Abstract
This paper surveys the haptic technologies deployed in cars and their uses to enhance drivers’ safety during manual driving. These technologies enable to deliver haptic (tactile or kinesthetic) feedback at various areas of the car, such as the steering wheel, the seat, or the pedal. The paper explores two main uses of the haptic modality to fulfill the safety objective: to provide driving assistance and warning. Driving assistance concerns the transmission of information usually conveyed with other modalities for controlling the car’s functions, maneuvering support, and guidance. Warning concerns the prevention of accidents using emergency warnings, increasing the awareness of surroundings, and preventing collisions, lane departures, and speeding. This paper discusses how haptic feedback has been introduced so far for these purposes and provides perspectives regarding the present and future of haptic cars meant to increase driver’s safety.
1 Introduction
Haptics has taken an important place in our everyday human–computer interactions. Most mobile phones are nowadays equipped with a vibration actuator providing tactile/kinesthetic feedback to notify users of incoming phone calls.
From a commercial viewpoint, it is only recently that haptics was introduced to a task done everyday by millions of people: driving.
Drivers are expected to maintain their visual attention to the road. However, devices such as mobile phones or GPS device could cause security problems as they require visual attention from drivers (Strayer and Drews, 2007; Benedetto et al., 2012). Oral discussions or noisy children can also drag the driver’s attention due to their verbal content or startling effect, threatening driver’s safety (Pettitt et al., 2005; Politis et al., 2014a). This raises the need to be able to quickly convey information to drivers without adding cognitive load to them. A solution would be to introduce and use haptic feedback to convey information. Indeed, while the visual and auditory channels of the driver are often heavily engaged, the tactile and kinesthetic channels are not.
Haptic feedback seem effective as substitute to visual and audio feedback and tend to be quickly perceived by drivers (Scott and Gray, 2008). Unlike the light signals on the dashboard, haptic feedback can be perceived even in high cognitive load conditions like traffic jams (Murata and Kuroda, 2015). It also appears to be more effective to warn drivers about emergency safety issues than visual or auditory feedback (Politis et al., 2014b). Various areas of the driver’s body are also in constant contact with parts of the car, such as the hands for the steering wheel, making them obvious locations for haptic stimulation during driving (Hjelm, 2008). Thus, “Haptic cars” could take advantage of using haptic feedback to convey information to drivers.
There have been already papers related to the analysis of the use of haptic feedback in cars. Van Erp and Van Veen (2001) proposed a classification of information, which could be presented in cars using tactile feedback. They distinguished four applications, which could be addressed by tactile feedback: safety, assistance, fun, and efficiency. Petermeijer et al. (2015) presented recently an overview proposing an evaluation of haptic systems on driver performance and behavior. This overview was focused on the measures collected during experimental studies (i.e., reaction time) designed to assess the efficiency of haptic systems and the validation of experimental protocols. Chang et al. (2011) proposed a more technological point-of-view of haptic systems proposed in cars for information presentation and warning purposes. This study was restricted to haptic seats. In contrast, our survey focuses on haptic technologies proposed in cars to enhance the driver’s safety during manual driving. It categorizes them in two classes: haptic assistance systems and haptic warning systems. Our survey covers the various areas that could be stimulated using tactile or kinesthetic feedback to convey information to drivers. Our objective is twofold: 1. highlight the existing technologies and their advantages as well as their main limitations, and 2. provides some guidelines for future works.
The remaining of the paper is organized as follows. The next section introduces the available haptic technologies in cars and their associated uses. The two following sections present the two classes of haptic systems to enhance safety in the car. Finally, a discussion and perspectives for future work are exposed.
2 Haptic Technologies in Cars
The haptic modality includes two kinds of haptic feedback: tactile and kinesthetic. The tactile feedback addresses the tactile perception from the skin, such as vibrations. The kinesthetic feedback addresses the kinesthetic perception of our own muscular effort. The haptic modality distinguishes itself from visual and auditory senses as most devices for haptic stimulations require a physical contact with users. This explains why haptic actuators have to be at specific locations in the car (see Figure 1).
Figure 1
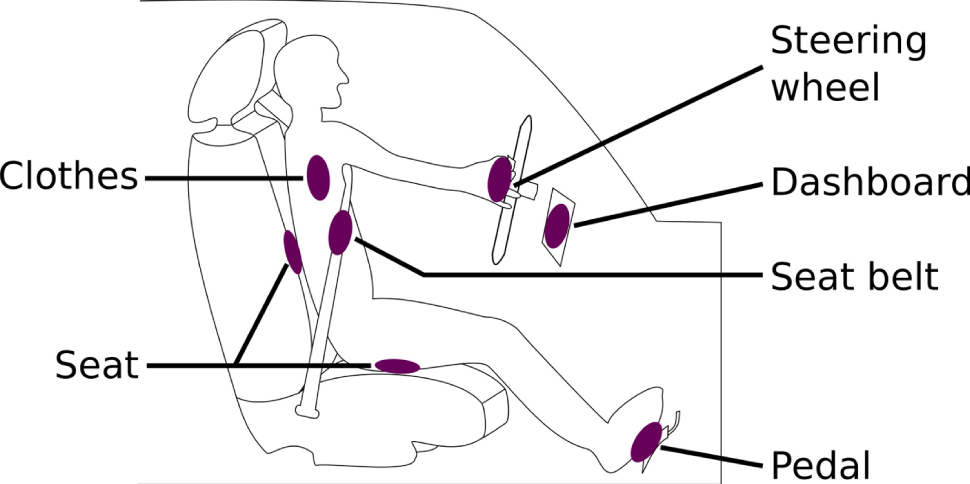
The haptic car: areas for haptic stimulation in a car.
Haptic feedback can be directly deployed in the car to stimulate various parts of the drivers body, which are already in contact with various parts of the car:
Steering wheel, in physical contact with the driver’s fingers.
Seat belt, in physical contact with the driver’s torso.
Pedal, in physical contact with the driver’s foot.
Seat, in physical contact with the driver’s back and legs.
Dashboard, in physical contact with the driver’s fingers.
Clothes, in physical contact with the driver’s body.
These different areas can be used to send various kinds of information to the driver.
Van Erp and Van Veen (
2001) identified five classes of information that can be interesting to be displayed in cars using the haptic modality:
Spatial information. To perceive the position of objects all around the car for users.
Warning signals. To warn the driver about immediate dangers.
Communication. To communicate silently and privately information to the driver, without annoying the passengers.
Coded information. To communicate information representing the status of the car (such as current temperature).
General. To give information on the settings of switches and buttons, indicate preference points, etc.
Some existing uses could overlap multiple categories. For instance, warning user of the presence of an object ahead of the car could correspond to both spatial information and warning signal. Besides, our survey focuses on safety improvement. We investigate especially the use of haptic feedback for conveying spatial information, warning signals, and coded information.
This explains our survey uses a classification inspired by the one of Petermeijer et al. (
2015). They distinguished two categories of use for haptic technologies in cars: guidance systems, which continuously support the driver when the corresponding systems are activated, and warning systems, which activate themselves when a threshold is exceeded to inform the driver about an event. To avoid confusions between the guidance systems category and the GPS-like navigation purpose, the current survey uses the term of assistance systems instead of guidance systems, which also includes for instance maneuver support for parking. Thus, we define and will further refer to “haptic assistance systems” and “haptic warning systems” as follows:
Haptic assistance systems are defined as the on-board systems used to provide assistance to the driver using the haptic modality. In this case, drivers initiated voluntarily an operation and haptic feedback are triggered accordingly to this operation. The uses include controlling the car’s functions located on the dashboard, maneuvering support, and guidance.
Haptic warning systems are defined as the on-board systems used to provide warnings to the driver using the haptic modality. Such warnings are not responding to a voluntary driver’s operation. The uses include improving awareness of surroundings, collision prevention, lane departure prevention, and speed control.
The two next sections introduce the haptic technologies corresponding to these two types of haptic systems.
3 Haptic Assistance Systems
Several haptic technologies were proposed to assist drivers in operating their car while receiving information through the haptic modality. This section is divided in three parts corresponding to the three categories of haptic assistance systems: controlling the different functions of the car, supporting maneuvers and guiding the driver. The corresponding uses are illustrated in Figure 2.
Figure 2
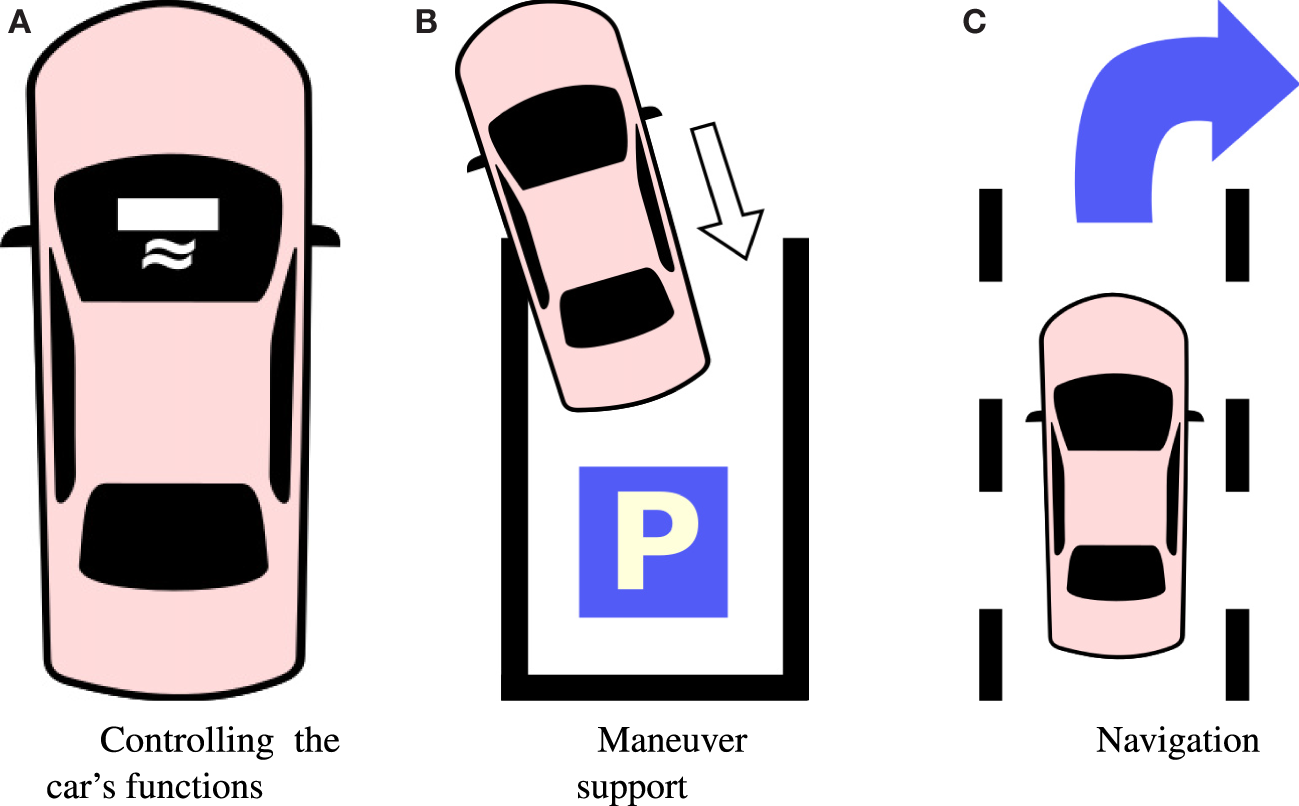
Haptic assistance systems: controlling the different functions of the car, support to maneuver the car, and guiding the driver. (A) Controlling the car’s functions, (B) maneuver support, (C) navigation.
3.1 Controlling the Car’s Functions
Nowadays, drivers have to deal with an increasing amount of technologies integrated to the car, such as radio or air conditioner. These technologies are commonly controlled though the dashboard of the car, using buttons or sliders as input. Interacting with the dashboard is a complex task, as it requires us to maintain our eyes on the road while performing fine motoric control.
Pitts et al. (2012) showed that providing a vibrotactile feedback during a user’s pressure on the tactile dashboard tends to reduce glance duration on the dashboard screen, from 2.96 to 2.40 s. This decrease is more pronounced with a slow responsive interface, simulated in their experiment by a delayed visual feedback. Current dashboards also include devices such as rotary knobs and sliders. These kinds of devices require precise selections. Grane and Bengtsson (2013) used a tactile rotary device called the Alps Haptic Commander device as a substitute to a visual interface to perform a menu selection as a secondary task while changing lanes. This device enables to convey haptically texture information by repeating click effects. They observed that adding this secondary task increased driving deviation when the interface had only a visual feedback about the selected item. However, when adding a haptic feedback to the visual feedback to haptically perceive the selection on the rotary device, the number of driving deviations did not change. Mullenbach et al. (2013) proposed a haptic slider, providing a tactile stimulation each time the value on the slider changes. This slider used a tactile pattern display located below the center console and enables to control its coefficient of friction. Mullenbach et al. (2013) showed that a haptic feedback decreases the total eyes-off-road time by 19% compared to a visual feedback, going up to 39% when the feedback consists in a visuo-haptic combination.
However, the use of haptic feedback for controlling the car’s functions should not be limited to the dashboard as recent cars have also buttons placed on the steering wheel. Most of the haptic feedback previously presented could be applied to buttons located on the steering wheel. Using vibrations on the steering wheel remains to be investigated further as it is currently focused on perceptive studies and not on the design of novel kinds of interfaces. Diwischek and Lisseman (2015) evaluated four different vibration frequencies and two waveforms in terms of user preference. Their results suggest that a frequency of 230 Hz was the most preferred, and a frequency of 105 Hz was the least preferred compared to frequencies of 135 and 175 Hz. Besides, users significantly preferred sinusoidal signal waveforms than a fall-lunge-decay waveforms, no matter the frequency. However, the stimuli should also be easy to discriminate to avoid the need for the driver of looking at the dashboard. Vibrations as feedback on the steering wheel nevertheless display a limitation as they could interfere with vibrations caused by the road.
In a nutshell, tactile feedback at the level of either the dashboard or the steering wheel remains the main source of haptic information, which has been proposed for enabling to control the functions of the car so far. These two locations (steering wheel and dashboard) are indeed and usually associated with the standard interfaces used to control the car’s functions.
3.2 Maneuver Support
Some specific driving tasks as parking require more complex and difficult maneuvers than others. Such operations require a high load of cognitive resources, pushing most automobile manufacturers to equip their cars with, for instance, a self-parking function. However, some drivers do not trust in an automation of their car (Koo et al., 2014). Haptic feedback was then proposed to help drivers during complex driving-related maneuver, without using a complete automation.
A first example of a complex maneuver is perpendicular parking. A haptic steering wheel was proposed by Hirokawa et al. (2014) to help drivers to operate perpendicular parking. Their system evaluates the required steering movements to perform parking and guides the driver in their execution using kinesthetic feedback at the steering wheel. This allows supporting the driver, who remains in total control of the car without automation. Another example of driving maneuver is driving backward. Most recent cars are equipped with a camera placed behind of the car that aims to guide the driver to reduce the cost of awareness of the surroundings. However, the camera does not help when the car has one or multiple trailers. Morales et al. (2013) proposed a haptic solution to avoid unsafe steering movements when the car is attached to multiple passive trailers, such as for tourist road trains. Using hitch sensors, they augmented a steering wheel with force feedback to prevent drivers from exceeding the maximum rotation angles of the trailers.
Manipulating the wheel correctly could also be tricky in normal driving, for instance, when there is low visibility. Profumo et al. (2013) showed that a force-feedback steering wheel could help the driver to handle curves. During a simulated driving task with low visibility, the application of a rotary force on the wheel in the direction of the curves on road helped the driver to maintain his trajectory. There are other sorts of operations implying using the haptic wheel, which could lead to critical injuries on failure, as driving near the car’s handling limits. Katzourakis et al. (2014a) showed that at maximum velocity, a force-feedback assistance on the steering wheel reduces drivers’ mental demand without impairing their driving performance. The feedback decreased the magnitude of the steering torque compared to no feedback. In particular, Katzourakis et al. (2014a) showed that the handling limits of the vehicle are reached less using a force-feedback assistance than without one.
In a nutshell, kinesthetic feedback applied on the steering wheel is the main source of haptic information proposed to help drivers maneuvering their car so far. The main objective of such systems is indeed to assist the driver when manipulating the steering wheel.
3.3 Navigation
Using a navigation system in cars can be distracting for the driver. This kind of system requires to focus on the navigation instructions. They especially require a high level of attention in cities where there are many roads. This justifies the use of the haptic modality for navigation purpose, freeing both driver’s visual and auditory senses.
One of the most common approaches for haptic feedback in navigation purpose is to augment the steering wheel. Ege et al. (2011) proposed a device consisting in two vibrators located at the left and right sides of the steering wheel. This device efficiently reduced navigation errors compared to only auditory feedback, especially in a noisy environment. The participants made 3.7 times less errors using a haptic–auditory feedback compared to an auditory feedback alone. Hwang and Ryu (2010) proposed a more technically advanced approach called the Haptic Wheel that uses 32 actuators distributed all around the steering wheel. This device is able to provide various rendering techniques, such as giving the illusion of displacement by sequentially activating the different actuators around the wheel. It can also provide a sensation of filling by generating vibrations starting from the top of the wheel and actuating actuators clockwise or counterclockwise. Their results showed the best recognition rate occurred when generating two adjacent vibration pulses at a time, going clockwise or counterclockwise.
Using a waist belt constitutes another way to convey directions, enabling tactile stimulations all around the driver. Asif et al. (2012) proposed a wearable belt including 8 tactors located around the belly to indicate directions. Their system provides information on the distance of the turn, depending on the number of times a specific tactor is triggered. They showed that in a high cognitive workload condition, the orientation performance using this device was improved. Besides, their tactile feedback did not increase distraction compared to conventional navigation systems.
Another body area to stimulate for navigation purposes is the back of the driver. Several studies have showed the relevance of using augmented car seats, for instance, using a matrix of actuators. Hogema et al. (2009) developed an 8 × 8 actuator matrix located in the seat pan, providing complex patterns to indicate directions. For example, a “turn left” signal would correspond to an activation of the tactors located on the left side of the seat. An experimental study in-traffic showed almost no direction error. However, the haptic stimuli provided by this device are static as they convey information based only on the location of the stimulated area. Hwang et al. (2012) proposed dynamic haptic feedback using a 5 × 5 actuator matrix located in the back of the seat, conveying information using a sequential activation of the tactors. In this case, a “turn left” signal would correspond to a sequence of activation of the tactors, going from middle-right to middle-left. This system constitutes an alternative way to provide guidance instructions to the driver.
In a nutshell, tactile feedback at the steering wheel or embedded in the driver’s clothes/seat are the two main sources of haptic information, which have been proposed for navigation purpose so far. The steering wheel is the interface used to turn and control the vehicle’s yaw, which motivates the use of a haptic feedback at this location. Then, large areas of the seat or the clothes are in constant physical contact with the driver, enabling to provide rich and precise direction information.
4 Haptic Warning Systems
In order to increase safety in cars, haptic feedback can also be used to warn the driver about immediate dangers, within so-called “haptic warning systems.” This makes them also usable in warning users about immediate dangers. Information about location should require less cognitive resources and be quicker to process with haptic feedback than with visual or auditory feedback. Haptic stimulations have a strong link with spatial location as a stimulate to specific parts of the body. This section is divided in four parts corresponding to the four categories of haptic warning systems: supporting the awareness of the driver about his or her surroundings, warning him about potential collisions, preventing lane departure, and speeding as illustrated in Figure 3.
Figure 3

Haptic warning systems. They are the cause of common accidents: lack of awareness of what is around the car, collisions with other vehicles, lane departure, and speeding. The haptic modality helps to reduce response time while providing spatial information. (A) Awareness of surroundings, (B) collision prevention, (C) lane departure, and (D) speed control.
4.1 Awareness of Surroundings
Visual stimuli are not always effective in catching a driver’s attention as driving already requires a high amount of visual attention. It is often complicated for drivers to have at every time a complete awareness of their surroundings. Tan et al. (2003) stated that the use of localized haptic feedback represent another way convey to drivers spatial information of their surroundings. Ho et al. (2005) proposed for instance a tactile belt worn by the driver around his/her waist to inform him/her of potential collisions. This belt is composed of two actuators, one at the back and one at the front of the driver. One of the actuator is activated in case of potential collisions. When the location of the stimulation is inline with the location of the potential collision (i.e., front when the other vehicle is in front, back when the other vehicle is behind), the reaction time of the driver is decreased. This shows the potential of providing information about location using haptic feedback.
Morrell and Wasilewski (2010) proposed a haptic seat pan using a 3 × 5 matrix of vibrotactile actuators to convey the spatial positions of other nearby vehicles to the driver. Each actuator corresponds to a position relative to the driver. For instance, the bottom-left actuator corresponds to a car currently behind and at the left of the driver. Their preliminary results suggested an improvement of driving performance compared to a rear view mirror used alone, but no further studies were conducted to our knowledge. The use of the haptic feedback enabled to decrease the amount of time with a car in blind spots. Grah et al. (2016) proposed, similarly, a haptic deformable back seat to notify the driver of cars behind him/her. The system was composed of a 4 × 4 matrix of servomotors, each controlling a pushrod applying pressure to the back of the driver, indicating if there is an obstacle while overtaking or changing lane. The primary goal of the system was to encourage the driver to scan the surroundings by providing him/her a feedback about the distance and angle of obstacles.
Enhancing the awareness of the driver could also be helpful during some tasks such as overtaking. Löcken et al. (2015) proposed a haptic belt worn around the waist to help the driver during overtaking tasks. Using six actuators around the waist, the device indicates the presence of surrounding cars to the driver. When another car was already overtaking the participants, they were more likely to renounce to overtake the car in front of them when they had a tactile feedback of their surroundings.
Last, even with mirrors, some surroundings of the car can remain hidden from the driver’s vision. A good example is what is under the car, which cannot be seen by the driver. Ochiai and Toyoshima (2012) proposed a system composed of IR distance sensors located under the car. This matrix is connected through an Arduino microcontroller to a 10 cm × 10 cm matrix of tactors, providing a vibrotactile feedback under the left feet of the driver to notify him/her of what is under the car, for example, to perceive bumps when parking backward.
In a nutshell, a tactile feedback at the seat and/or the driver’s clothes is the main source of haptic information proposed for increasing the awareness of surroundings so far. This is similar to the kind of stimulation used for navigation purposes as there is a need to convey directional information. Only one study proposed a tactile feedback at the pedal in order to provide information regarding objects located under the vehicle.
4.2 Collision Prevention
Collisions cause a high proportion of car-related accidents and can lead to severe injuries (Lao et al., 2014). Avoiding a collision with another car requires a quick reaction from the driver. However, this implies that the driver noticed the imminent collision. This requires a constant focus from the driver on the road and his/her surroundings in cases of lateral or rear-end collisions, which requires a lot of cognitive load. Haptic feedback was shown to be very effective to reduce reaction times in cars. Using a combination of tactors located on the hands and around the wrist, Ahtamad et al. (2015) observed a reduction of braking reaction time from around 1.6 s (without tactile warning) to 1.4 s (with tactile warning). This suggests that the haptic modality is a suitable solution for warning drivers of imminent collision.
The advantage of conveying the information of location of the imminent collision using a haptic belt around the waist was first demonstrated by Ho et al. (2006). They proposed a tactile belt including two actuators: one at the front of the driver and one at his/her back. The actuator in the front is activated when the car in front is too close, and the one in the back is activated when the following car is too close. Fitch et al. (2007) proposed a haptic seat composed of an 8 × 8 matrix of tactors integrated to the pan of the seat. This enables to stimulate a large area of the body, enabling to localize more precisely a collision threat. They evaluated the effectiveness of the device by asking users to localize the stimulation between 8 possible locations. They compared their system with auditory feedback provided by speakers. Compared to an audio warning, the spatial localization of the threat increased from 32 to 84%, and the localization time was reduced by 257 ms using haptic feedback. Gray et al. (2014) proposed the use of three vertically aligned tactors attached to the driver’s waist. They highlight that a sequential activation of these tactors from bottom to top (i.e., toward the head) induced the lowest reaction time. Similar effects on the use of haptic feedback on reaction time were found by de Rosario et al. (2010) who proposed a vibrotactile pedal to warn drivers about frontal collision. They found that drivers could react 0.3 s faster with their device in comparison to a visual warning. Besides, the best performance was obtained when using vibrations ranging from 5 to 10 Hz.
In a nutshell, the areas of stimulation in the car used for collision prevention are the same than for increasing the awareness of surroundings, namely the seat, the driver’s clothes, and the pedal. All feedback concern tactile stimulation and not kinesthetic feedback due to safety reason. The proposed feedback can inform the driver, but does not take control of the car.
4.3 Lane Departure
A common consequence of a driver’s inattention on the road is lane departure (Mattes, 2003). Lane departure could threat the driver’s life if the car ends in a ditch along the road, or collisions with other cars coming from the opposite way. To overcome this issue, some roads are equipped with bumps placed on their lane markings to provide a haptic feedback to the driver when they drive over them. However, these bumps do not exist everywhere.
Tactile feedback located on the steering wheel could be effective to warn drivers of lane departures (Suzukia and Jansson, 2002). They showed that their vibrotactile feedback was intuitive as their participants thought their vehicle was deviating when feeling vibrations, even if they were not previously informed of the meaning of this feedback. Many studies thereafter focused on using haptic signals at the steering wheel for lane departure warnings. Onimaru and Kitazaki (2008) proposed, for instance, a steering wheel with two vibrotactors, one on each side of the wheel. A vibration indicated when the car went away from the center of the road. This display was more efficient than a visual equivalent using two colored disks located at the left and right of the road to help the participants to correct the trajectory of the car. A limitation of these works is that they indicate when and in which direction, but not how much the steering must move to correct the trajectory.
Katzourakis et al. (2013) proposed a kinesthetic steering wheel to prevent lane departure. The steering wheel applied a torque such that the driver and the car turn the steering wheel cooperatively. Tactile feedback was also investigated for lane departure prevention. A vibrotactile seat can also reduce the reaction time during a lane departure compared to an auditory warning, from 1.24 to 0.89 s (Stanley, 2006). Besides, users found this kind of feedback less annoying and providing less interferences than auditory feedback.
Pedals with augmented haptic feedback have also been considered to convey information to the driver. For instance, Kurihara et al. (2013) proposed a tactile pedal that vibrates in case of lane departure. They observed a significant reduction of off-track incidents when using a pedal augmented with a tactile feedback.
In a nutshell, tactile and kinesthetic feedback at the steering wheel are the main kinds of haptic stimulation, which have been proposed to inform drivers of lane departure so far. The steering wheel has to be turned to correct the trajectory. Tactile feedback at the seat and the pedal have also been proposed to decrease reaction times during lane departure.
4.4 Speed Control
The driver is usually informed of the current speed of his/her car with the speedometer. This could lead to safety concerns as maintaining a correct speed requires constant speed control.
In order to control speed using haptics, several previous works mainly applied a haptic feedback on the acceleration pedal as it is the device that is naturally used to control the car’s speed. Adell et al. (2008) proposed an active accelerator pedal using force-feedback to warn drivers in case of speeding by applying a resistance to pressure at the pedal. They observed that the device was more effective in reducing the driver’s speed than combined visual and auditory warnings (flashing red light and beep signal). For example, at a speed limit of 30 km h−1, drivers used to drive at 42 km h−1. Their speed decreased to 38 km h−1 when using visual and auditory feedback and to 35 km h−1 when using a haptic feedback at the pedal.
The same kind of feedback can also be applied to help drivers to maintain a specific speed. Controlling the reaction force of the accelerator pedal appeared to be more effective to help the driver to keep a desired speed than a visual feedback located on the dashboard. Yin et al. (2012) highlighted that haptic feedback provide smoothness in following the desired speed and a shorter reaction time than the visual feedback. The efficiency of their device has also been demonstrated in real driving situations and after a long time deployment. Vlassenroot et al. (2007) showed that in a real driving context where drivers were circulating on a 90 km s−1 road, a pedal augmented with force feedback helped reducing speeding by almost 10%. Moreover, these drivers reported that the system was satisfying and useful.
Finally, tactile feedback was also proposed to encourage eco-driving in cars with manual transmission. Birrell et al. (2013) notably proposed a device consisting in an acceleration pedal, which vibrates when it is time to shift gears. They observed positive effects of the haptic feedback on the accelerations of the driver.
In a nutshell, tactile and kinesthetic feedback at the pedal are the main kinds of haptic stimulation, which were proposed to prevent drivers from speeding so far. Two approaches have been explored: one only informing the driver through tactile feedback, and one inciting the driver to slow down through force feedback.
5 Discussion
5.1 Which Haptic Technology for Which Use?
Multiple haptic technologies were proposed to increase safety and provide assistance and warnings to the drivers. Tables
1and
2provide an overview of all the technologies presented in this paper depending on the targeted use. These tables notably highlight that the different uses involve different locations of stimulation:
The dashboard (tactile) is related to the control of the different functions of the car. This is not surprising as the driver is only in contact with this area when he/she wants to access specific functions.
The steering wheel (tactile) is related to navigation and collision prevention purposes. The wheel is used to change directions and is required in both cases. As the feedback is tactile, it notifies the driver of the danger but does not turn the wheel for him/her.
The steering wheel (kinesthetic) is related to maneuvering assistance. The objective is to help the drivers to manipulate the wheel in order to complete various tasks as parking, explaining the use of force-feedback on the steering wheel.
The seat (tactile) is related to navigation, awareness support, and lane departure. Seats enable to stimulate a large area of the body. All of the corresponding uses are linked with communicating spatial information to the driver.
The clothes (tactile) are related to navigation, awareness support, and collision prevention. Similarly to seats, what all of these cases have in common is that they refer to localization in space, in order to provide guidance information or warn the driver about objects in his/her surroundings.
The pedal (tactile) is related to all presented haptic warning systems. While this feedback could also be used for eco-driving purposes, tactile haptic augmentation of the pedal is more used for warning than assistance purposes (Birrell et al., 2013).
The pedal (kinesthetic) is related only to speed control. To reduce speeding, the accelerator pedal needs to be released. This justifies a kinesthetic feedback in order to suggest to the driver to release the pedal.
Table 1
| Car area | Mod. | Functions control | Maneuver support | Navigation |
|---|---|---|---|---|
| Dashboard | T | Pitts et al. (2012); Grane and Bengtsson (2013); Mullenbach et al. (2013) | NA | NA |
| Steering wheel | T | Diwischek and Lisseman (2015) | NA | Hwang and Ryu (2010); Ege et al. (2011) |
| Steering wheel | K | NA | Morales et al. (2013); Profumo et al. (2013); Hirokawa et al. (2014); Katzourakis et al. (2014a) | NA |
| Seat | T | NA | NA | Hogema et al. (2009); Hwang et al. (2012); Thorslund et al. (2013) |
| Clothes | T | NA | NA | Asif et al. (2012) |
| Pedal | T | NA | NA | NA |
| Pedal | K | NA | NA | NA |
Haptic assistance systems proposed for car safety.
Table 2
| Car area | Mod. | Awareness support | Collision prevention | Lane departure | Speed control |
|---|---|---|---|---|---|
| Dashboard | T | NA | NA | NA | NA |
| Steering wheel | T | NA | NA | Suzukia and Jansson (2002); Onimaru and Kitazaki (2008) | NA |
| Steering wheel | K | NA | NA | Katzourakis et al. (2013) | NA |
| Seat | T | Morrell and Wasilewski (2010); Grah et al. (2016) | Fitch et al. (2007) | Stanley (2006) | NA |
| Clothes | T | Ho et al. (2005); Löcken et al. (2015) | Ho et al. (2006); Gray et al. (2014); Ahtamad et al. (2015) | NA | NA |
| Pedal | T | Ochiai and Toyoshima (2012) | de Rosario et al. (2010) | Kurihara et al. (2013) | Birrell et al. (2013) |
| Pedal | K | NA | NA | NA | Vlassenroot et al. (2007); Adell et al. (2008); Yin et al. (2012) |
Haptic warning systems proposed for car safety.
Many cells of Table 1 are empty due to a lack of corresponding studies. This suggests novel systems and novel paths for haptic technologies. For instance, a tactile steering wheel might display vibrations when speeding, providing the same kind of feedback, which naturally occurs when the wheels of the car are not correctly in contact with road. This would also work with a defective speed regulator as the driver remains in contact with the road, but not with the accelerator pedal.
While using multiple areas to stimulate on the driver’s body have been investigated for some specific uses, all devices are not equal in drawing attention, for instance, for blind spot warnings. Chun et al. (2013) made a comparison between a haptic steering wheel to a haptic seatbelt for blind spot warnings. They showed that a haptic steering wheel provided a better collision prevention rate and a smaller distance of collision avoidance.
Two specific areas for haptic feedback in the car could be further explored: the seat belt and the gearshift. While mentioned in Figure 1, there are few studies as the ones of Scott and Gray (2008) and Chun et al. (2013), which focus of augmenting the seatbelt with haptic feedback. An explanation would be that the seat itself covers a larger area of stimulations than seat belts, which cover only the torso of the driver, while belts around waist provide 360° haptic stimulations. Another area is the gearshift, which was not mentioned on the figure as not all cars have one. In most countries, cars possess an automatic transmission and no gearshift. Manual transmission car could take advantage of a haptic gearshift, for instance, to convince or avoid the driver from shifting the gear.
Finally, the different studies presented mainly focused on static haptic feedback, which do not evolve through time. One of the explanation is that the tactors employed are generally few. Using more complex technology, it becomes possible to convey more precise and intuitive information using dynamic feedback evolving through time (Hwang and Ryu, 2010; Ho et al., 2014). Such feedback could convey, more efficiently, information as direction or distance by activating tactors in sequence. For instance, Meng et al. (2015) displayed that dynamic tactile signals can shorten reaction times.
5.2 Limits of Existing Experimental Protocols
A lot of variables, which might influence results during experiments should be taken in account in future works. For instance, recent studies as the one of Duthoit et al. (2016) showed that light clothes do not change the perception of vibrations issued from the seat. But if one aims to design a haptic seat, the height and weight of the driver could influence the perception of the tactile feedback (Grah et al., 2016). Drivers’ age also matters as people aged more than 60 years old seem to be more affected by the presence of haptic stimuli in cars than younger people (Ahtamad et al., 2015). Other parameters such as the habits of the driver should be investigated or at least controlled, such as the way they use to put their hands on the steering wheel (Walton and Thomas, 2005). These parameters could drastically influence the way drivers perceive haptic feedback.
Most of the studies present here are relatively recent and concern preliminary results or feasibility studies. Then, their first results remain to confirm through deeper investigations. Petermeijer et al. (2015) conducted a complete and extensive survey on the design of experimental protocols to collect representative measures of the improvement of the performance provided by the haptic modality during driving. Considering the measures used to evaluate a haptic system for the driver’s safety is crucial, e.g., a subjective preference for a system does not imply this system is safer. Their survey explored various experimental studies, and their measure to evaluate the efficiency of the proposed systems is a great complement to our own survey, which adopts a more technical point-of-view.
While it is important to control the experiment for valid results, the results from specific uses would not necessarily be applicable to real driving contexts. Most of the researches presented in the current survey use driving simulators as OpenDS1 for their experiments. However, driving in a real environment includes a high number of variables (Morrell and Wasilewski, 2010). For instance, the tactile perception could be influenced during a real and stressful driving environment compared to an experiment in front of a screen. Besides, the influence of ambient vibrations on the driver’s tactile perception in a real driving context should be deeply investigated (Ryu et al., 2010). This explains why systems aiming to enhance safety for drivers should be evaluated in practical use. More experiments in a real environment should be further investigated. As Katzourakis et al. (2014b) stated: “Real car tests are irreplaceable for developing systems related to dynamic driving.” Besides, long-term experiments such as the one proposed by Dass (2013) should be carried out to evaluate if the haptic feedback do not lead to too much driver’s confidence in the car, which could introduce a new kind of risk.
One question remaining is the integration of multiple haptic feedback for different uses in the same car. Confusing a feedback related to collision prevention for a feedback related to navigation purpose could lead to bad consequences. While most works focus on designing a specific feedback for one use, it remains unknown how different haptic feedback could interact all together in a car enhancing (or not) the driver’s safety.
5.3 Toward a Multimodal Car
A haptic feedback alone could be inefficient in some cases. For instance, tactile feedback on the dashboard tend to decrease eyes-off-road, but the real improvements given by this feedback depends on the task. Visual–haptic and auditory–haptic combinations should be further investigated in scenarios with varying primary and secondary task workloads as suggested by Pitts et al. (2012). For example, when the driver is holding a basic conversation on the phone, tactors located on the waist of the driver appeared to be more effective than an audio warning, especially if the driver has a basic conversation (Mohebbi et al., 2015). At the opposite, a multimodal visual–auditory combination seems more effective in a normal driving condition, while a visual–haptic combination seems more effective during a task requiring a heavy cognitive load (Hancock et al., 2013; Mullenbach et al., 2013). Thorslund et al. (2013) showed that the improvement of the performance obtained by tactile feedback is more visible with people with hearing loss, not able to hear instructions from GPS navigation systems.
Haptic feedback appears to be also less effective for certain tasks such as navigation than other modalities, leading to navigation errors (Nukarinen et al., 2014). A solution could be the combination of visual and tactile stimuli. In this configuration, a tactile stimulus notify the driver that a navigation instruction is ready, while the trajectory is still conveyed using the visual modality. This could reduce the time spent looking at the GPS device. These results suggest that the best output modality to communicate with the driver would probably depend on the situation. More detailed guidelines on the use of haptics with other modalities for warnings can notably be found in Haas and Van Erp (2014).
5.4 Applications to Other Means of Travel
All the presented studies concern haptic stimulations in cars, which are the most common type of vehicle. However, the haptic modality could also help enhancing the safety of users of other means of travel. For example, a haptic seat in trucks could all the more enhance spatial awareness as it is difficult to look behind when driving this kind of vehicle, which does not have a rear-view mirror. During an interview, truck drivers reported that the criticality of lane departure is not correctly reflected by auditory warnings (Dass, 2013). After a road test in a real driving task using a vibrotactile seat, these truck drivers reported that the tactile feedback offered them an efficient warning for lane departure. There are also many haptic systems concerning flying vehicles. Arrabito et al. (2011) showed that the haptic modality increases the vigilance of pilots during a flying task, because tactile feedback provide a higher detection rate and shorter responses times to unexpected events than visual feedback. Sklar and Sarter (1999) also noticed that during flying training sessions, users perceive tactile warnings better than visual warnings.
Some of the technologies presented in this study could be directly applied to other vehicles with little adaptation. For instance, clothes providing tactile feedback could be interesting for all vehicles and pedestrians as they are not linked to the car itself. However, other presented technologies might not apply to other vehicles due to large differences in equipment between vehicles. For instance, two-wheeled vehicles as motorcycles often do not have a back on the seat.
6 Conclusion
We have presented a survey on the use of haptic feedback in cars to enhance drivers’ safety. Haptic feedback appears to be an effective way to reduce the visual workload and convey information, such as for preventing from hazards. This encouraged the development of numerous haptic solutions to enhance safety while driving. These solutions consist in augmenting with haptic feedback (either tactile or kinesthetic) in various areas of the car: the dashboard, the steering wheel, the seat, the seat belt, the driver’s clothes, and the accelerator pedal. Each area was shown to be usually linked to specific uses of haptic systems. We identified two main categories of haptic systems for this survey. First, haptic assistance systems aiming to help the driver during task he or she initiated himself or herself. These tasks include controlling the car’s functions, maneuvering his/her vehicle, and navigation. The areas of stimulation used are mainly the dashboard and steering wheel, and the seat for navigation purposes. Second, haptic warning systems aiming to warn the driver of unexpected events threatening his or her safety. The objectives of these systems are to increase awareness of surroundings, collision prevention, lane departure prevention, and speed control. The areas of stimulation used are mainly the seat, clothes, and pedal. However, a lot of paths remain today little explored. For example, some possible areas of stimulation remain little investigated, as for the gearshift. The experimental protocols used to evaluate the improvement given by the haptic systems are also limited as most of them are not investigating real driving contexts. Thus, they do not take in account some variables as the stress that might happen in a real environment, or an overconfidence of the driver in the haptic assistance and warning systems. Besides, the technologies presented here could also be tested in combination with other modalities or in other means of travel than cars. We hope that the information contained in this survey will be helpful for future research toward the haptic car of tomorrow.
Statements
Author contributions
YG did the main part of the research for the survey and wrote the first draft of the paper. AL drew the structure of the paper and its full relecture.
Funding
This work was supported by the European Commission through the HAPPINESS project (SEP-210153552).
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Footnotes
1.^http://www.opends.eu/home (accessed March 25, 2018).
References
1
AdellE.VárhelyiA.HjälmdahlM. (2008). Auditory and haptic systems for in-car speed management – a comparative real life study. Transp. Res. Part F Traffic Psychol. Behav.11, 445–458.10.1016/j.trf.2008.04.003
2
AhtamadM.GrayR.HoC.ReedN.SpenceC. (2015). “Informative collision warnings: effect of modality and driver age,” in Proceedings of the Eight International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design (Salt Lake City, Utah), 330–336.
3
ArrabitoG. R.HoG.AghaeiB.BurnsC.HouM. (2011). Effects of vibrotactile stimulation for sustaining performance in a vigilance task: a pilot study. Proc. Hum. Factors Ergon. Soc. Ann. Meet.55, 1160–1164.10.1177/1071181311551242
4
AsifA.BollS.HeutenW. (2012). Right or left: tactile display for route guidance of drivers. Inf. Technol.54, 188–198.10.1524/itit.2012.0681
5
BenedettoA.CalviA.D’AmicoF. (2012). Effects of mobile telephone tasks on driving performance: a driving simulator study. Adv. Transp. Stud.26, 29–44.10.4399/97888548465863
6
BirrellS. A.YoungM. S.WeldonA. M. (2013). Vibrotactile pedals: provision of haptic feedback to support economical driving. Ergonomics56, 282–292.10.1080/00140139.2012.760750
7
ChangW.HwangW.JiY. G. (2011). Haptic seat interfaces for driver information and warning systems. Int. J. Hum. Comput. Interact.27, 1119–1132.10.1080/10447318.2011.555321
8
ChunJ.LeeI.ParkG.SeoJ.ChoiS.HanS. H. (2013). Efficacy of haptic blind spot warnings applied through a steering wheel or a seatbelt. Transp. Res. Part F Traffic Psychol. Behav.21, 231–241.10.1016/j.trf.2013.09.014
9
DassD. (2013). “Haptic in-seat feedback for lane departure warning,” in Proceedings of the 5th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (Eindhoven, Netherlands), 258–261.
10
de RosarioH.LouredoM.DíazI.SolerA.GilJ. J.SolazJ. S.et al (2010). Efficacy and feeling of a vbrotactile frontal collision warning implemented in a haptic pedal. Transp. Res. Part F Traffic Psychol. Behav.13, 80–91.10.1016/j.trf.2009.11.003
11
DiwischekL.LissemanJ. (2015). “Tactile Feedback for Virtual Automotive Steering Wheel Switches,” in Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (Nottingham, United Kingdom), 31–38.
12
DuthoitV.SieffermannJ.-M.EnrègleE.BlumenthalD. (2016). “Perceived intensity of vibrotactile stimuli: do your clothes really matter?” in Eurohaptics, eds BelloF.KajimotoH.VisellY. (London, UK: Springer), 412–418.
13
EgeE. S.CetinF.BasdoganC. (2011). “Vibrotactile feedback in steering wheel reduces navigation errors during GPS-guided car driving,” in IEEE World Haptics Conference (Istanbul, Turkey), 345–348.
14
FitchG. M.KieferR. J.HankeyJ. M.KleinerB. M. (2007). Toward developing an approach for alerting drivers to the direction of a crash threat. Hum. Factors49, 710–720.10.1518/001872007X215782
15
GrahT.EppF.MeschtscherjakovA.TscheligiM. (2016). “Dorsal haptic sensory augmentation: fostering drivers awareness of their surroundings with a haptic car seat,” in International Conference on Persuasive Technology (Salzburg, Austria), 59–62.
16
GraneC.BengtssonP. (2013). Driving performance during visual and haptic menu selection with in-vehicle rotary device. Transp. Res. Part F Traffic Psychol. Behav.18, 123–135.10.1016/j.trf.2012.12.011
17
GrayR.HoC.SpenceC. (2014). A comparison of different informative vibrotactile forward collision warnings: does the warning need to be linked to the collision event?PLoS ONE9:e87070.10.1371/journal.pone.0087070
18
HaasE. C.Van ErpJ. B. F. (2014). Multimodal warnings to enhance risk communication and safety. Saf. Sci.61, 29–35.10.1016/j.ssci.2013.07.011
19
HancockP.MercadoJ.MerloJ.Van ErpJ. (2013). Improving target detection in visual search through augmenting multi-sensory cues. Ergonomics56:729–738.10.1080/00140139.2013.771219
20
HirokawaM.UesugiN.FurugoriS.KitagawaT.SuzukiK. (2014). Effect of haptic assistance on learning vehicle reverse parking skills. IEEE Trans. Haptics7, 334–344.10.1109/TOH.2014.2309135
21
HjelmJ. (2008). Haptics in cars, Seminar “Haptic communication and Interaction in Mobile Contexts,”University of Tampere.
22
HoC.GrayR.SpenceC. (2014). Reorienting driver attention with dynamic tactile cues. IEEE Trans. Haptics7, 86–94.10.1109/TOH.2013.62
23
HoC.ReedN.SpenceC. (2006). Assessing the effectiveness of “intuitive” vibrotactile warning signals in preventing front-to-rear-end collisions in a driving simulator. Accid Anal. Prev.38, 988–996.10.1016/j.aap.2006.04.002
24
HoC.TanH. Z.SpenceC. (2005). Using spatial vibrotactile cues to direct visual attention in driving scenes. Transp Res. Part F Traffic Psychol. Behav.8, 397–412.10.1016/j.trf.2005.05.002
25
HogemaJ.De VriesS.Van ErpJ.KieferR. (2009). A tactile seat for direction coding in car driving: field evaluation. IEEE Trans. Haptics2, 181–188.10.1109/TOH.2009.35
26
HwangJ.ChungK.HyunJ.RyuJ.ChiK. (2012). Development and evaluation of an in-vehicle haptic navigation system. Inform. Technol. Convergence Secure Trust Comput Data Manag.180, 47–53.10.1007/978-94-007-5083-8_8
27
HwangS.RyuJ. H. (2010). “The haptic steering wheel: vibro-tactile based navigation for the driving environment,” in IEEE International Conference on Pervasive Computing and Communications Workshops (Mannheim, Germany), 660–665.
28
KatzourakisD. I.de WinterJ. C. F.AlirezaeiM.CornoM.HappeeR. (2013). Road-departure prevention in an emergency obstacle avoidance situation. IEEE Trans. Sys. Man Cybern. Syst.44, 1.10.1109/TSMC.2013.2263129
29
KatzourakisD. I.VelenisE.HolwegE.HappeeR. (2014a). Haptic steering support for driving near the vehicle’s handling limits: test-track case. IEEE Trans. Intell. Transp. Syst.15, 1781–1789.10.1109/TITS.2014.2318520
30
KatzourakisD. I.VelenisE.HolwegE.HAPPEER. (2014b). Haptic steering support for driving near the vehicle’s handling limits; skid-pad case. Int. J. Automot. Technol.15, 151–163.10.1007/s12239-014-0017-7
31
KooJ.KwacJ.JuW.SteinertM.LeiferL.NassC. (2014). Why did my car just do that? Explaining semi-autonomous driving actions to improve driver understanding, trust, and performance. Int. J. Interact. Des. Manuf.9, 269–275.10.1007/s12008-014-0227-2
32
KuriharaY.HachisuT.SatoM.FukushimaS.KajimotoH. (2013). “Periodic tactile feedback for accelerator pedal control,” in World Haptics Conference (WHC) (Daejeon, Korea), 187–192.
33
LaoY.ZhangG.WangY.MiltonJ. (2014). Generalized nonlinear models for rear-end crash risk analysis. Accid. Anal. Prev.62, 9–16.10.1016/j.aap.2013.09.004
34
LöckenA.BuhlH.HeutenW.BollS. (2015). “TactiCar: Towards Supporting Drivers During Lane Change Using Vibro-Tactile Patterns,” in Adjunct Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (Nottingham, United Kingdom), 32–37.
35
MattesS. (2003). “The lane change task as a tool for driver distraction evaluation,” in Quality of Work and Products in Enterprises of the Future, eds StrasserH.RauschH.BubbH. (Stuttgart: Ergonomia Verlag), 1–30.
36
MengF.GrayR.HoC.AhtamadM.SpenceC. (2015). Dynamic vibrotactile signals for forward collision avoidance warning systems. Hum. Factors57, 329–346.10.1177/0018720814542651
37
MohebbiR.GrayR.TanH. (2015). Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Hum. Factors J. Hum Factors Ergon. Soc.51, 102–110.10.1177/0018720809333517
38
MoralesJ.MandowA.MartínezJ. L.ReinaA. J.García-CerezoA. (2013). Driver assistance system for passive multi-trailer vehicles with haptic steering limitations on the leading unit. Sensors Basel Sensors13, 4485–4498.10.3390/s130404485
39
MorrellJ.WasilewskiK. (2010). “Design and evaluation of a vibrotactile seat to improve spatial awareness while driving,” in Haptics Symposium, 2010 IEEE (Waltham, Massachusetts), 281–288.
40
MullenbachJ.BlommerM.ColgateJ. E.PeshkinM. A. (2013). Reducing Driver Distraction with Touchpad Physics. Thesis, Master of Mechanical Engineer, Evanston, IL: Northwestern University.
41
MurataA.KurodaT. (2015). “Effects of auditory and tactile warning on drivers’ response to hazard under noisy environment,” in International Conference on Engineering Psychology and Cognitive Ergonomics, (Los Angeles) 45–53.
42
NukarinenT.RaisamoR.FarooqA.EvreinovG.SurakkaV. (2014). “Effects of directional haptic and non-speech audio cues in a cognitively demanding navigation task,” in Proceedings of the 8th Nordic Conference on Human-Computer Interaction Fun, Fast, Foundational – NordiCHI ’14 (Helsinki, Finland), 61–64.
43
OchiaiY.ToyoshimaK. (2012). “Invisible feet under the vehicle,” in Augmented Human International Conference (Megève, France), 1–2.
44
OnimaruS.KitazakiM. (2008). “Visual and tactile information to improve drivers’ performance,” in IEEE Virtual Reality (Massachusetts, USA), 295–296.
45
PetermeijerS. M.AbbinkD. A.MulderM.De WinterJ. C. F. (2015). The effect of haptic support systems on driver performance: a literature survey. IEEE Trans. Haptics8, 467–479.10.1109/TOH.2015.2437871
46
PettittM.BurnettG.StevensA. (2005). “Defining driver distraction,” in World Congress on Intelligent Transport Systems (San Francisco, CA, USA), 12.
47
PittsM. J.BurnettG.SkrypchukL.WellingsT.AttridgeA.WilliamsM. A. (2012). Visual-haptic feedback interaction in automotive touchscreens. Displays33, 7–16.10.1016/j.displa.2011.09.002
48
PolitisI.BrewsterS. A.PollickF. (2014a). Evaluating multimodal driver displays under varying situational urgency. Chi 2014 (Seattle, WA), 4067–4076.10.1145/2667317.2667318
49
PolitisI.BrewsterS.PollickF. (2014b). “Speech tactons improve speech warnings for drivers,” in Proceedings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications – AutomotiveUI ’14 (Toronto, Canada), 1–8.
50
ProfumoL.PolliniL.AbbinkD. A. (2013). “Direct and indirect haptic aiding for curve negociation,” in IEEE International Conference Systems Man and Cybernetics (Manchester, United Kingdom), 1846–1852.
51
RyuJ.ChunJ.ParkG.ChoiS.HanS. H. (2010). Vibrotactile feedback for information delivery in the vehicle. IEEE Trans. Haptics3, 138–149.10.1109/TOH.2010.1
52
ScottJ. J.GrayR. (2008). A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Hum. Factors50, 264–275.10.1518/001872008X250674
53
SklarA. E.SarterN. B. (1999). Good vibrations: tactile feedback in support of attention allocation and human-automation coordination in event-driven domains. Hum. Factors41, 543–552.10.1518/001872099779656716
54
StanleyL. M. (2006). Haptic and auditory cues for lane departure warnings. Proc. Hum. Factors Ergon. Soc. Ann. Meet.50, 2405–2408.10.1177/154193120605002212
55
StrayerD. L.DrewsF. A. (2007). Cell-phone? Induced driver distraction. Curr. Dir. Psychol. Sci.16, 128–131.10.1111/j.1467-8721.2007.00489.x
56
SuzukiaK.JanssonH. (2002). An analysis of driver’s steering behavior during auditory or haptic warnings for the designing of lane departure warning system. JSAE Rev.24, 65–70.10.1016/S0389-4304(02)00247-3
57
TanH. Z.GrayR.YoungJ. J.TraylorR. (2003). A haptic back display for attentional and directional cueing. Haptics-e3, 1–20. 10.1.1.13.9848
58
ThorslundB.PetersB.HerbertN.HolmqvistK.LidestamB.BlackA. A.et al (2013). Hearing loss and a supportive tactile signal in a navigation system: effects on driving behavior and eye movements. J. Eye Move. Res.6, 1–9.10.16910/jemr.6.5.1
59
Van ErpJ.Van VeenH. (2001). “Vibro-tactile information presentation in automobiles,” in Proceedings of Eurohaptics (Birmingham, UK), 99–104.
60
VlassenrootS.BroekxS.MolJ. D.PanisL. I.BrijsT.WetsG. (2007). Driving with intelligent speed adaptation: final results of the Belgian ISA-trial. Transp. Res. Part A Policy Prac.41, 267–279.10.1016/j.tra.2006.05.009
61
WaltonD.ThomasJ. (2005). Naturalistic observations of driver hand positions. Transp. Res. Part F Traffic Psychol Behav.8, 229–238.10.1016/j.trf.2005.04.010
62
YinF.HayashiR.PongsathornR.MasaoN. (2013). “Haptic velocity guidance system by accelerator pedal force control for enhancing eco-driving performance,” in Proceedings of the FISITA 2012 World Automotive Congress (Berlin, Heidelberg), 37–49.
Summary
Keywords
tactile stimulation, haptic technologies, automotive industry, driver safety, survey
Citation
Gaffary Y and Lécuyer A (2018) The Use of Haptic and Tactile Information in the Car to Improve Driving Safety: A Review of Current Technologies. Front. ICT 5:5. doi: 10.3389/fict.2018.00005
Received
23 August 2017
Accepted
09 March 2018
Published
26 March 2018
Volume
5 - 2018
Edited by
Jan B. F. Van Erp, University of Twente, Netherlands
Reviewed by
Rob Gray, Arizona State University, United States; Michiel M. Spapé, Liverpool Hope University, United Kingdom
Updates
Copyright
© 2018 Gaffary and Lécuyer.
This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Yoren Gaffary, yoren.gaffary@inria.fr; Anatole Lécuyer, anatole.lecuyer@inria.fr
Specialty section: This article was submitted to Human-Media Interaction, a section of the journal Frontiers in ICT
Disclaimer
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.