 E. M. Arntz1
E. M. Arntz1 J. H. R. Van Duin
J. H. R. Van Duin L. A. Tavasszy
L. A. Tavasszy- 1Jelmer, Breukelen, Netherlands
- 2Faculty Technology, Policy and Management, Delft University of Technology, Delft, Netherlands
- 3HRTech, Rotterdam University of Applied Sciences, Rotterdam, Netherlands
- 4Faculty Civil Engineering, Delft University of Technology, Delft, Netherlands
- 5The Future Mobility Network, Delft, Netherlands
Introduction: Autonomous delivery robots are a promising alternative for last-mile delivery. To realise successful implementation of delivery robots in public spaces, it is important to study the interaction between robots and the traffic environment. The traffic environment includes the physical infrastructure and the objects using it like cars and people.
Methods: This research proposes an assessment method to determine the readiness of a traffic environment for autonomous delivery robots. A conceptual model is proposed that includes the factors that determine this so-called “roboreadiness”. The two key components of the model are the performance of the robot in the traffic environment and its social acceptance. A real-life experimental test case, expert interviews, and a survey are used to refine and validate the framework.
Results: The real-life test case showed for the basic variant a sufficient level both on performance and social acceptance. All other variants such as pillars, road narrowing, and bends did not lead to sufficient performance or social acceptance levels.
Discussion: The main outcome of this research is an assessment framework which allows to quantitatively assess traffic performance and social acceptance of sidewalk automated delivery robots. Suggestions for future work include further detailing and elaboration of the approach, scaling up experiments, and researching the possible influence of social acceptance on traffic performance.
1 Introduction
Last-mile delivery is facing multiple challenges, requiring technological innovations to keep up with the high demand and service requirements (Boysen et al., 2020). The parcel delivery sector relies strongly upon labour which is the most scarce and expensive factor in the execution of the delivery processes. Companies search for alternative ways of allowing processes to take place without human intervention. Currently, last-mile logistics are the least efficient step within supply chains and could benefit from automation (Ranieri et al., 2018). Automated goods delivery is expected to cover 80% of all business-to-customer deliveries in the future (Joerss et al., 2016). Current literature on the topic of delivery robots shows that automation in last-mile logistics could lead to cost and (delivery) time reduction and can provide a sustainable way of delivering goods (Figliozzi and Jennings, 2020; Chen et al., 2021; Lemardelé et al., 2021). However, there is a need for more research on the integration of delivery robots in the public space (Li et al., 2021). The delivery robot uses many of the same features as an autonomous car: 10 cameras for 360-degree vision, several ultrasonic sensors, GPS navigation, measurement units, gyroscopes, and much more. According to the suppliers of this technology, these robots have the functionalities to perform the deliveries. Before a large-scale roll-out of delivery robots can be realised, it is important to know whether implementation could be successful in the environment. In this research, the traffic environment includes the physical infrastructure, traffic conditions, and the people using the environment, who have to deal with the delivery robot. This research assumes that robot behaviour and human behaviour are dependent on the traffic environment. The behaviour of the delivery robot leads to a certain performance in public space, which leads to a certain level of social acceptance. To be able to study the interaction between the three elements (delivery robot, human, public space), knowledge is required on the impact factors of the public space on the performance of new transport concepts, and on the impact factors of the public space on the acceptance of technology innovations.
This paper proposes an assessment methodology that can be applied to determine whether the environment is ready for delivery robots to drive there - further in the paper referred to as roboreadiness. As the robot has to deal with both robot-environment and human-robot interaction, the success of its implementation depends on the ability of the robot to function in the traffic environment as well as on its social acceptance. The research approach that is used to acquire this knowledge and to develop the assessment method, is presented in Figure 1.
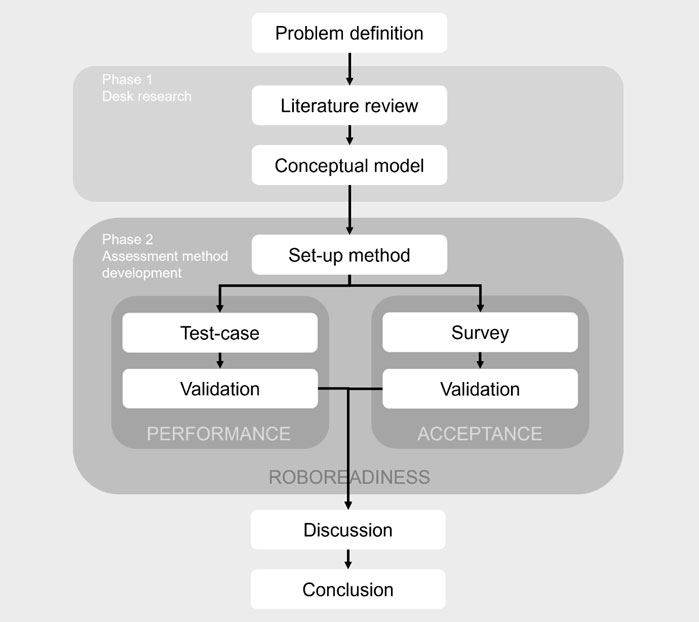
FIGURE 1. Research Approach to develop the Roboreadiness assessment method.
The focus of this research is mainly on three elements: the traffic environment, the performance of the robot and the social acceptance. These topics were explored and examined in two phases. The first phase included desk research, in which a literature review was performed. This method was used to create a conceptual model, presenting the relations between the elements and showing the influencing factors. The second phase was the development of the assessment method. The conceptual model serves as a foundation for the method, with which the level of roboreadiness of a traffic environment can be determined. Roboreadiness is expressed in terms of the performance of the robot and social acceptance. The development of the assessment method was divided into three stages. First, the setup of the method was defined. Second, the assessment method itself was designed and thirdly the method was validated. The assessment method consists of two parts. To assess the performance of the delivery robot in its traffic environment, a series of tests is proposed. Secondly, to determine the level of social acceptance in relation to the traffic environment, a survey is constructed. A case study is used to validate the theory-based method in practice, and to obtain first empirical insights into the influence of the traffic environment on performance and social acceptance. The findings and discussion lead to a conclusion on the main research question how to determine the roboreadiness of a traffic environment.
The remainder of the paper is structured as follows: Section 2 contains a literature review leading toward a conceptual model, defining the key elements for the integration of delivery robots in the public space. Section 3 describes the assessment method development including a demonstration of the methodology using a real-life experiment with a sidewalk automated delivery robot. Section 4 provides a discussion of the method, including a reflection on implications and research limitations. Section 5 presents the main findings and outlines recommendations for future research.
2 Conceptual model of factors influencing roboreadiness
In order to successfully implement delivery robots in public spaces, it is important that the delivery robot interacts in an effective and efficient way with the environment. In this environment, the robot encounters multiple aspects: the physical infrastructure, traffic conditions and people. Since the physical characteristics of the infrastructure are often a given, the delivery robot has to adapt to the present circumstances. It is essential that the traffic environment and the people are ready to deal with the delivery robot when it is implemented (Oztemel et al., 2009). In addition, to implement a robot successfully in a certain area it is necessary to know the relation between the traffic environment and the performance of the robot, as well as the social acceptance. The latest two factors are part of the literature review to identify the conceptual factors.
2.1 Performance of new transport concepts
The performance of new technology is an essential indicator of the level of success and can have many dimensions (Tian et al., 2018). The challenges of today arise in adapting cities to their current and future needs (Paiva et al., 2021). Ideally, transport innovations should be functional within the existing environment. In addition, when areas change or if they are newly built, the environment can be suitably adapted to the innovation. When integrating new transport concepts into the traffic environment, it is important to study the interaction between the innovation and its surroundings before realising the implementation. Tomitsch and Hoggenmueller (2021) state that it is a challenge to design or implement automated systems in public spaces because it can be dependent on the physical context, the people involved, and their norms. Fisher (2022) introduced a set of principles that provide guidance for designing automated applications in urban areas. These principles include the integrity and quality of the urban realm, enclosure and continuity, ease of movement, accessibility, diversity, legibility, and adaptability. The flow of people must not be adversely affected (Tomitsch and Hoggenmueller, 2021). With the implementation of delivery robots in public spaces, it is essential that these issues are not violated. Performance factors related to these issues are continuity, deviation and pace. Not much has been examined yet about the interaction between a delivery robot and its environment. Oztemel et al. (2009) defined five criteria to measure the performance of swarm robots, related to feasibility, manageability, usefulness, acceptability, and necessity. These aspects can be applied to the context of delivery robots within the traffic environment. Feasibility implies that the risks and technology the robot brings, are feasible. Speaking about the performance of the delivery robot, this means the robot must operate safely. The other aspect, manageability, entails functions of the robot that can easily be performed without violating operational rules. For delivery robots, this can be interpreted as not violating traffic rules, which gives the factor compliance.
This research focuses on the factors that determine the performance of the delivery robot in relation to its traffic environment. Therefore, the influencing factors are limited to the part when the robot is driving, it does not take into account the performance related to the delivery service (e.g., pick-up/drop-off). The factors that determine this performance are obtained from the articles listed and transformed to indicators that can be measured (see Table 1).
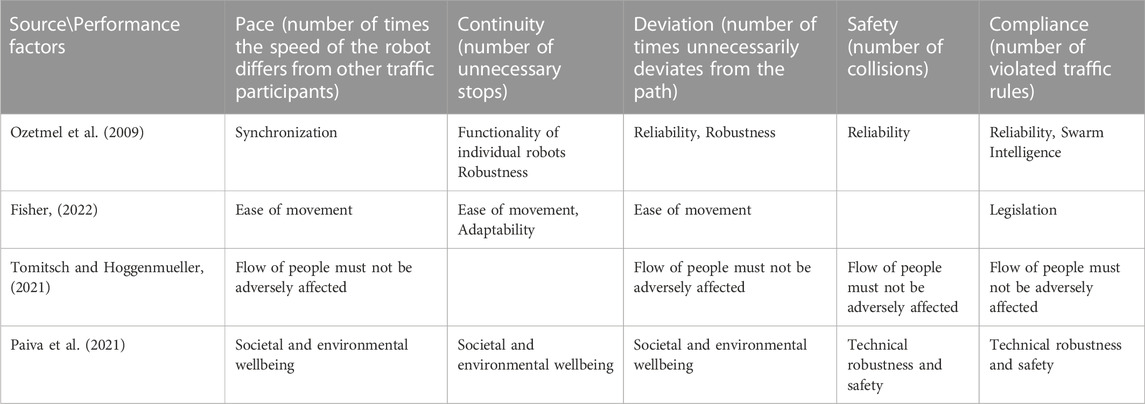
TABLE 1. Measurable performance factors derived from the literature review.
2.2 Social acceptance of technology innovation
Acceptance is an important aspect for technological innovations implemented in public space. Even if the innovation can improve efficiency and is more sustainable than the alternative, it will only be a success if people interact with and accept it (Devine-Wright, 2007). In order to be accepted, the innovation has to meet basic usability requirements and be recognised as useful (Dillon, 2001). Acceptance is a broad term and does not have one single definition. It can also be different for users and non-users of the innovation. This research focuses on innovation within the traffic environment. Therefore, social acceptance is studied, which expresses the acceptance by people who interact with the innovation on the streets. This includes non-users, like pedestrians or other road users who do not necessarily choose to use or interact with the delivery robot, but are involuntarily exposed to the innovation and have to coexist with it.
Current technology acceptance models focus mainly on the acceptance of the user of the technology. The original and widely used Technology Acceptance Model (TAM) of Davis (1989) presents two factors that, according to him, determine acceptance: perceived ease of use and perceived usefulness. These factors have a positive correlation with the intention to use the technology. This is a usage-related acceptance model. The factors are influenced by aspects like subjective norms, relevance, and attitude toward technology. Many researchers have built upon TAM, in different areas of research. Another well-known acceptance model is the Unified Theory of Acceptance and Use of Technology (UTAUT), by Venkatesh et al. (2003). Here, the two factors from TAM are translated to performance expectancy and effort expectancy. In addition, social influence is added to this model. These two models, TAM and UTAUT, are general and can be applied to all sorts of technologies. More specific models, to narrow down to the context of automated systems, are the Automation Acceptance Model (AAM) and the Car Technology Acceptance Model (CTAM). These are created as an expansion of the original models and include factors like trust, safety, and anxiety (Ghazizadeh et al., 2012; Osswald et al., 2012). In robotics research, acceptance models exist as well and focus on aspects such as the appearance and social ability of the robot. One example is the so-called Autonomous Delivery Vehicle Acceptance Model (ADV-AM), which includes the constructs that predict the behavioural intention to use delivery robots. This model was created by Kapser and Abdelrahman (2020), who investigated the acceptance by users of delivery robots in Germany, adapting an extended UTAUT model to the context of last-mile delivery robots.
Acceptance by non-users is also important for ensuring a smooth coexistence on sidewalks. Abrams et al. (2021) explain that many usage-related factors like intentional and social interaction, appearance and form, usage, and autonomy are not necessarily relevant for non-users. They introduced the term Existence Acceptance (EA) where the focus is on the passive approval of the presence of the delivery robot. Factors include the level of competence, interest, discomfort, enjoyment, and the general perceived usefulness for society and subjective social norms.
Still, not many studies exist about the interaction between delivery robots and people. However, research about other automated systems provides some insights. Fraedrich and Lenz (2016) wrote about the acceptance of autonomous driving, whereby results of other studies are analysed and used as input for their own investigation of the view of road users on the technology. In their article, they present a two-level category system, whereby within a certain context, object-related as well as subject-related aspects play a role. This research on delivery robots is limited to the acceptance related to the operational part. Therefore factors like privacy or design are not taken into account. This makes that only the aspects “perceived features of the technology”, and “evaluative attitudes expectations” from the two-level category system are applicable to this case. Factors that belong to these aspects are comfort and convenience, and interest, respectively. Comfort and interest correspond with the theory of existence acceptance of Abrams et al. (2021). Another example of human-machine interaction with regard to autonomous driving, is the acceptance of semi-automated truck platooning. In a study by Castritius et al. (2020), people from Germany and California were asked to fill in an online questionnaire about their attitudes towards the technology and behavioural intention to cooperate with heavy truck platoons. Constructs that can be translated to delivery robots in the public space are the expected usefulness of the concept, the expected ease of sharing the road, and the specifications of the vehicle. Associated factors for delivery robots are general perceived usefulness, predictability, and dimensions of the robot, respectively.
Table 2 shows the literature review on the acceptance models and their key factors.

TABLE 2. Acceptance factors derived from literature review.
From the literature about technology acceptance models and human-machine interaction, various factors can be extracted that influence the acceptance of an innovation. This study focuses on the specific impact that the traffic environment can have on social acceptance. This leads to the following list of relevant factors:
• Predictability (the difference in the expected and the actual behaviour of the robot);
• Competence (functioning of the robot);
• Comfort (non-annoyance caused by the robot);
• Dimensions (size of the robot).
2.3 Conceptual model
In the previous subsections, the factors belonging to performance and acceptance are derived from a literature review. These are translated into a conceptual model showing the existing connections between public space, robots, and humans. The model is illustrated in Figure 2. The elements in the conceptual model form the basis for the assessment method.
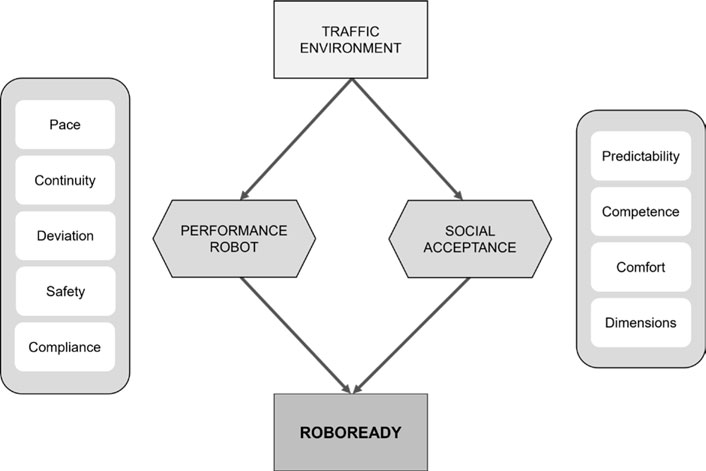
FIGURE 2. Conceptual model of the factors influencing the roboreadiness.
As shown in Figure 2 the traffic environment is given in this research and has an influence on both the performance of the robot and on the social acceptance. The performance consists of the factors pace, continuity, deviation, safety, and compliance. The social acceptance consists of the following factors: predictability, competence, comfort, and dimensions. (i.e., the factors that determine performance and social acceptance are listed next to their various elements and connected with an arrow). Finally, both dimensions together determine the state and the level of roboreadiness. When the factors have an acceptable value and therefore ensure a sufficient level of the elements, the delivery robot can be successfully integrated into the public space.
3 Assessment method and demonstration
The assessment method development consists of two stages. First, the context of the study and the requirements for executing the method are defined during the set-up stage. Second, the assessment itself is performed. Steps in the analysis include specifying the traffic environment, acquisition of data on performance and social acceptance, and processing of data to come to a conclusion.
The explanation of the method below is combined with an illustration of its application in a real-life experiment at the University campus of Erasmus University Rotterdam. The delivery robot at the campus included two routes (see Figure 3) with four main traffic situations (see Figures 4–7). As it is not possible to represent all situations in the routes, the selection of the traffic situations shows significant differences in the infrastructure and traffic conditions. All together, they represent all the different possible infrastructure and traffic situations the robot encounters on its route.

FIGURE 3. Routes of the delivery robot at EUR campus (blue: SPAR - Library: SPAR - orange Hatta).
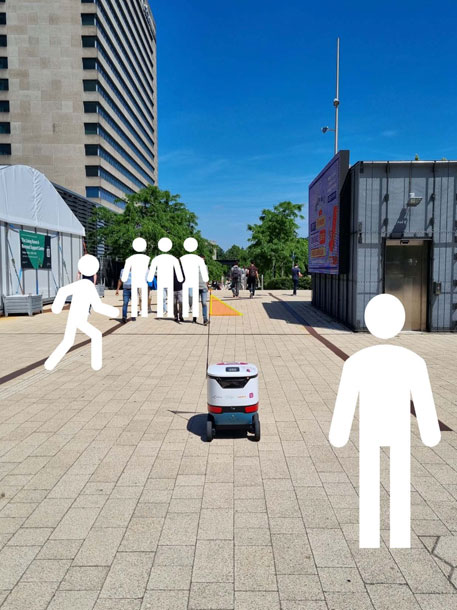
FIGURE 4. Setting 1: Basis.

FIGURE 5. Setting 2: Pillars.

FIGURE 6. Setting 3: Road Narrowing.

FIGURE 7. Setting 4: Bend.
The first route is the base setting. The road is wide (compared to the dimensions of the robot), goes straight, has no crossings, and is flat. The other road users are pedestrians, who are walking at a steady walking speed. The indicative value of the intensity is five persons in a radius of 5 m around the delivery robot. The density is low, which means there is much free space around the robot. The visibility is good, the robot can see far around. A visualisation of the base setting 1 is shown in Figure 4.
In the second setting, the delivery robot drives through a narrow lane, surrounded by pillars. This makes the robot cannot see around the corner. The road is flat and goes straight, but the robot faces a crossing when it passes the pillars. The other road users consist of pedestrians only, with an intensity of four persons in a radius of 5 m around the delivery robot, walking approximately 4 km per hour. There are many obstacles around (the pillars) so the density is high. There are many obstacles which makes that the viewing distance (and angle) of the robot is limited. Setting 2 is illustrated in Figure 5.
In the third setting, the delivery robot encounters a road narrowing and the road goes downhill. There are no crossings and the road goes straight. Again the robot only encounters pedestrians, five persons in a radius of 5 m, who are walking at a speed of around 3 km per hour. The density goes from low to high, as the road approaches a path between bushes, coming from an open square. The field of vision is good because the bushes are low. An image of setting 3 is shown Figure 6.
The fourth setting contains a bend in the road, where the delivery robot goes to the right on a crossing. Moreover, the road is wide and flat. Pedestrians are the only other road users: there are 3 persons around the delivery robot, in a radius of 5 m, walking at a steady walking speed. The density is low, there are no obstacles around and therefore the visibility is good. Setting 4 is depicted in Figure 7.
3.1 Set-up
The context of the study includes an autonomous sidewalk delivery robot in the traffic environment, which consists of two aspects: the physical infrastructure and the traffic conditions. Table 3 gives an overview of the factors of the type of traffic environment considered, divided into the two aspects. The factors are chosen based on the pilot taking place at the campus of the Erasmus University Rotterdam.
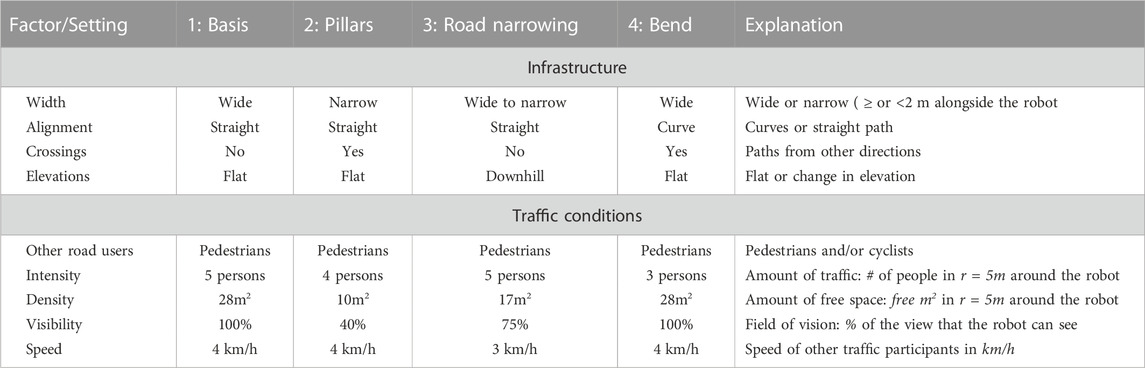
TABLE 3. Characteristics (infrastructure & traffic conditions) of the scenarios.
To start the assessment method the following assumptions and pre-conditions should be met: (Assumptions).
• The traffic environment is a given and does not change.
• There are no extreme weather conditions at the time of execution.
• The delivery robot functions properly under normal circumstances.
(Pre-conditions).
• The delivery robot has to drive autonomously and must not be manually operated.
• The traffic environment has to be an active modes traffic environment.
• There are no other factors present in the traffic environment than the ones listed in Table 3. Combinations of the factors can be included.
3.2 Assessment method
To assess the performance and the social acceptance, indicators of the factors are defined. The factors are monitored during the execution of the method and evaluated based on the value of the indicator.
Steps to measure the performance in a test case:
o Create the settings in real life case
o Create scenarios: let the robot drive through different settings, these are the specifications of the infrastructure and traffic conditions (see Table 3);
o Assess the indicators per scenario;
⁃ Count # of times pace of the robot varies from the pace of other road users, unplanned stops, unnecessary deviations from the straight path, collisions, and violations of traffic rules (see Table 4);
o Run each test case with a substantial number of iterations to reduce statistical noise (for example in our experiment tentatively set at 50 times).
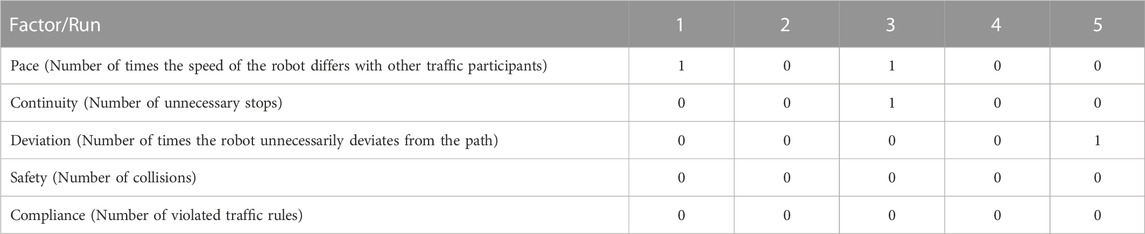
TABLE 4. Example of performance measurement setting Basis after 5 runs.
Explanation: Table 4 represents the number of observations for one run (driving the route in this case the basis scenario). In case of zero, no observations has been counted for this run. If it has a value ‘x’ or more, it means that this occurrence happened ‘x’ times during the run.
The following steps are taken to analyse the performance:
o Summarise data per scenario (descriptive statistics);
⁃ Calculate sum, mean, standard deviation and variance for all factors;
o Perform a one-sample t-test to determine whether the mean is significantly different from 0;
o Interpret the results;
o Check if the data meet minimum requirements;
⁃ Safety = 0;
⁃ Pace, continuity, deviation, compliance ≤ 25;
• Translate scores to the level of performance;
⁃ Take the sum of the values per factor;
⁃ Multiply the score of compliance by 10;
⁃ Check the level belonging to the performance score for each scenario.
The following results have been found for the four settings (see Table 5–Table 8).
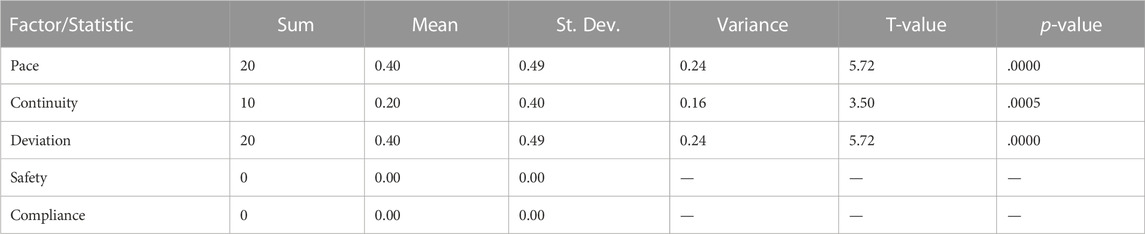
TABLE 5. Descriptive statistics of the performance factor in scenario 1: Basis.
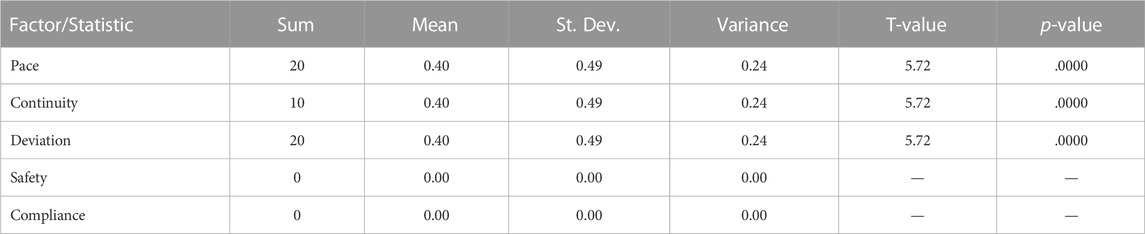
TABLE 6. Descriptive statistics of the performance factor in scenario 2: Pillars.
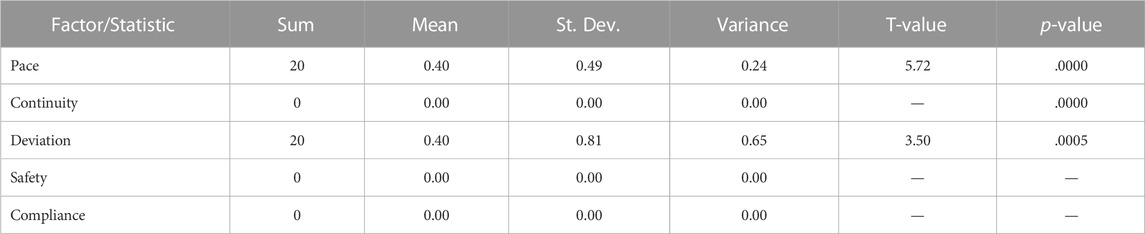
TABLE 7. Descriptive statistics of the performance factor in scenario 3: Road Narrowing.
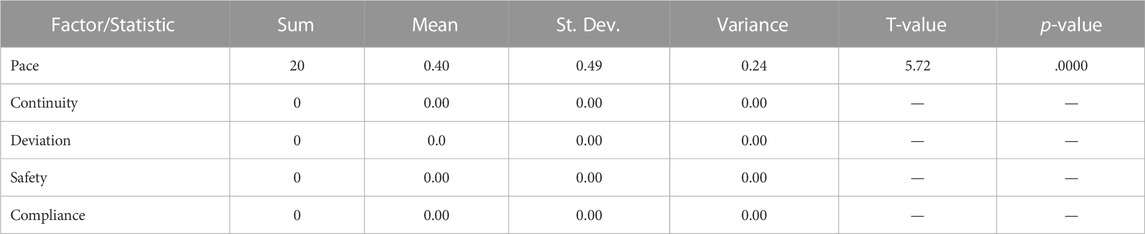
TABLE 8. Descriptive statistics of the performance factor in scenario 4: Bend.
A remarkable result is that the mean of the factor deviation in scenario 3 also has a value of 0.40, but a higher variance (0.65). The t-test served as a verification to check whether the means are really greater than 0. The p-values of all factors with a variance higher than 0, are less than .05, which means all these results are significantly different from 0.
It can also be seen that the factor compliance has a value of 0 in all iterations. The robot has not broken any traffic rules. All the sums of the factors within a scenario are summed up. This leads to the performance scores of 50 in scenario 1, 60 in scenario 2, 40 in scenario 3 and 20 in scenario 4. By applying the following judgement rules: Good (score = 0–25), Sufficient (score = 26–50), Insufficient (score = 51–75), and Bad (score = 76–100), it leads to the following levels of performance of the settings:
• Setting 1: Basis Sufficient level of performance;
• Setting 2: Pillars Insufficient level of performance;
• Setting 3: Road narrowing Sufficient level of performance;
• Setting 4: Bend Good level of performance.
Steps to measure the social acceptance in a test case:
By interviewing people who are walking in the same traffic environment as the delivery robot, values can be attached to the indicators determining the social acceptance (see an example in Table 9). For this scoring, a Likert scale is used, since it is a well-known and reliable way of determining attitudes and perspectives (McLeod, 2019).

TABLE 9. Example of survey result by a respondent.
For the evaluation of the data, a multi-criteria analysis is used. This implies that different scores can be given to different settings also with different weights for each factor (criterium). The template of the survey can be found in (Arntz, 2022).
Steps to analyse the social acceptance:
o Summarise results per scenario;
⁃ Multiply the weight of each factor by the score of that factor per scenario, per respondent;
⁃ Add up multiplications of factors;
⁃ Calculate average score per scenario;
o Calculate variance of weighted scores of respondents per factor within a scenario;
o Interpret the results;
o Translate scores to the level of social acceptance.
Table 10 shows the acceptance scores per respondent per scenario. As a remark, it should be mentioned here that the application of the method is just for illustration purposes. In this demonstration, we could interview just 10 persons.
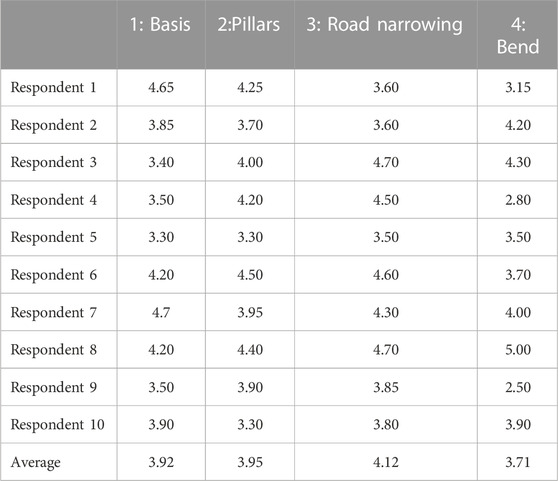
TABLE 10. Acceptance scores per respondent per scenario.
The results (see Table 10) show that the acceptance score is the highest in scenario 3 (score 4.12) and the lowest in scenario 4 (3.71). The acceptance scores of scenarios 1 and 2 are very close to each other (3.92 and 3.95), whereby scenario 2 has a slightly higher score.
Besides the calculation of the weighted scores, it is also important to check the variances of the factors. It provides an indication of how much the respondents agree upon the factors in each scenario. The highest variances can be found in scenario 3 (see Table 11). There is less unanimity than in other scenarios. Furthermore, in every scenario, the factor predictability has the lowest variance, which implies similar consensus on this factor.

TABLE 11. Scores and variances of the acceptance factors in scenario 3: Road Narrowing.
The final step is to combine the performance score with the social acceptance score into one table (see Table 12).

TABLE 12. Roboreadiness scores (white = acceptance, grey = no acceptance).
Steps to analyse the roboreadiness:
o Check per scenario if the performance score is sufficient enough (in our case it was set at 50) and if social acceptance is achieved;
o Level the scores;
(i) If requirements are met;
⁃ Combining the acceptance score and the performance score per scenario;
⁃ Determine the level of roboreadiness of the traffic environment by taking the average of the sum of levels per scenario;
(ii) If requirements are not met;
⁃ Check colour of box as the combination of acceptance score and performance score per scenario;
⁃ Determine the level of roboreadiness of traffic environment by taking the average of sum of levels per scenario (maximum level = not roboready).
The first step in the analysis of the roboreadiness is to check whether the performance and acceptance requirements are met. The performance has to have a maximum score of 50 in all settings. Above this score, the performance is insufficient, and thus the traffic environment not suitable. Furthermore, in all settings the robot has to be accepted in order for the traffic environment to be roboready. If the acceptance score in a scenario is above 4.00, and the performance score is between 25 and 50, the robot is not accepted.
In our case, the traffic environment is not roboready. Now that it is clear when the traffic environment is roboready, it is time to translate the results to the level of roboreadiness. The degree of readiness of the traffic environment for delivery robots to drive there is negatively correlated with the performance and acceptance scores. The lower the performance score in the scenarios, the more roboready the traffic environment is. The lower the acceptance score of people in the scenarios, the faster they accept the robot, so the more roboready the traffic environment is. It is assumed that the performance and acceptance scores have the same weight, so the aspects both count for 50%. In our case, 50% for performance and acceptance are chosen, but this could of course be changed in case the performance is found more dominant in a specific traffic setting.
Analysing the results leads to the following performance and acceptance scores:
1. Basis: Performance score = 50, Acceptance score = 3.92
2. Pillars: Performance score = 60, Acceptance score = 3.95
3. Road narrowing: Performance score = 40, Acceptance score = 4.12
4. Bend: Performance score = 20, Acceptance score = 3.71
Translating these scores according to the steps mentioned leads to the following level of performance and level of social acceptance:
1. Sufficient level of performance/Social acceptance achieved
2. Insufficient level of performance/Social acceptance not achieved
3. Sufficient level of performance/Social acceptance not achieved
4. Good level of performance/Social acceptance not achieved
To achieve roboreadiness, performance and acceptance both have to reach a minimal level. The performance must not have a score of more than 50, to have a sufficient level of performance. Setting 2 does not meet this requirement, since it has a performance score of 60 meaning an insufficient level of performance. Moreover, social acceptance has to be achieved in all settings. In setting 2 and 3 this is not the case. The performance is too poor to achieve social acceptance. Since the requirements are not met in all settings, it can be stated that based on the results of the assessment method, the traffic environment is not roboready at the campus of the Erasmus University Rotterdam.
4 Discussion
The case provided first insights regarding the roboreadiness of the campus of the Erasmus University Rotterdam. Overall, the findings indicate that setting spaces to pass each other easily are the most important. This combines well with the fact that the predictability of the delivery robot seems important, because with more free space on the road a worse predictability might be less applicable.
With the development and demonstration of the roboreadiness assessment method, this research contributes to system design approaches in the field of delivery robots. Being able to determine the level of roboreadiness of a traffic environment can support in the future roll-out of delivery robots in the public space. The research shows some limitations. First of all, the scope of the method is limited. The assessment method is only meant for active modes environments, and no difficult traffic situations are taken into account. Therefore, the method can only be representative for similar traffic environments as the campus of the Erasmus University Rotterdam. This makes that (the results of) the survey may not be representative for future projects. People may assess their acceptance differently when delivery robots are more common.
5 Conclusion and recommendations
In this paper, an assessment method is proposed that can be used to determine the roboreadiness of a traffic environment. To be able to do so, it is important to assess both the performance of the robot in traffic as well as its social acceptance. A methodology was established that can assess the factors involved. This can be done by means of a driving test and a survey, executed in specified settings. With the test, the performance factors can be assessed by observing the delivery robot while in operation. With the survey, the level of acceptance can be determined by asking people to weigh and score the acceptance factors per scenario. After the analysis of the results obtained from the test case and the survey, the level of performance and social acceptance of the settings can be calculated. These together determine the level of roboreadiness of the traffic environment.
Since delivery robots are a relatively new concept, there are a lot of research opportunities. Further research could follow up making improvements to the method presented here. A key point of improvement would be using data from the robot instead of from personal observations, so that assessments would take less time. Furthermore, in the determination of the level of roboreadiness, currently the level of performance and the level of social acceptance have the same weight. Alternative weights that represent the preferences of stakeholders, and their effects on roboreadiness, could be investigated. Research is also needed to investigate the influence of the traffic environment on performance and social acceptance. Finally, the proposed assessment method could be executed on different cases at a larger scale to produce a stable method that can be implemented in different situations.
Data availability statement
The datasets presented in this study can be found in online repositories. The names of the repository/repositories and accession number(s) can be found below: https://repository.tudelft.nl/islandora/object/uuid%3A9cf2a7cb-4130-4c48-96d9-a485b26df42b?collection=education.
Ethics statement
Ethical review and approval was not required for the study on human participants in accordance with the local legislation and institutional requirements. Written informed consent for participation was not required for this study in accordance with the national legislation and the institutional requirements.
Author contributions
The authors confirm their contribution to the paper as follows: study conception and design: All authors; data collection: EA; analysis and interpretation of results: All authors; draft manuscript preparation: EA, JV, AV, and LT. All authors reviewed the results and approved the final version of the manuscript.
Conflict of interest
EA was employed by Jelmer, TK was employed by The Future Mobility Network.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abrams, A. M., Dautzenberg, P. S., Jakobowsky, C., Ladwig, S., and Rosenthal-Von Der Pütten, A. M. (2021). A theoretical and empirical reflection on technology acceptance models for autonomous delivery robots. ACM/IEEE Int. Conf. Human-Robot Interact., 272–280. doi:10.1145/3434073.3444662
Arntz, E. M. (2022). Are we roboready? Developing a method to determine the roboreadiness of a traffic environment, TIL-Master thesis. Delft: Delft University of Technology.
Boysen, N., Fedtke, S., and Schwerdfeger, S. (2020). Last-mile delivery concepts: A survey from an operational research perspective. OR Spectr. 43 (1), 1–58. doi:10.1007/S00291-020-00607-8
Castritius, S. M., Lu, X. Y., Bernhard, C., Liebherr, M., Schubert, P., and Hecht, H. (2020). Public acceptance of semi-automated truck platoon driving. A comparison between Germany and California. Transp. Res. Part F Traffic Psychol. Behav. 74, 361–374. doi:10.1016/J.TRF.2020.08.013
Chen, C., Demir, E., Huang, Y., and Qiu, R. (2021). The adoption of self-driving delivery robots in last mile logistics. Transp. Res. Part E Logist. Transp. Rev. 146, 102214. doi:10.1016/J.TRE.2020.102214
Davis, F. D. (1989). Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Q. 13 (3), 319–340. doi:10.2307/249008
Devine-Wright, P. (2007). “Reconsidering public acceptance of renewable energy technologies: A critical review,” in Taking climate change seriously: A low carbon future for the electricity sector. Editors J. Grubb, and Pollitt (Cambridge: Cambridge University Press).
Dillon, A. (2001). User acceptance of information technology. Encycl. Hum. Factors Ergonomics 1, 1105–1109.
Figliozzi, M., and Jennings, D. (2020). Autonomous delivery robots and their potential impacts on urban freight energy consumption and emissions. Transp. Res. Procedia 46, 21–28. doi:10.1016/J.TRPRO.2020.03.159
Fisher, M. (2022). Urban design a permaculture. Available at: http://www.self-willed-land.org.uk/permaculture/urban_design.htm.
Fraedrich, E., and Lenz, B. (2016). “Societal and individual acceptance of autonomous driving,” in Driving: Technical, Legal and social aspects, 621–640. Editors M. Maurer, J. C. Gerdes, B. Lenz, and H. Winner, (Springer Berlin Heidelberg). ISBN 9783662488478. doi:10.1007/978-3-662-48847-8{_}29
Ghazizadeh, M., Lee, J. D., and Boyle, L. N. (2012). Extending the technology acceptance model to assess automation. Extending Technol. Accept. Model assess automation. Cognition, Technol. Work 14 (1), 39–49. doi:10.1007/S10111-011-0194-3
Joerss, M., Schröder, J., Neuhaus, F., Klink, C., and Mann, F. (2016). Parcel delivery - the future of last mile, McKinsey&Company 9, 1–4. Technical report.
Kapser, S., and Abdelrahman, M. (2020). Acceptance of autonomous delivery vehicles for last-mile delivery in Germany – extending UTAUT2 with risk perceptions. Transp. Res. Part C Emerg. Technol. 111, 210–225. doi:10.1016/J.TRC.2019.12.016
Lemardelé, C., Estrada, M., Pagès, L., and Bachofner, M. (2021). Potentialities of drones and ground autonomous delivery devices for last-mile logistics. Transp. Res. Part E Logist. Transp. Rev. 149, 102325. doi:10.1016/J.TRE.2021.102325
Li, J., Rombaut, E., and Vanhaverbeke, L. (2021). A systematic review of agent-based models for autonomous vehicles in urban mobility and logistics: Possibilities for integrated simulation models. Comput. Environ. Urban Syst. 89, 101686. doi:10.1016/J.COMPENVURBSYS.2021.101686
McLeod, S. (2019). Likert scale definition, examples and analysis. Available at: https://www.simplypsychology.org/.
Osswald, S., Wurhofer, D., Trösterer, S., Beck, E., and Tscheligi, M. (2012). “Predicting information technology usage in the car: Towards a car technology acceptance model,” in Automotive UI 2012 - 4th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seattle, USA, October 2012, 51–58. doi:10.1145/2390256.2390264
Oztemel, E., Kubat, C., Uygun, O., Canvar, T., Korkusuz, T., Raja, V., et al. (2009). Performance assessment of swarm robots. Hum. Comput. Interact. 7, 361–367. doi:10.1007/978-3-642-02577-8{_}39
Paiva, S., Ahad, M. A., Tripathi, G., Feroz, N., and Casalino, G. (2021). Enabling technologies for urban smart mobility: Recent trends, opportunities and challenges. Sensors 21, 2143. doi:10.3390/S21062143
Ranieri, L., Digiesi, S., Silvestri, B., and Roccotelli, M. (2018). A review of last mile logistics innovations in an externalities cost reduction vision. Sustain. Switz. 10 (3), 782. doi:10.3390/SU10030782
Tian, D., Wu, G., Boriboonsomsin, K., and Barth, M. J. (2018). Performance measurement evaluation framework and Co-Benefit\/Tradeoff analysis for connected and automated vehicles (cav) applications: A survey. IEEE Intell. Transp. Syst. Mag. 10 (3), 110–122. doi:10.1109/MITS.2018.2842020
Tomitsch, M., and Hoggenmueller, M. (2021). “Designing human–machine interactions in the automated city: Methodologies, considerations, principles, Advances in 21st century human settlements, 2021, 25–49. doi:10.1007/978-981-15-8670-5{_}2
Keywords: delivery robots, traffic environment, operational design domain, social acceptance, performance-based design, city logistics
Citation: Arntz EM, Van Duin JHR, Van Binsbergen AJ, Tavasszy LA and Klein T (2023) Assessment of readiness of a traffic environment for autonomous delivery robots. Front. Future Transp. 4:1102302. doi: 10.3389/ffutr.2023.1102302
Received: 18 November 2022; Accepted: 26 January 2023;
Published: 08 February 2023.
Edited by:
Kinga Elzbieta Kijewska, Maritime University of Szczecin, PolandReviewed by:
Antonio Polimeni, University of Messina, ItalyCristian Gomez-Marin, Metropolitan Institute of Technology, Colombia
Copyright © 2023 Arntz, Van Duin, Van Binsbergen, Tavasszy and Klein. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: J. H. R. Van Duin, ai5oLnIudmFuZHVpbkB0dWRlbGZ0Lm5s