Original Research
Published on 22 Mar 2021
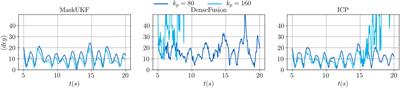
MaskUKF: An Instance Segmentation Aided Unscented Kalman Filter for 6D Object Pose and Velocity Tracking
in Humanoid Robotics
Frontiers in Robotics and AI
doi 10.3389/frobt.2021.594583
- 8,030 views
- 13 citations