Original Research
Published on 29 Aug 2022
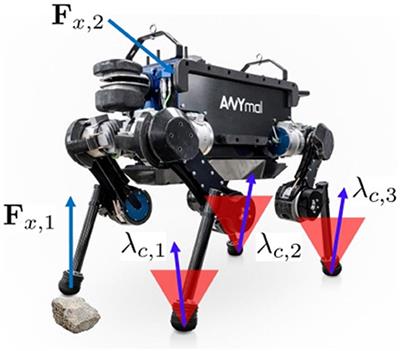
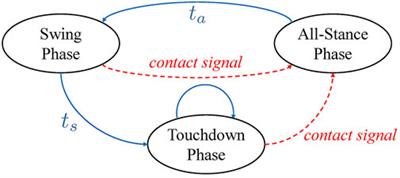
Variable stiffness locomotion with guaranteed stability for quadruped robots traversing uneven terrains
in Robotic Control Systems
Frontiers in Robotics and AI
doi 10.3389/frobt.2022.874290
- 9,230 views
- 7 citations