 Eckhard Gauterin*
Eckhard Gauterin* Horst Schulte
Horst Schulte- Control Engineering Group, Department of Engineering I, University of Applied Sciences HTW Berlin, Berlin, Germany
This contribution presents a Lyapunov-based controller and observer design method to achieve an effective design process for more dedicated closed-loop dynamics, i.e., a maximal flexibility in an observer-based controller design with a large consistency in desired and achieved closed-loop system dynamics is intended. The proposed, pragmatic approach enhances the scope for controller and observer design by using local instead of global Lyapunov functions, beneficial for systems with widely spaced pole locations. Within this contribution, the proposed design approach is applied to the complex control design task of wind turbine control. As the mechanical loads that affect the wind turbine components are very sensitive to the closed-loop system dynamic, a maximum flexibility in the control design is necessary for an appropriate wind turbine controller performance. Therefore, the implication of the local Lyapunov approach for an effective control design in the Takagi-Sugeno framework is discussed based on the sensitivity of the closed-loop pole locations and resulting mechanical loads to a variation of the design parameters.
1 Introduction
The mechanical loads, affecting a wind turbine (WT), are very sensitive to the closed-loop system dynamics. Hence, for the design of an appropriate WT controller, a maximal flexibility is necessary to mitigate the resulting, mechanical loads. For this purpose, model-based and automated controller optimisation procedures are recommended. Until now, the authors achieved the intended flexibility with decomposed, structural dynamic models of the wind turbine (e.g., (Pöschke et al., 2020)) and with an observer-based controller structure (Gauterin et al. (2014), Pöschke et al. (2019)), whose separately designed observer and controller are based on a common and global Lyapunov approach, respectively. With the local Lyapunov approach, conceived in the outlook of (Pöschke et al., 2022) and presented in this work the first time, the evolution of the design process with an increased controller flexibility and improved consistency is proceeded by the implementation of a more effective controller design procedure.
In control theory, the Lyapunov approach (Lyapunov, 1992) is utilised for controller synthesis, i.e., to analyse the stability of closed-loop systems and simultaneously providing the related controller gains. Within a model-based control design, the Lyapunov approach enables an automated design process.
As most real world systems are characterised by complex, nonlinear dynamics, techniques to analyse stability and dynamical characteristics are needed. For this, the Takagi-Sugeno (TS) framework (Takagi and Sugeno, 1985) may be used, that describes a nonlinear system as convexly blended linear submodels (Ai, Bi) (Tanaka and Sano, 1994a). A thorough discussion on the TS methodology is given in (Tanaka and Wang, 2001) and with a focus on observer-based methods in (Lendek et al., 2010). To form the TS model structure, the individual linear submodels (Ai, Bi) may be gained with the sector nonlinearity approach (Tanaka and Sano, 1994b), which yields an exact representation of the nonlinear system, or by linearisation (Johansen et al., 2000). As the identification and analysis of numerically derived linearised models is an established approach to investigate control properties in the wind turbine application (Bossanyi, 2000), the linearisation approach is used within this proceeding, too. To facilitate this, aero-elastic simulation programs like NREL FAST (Jonkman and Buhl, 2005; Jonkman, 2016) provide a linearisation feature to easily obtain the used matrices Ai, Bi as discussed in (Jonkman and Jonkman, 2016). The resulting TS model allows for the analysis of the dynamical properties and stability of both, the open- and closed-loop system.
Using the inequality of the Lyapunov approach on these convexly blended combinations of linear submodels in its matrix formulation, linear matrix inequalities (LMI, (Boyd et al., 1994)) are derived that describe the stability condition of the system dynamics (Tanaka and Wang (1997), Tanaka and Wang (2001), Lendek et al. (2010)). Additionally, performance constraints, in form of physically interpretable pole regions, can be specified and formulated in terms of LMIs (Chilali and Pascal, 1996). The combination of the stability condition with the performance constraints forms a collection of LMIs, which can be efficiently solved with numerical LMI solvers (VanAntwerp and Braatz, 2000). The LMIs’ solution space and thereby the solution’s conservativeness is restricted by the stability condition and the number of performance constraints taken into account. However, the conservativeness may be influenced, e.g., by the way the TS model is constructed and/or the use of relaxations in the resulting LMI (Tanaka et al. (1998), Tanaka and Wang (2001)).
For an observer-based controller, a separated controller and observer design can be used. The corresponding separation principle is also valid for observer-based TS controllers (Yoneyama et al. (1998), Ma et al. (1998)), but does not necessarily hold for parameter uncertainties or stochastic noise. Therefore, design procedures are investigated, which account for these restrictions (Zemouche et al., 2016), (Rauh et al., 2021). As an overall observer and controller design often results in conservative controller and control objective performances, respectively, pragmatic design syntheses are intended for real world application, rather than a guaranteed overall stability of the observer-based controller. From engineering point of view, a controller with guaranteed, overall system stability does not ensure stability for the closed-loop real world system dynamics, as the controller design model cannot cover all uncertainties (e.g., resulting from unpredicted or non-modelled environmental influences).
With the proposed local Lyapunov approach, a pragmatic controller design procedure is introduced, that utilises a separated controller and observer design and reduces the stability conditions from global stability conditions (of the nonlinear system within the defined operational range of the TS description) to local stability conditions (at each considered operating point, i.e., small-signal stability). With the resulting reduction of the number of parallel to be solved LMIs, the constraints for the solver are reduced and thereby the flexibility in assigning desired pole locations of the closed-loop system is increased, i.e., the pole region bound modifiability and flexibility, respectively is significantly improved. The less conservative task for the LMI solver enables the specification of tighter performance constraints (e.g., smaller pole regions) and reaches an increased consistency in desired and achieved closed-loop dynamics. The increased consistency and increased flexibility, are hereinafter denoted as the general objective of the local Lyapunov approach (see Section 2.3). Hence, the pragmatic local Lyapunov approach provides an enhanced design scope for real world applications and results in a control design method, which is highly effective in posing more dedicated closed-loop dynamics, especially beneficial for systems with widely spaced pole locations.
Within this contribution the concept of a local Lyapunov approach is described in detail the first time and applied for wind turbine (WT) systems, characterised by widely spaced pole locations of the open-loop system, due to the divergent stiffness, damping and inertia of the main components, like rotor blades and tower. Also for these challenging system dynamics, WT controllers in a TS framework have demonstrated to be capable for energy yield optimisation, load mitigation and active power reduction (Pöschke et al., 2020) or fault tolerant control (Georg (2015), Schulte and Gauterin (2015)). The utilised TS WT system model is achieved by linearising an elaborated WT simulation model (the NREL FAST 5 MW reference WT model (Jonkman et al., 2009)). Thereby, all mechanical couplings between the WT main components’ degree of freedom are neglected to increase the flexibility for the controller design. That is, the overall, decomposed TS model comprises decoupled TS WT main component models (with each TS WT main component model consisting of convexly blended linear submodels) that are achieved from linearisation and afterwards combined to the overall, decomposed TS WT model.—As a precise wind speed measurement is hardly feasible with conventional, cost-effective anemometers on WT (e.g., due to high turbulences induced by the rotor (Ostergaard et al., 2007) and the significant variation of the local wind speeds within the enormous size of the rotor swept area), advanced, expensive sensors (like LiDaR systems (Schlipf et al., 2010)) and observer techniques are investigated for the WT application ((Ma et al. (1995), Ostergaard et al. (2007), Jena and Rajendran (2015), Gauterin et al. (2015)). Within this contribution, a TS disturbance observer is used for an estimation of the unknown wind speed as premise variable, enabling a premise variable scheduled feedforward actuation for disturbance attenuation (Gauterin et al., 2014), while the—also premise variable scheduled—feedback-controller just compensates the control signal deviations resulting from model-uncertainties. To evaluate the observer-based TS feedforward-feedback controller achieved with the local Lyapunov observer design approach, the NREL FAST 5 MW reference WT model is used for WT operation simulation.
The paper is organised as follows: In Section 2 Method, the TS framework (Section 2.1), the global and local Lyapunov approach (Section 2.2 and Section 2.3) and its application to WT control (Section 2.4) with additional performance constraints (Section 2.5) is introduced. Section 3 Simulations and Results describes the simulation design (Section 3.1) and the achieved results (Section 3.2). Finally, in Section 4 Discussion the achieved results are assessed and a Conclusion is drawn in Section 5.
2 Method: Global and Local Lyapunov Approach
In this Section the Takagi-Sugeno (TS) framework (Section 2.1) and the global Lyapunov approach are presented (Section 2.2). In Section 2.3 the local Lyapunov approach is introduced to system models described in the TS framework. Its application for wind turbine control is presented in Section 2.4 and additional controller design constraints to define pole regions with regard to wind turbine application are described in Section 2.5.
2.1 System Model, Controller and Observer in Takagi-Sugeno Framework
2.1.1 System Model
In this proceeding, a nonlinear system
For the wind turbine (WT) application, the plant model is generated by linearising the nonlinear system model at Nr steady state operating points (piecewise equidistant regarding the disturbing wind speed v), resulting in a set of Nr linear submodels (Ai, Bi) (with i ∈ [1, imax] and imax ≡ Nr). These submodels comprise the state matrices Ai and input matrices Bi for the state vector
The linear submodels (Ai, Bi) are blended in a convex sum
with the help of membership functions
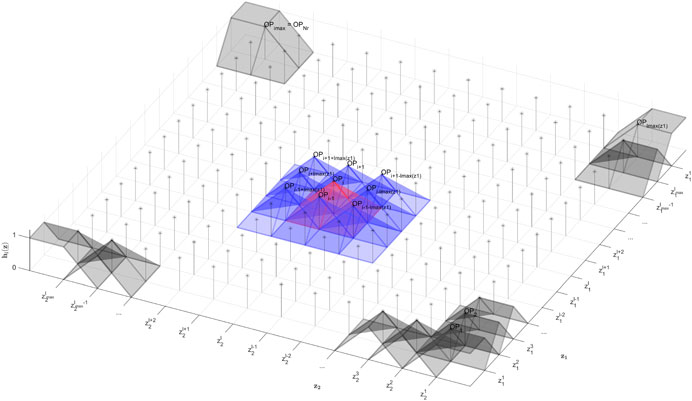
FIGURE 1. Illustrative example for pyramid-shaped membership functions
The weighting functions wk,l (zk) are combined to form the
In this contribution, the membership functions
In WT application, it is advantageous to define the reconstructed wind speed
Within this contribution individual input-matrices Bi, e.g., depending on the wind speeds v and rotor rotation speed ωR, and a common output-matrix Ci ≡C, just describing the measurable states
2.1.2 Parallel-Distributed-Compensation-Controller With Feedforward Actuation
In the TS framework, a state-space controller
In Eq. 4 and the following, it is assumed, that
If the disturbance attenuation is realised with a feedforward actuation, the PDC controller (Eq. 4) is extended to
With the feedforward signal
2.1.3 Takagi-Sugeno Observer
For nonlinear systems
with the reconstructed states
For the error dynamics
it follows with Eqs 7, 1 in Eq. 8 (with the common output matrix C, see Section 2.1.1 and Section 2.2.2)2:
Within this contribution (and the previously published works in (Gauterin et al., 2014) and (Pöschke et al., 2020)) the TS-observer is implemented to reconstruct the disturbing wind speed
2.2 Global Lyapunov Approach Based Takagi-Sugeno Controller and Observer Design
The state-feedback gains Kj and error-feedback gains Li are achieved from the stability condition, based on a Lyapunov approach: Assigning a simple, quadratic Lyapunov function, the following global stability condition yields
for the common and global, respectively, symmetric, positive definite matrix P ≻ 0 and the system-states
Hereinafter, the Lyapunov approach Eq. 10 is denoted as the global Lyapunov approach.
2.2.1 Global Controller
LMI derivation
With Eq. 6 in Eq. 10
With the pre- and postmultiplication P−1 ⋅ □ and □⋅ P−1, the thereby necessary substitution
The inequality Eq. 12 is solvable with a LMI-solver, if a discrete number of LMIs is derived from Eq. 12. Therefore, the convex properties of the membership functions hi hj are exploited to derive the following LMI set with the intended discrete number of LMIs:
If the LMI set Eq. 13 is solvable, i.e., a positive definite matrix
Controller design procedure
Once a common matrix P and the slag parameter Mj are found with the LMI solver, the state-feedback gains Kj are defined by Kj = Mj P. That is, for individual input matrices Bi the state-feedback gain Kj of the jth submodel and subcontroller, respectively, is designed in a way, that the subcontroller holds the LMI Eq. 10 and LMI set Eq. 13, the latter combining1 the closed-loop dynamic of the jth submodel with the dynamic of all other or the direct adjacent submodels.
Number of LMIs
For the discrete number of combined1 LMIs in the LMI set Eq. 13 it holds:
2.2.2 Global Observer
LMI derivation
With Eq. 9 in Eq. 13
With the introduction of the slag parameter Ni = P Li (to avoid the bilinear term P Li within the resulting inequality) the following inequality for the error dynamics is derived from Eq. 14:
Eq. 15 holds (as explained for Eq. 12), if the LMI set
is satisfied, i.e., a positive definite matrix P ≻ 0 (see Eq. 10) exists, so that the Lyapunov approach Eq. 10 (and its derivative Eq. 15) is fulfilled and the error system’s stability is guaranteed.
Observer design procedure
Once a common matrix P and the slag parameter Ni are found with the LMI solver, the error-feedback gains Li are defined by Li = P−1 Ni. That is, for a common output matrix Ci ≡ C the error-feedback gain Li of the ith submodel and subobserver, respectively is designed in a way, that the subobserver holds the LMI Eq. 10 and the LMI set Eq. 16, the latter just comprising the error dynamics of each single submodel (Ai, Bi) in an individual and single LMI, respectively (and not combining the dynamics of all or direct adjacent submodels).
Number of LMIs
For the discrete number of individual LMIs in the LMI set Eq. 16 it holds:
2.3 Local Lyapunov Approach for Takagi-Sugeno Controller and Observer Design
For the proposed local Lyapunov approach the local stability condition
holds for the individual and local, respectively, symmetric, positive definite matrix Pi ≻ 0 and the system-states
Accordingly, the LMI derived for the closed-loop dynamics Eq. 13 and error dynamics Eq. 16 is simplified, as the convex blending becomes obsolete, if the Lyapunov stability condition is defined for each submodel individually (compare Eq. 18 with Eq. 12 and Eq. 20 with Eq. 15).
2.3.1 Local Controller LMI
For the local Lyapunov approach the inequality derived for the closed-loop dynamics (with
The inequality (Eq. 18) holds, if the LMI
is satisfied, i.e., individual and local, respectively positive definite matrices Xi exist, which fulfill Eq. 19.
2.3.2 Local Observer LMI
The same simplification holds for the error dynamics, i.e. for the local Lyapunov approach the inequality derived for the error dynamics (with
The inequality (Eq. 20) holds, if the LMI
is satisfied, i.e. individual and local, respectively positive definite matrices Pi exist, which fulfill Eq. 21.
2.3.3 Local Controller and Observer Design Procedure
Once the individual matrix Pi and the slag parameter Mi (for local controller design) or Ni (for local observer design) is found with the LMI solver, the state-feedback gain Ki or error-feedback gain Li is defined by Ki = Mi Pi or
2.3.4 Number of LMIs
As the local Lyapunov approach simplifies and reduces, respectively the set of combined LMIs (for the local Lyapunov approach the LMI set comprises just two LMIs: LMI Eq. 19 or Eq. 21 and the LMI of the positive definite matrix Pi ≻ 0, see Eq. 17), the parallel and simultaneously, respectively to be solved LMIs are reduced (from
2.3.5 Subsequent, Global Lyapunov Stability Analysis
Note: With the local Lyapunov approach and the resulting LMIs Eq. 19 and Eq. 21, just the small signal stability is evaluated, i.e., considering the operating point depicted in the linear submodel, if a positive definite matrix Pi exists. To ensure the global stability of the convexly blended submodels, a final stability analysis has to be performed, enveloping all combined closed-loop submodels. This final stability analysis is executed in the subsequent, global Lyapunov stability analysis described in Section 2.4.4.
2.4 Local Lyapunov Approach in Wind Turbine Control Application
2.4.1 Structural Dynamical Design Model
For the wind turbine (WT) controller design, the authors use simplified structural dynamical models, based on lumped-masses and joined with discrete spring- and damper-elements (e.g., (Bianchi et al., 2007), (Georg, 2015) or (Pöschke et al., 2020)). These models comprise just the essential and costly wind turbine components rotor, drive train and tower. Within this contribution, the rotor blade dynamic is represented, while the tower dynamic is neglected (see Figure 2). The rotor model is composed of the rotor
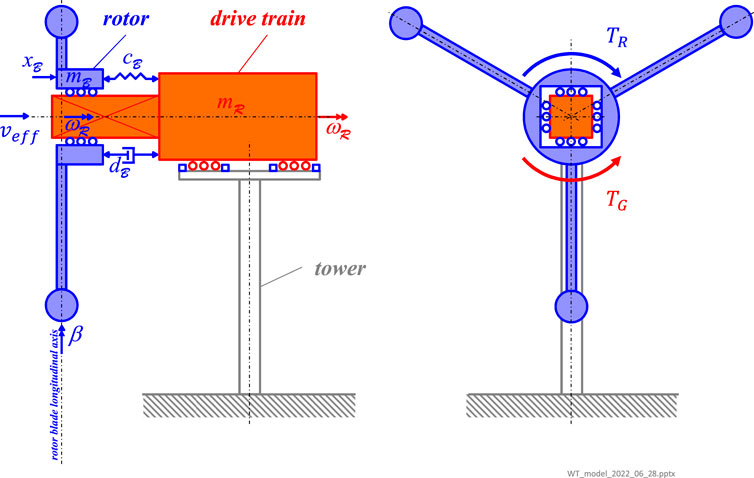
FIGURE 2. Structural dynamical design model of a wind turbine (in side- and front-view) with the two degree of freedom: •
After linearising an elaborated WT simulation model for i stationary operating points OPi (with i ∈ [1, Nr]), the controller design submodels
2.4.2 Wind Turbine Control Objectives, Loading and Operation Concept
In wind turbine (WT) application the controller intends—besides energy yield optimisation—for mechanical load mitigation, due to vast environmental loads acting on the complete WT structure. Besides the ultimate, mechanical loads (that occur for single moments and the corresponding ultimate stress must not exceed the material strength), fatigue, mechanical loads have to be examined. Those fatigue loads, also denoted as Damage Equivalent Loads (DEL, i.e., a mean amplitude with the equivalent damaging effect like constantly or stochastically changing amplitudes, e.g., resulting from turbulent wind time series), characterise the damaging effect resulting from load cycles, occurring all over the components’ lifetime (Clem ens et al., 2020).
Ascribed to the generator characteristics, two operating modes have to be distinguished: In the partial load range, the generator is operated below rated power and the energy yield is optimised by generator torque TG control, i.e., the generator torque TG is one of the two actuating signals. In full load range, the generator is operated at rated power. Therefore, the energy extraction from the inflow with the WT rotor is restricted to rated generator power by the pitch angle β control, influencing the blade aerodynamics and mechanical torque TR generation of the rotor by rotating the complete rotor blade along its longitudinal axis (see Figure 2). Hence, the pitch angle β is the second actuating signal of a wind turbine controller, i.e.,
2.4.3 Implemented Wind Turbine Controller Structure
Within this contribution an observer-based feedforward-feedback controller in TS framework is utilised and applied to wind turbine control.
For the feedforward-feedback controller the extended parallel distributed compensation (PDC) controller Eq. 5 is used.
To attenuate the effect of the disturbing wind speed, a disturbance-observer is used (see Section 2.1.3 and Figure 3) to determine the rotor effective wind speed veff. For the disturbance observer, the WT main component model (see Section 2.4.1 and Section 2.4.4) with the highest disturbance sensitivity is used, i.e., for wind turbine systems the downwind and upwind blade deflection
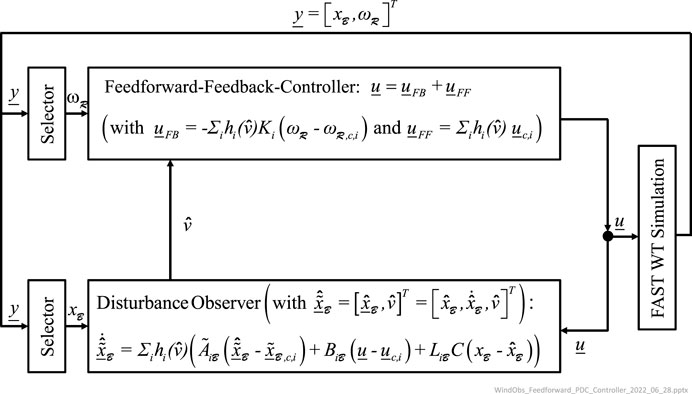
FIGURE 3. Block digram of the observer-based Takagi-Sugeno wind turbine controller.
The reconstructed wind speed
Within this contribution, triangular-shaped4 membership functions hi(z) are used, just blending directly adjacent submodels (Ai, Bi) (see Figure 1 and the explanations in Section 2.1.1). Because of the reduced number of (triangular) membership functions (i.e., just the direct adjacent membership functions are taken into account and not all membership functions), also the number of submodels included in the feedback controller and observer design—based on the global Lyapunov approach—is reduced (see Section 2.3) (Note: For the local Lyapunov approach an individual Lyapunov function Vi is defined for each submodel (Ai, Bi), because of the local stability condition Eq. 17. Therefore, the convex blending with the membership functions
The augmented state, input and output matrices
2.4.4 Decomposed Wind Turbine System and Subsequent Lyapunov Stability Analysis
Mechanical and mechatronic systems, like wind turbines (WT), are characterised by the pole locations of the coupled mechanical components. Due to the widely spaced, open-loop pole locations of the WT system (see Figure 4 and Section 4), it is advantageous for the controller and observer design models to decompose the coupled, nonlinear system submodel (Ai, Bi) into decoupled reduced submodels—denoted with component models—just comprising the dynamics of the individual, mechanical main components like the rotor blade submodels
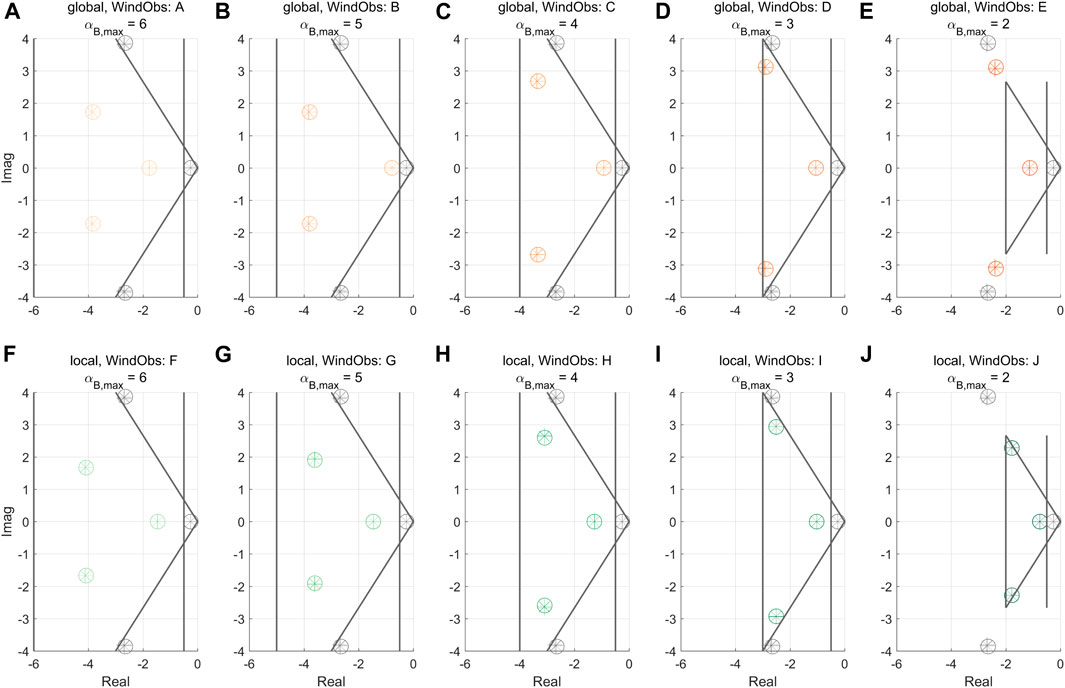
FIGURE 4. Pole locations of the error dynamics (achieved within the wind speed observer design) for an increasing upper bound
Thereby, couplings between the components’ degree of freedom are neglected within the component controller and observer design models, like the missing axial coupling between drive train and main frame/tower depicted in Figure 2 (just plain ball bearings are defined). Despite this substantial assumption, the component design models achieve satisfying controller performance, while increasing the controller design flexibility significantly.
The corresponding design models are derived from the elaborated NREL FAST 5 MW reference wind turbine (Jonkman, 2016; Jonkman and Buhl (2005) and Jonkman et al. (2009)) simulation model, based on a convex sum of 27 linearised submodels (defined for piecewise equidistant, steady and effective wind speeds from v ∈ [3 m/s, 25 m/s]; see Table A1), received from the NREL FAST WT linearisation (Jonkman and Jonkman, 2016). Within this linearisation, all aerodynamic and structural dynamic characteristics defined in the elaborated NREL FAST 5 MW reference wind turbine are accounted (see also explanations given in (Pöschke et al., 2020)).
Once the component controllers and observers are designed, the corresponding state-feedback gains (
2.5 LMI Constraints of the Pole Regions
With the linear matrix inequalities Eqs 13, 16, 19 and Eq 21 the pole locations are just restricted to the left half of the complex pole map. Additional constraints need to be defined to tighten the pole location on smaller pole regions. As described in (Chilali and Pascal, 1996), additional bounds specified in the complex pole map can be transformed into LMI, which are applied to wind turbine control e.g., in (Pöschke et al., 2019). Within this contribution, just vertical upper and lower bounds (representing the maximum and minimum decay rate
3 Simulations and Results
With the local Lyapunov approach, the general objective of a more flexible specification of the pole locations and increased consistency in the desired and achieved closed-loop system dynamics is intended (see Section 2.3.4). This general objective is analysed within this contribution for a wind turbine specific, particular objective—the decreased observer performance and feedforward actuation—described in Section 3.1. The achieved results from wind turbine simulations are presented in Section 3.2.
3.1 Simulation Design: Particular Objective of the Local Lyapunov Approach Within this Contribution
Within this contribution, the general objective of the local Lyapunov approach (see Section 2.3.4) is assessed for a particular wind speed observer performance, hereinafter denoted with the particular objective, supposed to be beneficial regarding load mitigation: For turbulent wind excitation, high mechanical loads (especially fatigue loads) often result from brisk feedforward actuation5. Therefore, the proposed local Lyapunov approach shall yield for a decreased disturbance reconstruction
To distinguish the pole locations
with the j components
Within this contribution, the general objective of an increased flexibility in the observer-based controller design and increased consistency of the desired and achieved system dynamics (see Section 2.3.4) is analysed with the particular objective of an decreased observer performance and feedforward actuation, resulting from shrinking pole regions. That is, for both Lyapunov approaches identical upper bound variation and shrinking pole regions are defined and the flexibility and consistency of both approaches are compared with the help of several metrics (like pole locations, error-feedback gains, reconstructed wind speeds, pitch angles, pitch rate and rotation speed deviations): Regarding the flexibility, the minimum pole region dimension is determined. That is, for all poles it is examined, if the poles are located inside the imposed pole region after executing the error-feedback gain Li design. The intended, particular objective of a decreased observer performance of the local Lyapunov approach is fulfilled, if this approach leads to a smaller, minimum pole region than the global Lyapunov approach, enabling the specification of tighter performance constraints for the system dynamics. Regarding the consistency of desired and achieved system dynamics, it is analysed, if the shrinking poles regions result in decreased feedforward pitch angles βFF and increased feedback pitch angles βFB with decreased pitch rates
In addition, the control objectives of mitigated ultimate and fatigue loads are analysed for identical WT controller pole region specifications, but related to both disturbance observer design approaches.
3.2 Simulation Results: Disturbance Observer Variation, Resulting System Dynamics and Mechanical Loads
For each Lyapunov approach, five different disturbance observers for the
Pole regions and submodels
In Table 1, the pole region specifications for both design approaches are listed. For the analysed wind time series excitation with prescribed wind speeds v(t) between 14 m/s and 16 m/s, just four of the i ∈ [1,27], from linearisation achieved submodels (denoted with the subscripted index i) are convexly blended. Therefore, just these four submodels (Ai, Bi) with i ∈ [15,18] are taken into account in the results and discussion.

TABLE 1. Description of the TS disturbance observers (i.e., wind speed observers) (for the wind speed observers w in A to E, based on the
Pole locations
Figure 4 shows the resulting p pole locations
between open-loop poles
of the single submodel i and the average distance
of all four submodels are listed in Table 2.
TABLE 2. Distances
Error feedback gains
The related error-feedback gain matrices
The metric
The results are depicted in Table 3.
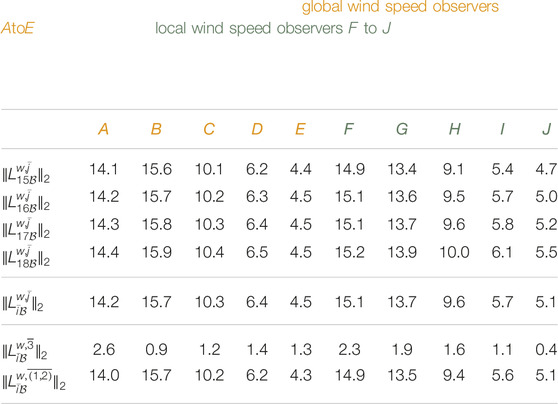
TABLE 3. Mean Euclidean norm
Membership functions
To visualise the convex blending of direct adjacent submodels (Ai, Bi), the time series of the membership functions hi for a step-shaped wind time series are depicted in Figure 5. Note: As the premise variable in this contribution is defined by one parameter
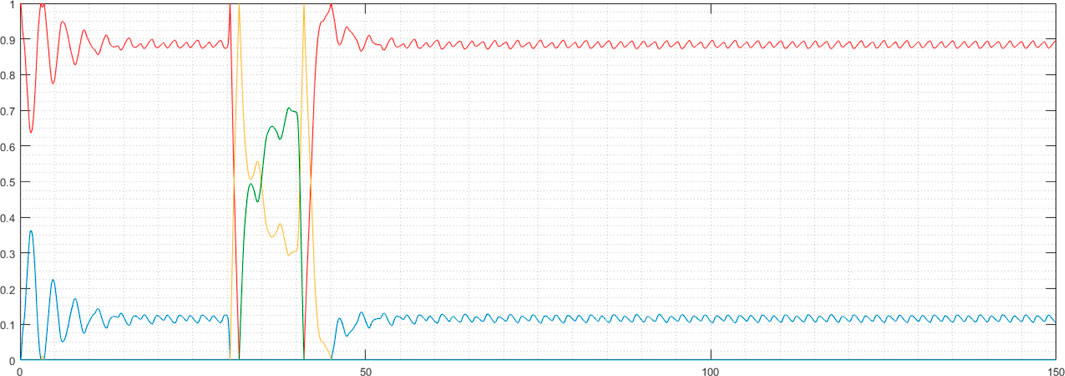
FIGURE 5. Exemplarily time series of the membership functions hi for the
Wind turbine simulations, actuation signals, pitch rate deviations, rotation speed deviations and resulting mechanical loads
To assess the closed-loop system dynamics (see Figure 6), a disturbing step-shaped time series of 150 s duration is applied to the system, visualising the effect of the particular wind speed observer design (with decreased performance, see Section 3.1) on the actuation signals. The resulting time series
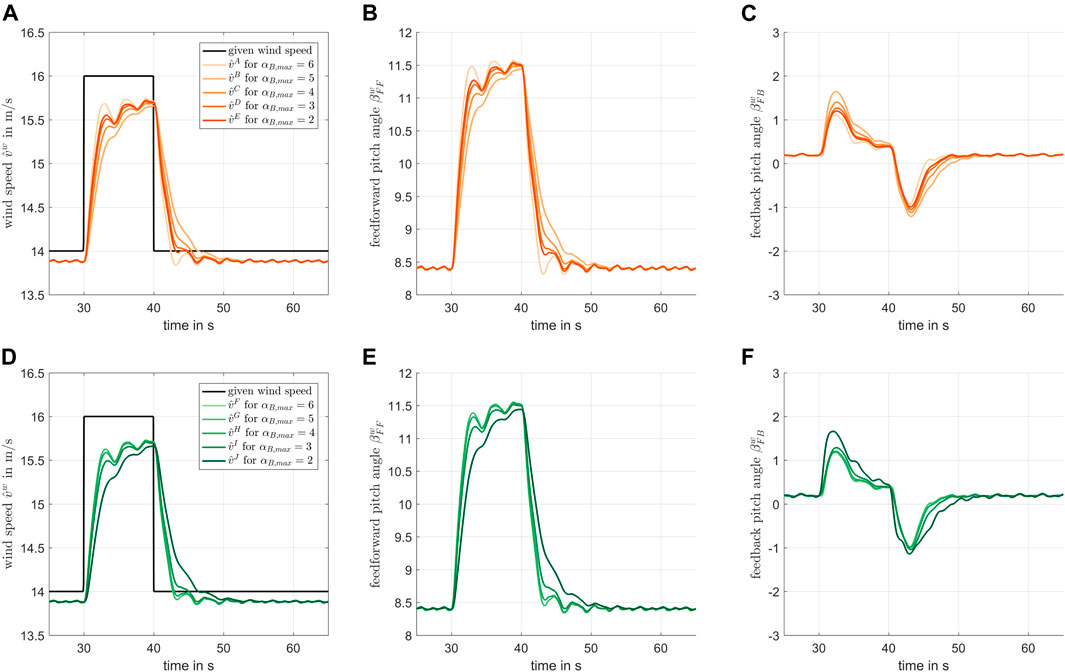
FIGURE 6. Time series segment of wind speed reconstruction
The given wind speeds v and the reconstructed wind speeds
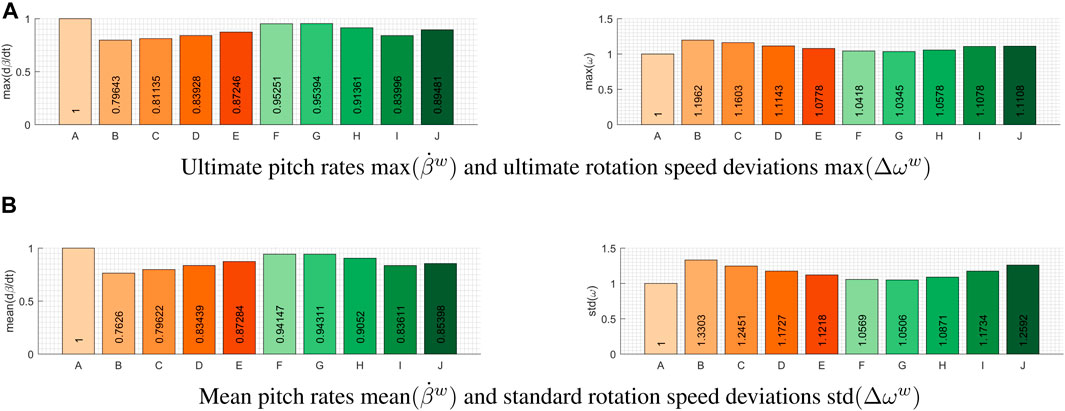
FIGURE 7. Actuation speed and pitch angle deviations, respectively (so called pitch rate
In addition, the step-shaped wind time series – representing a typical wind increase and wind decrease event (i.e. a disturbing step up and step down signal) within a turbulent wind excitation time series – is used to assess the ultimate and fatigue loads resulting from the closed-loop system dynamics of both approaches. For this load assessment, five different loads are analysed that are crucial or at least very important for the wind turbine’s main component design of tower, blades and the drive train:
• The tower bending moment in wind direction (also denoted with the fore-aft bending moment, TwrBsMyt) and normal to the wind direction (also denoted with the side-to-side bending moment, TwrBsMxt), calculated for the tower base,
• the blade bending moment in wind direction (i.e., resulting from blade bending out of the rotor plane, also denoted with the flapwise or out-of-plane bending moment, RootMyb1) and blade bending moment inside the rotor plane (edgewise or in-plane bending moment, RootMxb1), calculated for the blade root (next to the hub body) of the first blade, and
• the torsional torque (ΔTq) along the drive train axis.
The ultimate and fatigue loads, resulting from the closed-loop system dynamics, are depicted in Figure 8. To eliminate effects, resulting from simulation initialisation, the time period 0s ≤ tCutOff ≤ 10s of all time series is not taken into account in the load evaluation. (Note: If the fatigue loads in Figure 8 just differ even in the third or fourth decimal place, these differences are of significance. Because, the listed fatigue loads in Figure 8 result from a wind times series of extremely short duration (of 150 s), while wind turbines typically operate for 20 years with approximately 97% availability. That is, also fourth decimal place differences in the fatigue loads, depicted in Figure 8, do have an enormous impact on the expected wind turbine lifetime, as all damages cumulate over the complete lifetime. This cumulation does not apply to ultimate loads, as these loads occur rarely in a wind turbine’s lifetime).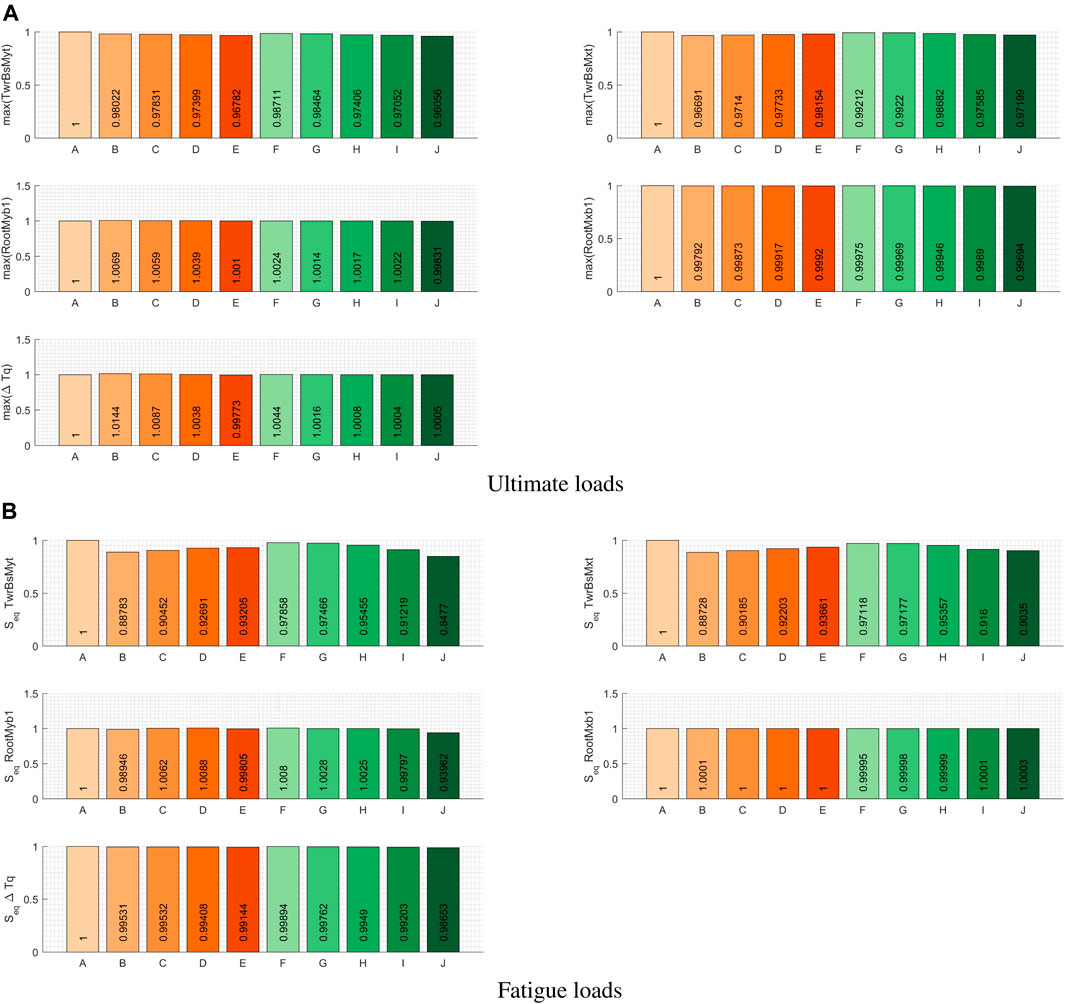
FIGURE 8. Ultimate loads maxw (…) and fatigue loads
4 Discussion
Both Lyapunov approaches fulfill the particular objective to decrease the disturbance observer performance and feedforward actuation, while increasing the feedback actuation for shrinking pole region dimensions, resulting in mitigated mechanical loads (see Section 3.1). But the local approach achieves significantly increased flexiblity and consistency of the desired and resulting system dynamics than the global approach:
Pole locations
The open-loop poles of the wind turbine system, depicted with gray symbols in Figure 4, are widely spaced, as significant distances between the real-valued wind model poles
(Note, that the LMI solver is capable to find solutions, even if the pole region LMIs are violated. However, the resulting poles are still located in the left half of the complex pole map and fulfill the basic stability condition for the corresponding closed-loop or error dynamics.)
Error-feedback gains
With the decreasing pole distances
Wind speed reconstruction and actuation signals
With the mitigated error-feedback gains
The mitigated, reconstructed wind speeds
Pitch rate deviations and rotation speed deviations
The pitch angle deviations result in corresponding pitch and rotation speed metrics: With the steadily mitigated premise variable
Load mitigation
The ultimate and fatigue loads resulting from closed-loop dynamics with the step-shaped wind excitation (depicted in Figure 8) are satisfying for both approaches, but especially for the local Lyapunov approach. In the following, the ultimate and fatigue loads are first evaluated separately for each of the two Lyapunov approaches (see Table A9), then the loads from both approaches are compared with each other (see Table A10).
• Ultimate Loads (see Figure 8A): The ultimate tower bending moments max(TwrBsMyt) and max(TwrBsMxt), as well as the ultimate in-plane blade bending moments max(RootMxb1) are mitigated for both Lyapunov approaches, and for the local Lyapunov approach these ultimate loads decrease even steadily (see lines 1 to 3 in Table A9; with one marginal exception for maxF(TwrBsMxt) < maxG(TwrBsMxt)). The ultimate out-of-plane blade bending moments max(RootMyb1) and the ultimate drive train torque max(ΔTq) increase slightly, but not significantly (see Figure 8A and lines 4 to 5 in Table A9). – Comparing both approaches with each other, for most pole regions lower ultimate loads are achieved with the local Lyapunov design approach (see Figure 8B and lines 1 to 5 in Table A10).
If a controller variation yields comparable or even lower ultimate loads, the controller (design approach) assessment depends on the fatigue loads.
• Fatigue Loads (see Figure 8B): The fatigue tower bending moments Seq(TwrBsMyt) and Seq(TwrBsMxt), as well as the fatigue drive train torque Seq(ΔT) are mitigated for both Lyapunov approaches, and for the local Lyapunov approach these fatigue loads decrease steadily (see lines 6 to 8 in Table A9; with one exception for
Additionally, the local wind speed observer design approach with the smallest pole region (see wind speed observer J) achieves the lowest fatigue loads for those bending moments and torsional torque compared to the fatigue loads, resulting from the global wind speed observer design (compare the fatigue loads of local wind speed observer J with the fatigue loads of all global wind speed observers for Seq(TwrBsMyt), Seq(TwrBsMxt)12, Seq(RootMyb1) and Seq(ΔTq) in Figure 8). – Just the in-plane blade fatigue bending moments Seq(RootMxb1) increase for the local wind speed observer design approach (as well as for the global approach). This fatigue load increase might result from the increasing rotation speed deviations max(Δω) and std(Δω). Because, for identical wind times series and system excitations, respectively, increasing fatigue loads result from increasing amplitude and/ or increasing load cycles. As the rotation speed deviations max(Δω) and std(Δω) increase with the shrinking pole region dimension (see max(Δω) and std(Δω) for WindObs w with w ∈ [G, J] in the right column of Figures 7A,B), it seems reasonable, that the fatigue load increase results from the increasing rotation speed, rather than from an amplitude increase. This assumption is also confirmed by the ultimate loads that decrease with the shrinking pole region size (see max(RootMxb1) for WindObs w with w ∈ [F, J] in Figure 8), i.e. not the amplitudes of ultimate and fatigue loads, but the load cycles of the fatigue loads increase. Additionally, with the increasing rotor speed deviations, the number of blade passages through the tower shadow13 increases, resulting in increasing load cycles and leading to increased fatigue loads.
Therefore, it seems promising as a subject of future work, to split the wind speed observer, based on a local Lyapunov approach, into two, separated wind speed observers: A feedforward wind speed observer—specified with a similar pole region (like wind speed observer I, used within this contribution)—with decreased reconstruction performance to assign the premise variable
5 Conclusion
With this contribution a local Lyapunov approach is introduced for controller and observer design in the Takagi-Sugeno framework. Compared to the common global Lyapunov approach, a more dedicated closed-loop dynamic is intended with the local Lyapunov approach, i.e., an increased flexibility in the design process and increased consistency between desired and achieved system dynamics is aspired.
The applicability and effectiveness of the local Lyapunov approach to wind turbine control is analysed with wind turbine simulations. The simulation results show, that the local Lyapunov approach makes it possible to influence the pole locations, the resulting error-feedback gains and closed-loop system dynamics more flexible and with an increased consistency between desired and achieved system dynamics than the global Lypunov approach. That is, with the local Lyapunov approach, the assignment of smaller pole regions is possible, enabling a higher flexibility in assigning desired system dynamics. Additionally, the local Lyapunov approach reaches an improved similarity between the desired and achieved closed-loop system dynamics, indicating the increased consistency of the local Lyapunov approach. As the local Lyapunov approach is less conservative, but more dedicated to the desired system dynamics, i.e., the design process achieves an increased flexibility and increased consistency, it is rated to have a higher potential in fulfilling primary and secondary control objectives, like energy yield optimisation and load mitigation in wind turbine application.
The evaluation of the local Lyapunov approach will be continued in oncoming studies, with the controller structure adapted to the new possibilities arising from the local design approach, like the separated reconstruction of the feedforward and the feedback premise variable in a split wind speed observer.
Data Availability Statement
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author.
Author Contributions
Eckhard Gauterin and Horst Schulte devised the basic Takagi-Sugeno observer-based feedforward control concept for wind turbine control and conceptualized this study. Florian Pöschke developed the linearised wind turbine model in Takagi-Sugeno framework and conceived the local Lyapunov approach. Florian Pöschke expedited the implementation and development of the control concept in the simulation software, while Eckhard Gauterin conducted the simulation studies. All three authors analysed the results and Eckhard Gauterin created the manuscript, that was reviewed by all three authors.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
1With individual input matrices Bi a weighted combination of the ith submodel with all and the direct adjacent submodels (see Section 2.1.1), respectively, is derived for the closed-loop dynamics, due to the individual weighting
2With a common output matrix Ci ≡ C the weighted combination of the ith submodel with all and the direct adjacent submodels, respectively, is superfluous for the reconstructed closed-loop dynamics, as
3Note: Within this contribution just the blade tip translations
4The triangular shape of the membership functions holds, if just one premise variable zk = z (with k = kmax = 1) is defined. Because in this case, the membership function hi(z) (Eq. 1) is identical to the triangular-shaped weighting function wk,l(z), see Eq. 2.
5These brisk feedforward-actuation result from feedforward specifications without dynamics (i.e., without any damping influence, e.g., from the Ki gains), but simple convex blending of the steady states
6with
7As the pole location distance
8PDC feedback controller: ct1010001
9to realise the shrinking pole region size, compare the pole regions’ size (and location) in Figure 4 for the wind speed observer design A and F with E and J
10The global and local wind speed observers E and J are not taken into account, because of their (closed-loop) pole locations, which are moved beyond the open-loop pole locations, as explained before in the subsection Pole locations.
11If Eq. 7 is evaluated for a single and arbitrary time point, it is obvious, that
12with two exceptions for the tower side-to-side-bending moments
13Tower shadow (effect): The tower poses as an obstacle in the inflow that increases the dynamic pressure and decreases the wind speed in front, i.e. in upwind direction of the tower.
14with two exceptions for the tower side-to-side-bending moments
15Tower shadow (effect): The tower poses as an obstacle in the inflow that increases the dynamic pressure and decreases the wind speed in front, i.e., in upwind direction of the tower
References
Bianchi, F. D., De Battista, H., and Mantz, R. J. (2007). Wind turbine control systems - principles, modelling and gain scheduling design. London, United Kingdom: Springer-Verlag, London Limited.
Bossanyi, E. A. (2000). The design of closed loop controllers for wind turbines. Wind Energy (Chichester). 3, 149–163. doi:10.1002/we.34
Boyd, S., El Ghaoui, L., Feron, E., and Balakrishnan, V. (1994). Linear matrix inequalities in system and control theory. Philadelphia: SIAM.
Chilali, M., and Pascal, G. (1996). H∞ design with Pole placement constraints: an LMI approach. IEEE Trans. Autom. Contr. 41, 358–367. doi:10.1109/9.486637
Clemens, C., Gauterin, E., Pöschke, F., and Schulte, H. (2020). “Assessment criteria for the mechanical loads of wind turbines applied to the example of active power control, s. 1-7, berlin, Germany,” in Proceedings of IFAC World Congress 2020, Berlin, Germany, 341–347.
Ekelund, T. (1994). “Speed control of wind turbines in the stall region,” in IEEE conference on control applications (Glasgow, United Kingdom), 227–232.
Gauterin, E., Kammerer, P., Martin, K., and Schulte, H. (2015). Effective wind speed estimation: comparison between kalman filter and takagi-sugeno observer techniques. ISA-Transactions 62, 60–72.
Gauterin, E., Schulte, H., and Georg, S. (2014). Disturbance compensation by wind speed reconstruction based on a takagi-sugeno wind turbine model. J. Phys. Conf. Ser. 524, 012072. Proceedings ‘The Science of Making Torque from Wind 2014’. IOP Publishing. doi:10.1088/1742-6596/524/1/012072
Georg, S. (2015). Fault diagnosis and fault-tolerant control of wind turbines nonlinear Takagi-Sugeno and sliding mode techniques. PhD thesis. Rostock, Germany: University Rostock, Fakultät für Maschinenbau und Schiffstechnik.
Jena, D., and Rajendran, S. (2015). A review of estimation of effective wind speed based control of wind turbines. Renew. Sustain. Energy Rev. 43, 1046–1062. doi:10.1016/j.rser.2014.11.088
Johansen, T. A., Shorten, R., and Murray-Smith, R. (2000). On the interpretation and identification of dynamic takagi-sugeno fuzzy models. IEEE Trans. Fuzzy Syst. 8 (3), 297–313. doi:10.1109/91.855918
Jonkman, J. (2016). NWTC Design Codes (FAST). v8.16 edition. Golden, CO: National Renewable Energy Laboratory (NREL).
Jonkman, J. B., and Jonkman, B. J. (2016). “Fast modularization framework for wind turbine simulation: full-system linearization,” in The science of making torque from wind, Vol. 753, 082010.
Jonkman, J., Butterfield, S., Musial, W., and Scott, G. (2009). Definition of a 5-MW reference wind turbine for offshore system development. Technical report, NREL/TP-500-38060. Golden, Colorado: National Renewable Energy Laboratory.
Jonkman, J. M., and Buhl, M. L. (2005). FAST user’s guide. Technical report, NREL/EL-500-38230. Golden, Colorado: National Renewable Energy Laboratory.
Lendek, Z., Guerra, T. M., Babuška, R., and De Schutter, B. (2010). Stability analysis and nonlinear observer design using takagi-sugeno fuzzy models. Berlin: Springer-Verlag Berlin Heidelberg.
Li, S., Yang, J., Chen, W.-H., and Chen, X. (2014). Disturbance observer-based control: Methods and applications. 1st edition. Boca Raton: CRC Press Taylor and Francis Group.
Luenberger, D. G. (1971). An introduction to observers. IEEE Trans. Autom. Contr. 16, 596–602. doi:10.1109/tac.1971.1099826
Luenberger, D. G. (1964). Observing the state of a linear system. IEEE Trans. Mil. Electron. 8, 74–80. doi:10.1109/tme.1964.4323124
Lyapunov, A. M. (1992). The general problem of the stability of motion. Int. J. Control 55, 531–534. doi:10.1080/00207179208934253
Ma, X.-J., Sun, Z.-Q., and He, Y.-Y. (1998). Analysis and design of fuzzy controller and fuzzy observer. IEEE Trans. Fuzzy Syst. 6 (1), 41–51. doi:10.1109/91.660807
Ma, X., Poulsen, N. K., and Bindner, H. (1995). Estimation of wind speed in connection to a wind turbine. Technical report. The Technical University of Denmark.
Ostergaard, K. Z., Brath, P., and Stoustrup, J. (2007). Estimation of effective wind speed. J. Phys. Conf. Ser. 75, 012082. doi:10.1088/1742-6596/75/1/012082
Pöschke, F., Gauterin, E., Martin, K., Fortmann, J., and Schulte, H. (2020). Load mitigation and power tracking capability for wind turbines using a non-linear model-based controller. Wind Energy 23, 1792–1809.
Pöschke, F., Gauterin, E., and Schulte, H. (2019). “Lmi region-based nonlinear disturbance observer with application to robust wind turbine control,” in New trends in observer-based control, emerging methodologies and applications in modelling, identification and control. Editors O. Boubaker, Q. Zhu, M. Mahmoud, J. Ragot, H. Reza Karimi, and J. Dávila 1 edition (Elsevier Books), 35–75.
Pöschke, F., Petrović, V., Berger, F., Neuhaus, L., Hölling, M., Martin, K., et al. (2022). Model-based wind turbine control design with power tracking capability: a wind-tunnel validation. Control Eng. Pract. 120, 105014. doi:10.1016/j.conengprac.2021.105014
Rauh, A., Dehnert, R., Romig, S., Lerch, S., and Tibken, B. (2021). Iterative solution of linear matrix inequalities for the combined control and observer design of systems with polytopic parameter uncertainty and stochastic noise. Algorithms 14, 205. doi:10.3390/a14070205
Schlipf, D., Fischer, T., Carcangiu, C. E., Rossetti, M., and Bossanyi, E. (2010). “Load analysis of look-ahead collective pitch control using lidar,” in Deutsche Windenergiekonferenz DEWEK, Bremen, Germany.
Schulte, H., and Gauterin, E. (2015). Fault-tolerant control of wind turbines with hydrostatic transmission using takagi-sugeno and sliding mode techniques. Annu. Rev. Control 40, 82–92. doi:10.1016/j.arcontrol.2015.08.003
Takagi, T., and Sugeno, M. (1985). Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man. Cybern. 15 (1), 116–132. doi:10.1109/tsmc.1985.6313399
Tanaka, K., and Wang, H. O. (2001). Fuzzy control systems design and analysis: A linear matrix inequality approach. New York: John Wiley & Sons.
Tanaka, K., Ikeda, T., and Wang, H. (1998). Fuzzy regulators and fuzzy observers: relaxed stability conditions and LMI-based designs. IEEE Trans. Fuzzy Syst. 6, 250–265. doi:10.1109/91.669023
Tanaka, K., and Sano, M. (1994). A robust stabilization problem of fuzzy control systems and its application to backing up control of a truck-trailer. IEEE Trans. Fuzzy Syst. 2 (2), 119–134. doi:10.1109/91.277961
Tanaka, K., and Sano, M. (1994). “On the concept of fuzzy regulators and fuzzy observers,” in IEEE Conference on Fuzzy Systems, Orlando, FL, 767–772.
Tanaka, K., and Sugeno, M. (1992). Stability analysis and design of fuzzy control systems. Fuzzy Sets Syst. 45 (2), 135–156. doi:10.1016/0165-0114(92)90113-i
Tanaka, K., and Wang, H. O. (1997). “Fuzzy regulators and fuzzy observers: a linear matrix-inequality approach,” in IEEE International Conference on Decision and Control, San Diego, CA, 1315–1320.
VanAntwerp, J. G., and Braatz, R. D. (2000). A tutorial on linear and bilinear matrix inequalities. J. Process Control 10, 363–385. doi:10.1016/s0959-1524(99)00056-6
Wang, H. O., Tanaka, K., and Griffin, M. F. (1996). An approach to fuzzy control of nonlinear systems: stability and design issues. IEEE Trans. Fuzzy Syst. 4 (1), 14–23. doi:10.1109/91.481841
Wang, H. O., Tanaka, K., and Griffin, M. F. (1995). “Parallel distributed compensation of nonlinear systems by takagi-sugeno fuzzy model,” in Proceedings of FUZZ IEEE/IFES’95, Yokohoma, Japan, 531–538.
Yoneyama, J., Nishikawa, M., Katayama, H., and Ichikawa, A. (1998). Output stabilization of takagi sugeno fuzzy systems. FUZZY sets Syst. 111, 253–266. doi:10.1016/s0165-0114(98)00121-3
Zemouche, A., Zerrougui, M., Boulkroune, B., Rajamani, R., and Zasadzinski, M. (2016). “A new lmi observer-based controller design method for discrete-time lpv systems with uncertain parameters,” in 2016 American Control Conference, Boston, MA, 2802–2807.
Appendix
Specification of all steady operation points OPi
In Table A1 all steady Operation Points OPi of this work are listed.
Specification of the component submodels
In Tables A2–A8, all matrices and steady states are listed, necessary to replicate the achieved results of this work with the help of NREL FAST 5MW reference wind turbine simulation software (see NREL (XXXX), Jonkman and Buhl (2005) and Jonkman et al. (2009)). Note: As the disturbing wind time series and excitation, respectively is restricted to wind speeds from v = 14m/s to v = 16m/s, the corresponding i submodels are restricted to i ∈ (Lendek et al., 2010; Jonkman and Jonkman, 2016) (see also explanation in Section 3.2).
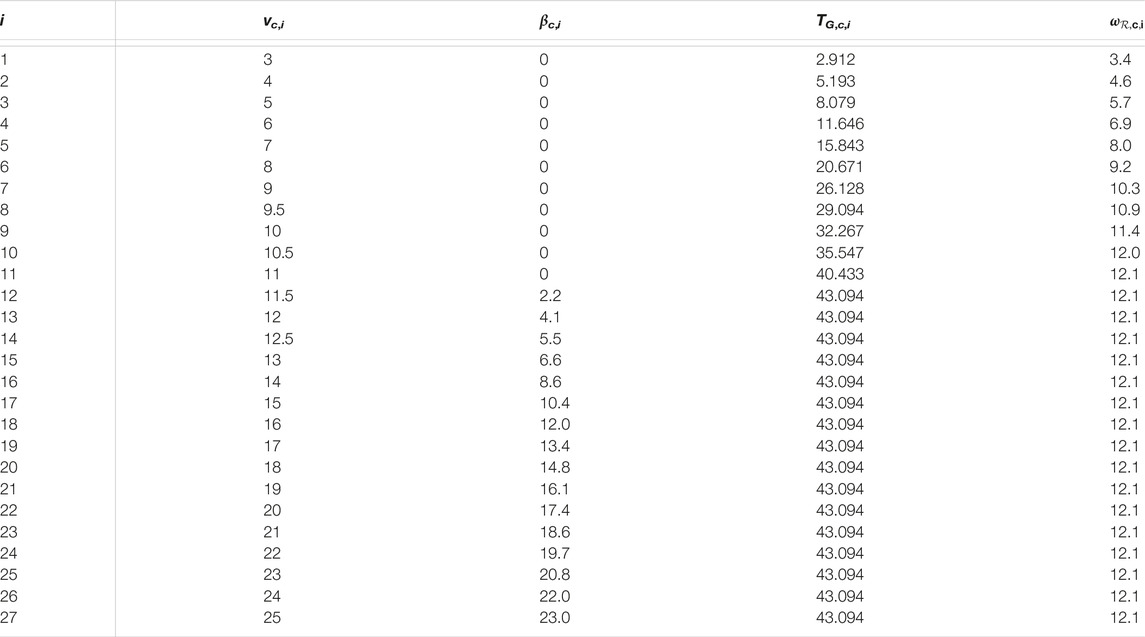
TABLE A1. States of the i steady state operations points OPi of the NREL FAST 5MW reference wind turbine with the wind speed vc,i, rotor rotational speed
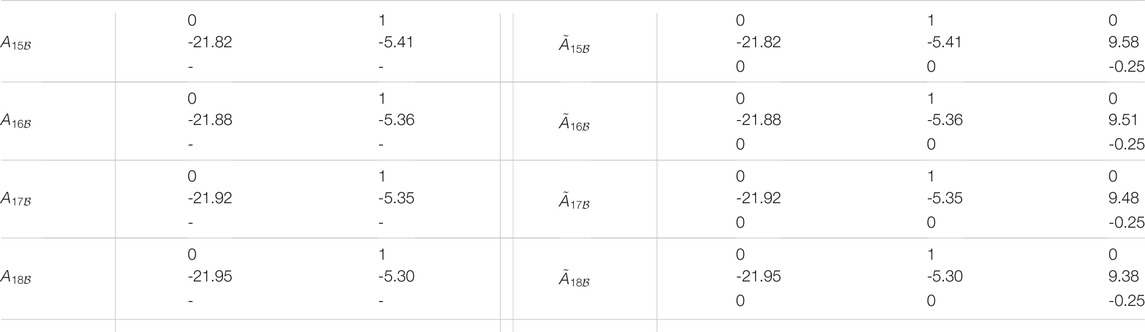
TABLE A2. State matrices
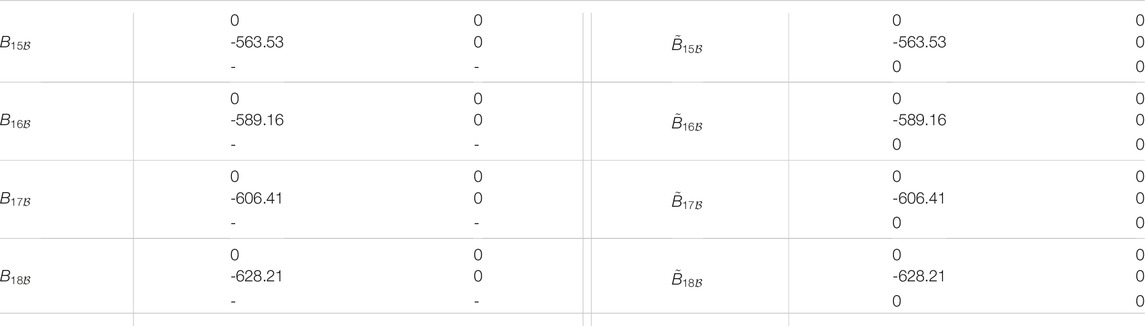
TABLE A3. Input matrices

TABLE A4. Common output matrix
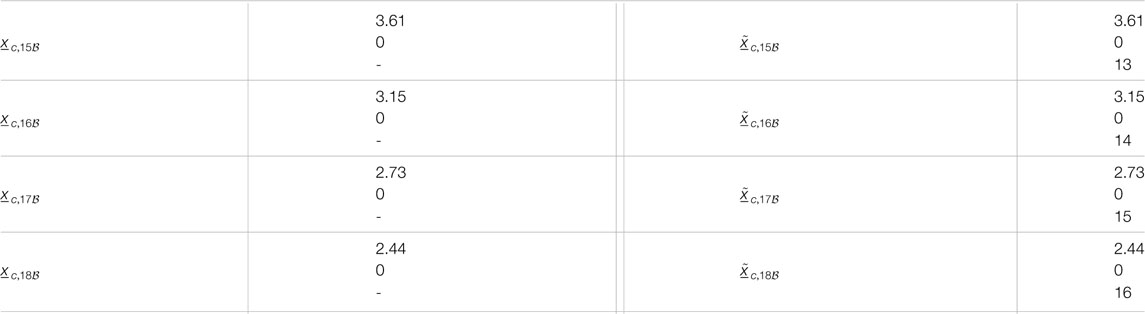
TABLE A5. Steady states
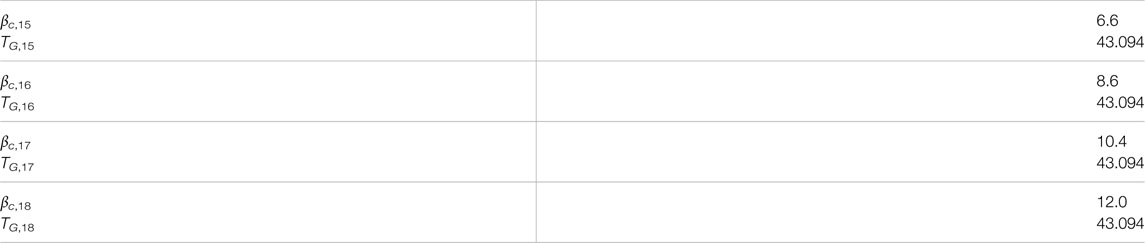
TABLE A6. Steady state pitch angle βc,i and generator torque TG,i (for the submodels i ∈ [15,18]).

TABLE A7. State feedback matrices
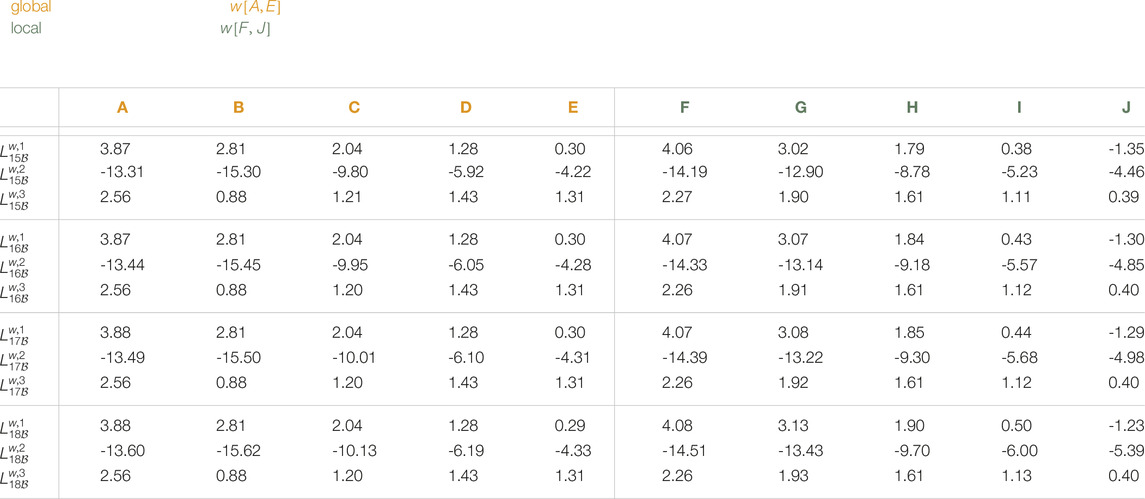
TABLE A8. Error state feedback gain matrices
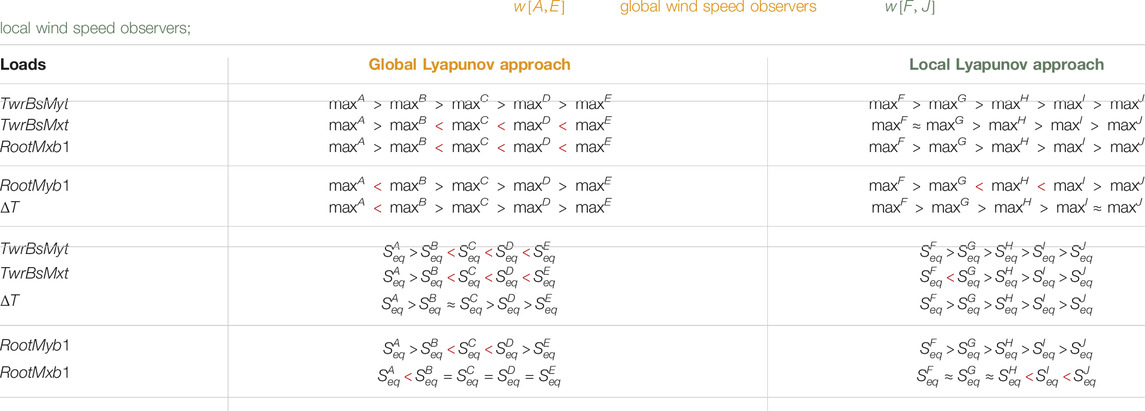
TABLE A9. Analysis of the ultimate loads maxw and fatigue loads

TABLE A10. Analysis of the ultimate loads maxw and fatigue loads
All states and parameters are expressed in SI units, despite the generator torque TG (that is expressd in kNm), pitch angles (that are expressed in (angular) degree) and the rotation speed (expressed in revolution per minute).
Specification of the LMI constraints
Restrictions for the decay rates αmin / max and natural frequencies of the system response (characterised by the real part and imaginary part of the closed-loop poles Re(sP,i) and Im(sP,i)) can be specified with bounds, e.g. with horizontal lines (with αmax < Re(sP,i) < αmin)) and diagonal origin lines (with
In (Chilali and Pascal, 1996), LMI representations for these bounded pole map segments, i.e. the restricted location of the poles and eigenvalues of a linear system, respectively, are derived.
For the upper vertical bound
and for the lower vertical bound
For the cone angle bound θ of the error dynamics, based on the blade design model, the following LMI holds:
The matrices used in (23) to (25) are listed in Tables A2, A4, A8.
All simulations were executed with the controller ct1210013. The following global Lyapunov approach based wind speed observers were used: A ≡ ot1210027, B ≡ ot1210030, C ≡ ot1210033, D ≡ ot1210051, E ≡ ot1210049, F ≡ ot1210036, G ≡ ot1210039, H ≡ ot1210042, I ≡ ot1210043, J ≡ ot1210044.
The state observer ot1010001 was utilised.
For the wind excitation the Imp14.hh wind time series is used.
To calculate the mean Euclidian norm
Load analysis
For the ultimate loads
Keywords: global and local Lyapunov approach, Takagi–Sugeno framework, model-based controller and observer design, feedforward-feedback control, linear-matrix-inequality and pole region-based controller design, wind turbine application, elaborated wind turbine simulation model, load analysis
Citation: Gauterin E, Pöschke F and Schulte H (2023) Global Versus Local Lyapunov Approach Used in Disturbance Observer-Based Wind Turbine Control. Front. Control. Eng. 3:787530. doi: 10.3389/fcteg.2022.787530
Received: 30 September 2021; Accepted: 14 June 2022;
Published: 06 February 2023.
Edited by:
Andreas Rauh, University of Oldenburg, GermanyReviewed by:
Robert Dehnert, University of Wuppertal, GermanyJános Zierath, W2E Wind to Energy GmbH, Germany
Copyright © 2023 Gauterin, Pöschke and Schulte. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Eckhard Gauterin, Z2F1dGVyaW5AaHR3LWJlcmxpbi5kZQ==