Quantum retrodiction in Gaussian systems and applications in optomechanics
 Jonas Lammers
Jonas Lammers Klemens Hammerer
Klemens Hammerer- Institute of Theoretical Physics, Leibniz Universität Hannover, Hannover, Germany
What knowledge can be obtained from the record of a continuous measurement about the quantum state of the measured system at the beginning of the measurement? The task of quantum state retrodiction, the inverse of the more common state prediction, is rigorously addressed in quantum measurement theory through retrodictive positive operator-valued measures (POVMs). This introduction to this general framework presents its practical formulation for retrodicting Gaussian quantum states using continuous-time homodyne measurements and applies it to optomechanical systems. We identify and characterize achievable retrodictive POVMs in common optomechanical operating modes with resonant or off-resonant driving fields and specific choices of local oscillator frequencies in homodyne detection. In particular, we demonstrate the possibility of a near-ideal measurement of the quadrature of the mechanical oscillator, giving direct access to the position or momentum distribution of the oscillator at a given time. This forms the basis for complete quantum state tomography, albeit in a destructive manner.
1 Introduction
Continuous measurements (Barchielli and Gregoratti, 2009; Wiseman and Milburn, 2010; Jacobs, 2014) are a powerful tool for the preparation and control of quantum states in open systems and, as such, are of great importance for studies of fundamental physics and applications in quantum technology. Using a continuous measurement record, it is possible to track the quantum trajectory of a system in its Hilbert space in real time, as demonstrated in circuit QED systems (Weber et al., 2016; Hacohen-Gourgy and Martin, 2020), atomic ensembles (Geremia et al., 2003; Kong et al., 2020), and in optomechanics (Hofer and Hammerer, 2017) with micromechanical oscillators (Iwasawa et al., 2013; Wieczorek et al., 2015; Rossi et al., 2018; Thomas et al., 2020; Meng et al., 2022) and levitated nanoparticles (Setter et al., 2018; Liao et al., 2019; Magrini et al., 2021). Determining the conditional quantum state formally requires solving the stochastic Schrödinger or master equation (Barchielli and Gregoratti, 2009; Wiseman and Milburn, 2010; Jacobs, 2014), which is generally a daunting task. In the important case of linear quantum systems, which includes most applications in optomechanics and atomic ensembles, the integration of the Schrödinger equation simplifies the matter greatly and is actually equivalent to classical Kalman filtering (Zhang and Dong, 2022). For this reason, these well-established and powerful tools of classical estimation and control theory are finding increasing application in quantum science (Ma et al., 2022) and are becoming a well-accepted technique for preparing quantum states.
Like any measurement in quantum mechanics, continuous measurements not only determine the post-measurement state of the system but also provide information about its initial prior state. The dual use of continuous measurements for predictive preparation and retrospective analysis of quantum states—as in Figure 1—as well as their combination in what is referred to as quantum state smoothing have received considerable attention in the theoretical literature; see Chantasri et al. (2021) for a review. Retrospective state analysis and smoothing have been experimentally investigated in cavity and circuit QED (Rybarczyk et al., 2015; Tan et al., 2015; Foroozani et al., 2016; Tan et al., 2016; Tan et al., 2017), atomic ensembles (Bao et al., 2020a; Bao et al., 2020b), and optomechanics (Rossi et al., 2018; Kohler et al., 2020; Thomas et al., 2020). However, compared with quantum state preparation by filtering, the applications of these concepts for state readout appear to be less known, although they represent powerful tools for quantum state verification and tomography.

FIGURE 1. Schematic of a continuously monitored quantum system: the output of field a quantum system is combined with a strong local oscillator (LO) to perform homodyne detection from time t0 to t1, producing measurement record
Here, we aim to give a self-contained and accessible introduction to the theory of quantum state retrodiction based on continuous measurements and its formulation for linear quantum systems. The main equations of this theory have been derived before in the context of quantum state smoothing in (Zhang and Mølmer, 2017; Huang and Sarovar, 2018; Warszawski et al., 2020). We focus our presentation on the aspect of state retrodiction and aim to provide operational recipes for this. The general formalism is applied to optomechanical systems, for which we identify and characterize the retrodictive measurements achievable in terms of their positive operator-valued measures (POVMs). In particular, we consider the common regimes for driving the optomechanical cavity on resonance or on its red or blue mechanical sidebands and discuss the role of the local oscillator frequency in homodyne detection. In each case, we determine the realized POVM and compare it to what is achieved in state filtering in the same configuration. A main finding is that red-detuned driving in the resolved-sideband limit allows for an almost perfect quadrature measurement, which is back-action free but completely destructive. Our treatment accounts for imperfections due to thermal noise and detection inefficiencies, and it studies the requirements of quantum cooperativity for performing an efficient state readout. In particular, we determine the concrete filter functions necessary for the post-processing of the photocurrent in order to realize certain POVMs.
The remainder of the article is organized as follows: in Section 2, we recapitulate the description of conditional state preparation through continuous measurement based on stochastic master equations and the equivalent Kalman filter, emphasizing the operational interpretation of the central formulas. In close analogy, we introduce in Section 3 the formalism of retrodictive POVMs and their application to linear quantum systems, where the POVM consists of Gaussian effect operators conveniently characterized by their first and second moments. In Section 4, we illustrate the application of this formalism to the simple case of a decaying cavity. Finally, Section 5 provides a rather detailed modeling of an optomechanical system and derives the retrodictive POVMs in various parameter regimes.
2 Conditional state preparation through continuous measurements
2.1 Conditional master equation
To set the scene and introduce some notation, we start with an overview of the concept of conditional (stochastic) master equations, referring to Wiseman and Milburn (2010) and Jacobs (2014) for detailed derivations. These describe the evolution of continuously monitored quantum systems and are used to prepare conditional (or filtered) quantum states.
We consider an open quantum system governed by Hamiltonian
with the usual Lindblad superoperator
Further information about the state can be gained by monitoring the bath to which the system is coupled (Barchielli and Gregoratti, 2009; Wiseman and Milburn, 2010; Jacobs, 2014). In that case, conditioning the state on the knowledge gained from these indirect measurements is known as filtering (Bouten et al., 2007). We only consider the case of homodyne (and later heterodyne) measurements, as we are ultimately interested in linear dynamics. Other measurement schemes, such as photon counting, would take the conditional dynamics out of this regime. A continuous homodyne detection of the outgoing mode, as sketched in Figure 1, yields a stochastic photocurrent I(t). This can be normalized, Y(t)≔I(t)/α, with some
Here,
with superoperator
The conditional master equation Eq. (3) can be generalized to NL Markovian baths and NC monitored channels,
If each of the NL decay channels is monitored, one has NC = NL and
and each dWj is related to a corresponding homodyne measurement increment dYj as
For details and derivations of this general formalism for describing quantum dynamics conditioned on continuous homodyne detection, we refer once more to Wiseman and Milburn (2010) and Jacobs (2014).
2.2 Linear dynamics
2.2.1 Linear systems
We now apply these concepts to linear systems with Gaussian states governed by the general master equation Eq. (4). We consider a bosonic quantum system with M modes and 2M associated canonical operators
giving rise to a skew-symmetric matrix
In a linear system, the Hamiltonian is, at most, quadratic in the canonical operators while the jump and measurement operators are, at most, linear.
with a symmetric matrix
with
with complex
2.2.2 Gaussian states
A Gaussian state ρ (Wang et al., 2007; Olivares, 2012; Weedbrook et al., 2012; Adesso et al., 2014; Genoni et al., 2016) is, by definition, any state with a Gaussian phase-space distribution. Gaussian states are fully determined by their first- and second-order cumulants (Ivan et al., 2012): a vector of means
and a symmetric covariance matrix
All higher-order cumulants are identically zero, so knowing rρ and Vρ determines the full Wigner function of ρ and thus also ρ itself. Note that the normalization of Vρ chosen in Eq. 14 means that diagonal elements correspond to twice the variance, such as
The assumption of a Gaussian initial state ρ(t0) is both convenient and reasonable. Since Gaussian operators have the tremendously useful property of remaining Gaussian under linear dynamics, they are easy to work with. Additionally, consideration of only Gaussian states is justified since Gaussian measurements (Jacobs and Steck, 2006; Van Handel, 2009) and Gaussian baths (Zurek et al., 1993) tend to “Gaussify” the state of the system. Mathematically, this means that, if we start with an arbitrary initial state ρ(t0), higher-order cumulants of order
It is known (Barnett and Radmore, 1997; Zhang and Mølmer, 2017) that a master equation for ρ can be directly translated into differential equations for the means and covariance matrix, as detailed in Supplementary Appendix SC. One finds for a Gaussian state
with the drift matrix
comprising unitary and dissipative terms. If we reintroduce the homodyne signal actually measured,
we can write
with the conditional drift matrix
In Eq. 18, the measurement current dY(t) enters the evolution of the conditional means only through multiplication with the measurement matrices A and B. Hence, reducing the detection efficiency corresponding to A, B → 0 causes the stochastic increment to disappear as it should. Note that the covariance matrix Vρ(t) twice enters Eq. 18, once through the drift matrix Mρ(t) and once directly coupled to dY(t). The latter term has the effect that a large variance, which corresponds to great uncertainty about the state, boosts the effect that each bit of gathered information has on the evolution of the conditional means.
The covariance matrix satisfies the deterministic equation
with diffusion matrix
The evolution of Vρ(t) is independent of the means rρ(t) or any other cumulants, which is a peculiarity of Gaussian dynamics. However, while it is independent of the measurement record and not a stochastic equation, it does depend on the measurement device through matrices A, B. This is reasonable, since the information that is gained from observations of the system conditions the state, thus reducing its uncertainty.
In the following, we assume stable dynamics, which makes the covariance matrix collapse to some steady state matrix
where
Because
Here, we see that the means (and thus the whole state) do not depend on the entire continuous measurement record
2.3 Interpretation and discussion
2.3.1 Conditional quantum states
We now want to remind the reader of how the conditional Gaussian quantum state should be interpreted and what its preparation via continuous measurements means from an operational perspective.
The means rρ(t) and covariance matrix Vρ(t) determined from Eqs 18 and (20) fully determine the density matrix for the conditional state. It is instructive to note that the Gaussian density matrix is always of the form (Giedke, 2001; Fiurášek and Mišta, 2007)
Here,
Therefore, predicting a conditional quantum state based on a continuous measurement during time interval [t0, t] starting from a known Gaussian initial state simply means calculating the means according to Eq. 23. Knowing those numbers, the prediction is that a hypothetical projective measurement of canonical operators at time t will give results with these same averages, and second moments according to the covariance matrix Vρ(t) which depends only on the initial condition. Statistics of any other measurement can be determined from Eq. 24. For stable dynamics, dependencies on initial conditions will disappear in the long run, and the covariance matrix will become time-independent. The wave packet will then have a fixed shape and undergo stochastic motion in phase space with positions known from the photocurrent.
The quality of the conditional preparation can be judged from the purity
Unobserved dissipation tends to reduce the purity, while monitoring the dynamics and conditioning the state increases the purity. Ideally, perfect detection allows preparation of pure states, which are the only states with
2.3.2 Mode functions
We mentioned at the end of Section 2 B 2 that the kernels in the forward and backward integrals of the means in Eq. 23 and Eq. 46 each select sets of temporal modes. Recall that the means
Each (unnormalized) temporal mode function
to enter the evolution of rj(t). The interpretation of this is as follows: the time integral of extracts from the continuous quadrature-measurement current Yk(τ) a single number Xj(t), which can be considered the result of the measurement of the quadrature of temporal modes with envelope functions
3 State verification using retrodictive POVMs
3.1 Retrodictive POVMs
In the previous section, we have seen how to use continuous monitoring to prepare conditional states (filtering). We will now show how to interpret the measurement record instead as an instantaneous POVM (Nielsen and Chuang, 2010; Wiseman and Milburn, 2010; Jacobs, 2014). To fully appreciate this result, let us first remind the reader about POVMs and general measurements in quantum mechanics.
3.1.1 Positive operator-valued measures
A general measurement of a given quantum state ρ is always composed of i) possible measurement outcomes
with the positive effect operator
3.1.2 Continuous monitoring as POVM measurement
To see how to reinterpret the measurement record, we again consider the simple system governed by the master Equation 3 and an evolution from t0 to t1 that produced some record
we find that it generates equivalent but non-trace-preserving dynamics,
denoted by a tilde. The trace of the conditional state now carries additional information: the probability for
If we plug Eq. 30 into this expression and include an identity operator
where
which will play a crucial role throughout this article. With this definition, Eq. 33 can be rewritten as
A comparison of Eq. 35 with Eq. 28 shows that
3.2 Backward effect equation
Just as the conditional quantum state, the effect operators
For a given system dynamics, the effect operators are backpropagated by a channel adjoint to that of the state. More specifically, for continuously monitored systems governed by conditional master Equation 29, the adjoint conditional effect equation, which takes some effect operator
with adjoint Lindblad superoperator
Comparing the effect Equation 36 to the forward master Equation 29, we observe the following differences. The sign of the Hamiltonian changes, which we expect from the usual time-reversal in closed systems. The Lindblad superoperator
Solving Eq. 36 for
The unnormalized effect equation generalizing Eq. 36 to multiple observed and unobserved channels reads
Since we only consider conditional dynamics from now on, we will drop the subscript
3.3 Linear dynamics and Gaussian POVMs
As in Section 2 B, we focus our approach on linear systems. Like density operators, we can represent effect operators in terms of phase space distributions, which allow us to translate the effect equation into differential equations for the cumulants. We must be more careful with the definition of statistical quantities, as
where the expectation value ⟨⋅⟩E is explicitly normalized and is defined as long as
Gaussian effect operators and their time dynamics have been treated recently by Zhang and Mølmer (2017), Huang and Sarovar (2018), and Warszawski et al. (2020). Since we aim to keep our treatment self-contained, we reproduce a number of the results (in particular on the Gaussian equations of motion of the effect operator) presented there. Our derivation and presentation complements these previous ones with further details and background. In particular, it was not apparent to us if the restriction to Gaussian effect operators is justified as it is for quantum states (cf. the discussion in Section 2 B 2). In Supplementary Appendix SC7, we consider the evolution of general effect operators and show that it is very similar to that of general quantum states. Hence, a notion of backward stability analogous to that of quantum states can be applied.
To obtain the evolution of the means and covariance matrix associated with
where the second line compensates for the replacement of
with the conditional backward drift matrix
The deterministic backward Riccati equation for the covariance matrix is similar to Eq. 20,
and clearly shows the importance of continuous observations for retrodiction. Without observations (i. e., when A = B = 0), the drift matrices would be equal up to sign Mρ(t) = −ME(t) = Q. At the same time, the quadratic Riccati equations for the respective covariance matrices would turn into linear Lyapunov equations. Assuming stable forward dynamics with a positive steady state solution
would preclude stable backward dynamics: there cannot simultaneously be a positive asymptotic covariance matrix
Only the presence of a sufficiently large quadratic ATA-term in Eq. 43, corresponding to sufficiently efficient observations, allows us to find an asymptotic solution
Assuming stable backward dynamics that make any Gaussian effect operator with VE(t1) collapse to
where the integral is a backward Itô integral as explained in Supplementary Appendix SB. The negative eigenvalues of
3.4 Interpretation of retrodictive POVMs
Analogous to Eq. 24, the POVM realized at time t in retrodiction based on continuous homodyne detection during some time interval [t, t1] can be written as
Here,
Reduced purity means additional uncertainty and thus lower resolution of the measurement. We will see in the examples in Sections 4 and 5 that the purity of retrodicted effect operators decreases quickly when the detection efficiency is low or when there is coupling to unobserved baths. Quite generally, for systems subject to continuous time measurements with a measurement rate Γ (including losses) competing with other decoherence processes happening at rate γ, the dynamics of both conditional density and effect matrix crucially depend on a quantum cooperativity parameter Cq = Γ/γ. The regime Cq > 1 signifies the possibility of producing quantum-limited POVMs in retrodiction just as it allows pure conditional quantum states in prediction. In Section 5, we will prove this statement in great detail for continuous measurements on optomechanical systems.
While it is possible to perform quantum limited POVMs corresponding to projections on pure states, this cannot be used as a means of preparing pure quantum states. The “collapsed” posterior state is physically not realized since retrodictive POVMs are destructive: once all information necessary for realizing the POVM has been gathered, the system’s state has already evolved into something different, the best description of which is just the conditional quantum state. It does not make sense to consider the posterior state after the measurement just as it is useless to ask for the state of a photon after photo-detection.
Repeated measurement of a POVM (47) on identically prepared systems in state ρ0 will map out the probability distribution
This is the information on the state ρ0, which is directly accessible via retrodictive POVMs. Other relevant aspects regarding the quantum state may be inferred from such information, possibly collected for different POVMs by changing the dynamics—and with it, the equations of motion for
One may, for example, be interested in reconstructing the density matrix ρ0 itself, which corresponds to the problem of quantum state tomography. Recapitulating the methods available to perform this task is beyond the scope of this article, and we refer to the literature in this field (Paris and Řeháček, 2004; Lvovsky and Raymer, 2009). We just state two particularly simple cases where the heterodyne POVM directly provides the Mandel Q-function of the quantum state,
It is worth emphasizing that the Gaussian POVMs realized by the linear dynamics considered here may well be applied to non-Gaussian states. No assumption of the initial state ρ0 went into the derivation of the equations of motions (41) and (43) for the Gaussian operator
4 Basic examples
In this section, we consider two basic but illustrative examples of the formalism developed so far; these will provide a firm basis for the more serious application to optomechanical systems in Section 5.
4.1 Monitoring a decaying cavity
Let us start with the simple example of a decaying cavity undergoing homodyne detection (Figure 2). This example was used by Wiseman (1996) to illustrate the interpretation of quantum trajectories in measurement theory as retrodictive POVM elements. Using operator algebra, he showed that, with an ideal detector and infinite observation time, one can perform a projective measurement of the initial state of the cavity onto a quadrature eigenstate. Using the formalism developed in the previous sections, we will treat the same setup here for homodyne detection with efficiency η. For ideal detection η → 1, we recover the result of Wiseman.
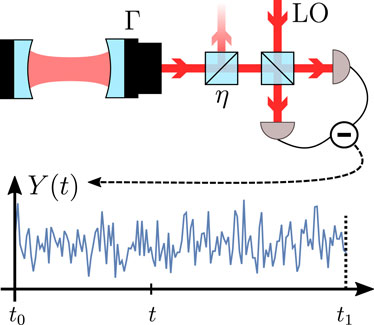
FIGURE 2. Schematic of a freely decaying cavity monitored from time t0 to t1. Light leaving the cavity at rate Γ is superposed on a balanced beam-splitter with a strong local oscillator (LO). Two photodetectors monitor the output ports and their photocurrents are subtracted to yield a time-continuous homodyne measurement signal Y(t). Imperfect detection is modeled as photon loss induced by a second beam-splitter which only transmits a fraction η of the signal light.
4.1.1 Conditional state evolution
We consider an ideal freely damped cavity with decay rate Γ. The output is mixed with a strong local oscillator with adjustable relative phase ϕ to perform homodyne detection with efficiency η ∈ [0, 1]. For later reference, we first study the corresponding stochastic master equation for the conditional state of the intra-cavity field (Wiseman, 1996). In a frame rotating at the cavity frequency, this is
where
with
Spelling out Eqs 15 and (20) for drρ and
and
The steady-state covariance matrix
Computing the purity
This insight is important: it shows that the covariance matrix and purity alone do not let us judge the effectiveness of a given preparation (or retrodiction) scheme. If the unconditional dynamics produce some mixed steady state, we can increase our knowledge by monitoring the output. Over long periods, the conditional dynamics will produce a state with a fixed covariance matrix and measurement-dependent means that move around phase space, such that the averaged conditional dynamics agree with the unconditional dynamics. However, if the unconditional dynamics already yield a quantum-limited state (such as the vacuum in the present example), then there is nothing to be gained from observing the output. These statements apply to both quantum states and effect operators.
While the observations cannot aid (long-term) state preparation, we will now see how they let us infer information about the initial state of the cavity.
4.1.2 Retrodiction of POVM elements
The equation adjoint to Eq. 48 for the backward-propagating POVM element
and
We solve
which entails constant covariance,
We can now also derive the filter functions or temporal modes which must be extracted from the photocurrent. Plugging the asymptotic variance
The solution to this equation is given by
for t ≤ t1, so the final value xE(t1) is exponentially damped, and, far into the past, the mean
4.2 Beam-splitter vs squeezing interaction
We will now examine why we can prepare only a coherent state (the vacuum) but can measure squeezed states. This is due to the beam-splitter (BS) coupling between the cavity and the field outside,
where
This is obviously unrealistic for our simple cavity, but we will encounter the TMS interaction again in optomechanical systems, so it is worthwhile understanding the effect this has on the dynamics.
This yields equations of motion for the means and (co)variances of the conditional state,
and
which are exactly the same as the backward Eqs 54 and 55 for the BS interaction. So while

TABLE 1. Summary of the predicted quantum state and the retrodictive POVM realized for a single mode coupled via a beam-splitter or a two-mode squeezing interaction to the monitoring field.
5 Conditional state preparation and verification in optomechanics
The illustrative examples studied in the previous sections provide the background for the main application of the formalism to time-continuous measurements on optomechanical systems (Chen, 2013; Aspelmeyer et al., 2014). The system of interest is a single mode of a mechanical oscillator, such as a membrane depicted in Figure 3, which couples to the light field inside a resonantly driven cavity. The light escaping the cavity is then mixed with a local oscillator to perform heterodyne detection. We will be interested in the weak coupling limit of optomechanics, where the cavity can be adiabatically eliminated and where the time continuous measurement effectively concerns the mechanical system only. It is important to note that this weak coupling limit does not exclude the regime of strong quantum cooperativity where the measurement back-action noise process effectively becomes stronger than all other noise processes acting on the oscillator. Quantum cooperativities of the order of 100 have been demonstrated in recent optomechanical systems (Rossi et al., 2018). It is clear that the tools of quantum state pre- and retrodiction become especially powerful in such a regime.
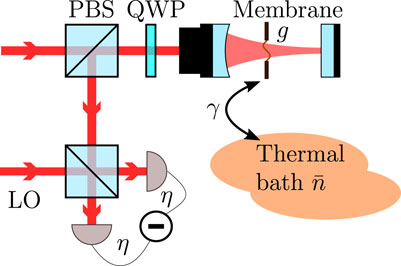
FIGURE 3. Schematic of a micromechanical membrane coupled to a driven cavity with coupling strength g. Before entering the cavity, the linearly polarized driving field is transmitted through a polarizing beam-splitter (PBS) and quarter-wave plate (QWP). After interaction with the cavity and membrane, the outgoing light again passes the QWP, such that it becomes orthogonally polarized to the incoming light. It is reflected off the PBS and superposed on a second beam-splitter with a strong local oscillator (LO) to perform homodyne or heterodyne detection with detection efficiency η. The membrane is additionally coupled to a thermal bath with rate γ and mean phonon number
The adiabatic limit of the conditional optomechanical master equation has been treated in great detail in Hofer and Hammerer (2015). We summarize here the main aspects and then apply it to discuss pre- and retrodiction.
5.1 Optomechanical setup
We consider a mechanical mode with frequency Ωm coupled to a cavity with resonance frequency ωc, driven by a strong coherent field with frequency ω0. We move to a rotating frame with respect to the drive ω0 and assume the generated intracavity amplitude is large so that we can linearize the radiation pressure interaction. Following standard treatment (Aspelmeyer et al., 2014), this yields
where
The cavity field leaks out at a full width at half maximum (FWHM) decay rate κ. The (unconditional) master equation of the joint state ρmc of the mechanical and cavity mode reads
where we also include a thermal bath,
with mean phonon number
We monitor the field that leaks from the cavity using homodyne or heterodyne detection. As usual, the outgoing field is combined on a balanced beam-splitter with a strong local oscillator, and the difference of the measured intensities in the two output beams is the measurement current, depicted at the bottom left of Figure 3. As compared to the conditional master equation Eq. (48) studied in Section 4 on the decaying cavity, we consider here a slightly more general setup where the local oscillator frequency ωlo may be detuned from the driving frequency ω0, captured by Δlo = ωlo − ω0. This realizes a measurement of the outgoing field quadrature operator
where η ∈ [0, 1] is the detection efficiency.
We would like an effective master equation for the mechanics alone. To this end, one can start from the combined master equation Eq. (71) and move to an interaction picture with respect to
5.2 Optomechanical interaction
The linearized radiation-pressure interaction is given by the last term in Eq.68a. The interaction decomposes into two terms: i) a beam-splitter (BS) coupling
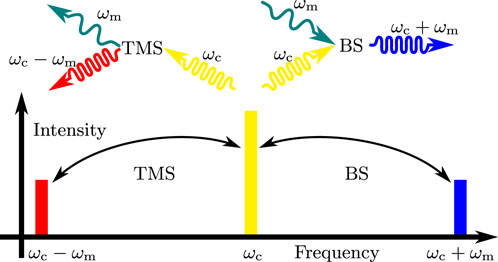
FIGURE 4. Top: Schematic conversion processes occurring in the optomechanical setup depicted in Figure 3 that scatter cavity photons at frequency ωc into the outgoing sidebands while creating or annihilating a mechanical phonon at frequency Ωm. Bottom: Spectrum of outgoing light (not to scale). As discussed in Section V B, the linearized optomechanical interaction facilitates two processes: the beam-splitter interaction converts a cavity photon into a phonon and an outgoing photon in the lower (red) sideband at ωc − Ωm. Two-mode squeezing combines a cavity photon and a phonon to produce an outgoing photon in the upper (blue) sideband at ωc + Ωm.
As we have seen in the initial example in Section 4, the entangling TMS interaction enhances our ability to prepare a conditional mechanical state. Because the outgoing light is entangled with the mechanics, performing a quantum-limited squeezed detection will also project the oscillator onto a squeezed state. On the other hand, the BS interaction generates light with the mechanical state swapped onto it. Observing it allows us to determine what the state was before the interaction but will not enable the preparation of squeezed states. For retrodiction, the situation is reversed. Extracting information about the system in the past from BS light produces squeezed effect operators (sharp measurements) on the past state, while entangled TMS light lets us at best retrodict coherent effect operators. Thus TMS (blue drive) enhances our ability to prepare while the BS interaction (red drive) enhances our ability to retrodict.
5.3 Master equation of the mechanics
In Hofer and Hammerer (2015) and Hofer and Hammerer (2017), the master equation Eq. (71) is turned into an effective evolution equation for the mechanical state ρm ≡ ρ through adiabatic elimination of the cavity mode. Since the result is not a proper Lindblad master equation, a rotating wave approximation is needed for which we integrate the dynamics over a short time,
We are interested here in the case of mechanical oscillators with high quality factors Q = Ωm/γ, where Ωm is much larger than other system frequencies set by the optomechanical interaction and decoherence—
with the time-dependent measurement operator
The effective mechanical frequency
results from a shift of Ωm due to the optical spring effect, and the rates
are the usual Stokes and anti-Stokes rates known from sideband cooling. From these, we can define two effective cooperativities
in terms of the classical cooperativity
Each C± compares the rate of the respective (anti-)Stokes process to the incoherent coupling rate of the thermal bath. In the regime κ ≫Ωm of a broad cavity (Authors Anonymous, 2023c) and assuming κ ≫Δc, the cooperativities reduce to the classical cooperativity, C± ≈ Ccl. As an example of the orders of magnitude involved here, consider Rossi et al. (2018), who realized C ≈ Ccl ∼ 107 and for
To obtain a proper master equation from Eq. 73a, we must still perform the integral over the measurement term, which depends on the choice of Δlo. However, Eq. 73a already illustrates the point we made in Section 5 B: detuning the driving field affects the optomechanical interaction. Driving on resonance Δc = 0, TMS and BS interaction occur with equal strength, reflected by Γ+ = Γ−. A blue drive, Δc = Ωm, enhances TMS and causes Γ+ > Γ−, while a red drive, Δc = −Ωm, enhances the BS interaction and causes Γ− > Γ+. Additionally, we can tune the local oscillator either to resonantly detect at the driving frequency Δlo = 0 or to either the blue or red sideband Δlo = ±Ωeff. We will explore these different dynamics step by step, starting with a resonant drive and resonant detection in the following section, then considering detection of the sidebands in Section 5 E, and finally treating an off-resonant drive with sideband detection in Section 5 F.
5.4 Drive and detect on resonance
We start by exploring a cavity driven on resonance, Δc = 0, so we find equal rates Γ+ = Γ−≕Γ and equal cooperativities C≔C+ = C− with
and Ωeff = Ωm. The first detection scheme we consider is homodyne detection on resonance, Δlo = 0. Plugging this into Eq. 73a yields the measurement operator
with
with the coarse-grained Wiener increments
It turns out that these are approximately normalized,
with independent Wiener increments dWc(t) and dWs(t).
5.4.1 Conditional state evolution
Using the notation of Section 2 B, we find
in terms of the cooperativity Eq. 79. The purity is simply the inverse of the variance,
The degenerate eigenvalue λρ is always real and is negative so long as γ or ηΓ are non-zero and thus guarantee stable dynamics. We obtain the mode functions with which the cosine and sine components of the measurement current are Itô-integrated in Eq. 23 by evaluating the kernel
We find that fxs(t) = fpc(t) = 0 and
which shows that the cosine and sine components of the photocurrent each only enter the corresponding (
In the following we assume that ηC ≫ 1 and
we find the variance
plotted in Figure 5A, and the mode function damping rate is given by
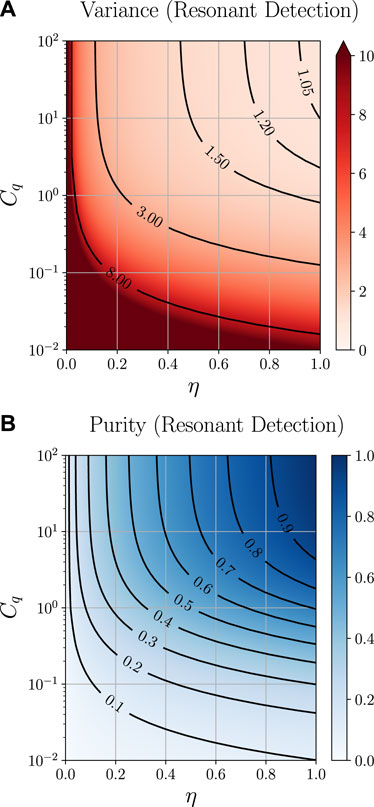
FIGURE 5. (A) Log-linear plot of the steady state variance
The equal variances in Eq. 85 and vanishing covariance indicate that we prepare a thermal steady state, which approaches a pure coherent state as η → 1 and Cq → ∞, as we see from the limiting expression Eq. 90 and also from the purity plot in Figure 5B. The exponent λρ in Eqs 86 and (91) determines how fast the mode functions in Eq. 88 decay, and thereby the “memory time” of the conditional state. In the regime where
5.4.2 Retrodiction of POVM elements
We obtain the asymptotic effect operator by solving the Riccati equation resulting from Eq. 43. Again
so we find effect operators with equal variance, which corresponds to a POVM realizing a heterodyne measurement.
The asymptotic variance of the retrodicted effect operator is strictly greater than the asymptotic variance of the conditional state
with the strictly greater variance
For both preparation and retrodiction, we see that we can never measure or prepare states with sub-shot noise resolution. In fact, in the ideal limit of perfect detection η → 1 and large cooperativity Cq → ∞, both
5.5 Drive on resonance, detect sidebands
We now detune the local oscillator with respect to the driving laser Δlo = ±Ωm to resolve the information contained in the sidebands located at ωc ±Ωm. Recalling the general equation Eq. (73), we see that detecting the red sideband Δlo = −Ωm makes
Resonant detection of the blue sideband with Δlo = Ωm analogously makes
Thus, we expect after coarse-graining to better observe an effect of the TMS interaction on the red sideband and of the BS interaction on the blue sideband. To evaluate the integrals in Eq. 73a, we introduce
analogous to Eq. 83a, which separates the photocurrent oscillating at twice the mechanical frequency from its DC component (at the given sideband frequency). As before, these are approximately normalized and independent of one another (up to
5.5.1 Detecting the red sideband
We first consider the local oscillator tuned to the red sideband Δlo = −Ωm. This yields the coarse-grained master equation
Analogous to the case of resonant detection, we can use the Gaussian formalism to compute the conditional steady state variances,
which, for
To find the corresponding Gaussian effect operators realizable through retrodiction, we could translate the full master equation above to an effect equation and then apply the Gaussian formalism as before. Instead, we take the shortcut of directly reading off the Riccati equation Eq. (43) from the corresponding Riccati equation of the conditional state. Solving it yields the asymptotic variances
which for
Considering the ideal limit η → 1 and Cq → ∞, we find
for the effect operator, so at best we retrodict POVMs that project onto coherent states. On the other hand, we find
for the conditional steady state, showing that we can, in principle, prepare squeezed states. Necessary conditions for going below shot noise in the preparation are Cq > 1 and η > 1/2 since
which is confirmed by the plot of
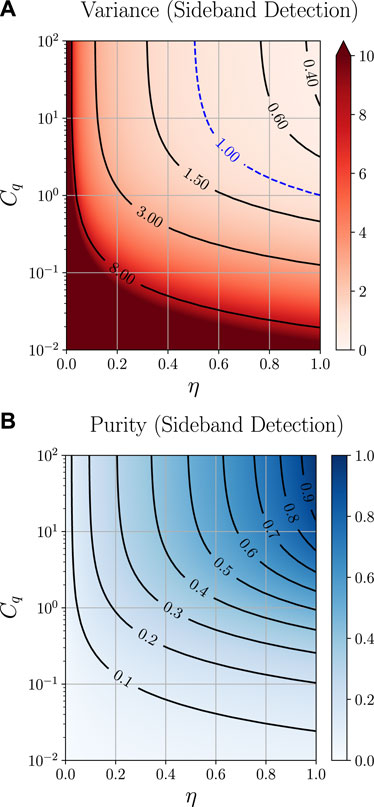
FIGURE 6. (A) Linear-logarithmic plot of the approximate steady state variances
5.5.2 Detecting the blue sideband
Tuning the local oscillator to the blue sideband, we find for Δlo = +Ωm the master equation
which asymptotically results in a conditional state with variances
which for
We see here that, in the limit of η → 1 and Cq → ∞, the variances approach
so we can at best prepare coherent states.
To find the corresponding effect operators, we again translate the forward Riccati equation directly to a corresponding backward equation. This yields the asymptotic variances
which for
Considering the ideal limit η → 1 and Cq → ∞, we see that the asymptotic effect operators can in principle project onto squeezed states
provided Cq > 1 and η > 1/2 since
Since both the limiting
These results are summarized in Table 2: for large quantum cooperativity and resonant drive, homodyne detection of the blue (red) sideband generates coherent (squeezed) conditional states and squeezed (coherent) retrodictive POVMs. This conforms with the expectation that blue (red) sideband photons have been generated via a beam-splitter (two-mode squeezing) interaction, as discussed in Section 5 B. Thus, these two cases perform qualitatively similarly to the basic examples studied in Section 4 and Table I. There is, of course, a significant quantitative difference as, for example, the squeezed POVM realized by resonant drive exhibits a noise reduction by 66% only. A perfect quadrature measurement, such as found in Section 4, would require infinite squeezing. In order to achieve this, the driving field has to be detuned from cavity resonance, as will be discussed next.
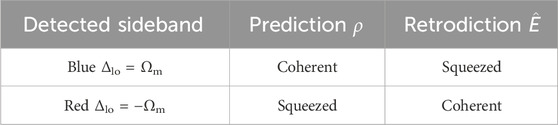
TABLE 2. Conditional states and retrodictive POVMs generated by resonant drive and homodyne detection of the blue or red sideband.
5.6 Off-resonant drive
The case of an off-resonant drive, Δc ≠ 0, is also very relevant in experiments—for example, performing sideband cooling or preparing squeezed mechanical states in pulsed schemes (Hofer and Hammerer, 2017). Detuning also enables richer retrodictive dynamics since it allows selective enhancement and suppression of the Stokes and anti-Stokes rates Γ± and, thus, the BS and TMS components of the optomechanical interaction. Of course, it must be remembered that a detuned drive requires more power to maintain the same level of linear coupling.
To analyze the effects of non-zero detuning, we need to return to the original coarse-grained master equation Eq. (73). Evaluating the integral over the measurement term for homodyne detection of the carrier or sideband frequencies proceeds analogously to the previous sections. We only need to remember that the sidebands are now located at ωc ±Ωeff with the effective frequency Ωeff from Eq. 74a. The Stokes and anti-Stokes rates Γ± from Eq. 75 are no longer equal to a single rate
but can be written as
For a blue-detuned drive, Δc > 0 such that Γ+ ≥Γ− + γ, the mechanical dynamics are unstable. Since we are interested in stationary states obtained through continuous driving and observation, we will thus consider only a red-detuned drive, Δc < 0, in the following. We see that with Δc = −Ωm, we can enhance Γ− by a factor
Analogous to the previous sections, we solve the Riccati equations for the asymptotic covariance matrices of filtered Gaussian states and retrodicted POVM elements. We will only consider
where the “bare” cooperativities C and Cq are the same as for a resonant drive considered in the previous sections. The solution for a conditional Gaussian steady state prepared by observing the red sideband Δlo = −Ωeff then reads
Here, we see in the broad cavity regime Ωm/κ ≪ 1, where C− ≈ C+ ≈ C, that the variance is just given by what one finds by driving on resonance. Thus, the minimal variance obtained for η = 1 and Cq → ∞ will be given by
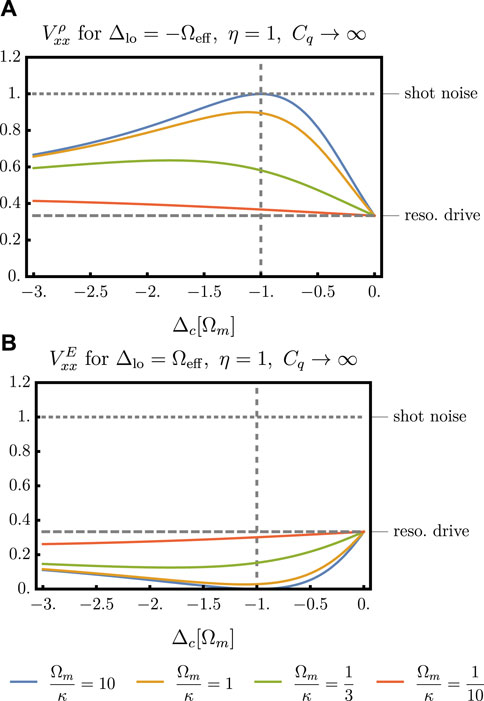
FIGURE 7. (A) Conditional steady state variance
We can compare these results to the asymptotic variance of a Gaussian effect operator retrodicted by observing the blue sideband, Δlo = Ωeff, which reads
Here, we find that, to retrodict POVMs with sub-shot noise resolution
and thus necessarily η > 1/2 but also
Thus, a detuned drive in the sideband-resolved regime allows retrodiction of POVMs that beat the shot noise limit even for sub-unit quantum cooperativities. In fact, whenever Ωm/κ ≫ 1 such that
as can also be seen in Figure 8, where we plot the achievable variances for conservative values of Cq = 1/2 and η = 0.77. These results show that, with an off-resonant (red-detuned) drive and using only continuous measurements, measurement is possible with sub-shot noise variance limited only by the detection efficiency η.
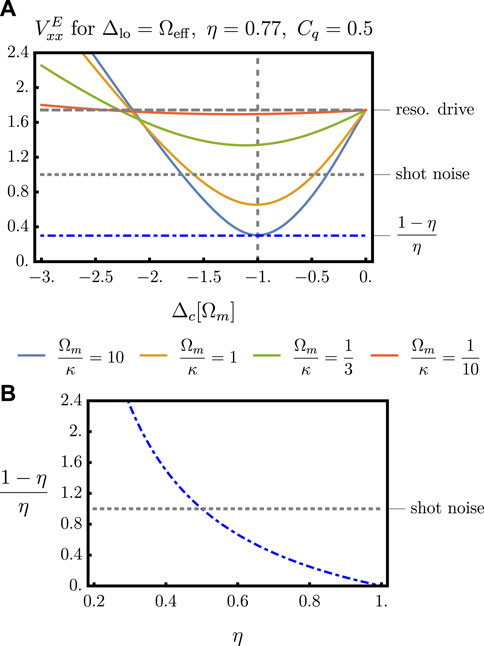
FIGURE 8. (A) The asymptotic variance
In summary, it is possible to perform quadrature measurements of the mechanical state with sub-shot noise variance through continuous monitoring of the cavity output. By using a red-detuned cavity drive and sufficiently efficient homodyne detection of the blue sideband of the output, one achieves a squeezed retrodictive POVM realizing a quadrature measurement for the past mechanical state. In the resolved sideband limit, the quality of the quadrature measurement is essentially only limited by the detection efficiency and does not require a quantum cooperativity larger than 1.
6 Conclusion and outlook
We have given here a self-contained introduction to the theory of retrodictive POVMs, demonstrating the potential to retrieve information about the initial quantum state of a system based on the outcomes of a continuous measurement process. The general formalism has been illustrated in detail for linear quantum systems and applied to realistic models of optomechanical systems.
The application of our theoretical framework to optomechanics has revealed promising avenues for achieving retrodictive state analysis. By characterizing achievable retrodictive POVMs in various optomechanical operating modes, such as resonant and off-resonant driving fields, we have illustrated the potential for precise retrodictive measurements of mechanical oscillators. Notably, our findings reveal the possibility of nearly ideal quadrature measurements, offering direct access to the position or momentum distribution of mechanical oscillators at specific time instances. This advance opens doors to novel possibilities in quantum state tomography and of non-Gaussian states, albeit with the caveat of being inherently destructive.
We hope that this presentation will facilitate and advance the use of retrodictive POVMs in other linear quantum systems beyond optomechanics. Extending the formalism to more complex and nonlinear systems presents an intriguing challenge. As quantum technology continues to advance, the insights gained from this work will contribute to the expanding toolkit of quantum state analysis and manipulation.
We thank Klaus Mølmer, Albert Schließer, Stefan Danilishin, Sebastian Hofer, David Reeb, Reinhard Werner, and Lars Dammeier for discussions on this topic. We acknowledge funding by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) through Project-ID 274200144–SFB 1227 (projects A06) and Project-ID 390837967–EXC 2123.
Data availability statement
The original contributions presented in the study are included in the article/Supplementary Material; further inquiries can be directed to the corresponding author.
Author contributions
JL: writing–original draft and writing–review and editing. KH: writing–original draft and writing–review and editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. This research was funded by Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) through Project-ID 274200144–SFB 1227 (projects A06) and Project-ID 390837967–EXC 2123.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/frqst.2023.1294905/full#supplementary-material
References
Adesso, G., Ragy, S., and Lee, A. R. (2014). Continuous variable quantum information: Gaussian states and beyond. Open Syst. Inf. Dyn. 21, 1440001. doi:10.1142/s1230161214400010
Aspelmeyer, M., Kippenberg, T. J., and Marquardt, F. (2014). Cavity optomechanics. Rev. Mod. Phys. 86, 1391–1452. doi:10.1103/revmodphys.86.1391
Authors Anonymous (2023a). Hence α = (δI(t)2/δt)1/2with δt chosen as small as possible without violating the assumption that the noise is indeed white, i. e., has independent increments from one moment to the next.
Authors Anonymous (2023b). Let V = ST (T⊕T)S be the symplectic diagonalization of the covariance matrix V, that is S is a symplectic matrix with STσS = σ and T is a diagonal matrix with entries τk. Then Γ = S−1(K⊕K)(S−1)T where K is a diagonal matrix with entries κk such that τk = (1 − e−κk)−1.
Authors Anonymous (2023c). We assumed Ωm ≫ g2/κ for the rotating wave approximation which imposes Ωm/κ ≫ (g/κ)2. However, we also used g/κ ≪ 1 to eliminate the cavity so (g/κ)2 is a small parameter and the derivation holds for a range of linewidths from the sideband-resolved (κ ≪Ωm) to the broad cavity regime (κ ≫Ωm).
Authors Anonymous (2023d). When computing dˆE (t) of the effect operator in [47] it is important to reintroduce the initial time which was set to zero by Wiseman, and to take the derivative with respect to this time.
Bao, H., Duan, J., Jin, S., Lu, X., Li, P., Qu, W., et al. (2020a). Spin squeezing of 1011 atoms by prediction and retrodiction measurements. Nature 581, 159–163. doi:10.1038/s41586-020-2243-7
Bao, H., Jin, S., Duan, J., Jia, S., Mølmer, K., Shen, H., et al. (2020b). Retrodiction beyond the Heisenberg uncertainty relation. Nat. Commun. 11, 5658. doi:10.1038/s41467-020-19495-1
Barchielli, A., and Gregoratti, M. (2009). Quantum trajectories and measurements in continuous time, lecture notes in physics. Berlin, Heidelberg: Springer Berlin Heidelberg.
Barnett, S., and Radmore, P. (1997). Methods in theoretical quantum Optics. Oxford: Oxford University Press.
Barnett, S. M., Pegg, D. T., and Jeffers, J. (2000). Bayes’ theorem and quantum retrodiction. J. Mod. Opt. 47, 1779–1789. doi:10.1080/09500340008232431
Barnett, S. M., Pegg, D. T., Jeffers, J., and Jedrkiewicz, O. (2001). Master equation for retrodiction of quantum communication signals. Phys. Rev. Lett. 86, 2455–2458. doi:10.1103/physrevlett.86.2455
Bouten, L., Van Handel, R., and James, M. R. (2007). An introduction to quantum filtering. SIAM J. Control Optim. 46, 2199–2241. doi:10.1137/060651239
Chantasri, A., Guevara, I., Laverick, K. T., and Wiseman, H. M. (2021). Unifying theory of quantum state estimation using past and future information. Phys. Rep. 930, 1–40. doi:10.1016/j.physrep.2021.07.003
Chen, Y. (2013). Macroscopic quantum mechanics: theory and experimental concepts of optomechanics. J. Phys. B Atomic, Mol. Opt. Phys. 46, 104001. doi:10.1088/0953-4075/46/10/104001
Eisert, J., and Wolf, M. M. (2007). “Gaussian quantum channels,” in Quantum information with continuous variables of atoms and light (London, UK: Imperial College Press), 23–42.
Fiurášek, J., and Mišta, L. (2007). Gaussian localizable entanglement. Phys. Rev. 75, 060302. doi:10.1103/PhysRevA.75.060302
Foroozani, N., Naghiloo, M., Tan, D., Mølmer, K., and Murch, K. W. (2016). Correlations of the time dependent signal and the state of a continuously monitored quantum system. Phys. Rev. Lett. 116, 110401. doi:10.1103/physrevlett.116.110401
Gammelmark, S., Julsgaard, B., and Mølmer, K. (2013). Past quantum states of a monitored system. Phys. Rev. Lett. 111, 160401. doi:10.1103/physrevlett.111.160401
Gardiner, C. (2009). Stochastic methods: a handbook for the natural and social sciences. Berlin, Germany: Springer-Verlag Berlin Heidelberg.
Gardiner, C., and Zoller, P. (2010). “Springer series in synergetics,” in Quantum noise: a handbook of markovian and non-markovian quantum stochastic methods with applications to quantum Optics (Berlin, Germany: Springer).
Genoni, M. G., Lami, L., and Serafini, A. (2016). Conditional and unconditional Gaussian quantum dynamics. Contemp. Phys. 57, 331–349. doi:10.1080/00107514.2015.1125624
Geremia, J., Stockton, J. K., Doherty, A. C., and Mabuchi, H. (2003). Quantum kalman filtering and the heisenberg limit in atomic magnetometry. Phys. Rev. Lett. 91, 250801. doi:10.1103/physrevlett.91.250801
Giedke, G. (2001). Quantum information and continuous variable systems. Ph.D. thesis. Berlin, Germany: Springer.
Guevara, I., and Wiseman, H. (2015). Quantum state smoothing. Phys. Rev. Lett. 115, 180407. doi:10.1103/physrevlett.115.180407
Hacohen-Gourgy, S., and Martin, L. S. (2020). Continuous measurements for control of superconducting quantum circuits. Adv. Phys. X 5, 1813626. doi:10.1080/23746149.2020.1813626
Heinosaari, T., Holevo, A. S., and Wolf, M. M. (2010). The semigroup structure of Gaussian channels. Quantum Inf. Comput. 10, 0619. doi:10.26421/QIC10.7-8-4
Hofer, S. G., and Hammerer, K. (2015). Entanglement-enhanced time-continuous quantum control in optomechanics. Phys. Rev. A 91, 033822. doi:10.1103/physreva.91.033822
Hofer, S. G., and Hammerer, K. (2017). Quantum control of optomechanical systems. Adv. Atomic, Mol. Opt. Phys. 66, 263–374. doi:10.1016/bs.aamop.2017.03.003
Huang, Z., and Sarovar, M. (2018). Smoothing of Gaussian quantum dynamics for force detection. Phys. Rev. A 97, 1712, 042106. doi:10.1103/physreva.97.042106
Ivan, J. S., Kumar, M. S., and Simon, R. (2012). A measure of non-Gaussianity for quantum states. Quantum Inf. Process. 11, 853–872. doi:10.1007/s11128-011-0314-2
Iwasawa, K., Makino, K., Yonezawa, H., Tsang, M., Davidovic, A., Huntington, E., et al. (2013). Quantum-limited mirror-motion estimation. Phys. Rev. Lett. 111, 163602. doi:10.1103/physrevlett.111.163602
Jacobs, K. (2014). Quantum measurement theory and its applications. Cambridge: Cambridge University Press.
Jacobs, K., and Steck, D. A. (2006). A straightforward introduction to continuous quantum measurement. Contemp. Phys. 47, 279–303. doi:10.1080/00107510601101934
Khalili, F., Danilishin, S., Miao, H., Müller-Ebhardt, H., Yang, H., and Chen, Y. (2010). Preparing a mechanical oscillator in non-Gaussian quantum states. Phys. Rev. Lett. 105, 070403. doi:10.1103/physrevlett.105.070403
Kohler, J., Gerber, J. A., Deist, E., and Stamper-Kurn, D. M. (2020). Simultaneous retrodiction of multimode optomechanical systems using matched filters. Phys. Rev. A 101, 023804. doi:10.1103/physreva.101.023804
Kong, J., Jiménez-Martínez, R., Troullinou, C., Lucivero, V. G., Tóth, G., and Mitchell, M. W. (2020). Measurement-induced, spatially-extended entanglement in a hot, strongly-interacting atomic system. Nat. Commun. 11, 2415. doi:10.1038/s41467-020-15899-1
Kuznetsov, D. F. (2017). Multiple ito and Stratonovich stochastic integrals: fourier-legendre and trogonometric expansions. Approx. Formulas, Differ. Equations Control Process. 1.
Liao, J., Jost, M., Schaffner, M., Magno, M., Korb, M., Benini, L., et al. (2019). FPGA implementation of a Kalman-based motion estimator for levitated nanoparticles. IEEE Trans. Instrum. Meas. 68, 2374–2386. doi:10.1109/tim.2018.2879146
Lvovsky, A. I., and Raymer, M. G. (2009). Continuous-variable optical quantum-state tomography. Rev. Mod. Phys. 81, 299–332. doi:10.1103/revmodphys.81.299
Ma, K., Kong, J., Wang, Y., and Lu, X.-M. (2022). Review of the applications of kalman filtering in quantum systems. Symmetry 14, 2478. doi:10.3390/sym14122478
Magrini, L., Rosenzweig, P., Bach, C., Deutschmann-Olek, A., Hofer, S. G., Hong, S., et al. (2021). Real-time optimal quantum control of mechanical motion at room temperature. Nature 595, 373–377. doi:10.1038/s41586-021-03602-3
Meng, C., Brawley, G. A., Khademi, S., Bridge, E. M., Bennett, J. S., and Bowen, W. P. (2022). Measurement-based preparation of multimode mechanical states. Sci. Adv. 8, eabm7585. doi:10.1126/sciadv.abm7585
Miao, H., Danilishin, S., Müller-Ebhardt, H., Rehbein, H., Somiya, K., and Chen, Y. (2010). Probing macroscopic quantum states with a sub-Heisenberg accuracy. Phys. Rev. A 81, 012114. doi:10.1103/physreva.81.012114
Mikosch, T. (1998). “Elementary stochastic calculus,” in With finance in view, advanced series on statistical science and applied probability (Singapore: World Scientific Publishing Co. Pte. Ltd.).
Nielsen, M. A., and Chuang, I. L. (2010). Quantum computation and quantum information. Cambridge: Cambridge University Press.
Olivares, S. (2012). Quantum optics in the phase space. Eur. Phys. J. Special Top. 203, 3–24. doi:10.1140/epjst/e2012-01532-4
Paris, M., and Řeháček, J. (2004). “Quantum state estimation,” in Lecture notes in physics (Berlin, Heidelberg: Springer Berlin Heidelberg).
Paris, M. G. A., Illuminati, F., Serafini, A., and De Siena, S. (2003). Purity of Gaussian states: measurement schemes and time evolution in noisy channels. Phys. Rev. A 68, 012314. doi:10.1103/physreva.68.012314
Pegg, D. T., Barnett, S. M., and Jeffers, J. (2002). Quantum retrodiction in open systems. Phys. Rev. A 66, 022106. doi:10.1103/physreva.66.022106
Rossi, M., Mason, D., Chen, J., Tsaturyan, Y., and Schliesser, A. (2018). Measurement-based quantum control of mechanical motion. Nature 563, 53–58. doi:10.1038/s41586-018-0643-8
Rybarczyk, T., Peaudecerf, B., Penasa, M., Gerlich, S., Julsgaard, B., Mølmer, K., et al. (2015). Forward-backward analysis of the photon-number evolution in a cavity. Phys. Rev. A 91, 062116. doi:10.1103/physreva.91.062116
Setter, A., Toroš, M., Ralph, J. F., and Ulbricht, H. (2018). Real-time Kalman filter: cooling of an optically levitated nanoparticle. Phys. Rev. A 97, 033822. doi:10.1103/physreva.97.033822
Tan, D., Foroozani, N., Naghiloo, M., Kiilerich, A. H., Mølmer, K., and Murch, K. W. (2017). Homodyne monitoring of postselected decay. Phys. Rev. A 96, 022104. doi:10.1103/physreva.96.022104
Tan, D., Naghiloo, M., Mølmer, K., and Murch, K. W. (2016). Quantum smoothing for classical mixtures. Phys. Rev. A 94, 050102. doi:10.1103/physreva.94.050102
Tan, D., Weber, S. J., Siddiqi, I., Mølmer, K., and Murch, K. W. (2015). Prediction and retrodiction for a continuously monitored superconducting qubit. Phys. Rev. Lett. 114, 090403. doi:10.1103/physrevlett.114.090403
Thomas, R. A., Parniak, M., Østfeldt, C., Møller, C. B., Bærentsen, C., Tsaturyan, Y., et al. (2020). Entanglement between distant macroscopic mechanical and spin systems. Nat. Phys. 17, 228–233. doi:10.1038/s41567-020-1031-5
Tsang, M. (2009a). Time-symmetric quantum theory of smoothing. Phys. Rev. Lett. 102, 250403. doi:10.1103/physrevlett.102.250403
Tsang, M. (2009b). Optimal waveform estimation for classical and quantum systems via time-symmetric smoothing. Phys. Rev. A 80, 033840. doi:10.1103/physreva.80.033840
Tsang, M. (2010). Optimal waveform estimation for classical and quantum systems via time-symmetric smoothing. II. Applications to atomic magnetometry and Hardy’s paradox. Phys. Rev. A 81, 013824. doi:10.1103/physreva.81.013824
Van Handel, R. (2009). The stability of quantum markov filters, infinite dimensional analysis. Quantum Probab. Relat. Top. 12, 153–172. doi:10.1142/s0219025709003549
Wang, X., Hiroshima, T., Tomita, A., and Hayashi, M. (2007). Quantum information with Gaussian states. Phys. Rep. 448, 1–111. doi:10.1016/j.physrep.2007.04.005
Warszawski, P., Wiseman, H. M., and Doherty, A. C. (2020). Solving quantum trajectories for systems with linear heisenberg-picture dynamics and Gaussian measurement noise. Phys. Rev. A 102, 042210. doi:10.1103/physreva.102.042210
Weber, S. J., Murch, K. W., Kimchi-Schwartz, M. E., Roch, N., and Siddiqi, I. (2016). Quantum trajectories of superconducting qubits. Comptes Rendus Phys. 17, 766–777. doi:10.1016/j.crhy.2016.07.007
Weedbrook, C., Pirandola, S., García-Patrón, R., Cerf, N. J., Ralph, T. C., Shapiro, J. H., et al. (2012). Gaussian quantum information. Rev. Mod. Phys. 84, 621–669. doi:10.1103/revmodphys.84.621
Wieczorek, W., Hofer, S. G., Hoelscher-Obermaier, J., Riedinger, R., Hammerer, K., and Aspelmeyer, M. (2015). Optimal state estimation for cavity optomechanical systems. Phys. Rev. Lett. 114, 223601. doi:10.1103/physrevlett.114.223601
Wiseman, H. M. (1996). Quantum trajectories and quantum measurement theory. J. Eur. Opt. Soc. Part B 8, 205–222. doi:10.1088/1355-5111/8/1/015
Wiseman, H. M., and Milburn, G. J. (2010). Quantum measurement and control. Cambridge: Cambridge University Press.
Zhang, G., and Dong, Z. (2022). Linear quantum systems: a tutorial. Annu. Rev. Control 54, 274–294. doi:10.1016/j.arcontrol.2022.04.013
Zhang, J., and Mølmer, K. (2017). Prediction and retrodiction with continuously monitored Gaussian states. Phys. Rev. A 96, 062131. doi:10.1103/physreva.96.062131
Keywords: quantum physics, optomechanics, measurement theory, continuous measurement, retrodiction
Citation: Lammers J and Hammerer K (2024) Quantum retrodiction in Gaussian systems and applications in optomechanics. Front. Quantum Sci. Technol. 2:1294905. doi: 10.3389/frqst.2023.1294905
Received: 15 September 2023; Accepted: 14 December 2023;
Published: 25 January 2024.
Edited by:
Sankar Davuluri, Birla Institute of Technology and Science, IndiaReviewed by:
Aranya Bhuti Bhattacherjee, Birla Institute of Technology and Science, IndiaAndrey A. Rakhubovsky, Palacký University, Czechia
Andreu Riera-Campeny, Institute for Quantum Optics and Quantum Information (OAW), Austria
Copyright © 2024 Lammers and Hammerer. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Klemens Hammerer, klemens.hammerer@itp.uni-hannover.de