 Mahboubeh Zarei
Mahboubeh Zarei Robin Chhabra
Robin Chhabra- Mechanical and Aerospace Engineering, Carleton University, Ottawa, ON, Canada
Mobility analysis is crucial to fast, safe, and autonomous operation of planetary Wheeled Mobile Robots (WMRs). This paper reviews implemented odometry techniques on currently designed planetary WMRs and surveys methods for improving their mobility and traversability. The methods are categorized based on the employed approaches ranging from signal-based and model-based estimation to terramechanics-based, machine learning, and global sensing techniques. They aim to detect vehicle motion parameters (kinematic states and forces/torques), terrain hazards (slip and sinkage) and terrain parameters (soil cohesion and friction). The limitations of these methods and recommendations for future missions are stated.
1 Introduction
For more than five decades, Wheeled Mobile Robots (WMRs) have been proven essential in space exploration and planetary missions. Traversing a wide range of environments, maneuverability, ability to be directed to special features, and lower weight and power consumption with respect to other platforms are some reasons supporting their increasing popularity. Figure 1 depicts the well-known WMRs in the past, present, and future missions on different extraterrestrial bodies. For a comprehensive bibliography on planetary WMRs the reader is referred to (Sanguino, 2017). The operation of WMRs on planetary bodies requires sophisticated software and hardware solutions for Guidance, Navigation and Control (GNC). This is indeed because of different conditions prevailed on extraterrestrial bodies. The complex and unknown environments, interaction with heterogeneous soil, steep slopes, loose and multi-phase terrains, driving over low gravity regions, harsh lighting conditions, unavailability of GPS signals, power consumption constraints, and computational limitations of embedded systems are critical challenges that must be dealt with when developing GNC modules (Quadrelli et al., 2015). Odometry or knowledge of pose and orientation of the vehicle with respect to some local references is a key component of GNC algorithms. Due to constraints and uncertainties involved, the current planetary WMRs rely on tele-communication with Earth-based stations to perform odometry and plan for safe operation. This ground-in-the-loop operation results in reduced time a vehicle can travel per day on a specific extraterrestrial body. As a result, future planetary missions demand for greater level of technology for localization to enhance the autonomy of roving platforms. In this paper, we first review the implemented odometry solutions on planetary WMRs and highlight their advantages and shortcomings. Then, we proceed with reviewing the solutions that have been proposed to improve the traversability and mobility of the planetary WMRs and aiding the traditional odometry techniques. Here, we have categorized these solutions into five different approaches including signal-based methods, model-based methods that rely on kinematics and estimation theory, terramechanics-based methods, machine learning techniques, and global sensing.

FIGURE 1. Planetary WMR platforms, date, and site of missions.
2 Implemented navigation techniques on planetary WMRs
Odometry is central to every navigation system. It refers to estimating pose and orientation of a vehicle with respect to some reference coordinate frames. Odometry can be performed using proprioceptive sensing (e.g., IMU and encoders) or exteroceptive sensing (e.g. camera and Sun sensor). Therefore, depending on the sensors involved the problem is called Wheel Odometry (WO), Inertial Odometry (IO), or Visual Odometry (VO). The WO uses a kinematic model of the vehicle along with the rotational velocity of the wheels, acquired by the encoders, to estimate pose and orientation. The drift of this method on even and planar terrains is above %10 of the traversed distance (Azkarate Vecilla, 2022). This solution was implemented on Sojourner in Mars Pathfiner mission in 1997 for pose estimation (Matijevic, 1997b). Other Mars rovers of Jet Propulsion Laboratory (JPL) use this type of odometry in combination with other means. The IO uses noisy measurements of inertial sensors and a kinematic model to estimate pose and orientation. The noise level of accelerometers results in 5–10% drifts in estimating pose making the IO ineffective in translational motion. However, it has been used to accurately update the rotational states. Using sensor fusion through Kalman-based filters combined WO and IO was proposed in (Baumgartner et al., 2001; Ali et al., 2005) to ensure the accurate odometry on high-traction terrains for Spirit and Opportunity rovers of Mars Exploration Rover (MER) missions. This technique was also aided by a Sun sensor to provide absolute heading estimations. The VO processes a sequence of onboard camera images for motion estimation. This method is independent of wheel-terrain interactions and provides accurate estimates (1–5% drifts). The rover Curiosity of Mars Science Laboratory (MSL) mission and Perseverance rover of Mars2020 mission combine the previously stated odometry methods with VO (Gong, 2015). The Rosalind Franklin rover of ExoMars mission employs combined VO and IO for its localization (Bora et al., 2017). The VO was also implemented on the Lunar rover Yutu two of Chang’e 4 mission (Wan et al., 2014). The combined WO, IO, and VO can produce estimates with 1–2% of drift (Azkarate Vecilla, 2022). Although VO provides a superior performance for localization, it is computationally expensive which negatively affects power consumption and speed of a WMR. To resolve this problem Field-Programmable Gate Arrays (FPGAs) was proposed as an efficient platform for running VO (Howard et al., 2012). Table 1 summarizes the odometry techniques for planetary WMRs and compares their performance.
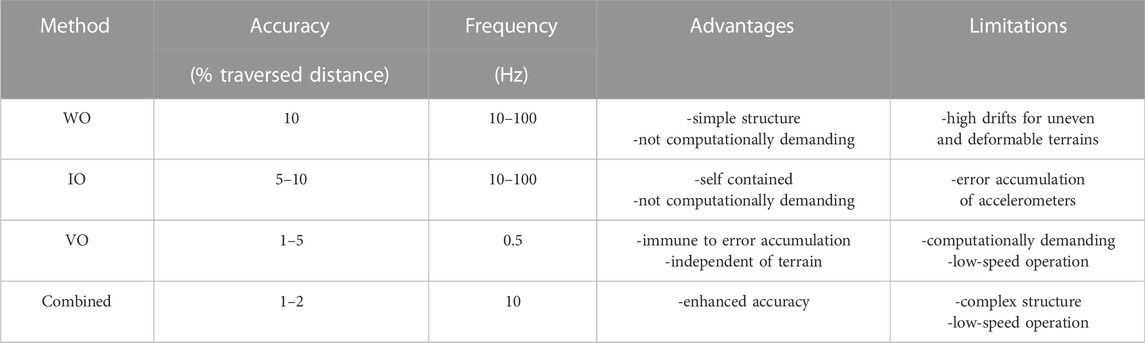
TABLE 1. Comparison of different odometry methods for planetary WMRs.
3 Mobility and traversability enhancement
To increase the operation time, future planetary WMRs require a higher degree of autonomy to perform navigation tasks without relying on high-latency tele-communication with Earth-based stations. However, operation on extraterrestrial bodies is not analogous to Earth operations and involves challenging problems. For instance, driving on soft deformable and non-homogeneous soil, steep slopes, few distinguishable visual features, permanent shaded areas, and processing power constraints on embedded systems are some of these challenges. These problems demand for design of specific algorithms that are capable of predicting traversability for planning safe autonomous operations and improving mobility and odometry on unknown rough terrains. This section surveys dozens of these methodologies.
3.1 Direct signal-based approaches
These approaches use output signals of some sensors to detect abnormal conditions and correct odometry. Hardware redundancy, use of special sensors, frequency analysis, and logic reasoning are some methods in this category. Fuzzy logic and expert rule-based techniques were used in (Ojeda et al., 2004) to compare data from redundant encoders with each other, gyros, and motor currents to detect slip and correct odometry for a six-wheel robot with a rocker-boogie suspension system. However, this technique does not estimate the degree of wheel slip. (Ojeda et al., 2006). proposed a slip estimator for odometry correction in the direction of motion that requires accurate current measurements and some specific terrain parameters. They argue that the terrain parameters can be estimated online either using absolute positions provided by GPS or induced slip in a single wheel for a WMR with at least four driven wheels. The slip detection in Mars rover Curiosity, is done based on motor currents and visual sensors (Arvidson et al., 2017). When abnormal currents are detected the vision system is activated to aid the navigation system with VO. In case features are not unique in the scene, using wheel tracks (Maimone et al., 2007) or steering mast cameras are proposed (Strader et al., 2020). Visual odometry correction on deformable terrains were also proposed in (Reina et al., 2010) using fuzzy reasoning and in (Nagatani et al., 2010) using special telecentric lens. These techniques, however, require high computational cost on embedded processors of planetary WMRs. Thermal cameras are another form of special sensors that were used in (Cunningham et al., 2015) to develop a non-geometrical method for predicting traversability of a terrain through analysing its thermal inertia from infrared imagery. However, long observation periods are required to obtain a good prediction.
3.2 Estimation and kinematics
These methods are based on kinematics models derived from the physics of WMRs and estimation theory tools such as Kalman-based filters. In (Dissanayake et al., 2001), non-holonomic kinematic constraints were used to obtain velocity measurements for aiding the IO within an Extended Kalman Filter (EKF) framework. The method, however, is not applicable on low-traction and uneven terrains of extraterrestrial bodies as the authors modeled slip as a zero-mean noise. Other kinematics-based methods that aim to improve odometry performance were proposed in (Hidalgo-Carrio et al., 2014; Lou et al., 2019). A vision-based method was proposed in (Helmick et al., 2006) which developed a forward kinematics model of rocker–bogie suspension system for a Kalman filter to combine inertial and visual measurements as well as wheel rates and wheel steering angles for slip estimation and compensation. However, permanent shaded regions of Moon, featureless scenes of Mars, and power constrains of WMRs are the main limitations of visual techniques. In (Ward and Iagnemma, 2008) a tire traction model within an EKF framework was incorporated to fuse data of encoders, IMU, and GPS for detecting slip and immobilized conditions. However, GPS signals are not available on extraterrestrial bodies. Although, most research works rely on EKF for estimation, in (Sakai et al., 2009; Reina et al., 2020) two different filters were used. The former proposed a 6-DoF localization solution within an Unscented Kalman Filter (UKF) framework based on the measurements of stereo cameras, an IMU, and wheel encoders. The latter employed a Cubature Kalman Filter (CKF) to estimate terrain properties using vibrations. To reduce odometry error of combined IO and WO, (Kilic et al., 2019), employed non-holonomic constraints and the zero-velocity updates with periodic stops. The autonomous stopping times through estimating and monitoring wheel slip were investigated in (Kilic et al., 2021). However, these methods sacrifice accuracy for traverse rate. In (Malinowski et al., 2022) the effect of integration of predicted slip in WO and VO was investigated using an EKF architecture.
3.3 Terramechanics and dynamics
Terramechanics studies soil properties and wheel-terrain interactions to find normal and shear stresses developed at the contact areas using, e.g., empirical Bekker-Wong models (Bekker, 1969; Wong and Reece, 1967) and their recent modification (Higa et al., 2015). The Mars rover Sojourner performed parameter estimation of Martian soil to identify cohesion and internal friction angle relying on Earth-based analyses (Matijevic, 1997a). However, Earth-in-the-loop procedures are time consuming and inefficient. Online estimation of these parameters were proposed in (Iagnemma et al., 2004) based on simplified terramechanic equations and a least squares technique that identifies the parameters using measurements of the rover configuration sensors, encoders, potentiometers, and six-axis force/torque sensors. The simplified terramechanics-based models were also used in (Ishigami et al., 2007) to deal with longitudinal and lateral slip during steering manoeuvres on deformable soil. However, the accuracy of the estimations is under doubt, since simplified models are not a good representation of real interactions. In (Higa et al., 2016), six-axis force/torque sensors and five types of custom-built contact sensors were used to obtain the three-dimensional stress distribution at the wheel-terrain contact area on lunar regolith simulant. The method, however, for a single wheel results in an error of 1–11%. Real-time estimation of terrain parameters was also addressed in (Li et al., 2018) using semi-empirical terramechanic equations and EKF for WMRs driving on deformable slopes. However, this method is not useful for untraversed areas as it requires a history of measurement data. To measure the terramechanic parameters ahead of the rover, (Zhang W. et al., 2022b), proposed use of an articulated wheeled bevameter equipped with force and vision sensors to predict the slip and sinkage of wheels. An in-situ method for estimating sinkage was given in (Guo et al., 2020) that defines a new reference line of wheel sinkage and simplifies terramechanics into closed-form equations using force/torque sensors. The method is limited to moderate and high-traction terrains.
3.4 Machine learning approaches
These approaches are mainly based on classification or regression techniques to respectively provide discrete or continuous estimates of the quantities of interest. A terrain classifier was trained using vibration signals measured by an accelerometer, which is subject to noise and bias (Brooks and Iagnemma, 2005). The training process was also offline making the method inappropriate for unknown environments. To alleviate its shortcomings, the same authors proposed a self-supervised learning method that predicts the terrain properties using two distinct classifiers (Brooks and Iagnemma, 2012). The Support Vector Machine (SVM) proprioceptive classifier analyzes vibration signals or combination of torques and sinkage to generate labels for training an exteroceptive terrain classifier. The second SVM classifier uses stereo imagery to identify potentially hazardous terrains from a distance. However, this training method is uni-directional where vibration signals are only used to train the visual classifier. To improve the training procedure, (Otsu et al., 2016), proposed a bi-directional training technique where the two classifiers train each other. In the context of slip estimation, Omura and Ishigami (2017) proposed a SVM learning technique based on the measurements of the normal force and contact angle at the wheel-terrain interaction area to generate correlation labels for the slip and classify wheel slip into three levels: non-stuck, quasi-stuck, and stuck. (Gonzalez et al., 2018a). compared the performance of supervised (artificial neural networks and SVM) and unsupervised (self organizing map and k-means) classification techniques in detection of three discrete levels for longitudinal slip (low, moderate, and high) based on the measurements of IMU, encoders, and motor currents. A vision-based classification method was proposed in Endo et al. (2021) to predict wheel slip via estimating terrain slopes. The computational cost of image processing limits the use of visual approaches. Deep learning techniques were also proposed for proprioceptive terrain classification based on the measurements of motion states and wheel forces/torques (Vulpi et al., 2020). At best its error is around 8.6%. The main limitation of these methods is that slip cannot be estimated in a continuous manner and the outputs are only useful to avoid hazardous terrains. In (Angelova et al., 2007), continuous slip was predicted from a distance based on visual data and non-linear regression models that correlates terrain appearance and geometry with slip. The applicability of the method is under doubt since, it uses visual sensors and it has some difficulties to determine the terrain types. In (Gonzalez et al., 2018b) Gaussian Process Regression (GPR) is used to predict continuous slip and its variance based on the measurements of IMU and motor torques. However, the computational effort of GPR is high as it uses the history of features to perform its predictions. The GPR was also employed on China’s Mars rover Zhurong to estimate the average of longitudinal and lateral slip using the measurements of IMU, encoders, and motor currents (Zhang T. et al., 2022a).
3.5 Global sensing
Global localization solutions are incorporated to bypass limitations of the odometry and correct its position drifts. A tele-communication link between Mars orbiter Odyssey and MER platforms enabled the navigation system to obtain position accuracy of about 10 m around 3 days (Guinn, 2001). Skyline signature matching between images captured by a WMR and a global map was proposed in (Chiodini et al., 2017) to initialize the vehicle position after landing on Mars. (Matthies et al., 2022). proposed an onboard global localization technique which involves mapping Lunar craters from orbit and then using stereo cameras or LiDAR for detecting the craters landmarks. The accuracy of this method depends on the resolution of global maps. Learning algorithms such as Siamese Neural Networks were proposed for global localization on Mars and Moon respectively in (i Caireta, 2021) and (Wu et al., 2019).
3.6 Summary and potential future directions
Table 2 summarizes the methodologies discussed throughout this section and indicates their potential applications for improving mobility and traversability of planetary WMRs. The level of feasibility of these solutions leaves plenty of room for improvement. One major problem is computational limitations of embedded systems within these robots, and future research must be directed toward developing computationally efficient software solutions on available hardware. Distributed sensing, either sensor-level or track-level fusion, can be used in the estimation architecture to enhance its performance. To achieve greater level of autonomy, the prospective learning solutions should be designed based on multi-directional communicating training techniques. Novel terramechanics models based on updated information on planetary surfaces (e.g., soil composition, surface geometry) are needed to simultaneously enhance fidelity and efficiency of the traditional models. Fast and robust vision-based algorithms must be developed to detect and match features in harsh lighting conditions and featureless environments of extraterrestrial bodies. Another prospective solution is combining different approaches, reviewed in this section, to design robust systems for high-speed navigation of future planetary WMRs.
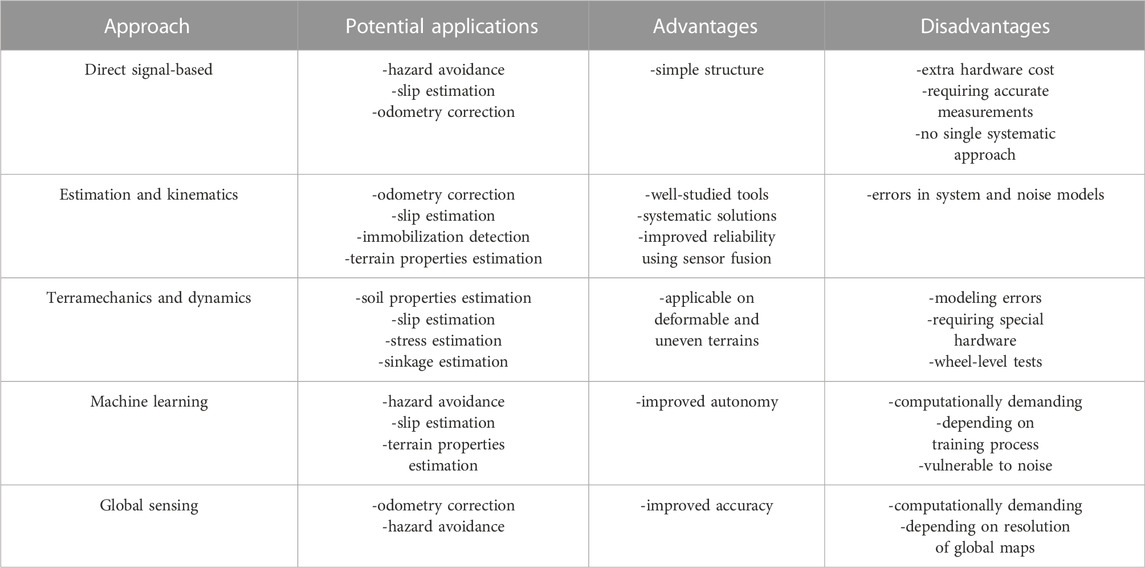
TABLE 2. Summary of mobility and traversability enhancement methodologies for planetary WMRs.
4 Conclusion
This paper surveyed dozens of methodologies for mobility analysis and mission planing of planetary WMRs. The performance of the currently implemented odometry methods was compared and potential solutions for improvement of these methods were discussed. Further research is still demanded to improve the practicality and performance of the proposed methods. Future research should be directed toward reducing computational burdens on embedded systems, use of distributed estimation and multi-directional learning techniques, developing terramechanics models for planetary interfaces, and designing fast and robust vision-based algorithms for high-speed operation of planetary WMRs.
Author contributions
MZ is the main contributor to the research and RC is the PI who supervised the study.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Ali, K. S., Vanelli, C. A., Biesiadecki, J. J., Maimone, M. W., Cheng, Y., San Martin, A. M., et al. (2005). “Attitude and position estimation on the Mars exploration rovers,” in IEEE International Conference on Systems, Man and Cybernetics (IEEE), 20–27.
Angelova, A., Matthies, L., Helmick, D., and Perona, P. (2007). Learning and prediction of slip from visual information. J. Field Robot. 24, 205–231. doi:10.1002/rob.20179
Arvidson, R. E., Iagnemma, K. D., Maimone, M., Fraeman, A. A., Zhou, F., Heverly, M. C., et al. (2017). Mars Science Laboratory curiosity rover megaripple crossings up to sol 710 in gale crater. J. Field Robot. 34, 495–518. doi:10.1002/rob.21647
Azkarate Vecilla, M. (2022). “Autonomous navigation of planetary rovers,” (Málaga, Málaga, Spain: University of Malaga). Ph.D. thesis.
Baumgartner, E. T., Aghazarian, H., and Trebi-Ollennu, A. (2001). Rover localization results for the fido rover, Sens. Fusion Decentralized Control Robotic Syst. IV. 4571. 34–44.
Bekker, M. G. (1969). Introduction to terrain-vehicle systems. part i: The terrain. part ii: The vehicle. Tech. rep. Michigan: Univ Ann Arbor.
Bora, L., Nye, B., Lancaster, R., Barclay, C., and Winter, M. (2017). “Exomars rover control, localisation and path planning in an hazardous and high disturbance environment,” in 14th symposium on advanced space Technologies in robotics and automation (Leiden, Netherlands: ASTRA). 20–22.
Brooks, C. A., and Iagnemma, K. (2012). Self-supervised terrain classification for planetary surface exploration rovers. J. Field Robot. 29, 445–468. doi:10.1002/rob.21408
Brooks, C. A., and Iagnemma, K. (2005). Vibration-based terrain classification for planetary exploration rovers. IEEE Trans. Robot. 21, 1185–1191. doi:10.1109/tro.2005.855994
Chiodini, S., Pertile, M., Debei, S., Bramante, L., Ferrentino, E., Villa, A. G., et al. (2017). “Mars rovers localization by matching local horizon to surface digital elevation models,” in 2017 IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace) (IEEE), 374–379.
Cunningham, C., Nesnas, I., and Whittaker, W. L. (2015). Terrain traversability prediction by imaging thermal transients. In 2015IEEE International Conference on Robotics and Automation (ICRA) (IEEE), 3947–3952.
Dissanayake, G., Sukkarieh, S., Nebot, E., and Durrant-Whyte, H. (2001). The aiding of a low-cost strapdown inertial measurement unit using vehicle model constraints for land vehicle applications. IEEE Trans. Rob. Autom. 17, 731–747. doi:10.1109/70.964672
Endo, M., Endo, S., Nagaoka, K., and Yoshida, K. (2021). Terrain-dependent slip risk prediction for planetary exploration rovers. Robotica 39, 1883–1896. doi:10.1017/s0263574721000035
Gong, W. (2015). Discussions on localization capabilities of msl and mer rovers. Ann. GIS 21, 69–79. doi:10.1080/19475683.2014.992367
Gonzalez, R., Apostolopoulos, D., and Iagnemma, K. (2018a). Slippage and immobilization detection for planetary exploration rovers via machine learning and proprioceptive sensing. J. Field Robotics 35, 231–247. doi:10.1002/rob.21736
Gonzalez, R., Fiacchini, M., and Iagnemma, K. (2018b). Slippage prediction for off-road mobile robots via machine learning regression and proprioceptive sensing. Robotics Aut. Syst. 105, 85–93. doi:10.1016/j.robot.2018.03.013
Guinn, J. R. (2001). “Mars surface asset positioning using in-situ radio tracking,” in Proceedings AAS/AIAA Space Flight Mechanics Meeting (Santa Barbara, CA: AIAA), 45–54.
Guo, J., Guo, T., Zhong, M., Gao, H., Huang, B., Ding, L., et al. (2020). In-situ evaluation of terrain mechanical parameters and wheel-terrain interactions using wheel-terrain contact mechanics for wheeled planetary rovers. Mech. Mach. Theory 145, 103696. doi:10.1016/j.mechmachtheory.2019.103696
Helmick, D. M., Roumeliotis, S. I., Cheng, Y., Clouse, D. S., Bajracharya, M., and Matthies, L. H. (2006). Slip-compensated path following for planetary exploration rovers. Adv. Robot. 20, 1257–1280. doi:10.1163/156855306778792470
Hidalgo-Carrio, J., Babu, A., and Kirchner, F. (2014). Static forces weighted jacobian motion models for improved odometry, In Proceeding of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IEEE), 169–75.
Higa, S., Nagaoka, K., Nagatani, K., and Yoshida, K. (2015). Measurement and modeling for two-dimensional normal stress distribution of wheel on loose soil. J. Terramechanics 62, 63–73. doi:10.1016/j.jterra.2015.04.001
Higa, S., Sawada, K., Teruya, K., Nagaoka, K., and Yoshida, K. (2016). “Three-dimensional stress distribution of a rigid wheel on lunar regolith simulant. in Proceedings of the 13th International Symposium on Artificial Intelligence (Beijing, China: Robotics and Automation in Space). S-9a-3.
Howard, T. M., Morfopoulos, A., Morrison, J., Kuwata, Y., Villalpando, C., Matthies, L., et al. (2012). “Enabling continuous planetary rover navigation through fpga stereo and visual odometry,” in IEEE Aerospace Conference (IEEE). 1–9.
i Caireta, I. M. (2021). “Improving global localization algorithms for mars rovers with neural networks,” (Aalborg, Denmark: Aalborg University). Master’s thesis.
Iagnemma, K., Kang, S., Shibly, H., and Dubowsky, S. (2004). Online terrain parameter estimation for wheeled mobile robots with application to planetary rovers. IEEE Trans. Robot. 20, 921–927. doi:10.1109/tro.2004.829462
Ishigami, G., Miwa, A., Nagatani, K., and Yoshida, K. (2007). Terramechanics-based model for steering maneuver of planetary exploration rovers on loose soil. J. Field Robot. 24, 233–250. doi:10.1002/rob.20187
Kilic, C., Gross, J. N., Ohi, N., Watson, R., Strader, J., Swiger, T., et al. (2019). “Improved planetary rover inertial navigation and wheel odometry performance through periodic use of zero-type constraints,” in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE), 552–559.
Kilic, C., Ohi, N., Gu, Y., and Gross, J. N. (2021). Slip-based autonomous zupt through Gaussian process to improve planetary rover localization. IEEE Robot. Autom. Lett. 6, 4782–4789. doi:10.1109/lra.2021.3068893
Li, Y., Ding, L., Zheng, Z., Yang, Q., Zhao, X., and Liu, G. (2018). A multi-mode real-time terrain parameter estimation method for wheeled motion control of mobile robots. Mech. Syst. Signal Process. 104, 758–775. doi:10.1016/j.ymssp.2017.11.038
Lou, Q., González, F., and Kövecses, J. (2019). Kinematic modeling and state estimation of exploration rovers. IEEE Robot. Autom. Lett. 4, 1311–1318. doi:10.1109/lra.2019.2895393
Maimone, M., Cheng, Y., and Matthies, L. (2007). Two years of visual odometry on the Mars exploration rovers. J. Field Robot. 24, 169–186. doi:10.1002/rob.20184
Malinowski, M. T., Richards, A., and Woods, M. (2022). “Wheel slip prediction for improved rover localization,” in AIAA SCITECH 2022 forum, 1080.
Matijevic, J. (1997a). Characterization of martian surface deposit by the Mars pathfinder rover, sojourner. Science 278, 237–242.
Matijevic, J. (1997b). Sojourner the Mars pathfinder microrover flight experiment. Space Technol. 17, 143–149. doi:10.1016/s0892-9270(97)00032-8
Matthies, L., Daftry, S., Tepsuporn, S., Cheng, Y., Atha, D., Swan, R. M., et al. (2022). Lunar rover localization using craters as landmarks. Available at: http://arXiv/abs/2203.10073.
Nagatani, K., Ikeda, A., Ishigami, G., Yoshida, K., and Nagai, I. (2010). Development of a visual odometry system for a wheeled robot on loose soil using a telecentric camera. Adv. Robot. 24, 1149–1167. doi:10.1163/016918610x501282
Ojeda, L., Cruz, D., Reina, G., and Borenstein, J. (2006). Current-based slippage detection and odometry correction for mobile robots and planetary rovers. IEEE Trans. Robot. 22, 366–378. doi:10.1109/tro.2005.862480
Ojeda, L., Reina, G., and Borenstein, J. (2004). “Experimental results from flexnav: An expert rule-based dead-reckoning system for Mars rovers,” in IEEE Aerospace Conference Proceedings (IEEE Cat. No. 04TH8720) (IEEE), 816–825.
Omura, T., and Ishigami, G. (2017). Wheel slip classification method for mobile robot in sandy terrain using in-wheel sensor. J. Robot. Mechatron. 29, 902–910. doi:10.20965/jrm.2017.p0902
Otsu, K., Ono, M., Fuchs, T. J., Baldwin, I., and Kubota, T. (2016). Autonomous terrain classification with co-and self-training approach. IEEE Robot. Autom. Lett. 1, 814–819. doi:10.1109/lra.2016.2525040
Quadrelli, M. B., Wood, L. J., Riedel, J. E., McHenry, M. C., Aung, M., Cangahuala, L. A., et al. (2015). Guidance, navigation, and control technology assessment for future planetary science missions. J. Guid. Control, Dyn. 38, 1165–1186. doi:10.2514/1.g000525
Reina, G., Ishigami, G., Nagatani, K., and Yoshida, K. (2010). Odometry correction using visual slip angle estimation for planetary exploration rovers. Adv. Robot. 24, 359–385. doi:10.1163/016918609x12619993300548
Reina, G., Leanza, A., and Messina, A. (2020). Terrain estimation via vehicle vibration measurement and cubature kalman filtering. J. Vib. Control 26, 885–898. doi:10.1177/1077546319890011
Sakai, A., Tamura, Y., and Kuroda, Y. (2009). An efficient solution to 6dof localization using unscented kalman filter for planetary rovers. In Proceeding of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IEEE), 4154.
Sanguino, T. d. J. M. (2017). 50 years of rovers for planetary exploration: A retrospective review for future directions. Robotics Aut. Syst. 94, 172–185. doi:10.1016/j.robot.2017.04.020
Strader, J., Otsu, K., and Agha-mohammadi, A.-a. (2020). Perception-aware autonomous mast motion planning for planetary exploration rovers. J. Field Robotics 37, 812–829. doi:10.1002/rob.21925
Vulpi, F., Milella, A., Cordes, F., Dominguez, R., and Reina, G. (2020). “Deep terrain estimation for planetary rovers,” in 15th International Symposium on Artificial Intelligence, Robotics and Automation in Space. ISAIRAS-2020.
Wan, W., Liu, Z., Di, K., Wang, B., and Zhou, J. (2014). A cross-site visual localization method for yutu rover. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 40, 279–284. doi:10.5194/isprsarchives-xl-4-279-2014
Ward, C. C., and Iagnemma, K. (2008). A dynamic-model-based wheel slip detector for mobile robots on outdoor terrain. IEEE Trans. Robot. 24, 821–831. doi:10.1109/tro.2008.924945
Wong, J.-Y., and Reece, A. (1967). Prediction of rigid wheel performance based on the analysis of soil-wheel stresses: Part ii. performance of towed rigid wheels. J. Terramechanics 4, 7–25. doi:10.1016/0022-4898(67)90047-x
Wu, B., Wk, P. R., Ludivig, P., Chung, A. S., and Seabrook, T. (2019). “Absolute localization through orbital maps and surface perspective imagery: A synthetic lunar dataset and neural network approach,” in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE), 3262–3267.
Zhang, T., Peng, S., Jia, Y., Sun, J., Tian, H., and Yan, C. (2022a). Slip estimation model for planetary rover using Gaussian process regression. Appl. Sci. 12, 4789. doi:10.3390/app12094789
Keywords: planetary wheeled mobile robots, odometry, slip and sinkage estimation, terrain classification, terramechanics
Citation: Zarei M and Chhabra R (2022) Advancements in autonomous mobility of planetary wheeled mobile robots: A review. Front. Space Technol. 3:1080291. doi: 10.3389/frspt.2022.1080291
Received: 26 October 2022; Accepted: 30 November 2022;
Published: 15 December 2022.
Edited by:
M. Reza Emami, University of Toronto, CanadaReviewed by:
Chengchao Bai, Harbin Institute of Technology, ChinaCopyright © 2022 Zarei and Chhabra. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Robin Chhabra, cm9iaW4uY2hoYWJyYUBjYXJsZXRvbi5jYQ==