 Paul Ha
Paul Ha Sikai Chen
Sikai Chen Runjia Du
Runjia Du Jiqian Dong
Jiqian Dong Yujie Li
Yujie Li Samuel Labi
Samuel Labi- 1Center for Connected and Automated Transportation (CCAT), Lyles School of Civil Engineering, Purdue University, West Lafayette, IN, United States
- 2Robotics Institute, School of Computer Science, Carnegie Mellon University, Pittsburgh, PA, United States
The evolution of scientific advances has often been characterized by the amalgamation of two or more technologies. With respect to vehicle connectivity and automation, recent literature suggests that these two emerging transportation technologies can and will jointly and profoundly shape the future of transportation. However, it is not certain how the individual and synergistic benefits to be earned from these technologies is related to their prevailing levels of development. As such, it may be considered useful to revisit the primary concepts of automation and connectivity, and to identify any current and expected future synergies between them. Doing this can help generate knowledge that could be used to justify investments related to transportation systems connectivity and automation. In this discussion paper, we attempt to address some of these issues. The paper first reviews the technological concepts of systems automation and systems connectivity, and how they prospectively, from an individual and collective perspective, impact road transportation efficiency and safety. The paper also discusses the separate and common benefits of connectivity and automation, and their possible holistic effects in terms of these benefits where they overlap. The paper suggests that at the current time, the sibling relationship seems to be lopsided: vehicle connectivity has immense potential to enhance vehicle automation. Automation, on the other hand, may not significantly promote vehicle connectivity directly, at least not in the short term but possibly in the long term. The paper argues that future trends regarding market adoption of these two technologies and their relative pace of advancement or regulation, will shape the future synergies between them.
Introduction
Throughout the ages, scientific advancements have emerged largely through the amalgamation of two or more technologies from different disciplines including material science, control systems, mechanical systems, computer technology, information technology, and so on. Specific examples of sibling pairs include computer hardware and software, the automobile and road pavement, and the automobile and electric battery technology. These sibling relationships, similar to interspecies interaction or symbiosis in the field of biological science (Trager et al., 1988) can be placed in one of at least two categories: (i) mutualism (where each concept directly promotes the other at a given time) and (ii) commensalism (where concept A promotes concept B at a given time but concept B does not significantly or necessarily promote concept A at that time). In the field of computing, the relationship between computer hardware and software can be described as mutualistic. A classic example of commensalism is the automobile and its means of propulsion. The first automobile developed in the late nineteenth century, was powered using a large steam engine; however, with the development of the internal combustion engine or ICE, auto manufacturers were provided an opportunity to produce automobiles that were smaller and less unwieldy (Eckermann, 2001). This can be considered an example of a commensal relationship at that time because the ICE fostered directly the development of automobiles, while the effect of automobile development of ICE advancement, if any, was only indirect and drawn out over time (due to, for example, scale economies). Similar observations of mutualistic or commensal relationships can be found in road transportation (the automobile and pavement material science) and electric vehicles (the automobile drivetrain and battery technology), shared transportation [vehicle systems and information and computer technologies (ICT)], and truck electronic platooning (truck vehicles and ICT).
In this paper, we address the sibling relationship between the concepts of automation and connectivity in the specific context of road transportation vehicles. Connectivity is the capability of a vehicle to communicate to and from (and therefore, share information with) other systems (vehicles, infrastructure, roadside units, data portals, cyclists and pedestrians, and so on) that are located outside of the vehicle, via various relatively short- and long-range connectivity technologies (FCC, 2019). An automated vehicle is one that is capable of self-navigation from an origin to a user-specified destination. Synonyms or near-synonyms include self-driving, autonomous, driverless, and highly automated vehicles. This type of vehicle relies on sensors and communication protocols and software that allow the vehicle to comprehensively characterize its physical and operating environment, thereby making the vehicle capable of quickly learning from previous experiences and adapting to its environment and thence making driving decisions (USDOT, 2019). In subsequent sections of this paper, we provide a fuller discussion of these two concepts.
The paper's discussion of the synergies of the sibling relationship between connectivity and automation is made in the context of transportation vehicles. The paper not only recognizes that the technological concepts of automation and connectivity share the common goals of transportation system efficiency and safety, but also argues that vehicle connectivity has immense potential to enhance vehicle automation. On the other hand, automation per se, may not significantly promote vehicle connectivity in the short term but may do so in the long term, as growing market shares of autonomous vehicles may likely spur investments in connectivity research and development. In the paper, we first present a synopsis of vehicle connectivity and vehicle automation, and then discuss the ways in which connectivity will be expected to enhance the operations of autonomous vehicles. A few future trends and advancements in connectivity and automation are discussed, and we speculate the future shape of the connectivity-automation sibling relationship.
A Synopsis of the Concepts
Vehicle Connectivity
Vehicle connectivity can be viewed as a subset of the communications paradigm known as the Internet of Things (IoT), which equips everyday objects with the ability to transmit and receive data for improved ease of use and efficiency (Xia et al., 2012). A vital component of a smart city is a transportation network that operate intelligently to improve the mobility, efficiency, and safety of the users and the city residents in general. Connected vehicles (CVs) can help realize the goals of a smart city through the transmission of information from various components of the smart city. Connectivity may be uni-directional or bi-directional. The former includes global positioning systems and radio, and the latter (and respective application areas) includes DSRC for safety, cellular for communications and diagnostics, Wi-Fi for information, Near Field Communication for authentication, and Bluetooth for entertainment. The origins and destinations include vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I), and vehicle-to-cloud (V2C) communications. Connectivity can be facilitated by the use of roadside units (RSUs), connected computation units that perform heavy computational tasks (Sou and Tonguz, 2011).
A large number of studies have shown (or, at least, discussed the prospect of) the connectivity capability of vehicles and its role in providing significant improvements to the transportation system in terms of safety, mobility, and efficiency (Goodall et al., 2013; Lu et al., 2014; Uhlemann, 2015; Talebpour and Mahmassani, 2016; Mohd Zulkefli et al., 2017; Zheng and Liu, 2017; Chen, 2019; USDOT, 2019; Dong et al., 2020a; Du et al., 2020; Li et al., 2020a). While cetain specific benefits pertain to individual connected vehicles, much of the systemic and systemwide benefits to the transportation system are expected be manifest when CV market adoption is high (Ma et al., 2012; Lu et al., 2014, 2015; Khondaker and Kattan, 2015; Auld et al., 2017; Zheng and Liu, 2017).
At the current time, communication protocol types include Bluetooth, Wi-Fi, Satellite, DSRC, and Cellular-5G. The advancement of vehicle connectivity technology is still evolving, and the appropriate communication protocol has been subject to various changes and modifications with ongoing debate about the best approach for specific applications. In 1999, the US Federal Communications Commission (FCC) reserved a 75 MHz band at the 5.850–5.925 GHz spectrum exclusively for communication of intelligent transportation systems. While the network topology has changed, this band for ITS use has been termed the dedicated short-range communications (DSRC) range. The purpose of providing the DSRC was to enable ubiquitous V2V and V2I communications that can improve operations and safety (Uhlemann, 2015). However, due to the relatively slow evolution and implementation of the provided band for vehicle connectivity, the FCC recently initiated a Notice of Proposed Rulemaking (NPRM) to reallocate the 5.9 GHz band for unlicensed operations such as wi-fi. The upper 30 MHz of the band is intended to be used to support ITS needs, with 20 MHz being used for Cellular Vehicle to Everything (C-V2X) operations, which can build on the cellular protocols such as 4G or 5G (FCC, 2019). As C-V2X is still in a nascent stage of development, the effect of the band reduction on the efficacy of communication is still yet to be seen.
In recognizing the findings of past research regarding the prospective benefits of vehicle connectivity to various users and stakeholders of the traditional transportation system, this section of the paper presents the direct and indirect effects of connectivity and the details of possible systemic enhancements. As a prelude to the discussion, this paper categorizes the relevant classes of vehicles as follows: traditional, conventional, or “isolated” vehicles (IVs) which do not possess any automation or connectivity; connected human-driven vehicles (CHDVs), which are human-driven vehicles with connectivity to other entities (such as vehicles, pedestrians, and infrastructure); and automated or autonomous vehicles (AVs), which are automated driving systems which may or may not possess connectivity. It is worth noting that the literature contains several other classifications of new generation vehicles based on other criteria including the propulsion mechanism (for example, fossil fuel and electric) and vehicle ownership or deployment/usage status, for example, individually owned, shared ownership, or shared use (Chalk et al., 1996; Clewlow and Mishra, 2017; Menon et al., 2019; Payalan and Guvensan, 2019).
In the United States, the Department of Transportation has been a key proponent of driving CV technology forward to appreciate and measure the benefits of connectivity and to accelerate their integration into transportation systems operations (Association of Metropolitan Planning Organizations, 2019). For human drivers, connectivity yields a plethora of features and improvements to the human-driven vehicle (Chang et al., 2015; Guériau et al., 2016). A highly anticipated benefit is improved safety (Papadoulis et al., 2019; Rahman et al., 2019). Typically, due to the unpredictability of the movements of neighboring vehicles in a traffic stream, a human driver must rely on their perception-reaction time to address unforeseen situations. Vehicle connectivity potentially improves driving performance in at least two ways: (1) reduction of certain components of the driver's perception-reaction time; and (2) reduction in the sources and intensities of uncertainty in the way other vehicles move in the traffic stream. For example, a connected vehicle can process information and alert its driver and other drivers of downstream hazards much quicker compared to a non-connected vehicle. Currently, there exist advanced vehicle systems to reduce human driver perception-reaction time, such as collision warning; nevertheless, these systems work with limited range capability and arguably, can be only as effective as onboard sensors (Dagan et al., 2004). Therefore, vehicle connectivity provides the human driver with a capability to recognize potential hazards located beyond the driver's range of vision or the effective range of onboard sensors, and helps them share this information with other vehicles beyond these ranges. For example, imminent collisions that may be caused by poor lines of sight (for example, at intersections, inclement weather including fog, or occlusion due to driving behind/near large vehicles) can be avoided due to the extra vehicle awareness made possible through connectivity (USDOT, 2016). Isolated (non-connected human-driven) vehicles can also earn the safety benefits of vehicle connectivity because reductions in collision propensity due to connectivity, reduces the likelihood of secondary multi-vehicle collisions upstream (Yang et al., 2017).
Another anticipated system-wide benefit of connectivity is the improvement to routing efficiency and departure time optimization (Talebpour and Mahmassani, 2016; Liang et al., 2017; Wang et al., 2017). Through their connectivity capabilities, CVs can receive real-time information from other vehicles already in the road network regarding road hazards, weather effects, crashes, and other congestion-related events (Filipovska et al., 2019). While traditional routing and navigational software can provide similar information, they do so with some delay. Such delay could be considered a significant shortcoming because sharing of the newly-calculated route with all drivers potentially creates new areas of congestion, and in some cases, such translocation of congestion from one area to another results in worsened overall congestion (Macfarlane, 2019). With vehicle connectivity, it is possible to reroute collaboratively from a central controller so that congestion translocation is avoided (De Souza et al., 2016; Yang and Oguchi, 2018). Alternatively, for less urgent trips, connectivity capabilities can make the driver aware of the optimal (as well as alternative) times for starting a trip, thereby enhancing driver convenience, and possibly, reduced fuel consumption, and improved safety.
There also exist potential systemwide benefits to transportation agency management functions (Hill and Garrett, 2011; USDOT, 2016). It is speculated that with increased percentages of connected vehicles on their networks, transportation agencies will have increased opportunity to collect real-time data on the characteristics and movements of vehicles in the network. With vehicle connectivity, such data collection can be supported significantly, as disaggregate information on the attributes of individual connected vehicles throughout the network can be obtained easily and quickly through V2I systems (Myr, 2002; De Souza et al., 2016). This could yield a rich database of the physical and operational characteristics of individual vehicles including classification, speed, location, and lane position, for all vehicles in a specified network.
Besides these two broad categories of connectivity benefits, there exist various operational performance improvements that connectivity capabilities offer at the microscopic level. An example is speed harmonization (SH), which can be used by the road transportation agency to mitigate congestion prior to a bottleneck or road incident or obstacle. Several SH approaches exist in the literature but they all share a common tri-partite structure: traffic flow prediction, categorization of flow breakdown, and implementation of remedial measures to reduce or eliminate the predicted flow breakdown. Traditionally, SH is achieved through loop detector data and statistical and machine learning models for predicting downstream flow followed by upstream strategic interventions (Ma et al., 2016; Mahmassani, 2016; Filipovska et al., 2019). However, recent studies have investigated the extent to which SH, conducted with rich data fed to vehicles through connectivity, can be significantly improved (Ramezani and Benekohal, 2015; Dowling et al., 2016; Ghiasi et al., 2017; Tajalli and Hajbabaie, 2018; Malikopoulos et al., 2019; Ha et al., 2020).
Further, connectivity capabilities can provide opportunities for traffic signal control and optimization (Goodall et al., 2013; Ilgin Guler et al., 2014; Feng et al., 2015; Zheng and Liu, 2017; Liang et al., 2020). Specifically, Goodall et al. (2013) found through simulations that their algorithm (which uses data obtained through connectivity) helped improve traffic signal system performance and also eliminated the need for retiming signals. Further, Ilgin Guler et al. (2014) found through simulations that uses information obtained through connectivity (at 60% penetration of CVs) can result in significant reductions in average delay at a given intersection. For example, through connectivity, drivers at or approaching an intersection could receive information regarding the time-to-green or the remaining green time at an intersection, thereby adjusting their driving behavior to smoothen their movement along the signalized arterial.
With regard to non-connected or isolated vehicles (IVs) that is, non-connected vehicles, even though they lack communication capabilities, they can still earn significant benefits from an overall CV-rich traffic stream. With connectivity capabilities, vehicles can react quickly and even cooperatively during crash-imminent situations from any reckless IV operational manuvers, to reduce collision risk or severity. Therefore, as previously discussed in an earlier section of the paper, connected vehicles can improve the safety of the transportation system as a whole, thus allowing IVs to operate in an environment with much reduced crash risk. Also, from an operational efficiency perspective, IVs will likely be able to access some of the real-time traffic data to improve their routing decisions. For example, while current navigational systems (which are accessible by IVs) provide route options based on predicted and estimated traffic conditions, the rich, real-time data from CVs may be integrated into these navigation systems.
Vehicle Automation
A fully autonomous vehicle (AV) is a vehicle that can characterize its immediate environment and navigate the roadway without human driver input. For sensing, it uses technologies including radar, lidar, sonar, and GPS, and for driving, it uses an AI-based control system. The environment includes the roadway, other vehicles on the roadway, the roadside and pedestrians by or crossing the road, and other natural or man-made features and obstacles on the roadway and roadside. Upon receiving the sensed information, a control system interprets this information using AI techniques to identify the elements of its environment (the guideway, other vehicles, traffic signs, lane markings, and obstacles) and to design a suitable navigation path for its travel. The sensed information may be complemented by information received from other vehicles, infrastructure, pedestrians, and other sources. When equipped with such capabilities, the autonomous vehicle is termed a connected autonomous vehicle (Chen et al., 2020). In order to build or maintain public trust in AVs, it is essential that AVs is capable of safe operations in a wide gamut of natural or man-made environmental conditions including the traffic stream, and particularly, in the event of system failure. In this regard, the Operational Design Domain (ODD) defines the domain over which the automated vehicle can operate safely (Czarnecki, 2017; Koopman and Fratrik, 2019).
AV synonyms include automated, self-driving, driverless robocar, and robotic car. Some agencies and researchers take pains to distinguish between these synonyms. For example, the term “automated” means control or operation with the aid of a machine, for example, systems for speed control, emergency braking, adaptive cruise control, blind spot detection, electronic stability, forward collision warning, lane keeping assist, and rearview video monitoring. The term “autonomous” means the capability to act alone or independently. The Society of Automotive Engineers (SAE) argues that the word autonomy has implications beyond the electromechanical, and that a fully autonomous car is one that is self-aware and therefore is capable of making its own choices or destination and route. SAE argues that a fully autonomous vehicle may decide to take you to a location of its choice, one that is different from where you intend to go, whereas a fully automated car, however, would follow orders and then drive itself. On the other hand, one could argue that even with this definition, as long as a car can choose its route to a given destination (which is possible with today's technology), it is autonomous. It is even possible, with current technology, for a vehicle to choose a destination by itself; for example, by learning from stored information regarding its owner's destination every Monday morning for the past 5 years, the vehicle can drive the owner to that destination next Monday morning even without being instructed to do so by the owner. The SAE defines 6 levels of driving automation (Table 1) that range from 0 (fully manual) to 5 (fully autonomous). These levels have been adopted by the U.S. Department of Transportation and the National Highway Traffic Safety Administration.
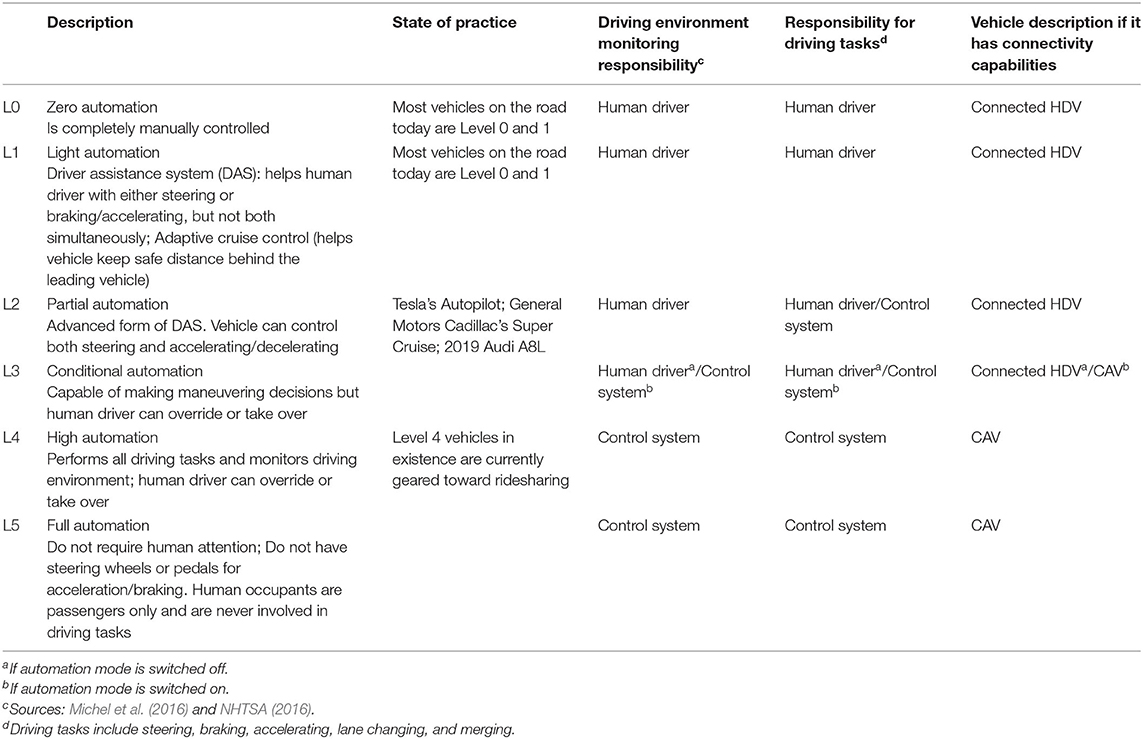
Table 1. SAE Levels of autonomy, driving task responsibility, and connectivity relationship.
Promoting Automation Using Connectivity
As mentioned previously, vehicle connectivity can serve as a natural catalyst for the advancement of autonomous vehicles (Hobert et al., 2015). It may be argued that AVs are inherently equipped with sensing capabilities and therefore may not require connectivity. However, the spatial ranges of traditional sensors are relatively limited, and communication with other vehicles and infrastructure via connectivity, can help the AV gain a more comprehensive awareness of its driving environment and thereby allow it to make informed driving decisions at strategic (route planning) or operational (lane changing) levels (Vinitsky et al., 2018). While human drivers of CVs cannot make decisions based on all of the rich data made available through connectivity, connected AVs (CAVs) can quickly process such large amounts of information and thereby exhibit superior driving performance. This has been confirmed by several researchers who argued that V2X connectivity capabilities can significantly enhance the operational performance of AVs (Duell et al., 2016; Kreidieh et al., 2018; Stern et al., 2018; Huegle et al., 2019; Dong et al., 2020b; Li et al., 2020b). These researchers demonstrated that the interactions between AVs and connected human-driven vehicles (CHDVs) present several opportunities where connectivity can enrich AV performance. From their results and discussions, a common thread, it seems, is that the addition of connectivity to automation has the potential to significantly improve automation. This is because such the ability to share data enhance the AV's strategic, tactical, and operational decisions, and consequently, improve AV performance from individual-vehicle or system-wide perspectives.
Contextual examples of such decisions where connectivity could aid in autonomous operations at the systemwide perspective includes platooning and fleet management. Platooning, allows a stream of trucks to communicate via connectivity in order to operate with minimal headways, leading to higher speeds, and increased efficiency and trucking productivity (Al Alam et al., 2010; Tientrakool et al., 2011; Bergenhem et al., 2012; Ma et al., 2012; Amoozadeh et al., 2015; Maiti et al., 2017). Ma et al. (2012) found that a traffic stream of vehicles with advanced cooperative adaptive cruise control can improve fuel efficiency of vehicles and reduce stop-and-go traffic. Tientrakool et al. (2011) used simulation to explore the potential improvements to highway capacity due to platooning, and found that the resulting capacity increase can reach up to almost 3-fold of the traditional capacity. Al Alam et al. (2010) explored the potential fuel savings benefits from platooning of heavy-duty vehicles such as trucks. However, these studies found that the benefits depend on the market penetration of the connected trucks. In yet another example of system-wide decisions—the context of centralized decision making of CAV fleets—Hyland and Mahmassani (2018) assessed strategies for dispatching and assigning CAVs as on-demand mobility services. In their study, a centralized decision maker dispatched, assigned, and reassigned CAVs to riders requesting the mobility service. They determined that in such contexts, centralization (made possible through connectivity capabilities) is critical for optimizing the system performance of the AV fleet.
From an individual vehicle rather than systemwide perspective, connectivity can help improve the performance of AVs (Feng et al., 2015; Zhu and Ukkusuri, 2015; Lin et al., 2017; Dong et al., 2020c). In reinforcement learning based autonomous driving systems, for example, the level of cooperation between vehicles in the traffic stream influences the level of benefits that automated or autonomous vehicles could earn from connectivity. Huegle et al. (2019) developed a deep reinforcement learning (DRL) based autonomous driving system that communicates with connected human-driven vehicles in order to execute lane-change maneuvers. The researchers showed that a dynamic input of the information obtained via connectivity is useful in training an efficient autonomous driving model.
Arguing that connectivity means connected roads not just connected vehicles, Anderson et al. (2016) stated that any difficulty in constructing and maintaining highly accurate maps of connected roads, could limit the routes on which AVs can drive, and therefore could jeopardize the benefits of vehicle automation (Anderson et al., 2016). These researchers carried out a survey of transportation professionals in 2015, and stated that the interviewees agreed that communications and telematics are essential features of AVs, though there was some disagreement about (a) the specific means (e.g., DSRC, Long-Term Evolution) by which this communication would occur, and (b) the extent to which it is necessary for an AV to rely on data received from other cars. There is an ongoing debate regarding the sufficiency of sensing for AV operations, as some stakeholders have repudiated the notion that connectivity will play a critical and catalytic role for AV operations. The KPMG and Center for Automotive Research (Silberg et al., 2012) stated that connected vehicle technology will be central to achieving AV operations, while certain stakeholders expressed the opinion that sensor-based systems will be adequate for AV operations (Anderson et al., 2016). Ruiz (2020) argued that “connectivity is the key to early wins in automated mobility” and according to Anderson et al. (2016), some CAV stakeholders have opined that “an autonomous car is still going to be a connected car” and that “as AV technology improves, it will spur further demand for connectivity.”
The prospective benefits of connectivity to AVs can be viewed from at least one of several perspectives: privately-owned vs. fleet-owned CAVs, CAVs with centralized vs. decentralized controls, and CAVs with cooperative vs. non-cooperative decision making, and so on. Table 2 presents a few examples.

Table 2. Examples of the benefits of connectivity-aided automation.
Promoting Connectivity Using Automation
From the discussions in the previous section, it seems clear that connectivity capabilities are expected to greatly enhance the automation function of vehicles and benefits thereof. However, the reverse is not so obvious, at least not in the current era. Automation may help provide a stronger justification for connectivity but is not likely enhance the ease or smoothness of information flow between connected entities. On the other hand, automation can enhance the benefits of connectivity. For example, compared to a human driven vehicle, an automated vehicle can process much faster and more reliably, the information obtained from connectivity, and therefore to make safer and more efficient driving decisions based on this information. This provides stronger justification for adding connectivity capabilities to vehicles that are automated. In addition, as the market share of AVs grows, and the safety and mobility benefits of connectivity (not only to the AV but also to connected HDVs) become more obvious, owners of non-connected HDVs will be increasingly motivated to install connectivity in their vehicles. In the long term, the increase in connectivity demand and volume of production can be expected to lead to reduced unit costs of connectivity due to economies of scale. Further, the prospective growth in autonomous vehicle market shares can help spur investments in connectivity research and development, and ultimately yield less costly and more effective connectivity capabilities.
Synergies of the Connectivity-Automation Benefits
It can be argued that the synergies between automation and connectivity, and the level of benefits that could be earned thereof, is a function of the level of advancement of each of these two concepts, and the gap between them. It is not enough to talk about the level of advancement only because without implementation, the benefits of such advancement will not be realized. Therefore, it is worth discussing implementation challenges that face AVs and CVs. With regard to AVs, these include trust in automation, concerns about vehicle safety (which profoundly influence consumers' perceptions of these technologies); hardware and software failures (which tend to be sudden and catastrophic); perceptual and reasoning errors (autonomous driving cannot be 100% error-free even with AI systems because it is impossible to test the system for all possible scenarios it could encounter in real life); handling highly dynamic and complex roadway environments including natural or man-made (fast moving traffic streams, pedestrian environments, and so on). With regard to CVs, implementation barriers currently include cellular coverage limitations, the proportion of vehicles equipped with DSRC, concerns about privacy and data security, and the consistency of favorable policies and continued support of national and state governments regarding communications-related policy and regulation.
From the perspective of vehicle connectivity and automation, vehicles could be placed in one of four class (Figure 1): Connected Human-driven Vehicles (CHDV), Connected Automated Vehicle (CAV), Human-driven Vehicle (HDV) and Automated Vehicle (AV).
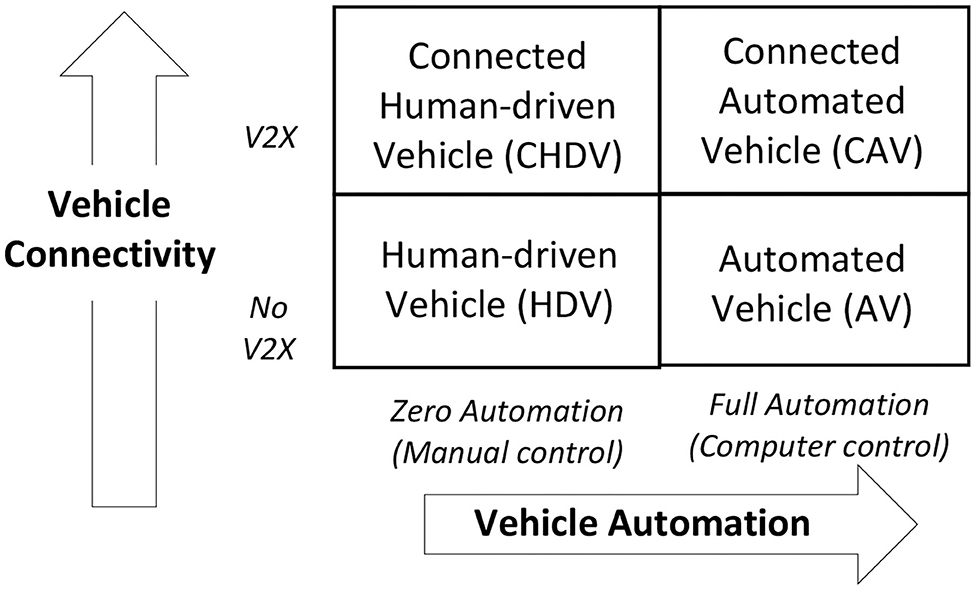
Figure 1. The Automation-Connectivity Matrix.
Figure 2, which presents another perspective of automation-connectivity classification that is somewhat different from Figure 1, shows the CV and AV benefits and synergies. A number of researchers maintain that human driven vehicles that have connectivity capabilities, are able to maintain efficient headways and therefore improve traffic flow stability and efficiency, particularly at high-speed sections (Van Arem et al., 2006; Shladover et al., 2012; Fagnant and Kockelman, 2014; Litman, 2014; Talebpour and Mahmassani, 2016). Electronic platooning of trucks, for example, which is possible by connectivity among trucks, also helps reduce energy use and lowers emissions. Automated and autonomous vehicles can help reduce significantly, the drivers responsibility for driving tasks. Also, AVs are expected to drop off their passengers directly at their destinations, return empty to their residences or to a parking garage located further away from downtown, and then return (when summoned) to pick up the passengers at the drop off location. Therefore, AVs are expected to cause reduction in first-mile last-mile (FMLM) distances and lowered out-of-vehicle travel time (OVTT), and reduced need for parking particularly at downtown locations. The benefits that are common between CV and AV include potentially reduced congestion [though some debate remains on this topic due not only to a potential rise in total travel demand but also to the specter of “ghost” (or, zero occupancy) vehicle taking up valuable space in the traffic stream], increased safety, and traffic flow stabilization via speed harmonization (see shaded box). Of these common benefits, there are those where the interaction of connectivity and automation (see bold font) yields a combined benefit that may be greater than the sum of their individual benefits. For example, the impact of combined connectivity and automation on vehicle energy use has been investigated in recent research (Michel et al., 2016; Vahidi and Sciarretta, 2018). Yue et al. (2018) assessed the safety benefits of combined advanced driver assistance, connectivity and low-level automation systems in vehicles. It can be argued that the strength of the synergy (and hence, its benefits) could be a function of the prevailing level of automation, the prevailing level of connectivity, or the gap between their prevailing levels of advancement. In other words, some benefits may be more achievable when the connectivity and automation levels are low, others are realized when the levels are high, and yet others, when there is little gap in their relative levels of advancement.

Figure 2. CV and AV: Individual, overlapping, and synergistic benefits.
Concluding Remarks
In spite of the advancements in vehicle communication and automation technology and its well-studied impacts, there are significant challenges that must be addressed for safe and successful integration of connectivity and automation in road transport vehicles. As we discussed in an earlier section of this paper, one such significant concern is privacy. The USDOT states that personally-identifying information (PII) is not a part of the basic safety message data (BSM) (USDOT, 2019) meaning that information packets will not contain identification information. However, continuous transmission of personal vehicle trajectory data can be applied for policing and law enforcement purposes. This is a double-edged sword, because such capability could be used for great good but also great misdeed. For example, a connected vehicle that violates a traffic regulation can be identified and intercepted by law enforcement. However, this capability might be used by autocratic and non-democratic governments to stifle dissent, carry out unlawful surveillance on their citizens, and prey on their populations in other ways. This may result in the reluctance of people to purchase connected vehicles or to install connectivity in their traditional (non-connected) vehicles.
Another significant challenge to CV market adoption is a lack of standardized information delivery mechanism. Human factors researchers have investigated various effective and efficient mechanisms for information delivery to human drivers of connected vehicles (Sengupta et al., 2007; Lu et al., 2014; Uhlemann, 2015); nevertheless, there remains a need to study various levels of information types and resolutions, and the corresponding appropriate mechanism to deliver such information to the human driver. The primary issue is the sheer amount of data that becomes available to CVs. As we discussed in an earlier section of this paper, for connected AVs, such information inundation will pose less of a challenge (from a data processing standpoint) to AVs compared to HDVs as AVs will be able to process quickly the received information. For connected HDVs, any disaggregate information provided through connectivity may provide little or no operational benefits and may even distract the driver from the driving task. The exact mechanism of information delivery can incorporate tactile, auditory, and visual combinations at varying magnitudes and intensities. Therefore, to realize fully the benefits of connectivity, it is necessary to acquire a thorough understanding of how to aggregate the information and deliver it efficiently to the driver (of connected HDVs) or to the controller (of connected AVs) for a given situation.
Further, CVs face a lack of reliable communication protocol. The FCC recently announced its intention to reduce the DSRC band and change the protocol from 802.11p to C-V2X. While C-V2X (R15) is characterized by enhanced range and reliability, higher throughput, higher stability, and reduced latency (Qualcomm, 2017), the technology is still not mature. Thus, frequent changes in the structure of communication may delay or impair CV deployment. Additionally, there currently exists no standardization across manufacturers, meaning that the type and extent of data sharing may not be uniform. As such, these challenges could jeopardize market penetration of CVs. This needs to be addressed in future research. Also, researchers have sounded caution about possible pitfalls of the CV-AV synergy, in the area of occupant security. According to Anderson et al. (2016), connectivity capabilities, particularly, internet connected systems, may open the doorway for an AV to be hacked, and that without connectivity, such vulnerability may not exist or be minimal. This is currently the subject of research at various laboratories dedicated to CAV security.
Future trends regarding market adoption of these two technologies, and their relative pace of advancement or regulation, will shape the shape of future synergies between them. To realize the full benefits of the synergies between them, it will be needed to promote connectivity installation in HDVs, because increased market penetration of CV may foster AV adoption. There is increasing research on CAV market adoption; however, relatively few researchers have investigated the impact of connectivity on CV adoption. At the current time, CVs are closer to market entry compared to AVs, therefore, issues regarding their market patterns and customer proclivities toward vehicle connectivity, need to be studied. It is also needed to investigate the relationships between ride sharing and public transportation, and the roles to be played by vehicle connectivity. Another important research direction is to address the rich, disaggregate data collected by CVs. Human drivers are unable to quickly process the large amounts of data prior to making microscopic driving decisions; therefore, the information must be presented to the drivers in a form that they can easily and quickly process. Some research is being conducted in this domain, and there should be continued efforts to increase the effectiveness of message delivery to drivers of connected HDVs.
This paper makes it clear that connectivity has a stronger influence on the realization of AV benefits, while automation has only a limited influence on the realization of the benefits from connectivity. As such, research and investments in connectivity are expected to be impactful not only for CVs but also to AVs. Based on the evaluation of benefits and challenges of vehicular connectivity, conducive policy and increased research efforts are needed to speed up the deployment of CAVs and to realize their full benefits from a strategic, tactical and operational perspective. In other words, the benefits and synergies of AVs and CVs can be fully realized only when future policy and legislative frameworks consider key public concerns regarding the adoption of these technologies. The most fundamental issue that must be addressed is the need for a ubiquitous, standardized platform for communication. It is desired that communication protocols should be uniform across technology and vehicle manufacturers, transportation agencies, and the physical or cyber infrastructure. This can be facilitated through federal regulation, guidelines and policy statements. In addition, possible research areas include the prospective game-changing role of 5G, relative merits of alternative communication technologies (for vehicle connectivity) and their respective synergies with vehicle automation, protocols for (and impacts of) temporary control requests of CVs and cooperative task performance measurement, perception of trust in automation and connectivity individually or combined, and technology adoption forecasting trends regarding automation and connectivity and the effect of any time lags between the two.
Further, the interactions between CVs and AVs needs to be studied more extensively, particularly, the exact nature of the holistic and synergistic relationship between these two technologies. There exists a plethora of research opportunities arising from the understanding of vehicle connectivity and automation, their interdependence, interrelationship, and synergies. With regard to synergies, it has been suggested that the benefit of the sum of connectivity and automation could exceed the sum of their individual benefits. The deployments of AVs and CVs on test tracks or on in-service roads (or at least, investigations using computer microsimulation and driving simulator experiments), would provide a treasure trove of data for future research on the individual and synergistic effects of these sibling concepts. The private sector and agencies continue to work with the USDOT to address knowledge gaps in vehicle connectivity and automation. For example, the Association of Metropolitan Planning Organizations (AMPO), for example, through the AMPO Vehicle Connectivity and Automation Working Group are collaborating with the USDOT to incorporate vehicle connectivity and automation in their planning processes and leverage their benefits and are supporting pilot studies and deployment of AVs and CVs (Association of Metropolitan Planning Organizations, 2019).
More broadly, connectivity and automation may create or foster synergies beyond road transportation to surface and air transportation, such as Urban Air Mobility (UAM) systems. While air mobility technology is still in a nascent stage of development, recent studies suggest that the UAM concept is replete with opportunities, including the harnessing connectivity and automation, that could profoundly impact the transportation systems of tomorrow (Ahmed et al., 2020a; Eker et al., 2020; Straubinger et al., 2020). Finally, it must be mentioned that, while vehicle connectivity can potentially enhance and help prepare traditional transportation systems for the inevitable era of autonomous vehicles, such benefits may be realized only when appropriate legislative initiatives and policies are established to address public concerns and perceptions regarding such emerging technologies (Kim et al., 2019; Ahmed et al., 2020b).
Author Contributions
All authors: study conception and design, discussion, draft manuscript preparation, reviewed the results, and approved the final version of the manuscript.
Funding
This work was supported by Purdue University's Center for Connected and Automated Transportation (CCAT), a part of the larger CCAT consortium, a USDOT Region 5 University Transportation Center funded by the USDOT Award #69A3551747105, and supported (in kind) by the Center for Innovation in Control, Optimization and Networks (ICON) at Purdue. The contents of this paper reflect the views of the authors, who are responsible for the facts and the accuracy of the data presented herein, and do not necessarily reflect the official views or policies of the sponsoring organization.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
Ahmed, S. S., Hulme, K. F., Fountas, G., Eker, U., Benedyk, I. V., Still, S. E., et al. (2020a). The flying car—challenges and strategies toward future adoption. Front. Built Environ. 6:106. doi: 10.3389/fbuil.2020.00106
Ahmed, S. S., Sonduru Pantangi, S., Eker, U., Fountas, G., Still, S. E., and Anastasopoulos, P. C. (2020b). Analysis of safety benefits and security concerns from the use of autonomous vehicles: a grouped random parameters bivariate probit approach with heterogeneity in means. Anal. Methods Accid. Res. 28:100134. doi: 10.1016/j.amar.2020.100134
Al Alam, A., Gattami, A., and Johansson, K. H. (2010). “An experimental study on the fuel reduction potential of heavy duty vehicle platooning,” in 13th International IEEE Conference on Intelligent Transportation Systems (Funchal: IEEE), 306–311.
Amoozadeh, M., Deng, H., Chuah, C. N., Zhang, H. M., and Ghosal, D. (2015). Platoon management with cooperative adaptive cruise control enabled by VANET. Veh. Commun. 2, 110–123. doi: 10.1016/j.vehcom.2015.03.004
Anderson, J. M., Kalra, N., Stanley, K. D., Sorensen, P., Samaras, C., and Oluwatola, T. A. (2016). Autonomous Vehicle Technology A Guide for Policymakers. Santa Monica, CA: RAND Corporation.
Association of Metropolitan Planning Organizations (2019). National Framework for Regional Vehicle Connectivity and [WWW Document]. Available online at: https://www.ampo.org/wp-content/uploads/2019/04/2019-AMPO-Framework-11.pdf
Auld, J., Karbowski, D., and Sokolov, V. (2017). Assessing the regional energy impact of connected vehicle deployment. Transp. Res. Proc 34, 10–22. doi: 10.1016/J.APENERGY.2019.113597
Bergenhem, C., Hedin, E., and Skarin, D. (2012). Vehicle-to-vehicle communication for a platooning system. Proc. Soc. Behav. Sci. 48, 1222–1233. doi: 10.1016/j.sbspro.2012.06.1098
Chalk, S. G., Patil, P. G., and Venkateswaran, S. R. (1996). The new generation of vehicles: market opportunities for fuel cells. J. Power Sources 61, 7–13. doi: 10.1016/S0378-7753(96)02332-4
Chang, J., Hatcher, G., Hicks, D., Schneederger, J., Staples, B., Sundarajan, S., et al. (2015). Estimated Benefits of Connected Vehicle Applications: Dynamic Mobility Applications, AERIS, V2I Safety, and Road Weather Management Applications (No. FHWA-JPO-15-255). United States. Department of Transportation. Intelligent Transportation Systems Joint Program Office.
Chen, S. (2019). Safety implications of roadway design and management: new evidence and insights in the traditional and emerging (autonomous vehicle) operating environments [Ph.D. dissertation], Purdue University, West Lafayette, IN, United States.
Chen, S., Leng, Y., and Labi, S. (2020). A deep learning algorithm for simulating autonomous driving considering prior knowledge and temporal information. Comp. Aided Civil Infrastruct. Eng. 35, 305–321. doi: 10.1111/mice.12495
Clewlow, R. R., and Mishra, G. S. (2017). Disruptive Transportation: The Adoption, Utilization, and Impacts of Ride-Hailing in the United States. Institute of Transportation Studies, University of California, Davis, CA.
Czarnecki, K. (2017). Operational World Model Ontology for Automated Driving Systems. Parts I and II. Waterloo Intelligent Systems Engineering Laboratory (WISELab), Waterloo Autonomous Vehicles Laboratory (WAVELab), University of Waterloo, Waterloo, ON.
Dagan, E., Mano, O., Stein, G. P., and Shashua, A. (2004). “Forward collision warning with a single camera,” in IEEE Intelligent Vehicles Symposium, 2004 (Parma: IEEE), 37–42.
De Souza, A. M., Yokoyama, R. S., Maia, G., Loureiro, A., and Villas, L. (2016). “Real-time path planning to prevent traffic jam through an intelligent transportation system,” in Proceedings - IEEE Symposium on Computers and Communications (ISCC) (Messina: IEEE), 726–731.
Dong, J., Chen, S., Ha, P., Du, R., Li, Y., and Labi, S. (2020c). A DRL-based multiagent cooperative control framework for CAV networks: a graphic convolution Q network. arXiv [preprint]. arXiv:2010.05437. Available online at: https://arxiv.org/abs/2010.05437
Dong, J., Chen, S., Li, Y., Du, R., Steinfeld, A., and Labi, S. (2020a). “Spatio-weighted information fusion and DRL-based control for connected autonomous vehicles,” in IEEE ITS Conference, September 20–23, 2020 (Rhodes).
Dong, J., Chen, S., Li, Y., Du, R., Steinfeld, A., and Labi, S. (2020b). Facilitating connected autonomous vehicle operations using space-weighted information fusion and deep reinforcement learning based control. arXiv preprint arXiv:2009.14665.
Dowling, R., Nevers, B., Jia, A., Skabardonis, A., Krause, C., and Vasudevan, M. (2016). Performance benefits of connected vehicles for implementing speed harmonization. Transport. Res. Proc. 15, 459–470. doi: 10.1016/j.trpro.2016.06.039
Du, R., Chen, S., Li, Y., Dong, J., Ha, P., and Labi, S. (2020). A cooperative control framework for CAV lane change in a mixed traffic environment. arXiv [preprint]. arXiv:2010.05439. Available online at: https://arxiv.org/abs/2010.05439
Duell, M., Levin, M. W., Boyles, S. D., and Waller, S. T. (2016). Impact of autonomous vehicles on traffic management. Transp. Res. Rec. J. 2567, 87–94. doi: 10.3141/2567-10
Eker, U., Fountas, G., and Anastasopoulos, P. C. (2020). An exploratory empirical analysis of willingness to pay for and use flying cars. Aerosp. Sci. Technol. 104:105993. doi: 10.1016/j.ast.2020.105993
Fagnant, D. J., and Kockelman, K. M. (2014). The travel and environmental implications of shared autonomous vehicles, using agent-based model scenarios. Transp. Res. Part C Emerg. Technol. 40, 1–13. doi: 10.1016/j.trc.2013.12.001
Fagnant, D. J., and Kockelman, K. M. (2018). Dynamic ride-sharing and fleet sizing for a system of shared autonomous vehicles in Austin, Texas. Transportation 45, 143–158. doi: 10.1007/s11116-016-9729-z
Feng, Y., Head, K. L., Khoshmagham, S., and Zamanipour, M. (2015). A real-time adaptive signal control in a connected vehicle environment. Transp. Res. Part C Emerg. Technol. 55, 460–473. doi: 10.1016/j.trc.2015.01.007
Filipovska, M., Mahmassani, H. S., and Mittal, A. (2019). Prediction and mitigation of flow breakdown occurrence for weather affected networks: case study of Chicago, Illinois. Transport. Res. Rec. 2673, 628–639. doi: 10.1177/0361198119851730
Ghiasi, A., Ma, J., Zhou, F., and Li, X. (2017). “Speed harmonization algorithm using connected autonomous vehicles,” in 96th Annual Meeting of the Transportation Research Board (No. 17–02568) (Washington, DC).
Goodall, N., Smith, B., and Park, B. (2013). Traffic signal control with connected vehicles. Transp. Res. Rec. 2381, 65–72. doi: 10.3141/2381-08
Guériau, M., Billot, R., El Faouzi, N. E., Monteil, J., Armetta, F., and Hassas, S. (2016). How to assess the benefits of connected vehicles? A simulation framework for the design of cooperative traffic management strategies. Transport. Res. Part C Emerg. Technol. 67, 266–279. doi: 10.1016/j.trc.2016.01.020
Ha, P., Chen, S., Du, R., Dong, J., Li, Y., and Labi, S. (2020). Leveraging the capabilities of connected and autonomous vehicles and multi-agent reinforcement learning to mitigate highway bottleneck congestion. arXiv [preprint]. arXiv:2010.05436. Available online at: https://arxiv.org/abs/2010.05436
Hill, C. J., and Garrett, K. (2011). AASHTO connected vehicle infrastructure deployment analysis. Intell. Transp. Syst. Jt. Progr. Off. 1–104. Available online at: http://enterprise.prog.org/Projects/2010_Present/developingconsistencyIWS/AASHTOConnectedVehicleDeployAnalysis_finalreport.pdf
Hobert, L., Festag, A., Llatser, I., Altomare, L., Visintainer, F., and Kovacs, A. (2015). Enhancements of V2X communication in support of cooperative autonomous driving. IEEE Commun. Mag. 53, 64–70. doi: 10.1109/MCOM.2015.7355568
Hu, J., Kong, L., Shu, W., and Wu, M. Y. (2012). “Scheduling of connected autonomous vehicles on highway lanes,” in GLOBECOM - IEEE Global Telecommunications Conference (Anaheim, CA: IEEE), 5556–5561.
Huegle, M., Kalweit, G., Mirchevska, B., Werling, M., and Boedecker, J. (2019). Dynamic input for deep reinforcement learning in autonomous driving. arXiv [preprint]. arXiv: 1907.10994. doi: 10.1109/IROS40897.2019.8968560
Hyland, M., and Mahmassani, H. S. (2018). Dynamic autonomous vehicle fleet operations: optimization-based strategies to assign AVs to immediate traveler demand requests. Transp. Res. Part C Emerg. Technol. 92, 278–297. doi: 10.1016/j.trc.2018.05.003
Ilgin Guler, S., Menendez, M., and Meier, L. (2014). Using connected vehicle technology to improve the efficiency of intersections. Transp. Res. Part C Emerg. Technol. 46, 121–131. doi: 10.1016/j.trc.2014.05.008
Kamali, M., Dennis, L. A., McAree, O., Fisher, M., and Veres, S. M. (2017). Formal verification of autonomous vehicle platooning. Sci. Comput. Prog. 148, 88–106. doi: 10.1016/j.scico.2017.05.006
Khondaker, B., and Kattan, L. (2015). Variable speed limit: a microscopic analysis in a connected vehicle environment. Transp. Res. Part C Emerg. Technol. 58, 146–159. doi: 10.1016/j.trc.2015.07.014
Kim, M. K., Park, J. H., Oh, J., Lee, W. S., and Chung, D. (2019). Identifying and prioritizing the benefits and concerns of connected and autonomous vehicles: a comparison of individual and expert perceptions. Res. Transp. Bus. Manag. 32:100438. doi: 10.1016/j.rtbm.2020.100438
Koopman, P., and Fratrik, F. (2019). “How many operational design domains, objects, and events? Safe AI 2019,” in AAAI Workshop on Artificial Intelligence Safety (Honolulu, HI).
Kreidieh, A. R., Wu, C., and Bayen, A. M. (2018). “Dissipating stop-and-go waves in closed and open networks via deep reinforcement learning,” in IEEE Conference on Intelligent Transportation Systems, Proceedings, ITSC (Maui, HI: IEEE), 1475–1480.
Li, Y., Chen, S., Dong, J., Steinfeld, A., and Labi, S. (2020a). Leveraging vehicle connectivity and autonomy to stabilize flow in mixed traffic conditions: accounting for human-driven vehicle driver behavioral heterogeneity and perception-reaction time delay. arXiv [preprint]. arXiv:2008.04351. Available online at: https://arxiv.org/abs/2008.04351
Li, Y., Chen, S., Du, R., Ha, P., Dong, J., and Labi, S. (2020b). Using empirical trajectory data to design connected autonomous vehicle controllers for traffic stabilization. arXiv [preprint]. arXiv:2010.05440. Available online at: https://arxiv.org/abs/2010.05440
Liang, X. J., Guler, S. I., and Gayah, V. V. (2020). A heuristic method to optimize generic signal phasing and timing plans at signalized intersections using connected vehicle technology. Transp. Res. Part C Emerg. Technol. 111, 156–170. doi: 10.1016/j.trc.2019.11.008
Liang, X., Correia, G. H., and van Arem, B. (2017). An optimization model for vehicle routing of automated taxi trips with dynamic travel times. Transport. Res. Proc. 27, 736–743. doi: 10.1016/j.trpro.2017.12.045
Lin, P., Liu, J., Jin, P. J., and Ran, B. (2017). Autonomous vehicle-intersection coordination method in a connected vehicle environment. IEEE Intell. Transp. Syst. Mag. 9, 37–47. doi: 10.1109/MITS.2017.2743167
Litman, T. (2014). Autonomous vehicle implementation predictions: implications for transport planning. Transp. Res. Board Annu. Meet. 4, 237–285. Available online at: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.640.2382&rep=rep1&type=pdf
Lu, N., Cheng, N., Zhang, N., Shen, X., and Mark, J. W. (2014). Connected vehicles: solutions and challenges. IEEE Internet Things J. 1, 289–299. doi: 10.1109/JIOT.2014.2327587
Lu, X.-Y., Shladover, S. E., Jawad, I., Jagannathan, R., and Phillips, T. (2015). Novel algorithm for variable speed limits and advisories for a freeway corridor with multiple bottlenecks. Transp. Res. Rec. 2489, 86–96. doi: 10.3141/2489-10
Ma, J., Li, X., Shladover, S., Rakha, H. A., Lu, X.-Y., Jagannathan, R., et al. (2016). Freeway Speed Harmonization. IEEE Trans. Intell. Veh. 1, 78–89. doi: 10.1109/TIV.2016.2551540
Ma, J., Zhou, F., and Demetsky, M. J. (2012). “Evaluating mobility and sustainability benefits of cooperative adaptive cruise control using agent-based modeling approach,” in 2012 IEEE Systems and Information Engineering Design Symposium, SIEDS (Charlottesville, VA: IEEE), 74–78.
Macfarlane, J. (2019). Your Navigation App Is Making Traffic Unmanageable [WWW Document]. IEEE Spectrum. Available online at: https://spectrum.ieee.org/computing/hardware/your-navigation-app-is-making-traffic-unmanageable
Mahmassani, H. S. (2016). 50th Anniversary invited article autonomous vehicles and connected vehicle systems: flow and operations considerations. Transp. Sci. 50, 1140–1162. doi: 10.1287/trsc.2016.0712
Maiti, S., Winter, S., and Kulik, L. (2017). A conceptualization of vehicle platoons and platoon operations. Transp. Res. Part C Emerg. Technol. 80, 1–19. doi: 10.1016/j.trc.2017.04.005
Malikopoulos, A. A., Hong, S., Park, B. B., Lee, J., and Ryu, S. (2019). Optimal control for speed harmonization of automated vehicles. IEEE Trans. Intell. Transp. Syst. 20, 2405–2417. doi: 10.1109/TITS.2018.2865561
Menon, N., Barbour, N., Zhang, Y., Pinjari, A. R., and Mannering, F. (2019). Shared autonomous vehicles and their potential impacts on household vehicle ownership: an exploratory empirical assessment. Int. J. Sustain. Transp. 13, 111–222. doi: 10.1080/15568318.2018.1443178
Michel, P., Karbowski, D., and Rousseau, A. (2016). Impact of connectivity and automation on vehicle energy use (No. 2016-01-0152). SAE Technical Papers.
Mohd Zulkefli, M. A., Mukherjee, P., Sun, Z., Zheng, J., Liu, H. X., and Huang, P. (2017). Hardware-in-the-loop testbed for evaluating connected vehicle applications. Transp. Res. Part C Emerg. Technol. 78, 50–62. doi: 10.1016/j.trc.2017.02.019
Myr, D. (2002). Real Time Vehicle Guidance and Forecasting System Under Traffic Jam Conditions. Patent No.: US 6,480,783 B1. Washington, DC: US Patent Office.
NHTSA (2016). Federal Automated Vehicles Policy: Accelerating the Next Revolution in Roadway Safety. U.S. Department of Transportation.
Nie, J., Zhang, J., Ding, W., Wan, X., Chen, X., and Ran, B. (2016). Decentralized cooperative lane-changing decision-making for connected autonomous vehicles*. IEEE Access. 4, 9413–9420. doi: 10.1109/ACCESS.2017.2649567
Papadoulis, A., Quddus, M., and Imprialou, M. (2019). Evaluating the safety impact of connected and autonomous vehicles on motorways. Accident Anal. Prev. 124, 12–22. doi: 10.1016/j.aap.2018.12.019
Payalan, Y. F., and Guvensan, M. A. (2019). Towards next-generation vehicles featuring the vehicle intelligence. IEEE Transac. Intellig. Transport. Syst. 21, 30–47. doi: 10.1109/TITS.2019.2917866
Rahman, M. S., Abdel-Aty, M., Lee, J., and Rahman, M. H. (2019). Safety benefits of arterials' crash risk under connected and automated vehicles. Transport. Res. Part C Emerg. Technol. 100, 354–371. doi: 10.1016/j.trc.2019.01.029
Ramezani, H., and Benekohal, R. (2015). “Optimized speed harmonization with connected vehicles for work zones,” in IEEE Conference on Intelligent Transportation Systems, Proceedings, ITSC (Las Palmas: IEEE), 1081–1086.
Ruiz, D. (2020). Connectivity is the key to early wins in connected and automated mobility. Connect. Autom. Mobility. Available online at: https://www.smarttransport.org.uk/features/connectivity-is-the-key-to-early-wins-in-connected-and-automated-mobility
Sengupta, R., Rezaei, S., Shladover, S. E., Cody, D., Dickey, S., and Krishnan, H. (2007). Cooperative collision warning systems: concept definition and experimental implementation. J. Intell. Transp. Syst. Technol. Plan. Oper. 11, 143–155. doi: 10.1080/15472450701410452
Shladover, S. E., Su, D., and Lu, X. Y. (2012). Impacts of cooperative adaptive cruise control on freeway traffic flow. Transp. Res. Rec. 2324, 63–70. doi: 10.3141/2324-08
Silberg, G., Wallace, R., Matuszak, G., Plessers, J., Brower, C., and Subramanian, D. (2012). Self-Driving Cars: The Next Revolution. White paper. KPMG LLP and Center of Automotive Research, 132–146.
Sou, S., and Tonguz, O. K. (2011). Enhancing VANET connectivity through roadside units on highways. IEEE Transac. Vehic. Technol. 60, 3586–3602. doi: 10.1109/TVT.2011.2165739
Stern, R. E., Cui, S., Delle Monache, M. L., Bhadani, R., Bunting, M., Churchill, M., et al. (2018). Dissipation of stop-and-go waves via control of autonomous vehicles: field experiments. Transp. Res. Part C Emerg. Technol. 89, 205–221. doi: 10.1016/j.trc.2018.02.005
Straubinger, A., Rothfeld, R., Shamiyeh, M., Büchter, K. D., Kaiser, J., and Plötner, K. O. (2020). An overview of current research and developments in urban air mobility – setting the scene for UAM introduction. J. Air Transp. Manag. 87:101852. doi: 10.1016/j.jairtraman.2020.101852
Tajalli, M., and Hajbabaie, A. (2018). Dynamic speed harmonization in connected urban street networks. Comput. Civ. Infrastruct. Eng. 33, 510–523. doi: 10.1111/mice.12360
Talebpour, A., and Mahmassani, H. S. (2016). Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C Emerg. Technol. 71, 143–163. doi: 10.1016/j.trc.2016.07.007
Tientrakool, P., Ho, Y. C., and Maxemchuk, N. F. (2011). “Highway capacity benefits from using vehicle-to-vehicle communication and sensors for collision avoidance,” in IEEE Vehicular Technology Conference (IEEE), 1–5.
Trager, W., Ahmadjian, V., and Paracer, S. (1988). Symbiosis: an introduction to biological associations. J. Parasitol. 6, 149–167. doi: 10.2307/3282073
Uhlemann, E. (2015). Introducing connected vehicles [Connected vehicles]. IEEE Veh. Technol. Mag. 10, 23–31. doi: 10.1109/MVT.2015.2390920
USDOT (2016). Planning for Connected Automated Vehicles in Smart Cities. Fort Worth, TX. Available online at: https://www.its.dot.gov/presentations/egan_smith/FutureTransportationCV-AV.pdf
USDOT (2019). Preparing for the Future of Transportation: Automated Vehicles 3.0. Available online at: https://www.transportation.gov/sites/dot.gov/files/docs/policy-initiatives/automated-vehicles/320711/preparing-future-transportation-automated-vehicle-30.pdf
Vahidi, A., and Sciarretta, A. (2018). Energy saving potentials of connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 95, 822–843. doi: 10.1016/j.trc.2018.09.001
Van Arem, B., Van Driel, C. J. G., and Visser, R. (2006). The impact of cooperative adaptive cruise control on traffic-flow characteristics. IEEE Trans. Intell. Transp. Syst. 7, 429–436. doi: 10.1109/TITS.2006.884615
Vinitsky, E., Parvate, K., Kreidieh, A., Wu, C., and Bayen, A. (2018). “Lagrangian control through deep-RL: applications to bottleneck decongestion,” in IEEE Conference on Intelligent Transportation Systems, Proceedings, ITSC (IEEE), 758–765.
Wang, J., Wang, C., Lv, J., Zhang, Z., and Li, C. (2017). Modeling travel time reliability of road network considering connected vehicle guidance characteristics indexes. J. Adv. Transp. 2017:2415312. doi: 10.1155/2017/2415312
Xia, F., Yang, L. T., Wang, L., and Vinel, A. (2012). Internet of things. Int. J. Commun. Syst. 25:1101. doi: 10.1002/dac.2417
Yang, H., and Oguchi, K. (2018). “Connected vehicle enhanced vehicle routing with intersection turning cost estimation,” in 2018 21st International Conference on Intelligent Transportation Systems (ITSC) (IEEE), 537–542.
Yang, H., Wang, Z., and Xie, K. (2017). Impact of connected vehicles on mitigating secondary crash risk. Int. J. Transport. Sci. Technol. 6, 196–207. doi: 10.1016/j.ijtst.2017.07.007
Yue, L., Abdel-Aty, M., Wu, Y., and Wang, L. (2018). Assessment of the safety benefits of vehicles' advanced driver assistance, connectivity and low level automation systems. Accid. Anal. Prev. 117, 55–64. doi: 10.1016/j.aap.2018.04.002
Zheng, J., and Liu, H. X. (2017). Estimating traffic volumes for signalized intersections using connected vehicle data. Transp. Res. Part C Emerg. Technol. 79, 347–362. doi: 10.1016/j.trc.2017.03.007
Keywords: autonomous driving, transportation, connectivity, automation, connected and autonomous vehicle (CAV)
Citation: Ha P, Chen S, Du R, Dong J, Li Y and Labi S (2020) Vehicle Connectivity and Automation: A Sibling Relationship. Front. Built Environ. 6:590036. doi: 10.3389/fbuil.2020.590036
Received: 31 July 2020; Accepted: 26 October 2020;
Published: 26 November 2020.
Edited by:
Ampol Karoonsoontawong, King Mongkut's University of Technology Thonburi, ThailandReviewed by:
Ahmed F. Al-Kaisy, Montana State University, United StatesGrigorios Fountas, Edinburgh Napier University, United Kingdom
Copyright © 2020 Ha, Chen, Du, Dong, Li and Labi. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Sikai Chen, Y2hlbjE2NzBAcHVyZHVlLmVkdQ==; c2lrYWljaGVuQGNtdS5lZHU=
†ORCID: Paul Ha orcid.org/0000-0002-8511-8010
Sikai Chen orcid.org/0000-0002-5931-5619
Runjia Du orcid.org/0000-0001-8403-4715
Jiqian Dong orcid.org/0000-0002-2924-5728
Yujie Li orcid.org/0000-0002-0656-4603
Samuel Labi orcid.org/0000-0001-9830-2071