Original Research
Published on 14 Nov 2016
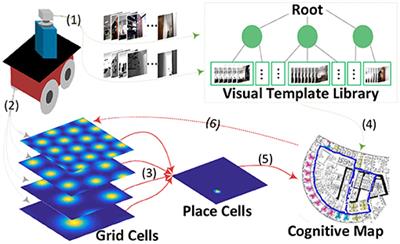
An Odometry-Free Approach for Simultaneous Localization and Online Hybrid Map Building
in Smart Sensor Networks and Autonomy
Frontiers in Robotics and AI
doi 10.3389/frobt.2016.00068
- 4,620 views
- 1 citation