations in which it has been involved. Whenever the error of an anchor exceeds a certain threshold, all related configurations to that anchor are removed. Figure 2C illustrates how a configuration is developed using an anomaly as a base node. Detecting anomalies becomes challenging when two nodes contribute to an erroneous configuration, leading to potential instances of both incorrectly identified anomalies (false positives) and accurately identified anomalies (true positives). To tackle this issue, the standard deviation of each anchor’s position is calculated after removing configurations associated with each potential anomaly. This considers the possibility that either base node of each configuration could be the anomaly.
The standard deviation of the positions of each anchor is measured after removing the related configurations of each potential anomaly:
Where N is the number of UWB nodes. Then the obtained
Algorithm 2. Anomaly Detection Method.
3.4 Gradient descent optimization
Gradient descent as an optimization algorithm has been used to reduce the loss function in various models. The goal of gradient descent in UWB localization is to position the nodes by minimizing the distance error (Ridolfi et al., 2021). The basic idea behind gradient descent is to iteratively update the positions by taking a step in the opposite direction of the gradient. By iterating this process, gradient descent gradually converges to final positions that minimize the error function. Gradient descent requires initial parameter values to start the optimization process. For the convergence speed and stability of the algorithm, the initial reference system for the optimization process has been calculated using the UWB collaborative localization method described in subsection B. After the anchors are initialized, their positions are modified by minimizing the loss function. The loss function is defined as the difference between points pi and pj reported UWB distance d(i,j), and their estimated 2D distance (5):
Figure 3 illustrates how each point coordinates with other nodes to be located at an optimal position based on the loss function. In our experiment, we specified the learning rate for the gradient descent algorithm to be 0.01, and we performed 100 iterations as part of the optimization process. In Figure 3B, it is shown that with the gradient descent method, anomalies impact also other nodes’ positions regardless of the base nodes, as the global error is minimized, with anomalies generating a non-convex cost function.
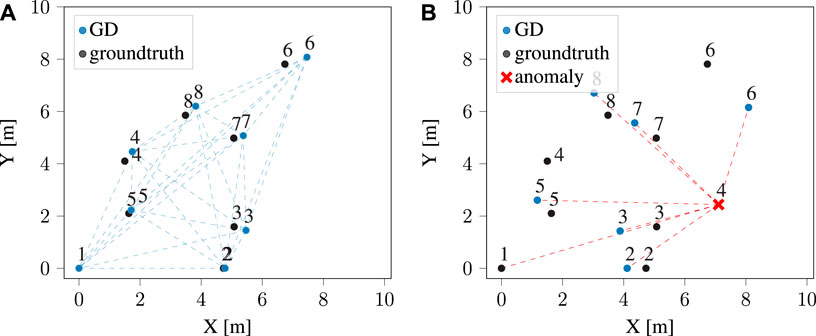
FIGURE 3. Illustration of calculated positions using gradient descent method in (A) normal nodes, and (B) in the existence of anomaly.
4 Experimental results
In this section, we focus on the results of experiments carried out to validate the functionality of the proposed methods. First, we evaluate the viability of the proposed cooperative localization framework on normal UWB ranges in comparison to the optimized positions using the gradient descent algorithm. Then, we assess the behavior of these methods in the presence of anomalies.
4.1 Cooperative localization with nominal ranging
The findings of this study regarding the trajectory error of the multilateration method based on the anchor-free cooperative framework for normal data for different agents are presented in Figure 4. Specifically, the performance of the multilateration method was evaluated and compared with the gradient descent optimization technique. Through the implementation of gradient descent, the position of each anchor was optimized, which resulted in a slight reduction in the total error as compared to the multilateration method. Nevertheless, it is essential to highlight that the computational time needed for the gradient descent optimization technique exceeds that of the multilateration method, given that the average convergence time in gradient descent is approximately 0.07 s. Therefore, while the gradient descent optimization technique may offer a slight improvement in positioning accuracy, it may not be the most practical approach in scenarios where computational efficiency is a critical consideration. As an example, Figure 6A provides the trajectory results of both methods for the normal dataset. During the data acquisition, we wanted to study whether the anomaly would be detected independently of having LOS or NLOS ranging conditions. Therefore, the trajectories of the nodes are generated in a way such that Node 5 range measurements suffer of NLOS conditions significantly more than others.
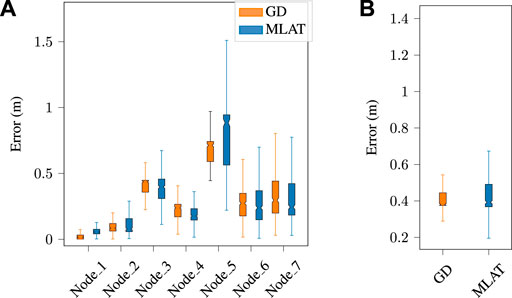
FIGURE 4. Multilateration and gradient descent-based trajectory error for (A) each individual node, and (B) the average error for normal dataset. The error distribution is significantly larger in Node 5 due to repeated NLOS conditions during the experiments.
4.2 Anomaly detection
The multilateration method proposed in this study utilizes linear transformations and shifts for all configurations. As a result, the estimated distances between nodes remain fixed at each timestamp, enabling the use of dispersion-based anomaly detection techniques to detect any irregular layouts or nodes. Figure 5 presents a clear visualization of the node distribution at a specific timestamp. It is evident from subfigure (a) that the anomalous node was transmitting erroneous UWB ranges to all nodes, resulting in a wide distribution of positions.
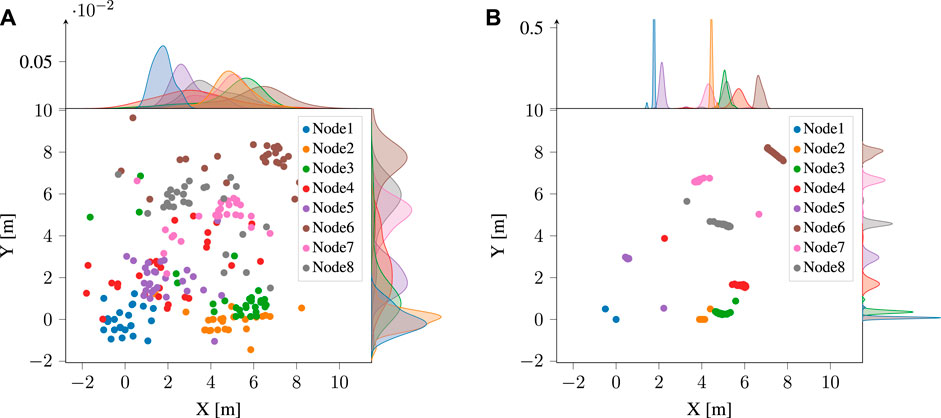
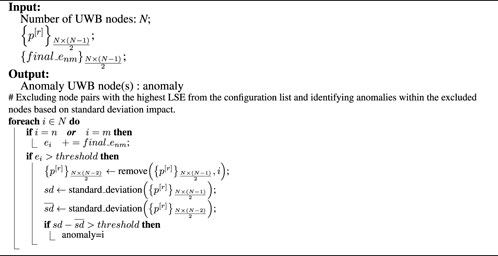
FIGURE 5. Example of estimated positions, from a single set of measurements, using (A) MLAN, and (B) GD. The data includes anomalies. Each of the data points represents the position calculated using a single pair of nodes for the origin and x-axis orientation. All the estimates are then rotated and shifted as needed for comparison.
In the context of detecting anomalies, gradient descent minimizes the distance error between the predicted values and the actual values of each node. As a result, the positions of each node from different configurations have converged in a way that leads to similar distributions for all nodes, including the anomaly node. This means that, at each timestamp, the anomaly node may not stand out as being significantly different from the other nodes, as shown in subfigure (b). Figures 6A, B illustrate the calculated trajectory of a normal node in the absence of an anomaly and disturbed by an anomaly, respectively, using both the proposed multilateration and gradient descent techniques. In Subfigure (c), anomaly detection and elimination results are shown using both methods, while subfigure (d) shows slightly different results when multilateration anomaly detection is followed by gradient descent optimization for positioning.
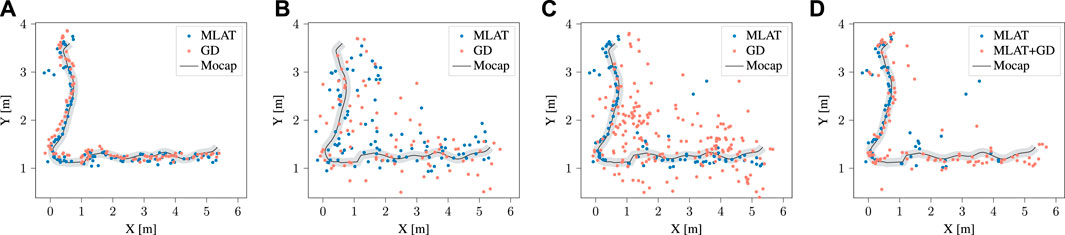
FIGURE 6. Estimated trajectories of a normal agent (node) using multilateration and gradient descent methods in the (A) absence, (B) presence of an anomalous node, (C) after removing the anomalous layout by each method, and (D) after removing the anomaly and optimizing the positions by gradient descent.
Figure 7 also displays the trajectory error of all agents for both methods. Notably, in the case of anomalies, the gradient descent algorithm yields a higher error at each node and also results in a larger total error.
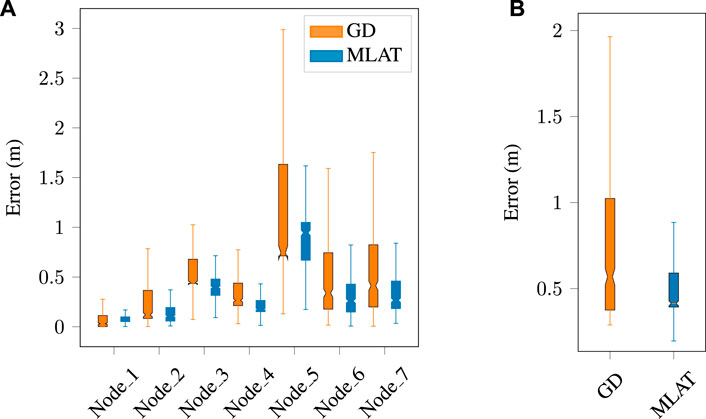
FIGURE 7. Multilateration and gradient descent-based trajectory error for (A) each individual node, and (B) the average error in the presence of an anomaly. The errors increase in a mostly linear relation with respect to the anomaly-free data, for both LOS and NLOS (Node 5) measurements.
In the confusion matrix, in Figure 8, we evaluated the performance of both methods with and without the anomaly. As previously discussed, both techniques perform similarly, with a balance between speed and accuracy when dealing with normal data, marked as None in the matrix. However, when it comes to detecting anomalies, multilateration provides better accuracy, and the false negative rate of the gradient descent technique is high, indicating that the model is missing a significant number of anomalies.
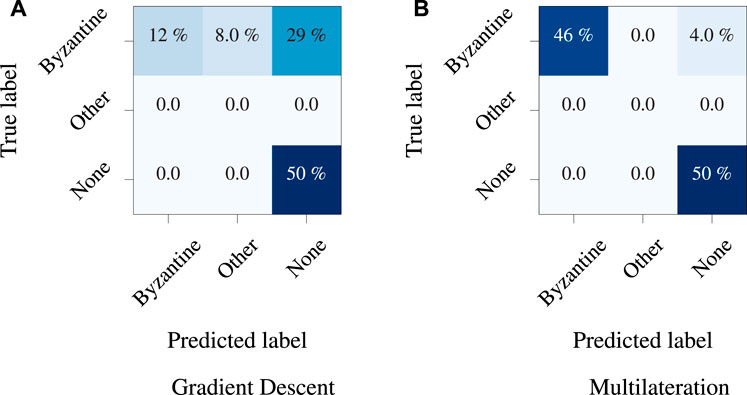
FIGURE 8. Confusion matrices for the (A) GD, and (B) MLAN anomaly detection methods studied in this paper. The optimization done in the gradient descent method hinders the detection of anomalies owing to a lower global relative positioning error.
4.3 Large-scale simulation results
In order to assess the efficacy of our proposed method within a larger environment and extended UWB ranges, we conducted simulations due to the unavailability of real-world settings covering, for example, 100 m × 100 m. We have developed a Python-based simulation environment where UWB ranges are simulated based on real-world noise measurements, leveraging our previous work in Torrico Morón et al. (2023). We varied configurations with up to 100 nodes. The simulated temporal errors inducing anomalies were increased proportionally with the distances between the corresponding nodes. Following the evaluation of real-world results using a confusion matrix in Figure 8, the accuracy of the model for simulated data was compared using the F1 score across diverse configurations. The comparison is illustrated in Figure 9 for node quantities ranging from 8 to 100, including one anomaly node per every 8 nodes. Consistent accuracy is observed when additional nodes are introduced, resulting in minimal changes in the model’s accuracy. The graph depicts the model’s sustained accuracy in terms of F1 score, encompassing true positive, false positive detection, and true negative detection.
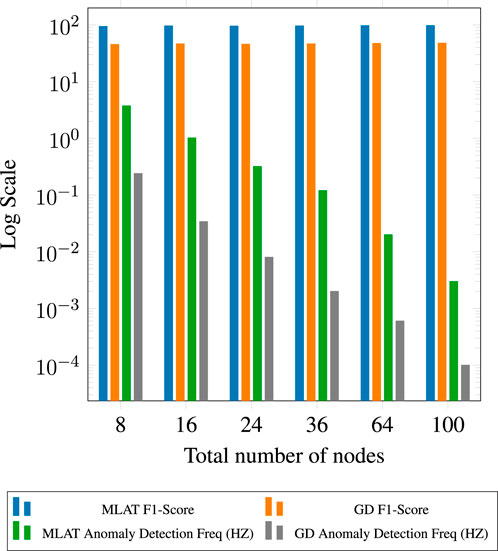
FIGURE 9. Comparison of F1 Scores for MLAT and GD algorithms across different numbers of simulated nodes.
We also compared the results obtained from gradient descent and multilateration algorithms. Similar to the real-world results, multilateration significantly outperforms gradient descent algorithms for anomaly detection. As part of our analysis, we also compared the two algorithms from a computational perspective, and the findings clearly highlight the superiority of multilateration in detecting anomalies with a considerably higher frequency compared to gradient descent(9). Figure 10 visually presents an example of the outcomes of anomalous node detection, marked in red, alongside pathways of normal nodes following anomaly elimination through the multilateration algorithm.
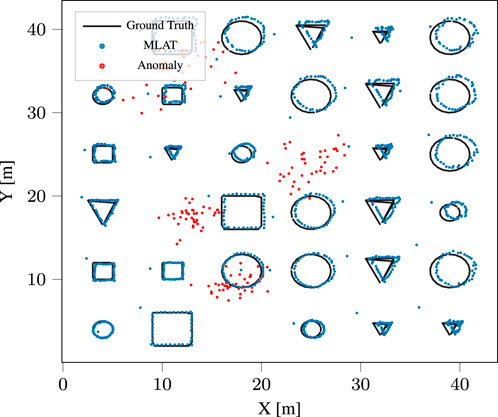
FIGURE 10. Simulated ground truth and anomaly-free trajectory, alongside the anomalous nodes.
By augmenting the number of nodes and concurrently adjusting the size of UWB ranges, we examined the impact of anomaly-generated errors on the model’s accuracy. We explored the influence of different anomaly range errors, stemming from temporal errors. Figure 11 illustrates the correlation between the anomaly’s range error and the model’s accuracy, measured in terms of F1 scores. To obtain comprehensive results, we conducted this analysis across various node quantities. As depicted in the figure, as the anomalous range diminishes, the detection becomes more challenging.
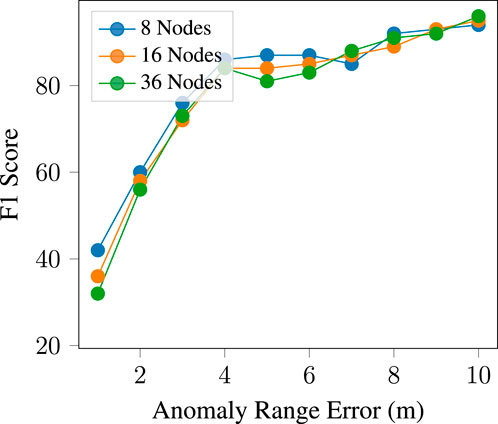
FIGURE 11. Model accuracy across various anomalous range errors for different node configurations.
5 Conclusion and future work
This paper proposes a novel approach to detecting anomalies in UWB ranging in mobile robots by exploiting redundant localization data. Specifically, throughout the paper, we have studied the problem of identifying anomalous nodes in a multi-robot system. The anomalies can be caused by byzantine agents, due to either malicious behavior or hardware or timing problems. Both multilateration and optimization-based methods are typical in the literature in terms of relative localization estimation. Despite the higher accuracy of optimization methods, we show in this study how leveraging redundancy allows for multilateration methods to be more robust in identifying anomalies. Our approach consists in calculating relative positions with different subsets of ranging data, with results that can then be compared to each other. In comparison, a gradient descent method analyzed in the paper that minimizes global error masks the anomalies instead. Once the anomalous nodes are detected, however, optimization-based methods can be used to increase the accuracy of the relative localization. Overall, our experiments with multiple real robots show that the proposed method works and clearly outperforms anomaly detection based on a gradient descent method for relative localization.
In future work, we will study different types of anomalies. We are particularly interested in analyzing the performance of this method for NLOS ranging detection, specially when only a subset of ranges from a given node present anomalies.
Data availability statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author contributions
SS and JP-Q conceived and conceptualized the work. SS elaborated the methods and implemented the software. PTM was responsible of hardware and data collection. SS and PTM carried out the data processing and analysis. SS and XY conceived and illustrated the figures. JP-Q supervised the work. TW provided funding. All the authors critically reviewed the final work. All authors contributed to the article and approved the submitted version.
Funding
This research work is supported by the Academy of Finland’s AeroPolis project (Grant No. 348480), and by the R3Swarms project funded by the Secure Systems Research Center (SSRC), Technology Innovation Institute (TII).
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Alarifi, A., Al-Salman, A., Alsaleh, M., Alnafessah, A., Al-Hadhrami, S., Al-Ammar, M. A., et al. (2016). Ultra wideband indoor positioning technologies: analysis and recent advances. Sensors 16, 707. doi:10.3390/s16050707
Almansa, C. M., Shule, W., Queralta, J. P., and Westerlund, T. (2020). Autocalibration of a mobile uwb localization system for ad-hoc multi-robot deployments in gnss-denied environments. arXiv preprint arXiv:2004.06762.
Bogdoll, D., Nitsche, M., and Zöllner, J. M. (2022). “Anomaly detection in autonomous driving: a survey,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 4488–4499.
Chatterjee, A., and Ahmed, B. S. (2022). Iot anomaly detection methods and applications: a survey. Internet Things 19, 100568. doi:10.1016/j.iot.2022.100568
Che, F., Ahmed, Q. Z., Khan, F. A., and Lazaridis, P. I. (2021). “Anomaly detection based on generalized Gaussian distribution approach for ultra-wideband (uwb) indoor positioning system,” in 2021 26th International Conference on Automation and Computing (ICAC) (IEEE), 1–5.
Deng, G., Zhou, Y., Xu, Y., Zhang, T., and Liu, Y. (2021). “An investigation of byzantine threats in multi-robot systems,” in Proceedings of the 24th International Symposium on Research in Attacks, 17–32. Intrusions and Defenses.
Dwek, N., Birem, M., Geebelen, K., Hostens, E., Mishra, A., Steckel, J., et al. (2019). Improving the accuracy and robustness of ultra-wideband localization through sensor fusion and outlier detection. IEEE Robotics Automation Lett. 5, 32–39. doi:10.1109/lra.2019.2943821
Fernando, T., Gammulle, H., Denman, S., Sridharan, S., and Fookes, C. (2021). Deep learning for medical anomaly detection–a survey. ACM Comput. Surv. (CSUR) 54, 1–37. doi:10.1145/3464423
Ferrer, E. C., Jiménez, E., Lopez-Presa, J. L., and Martín-Rueda, J. (2021). Following leaders in byzantine multirobot systems by using blockchain technology. IEEE Trans. Robotics 38, 1101–1117. doi:10.1109/tro.2021.3104243
He, Y., Peng, Y., Wang, S., and Liu, D. (2018). Admost: uav flight data anomaly detection and mitigation via online subspace tracking. IEEE Trans. Instrum. Meas. 68, 1035–1044. doi:10.1109/tim.2018.2863499
Karapistoli, E., and Economides, A. A. (2014). Adlu: a novel anomaly detection and location-attribution algorithm for uwb wireless sensor networks. EURASIP J. Inf. Secur. 2014, 3–12. doi:10.1186/1687-417x-2014-3
Ma, F., He, J., and Zhang, X. (2019). Robust kalman filter algorithm based on generalized correntropy for ultra-wideband ranging in industrial environment. IEEE Access 7, 27490–27500. doi:10.1109/access.2019.2901940
Morón, P. T., Queralta, J. P., and Westerlund, T. (2022). Towards large-scale relative localization in multi-robot systems with dynamic uwb role allocation. arXiv preprint arXiv:2203.03893.
Nguyen, T.-M., Nguyen, T. H., Cao, M., Qiu, Z., and Xie, L. (2019). “Integrated uwb-vision approach for autonomous docking of uavs in gps-denied environments,” in 2019 International Conference on Robotics and Automation (ICRA) (IEEE), 9603–9609.
Nguyen, T.-M., Zaini, A. H., Wang, C., Guo, K., and Xie, L. (2018). “Robust target-relative localization with ultra-wideband ranging and communication,” in 2018 IEEE international conference on robotics and automation (ICRA) (IEEE), 2312–2319.
Olive, X., and Basora, L. (2020). Detection and identification of significant events in historical aircraft trajectory data. Transp. Res. Part C Emerg. Technol. 119, 102737. doi:10.1016/j.trc.2020.102737
Poulose, A., and Han, D. S. (2020). Uwb indoor localization using deep learning lstm networks. Appl. Sci. 10, 6290. doi:10.3390/app10186290
Qi, Y., Zhong, Y., and Shi, Z. (2020). “Cooperative 3-d relative localization for uav swarm by fusing uwb with imu and gps,” in 4th International Conference on Artificial Intelligence Applications and Technologies (AIAAT 2020), Shenzhen, China, 7–9 August, 2020 (IOP Publishing).
Queralta, J. P., Almansa, C. M., Schiano, F., Floreano, D., and Westerlund, T. (2020). “Uwb-based system for uav localization in gnss-denied environments: characterization and dataset,” in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE), 4521–4528.
Queralta, J. P., Li, Q., Schiano, F., and Westerlund, T. (2022). “Vio-uwb-based collaborative localization and dense scene reconstruction within heterogeneous multi-robot systems,” in 2022 International Conference on Advanced Robotics and Mechatronics (ICARM) (IEEE), 87–94.
Ridolfi, M., Fontaine, J., Herbruggen, B. V., Joseph, W., Hoebeke, J., and Poorter, E. D. (2021). Uwb anchor nodes self-calibration in nlos conditions: a machine learning and adaptive phy error correction approach. Wirel. Netw. 27, 3007–3023. doi:10.1007/s11276-021-02631-0
Salimpour, S., Keramat, F., Queralta, J. P., and Westerlund, T. (2022a). Decentralized vision-based byzantine agent detection in multi-robot systems with iota smart contracts. arXiv preprint arXiv:2210.03441.
Salimpour, S., Queralta, J. P., and Westerlund, T. (2022b). Self-calibrating anomaly and change detection for autonomous inspection robots. arXiv preprint arXiv:2209.02379.
Sidorenko, J., Schatz, V., Scherer-Negenborn, N., Arens, M., and Hugentobler, U. (2020). Error corrections for ultrawideband ranging. IEEE Trans. Instrum. Meas. 69, 9037–9047. doi:10.1109/tim.2020.2996706
Torrico Morón, P., Salimpour, S., Fu, L., Yu, X., Peña Queralta, J., and Westerlund, T. (2023). Benchmarking uwb-based infrastructure-free positioning and multi-robot relative localization: dataset and characterization. arXiv e-prints , arXiv–2305.
Wang, S., Wu, Z., and Lim, A. (2021). Denoising, outlier/dropout correction, and sensor selection in range-based positioning. IEEE Trans. Instrum. Meas. 70, 1–13. doi:10.1109/tim.2021.3078537
Xianjia, Y., Qingqing, L., Queralta, J. P., Heikkonen, J., and Westerlund, T. (2021a). “Applications of uwb networks and positioning to autonomous robots and industrial systems,” in 2021 10th Mediterranean Conference on Embedded Computing (MECO) (IEEE), 1–6.
Xianjia, Y., Qingqing, L., Queralta, J. P., Heikkonen, J., and Westerlund, T. (2021b). “Cooperative uwb-based localization for outdoors positioning and navigation of uavs aided by ground robots,” in 2021 IEEE International Conference on Autonomous Systems (ICAS) (IEEE), 1–5.
Xu, H., Wang, L., Zhang, Y., Qiu, K., and Shen, S. (2020). “Decentralized visual-inertial-uwb fusion for relative state estimation of aerial swarm,” in 2020 IEEE international conference on robotics and automation (ICRA) (IEEE), 8776–8782.
Yang, J., Zhou, C., Yang, S., Xu, H., and Hu, B. (2017). Anomaly detection based on zone partition for security protection of industrial cyber-physical systems. IEEE Trans. Industrial Electron. 65, 4257–4267. doi:10.1109/tie.2017.2772190
Keywords: multi-robot systems, ultra-wideband (UWB) localization, anomaly detection, multi-robot localization, UWB positioning, relative localization
Citation: Salimpour S, Morón PT, Yu X, Westerlund T and Peña-Queralta J (2023) Exploiting redundancy for UWB anomaly detection in infrastructure-free multi-robot relative localization. Front. Robot. AI 10:1190296. doi: 10.3389/frobt.2023.1190296
Received: 20 March 2023; Accepted: 30 November 2023;
Published: 22 December 2023.
Edited by:
Giovanni Beltrame, Polytechnique Montréal, CanadaCopyright © 2023 Salimpour, Morón, Yu, Westerlund and Peña-Queralta. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Sahar Salimpour, sahars@utu.fi