 Mikhail D. Alexandrov
Mikhail D. Alexandrov Bastiaan Van Diedenhoven
Bastiaan Van Diedenhoven Brian Cairns
Brian Cairns Andrzej P. Wasilewski4
Andrzej P. Wasilewski4- 1Department of Applied Physics and Applied Mathematics, Columbia University, New York, NY, United States
- 2NASA Goddard Institute for Space Studies, New York, NY, United States
- 3Space Research Organisation Netherlands, Leiden, Netherlands
- 4Autonomic Integra LLC, New York, NY, United States
In Part II of the series we present results of application of our recently developed tomographic technique to real measurements made by the Research Scanning Polarimeter (RSP). This instrument served as a prototype for the Aerosol Polarimetery Sensor launched on-board the NASA Glory satellite. The retrieval algorithms developed for the Research Scanning Polarimeter were adopted for analysis of the measurements by the space-borne polarimeters on the recently launched NASA's Plankton, Aerosol, Cloud Ocean Ecosystem (PACE) satellite. The RSP is an airborne along-track scanner with uniquely high angular resolution and high frequency of measurements. Besides characterization of liquid-water cloud droplet sizes the RSP observations also provide for derivation of 2D fields of extinction coefficient inside the cloud using a tomographic technique described in Part I of the series. This technique utilizes the family of cloud shapes derived using “cutout” method, which can be interpreted as level curves of an abstract “reflectance density”. The latter is then used for derivation of the directional cloud optical thickness (dCOT) tomogram, a collection of dCOTs is parameterized by the angles and offsets of the view rays (chords). After this, the inverse Radon Transform (the mathematical basis of the X-ray computed tomography) is applied to the dCOT tomogram yielding 2D spatial distribution of the extinction coefficient. The later can be converted into droplet number concentration using the droplet size profiles derived from the RSP’s polarized reflectance measurements. After successful tests on synthetic data, this technique was applied to real RSP measurements from NASA’s Cloud, Aerosol and Monsoon Processes Philippines Experiment (
1 Introduction
Cloud tomography is a common name for a number of remote sensing techniques aiming to estimate the structure of cloud interior from optical measurements made outside the cloud. The typical outputs of such algorithms are 2D or 3D fields of droplet extinction coefficients and number concentrations. Such information is usually provided by in situ measurements made inside cloud. Tomographic retrievals, while being less accurate, can complement localized in situ measurements (when available) by yielding the instant microphysical structure of the cloud as a whole.
The cloud tomography algorithm used in this study was introduced by Alexandrov et al. (2021) hereinafter referred to as Part I. In this study we demonstrate the performance of this algorithm on real measurements made by the Research Scanning Polarimeter (RSP).
Tomography (from Greek word
In Part I of this series we presented a new algorithm for inversion of the internal cloud structure which, while relying on passive optical measurements, is closer to the original tomography as it is based on Radon transform rather than LSF techniques. Passive measurements cannot be used directly for the construction of a proper tomogram, defined as the directional cloud optical thickness (dCOT) as a function of angle and offset of the viewing ray. However, such measurements allow for estimation of the tomogram using a certain heuristic approach that does not require 3D RT computations. This approach utilizes the family of cloud shapes derived using “cutout” technique (Alexandrov et al., 2016a) and corresponding to a number of thresholds in measured total reflectance used to separate bright cloud from its darker background. These shapes can be interpreted as level curves of an abstract “reflectance density”, which is then used for deriving the dCOT tomogram based on a proxy formula relating reflectance to dCOT. Once the tomogram is constructed, inverse Radon transform is applied to it yielding a 2D field of the extinction coefficient. This extinction field is defined up to an unknown constant factor and, thus, requires calibration using independent measurements.
The described tomographic retrieval algorithm was designed for application to the Research Scanning Polarimeter measurements, while it can be adapted to data from other similar sensors. The RSP (Cairns et al., 1999) is an airborne high-resolution along-track scanner which provides a sufficient number of view rays at relevant spatial resolution to constrain cloud shapes (Alexandrov et al., 2016a). Other RSP retrieval products are described in the next section.
The new tomographic technique was refined and validated in Part I using a synthetic dataset composed of simulated RSP measurements generated by the 3D radiative transfer (RT) model called “Monte Carlo code for the phYSically correct Tracing of photons In Cloudy atmospheres” (MYSTIC (Mayer, 2009; Emde et al., 2010)). This model was applied to a LES dataset with 100-m horizontal and 40-m vertical resolution representing a shallow maritime convection cloud field. The tomographic retrievals of the extinction coefficient from this dataset appeared to be unbiased in value while having the standard deviation of the difference with the LES values
In this paper we present the results of application of our tomographic retrieval algorithm to real RSP measurements made during NASA’s Cloud, Aerosol and Monsoon Processes Philippines Experiment (
2 The RSP measurements and retrievals
The RSP served as a prototype for the satellite Aerosol Polarimetery Sensor (APS) built for the NASA Glory Project (Mishchenko, 2006; Mishchenko et al., 2007). The cloud retrieval algorithms developed for the RSP were recently adopted for use with the measurements of the spaceborne polarimeters on the Plankton, Aerosol, Cloud Ocean Ecosystem (PACE) satellite mission (Werdell and Coauthors, 2019). During the past decades the RSP has been deployed during numerous NASA field campaigns (see, e.g., Alexandrov et al., 2015; Alexandrov et al.,2016a; Alexandrov et al.,2016b; Sinclair et al., 2017; Alexandrov et al., 2018; Sinclair et al., 2019).
The field of view of the RSP is 14 mrad while measurements are made along track at 0.8
The RSP’s measurements of total and polarized reflectances in 9 spectral channels are used for a number of different kinds of retrievals. The corresponding measurement geometries and the view-line aggregation schemes are presented in Figure 1. The RSP’s polarized reflectance measurements in the rainbow (cloud bow) scattering range (135
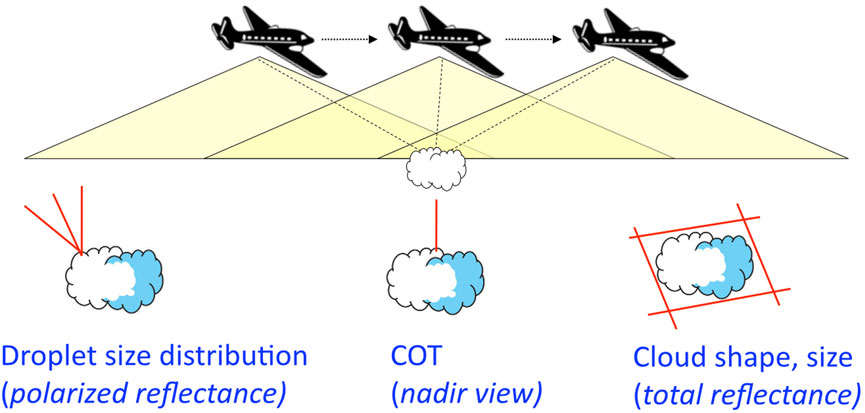
Figure 1. Schematic representation of the RSP’s measurement geometry (top) and the view-line aggregations used for different types of retrievals (bottom). This figure is reproduced from Part I.
The operational algorithm for retrieval of COT from RSP-measured total reflectances at nadir view is a modification of the legacy bi-spectral technique (Nakajima and King, 1990). In the RSP algorithm no absorbing spectral channels are used, while the droplet effective radius is retrieved from the polarized reflectance (Alexandrov et al., 2012a). It is then used to derive the COT value from the look-up table (LUT) computed for non-absorbing 863-nm channel. This LUT is based on plain-parallel radiative transfer computations, thus, the retrieved COT can be biased low in the presence of 3D radiative effects (such as light escape from broken cloud’s sides or shadowing at low sun angles). A correction technique for such biases has been recently suggested by Alexandrov et al. (2024) and Alexandrov et al. (2025). In addition to this, the cloud top heights (CTH) are derived from the RSP data using a stereo block-correlation algorithm (Sinclair et al., 2017).
3 Radon transform
In Part I and in this study we use the implementation of Radon transform from the standard Interactive Data Language (IDL v.8.4) library (RADON function) with the ramp filter added. The geometric setup of the method is schematically shown in Figure 2 (left), while more detailed description can be found in Part I. The 2D field to be determined is the spatial distribution of the cloud extinction coefficient
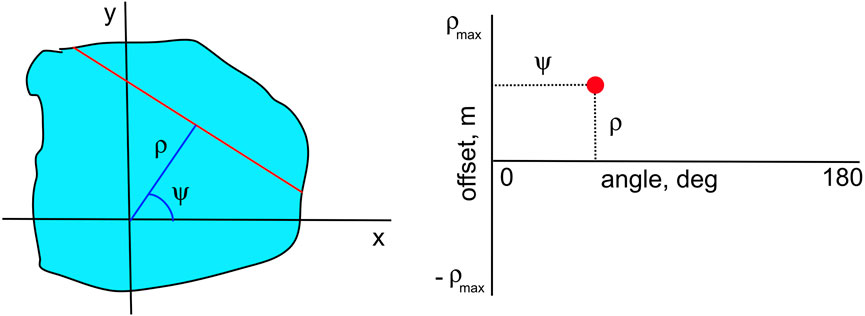
Figure 2. Radon transform geometry: Left: in the physical space the extinction coefficient (light blue) is integrated along the chord (red) parameterized by the angle
In Part I we tested the performance of the IDL RADON function by applying it to a synthetic distribution
4 Examples from CAMP2Ex dataset
The NASA Cloud, Aerosol and Monsoon Processes Philippines Experiment (
We will demonstrate performance of our tomographic algorithm on two examples from
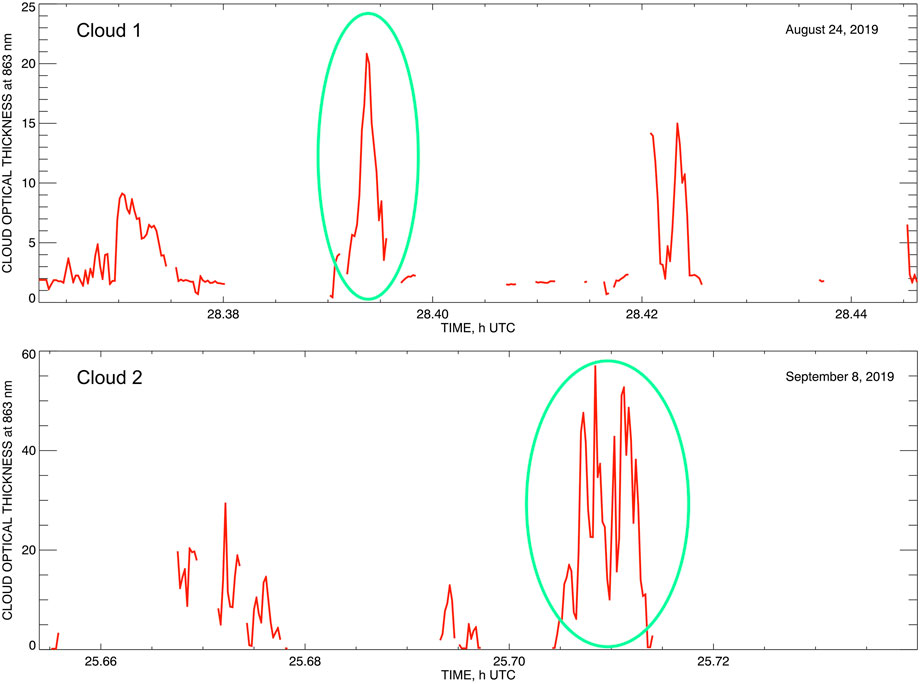
Figure 3. The COT time series derived from the RSP measurements. The two clouds used as examples in this study are singled out by green ellipses. Top: Cu cloud observed on 25 August 2019 between 04:23 and 04:24 UTC. Bottom: CuCg (Tcu) cloud observed on 9 September 2019 between 01:42 and 01:43 UTC. Note that the data in these plots are conventionally labeled by the dates of the flights’ departures (August 24 and September 8 respectively), thus, making the time stamps to run well over 24 h.
4.1 Cloud shapes
We use the “cutout” technique introduced by Alexandrov et al. (2016a) to derive 2D cloud shapes from the RSP measurements (an alternative name used for similar techniques in literature is “space carving” (e.g., Lee et al., 2018; Levis et al., 2020)). This technique uses 1D angular cloud masks constructed for each RSP scan. Choosing a cloud/clear-separation threshold
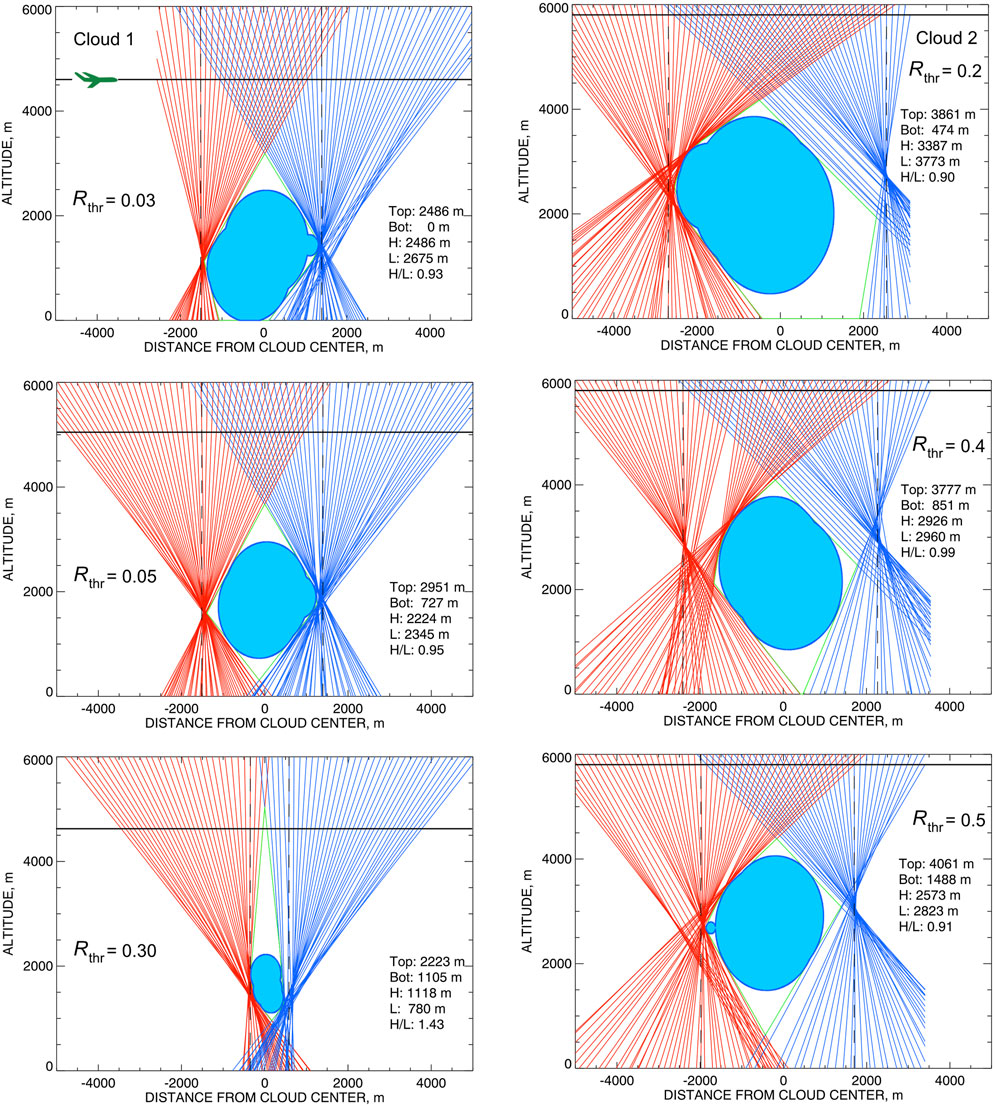
Figure 4. Derivation of the cloud shapes corresponding to various reflectance thresholds
Cloud shapes derived in such manner are not as universal as those of solid objects: they depend on the brightness thresholds
Figure 4 presents the cloud shapes (and view lines used for their construction) for Cloud 1 (left) and Cloud 2 (right). Plots in each column represent three different reflectance thresholds. Note that the ranges of these thresholds used for the two clouds are quite different: 0.03, 0.05, and 0.3 for Cloud 1 and 0.2, 0.4, and 0.5 for Cloud 2, which appears to be substantially brighter.
Figure 5 (top) shows families of cloud shapes corresponding to a number of
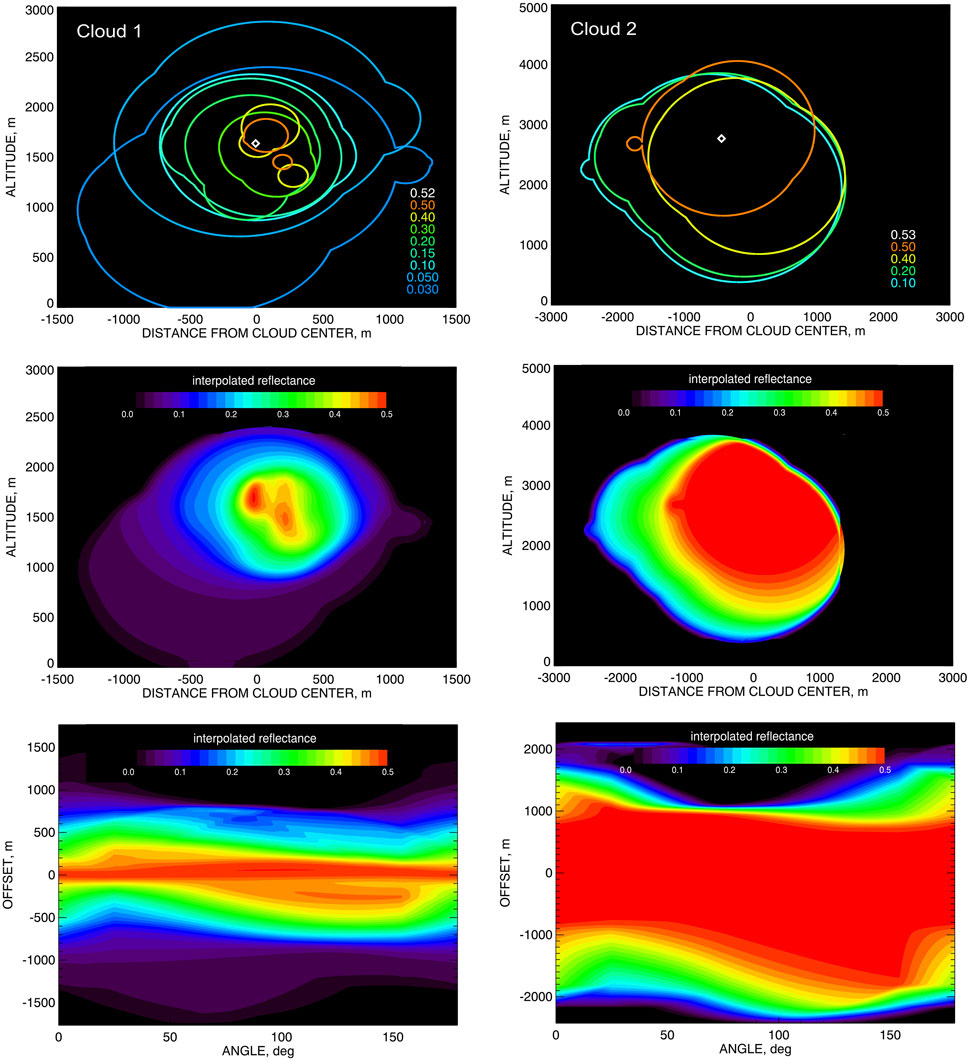
Figure 5. Top: The nested families of cloud shapes corresponding to a number of different reflectance thresholds, the maximal observed reflectance values are assigned to the point at the cloud’s center (depicted by white diamond). Middle: The abstract reflectance-proxy distributions (RPD) computed by interpolation between the curves in the top plots assuming that each point of each curve is assigned the value equal to the corresponding brightness threshold
4.2 Reflectance-proxy distribution and its tomogram
The reflectance values
The RP values at the points belonging to the curves in Figure 5 (top) are then interpolated to points in-between the curves, thus, creating the full RPD in the 2D domain bounded by the shape curve with the lowest
The RPD is a supporting construction allowing for interpolation of the reflectances observed at the actual view rays to all possible view rays (chords) from a high-resolution grid of angles
4.3 dCOT tomogram
Construction of the RP tomogram is the most computationally expensive step of our analysis. Ones the RP tomogram is obtained, it can be easily converted into dCOT tomogram using a proxy formula, which was introduced and validated using synthetic data in Part I. In this study we use a simplified version of this relationship between the dCOT tomogram
which does not include the chord-length-tomogram factor. The latter is helpful in the cases of more complicated cloud shapes (e.g., column-like as in Part I), while for the clouds analyzed in this study it does not make any notable difference. The parameter
The dCOT tomograms for the Clouds 1 and 2 are presented in Figure 6 (top). The value scales in these plots are arbitrary since the inverse Radon transform of a dCOT tomogram is defined up to an arbitrary constant factor, so the dCOT tomogram itself can be also defined up to such a factor (thus, no color bars are shown).
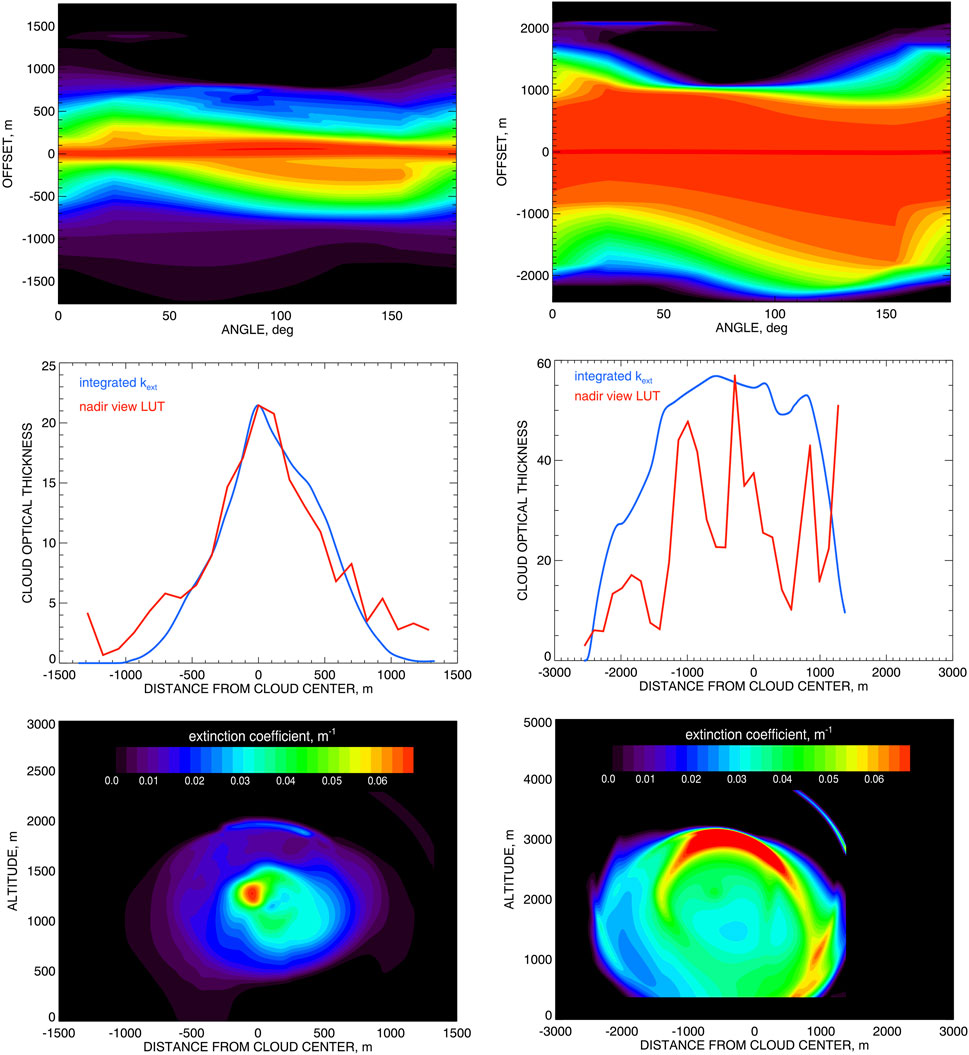
Figure 6. Top: The dCOT tomograms
dCOT tomogram can be used to define the “optical aspect ratio” of the cloud as
It provides a single number independent of cloud shape corresponding to a specific reflectance threshold. These cloud shapes may have different aspect ratios as can be seen in Figure 4. For Cloud 1
4.4 Extinction coefficient density and its calibration
The initial extinction coefficient densities (extinction distributions) in both cases were computed by application of inverse Radon transform to the dCOT tomograms presented in Figure 6 (top). However, as we mentioned above, these distributions are defined up to an arbitrary constant factors and need to be calibrated. The calibration factor in each case has to be determined from an additional retrieved parameter. The most obvious candidate for such parameter is the COT derived from the RSP’s nadir reflectances using the standard operational procedure based on 1D-RT-computed LUT (see Section 2). The calibration procedure is illustrated in Figure 6 (middle). In these panels the COTs derived using the RSP’s nadir-view measurements are shown in red. The blue curves there depict the COTs computed by integration of the initial backprojected
The problem with this calibration algorithm is in the bias of COT retrievals for isolated cloud in the presence of 3D radiative effects. Alexandrov et al. (2024) demonstrated using 3D RT simulations that COT retrievals made assuming a plane-parallel geometry can underestimate the actual values by a factor of four or even larger. This bias is primarily caused by leaking of scattered radiation through the cloud’s sides, which is not accounted for in LUT based on 1D RT computations. Alexandrov et al. (2024) suggested a simple linear formula for correction of the retrieved COT:
Here
where
For moderate COT values
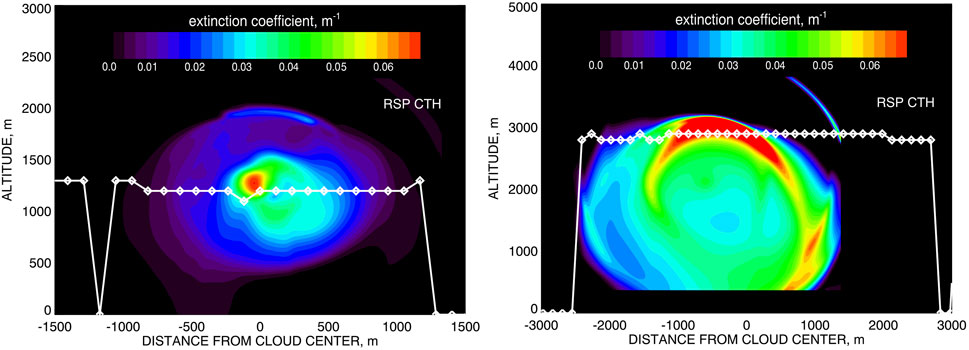
Figure 7. Same as Figure 6 (bottom) but with the RSP-derived cloud top heights (CTH) over-plotted in white. Left: Cloud 1 case from August 25; Right: Cloud 2 case from September 9.
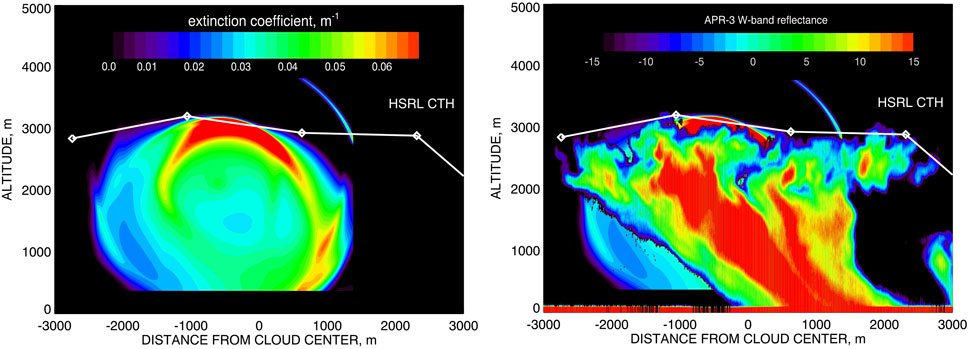
Figure 8. The extinction coefficient distribution in Cloud 2 case (Figure 6 (bottom right)) with over imposed cloud top height derived from HSRL-2 lidar data (left) and W-band reflectance field derived from APR-3 radar measurements (right).
4.5 Cloud top heights and comparison with other instruments
As we mentioned in Section 2, the RSP data processing includes an independent stereo block-correlation algorithm (Sinclair et al., 2017) for determination of cloud top heights (CTH). The results obtained using this algorithm are presented in Figure 7 as white lines plotted over the extinction densities from Figure 6 (bottom). We see a better agreement in CTH for Cloud 2 (right plot) probably because it is larger and optically denser (so our COT-based tomography is more robust).
CTH values are also available from the correlative lidar measurements made by HSRL-2 (Collow et al., 2022; Edwards et al., 2022; Christopoulos et al., 2025). These measurements were not available in the Cloud 1 case, while the results for Cloud 2 are presented in Figure 8 (left) being plotted over the extinction coefficient distribution from Figure 6 (bottom right). In Figure 8 (right) the W-band reflectance field derived from APR-3 radar measurements is also plotted over our extinction distribution. Good agreements (say, within 50 m) in CTH values can bee seen for all three instruments, except for the utmost right part of the plots where our tomographic retrievals cut the cloud’s shape short. Similar discrepancy is present also in Figure 7 (right). The high-resolution radar reflectance field from Figure 8 (right) can provide a possible explanation of this artifact. It shows that at 1,000 m from the center of the cloud it becomes physically (and therefore optically) thin, so while still visible in lidar and radar data (as well as in correlation-based RSP CTH), this part of the cloud was not detected by the dCOT-based tomography.
5 Conclusion
We presented examples of tomographic analyzes of real clouds observed by the RSP during NASA’s
The original tomographic algorithm based on Radon transform and involving collection of cloud shapes corresponding to a number of brightness thresholds was described and validated in Part I of the series. In this study we resolved the issue with calibration of the derived 2D extinction density using the COT renormalization procedure introduced by Alexandrov et al. (2024).
Applicability of our tomographic algorithm to a specific cloud type depends on the cloud geometry that should allow for construction of cloud shapes using tangent view rays (see Section 4.1). The RSP measurements lack near-horizontal view rays, thus, constraining of cloud shape should not significantly rely on them. This means that our technique provides the best results either for “round”clouds (with aspect ratio close to one, e.g., Cu) and those having column-like shape (with higher aspect ratio, e.g., CuCg). Currently the clouds suitable for analysis are selected manually, however some crude preliminary cloud shape characterization may be developed in the future to make cloud selection more automated.
We demonstrated step-by-step performance of our tomographic algorithm on two examples from
In our future work we plan to follow the framework of Part I and use the RSP’s polarimetric retrievals of droplet size distribution parameters to convert the extinction coefficients into droplet number concentrations. The latter will then be compared with in situ measurements made in the vicinity of our clouds. We also plan to further refine our algorithm and to consider more examples.
The tomographic algorithm described in this article relies on multi-angle measurements that are used to constrain cloud shapes. This means that it is applicable mostly to data from along-track scanners such as RSP and APS, as well as the proposed multispectral Scanning Polarimeter (ScanPol) (Milinevsky et al., 2019) and particulate observing scanning polarimeter (POSP) (Zhu et al., 2020). The most of imaging instruments make measurements at a single angle (usually at nadir), thus their data cannot be used as input for the tomographic technique presented in this study. The exception is the Hyper-Angular Rainbow Polarimeter (HARP) family of instruments, which have combined imaging and multi-angle capabilities. This family includes airborne AirHARP (McBride et al., 2024) and HARP-2 (Sienkiewicz et al., 2025) currently deployed on PACE satellite platform.
We currently work on a simplified parametric tomographic technique based on certain assumptions about cloud shape and extinction coefficient distribution. This technique does not require multiple view angles and can be applied to nadir-view measurements (including those from imagers). It is entirely analytical, thus, has computational efficiency sufficient for processing satellite data in real time. We plan to apply this technique to data from Ocean Color Imager (OCI) onboard PACE satellite.
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Author contributions
MA: Writing – original draft, Investigation, Software, Conceptualization, Writing – review and editing, Methodology. BVD: Writing – review and editing, Methodology, Funding acquisition, Resources, Data curation. BC: Resources, Data curation, Supervision, Methodology, Writing – review and editing, Funding acquisition. AW: Data curation, Software, Writing – review and editing.
Funding
The author(s) declare that financial support was received for the research and/or publication of this article. This research was funded by the NASA Radiation Sciences Program managed by Hal Maring and NASA grants NNH16ZDA001N-CAMP2EX and NNH19ZDA001N-PACESAT.
Acknowledgments
We are tremendously grateful to the
Conflict of interest
Author AW was employed by Autonomic Integra LLC.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The author(s) declared that they were an editorial board member of Frontiers, at the time of submission. This had no impact on the peer review process and the final decision.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Any alternative text (alt text) provided alongside figures in this article has been generated by Frontiers with the support of artificial intelligence and reasonable efforts have been made to ensure accuracy, including review by the authors wherever possible. If you identify any issues, please contact us.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Alexandrov, M. D., Cairns, B., Emde, C., Ackerman, A. S., and van Diedenhoven, B. (2012a). Accuracy assessments of cloud droplet size retrievals from polarized reflectance measurements by the research scanning polarimeter. Remote Sens. Environ. 125, 92–111. doi:10.1016/j.rse.2012.07.012
Alexandrov, M. D., Cairns, B., and Mishchenko, M. I. (2012b). Rainbow fourier transform. J. Quant. Spectrosc. Radiat. Transf. 113, 2521–2535. doi:10.1016/j.jqsrt.2012.03.025
Alexandrov, M. D., Cairns, B., Wasilewski, A. P., Ackerman, A. S., McGille, M. J., Yorks, J. E., et al. (2015). Liquid water cloud properties during the polarimeter definition experiment (PODEX). Remote Sens. Environ. 169, 20–36. doi:10.1016/j.rse.2015.07.029
Alexandrov, M. D., Cairns, B., Emde, C., Ackerman, A. S., Ottaviani, M., and Wasilewski, A. P. (2016a). Derivation of cumulus cloud dimensions and shape from the airborne measurements by the research scanning polarimeter. Remote Sens. Environ. 177, 144–152. doi:10.1016/j.rse.2016.02.032
Alexandrov, M. D., Cairns, B., van Diedenhoven, B., Ackerman, A. S., Wasilewski, A. P., McGill, M. J., et al. (2016b). Polarized view of supercooled liquid water clouds. Remote Sens. Environ. 181, 96–110. doi:10.1016/j.rse.2016.04.002
Alexandrov, M. D., Cairns, B., Sinclair, K., Wasilewski, A. P., Ziemba, L., Crosbie, E., et al. (2018). Retrievals of cloud droplet size from the research scanning polarimeter data: validation using in situ measurements. Remote Sens. Environ. 210, 76–95. doi:10.1016/j.rse.2018.03.005
Alexandrov, M., Miller, D., Rajapakshe, C., Fridlind, A., van Diedenhoven, B., Cairns, B., et al. (2020). Vertical profiles of droplet size distributions derived from cloud-side observations by the research scanning polarimeter: tests on simulated data. Atmos. Res. 239, 104924. doi:10.1016/j.atmosres.2020.104924
Alexandrov, M. D., Emde, C., van Diedenhoven, B., and Cairns, B. (2021). Application of radon transform to multi-angle measurements made by the research scanning polarimeter: a new approach to cloud tomography. Part I: theory and tests on simulated data. Front. Remote Sens. 2, 791130. doi:10.3389/frsen.2021.791130
Alexandrov, M., Cairns, B., Emde, C., and van Diedenhoven, B. (2024). Correction of cloud optical thickness retrievals from nadir reflectances in the presence of 3D radiative effects. Part I: concept and tests on 3D RT simulations. Front. Remote Sens. 5, 1397631. doi:10.3389/frsen.2024.1397631
Alexandrov, M., Cairns, B., van Diedenhoven, B., and Emde, C. (2025). Correction of cloud optical thickness retrievals from nadir reflectances in the presence of 3D radiative effects. Part II: theory. J. Atmos. Sci. 82, 933–941. doi:10.1175/JAS-D-24-0209.1
Cairns, B., Russell, E. E., and Travis, L. D. (1999). “Research scanning polarimeter: calibration and ground-based measurements,”. Polarization: measurement, analysis, and remote sensing. Editors D. H. Goldstein,, and D. B. Chenault (Proc. SPIE, Bellingham, WA), 3754, 186–197. doi:10.1117/12.366329
Christopoulos, J. A., Saide, P. E., Ferrare, R., Collister, B., Barton-Grimley, R. A., Scarino, A. J., et al. (2025). Improving planetary boundary layer height estimation from airborne lidar instruments. J. Geophys. Res. Atmos. 130, e2024JD042538. doi:10.1029/2024jd042538
Collow, A. B. M., Buchard, V., Colarco, P. R., da Silva, A. M., Govindaraju, R., Nowottnick, E. P., et al. (2022). An evaluation of biomass burning aerosol mass, extinction, and size distribution in GEOS using observations from CAMP2Ex. Atmos. Chem. Phys. 22, 16091–16109. doi:10.5194/acp-22-16091-2022
Doicu, A., Doicu, A., Efremenko, D. S., and Trautmann, T. (2022a). Cloud tomographic retrieval algorithms I: surrogate minimization method. J. Quant. Spectrosc. Radiat. Transf. 277, 107954. doi:10.1016/j.jqsrt.2021.107954
Doicu, A., Doicu, A., Efremenko, D. S., and Trautmann, T. (2022b). Cloud tomographic retrieval algorithms II: adjoint method. J. Quant. Spectrosc. Radiat. Transf. 285, 108177.
Edwards, E.-L., Reid, J. S., Xian, P., Burton, S. P., Cook, A. L., Crosbie, E. C., et al. (2022). Assessment of NAAPS-RA performance in maritime southeast Asia during CAMP2Ex. Atmos. Chem. Phys. 22, 12961–12983. doi:10.5194/acp-22-12961-2022
Emde, C., Buras, R., Mayer, B., and Blumthaler, M. (2010). The impact of aerosols on polarized sky radiance: model development, validation, and applications. Atmos. Chem. Phys. 10, 383–396. doi:10.5194/acp-10-383-2010
Lee, B., Di Girolamo, L., Zhao, G., and Zhan, Y. (2018). Three-dimensional cloud volume reconstruction from the Multi-angle imaging SpectroRadiometer. Remote Sens. 10, 1858. doi:10.3390/rs10111858
Levis, A., Schechner, Y. Y., Davis, A. B., and Loveridge, J. (2020). Multi-view polarimetric scattering cloud tomography and retrieval of droplet size. Remote Sens. 12, 2831. doi:10.3390/rs12172831
Loveridge, J., Levis, A., Di Girolamo, L., Holodovsky, V., Foster, L., Davis, A. B., et al. (2023). Retrieving 3D distributions of atmospheric particles using atmospheric tomography with 3D radiative transfer – part 1: model description and Jacobian calculation. Atmos. Meas. Tech. 16, 1803–1847. doi:10.5194/amt-16-1803-2023
Martin, W. G. K., and Hasekamp, O. P. (2018). A demonstration of adjoint methods for multi-dimensional remote sensing of the atmosphere and surface. J. Quant. Spectrosc. Radiat. Transf. 204, 215–231. doi:10.1016/j.jqsrt.2017.09.031
Mayer, B. (2009). Radiative transfer in the cloudy atmosphere. Eur. Phys. J. Conf. 1, 75–99. doi:10.1140/epjconf/e2009-00912-1
McBride, B. A., Martins, J. V., Cieslak, J. D., Fernandez-Borda, R., Puthukkudy, A., Xu, X., et al. (2024). Pre-launch calibration and validation of the airborne hyper-angular rainbow polarimeter (AirHARP) instrument. Atmos. Meas. Tech. 17, 5709–5729. doi:10.5194/amt-17-5709-2024
Milinevsky, G., Oberemok, Y., Syniavskyi, I., Bovchaliuk, A., Kolomiets, I., Fesianov, I., et al. (2019). Calibration model of polarimeters on board the Aerosol-UA space mission. J. Quant. Spectrosc. Radiat. Transf. 229, 92–105. doi:10.1016/j.jqsrt.2019.03.007
Mishchenko, M. I. (2006). “Glory,” in Earth science reference handbook: a guide to NASA’s Earth science program and Earth observing satellite missions. Editors C. L. Parkinson, A. Ward, and M. D. King (National Aeronautics and Space Administration, Washington, D.C.), 141–147.
Mishchenko, M. I., Cairns, B., Kopp, G., Schueler, C. F., Fafaul, B. A., Hansen, J. E., et al. (2007). Accurate monitoring of terrestrial aerosols and total solar irradiance: introducing the glory mission. Bull. Amer. Meteorol. Soc. 88, 677–692. doi:10.1175/bams-88-5-677
Nakajima, T., and King, M. D. (1990). Determination of the optical thickness and effective particle radius of clouds from reflected solar radiation measurements. Part I: theory. J. Atmos. Sci. 47, 1878–1893. doi:10.1175/1520-0469(1990)047<1878:dotota>2.0.co;2
Radon, J. (1917). “Über die Bestimmung von Funktionen durch ihre Integralwerte längs gewisser Mannigfaltigkeiten,” in Berichte über die Verhandlungen der Königlich-Sächsischen Akademie der Wissenschaften zu Leipzig, Mathematisch-Physische Klasse (Leipzig: Teubner), 69, 262–277.
Radon, J., and Parks, P. C. (1986). On the determination of functions from their integral values along certain manifolds. IEEE Trans. Med. Imaging 5, 170–176. doi:10.1109/tmi.1986.4307775
Reid, J., Maring, H., Narisma, G., van den Heever, S., Girolamo, L. D., Ferrare, R., et al. (2023). The coupling between tropical meteorology, aerosol lifecycle, convection, and radiation, during the cloud, aerosol and monsoon processes Philippines experiment (CAMP2Ex). Bull. Amer. Meteorol. Soc. 104, E1179–E1205. doi:10.1175/BAMS-D-21-0285.1
Sienkiewicz, N., Martins, J. V., McBride, B. A., Xu, X., Puthukkudy, A., Smith, R., et al. (2025). HARP2 pre-launch calibration: dealing with polarization effects of a wide field of view. Atmos. Meas. Tech. 18, 2447–2462. doi:10.5194/amt-18-2447-2025
Sinclair, K., van Diedenhoven, B., Cairns, B., Yorks, J., Wasilewski, A., and McGill, M. (2017). Remote sensing of multiple cloud layer heights using multi-angular measurements. Atmos. Meas. Tech. 10, 2361–2375. doi:10.5194/amt-10-2361-2017
Sinclair, K., van Diedenhoven, B., Cairns, B., Alexandrov, M., Moore, R., Crosbie, E., et al. (2019). Polarimetric retrievals of cloud droplet number concentrations. Remote Sens. Environ. 228, 227–240. doi:10.1016/j.rse.2019.04.008
Tzabari, M., Holodovsky, V., Shubi, O., Eytan, E., Koren, I., and Shechner, Y. Y. (2022). Settings for spaceborne 3-D scattering tomography of liquid-phase clouds by the CloudCT mission. IEEE Trans. Geosci. Remote. Sens. 60, 1–16. doi:10.1109/tgrs.2022.3198525
Werdell, P. J.Coauthors (2019). The plankton, aerosol, cloud, ocean ecosystem (PACE) mission: status, science, advances. Bull. Amer. Meteor. Soc. 100, 1775–1794.
Keywords: clouds, tomography, radon transform, research scanning polarimeter, reflectance, airborne remote sensing
Citation: Alexandrov MD, Van Diedenhoven B, Cairns B and Wasilewski AP (2025) Application of radon transform to multi-angle measurements made by the research scanning polarimeter: a new approach to cloud tomography. Part II: examples of retrievals from CAMP2Ex dataset. Front. Remote Sens. 6:1689824. doi: 10.3389/frsen.2025.1689824
Received: 21 August 2025; Accepted: 30 September 2025;
Published: 17 October 2025.
Edited by:
Gennadi Milinevsky, Jilin University, ChinaReviewed by:
Victor Tishkovets, National Academy of Sciences of Ukraine, UkraineYevgen Oberemok, Taras Shevchenko National University of Kyiv, Ukraine
Copyright © 2025 Alexandrov, Van Diedenhoven, Cairns and Wasilewski. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Mikhail D. Alexandrov, bWRhMTRAY29sdW1iaWEuZWR1