 Anna Rubio1*
Anna Rubio1* Julien Mader1
Julien Mader1 Lorenzo Corgnati2
Lorenzo Corgnati2 Carlo Mantovani2
Carlo Mantovani2 Annalisa Griffa2
Annalisa Griffa2 Antonio Novellino3
Antonio Novellino3 Céline Quentin4
Céline Quentin4 Lucy Wyatt5
Lucy Wyatt5 Johannes Schulz-Stellenfleth6
Johannes Schulz-Stellenfleth6 Jochen Horstmann6
Jochen Horstmann6 Pablo Lorente7
Pablo Lorente7 Enrico Zambianchi8Michael Hartnett9Carlos Fernandes10
Enrico Zambianchi8Michael Hartnett9Carlos Fernandes10 Vassilis Zervakis11Patrick Gorringe12
Vassilis Zervakis11Patrick Gorringe12 Angélique Melet13Ingrid Puillat14
Angélique Melet13Ingrid Puillat14- 1AZTI Marine Research, Pasaia, Spain
- 2National Research Council of Italy, Institute of Marine Sciences, Pozzuolo di Lerici, Italy
- 3ETT, Genova, Italy
- 4Aix Marseille Univ, Université de Toulon, CNRS, IRD, MIO, Marseille, France
- 5School of Mathematics and Statistics, University of Sheffield, Sheffield, UK
- 6Helmholtz-Zentrum Geesthacht, Institute of Coastal Research, Geesthacht, Germany
- 7Departamento de Medio Físico, Puertos del Estado, Madrid, Spain
- 8Dipartimento di Scienze e Tecnologie, Università degli Studi di Napoli “Parthenope”, Consorzio Nazionale Interuniversitario per le Scienze del Mare, Napoli, Italy
- 9Department of Civil Engineering, National University of Ireland, Galway, Ireland
- 10Portuguese Hydrographic Institute, Lisboa, Portugal
- 11Department of Marine Sciences, University of the Aegean, Mytilene, Greece
- 12European Global Ocean Observing System (EuroGOOS) AISBL, Brussels, Belgium
- 13Mercator Ocean, Ramonville St. Agne, France
- 14LOPS, UMR 6523 Centre National de la Recherche Scientifique -IFREMER-IRD-UBO, IFREMER Centre de Brest, Plouzané, France
High Frequency Radar (HFR) is a land-based remote sensing instrument offering a unique insight to coastal ocean variability, by providing synoptic, high frequency and high resolution data at the ocean atmosphere interface. HFRs have become invaluable tools in the field of operational oceanography for measuring surface currents, waves and winds, with direct applications in different sectors and an unprecedented potential for the integrated management of the coastal zone. In Europe, the number of HFR networks has been showing a significant growth over the past 10 years, with over 50 HFRs currently deployed and a number in the planning stage. There is also a growing literature concerning the use of this technology in research and operational oceanography. A big effort is made in Europe toward a coordinated development of coastal HFR technology and its products within the framework of different European and international initiatives. One recent initiative has been to make an up-to-date inventory of the existing HFR operational systems in Europe, describing the characteristics of the systems, their operational products and applications. This paper offers a comprehensive review on the present status of European HFR network, and discusses the next steps toward the integration of HFR platforms as operational components of the European Ocean Observing System, designed to align and integrate Europe's ocean observing capacity for a truly integrated end-to-end observing system for the European coasts.
Introduction
The accurate monitoring of ocean surface transport, which is inherently chaotic and depends on the details of the surface current field at several scales, is key for the effective integrated management of the coastal zone. This has been the main driver for the growth of coastal observatories along the global ocean coasts (Willis, 2015). Among the different measuring systems, High Frequency Radar (HFR) technology offers a unique insight to coastal ocean variability, by providing high resolution data at the interface between ocean and atmosphere. Recent reviews on this technology and its applications worldwide have been provided by several authors (Gurgel et al., 1999; Fujii et al., 2013; Paduan and Washburn, 2013; Wyatt, 2014). HFRs are important sources of data for understanding the coupled ocean-atmosphere system and the different coastal circulation processes like ocean waves, wind-induced currents, tidal flows, (sub)mesoscale variability, and inertial oscillations.
A growing number of European studies have been developed on the use of HFR data toward a better understanding of the surface ocean coastal dynamics (Shrira et al., 2001; Rubio et al., 2011; Schaeffer et al., 2011; Uttieri et al., 2011; Sentchev et al., 2013; Berta et al., 2014a; Shrira and Forget, 2015; Stanev et al., 2015; Falco et al., 2016). Moreover, since HFR data provide measurements of currents with a relatively wide spatial coverage and high spatial and temporal resolution in near real time (there are systems with lags of just 20 min, after generating the data), they have become invaluable tools in the field of operational oceanography.
HFRs, utilized for oceanographic purposes, typically operate in the band between 8 and 37 MHz corresponding to wavelengths of 37–8 m. At these wavelengths the electromagnetic waves propagate along the electrical conductive water surface. Therefore, HFRs enable the measurement of radar backscatter beyond the line of sight, meaning beyond the horizon, which also gave them the name of Over the Horizon Radars. In general an HFR sends out modulated radio waves and listens to the returned signal, which is mainly affected by the surface waves propagating along radar look direction that are of the order of the transmitted wave length (Bragg scattering). From the measured backscatter several oceanic parameters can be obtained, such as: ocean surface currents (e.g., Paduan and Rosenfeld, 1996; Gurgel et al., 1999; Shrira et al., 2001), waves (e.g., Wyatt et al., 2006), winds (e.g., Shen et al., 2012), tsunami (e.g., Lipa et al., 2006) and discrete targets (ships) (e.g., Maresca et al., 2014).
Around 400 HFRs are installed worldwide and are being used in a diverse range of applications (Paduan and Washburn, 2013; Roarty et al., 2016). In Europe, the number of systems is growing with over 50 HFRs currently deployed and a number in the planning stage. Nowadays, these systems are integrated in many European coastal observatories with proven potential for monitoring (e.g., Wyatt et al., 2006; Molcard et al., 2009; Berta et al., 2014b) and even providing short-term prediction of coastal currents (e.g., Orfila et al., 2015; Solabarrieta et al., 2016; Vilibić et al., 2016), and inputs for data assimilation and the validation and calibration of numerical ocean forecasting models, especially near the coast (e.g., Barth et al., 2008, 2011; Marmain et al., 2014; Stanev et al., 2015; Iermano et al., 2016). The growing number of HFRs, the optimization of HFR operation against technical hitches and the need for complex data processing and analysis, highlight the urgent requirement to increase the coordination in the HFR community. A stronger coordination for more efficient data sharing and development of HFR products adapted to the final user needs is the key to foster the application of HFR, and to allow its further development.
Several initiatives at European level have arisen in response to this need and work presently toward a coordinated pan-European HFR network. Within the framework offered by these initiatives and the opportunity set by two ongoing research projects with a strong HFR component, a survey has recently been launched, collecting information on more than 50 operational HFR installations. The outputs of this survey offer a first-time diagnostic of the current development of this technology in Europe and its applications. Partially based on the survey results, this paper offers an overview of the European HFR activities and discusses relevant steps toward the expansion of this technology in Europe. The potential of HFRs to allow an unprecedented step forward in the understanding of ocean processes and transport mechanisms along the European coasts and to provide invaluable products for the development of the European coastal operational oceanography, can only be fully exploited under strong European cooperation, in coherence with the existing initiatives at European and international levels.
Basic Principles of HFR Operation and Data Specifications
HFRs are land-based remote sensing platforms. The use of HFR for monitoring surface currents in the coastal zone was first proposed by Stewart and Joy (1974), following the works on the link between HFR backscatter and surface wave phase speed (Crombie, 1955; Barrick, 1972). HFR relies on resonant backscatter resulting from coherent reflection of the transmitted wave by the ocean waves whose wavelength is half of that of the transmitted radio wave. This is the Bragg scattering phenomenon and it results in the first order peak of the received (backscattered) spectrum (Paduan and Graber, 1997). In absence of currents, the frequency of the first order peak has a Doppler shift caused by the phase velocity (speed) of the waves in the radial direction of the transmitting antenna. Two peaks (Bragg peaks) are shown in the received signal spectrum, symmetric respect to the central transmitting frequency, and associated with the waves traveling toward (right peak) and away (left peak) from the radar. If gravity waves propagate within a current field, an additional Doppler shift affecting both peaks is produced and an asymmetric spectrum can be obtained. The difference between the theoretical speed of the waves and the observed velocity, resulting in the Doppler shift in the observed Bragg peaks, is due to the velocity of the radial component of the current (the current in the same direction of the signal), that can be therefore estimated. Bragg scattering is also responsible for the second order bands in the radar spectrum but here the scatter is from non-linear ocean waves which propagate at different speeds and hence results in a different Doppler shifts and also from multiple scattering. The surface current estimated by HFRs has been suggested to include the entire, or parts of, the wave-induced Stokes drift (Graber et al., 1997; Law, 2001; Ardhuin et al., 2009), while other authors provide evidences against this assumption (Röhrs et al., 2015). In any case the magnitude of this component is expected to be typically smaller than the uncertainties contained in the observation of the Eulerian currents by HFRs (Ardhuin et al., 2009; Röhrs et al., 2015).
In order to locate the scattering area, spatial resolution has to be achieved in range and azimuth (see Gurgel et al., 1999). For the directional resolution, the most conventional design is to use a linear array of monopoles (Figure 1) and to process using the beam-forming (BF) method. This method provides a Doppler spectrum for every cell in the field of view of the radar. So, the radial current velocity deduced from the first order echo, and the wave parameters deduced from the second order, are located in the range and azimuth domain. Azimuthal resolution is dependent on the number of elements in the antenna array and its total length, and can sometimes benefit from alternative processing methods (Sentchev et al., 2013). Another alternative is to perform a procedure called direction-finding (DF) in the frequency domain to obtain azimuthal resolution. In this case, radial velocities are obtained from spectral data by using the MUSIC (MUltiple SIgnal Classification) algorithm (Schmidt, 1986). HFRs using DF technique need a periodic calibration (recommended every 1–2 years). The resulting directional antenna pattern is required for an accurate determination of the radial currents and their direction of arrival (Kalampokis et al., 2016).
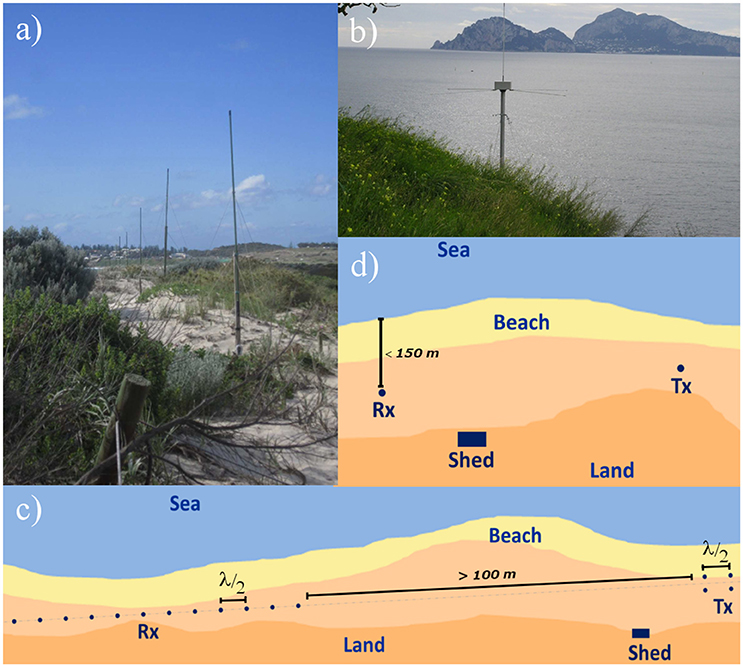
Figure 1. Examples of characteristic HFR installations: pictures of (A) a linear antenna array system and (B) a compact receiver antenna are shown. Also, typical setups of (C) a Phased Array (PA) HFR system with 12 channels and (D) a Direction Finding (DF) HFR system are presented. Rx, receive antenna; Tx, Transmit antenna; Shed, represents typical shed setting for hosting the HFR electronics. Typical separation between Rx and Tx is indicated in (C). For BF radars (C) this distance must be at least 100 m, while the optimum distance for long range systems is 250 m. For DF radars (D) this distance must be at least 60 m for long range systems (4 MHz), while could be zero for 13 MHz or higher frequencies. Typically, the suggested distance of transmitting antenna from coastline is <150 m since bigger distances decrease dramatically the power reaching the sea surface (the distance needs to be shorter for higher transmitting frequencies). Common distance between antennas and shed, which is typically 2 × 2 m, is 100–200 m.
To obtain surface current vectors, an HFR network must include at least two radar sites, each one measuring the radial velocity in its look direction. Thus, once the radial components of the surface currents are calculated, they can be combined in the overlapping area, to provide a surface current vector map (Figure 2). Coverage area and spatial resolution depend respectively on HFR operating frequency and available bandwidth (which is limited by international and national regulations and most of the time is connected with the HFR operating frequency, see Table 1). The typical range resolution ranges from several hundred of meters to 6–12 km. The theoretical maximum range is depending more strictly on the operating frequency and can reach up to more than 200 km (at lower frequencies). Common values for a system of two HFRs operating at 13 MHz are: coverage of 70 × 70 km and range resolution of 1.5 km. Coverage and resolution of the total map are also affected by the geometry of the radar network along the coast (Heron and Atwater, 2013). The typical spatial scales resolved by the HFRs depend mainly on the resolution of the data, and thus mainly on the frequency of operation of the systems (Table 1). Several examples in the literature deal with the observation through HFR of small scale eddies. For instance, Parks et al. (2009) and Archer et al. (2015) investigated O(10–20) km eddies along frontal regions of the Florida Current using a 16 MHz. Similar spatial scales where studied by Sentchev et al. (2013) after improving resolution of a 12.14 MHz radar using alternative processing methods. Other authors have utilized very HFRs with a high horizontal resolution of (250–400 m) to study O(2–3) km vortices over the shelf in different areas (e.g., Shay et al., 2000; Kim, 2010; Kirincich, 2016).
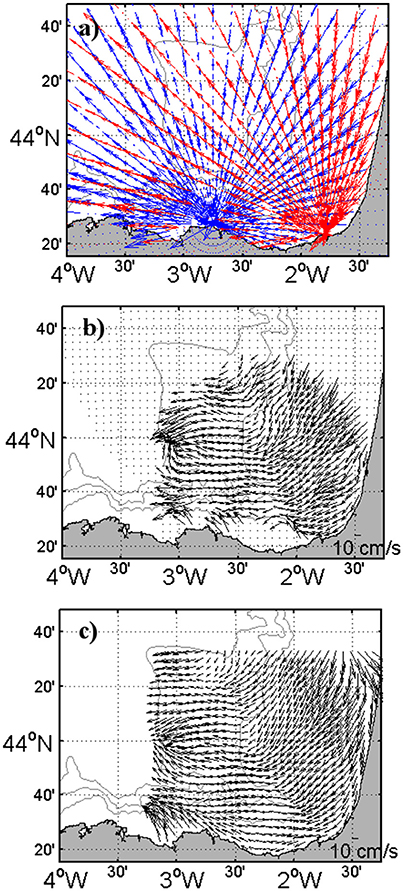
Figure 2. Snapshot of HFR (A) radial and total current fields obtained by using a (B) Least Squares algorithm and (C) the OMA method (Kaplan and Lekien, 2007) in the southeast Bay of Biscay.
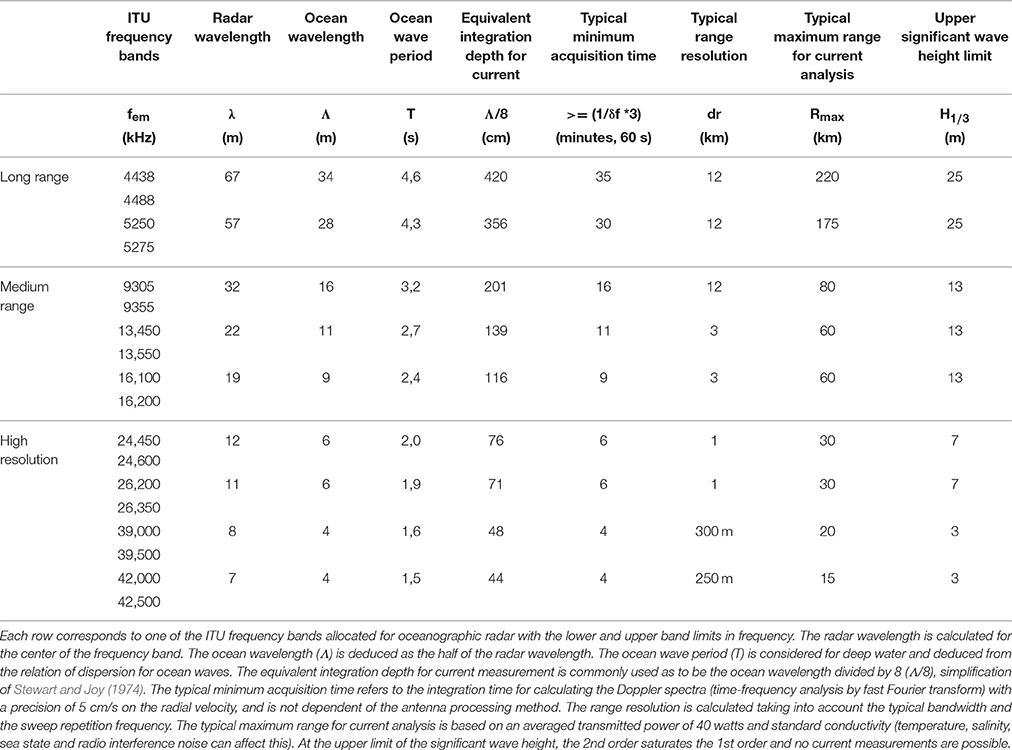
Table 1. HFR performance vs. operating frequency.
The first order part of the signal is also used to estimate wind direction under the assumption that the Bragg waves are locally wind driven and aligned with the wind. A one (wind direction) or two (direction and spreading) parameter model of the directional distribution of wind-wave energy is assumed and the parameters of this are found by fitting to the relative amplitude of the two first order peaks (Wyatt et al., 1997). When radar data quality is good, this approach has been shown to give good results (Wyatt, 2012) except in very low sea-states when the wind and Bragg waves are no longer aligned. Wyatt (2012) quotes RMSDs between radar and measured or modeled wind direction of between 30 and 50°, but in Wyatt et al. (2006) a value of 23° was found when low sea-states were removed from the analysis. As mentioned above, the second order signal is mostly generated by non-linear waves. Barrick and Weber (1977) provided a solution to this scattering problem which can be written in the form of a non-linear integral equation (Lipa and Barrick, 1986; Holden and Wyatt, 1992). Wave measurements are made either by inverting this equation (Barrick, 1977; Lipa, 1977; Wyatt, 1990; Hisaki, 1996; Hashimoto and Tokuda, 1999; Green and Wyatt, 2006) or by empirical methods obtained by relating the amplitude, or integrated amplitude, of the second order spectrum (or moments thereof) to wave buoy measurements (Maresca and Georges, 1980; Wyatt, 2002; Gurgel et al., 2006; Wang et al., 2016). Note that this latter approach is sensitive to water depth and users have found it necessary to recalibrate in different situations. Empirical methods have been applied to obtain wave measurements from single radar systems, but these are not always as accurate as those obtained using data from systems with more than one radar because directional factors are important (Wyatt, 2002). In the case of DF systems, the integral equation has to be convolved with the antenna pattern making the solution more difficult and requiring assumptions of homogeneity in the wave field for all directions within each range. In practice, the antenna pattern can also impact on the solution for linear array systems since high side lobes can be misidentified as large low frequency waves (Wyatt et al., 2005). However, where this is not a problem and the radar data is otherwise good, good quality wave measurements have been obtained (Wyatt et al., 2003, 2006). There is no one figure for the accuracy of wave measurements since many different parameters are being measured. Many published comparisons between radar and buoy wave measurements are limited to significant waveheight for which correlations are usually > 0.9 with RMS of 20–30% (Wyatt et al., 2003, 2006). The reader is referred to those papers for an assessment of the accuracy of other parameters, e.g., mean period, peak direction. An example of wave data from a BF radar system for a case where swell is opposing the wind direction is shown in Figure 3. The spectra (frequency on the left and directional on the right) show strong swell (also evident in the peak wave directions on the map) with wind waves increasing in amplitude and peak frequency further offshore. Other products that can be obtained by means of advanced signal processing include: winds (Heron and Rose, 1986; Shen et al., 2012), and tsunami (Lipa et al., 2006; Gurgel et al., 2011; Grilli et al., 2015). In addition, several works have proven the potential use of HFRs for ship detection (Ponsford et al., 2001; Dzvonkovskaya et al., 2008) and tracking (Maresca et al., 2014). An example of ship detection using HFR is provided in Figure 4.
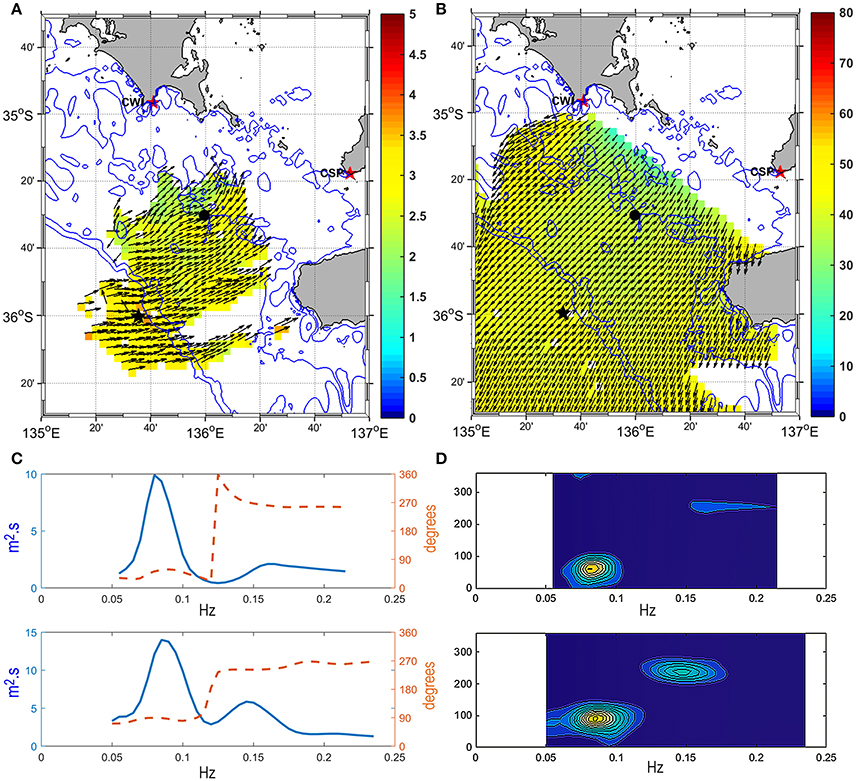
Figure 3. Example of HFR-derived wave data (28/06/2011 02:00) in South Australia showing a bimodal sea state (swell from the SW and local sea from the E and winds from NE): (A) Significant wave height and peak direction (color bar provides significant wave height in meters), (B) Wind direction and directional spreading (color bar provides directional spreading in degrees), (C) Frequency spectrum (blue) and mean direction at each frequency (red) at two locations, one in shallower seas (top, black dot on the maps A,B) and the other (bottom, black star on the maps A,B) near the shelf edge (x axis: Hz, y axis: spectral density), (D) The corresponding directional spectra (x axis: Hz, y axis: degrees; spectral density, in m2.s.radian−1, is color-coded).
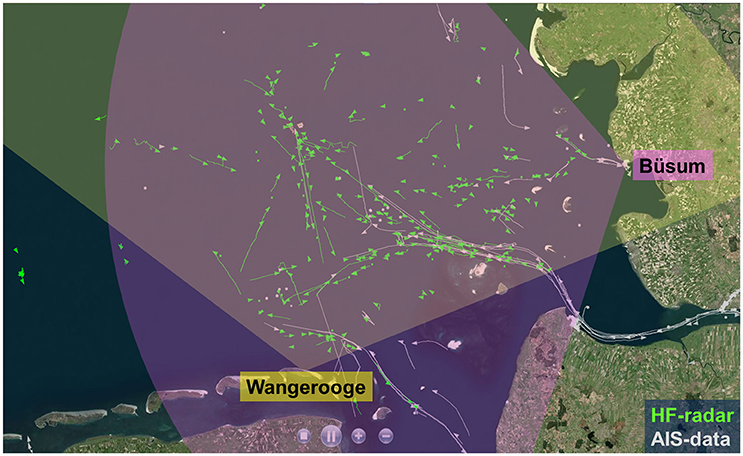
Figure 4. Map of ship detections in the German Bight resulting from fusion of HFRs at Wangerooge and Büsum covering the German Bight of the southern North Sea. The ship detections are plotted in green and the corresponding positions of the Automatic Identification System (AIS) are depicted in gray.
HFRs provide current data only relative to the surface within an integration depth ranging from tens of cms to 1–2 m, depending on the operating frequency (see typical values in Table 1). Moreover, data coverage is not always regular, for a number of reasons. Spatial and temporal data gaps may occur at the outer edge, as well as inside the measurement domain. This can be due to several environmental and electromagnetic causes: the lack of Bragg scattering ocean waves or severe ocean wave conditions (see Table 1 for reference), low salinity environments, the occurrence of radio interference. Geometric Dilution Of Precision (GDOP, Chapman et al., 1997) is at the origin of systematic low reliability of velocity vectors at the edge of the observed domain, as well as along the baseline connecting receiving antennas. The accuracy of the total vector maps also depends on the number of radial velocities from each radar site involved in the combination process, known as Geometrical Dilution Of Statistical Accuracy (GDOSA, Barrick, 2002). Different techniques are used to combine radial data to totals (e.g., Least Square methods described in Lipa and Barrick, 1983), and including those like Optimal Interpolation (Kim et al., 2008), Open boundary Modal Analysis (OMA, Kaplan and Lekien, 2007) or Variational Analysis (Yaremchuk and Sentchev, 2011) that allow data-gap filling.
Another important issue is the assessment of data uncertainty. As described by Lipa (2013), if we assume that the radar hardware is operating correctly, we can identify different sources of uncertainty in the radial velocities: (a) variations of the radial current component within the radar scattering patch; (b) variations of the current velocity field over the duration of the radar measurement; (c) errors/simplifications in the analysis (e.g., incorrect antenna patterns or errors in empirical first order line determination); (d) statistical noise in the radar spectral data, which can originate from power-line disturbances, radio frequency interferences, ionosphere clutter, ship echoes, or other environmental noise (Kohut and Glenn, 2003). One of the main factors affecting the accuracy of the radial velocities is the integration time used for calculating the Doppler spectra at each time step. The typical minimum acquisition times, which is dependent of the operating frequency (but no of the antenna processing method), to obtain a precision of 5 cm.s−1 on the radial velocity is displayed in Table 1. Recently, Forget (2015) presented a method to estimate noise properties of HFR measurements (again for both BF and DF processing) and to estimate the minimum timescales of variability that can be resolved given the intrinsic noise of the measurement. When applied to different HFR data sets from radars operating at 16.15 MHz in the NW Mediterranean, the method suggested noise amplitudes up to 8 cm.s−1. When dealing with total currents, as commented previously, additional geometric errors can affect the accuracy of the HFR data. These errors (GDOP and GDOSA) are distributed spatially and can be controlled and estimated in the processing from total to radials (Chapman et al., 1997; Barrick, 2002). Related to the data uncertainties, it is worth mentioning that a number of validation exercises exist, based on comparisons of HFR currents against independent in situ measurements (Kohut and Glenn, 2003; Kaplan et al., 2005; Paduan et al., 2006; Ohlmann et al., 2007; Cosoli et al., 2010; Lorente et al., 2014, 2015a,b; Solabarrieta et al., 2014; Kalampokis et al., 2016). These validation exercises can be limited by the fact that part of the discrepancies observed through these comparisons are due to the specificities and own inaccuracies of the different measuring systems (Solabarrieta et al., 2014; Kalampokis et al., 2016). Indeed, the spatial and temporal scales measured with HFR are not the same that those of point-wise acoustic Doppler current profilers or drifters, so it can be expected that vertical or horizontal shear in currents contribute also to the RMSDs observed between measurements. The differences between HFRs and fixed current profilers might be also affected by the contribution of the Stokes drift (Ardhuin et al., 2009), which will not be measured by the later. This can explain the significant scatter found in the literature concerning point to point comparison between HFR and other in situ measurements. When HFR data are compared with surface drifter clusters or ADCPs whose uppermost bins are not deeper than 5 m, RMSDs typical values range between 3 and 12 cm.s−1 (e.g., Ohlmann et al., 2007; Molcard et al., 2009; Liu et al., 2010; Kalampokis et al., 2016).
Significant efforts have recently been devoted to identify and eventually replace occasional non-realistic radar current vectors, usually detected at the outer edges of the radar domain (Wyatt, 2015). The potential elimination of accurate data, when the discriminating algorithm is based on tight thresholds, is the main disadvantage of quality-control procedures. Some fine-tuning, according to the specific local conditions of the system, is thus required to have the right trade-off between confirmed outlier identification and false alarm rate (Gómez et al., 2014). A number of previous works have focused on defining optimum threshold levels (e.g., Lorente et al., 2014, 2015a,b) but there is still no worldwide consensus. Current initiatives intend to use non-velocity-based metrics related to the characteristics of the received signal (radial and total coverage analysis, hardware status, quality of the received signal) in order to implement advanced quality controls (Kirincich et al., 2012).
Several HFR systems exist in Europe; nevertheless two are the most widespread: WERA (WavE Radar, developed by the University of Hamburg in the 1990s) and CODAR (Coastal Ocean Dynamics Application Radar, developed at NOAA's Wave Propagation Laboratory in the 1980s). The main differences between WERA and CODAR radars are analyzed in detail in Gurgel et al. (1999) and Heron and Atwater (2013). WERA systems, which typically use 8–16 channels for the receive array (Gurgel et al., 1999), are based on the BF method although the data can also be analyzed with DF. CODAR systems rely on a compact antenna with one electric monopole and two magnetic dipoles, and obtain the direction of the backscattered signal by applying DF. These two systems provide basically the same outputs, while presenting some differences in hardware and data processing that may impact azimuthal resolution (angular resolution) and the capacity of accurately resolving wave-induced second-order spectral bands (i.e., for measuring surface wave spectra).
Applications of HFR Measurements in the Framework of the European Coastal Integrated Management
The main potential of HFR resides in the fact that these systems can offer high temporal and spatial resolution synoptic current maps. Presently, no other observational technology can offer such a detailed insight to mesoscale coastal ocean surface currents and a continuous near real time monitoring of coastal transports with such high temporal and spatial resolutions (Paduan and Washburn, 2013). In addition to a lot of scientific work related to the study and characterization of physical ocean processes, there are several other applications of HFR in research and marine management. Some of the examples provided in Paduan and Washburn (2013) include direct applications of HFR data to search and rescue (SAR) (Ullman et al., 2006) or oil-spill mitigation (e.g., Abascal et al., 2009; Frolov et al., 2012), marine traffic information (Breivik and Saetra, 2001), water quality assessment (e.g., Kim et al., 2009) and biological oceanography (e.g., Nishimoto and Washburn, 2002; Brzezinski and Washburn, 2011).
In Europe, an increasing literature on HFR reveals the ongoing efforts toward the applications of this technology in different sectors. Since the applications related to the management of the marine environment and emergencies at sea require accurate prediction of Lagrangian trajectories, several studies have assessed the effectiveness of trajectory predictions using currents derived from HFR (Menna et al., 2007; Uttieri et al., 2011; Solabarrieta et al., 2016). An example of calculation of Lagrangian trajectories using HFR data is shown in Figure 5. Recently, several dispersion models have been combined with weather and sea state observations to provide forecasting scenarios that can be crucial to minimize the efforts to be done to manage the emergency (Castanedo et al., 2006; Abascal et al., 2009). In particular, Abascal et al. (2009) combined the HFR currents, as well as numerical wind data to simulate trajectories using the TESEO oil spill transport model. Their study shows the positive contribution of HFR currents for trajectory analysis and support the combination of HFR and dispersion models in case of oil spills or SAR (Bellomo et al., 2015).
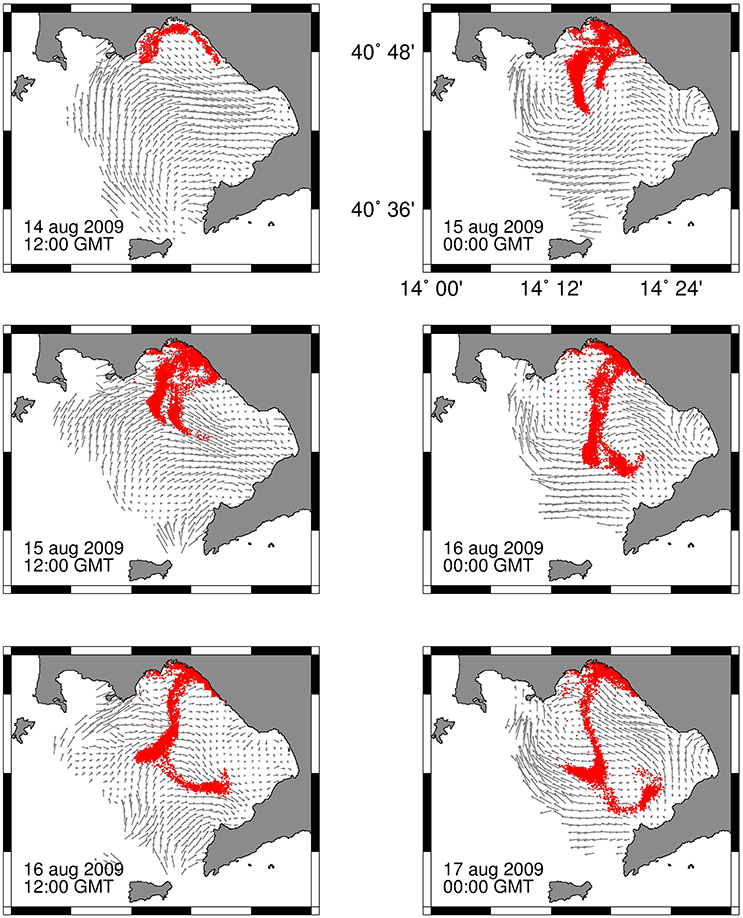
Figure 5. Example of Lagrangian application. Series of 12-h snapshots of the time evolution of 10,000 tracer particles in the Gulf of Naples, deployed along the urban littoral, dispersing over the whole Gulf and eventually reaching the opposite Sorrento peninsula in the turn of 3 days (Gulf of Naples AMRA-CoNISMa-UniParthenope HFR system; for validation of these results with satellite imagery see Uttieri et al., 2011).
As stated previously, HFRs provide current data relative to the first 1–2 m of the water column. However, HFR-derived data can be exploited to provide information regarding the structure in the upper water column. The most widespread method to extract information of the velocity shear within the interior of the sea is the use of multiple-frequency radars. In their pioneering work, Stewart and Joy (1974) used HFRs transmitting at several frequencies between 3 and 12 MHz, and recorded an increase of the velocity magnitude with increasing frequency of transmission. More observations of current vertical differences using multiple frequencies (Barrick, 1972; Broche et al., 1987) led to the a more widespread use and validation of the method (Paduan and Graber, 1997; Teague et al., 2001). Another method to derive shear using a single frequency HFR has been suggested by Shrira et al. (2001) and validated by Ivonin et al. (2004). Furthermore, Shrira and Forget (2015) recently showed that it is possible to assess the strength of the stratification below the surface mixed-layer by studying the near-inertial response of the mixed-layer as recorded by HFRs. More recently, Zervakis et al. (2016) proposed a method to estimate the thickness of the surface mixed-layer using concurrent measurements of surface currents and wind, applied on HFR data (Figure 6). Finally, an application exploiting HFR data to obtain subsurface currents is the “velocity projection” method (Shen and Evans, 2002), which has been applied successfully at Chesapeake Bay (Marmorino et al., 2004; Gangopadhyay et al., 2005).
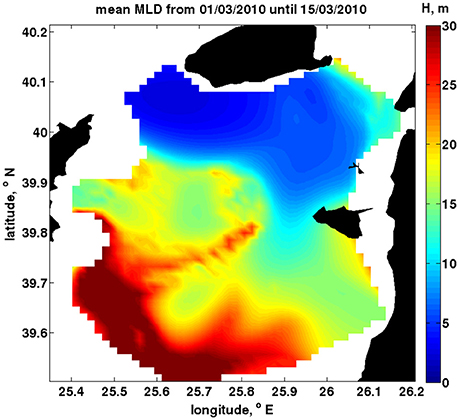
Figure 6. Example of mixed-layer depth estimation (color-coded, in meters) from HFR in the region of Black Sea inflow in the Mediterranean (NE Aegean Sea), see Zervakis et al. (2016).
Other approaches are based on the combination of HFR data with information on the water column, from in situ moored instruments, remote sensors or regional/coastal circulation model simulations. These approaches offer further interesting possibilities for understanding the three-dimensional coastal circulation (O'Donncha et al., 2014; Cianelli et al., 2015; Ren et al., 2015a; Jordà et al., 2016). It can also extend HFR applications on biological, geochemical and several environmental issues, since ecological quantities or pollutants can be located deeper in the water columns and not only follow surface dynamics. An important open research line is to exploit the complementarity and synergy between HFR measurement in coastal areas and satellite remote sensing of currents on global scales (Pascual et al., 2015; Troupin et al., 2015). The blending of Lagrangian and Eulerian observations to enhance the estimate of surface transport has been recently explored in the Ligurian Sea (Berta et al., 2014b). An additional challenge is the so-called upscaling problem, i.e., how the information acquired on a coastal scale can be propagated up to the regional scale, in order to achieve positive impacts over larger areas (Schulz-Stellenfleth and Stanev, 2016).
HFRs provide researchers with a wealth of surface current data that can be used as benchmark for the rigorous skill assessment of operational circulation models in key coastal areas (Cosoli et al., 2013; Guihou et al., 2013; Lorente et al., 2016). A number of publications already exists on the assimilation of surface HFR data (Breivik and Saetra, 2001; Paduan and Shulman, 2004; Barth et al., 2008, 2011; Ren et al., 2015b; Sperrevik et al., 2015; Stanev et al., 2015; Iermano et al., 2016, to mention only a few examples). Using different assimilation approaches (e.g., optimal interpolation, ensemble Kalman methods, 4DVAR) it was demonstrated that HFR data can be used to significantly improve forecasts of currents and other oceanographic variables in coastal areas. There seems to be, however, room for improvement, e.g., concerning the length of the forecast horizons. The choice of an optimal assimilation scheme is quite dependent on the characteristic processes in the considered area (e.g., tidal dominated, density driven currents) and their respective memory. Also, there is still some work to do with regard to the removal of systematic model errors. In the past, most numerical models were tuned with respect to classical observations, e.g., tide gauges, and further studies are required, in order to make full use of the information contained in HFR data. The characterization of the model errors is probably the most difficult part of data assimilation. In the context of surface currents, a large variety of potential error sources exists, like those associated to open boundary or meteorological forcing, bathymetry errors, bottom roughness errors, or deficiencies in turbulence parametrization. In addition, surface currents are affected by complex coupling processes between the current field, wind driven surface waves and the atmosphere (e.g., Solabarrieta et al., 2014; Staneva et al., 2016). The optimal treatment of these processes in numerical models is still subject of ongoing research and HFR data can play an important role in this context. In parallel, several efforts have also focused on the assimilation of HFR-derived wave data, which have not been as extensively explored since they are much more sensitive to the noise of the Doppler spectrum than current estimations. There is a variety of valuable initiatives to implement operational assimilation schemes of HFR data into wave models (e.g., Siddons et al., 2009; Waters et al., 2013), since data assimilation provides the integrative framework for maximizing the joint utility of HFR observations and numerical models.
Approaches like empirical models can be used to forecast future currents based on a short time history of past observations. Some recent works have applied empirical models to HFR data to obtain Short Term Predictions (STP), typically in a 24-h window. Barrick et al. (2012) used OMA decomposition (Kaplan and Lekien, 2007) and then a set of temporal modes was fitted to the time series of OMA coefficients over a short training period. Frolov et al. (2012) used Empirical Orthogonal Functions (EOF) decomposition of HFR fields and a vector autoregressive model on the leading EOFs time series for prediction, incorporating wind stress forecast from a regional atmospheric model. Orfila et al. (2015) used a Genetic Algorithm to identify mathematical expressions that best forecast the time series of statistically significant EOFs. Solabarrieta et al. (2016) applied the linear autoregressive models described in Frolov et al. (2012) to perform an analysis of their spatio-temporal performances in a multi-year experiment in the Southeastern Bay of Biscay. A neural network based approach to obtain short term forecasts for currents and water levels from HFR data was presented in Wahle and Stanev (2011). Recently, Vilibić et al. (2016) presented an ocean surface currents forecasting system, based on a Self-Organizing Maps and applied to HFR measurements and wind numerical forecasts.
HFR Activity in Europe
This section is made upon the results of the HFR European survey (Mader et al., 2016) launched in summer 2016, which gathered data from 28 European institutions (see Table 2), 23 of those were operators of ongoing or past HFR networks. The survey, whose main aim was to diagnose the present status of the HFR activities in Europe, provided information on: (i) the network and sites (number, names, locations, working parameters, maintenance procedures and issues), (ii) data formats, sharing protocols and policies, Quality Assessment/Quality Control (QA/QC) protocols and data processing, and (iii) main areas of application of the data and identified users. Although the resulting inventory does not list strictly all the HFR operational networks or all the past HFR deployments along the European coasts, it offers a first-time view of the HFR activity in Europe. A total of 73 sites (organized in 28 networks) were listed from the survey results, 52 of those sites (20 networks) were operational at the time of writing. Within the remaining sites there were 9 past installations or installations no longer providing operational data (3 networks) and 12 more installations (5 networks) were planned. The information provided in the following describes several aspects of the operational and past networks (N = 23) and their corresponding sites (N = 61).
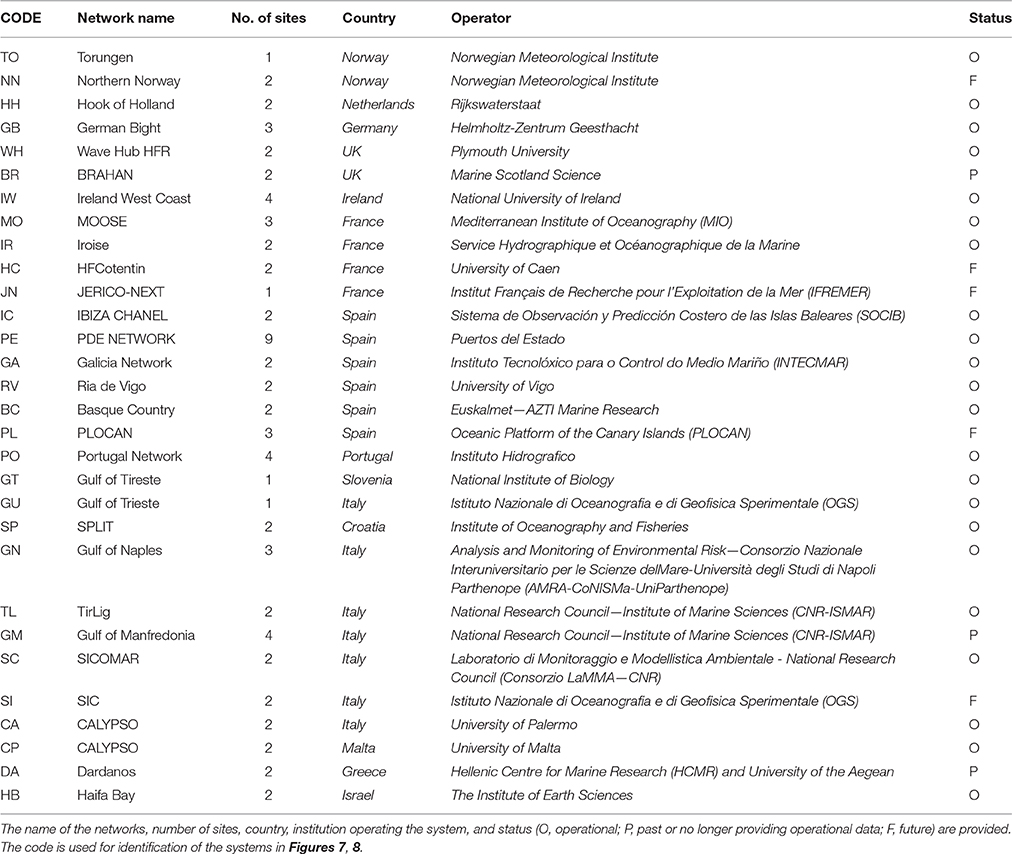
Table 2. List of HFR systems included in the inventory.
Figure 7 shows the location of the systems listed by the survey, with a graphical representation of the footprint areas for each antenna. The distribution of the identified ongoing and past sites amongst the different Regional Ocean Observing Systems (ROOS) areas coordinated by the European Global Ocean Observing System (EuroGOOS)1 is: 52% (32) in MONGOOS (Mediterranean Operational Network for the Global Ocean Observing System), 28% (17) in IBIROOS (Ireland-Biscay-Iberia Regional Operational Oceanographic System) and 20% (12) in NOOS (North West European Shelf Operational Oceanographic System). Based on the responses provided, 92% (48) of the operational installations are considered to be permanent. The remaining systems are temporary, with undefined dates of end of use.
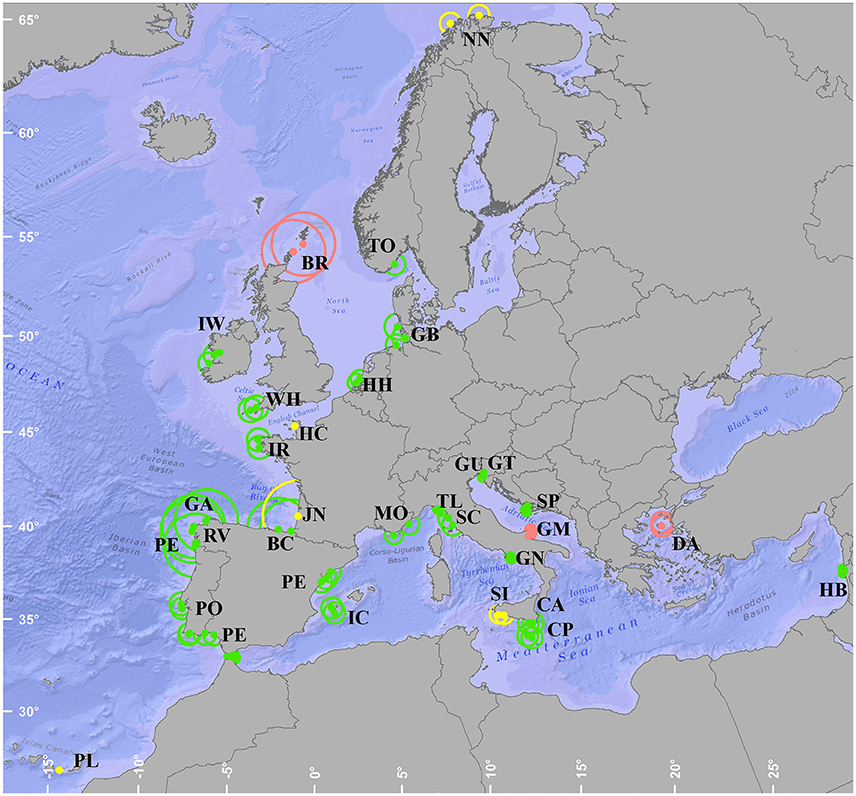
Figure 7. Map with the location of the 73 European HFR sites listed in the survey, and their theoretical range (represented by the circles scaled to typical radial range associated to the frequency of operation of each of the systems). Past systems or those no longer providing operational data are plotted in red, future deployments in yellow and operational systems in green. The name of the networks is displayed using the coding listed in Table 2.
Figure 8 shows the evolution in time of the number of HFR systems in Europe. The first long-term installation registered was that of the Gulf of Naples at the end of 2004 (note that there were many HFR deployments in Europe previous to this date, but the information on those systems was not collected by the survey). From 2004 until 2009 a moderate growth rate of two new HFRs per year is observed. From that date to now, the rate has increased to around six new HFRs installed per year, a tendency which is expected to be maintained at least in the next year.
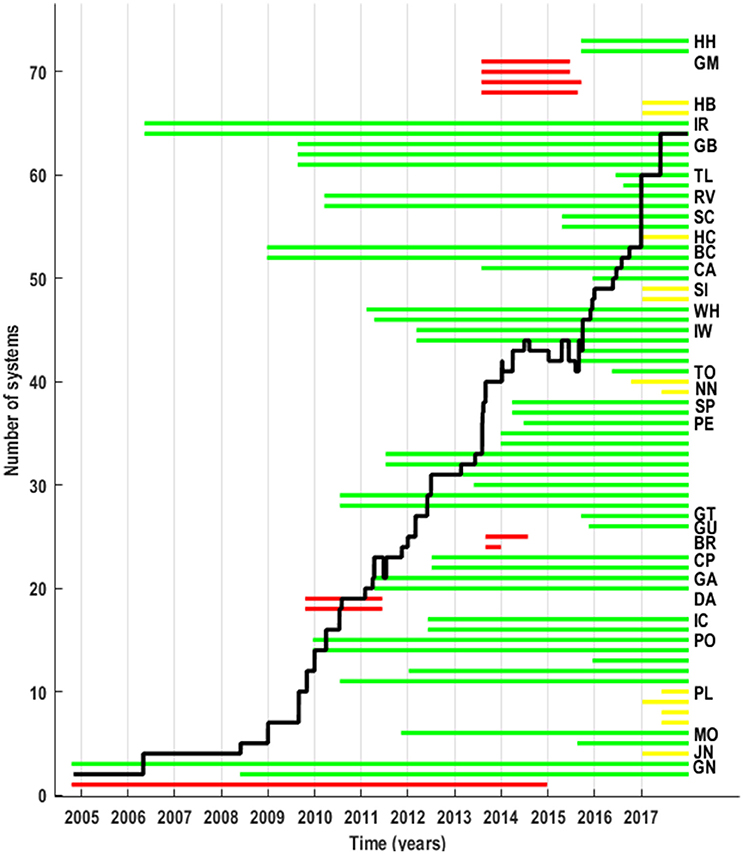
Figure 8. Temporal evolution of the number of HFRs in Europe. The bold black line shows the number of operational systems per year (y axis). The timeline of each of the HFR installations is provided by the discontinuous lines. Past systems or those no longer providing operational data are plotted in red, future deployments in yellow and operational systems in green. The name of each of networks as provided in the survey is given besides the corresponding sites' timelines. The name of the networks is displayed using the coding listed in Table 2.
The most typical European HFR network is built of two sites and operated for several years. The operating frequencies of the systems range from very high frequency like the one in Ria de Vigo (Spain) working at 46.5 MHz (thus providing a range resolution finer than 200 m, however with a limited range) to long range systems working at 4.5 MHz (providing a range resolution of 5 km) as the ones used in Spain or UK. They offer typically temporal resolution of 1 h or less and variable spatial coverage depending on their working frequency and system design. Around 80% of the European HFRs are being or have been operated using DF, while a 20% are using BF in a phased array. One system falls in the middle of these two categories, using DF on eight receiving antenna array. The systems are operated by different kinds of institutions, from Academia to technological centers and from meteorological agencies to governmental organizations. The frequency of in situ technical maintenance operations is variable. Most of the systems are maintained in situ periodically (every 3–6 months or yearly), while for 20% of the systems in situ maintenance is sporadic; they are performed after changes at the antennae arrays, or technical issues appear. For several systems, additional remote check is performed on a monthly basis or even daily. The occurrence of interference is reported, with around 30% of the systems experiencing interferences at some level, which reduce the Signal to Noise Ratios (SNRs) with consequent degradation of the measurements accuracy (shorter radial range, gaps, increasing uncertainty). Systematic interferences (human origin) have been reported mostly on 13.5 MHz systems, mainly during the afternoon. In some cases they can be avoided reducing and/or shifting the operating bandwidth. Occasional interferences seem to be related to environmental noise at different times during the day or to the ionosphere effect during the evenings (and especially in summer time).
Finally, it is worth noting that, from the information gathered in the survey, there are a number of well-established users of HFR data. In response to the question about which where the main users of the systems run by each of the institutions, 20 out of 23 chose at least one of the listed options, which involved different activity sectors (Figure 9). The most popular identified user is Academia, followed by European or National Maritime Safety Agencies and Weather Services. Some specific users were identified by Spanish operators: the Spanish Maritime Safety Agency (SASEMAR) and Ports Authorities. The number and diversity of users can be expected to grow if the number of systems with operational and available data grows. At the present moment, only 28% of the systems are connected directly or indirectly (through other national networks) to the European Data System—EMODnet Physics [see Section HFR Networks and Initiatives within the European Ocean Observing System (EOOS)]. Most significantly, the majority of the institutions whose systems are not connected are keen to connect to the European Data System in the future, provided suitable tools and guidance are made available.
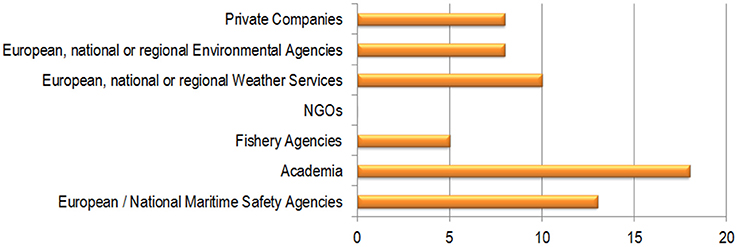
Figure 9. European HFR users identified by the surveyed institutions. Twenty out of 23 institutions operating HFRs chose at least one option among those displayed. Multiple choices were enabled, so one institution could identified more than one user.
HFR Networks and Initiatives within the European Ocean Observing System (EOOS)
In the past few years, several groups have been working at European level toward a coordinated development of the coastal HFR technology and its products, mainly based on the observation of surface ocean currents (Figure 10). This work is aligned with initiatives at international level, where the Group on Earth Observations (GEO) is coordinating international efforts to build a Global Earth Observation System of Systems (GEOSS) for exploiting the growing potential of Earth observations. Indeed, the GEO Work Plan 2012–2015 endorsed a task to plan a Global HFR Network for data sharing and delivery and to promote the proliferation of HFRs (Roarty et al., 2016).
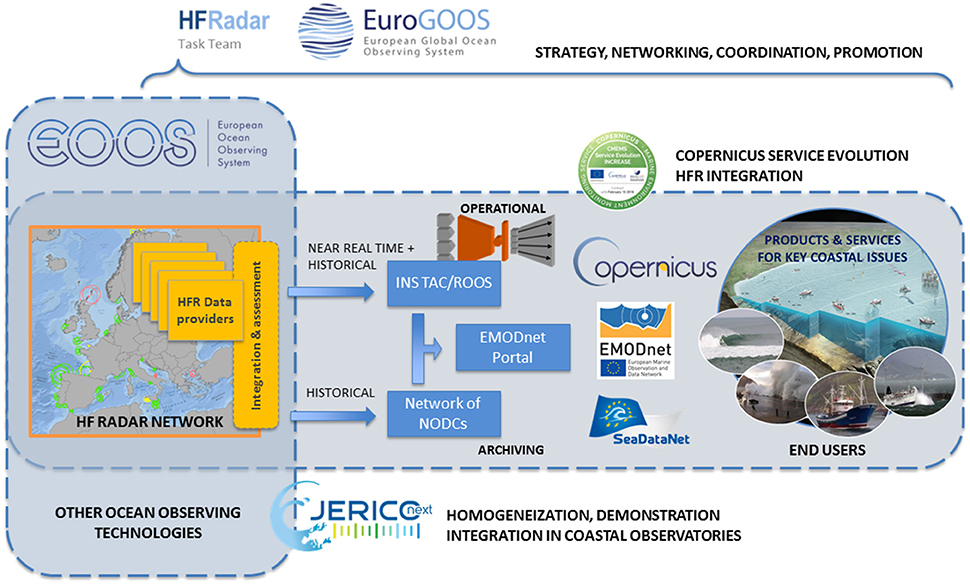
Figure 10. Schematic view of the different components of the European HF Radar network and initiatives within the EOOS.
The European ocean observing capacity is organized through a complex cluster of institutions, programs and initiatives. As a result, this capability, especially that concerning land-based or in situ observations, is highly fragmented. Those dispersed components vary in the degree of coordination or interaction between them and generally suffer from a lack of sustained funding. However, the European ocean observing community has identified the need for an inclusive, integrated, and sustained pan-European framework linking the currently disparate components. The establishment of the European Ocean Observing System (EOOS) will consist of a coordinating framework designed to align and integrate Europe's ocean observing capacity2.
One of the main actors in the European operational oceanography is EuroGOOS, which operates within the context of the Global Ocean Observing System of the Intergovernmental Oceanographic Commission of UNESCO (IOC GOOS). EuroGOOS brings together, in regional assemblies (ROOS), institutions from European countries providing operational oceanographic services and carrying out marine research. In 2015, EuroGOOS launched Ocean Observing Task Teams to organize and develop different ocean observation communities, and foster cooperation to meet the needs of the European Ocean Observing System (EOOS). Hence, the EuroGOOS HFR Task Team (HFR TT)3 was set up around the development and use of this coastal technology, in order to coordinate and join the technological, scientific and operational HFR communities at European level. The goal of the Task Team is to develop the European HFR network, contributing to the EOOS, and assist the standardization of HFR operations, data and applications, in coordination with international initiatives.
Other European infrastructures devoted to providing users with operational marine data and products at a pan-European level are: the European Marine Observation and Data network (EMODnet, Calewaert et al., 2016), the Copernicus Marine Environment Monitoring Service (CMEMS4) and the pan-European infrastructure for ocean and marine data management SeaDataNet5. In 2013, a pilot action coordinated by EMODnet Physics, with the support of the HFR TT, developed a strategy of assembling HFR metadata and data products within Europe in a uniform way to make them easily accessible, and more interoperable. EMODnet Physics proactively worked on HFR data stream management and it is now connected with 30 HFR sites6, presenting their data and data products in an organized and harmonized view, while data have different formats and QA/QC protocols at their origin.
In 2015, HFRs become part of the Joint European Research Infrastructure network for Coastal Observatory (JERICO)7. In the JERICO-NEXT (Novel European eXpertise for coastal observaTories) project (funded by the European Commission's H2020 Framework Program) several actions are dedicated to the harmonization of the procedures related to the HFRs data processing, correction, QA/QC and analysis. The efficient integration of HFR in the coastal observatories is one of the main objectives of this structuring European project. Based on these achievements, another ongoing European project, Innovation and Networking for the integration of Coastal Radars into European mArine SErvices (INCREASE) (CMEMS Service Evolution 2016), is building the tools for the integration of HFRs into CMEMS. Finally, the SeaDataCloud project, launched in 2016, will contribute to the integration and long term preservation of historical time series from HFR into the SeaDataNet infrastructure.
Other initiatives are gathering national or international expert teams working in common in a number of regions along the European coasts. In Italy, the Italian flagship project RITMARE8 has been focusing its efforts on the integration of the existing local observing systems, toward a unified operational Italian framework and on the harmonization of data collection and data management procedures (Serafino et al., 2012; Corgnati et al., 2015). In the Iberian Peninsula, the working group IBERORED HF9 is an inter-institutional network created with the objective of improving the visibility and exploitation of data generated by HFRs on Iberian Peninsula shores. IBERORED HF is presently working toward providing data through homogenized formats/protocols, in line with the HFR TT efforts and international initiatives. In Germany, HFR measurements taken in the German Bight are integrated into the pre-operational Coastal Observing System for Northern and Arctic Seas (COSYNA) system (Baschek et al., 2016), which includes a model-based forecasting capability.
Toward a Pan-European HFR Network
HFRs offer an unprecedented opportunity to take a step forward in the understanding of coastal ocean processes and transport mechanisms along the European coasts. Moreover, the progressive inclusion of HFR in European coastal observatories will stimulate applied research and transfer toward increasing applications of HFR in notable issues like the Marine Strategy Framework Directive (MSFD), the sustainable development of the Blue economy or the maritime safety. To reach the potential that this technology can offer to the European coastal operational oceanography, the HFR and EOOS communities need to elaborate a broad plan toward the establishment of a real and effective European HFR Network, in coherence with the existing initiatives at international levels.
One of the very first steps taken by the European HFR community is focused on the homogenization of HFR data and metadata formats and of QA/QC procedures. The main aim is to design and implement standards for data processing and mapping of product uncertainties following international recommendations for processing and calibration/correction. This activity, carried out in the framework of JERICO-NEXT, INCREASE, EMODnet, and the EuroGOOS HFR TT, is devoted to the identification of standards facilitating the consistent and valid semantic interpretation of information and data. These standards should ensure both efficient and automated data discovery and interoperability, with tools and services coherent with the long term goal of an international integration of the future European HFR network.
In parallel, the definition of a standard set of QA/QC procedures is in progress. The present state of the art is led by the activity of the US Integrated Ocean Observing System (IOOS), through the Quality Assurance/Quality Control of Real-Time Oceanographic Data (QARTOD) program (U.S. IOOS - Integrated Ocean Observing System, 2016). The next step for the European community will be to identify from this background the set of tests to be adopted as standard QC procedures for real-time HFR data. Further steps toward a HFR data network should be oriented toward contributing to unlocking access to data and to supporting and organizing data sharing under open data policies, following EuroGOOS Data Management, Exchange and Quality (DATAMEQ) Working Group recommendations10.This effort will also contribute to increase the application of HFR to different sectors, and promote this technology as crucial elements for coastal integrated management at the service of public authorities. In parallel, advanced signal processing is an open research line that can make evolve the robustness of HFR data (currents, waves and other) and, thus, increase the applications of this technology.
These improvements could be valuable, in particular, within the frame of CMEMS, fully committed to inform end-users and stakeholders about the quality and reliability of the marine forecast products routinely delivered, fostering downstream services and user uptake. Indeed, the integration of European HFR data into CMEMS is presently being discussed, and the procedure is being analyzed. HFR data could ultimately be incorporated in the In Situ Thematic Assembly Center of CMEMS, which gathers, homogenizes and quality-controls observational in situ data, provides an assessment of the quality of the products for users, and, if relevant, generates elaborated products (e.g., multi-sensor data products, derived from these observations). Incorporating HFR data in CMEMS and EMODnet would be useful for users in academia for the understanding of coastal ocean dynamics, including waves; for a homogenized operational monitoring of the coastal ocean along the European coasts; for downstream users and applications such as SAR operations, local sea circulation, fish management, oil-spill mitigation, off-shore structures management, ship routing etc. It should also be mentioned that in the near future the numerical modeling system for European seas implemented as part of CMEMS will, at least in some regions, provide spatial resolutions, which are comparable to HFR observations. HFR data could then also be used for the validation of numerical models of the ocean and, since other observations are already assimilated into this system, HFR data might also ultimately be assimilated in the models.
Another important need to be addressed through international collaboration is to coordinate the use of the limited radio frequency bands and protect them either from reciprocal HFRs radio interference or from unauthorized radio sources. As an example, the International Telecommunication Union has advised that the separation distances between a HFR and the border of other countries shall be greater than 80–270 km over land, and 200–920 km over sea depending on the frequency and noise levels, unless prior explicit agreements from affected administrations are obtained. This point is critical in Europe, where many countries share borders, and one important first coordination step is now in progress between national authorities and research groups of Spain, France and Italy, with the aim of defining a frequency sharing policy in the North Western Mediterranean. Since the presence of interference by unauthorized radio sources is common at certain frequencies, another priority is to coordinate the enforcement of the International Telecommunication Union frequency band allocation in each country.
Apart from the efforts focused on making the HFR technology and its applications progress, the development of HFR networks is essential for optimizing the sampling strategy of the coastal monitoring programs. The dynamic nature of the coastal zone requires improved temporal and spatial resolution and/or coverage of existing observing systems. Since HFR is currently offering unique time and spatial resolution for ocean surface current mapping from affordable investments, several European and international reports have emphasized the use of this technology to cover the needed requirements for ocean surface currents monitoring (e.g., IGOS, 2006; Le Traon and Pouliquen, 2010; Pascal et al., 2015). Primary challenges are to increase the density of observing systems by adding observation sites, and to deliver surface current fields and derived products from HFR, which need to be transitioned from research to operations.
Major advances in Earth monitoring are more efficiently earned through international cooperation. A surface current monitoring program in European coastal seas should be developed creating synergies between national efforts and promoting a common vision at this regional scale. This strategic regional approach is commonly used in Europe both for operational implementation (ROOS within EuroGOOS) and for resource management and conservation activities (Ecoregions, ICES, OSPAR). In addition, characteristics of the HFR technology like the space coverage and the need for building a network from different sites deployed along the coast, fully justify shared cross-boundary systems. Good examples are currently taking place between Spain and Portugal, Italy and France, Spain and France, Italy and Malta. An important step forward will be to promote a European approach in defining gaps and key priorities for future investments with common benefits in the different European seas. In this context, one of the aims of the JERICO-NEXT project is to propose a roadmap for the future observation of the European coast according to six scientific and societal topics, from the sensor to the data flow. Amongst these 6 topics one deals with coastal currents and transports estimation and includes as a key element the HFRs. This roadmap will build upon the returns of experiences led in and out of the JERICO-NEXT project, including proposal for a better harmonized and an improved quality of the HFR data and products. It will support and promote other initiatives and consortia willing to build a sustainable future for their systems. JERICO-NEXT is also willing to present a governance and/or organization schema for its future toward a sustained entity that could be integrated in a bigger one.
Finally, for reaching the necessary hydrodynamic and transport monitoring component of the environmental programs, integration with wider horizontal coverage from satellite and vertical coverage obtained from profilers (ADCPs in fixed stations or gliders) should accompany the development of the HFR network. In this sense, the ongoing research related to the extension of the surface information of HFRs to the sea interior or toward regional scales, in particular by association with other observational data and modeling results, will potentially open new grounds for HFR applications.
Author Contributions
AR, JM, LC, CM, AG, and AN: Contribution to the main structure and contents of all sections. Drafting, review and final approval of the submitted version. In addition, AR produced the figures on HFR current data and survey results, JM the map of HFR activity. JH and LW: Contribution to the main structure and contents, to Sections Basic Principles of HFR Operation and Data Specifications to HFR Networks and Initiatives within the European Ocean Observing System (EOOS). Drafting, review and final approval of the submitted version. LW and JH contributed with figures on HFR operation and applications of wave and discrete target data. CQ, JS, PL, EZ, VZ, and MH: Contribution to the main structure and contents, namely to Sections Basic Principles of HFR Operation and Data Specifications and Applications of HFR Measurements in the Framework of the European Coastal Integrated Management. Drafting, review and final approval of the submitted version. In addition VZ contributed with figure on MLD estimation from HFR and the related discussion on HFR applications. CQ made the table of HFR characteristics and contributed to the review of HFR signal processing. EZ provided the figure on Lagrangian estimations. PG, AM, IP, AN, and CF: Contribution to the main structure and contents, namely to Section HFR Networks and Initiatives within the European Ocean Observing System (EOOS) and Toward a Pan-European HFR Network. Drafting, review and final approval of the submitted version.
Conflict of Interest Statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The handling Editor declared a shared affiliation, though no other collaboration, with one of the authors CQ and states that the process nevertheless met the standards of a fair and objective review.
Acknowledgments
This work has been carried out as part of the Copernicus Marine Environment Monitoring Service (CMEMS) INCREASE project. CMEMS is implemented by Mercator Ocean in the framework of a delegation agreement with the European Union. In addition, the work has been partially supported by JERICO-NEXT (Joint European Research Infrastructure network for Coastal Observatory—Novel European eXpertise for coastal observaTories, H2020 Contract#654410) project and the European Marine Observations and Data Network—EMODnet Physics (MARE/2012/10 Lot 6 Physics—SI2.656795). The work of AR and JM was also supported by the Directorate of Emergency Attention and Meteorology of the Basque Government. The work of CNR-ISMAR was also partially supported by the Italian Flagship project RITMARE. The French contribution to this work was supported by Institut National des Sciences de l'Univers - Centre National de la Recherche Scientifique, program LEFE (Les Enveloppes Fluides et l'Environnement), project RenHFor. EZ was partly supported by the Parthenope University internal individual research grant (DR 727/2015). The HF radar-processing toolbox HFR_Progs use to produce OMA was provided by D. Kaplan, M. Cook, D. Atwater, and J. F. González. The inventory of the different HF radar systems operating in Europe was gathered thanks to the survey launched by the EuroGOOS HFR Task Team, in the framework of INCREASE and JERICO-NEXT projects. We are very grateful to all the people who kindly provided the information of their radar and related activities. We want to thank U. Martinez (AZTI) for her help with Figure 7 edition. This paper is contribution no. 806 from AZTI-Marine Research.
Abbreviations
BF, Beam Forming; CMEMS, Copernicus Marine Environment Monitoring Service; CODAR, Coastal Ocean Dynamics Application Radar; DATAMEQ, Data Management, Exchange and Quality; DF, Direction Finding; EOF, Empirical Orthogonal Fucntions; EOOS, European Ocean Observing System; ESFRI, European Strategy Forum on Research Infrastructures; GDOP, Geometric Dilution Of Precision; GDOSA, Geometrical Dilution Of Statistical Accuracy; GEO, Group on Earth Observations; GEOSS, Global Earth Observation System of Systems; HFR TT, HF Radar Task Team; HFR, High Frequency Radar; IBIROOS, Ireland-Biscay-Iberia Regional Operational Oceanographic System; ICES, International Council for the Exploration of the Sea; INCREASE, Innovation and Networking for the integration of Coastal Radars into EuropeAn marine Services; IOOS, Integrated Ocean Observing System; JERICO-NEXT, Joint European Research Infrastructure network for Coastal Observatory – Novel European eXpertise for coastal observaTories; MONGOOS, Mediterranean Operational Network for the Global Ocean Observing System; MSFD, Marine Strategy Framework Directive; MUSIC, Multiple Signal Classification; NOOS, North West European Shelf Operational Oceanographic System; OMA, Open-boundary Modal Analysis; QA/QC, Quality Assessment/Quality Control; QARTOD, Quality Assurance/Quality Control of Real-Time Oceanographic Data; ROOS, Regional Ocean Observing Systems; SAR, Search and Rescue; SASEMAR, Spanish Maritime Safety Agency; SNR, Signal to Noise Ratios; STP, Short Term Prediction; WERA, WavE Radar.
Footnotes
3. ^http://eurogoos.eu/high-frequency-radar-task-team/
4. ^http://marine.copernicus.eu/
5. ^http://www.seadatanet.org/
6. ^http://www.emodnet-physics.eu/map/
7. ^JERICO-RI, http://www.jerico-ri.eu.
10. ^http://eurogoos.eu/data-management-exchange-quality-working-group-data-meq
References
Abascal, A. J., Castanedo, S., Medina, R., Losada, I. J., and Álvarez-Fanjul, E. (2009). Application of HF radar currents to oil spill modelling. Mar. Pollut. Bull. 58, 238–248. doi: 10.1016/j.marpolbul.2008.09.020
Archer, M. R., Shay, L. K., Jaimes, B., and Martinez-Pedraja, J. (2015). “Observing frontal instabilities of the florida current using high frequency radar,” in Coastal Ocean Observing Systems, eds Y. Liu, H. Kerkering, and R. H. Weisberg (Boston, MA: Academic Press Elsevier), 179–208.
Ardhuin, F., Marie, L., Rascle, N., Forget, P., and Roland, A. (2009). Observation and estimation of lagrangian, stokes and eulerian currents induced by wind and waves at the sea surface. J. Phys. Oceanogr. 39, 2820–2838. doi: 10.1175/2009JPO4169.1
Barrick, D. E. (1972). First-order theory and analysis of MF/HF/VHF scatter from the sea. IEEE. Trans. Antenn. Propag. 20, 2–10. doi: 10.1109/tap.1972.1140123
Barrick, D. E., and Weber, B. L. (1977). On the nonlinear theory for gravity waves on the ocean's surface. Part II: interpretation and applications. J. Phys. Oceanogr. 7, 11–21. doi: 10.1175/1520-0485(1977)007<0011:OTNTFG>2.0.CO;2
Barrick, D. E. (1977). The ocean waveheight nondirectional spectrum from inversion of the HF sea-echo Doppler spectrum. Remote Sens. Environ. 6, 201–227. doi: 10.1016/0034-4257(77)90004-9
Barrick, D. E. (2002). Geometrical Dilution of Statistical Accuracy (GDOSA) in Multi-Static HF Radar Networks. Codar Ocean Sensors. Available online at: http://www.codaros.com/Manuals/SeaSonde/Docs/Informative/GDOSADefinition.pdf
Barrick, D. E., Fernandez, V., Ferrer, M. I., Whelan, C., and Breivik, A. (2012). A short-term predictive system for surface currents from a rapidly deployed coastal HF-Radar network. Ocean Dynam. 62, 725–740. doi: 10.1007/s10236-012-0521-0
Barth, A., Alvera-Azcárate, A., and Weisberg, R. H. (2008). Assimilation of high-frequency radar currents in a nested model of the West Florida Shelf. J. Geophys. Res. 113, C08033. doi: 10.1029/2007JC004585
Barth, A., Alvera-Azcárate, A., Beckers, J. M., Staneva, J., Stanev, E. V., and Schulz-Stellenfleth, J. (2011). Correcting surface winds by assimilating HFR surface currents in the German Bight. Ocean Dynam. 61, 599. doi: 10.1007/s10236-010-0369-0
Baschek, B., Schroeder, F., Brix, H., Riethmüller, R., Badewien, T. H., Breitbach, G., et al. (2016). The coastal observing system for northern and arctic seas (COSYNA). Ocean Sci. Discuss. 2016, 1–73. doi: 10.5194/os-2016-31
Bellomo, L., Griffa, A., Cosoli, S., Falco, P., Gerin, R., Iermano, I., et al. (2015). Toward an integrated HF radar network in the Mediterranean Sea to improve search and rescue and oil spill response: the TOSCA project experience. J. Oper. Oceanogr. 8, 95–107. doi: 10.1080/1755876X.2015.1087184
Berta, M., Ursella, L., Nencioli, F., Doglioli, A., Petrenko, A., and Cosoli, S. (2014a). Surface transport in the Northeastern Adriatic Sea from FSLE analysis of HF radar measurements. Cont. Shelf Res. 77, 14–23. doi: 10.1016/j.csr.2014.01.016
Berta, M., Bellomo, L., Magaldi, M. G., Griffa, A., Molcard, A., Marmain, J., et al. (2014b). Estimating Lagrangian transport blending drifters with HF radar data and models: results from the TOSCA experiment in the Ligurian Current (North Western Mediterranean Sea). Progr. Oceanogr. 128, 15–29. doi: 10.1016/j.pocean.2014.08.004
Breivik, O., and Saetra, O. (2001). Real time assimilation of HF radar currents into a coastal ocean model. J. Mar. Syst. 28, 161–182. doi: 10.1016/s0924-7963(01)00002-1
Broche, P., Forget, P., de Maistre, C., Devenon, J. L., and Crochet, M. (1987). VHF radar for ocean surface current and sea state remote sensing. Radio Sci. 22, 69–75. doi: 10.1029/RS022i001p00069
Brzezinski, M. A., and Washburn, L. (2011). Phytoplankton primary productivity in the Santa Barbara Channel: effects of wind-driven upwelling and mesoscale eddies. J. Geophys. Res. 116, C12013. doi: 10.1029/2011JC007397
Calewaert, J. B., Weaver, P., Gunn, V., Gorringe, P., and Novellino, A. (2016). “The European marine data and observation network (EMODnet): your gateway to european marine and coastal data,” in Quantitative Monitoring of the Underwater Environment: Results of the International Marine Science and Technology Event MOQESM14 in Brest, France, eds B. Zerr, L. Jaulin, V. Creuze, N. Debese, I. Quidu, B. Clement, and A. Billon-Coat (Cham: Springer International Publishing), 31–46.
Castanedo, S., Medina, R., Losada, I. J., Vidal, C., Méndez, F. J., Osorio, A., et al. (2006). The Prestige oil spill in Cantabria (Bay of Biscay). Part I: operational forecasting system for quick response, risk assessment and protection of natural resources. J. Coastal Res. 22, 1474–1489. doi: 10.2112/04-0364.1
Chapman, R. D., Shay, L., Graber, H., Edson, J., Karachintsev, A., Trump, C., et al. (1997). On the accuracy of HF radar surface current measurements: intercomparisons with ship-based sensors. J. Geophys. Res. Oceans 102, 18737–18748. doi: 10.1029/97jc00049
Cianelli, D., Falco, P., Iermano, I., Mozzillo, P., Uttieri, M., Buonocore, B., et al. (2015). Inshore/offshore water exchange in the Gulf of Naples. J. Mar. Syst. 145, 37–52. doi: 10.1016/j.jmarsys.2015.01.002
Corgnati, L., Mantovani, C., Griffa, A., Forneris, V., Tronconi, C., Santoleri, R., et al. (2015). The “RITMARE Italian coastal radar network: operational system and data interoperability framework,” in Proceedings of the 7th EuroGOOS Conference, 28-30 October 2014 (Lisbon).
Cosoli, S., Mazzoldi, A., and Gacic, M. (2010). Validation of surface current measurements in the Northern Adriatic Sea from high frequency radars. J. Atmos. Ocean. Technol. 27, 908–919. doi: 10.1175/2009jtecho680.1
Cosoli, S., Licer, M., Vodopivec, M., and Malacic, V. (2013). Surface circulation in the Gulf of Trieste (Northern Adriatic Sea) from radar, model, and ADCP comparisons. J. Geophys. Res. 118, 6183–6200. doi: 10.1002/2013jc009261
Crombie, D. D. (1955). Doppler spectrum of sea echo at 13.56 Mc/s. Nature 175, 681–682. doi: 10.1038/175681a0
Dzvonkovskaya, A., Gurgel, K. W., Rohling, H., and Schlick, T. (2008). “Low power high frequency surface wave radar application for ship detection and tracking,” in 2008 International Conference on Radar (Adelaide, SA), 627–632. doi: 10.1109/RADAR.2008.4653998
Falco, P., Buonocore, B., Cianelli, D., De Luca, L., Giordano, A., Iermano, I., et al. (2016). Dynamics and sea state in the Gulf of Naples: potential use of HF radar data in an operational oceanographic context. J. Oper. Oceanogr. 9, s33–s45. doi: 10.1080/1755876x.2015.1115633
Frolov, S., Paduan, J., Cook, M., and Bellingham, J. (2012). Improved statistical prediction of surface currents based on historic HF-radar observations. Ocean Dyn. 62, 1111. doi: 10.1007/s10236-012-0553-5
Forget, P. (2015). Noise properties of HF radar measurement of ocean surface currents. Radio Sci. 50, 1–14. doi: 10.1002/2015RS005681
Fujii, S., Heron, M. L., Kim, K., Lai, J.-W., Lee, S.-H., Wu, X., et al. (2013). An overview of developments and applications of oceanographic radar networks in Asia and Oceania countries. Ocean Sci. J. 48, 69–97. doi: 10.1007/s12601-013-0007-0
Gangopadhyay, A., Shen, C. Y., Marmorino, G. O., Mied, R. P., and Lindemann, G. J. (2005). An extended velocity projection method for estimating the subsurface current and density structure for coastal plume regions: an application to the Chesapeake Bay outflow plume. Cont. Shelf Res. 25, 1303–1319. doi: 10.1016/j.csr.2005.03.002
Gómez, R., Helzel, T., Petersen, L., Kniephoff, K., Merz, C. R., Liu, Y., et al. (2014). “Real-time quality control of current velocity data on individual grid cells in WERA HF radar,” in IEEE Oceans 2014 (Taipei), 1–7.
Graber, H. C., Haus, B. K., Chapman, R. D., and Shay, L. K. (1997). HF radar comparisons with moored estimates of current speed and direction: expected differences and implications. J. Geophys Res. 102, 18749–18766. doi: 10.1029/97JC01190
Green, J. J., and Wyatt, L. R. (2006). Row-action inversion of the Barrick-Weber equations. J. Atmos. Oceanic Techol. 23, 501–510. doi: 10.1175/JTECH1854.1
Grilli, S. T., Grosdidier, S., and Guérin, C.-A. (2015). Tsunami detection by high frequency radar beyond the continental shelf. I. Algorithms and validation on idealized case studies. Pure Appl. Geophys. 173, 3895–3934. doi: 10.1007/s00024-015-1193-8
Guihou, K., Marmain, J., Ourmieres, Y., Molcard, A., Zakardjian, B., and Forget, P. (2013). A case study of the mesoscale dynamics in the North-Western Mediterranean Sea: a combined data-model approach. Ocean Dyn. 63, 793–808. doi: 10.1007/s10236-013-0619-z
Gurgel, K.-W., Antonischki, G., Essen, H.-H., and Schlick, T. (1999). Wellen Radar WERA: a new ground-wave HF radar for ocean remote sensing. Coast. Eng. 37, 219–234. doi: 10.1016/S0378-3839(99)00027-7
Gurgel, K.-W., Essen, H.-H., and Schlick, T. (2006). An empirical method to derive ocean waves from second-order Bragg scattering: prospects and limitations. IEEE J. Oceanic Eng. 31, 804–811. doi: 10.1109/JOE.2006.886225
Gurgel, K. W., Dzvonkovskaya, A., Pohlmann, T., Schlick, T., and Gill, E. (2011). Simulation and detection of tsunami signatures in ocean surface currents measured by HF radar. Ocean Dyn. 61, 1495–1507. doi: 10.1007/s10236-011-0420-9
Hashimoto, N., and Tokuda, M. (1999). A Bayesian approach for estimating directional spectra with HF radar. Coast. Eng. J. 41, 137–149. doi: 10.1142/S0578563499000097
Heron, M., and Rose, R. (1986). On the application of HF ocean radar to the observation of temporal and spatial changes in wind direction. IEEE J. Oceanic Eng. 11, 210–218. doi: 10.1109/JOE.1986.1145173
Heron, M. L., and Atwater, D. P. (2013). Temporal and spatial resolution of HF ocean radars. Ocean Sci. J. 48, 99–103. doi: 10.1007/s12601-013-0008-z
Hisaki, Y. (1996). Nonlinear inversion of the integral equation to estimate ocean wave spectra from HF radar. Radio Sci. 31, 25–39. doi: 10.1029/95RS02439
Holden, G. J., and Wyatt, L. R. (1992). Extraction of sea state in shallow water using HF radar. IEE Proc. F 139, 175–181. doi: 10.1049/ip-f-2.1992.0021
Iermano, I., Moore, A. M., and Zambianchi, E. (2016). Impacts of a 4-dimensional variational data assimilation in a coastal ocean model of southern Tyrrhenian Sea. J. Mar. Syst. 154, 157–171. doi: 10.1016/j.jmarsys.2015.09.006
IGOS (2006). A Coastal Theme for the IGOS Partnership—for the Monitoring of Our Environment from Space and from Earth. Paris: UNESCO 2006. 60 pp. (IOC Information Document No. 1220).
Ivonin, D. V., Broche, P., Devenon, J.-L., and Shrira, V. I. (2004). Validation of HF radar probing of the vertical shear of surface currents by acoustic Doppler current profiler measurements. J. Geophys. Res. 109, C04003. doi: 10.1029/2003JC002025
Jordà, G., Sanchez-Roman, A., and Gomis, D. (2016). Reconstruction of transports through the Strait of Gibraltar from limited observations. Clim. Dynam. 1–15. doi: 10.1007/s00382-016-3113-8
Kalampokis, A., Uttieri, M., Poulain, P. M., and Zambianchi, E. (2016). Validation of HF radar-derived currents in the gulf of naples with lagrangian data. IEEE Geosci. Remote Sens. Lett. 13, 1452–1456. doi: 10.1109/LGRS.2016.2591258
Kaplan, D. M., Largier, J., and Botsford, L. W. (2005). HF radar observations of surface circulation off Bodega Bay (Northern California, USA). J. Geophys. Res. 110, C10020. doi: 10.1029/2005jc002959
Kaplan, D. M., and Lekien, F. (2007). Spatial interpolation and filtering of surface current data based on open-boundary modal analysis. J. Geophys. Res. Oceans 112:C12007. doi: 10.1029/2006JC003984
Kim, S. Y., Terrill, E. J., and Cornuelle, B. D. (2008). Mapping surface currents from HF radar radial velocity measurements using optimal interpolation. J. Geophys. Res. 113, C10023. doi: 10.1029/2007jc004244
Kim, S. Y., Terrill, E. J., and Cornuelle, B. D. (2009). Assessing coastal plumes in a region of multiple discharges: the U.S.–Mexico border. Environ. Sci. Technol. 43, 7450–7457. doi: 10.1021/es900775p
Kim, S. Y. (2010). Observations of submesoscale eddies using high-frequency radar-derived kinematic and dynamic quantities. Cont. Shelf Res. 30, 1639–1655. doi: 10.1016/j.csr.2010.06.011
Kirincich, A. R., de Paolo, T., and Terrill, E. (2012). Improving HF radar estimates of surface currents using signal quality metrics, with application to the MVCO high-resolution radar system. J. Atmos. Ocean. Technol. 29, 1377–1390. doi: 10.1175/jtech-d-11-00160.1
Kirincich, A. (2016). The occurrence, drivers, and implications of submesoscale eddies on the martha's vineyard inner shelf. J. Phys. Oceanogr. 46, 2645–2662. doi: 10.1175/jpo-d-15-0191.1
Kohut, J. T., and Glenn, S. M. (2003). Improving HF radar surface current measurements with measured antenna beam patterns. J. Atmos. Ocean. Technol. 20, 1303–1316. doi: 10.1175/1520-0426(2003)020<1303:IHRSCM>2.0.CO;2
Law, K. (2001). Measurements of Near Surface Ocean Currents Using HF Radar. Ph.D. thesis, University of California, Santa Cruz.
Le Traon, P. Y., and Pouliquen, S. (2010). Report of the EEA Workshop In situ Data Requirements for the GMES Marine Core Service, June 1-2, 2010 EEA. Copenhaguen.
Lipa, B. J. (1977). Derivation of directional ocean-wave spectra by inversion of second order radar echoes. Radio Sci. 12, 425–443. doi: 10.1029/RS012i003p00425
Lipa, B. (2013). “Uncertainties in SeaSonde current velocities,” in Proceedings of the IEEE/OES Seventh Working Conference on Current Measurement Technology. doi: 10.1109/CCM.2003.1194291
Lipa, B. J., and Barrick, D. E. (1983). Least-squares methods for the extraction of surface currents from CODAR crossed-loop data: application at ARSLOE. IEEE J. Oceanic Eng. 8, 1–28. doi: 10.1109/JOE.1983.1145578
Lipa, B. J., Barrick, D. E., Bourg, J., and Nyden, B. B. (2006). HF radar detection of tsunamis. J. Oceanogr. 62, 705. doi: 10.1007/s10872-006-0088-9
Lipa, B. J., and Barrick, D. E. (1986). Extraction of sea state from HF radar sea echo: mathematical theory and modelling. Radio Sci. 21, 81–100. doi: 10.1029/RS021i001p00081
Liu, Y., Weisberg, R., Merz, C., Lichtenwalner, S., and Kirkpatrick, G. (2010). HF radar performance in a low-energy environment: codar seasonde experience on the west florida shelf. J. Atmos. Oceanic Technol. 27, 1689–1710. doi: 10.1175/2010JTECHO720.1
Lorente, P., Piedracoba, S., Soto-Navarro, J., and Alvarez-Fanjul, E. (2014). Accuracy assessment of high frequency radar current measurements in the Strait of Gibraltar. J. Oper. Oceanogr. 7, 59–73. doi: 10.1080/1755876X.2014.11020300
Lorente, P., Piedracoba, S., Soto-Navarro, J., and Alvarez-Fanjul, E. (2015a). Evaluating the surface circulation in the Ebro delta (northeastern Spain) with quality-controlled high-frequency radar measurements. Ocean Sci. 11, 921–935. doi: 10.5194/os-11-921-2015
Lorente, P., Piedracoba, S., and Alvarez-Fanjul, E. (2015b). Validation of high-frequency radar ocean surface current observations in the NW of the Iberian Peninsula. Cont. Shelf Res. 92, 1–15. doi: 10.1016/j.csr.2014.11.001
Lorente, P., Piedracoba, S., Sotillo, M. G., Aznar, R., Amo-Baladrón, A., Pascual, A., et al. (2016). Ocean model skill assessment in the NW Mediterranean using multi-sensor data. J. Oper. Oceanogr. 9, 75–92. doi: 10.1080/1755876x.2016.1215224
Mader, J., Rubio, A., Asensio, J. L., Novellino, A., Alba, M., Corgnati, L., et al. (2016). The European HF Radar Inventory. EuroGOOS publications. Available online at: http://eurogoos.eu/download/publications/EU_HFRadar_inventory.pdf
Maresca, J. W., and Georges, T. M. (1980). Measuring RMS waveheight and the scalar ocean wave spectrum with HF skywave radar. J. Geophys. Res. C 85, 2759–2771. doi: 10.1029/JC085iC05p02759
Maresca, S., Braca, P., Horstmann, J., and Grasso, R. (2014). Maritime surveillance using multiple high-frequency surface-wave radars. IEEE Trans. Geosci. Remote Sens. 52, 5056–5071. doi: 10.1109/TGRS.2013.2286741
Marmain, J., Molcard, A., Forget, P., and Barth, A. (2014). Assimilation of HF radar surface currents to optimize forcing in the North Western Mediterranean sea. Nonlinear Process. Geophys. 21, 659–675. doi: 10.5194/npg-21-659-2014
Marmorino, G. O., Shen, C. Y., Evans, T. E., Lindemann, G. J., Hallock, Z. R., and Shay, L. K. (2004). Use of 'velocity projection' to estimate the variation of sea-surface height from HF Doppler radar current measurements. Cont. Shelf Res. 24, 353–374. doi: 10.1016/j.csr.2003.10.011
Menna, M., Mercatini, A., Uttieri, M., Buonocore, B., and Zambianchi, E. (2007). Wintertime transport processes in the Gulf of Naples investigated by HF radar measurements of surface currents. Nuovo Cimento. 30C, 605–622. doi: 10.1393/ncc/i2008-10270-0
Molcard, A., Poulain, P. M., Forget, P., Griffa, A., Barbin, Y., Gaggelli, J., et al. (2009). Comparison between VHF radar observations and data from drifter clusters in the Gulf of La Spezia (Mediterranean Sea). J. Mar. Syst. 78S, S79–S89. doi: 10.1016/j.jmarsys.2009.01.012
Nishimoto, M. M., and Washburn, L. (2002). Patterns of coastal eddy circulation and abundance of pelagic juvenile fish in the Santa Barbara Channel, California, USA. Mar. Ecol. Prog. Ser. 241, 183–199. doi: 10.3354/meps241183
O'Donncha, F., Hartnett, M., Nash, S., Ren, L., and Ragnoli, E. (2014). Characterizing observed circulation patterns within a bay using HF radar and numerical model simulations. J. Mar. Syst. 142, 96–110. doi: 10.1016/j.jmarsys.2014.10.004
Ohlmann, C., White, P., Washburn, L., Emery, B., Terrill, E., and Otero, M. (2007). Interpretation of coastal HF radar–derived surface currents with high-resolution drifter data. J. Atmos. Oceanic Technol. 24, 666–680. doi: 10.1175/JTECH1998.1
Orfila, A., Molcard, A., Sayol, J. M., Marmain, J., Bellomo, L., Quentin, C., et al. (2015). Empirical forecasting of HF-radar velocity using genetic algorithms. Geosci. Remote Sens. IEEE Trans. 53, 2875–2886. doi: 10.1109/TGRS.2014.2366294
Paduan, J. D., and Graber, H. C. (1997). Introduction to high-frequency radar: reality and myth. Oceanography 10, 36–39. doi: 10.5670/oceanog.1997.18
Paduan, J. D., and Rosenfeld, L. K. (1996). Remotely sensed surface currents in Monterey Bay from shore-based HF radar (Coastal Ocean Dynamics Application Radar). J. Geophys. Res. Oceans 101, 20669–20686. doi: 10.1029/96JC01663
Paduan, J. D., and Shulman, I. (2004). HFR data assimilation in the Monterey Bay area. J. Geophys. Res. 109, C07S09. doi: 10.1029/2003JC001949
Paduan, J. D., Kim, K. C., Cook, M. S., and Chavez, F. P. (2006). Calibration and validation of direction-finding high frequency radar ocean surface current observations. IEEE J. Ocean. Eng. 31, 862–875. doi: 10.1109/joe.2006.886195
Paduan, J. D., and Washburn, L. (2013). High-frequency radar observations of ocean surface currents. Annu. Rev. Mar. Sci. 5, 115–136. doi: 10.1146/annurev-marine-121211-172315
Parks, A. B., Shay, L. K., Johns, W. E., Martinez-Pedraja, J., and Gurge, K.-W. (2009). HF radar observations of small-scale surface current variability in the Straits of Florida. J. Geophys. Res. 114, C08002. doi: 10.1029/2008JC005025
Pascal, M., Krieger, M., Durand, D., Puillat, I., and Farcy, P. (2015). The Joint European Research Infrastructure Network for Coastal Observatories: Achievements and Strategy for the Future. Available online at: http://archimer.ifremer.fr/doc/00349/46022/.
Pascual, A., Lana, A., Troupin, C., Ruiz, S., Faugère, Y., Escudier, R., et al. (2015). Assessing SARAL/AltiKa delayed-time data in the coastal zone: comparisons with HFR observations. Mar. Geodesy. 38, 260–276. doi: 10.1080/01490419.2015.1019656
Ponsford, A. M., Sevgi, L., and Chan, H. C. (2001). An integrated maritime surveillance system based on high-frequency surface-wave radars. 2. Operational status and system performance. IEEE Antennas Propag. Mag. 43, 52–63. doi: 10.1109/74.979367
Ren, L., Nash, S., and Hartnett, M. (2015a). Observation and modelling of tide- and wind-induced surface currents at Galway Bay. Water Sci. Eng. 8, 345–352. doi: 10.1016/j.wse.2015.12.001
Ren, L., Nash, S., and Hartnett, M. (2015b). “Data Assimilation with high-frequency (HF) radar surface currents at a marine renewable energy test site,” in Renewable Energies Offshore, ed C. Guedes Soares (Leiden: CRC Press/Balkema), 189–193.
Roarty, H., Hazard, L., and Alvarez-Fanjul, E. (2016). Growing network of radar systems monitors ocean surface currents. EOS 97. doi: 10.1029/2016EO049243
Röhrs, J., Sperrevik, A. K., Christensen, K. H., Broström, G., and Breivik, A. (2015). Comparison of HF radar measurements with Eulerian and Lagrangian surface currents. Ocean Dyn. 65, 679. doi: 10.1007/s10236-015-0828-8
Rubio, A., Reverdin, G., Fontán, A., González, M., and Mader, J. (2011). Mapping near-inertial variability in the SE Bay of Biscay from HF radar data and two offshore moored buoys. Geophys. Res. Lett. 38, L19607. doi: 10.1029/2011GL048783
Schaeffer, A., Molcard, A., Forget, P., Fraunié, P., and Garreau, P. (2011). Generation mechanism of mesoscale eddy in the Gulf of Lions: radar observation and modelling. Ocean Dyn. 61, 1587–1609. doi: 10.1007/s10236-011-0482-8
Schmidt, R. O. (1986). Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 34, 276–280. doi: 10.1109/TAP.1986.1143830
Schulz-Stellenfleth, J., and Stanev, E. V. (2016). Analysis of the upscaling problem - a case study for the barotropic dynamics in the north sea and the german bight. Ocean Model. 100, 109–124. doi: 10.1016/j.ocemod.2016.02.002
Sentchev, A., Forget, P., Barbin, Y., and Yaremchuk, M. (2013). Surface circulation in the Iroise Sea (W. Brittany) from high resolution HF radar mapping. J. Mar. Syst. 109–110, S153–S168. doi: 10.1016/j.jmarsys.2011.11.024
Serafino, F., Lugni, C., Ludeno, G., Arturi, D., Uttieri, M., Buonocore, B., et al. (2012). REMOCEAN: a flexible X-band radar system for seastate monitoring and surface current estimation. IEEE Geosci. Remote Sens. Lett. 9, 822–826. doi: 10.1109/LGRS.2011.2182031
Shay, L. K., Cook, T. M., Haus, B. K., Martinez, J., Peters, H., Mariano, A. J., et al. (2000). VHF radar detects oceanic submesoscale vortex along Florida Coast. Eos Trans. AGU, 81, 209–213. doi: 10.1029/00EO00143
Shen, C. Y., and Evans, T. E. (2002). Dynamically constrained projection for subsurface current velocity. J. Geophys. Res. 107, 3203. doi: 10.1029/2001JC001036
Shen, W., Gurgel, K. W., Voulgaris, G., Schlick, T., and Stammer, D. (2012). Wind-speed inversion from HF radar first-order backscatter signal. Ocean Dyn. 62, 105–121. doi: 10.1007/s10236-011-0465-9
Shrira, V. I., and Forget, P. (2015). On the nature of near-inertial oscillations in the uppermost part of the ocean and a possible route toward HF radar probing of stratification. J. Phys. Oceanogr. 45, 2660–2678. doi: 10.1175/jpo-d-14-0247.1
Shrira, V. I., Ivonin, D. V., Broche, P., and de Maistre, J. C. (2001). On remote sensing of vertical shear of ocean surface currents by means of a single-frequency VHF radar. Geophys. Res. Lett. 28, 3955–3958. doi: 10.1029/2001gl013387
Siddons, L. A., Wyatt, L. R., and Wolf, J. (2009). Assimilation of HF radar data into the Swan wave model. J. Mar. Syst. 77, 312–324. doi: 10.1016/j.jmarsys.2007.12.017
Solabarrieta, L., Rubio, A., Castanedo, S., Medina, R., Fontán, A., González, M., et al. (2014). Surface water circulation patterns in the southeastern Bay of Biscay: new evidences from HF radar data. Cont. Shelf Res. 74, 60–76. doi: 10.1016/j.csr.2013.11.022
Solabarrieta, L., Frolov, S., Cook, M., Paduan, J., Rubio, A., González, M., et al. (2016). Skill assessment of HF radar-derived products for lagrangian simulations in the Bay of Biscay. J. Atmos. Oceanic Technol. 33, 2585–2597. doi: 10.1175/jtech-d-16-0045.1
Sperrevik, A. K., Christensen, K. H., and Röhrs, J. (2015). Constraining energetic slope currents through assimilation of high-frequency radar observations. Ocean Sci. 11, 237–249. doi: 10.5194/os-11-237-2015
Stanev, E. V., Ziemer, F., Schulz-Stellenfleth, J., Seemann, J., Staneva, J., and Gurgel, K.-W. (2015). Blending surface currents from HF radar observations and numerical modeling: tidal hindcasts and forecasts. J. Atmos. Oceanic Technol. 32, 256–281. doi: 10.1175/jtech-d-13-00164.1
Staneva, J., Wahle, K., Günther, H., and Stanev, E. (2016). Coupling of wave and circulation models in coastal–ocean predicting systems: a case study for the german bight. Ocean Sci. 12, 797–806. doi: 10.5194/os-12-797-2016
Stewart, R. H., and Joy, J. W. (1974). HF radio measurements of surface currents. Deep Sea Res. 21, 1039–1049. doi: 10.1016/0011-7471(74)90066-7
Teague, C., Vesecky, J. F., and Hallock, Z. R. (2001). A comparison of multifrequency HF radar and ADCP measurements of near-surface currents during COPE-3. IEEE J. Ocean. Eng. 26, 399–405. doi: 10.1109/48.946513
Troupin, C., Pascual, A., Valladeau, G., Pujol, I., Lana, A., Heslop, E., et al. (2015). Illustration of the emerging capabilities of SARAL/AltiKa in the coastal zone using a multi-platform approach. Adv. Space Res. 55, 51–59. doi: 10.1016/j.asr.2014.09.011
Ullman, D. S., O'Donnell, J., Kohut, J., Fake, T., and Allen, A. (2006). Trajectory prediction using HF radar surface currents: Monte Carlo simulations of prediction uncertainties. J. Geophys. Res. Ocean. 111:C12005. doi: 10.1029/2006jc003715
U.S. IOOS - Integrated Ocean Observing System (2016). Manual for Real-Time Quality Control of High Frequency Radar Surface Currents Data: A Guide to Quality Control and Quality Assurance of High Frequency Radar Surface Currents Data Observations (Silver Spring, MD: NOAA U.S. Integrated Ocean Observing System Program). Available online at: https://ioos.noaa.gov/project/qartod/#manuals
Uttieri, M., Cianelli, D., Buongiorno Nardelli, B., Buonocore, B., Falco, P., Colella, S., et al. (2011). Multiplatform observation of the surface circulation in the Gulf of Naples (Southern Tyrrhenian Sea). Ocean Dyn. 61, 779–796. doi: 10.1007/s10236-011-0401-z
Vilibić, I., Šepić, J., Mihanović, H., Kalinić, H., Cosoli, S., Janeković, I., et al. (2016). Self-Organizing Maps-based ocean currents forecasting system. Sci. Rep. 6:22924. doi: 10.1038/srep22924
Wahle, K., and Stanev, E. V. (2011). Consistency and complementarity of different coastal ocean observations, a neural network-based analysis for the german bight. Geophys. Res. Lett. 38, 1–4. doi: 10.1029/2011gl047070
Wang, W., Forget, P., and Guan, C. (2016). Inversion and assessment of swell wave heights from HF radar spectra in the Iroise Sea. Ocean Dyn. 66, 527–538. doi: 10.1007/s10236-016-0941-3
Waters, J., Wyatt, L. R., Wolf, J., and Hines, A. (2013). Data assimilation of partitioned HF radar wave data into Wavewatch III. Ocean Model. 72, 17–31. doi: 10.1016/j.ocemod.2013.07.003
Willis, Z. (2015). “National ocean observing systems in a global context,” in Coastal Ocean Observing Systems, eds Y. Liu, H. Kerkering, and R. H. Weisberg (Boston, MA: Academic Press Elsevier), 11–25.
Wyatt, L. R. (1990). A relaxation method for integral inversion applied to HF radar measurement of the ocean wave directional spectrum. Int. J. Remote Sens. 11, 1481–1494. doi: 10.1080/01431169008955106
Wyatt, L. R., Ledgard, L. J., and Anderson, C.W. (1997). Maximum likelihood estimation of the directional distribution of 0.53 Hz ocean waves. J. Atmos. Oceanic Technol. 14, 591–603. doi: 10.1175/1520-0426(1997)014<0591:MLEOTD>2.0.CO;2
Wyatt, L. R. (2002). An evaluation of wave parameters measured using a single HF radar system. Can. J. Remote Sens. 28, 205–218. doi: 10.5589/m02-018
Wyatt, L. R., Green, J. J., Gurgel, K.-W., Nieto Borge, J. C., Reichert, K., Hessner, K., et al. (2003). Validation and intercomparisons of wave measurements and models during the EuroROSE experiments. Coast. Eng. 48, 1–28. doi: 10.1016/S0378-3839(02)00157-6
Wyatt, L. R., Liakhovetski, G., Graber, H., and Haus, B. (2005). Factors affecting the accuracy of HF radar wave measurements. J. Atmos. Oceanic Technol. 22, 844–856. doi: 10.1175/jtech1728.1
Wyatt, L. R., Green, J. J., Middleditch, A., Moorhead, M. D., Howarth, J., Holt, M., et al. (2006). Operational wave, current and wind measurements with the Pisces HFR. IEEE J. Ocean Eng. 31, 819–834. doi: 10.1109/JOE.2006.888378
Wyatt, L. R. (2012). Shortwave direction and spreading measured with HF radar. J. Atmos. Oceanic Technol. 29, 286–299. doi: 10.1175/JTECH-D-11-00096.1
Wyatt, L. R. (2014). High frequency radar applications in coastal monitoring, planning and engineering. Aust. J. Civil Eng. 12:1. doi: 10.7158/C13-023.2014.12.1
Wyatt, L. R. (2015). “Improving the quality control and accuracy of HF radar currents,” in IEEE Oceans 2015 (Genova).
Yaremchuk, M., and Sentchev, A. (2011). A combined EOF/variational approach for mapping radar-derived sea surface currents. Cont. Shelf Res. 31, 758–768. doi: 10.1016/j.csr.2011.01.009
Keywords: high frequency radar, operational oceanography, coastal observing systems, radar remote sensing, surface currents, surface waves, model assessment, data assimilation
Citation: Rubio A, Mader J, Corgnati L, Mantovani C, Griffa A, Novellino A, Quentin C, Wyatt L, Schulz-Stellenfleth J, Horstmann J, Lorente P, Zambianchi E, Hartnett M, Fernandes C, Zervakis V, Gorringe P, Melet A and Puillat I (2017) HF Radar Activity in European Coastal Seas: Next Steps toward a Pan-European HF Radar Network. Front. Mar. Sci. 4:8. doi: 10.3389/fmars.2017.00008
Received: 30 September 2016; Accepted: 09 January 2017;
Published: 20 January 2017.
Edited by:
Hervé Claustre, Centre National de la Recherche Scientifique, FranceReviewed by:
Fabien Roquet, Stockholm University, SwedenAnanda Pascual, Spanish National Research Council, Spain
Copyright © 2017 Rubio, Mader, Corgnati, Mantovani, Griffa, Novellino, Quentin, Wyatt, Schulz-Stellenfleth, Horstmann, Lorente, Zambianchi, Hartnett, Fernandes, Zervakis, Gorringe, Melet and Puillat. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) or licensor are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Anna Rubio, YXJ1YmlvQGF6dGkuZXM=