Abstract
Autonomous platforms already make observations over a wide range of temporal and spatial scales, measuring salinity, temperature, nitrate, pressure, oxygen, biomass, and many other parameters. However, the observations are not comprehensive. Future autonomous systems need to be more affordable, more modular, more capable and easier to operate. Creative new types of platforms and new compact, low power, calibrated and stable sensors are under development to expand autonomous observations. Communications and recharging need bandwidth and power which can be supplied by standardized docking stations. In situ power generation will also extend endurance for many types of autonomous platforms, particularly autonomous surface vehicles. Standardized communications will improve ease of use, interoperability, and enable coordinated behaviors. Improved autonomy and communications will enable adaptive networks of autonomous platforms. Improvements in autonomy will have three aspects: hardware, control, and operations. As sensors and platforms have more onboard processing capability and energy capacity, more measurements become possible. Control systems and software will have the capability to address more complex states and sophisticated reactions to sensor inputs, which allows the platform to handle a wider variety of circumstances without direct operator control. Operational autonomy is increased by reducing operating costs. To maximize the potential of autonomous observations, new standards and best practices are needed. In some applications, focus on common platforms and volume purchases could lead to significant cost reductions. Cost reductions could enable order-of-magnitude increases in platform operations and increase sampling resolution for a given level of investment. Energy harvesting technologies should be integral to the system design, for sensors, platforms, vehicles, and docking stations. Connections are needed between the marine energy and ocean observing communities to coordinate among funding sources, researchers, and end users. Regional teams should work with global organizations such as IOC/GOOS in governance development. International networks such as emerging glider operations (EGO) should also provide a forum for addressing governance. Networks of multiple vehicles can improve operational efficiencies and transform operational patterns. There is a need to develop operational architectures at regional and global scales to provide a backbone for active networking of autonomous platforms.
Introduction
In situ ocean observing is limited by the ability of humans to make comprehensive observations in many locations due to the remoteness, harshness, and sheer geographic dimensions of the ocean environment. In addition, the temporal scales cover many decades from seconds to years (Delory and Pearlman, 2018). In situ data with enough spatial and temporal resolution are needed for science to assist with resource stewardship and environmental management decisions that have wide social and economic impact (National Science and Technology Council, 2018). Knowledge gathering is limited by our ability to accomplish and sustain comprehensive observations in the ocean environment. Unmanned, autonomous, and remote sensing platforms are important tools to make the necessary observations possible. Application of these in situ observing capabilities must be done in a comprehensive manner, integrated with other elements of an ocean observing system, including satellite remote sensing and models. There are many tradeoffs among platforms when defining an observing mission. The trade-offs must take into account both science needs and societal needs; the United Nations Sustainable Development Goals (SDGs, United Nations, 2015) can help understand science and social needs. Quantifying the targets and indicators for the SDGs represent a global challenge for the science community to simultaneously enhance understanding of the oceans and to inform decision-making processes. Ocean observations and ocean science are a key to a sustainable future (Visbeck, 2018). The Framework of Ocean Observing (FOO, Lindstrom et al., 2012) uses requirement drivers, technology maturity, and societal impact to identify essential ocean variables (EOVs). Autonomous platforms already provide key observations for some EOVs. Further advances are now required in autonomous systems to meet the growing needs for ocean observing in biology (Boss et al., 2018; Lombard et al., 2019), biogeochemistry and ecology (Bange et al., 2019; Fennel et al., 2019; Jamet et al., 2019; Tilbrook et al., 2019), sea floor mapping (Wölfl et al., 2019), the deep ocean (Levin et al., 2019), the Arctic (Lee et al., 2017), and the increasing requirements for real-time data (Zappalà et al., 2016). New observation technologies and techniques will advance our understanding of the science and also address societal issues such as management of the energy, ecosystems, and raw materials of the ocean, and the ocean’s impact on climate, weather, and food security.
To take the next steps in observing, we need more sustained and comprehensive measurements across spatial and temporal scales, and synoptic measurements across multiple scales. Information gaps occur in the deep ocean and under ice (Lee et al., 2017). There is still a vast need for better seabed mapping1 (Mayer et al., 2018). Multiple anthropogenic impacts in ecosystem issues such as plastic debris are not quantified (Maximenko et al., 2019) as well as tracking of animal movement and migration. We need reduced data latency for things like biodiversity observations (Muller-Karger et al., 2018). Reduced data latency is also important for coastal water quality monitoring for environmental enforcement, for mitigating human impacts on marine animals such as endangered species in shipping lanes, and more efficient environmental management such as setting more optimal fisheries opening times and quotas. We need better, faster observations of transient events like harmful algal blooms (Anderson et al., 2019), tsunamis, underwater volcano eruptions, and gas hydrate plumes (Manalang et al., 2018).
Ship-based in situ ocean observations are increasingly limited by the cost of operating platforms that support the humans and instruments for detailed measurements (National Research Council, 2009). In addition, ship-based and manned submersible monitoring is limited in temporal and spatial coverage; however, ships provide great flexibility and are essential for servicing buoys and cabled observatories. Scuba diving offers limited reach into the ocean and is relatively risky. Remotely Operated Vehicles (ROVs) enable observations in more difficult environments at less risk to humans. ROVs are widely used in industry and military,2 but they still require expensive platforms and human presence, and are, therefore, constrained to short-term operations in favorable weather conditions. Cabled observatories, which have the advantage of continuous operation and large power and bandwidth capabilities, are a valuable but expensive alternative for sustained observations and generally have limited geographic coverage. Moorings can be deployed in a wider range of locations with lower initial cost than fixed observatories but have telemetry limitations and high maintenance costs.
Unmanned Underwater Vehicles (UUVs) and Unmanned Surface Vehicles (USVs) are remotely operated platforms that allow more temporal and spatial coverage of measurements and sometimes lower cost, but they still depend on high-bandwidth communications or nearby manned support platforms for near-real-time control. Some platforms incorporate internal automatic control to increase mission times and reduce communication bandwidth or operational costs. These programmable, robotic vehicles have become known as Autonomous Surface Vehicles (ASVs) or Autonomous Underwater Vehicles (AUVs). ASVs and AUVs still communicate with operators through radio, satellite, or underwater acoustic signals, but their distinguishing characteristic is that they do not need humans to control them in real-time.
The early vision for autonomous platforms for ocean observations came from Stommel (1989) and Curtin et al. (1993), who envisioned large numbers of autonomous vehicles supporting comprehensive observations of the oceans. Curtin proposed that ocean observing is an integrated process of many different types of assets including vehicles and floats. The vision of the 1990s has evolved into modern capabilities. The Argo network (Jayne et al., 2017; Roemmich et al., 2019) has demonstrated the value of long-endurance autonomous platforms.
Autonomous Underwater Vehicles offer a real revolution in the marine technology field. They have become tools for solving a “wide range of issues in many theoretical and practical fields” (Gafurov and Klochkov, 2015). They have advanced in their payload capacity, computational capabilities, communication capabilities, and autonomy (Rudnick, 2016; Lee and Rudnick, 2018). Modular and reconfigurable systems will improve AUV flexibility and scalability. Increasing autonomy is a focus in the AUV community (Brito et al., 2019). Most current autonomous platforms operate, sample, and navigate according to a pre-programmed mission and in general are operated with some human ‘supervision.’ Only recently have such vehicles been deployed in fully autonomous mode. It is intended that future advanced autonomous platforms will be capable of adapting their parameters and algorithms, and they may choose actions or behaviors based on prior information or real-time collected data, to achieve a predetermined goal.
Intelligent platforms are only one part of a future vision. On-board sensing systems also play an important role (Delory and Pearlman, 2018). Mature sensors such as Conductivity, Temperature, and Depth (CTDs) are being fitted on a wider range of autonomous platforms. Optical imaging systems are becoming smaller and more efficient. A wide variety of optical sensors are available for biogeochemical measurements such as dissolved oxygen, alkalinity, and photosynthetically available radiation. Sensors are also available for biological measurements such as plankton monitoring. Active acoustic systems, such as multibeam, side-scan and sub-bottom sonars support hydrographic operations, biological and biomass studies, and subsea geological studies, while passive acoustic systems, including hydrophone arrays, have supported extensive work in mammal and fisheries research. There are still many types of sensors that cannot be fitted to platforms whose objective is to have endurance of months or years. The primary challenges for sensors lie in power consumption, size and stability over time (including issues of biofouling). Biological and biogeochemical sensors have posed the greatest difficulty.
Wave propulsion, variable buoyancy systems, and autonomous sailing have vastly extended the range of some types of platforms. Subsurface ocean observation and exploration remain fundamentally constrained by energy availability for propulsion, communication, and sensors. This energy bottleneck similarly limits real-time processing for autonomous systems and can be exacerbated by computationally intensive machine learning algorithms. Systems that can convert subsurface waves and currents to electrical power could play a significant role in meeting the energy needs of the next generation in autonomous technologies (Ayers and Richter, 2016).
This paper will look at the current state of the art and then address future visions for ocean observation and exploration using autonomous systems.
Current State of the Art
Using the model of the Framework of Ocean Observing (FOO, Lindstrom et al., 2012), directions for advanced ocean observing are driven by societal requirements matched with observing system capabilities and maturity. Thus, the current state of the art forms a foundation for both the near-term missions and the vision for the next decade. Figure 1 depicts some of the many elements of such systems. In situ sensing needs to be driven by specific requirements defined by ocean resource users, including industry, government and researchers who use ocean information. These needs span a full range of scales from global to local process studies, such as productivity of aquaculture and fisheries, management for sustainability or disaster mitigation. These all want more persistent, comprehensive coverage in time and space, with more temporal and spatial resolution than presently possible. This is a natural fit with the evolving autonomous system capabilities.
FIGURE 1

A depiction of the many autonomous and remote sensing platforms that comprise an ocean observation system (source: Glynn Gorick and the NeXOS project).
Standards and Best Practices
With the scales of the oceans, an important step forward for autonomous vehicles (and for the whole of ocean observing) is to have significantly improved interoperability of sensors, systems and data. Increased cooperation across system elements was noted as a benefit of GOOS and an important aspect in planning for the next decade (Tanhua et al., 2019). It has also been recognized that standards and best practice methodologies support interoperability and reproducibility. These methodologies make it easier to operate efficiently, share results and leverage existing data. Standards and best practices should be readily available and encouraged for broad adoption in ocean observing including autonomous vehicles. New capabilities should conform to current standards and best practices where possible or systematically develop new ones where needed as part of routine operating procedures. With the role that they can play in the coming decade, this section on standards and best practices was included in our review and vision of autonomous vehicles.
Best practices and standards are the two most common forms of documenting methods. They are part of a continuum of community agreements (Pulsifer et al., 2019). Best practices, in the way we use them in this paper, are descriptions of methods, generally originated bottom-up by individual organizations, that are widely adopted. They can come in many forms such as “standard operating procedures,” manuals or guides. The definition of a best practice for ocean observing is: “a best practice is a methodology that has repeatedly produced superior results relative to other methodologies with the same objective; to be fully elevated to a best practice, a promising method will have been adopted and employed by multiple organizations” (Simpson et al., 2018). This definition is like that used in other fields for best practices (Bretschneider et al., 2005). They all have the objective of improving the quality and consistency of processes, measurements, data and applications. The identification of a “best practice” is not easy and may engender controversy. Two options are under consideration for such a designation. Either broad uptake (multiple organizations) or recognition by an expert peer panel. In either case, the term “fit for purpose” must be acknowledged as what is best for one objective (e.g., tropical arrays) may not be best in another environment (e.g., Arctic under ice monitoring) (Simpson et al., 2019).
Standards have the same objectives as best practices; the difference is that standards may serve as benchmarks for evaluation in addition to being processes. Also, they are generally top-down and may become mandatory legislated standards, such as the European INSPIRE3 legislation. The International Standards Organization (ISO) defines standards as “documents of requirements, specifications, guidelines or characteristics that can be used consistently to ensure that materials, products, processes and services are fit for their purpose.” The time for the formation of a standard by a Standards Development Organization (SDO) is 3–5 years or more using formal working groups to write the standard.
Best practices can address the elements that make up the flow from observations to applications. This flow is called the “value chain” for ocean observing, which derives from the original work of Porter (1985). Ideally, the best practices for each of the value chain elements have defined interfaces so that they can be linked.
An example of such linking is seen in recent Open GeoSpatial Consortium (OGC) standards for describing, connecting, and controlling sensor networks. Standards such as OGC’s Sensor Markup Language, Sensor Planning Service, Sensor Web Enablement, and SensorThings4 all support this emerging trend. However, human contributions will not be entirely replaced, as there are elements of quality assurance and data integration into both models and products that will need human participation. For both machines and humans, there is a need for defined methodologies in the form of best practices and standards (Pearlman et al., 2019).
For ocean observing, a sustained Ocean Best Practices System has been implemented to make methods readily available to support sensor and platform applications, as well as other elements of the end-to-end value chain of ocean observing (Pearlman J. S. et al., 2017).
Sensors
The heart of any observation system is its sensors. The variety of sensors used on autonomous platforms has been growing for more than two decades (Schofield et al., 2010; Tintoré et al., 2013; Marques et al., 2018; Testor et al., 2018). These capabilities are driven by the need to characterize the ocean comprehensively and in near real-time (Zappalà et al., 2016). Choosing sensors for a mission is not always straightforward. Sensor systems can have different maturities, form factors, power requirements, and trade-offs between accuracy, resolution, stability, and sampling frequency.
This paper focuses on sensor technologies that have matured recently or are still maturing in autonomous vehicles applications. Sensors that have reached a high level of maturity—or a high Technology Readiness Level (TRL, Mankins, 1995)—are covered in less detail. There are important physical oceanographic sensors that are at a high TRL, such as CTD sensors, active acoustic sensors, and several optical sensing techniques for chemical compounds. The optical sensors increasingly use integrated light-emitting diodes (LEDs), lasers, and optical spectrometry technologies. Conversely, most sensors for biogeochemistry and biological compounds are at a lower TRL. Biogeochemical sensors (BGC) are used on some autonomous platforms such as gliders and profiling floats, and there is a new BGC component to the Argo program (Johnson and Claustre, 2016). More sophisticated BGC sensors for nutrients, such as Lab-on-Chip, are not ready for routine operations. Biological sensors are less mature than BGCs, but they offer opportunities for significant advancement.
Physical Oceanographic Sensors
Conductivity, temperature, and depth sensors have been in use for many decades, suspended on mooring lines, mounted to ship-board rosettes, and integrated into AUVs. The salinity calculation (McDougall et al., 2009) is important for deriving water density and is heavily dependent on concurrent pressure and temperature. Physical water-transport lags between sensors can create errors in profiling floats or gliders moving at speeds of 0.5 m/s in the presence of sharp vertical temperature gradients (Garau et al., 2011). Sensors on autonomous platforms can also measure physical variables, such as current velocity. Acoustic Doppler Current Profilers (ADCP) are widely used on research vessels, moorings, and more recently on AUVs including gliders (Thurnherr et al., 2015) although they are not routinely installed on gliders because of power requirements and data processing challenges (Hall et al., 2019).
Autonomous Underwater Vehicles have been fitted with multi-beam echosounders, sidescan sonars, and sub-bottom profilers (Nakamura et al., 2013; Thompson et al., 2015; Blomberg et al., 2017). The weight and power requirements of these sensors demand large AUVs that have short endurance and require research vessel support, but they have still proven the concept of automating some survey applications. Better navigation, positioning, and geo-referencing is needed for some high-resolution surveys to be completed with autonomous systems instead of survey vessels (Kunde et al., 2018).
Biogeochemical Sensors
Optical sensing also addresses biogeochemical parameters in the marine environment (Moore et al., 2009). There are many types and many applications of optical sensors for chemistry and biology. Nutrient cycles (nitrate, phosphate, and silicate) participate in carbon dioxide (CO2) sequestration in the ocean and are linked with the global carbon cycle. Observing their concentration in the open and coastal ocean will allow us to better understand the major biogeochemical cycles.
The optode sensor is now commonly used to measure oxygen (Bittig et al., 2015, 2018) and there is also work to further extend these sensors to measure CO2 (Atamanchuk et al., 2014; deYoung et al., 2018). These sensors are small, operate at low power and have good stability for multi-year deployments. The stability characteristics for the CO2 version of the sensors have yet to be demonstrated. Another approach to measuring CO2 is through pH, which requires some knowledge of how alkalinity relates to CO2 but avoids direct measurement of CO2. The development of pH sensors was stimulated by the Schmidt X Prize (Okazaki et al., 2017) with the result that there are now pH sensors ready for deployment on Argo Floats (Xing et al., 2018) and testing is underway for operation of pH sensors on underwater gliders (Saba et al., 2018).
Colorimetric detection is a method of determining the concentration of a chemical element or compound in a solution using a color reagent. The most widely used method to detect nutrients is based on colorimetric detection using traditional, discrete shipboard-sampling techniques and onboard analyses (Ma et al., 2014). Over the past decade, significant progress has been made in developing in situ nutrient sensors, and a few are commercially available to measure nitrates, phosphates, and silicates (Legiret et al., 2013; Worsfold et al., 2016). For autonomous operations, using reagents introduces challenges. The reagents must be replenished regularly, their stability is of concern, their cross calibration with standards needs to be done, and they have potential limitations from chemical interferences and refractive effects (McKelvie et al., 1997). Optical sensors can also measure alkalinity (pH), using a pH-sensitive dye and a wide-band emission LED. The technique is straight forward but sensitive to temperature, which can cause significant errors if the seawater temperature differs significantly from that of the sample container. Automated sensors have been demonstrated on the NeXOS project (Pearlman J. et al., 2017) and others. However, the sensor design for autonomous platforms with low power and compact size is still in development (Precheur and Delory, 2018).
Direct optical measurements can overcome many of these concerns. Woods Hole Oceanographic Institute (WHOI) pioneered this with the In Situ Ultraviolet Spectrophotometer (ISUS), which uses ultraviolet illumination and analyzes the absorption characteristics of a water sample with a spectrophotometer (Johnson and Coletti, 2002). The technique is applicable to compounds of interest to aquatic scientists, including nitrate, nitrite, bisulfide (HS–) and bromide. Subsequent sensors have operated on the Argo profiling floats (Johnson et al., 2010) and are available commercially.5 Raman spectroscopy has been demonstrated in situ (Hu and Voss, 1997), and used to identify deep-sea geochemistry with ROV-mounted instrumentation, but these sensors are very heavy, require a lot of power, and precise physical alignment with bottom samples (White et al., 2004; Zhang X. et al., 2012). Other biogeochemical sensors are at lower maturity levels that have interesting potential, for example, the series of Lab-on-Chip systems that are relatively compact packages and can operate autonomously (Mowlem et al., 2018).
Small packaged radiometers for directly measuring photosynthetically available radiation (PAR; 400–700 nm), and for measuring upwelling and downwelling spectral irradiance and radiance (tunable for multiple discrete wavelengths) are very useful measurements to characterize several parameters in near-surface waters. They are typically used to quantify the absorption, scattering and other optical properties of the water, including color observed from above the surface (water-leaving radiance and reflectance). These observations are used in the vicarious calibration of sensors on satellites, aircraft, and other platforms designed for the remote sensing of phytoplankton biomass and water quality parameters. Many water quality assessments require turbidity and underwater visibility observations. Phytoplankton, biomass, species composition, and indicators of primary production (PP), a measure of carbon uptake by phytoplankton, are related to the underwater light quality (color) and quantity. Several studies involving gliders and Argo floats have demonstrated estimation of parameters related to water quality and phytoplankton abundance and distribution from PAR and concurrent BCG and physical EOV observations (Hemsley et al., 2015; Pascual et al., 2017).
There are several commercially available in situ fluorometers, which address parameters from bacterial components to chlorophyll and from fluorescent dissolved organic matter (FDOM) to polycyclic aromatic hydrocarbons (PAHs). Measurements based on the principle of fluorescence, the emission of light at a wavelength different than the excitation wavelength, are sensitive and specific. Fluorometers may operate with a single or with multiple stimulation wavelengths and monitor one or more emission wavelengths (Alexander et al., 2012; Ferdinand et al., 2017). A recent development and example of a state-of-the-art capability is the MatrixFlu, which is a compact optical multifunctional sensor developed within the NeXOS project (Pearlman and Zielinski, 2017). An ultraviolet (UV) version of the MatrixFlu senses fluorescent-dissolved organic matter and PAHs using three dedicated UV excitation wavelengths and four detection channels in an ultra-compact seawater-resistant housing. The unit has been tested in ASVs and AUVs. A version with visible LEDs is commercially available.6
A more sophisticated capability is underwater mass spectrometry (Short et al., 2018). This technique can do elemental and isotopic analyses including identifying and describing compounds. The advent of miniature components, such as vacuum pumps, 20 years ago stimulated the creation of portable mass spectrometers (Short et al., 1999) that can be hosted on autonomous platforms such as AUVs (Chua et al., 2016). These portable units provide local and near real-time analyses of analytes, allowing new insights in water mass characterization. While they are powerful tools, they are challenging to using on power-limited platforms. They need an internal vacuum for the mass spectrometer to operate. Also, a methodology for introducing samples into the vacuum from the high pressures at depth is required. This is done typically using membrane introduced mass spectroscopy (MIMS, Johnson et al., 2000), which works for light stable gases (e.g., O2 and CO2) and volatile organic compounds. Additionally, a means for ionizing the sample gas is required. For underwater systems, this is done by electron impact using a hot filament to do the ionization. The electrical power requirements for the vacuum pump and the ionization are not negligible, typically 50–100 W, and future efforts are to reduce the power and size of these systems. Regardless of the challenges, there have been both feasibility demonstrations and practical applications with the spectrometer mounted on AUVs, ASVs, and tethered systems. In a demonstration, a spectrometer operating on an AUV surveyed downstream of the Deepwater Horizon spill (Camilli et al., 2010).
Biological Sensors
Optical sensors have high potential for cost-efficient sensing of the ocean environment. Collecting both still and video images is inexpensive, easier, and more accessible to a broader range of researchers in earth observing (Underwood and Marouchos, 2017). Miniature, low-power, image capture systems can collect increasingly detailed imagery of marine organisms and habitats, including those in the deep sea (Johnsen et al., 2013; Kwasnitschka et al., 2016), although autonomous systems still do not match the capability of towed systems (Purser et al., 2019). Imaging data are increasingly used for habitat assessments and studies (Davie et al., 2008; Kocak et al., 2008) of status and trends in species distribution and abundance. Stereo and multi-camera imaging and underwater light detection and ranging (LIDAR, Sasano et al., 2016) also enable increasingly quantitative levels of imaging that help us better understand environmental variability and changes over time (Mortazavi et al., 2013). There are eye-safe LIDAR systems for classifying marine life based on imagery (Cao et al., 2017). LIDAR systems have become more ubiquitous for sensing suspended particle fields, solid objects, and surface characteristics (Wedding et al., 2019). As these systems become more widespread, so has the need for extensive data support systems to store and process large data sets (Pirenne et al., 2015).
A major area of biological observations is monitoring of plankton. Many sensors, instruments, platforms, and methods available for in situ operational observations of plankton (Boss et al., 2018; Lombard et al., 2019). The goal of observing plankton is to better understand the basis of the food chain, which is responsive to changes in the environment due to natural abiotic and biotic forcing and due to direct human pressures, such as fisheries, other extractive practices, and pollution (Muller-Karger et al., 2014; Muller-Karger et al., 2018). Sampling plankton over high spatial and temporal resolution and across several size classes from microns to millimeters has been demonstrated in many locations around the world.
Zooplankton imaging is now also possible with several devices (Cowen and Guigand, 2008; Picheral et al., 2010). Active acoustics can be used to look at biomass, including plankton (Benoit-Bird and Lawson, 2016), but more detailed analyses of individual cells are done with flow cytometers (Brownlee et al., 2016; Hunter-Cevera et al., 2016). The imaging flow cytobot (IFCB) (Sosik and Olson, 2007) developed by WHOI is an example of a commercially available system7 that has been modified to work in autonomous vehicles. Its size and depth limitations (102 cm length and 40 m maximum depth) generally makes it usable on ASVs. A comprehensive review of other sensors for monitoring plankton illustrates the many alternative techniques and their commercial availability (Lombard et al., 2019). What is notable in that summary and the literature of sensor providers is the increasing interest and capability for operations on autonomous vehicles. Examples are the IFCB by McLane Labs, the LISST-200 by Sequoia,8 and the UVP6-LP by Hydroptics.9
An emerging field for marine biological assessment is nucleic acid analysis, especially the use of environmental DNA (eDNA). The number of sensors demonstrating successful eDNA detection has increased rapidly in recent years, for example MBARI’s Environmental Sampling Processor (ESP) (Beja-Pereira et al., 2009; Foote et al., 2012; Scholin et al., 2017). This detection method has become an effective tool for genetically monitoring species presence and extending the work to address abundance, diversity, and functionality of both microbes and higher organisms (Thomsen et al., 2012; Scholin, 2013; Kelly et al., 2014). This evolution has led to new studies of ecology and a framework for understanding this ecology (Barnes and Turner, 2016). One challenge in these applications is in building eDNA analysis systems that can work on autonomous vehicles; however, recent steps toward a full in situ eDNA measurement system on board an autonomous vehicle involves collecting and preserving samples for laboratory analysis (Scholin et al., 2017; Birch, 2018; Evans et al., 2019).
Acoustic systems have long been used to enable short- and long-range observations in the ocean (Howe et al., 2019). They are becoming more prevalent on a wider range of research vessels, autonomous systems, and even a range of ocean animals (Johnson and Tyack, 2003; Heupel et al., 2018) because of smaller and lower-power sensors. Acoustic systems can also be combined with optical systems to allow for qualitative and direct ground truthing of acoustic data for both hydrographic and biomass applications (Sherlock et al., 2010; Underwood et al., 2015; Marouchos et al., 2016).
Sound is recognized as an Essential Ocean Variable10 (EOV, Miksis-Olds et al., 2018). Capturing and analyzing ambient sound-fields over long periods reveals a great deal of information about ocean dynamics and human activity. Anthropogenic sounds of concern include shipping noise, seismic exploration, dredging operations, oil and gas surveys, naval sonars, and marine construction noise. Natural sounds of interest include those from biotic sources such as animal vocalizations and abiotic sources such as underwater earthquakes. The acoustic landscape, known as the soundscape (Krause, 1993), is the combination of all sounds perceived by an animal or recorded by an instrument. Passive Acoustic Monitoring (PAM) is commonly used for studying marine fauna, for quantifying ambient sonic characteristics of marine environments, and for assessing the impacts of anthropogenic disturbances. In bioacoustics, PAM is typically used to complement visual monitoring, and in the dark or in bad weather it is the primary monitoring method (Erbe et al., 2016b). PAM applications in bioacoustics include presence/absence monitoring and density estimation of marine fauna (Marques et al., 2009, 2011), soundscape assessments (Erbe et al., 2016b), and biodiversity assessments (Parks et al., 2014). PAM is also an attractive choice for monitoring various anthropogenic events (Erbe et al., 2016a) and geophysical events, such as undersea eruptions and quakes (Sukhovich et al., 2014), sea-surface wind and precipitation in remote regions (Nystuen et al., 2000), and, most notably, monitoring violations of the Comprehensive Nuclear-Test-Ban Treaty (Hanson et al., 2001). Sound is also used to diagnose engineering issues (Boyd and Varley, 2001; Jirarungsatian and Prateepasen, 2010).
Since passive acoustic systems do not emit sound, they are easier to deploy in protected areas and in other situations where this feature is valuable. Commonly, acoustic data are collected using cabled or moored underwater recording equipment that can be deployed for extended periods. Data are also collected in situ using equipment onboard ships or by surface drifters and AUVs. The collected acoustic data are analyzed onsite or offsite, by manual or automatic methods, to detect sounds of interest. Analysis of acoustic data often employs a priori knowledge of sound-to-source associations obtained from visual or other means. Human interpretation is usually needed to make inferences from the recorded events. Automation is a continuing challenge.
Passive Acoustic Monitoring benefits directly from the continued independent advancements in sensor technology, smaller and lower-power electronics, and the transition to high-capacity solid-state data storage media. Current autonomous recorders have low power consumption, reduced internal noise, greater durability, and faster data-transfer between system components. Lower-cost devices are being designed to integrate with ocean observing systems (Toma et al., 2015; Pearlman J. et al., 2017). Developing pattern recognition algorithms has evolved from employing purely deterministic methods to using statistical learning methods that offer more generalized results. Algorithm development cycles have been significantly sped up by hardware advancements and the relative ease of building models for statistical learning. The use of Artificial Neural Network (ANN) based methods, such as Convolutional Neural Networks (CNNs) and Deep Neural Networks (DNNs), is increasing.
Platforms
Autonomous platforms are making measurements over a wide array of spatial and temporal periods. Observations range from large-scale processes to small-scale variabilities in salinity, temperature, nitrate, pressure, oxygen, biomass; and many other parameters, depending on the needs of the user. Autonomous technologies for ocean observations in use today include aerial, surface, and subsurface vehicles, satellites, buoys, subsea moorings, and bottom nodes. Observation systems can use any or all of these elements (Kadiyam et al., 2015). True autonomy is still unavailable; all these observation systems still require a great deal of human interaction and support (Ramp et al., 2009).
The largest platforms now support payloads that many years ago would have required manned research vessels. These platforms are still quite expensive and complex. Conversely, systems of numerous, small, and inexpensive observing platforms can increase spatio-temporal coverage, but only for a limited number of ocean variables because small size and limited power implies a limited scientific payload. See Verfuss et al. (2019) for a more detailed review of platforms and their applications.
Surface Vehicles
There is a long history of autonomous surface vehicle development (Manley, 2008) and in recent years a wide proliferation of ASVs, particularly conventionally powered designs based on hulls similar to small manned vessels (Liu et al., 2016). ASVs are starting to be adopted in industrial and military applications for hydrographic surveys,11 inspection, mine countermeasures, and weapons target practice. Such conventional ASVs can support small- to medium-sized payloads and have endurances of hours to weeks, similar to the conventional vessels they replace.
Autonomous Surface Vehicles that use wind- or wave-power to extend endurance have matured recently and are beginning to be applied in ocean observations. The Sailbuoy (Ghani et al., 2014; Hole et al., 2016) and Saildrone (Figure 2) (Meinig et al., 2015; Mordy et al., 2017) are propelled by wind, while the Wave GliderTM (Daniel et al., 2011) and Autonaut use wave power for propulsion. Because of their surface expression, ASVs developed for long-term data collection often use solar panels to extend mission durations, which can be up to 1 year (Villareal and Wilson, 2014), supporting payload power budgets on the order of 30 W. Some ASVs have been fitted with acoustic sensors for bathymetric surveys12 or measuring current velocity and biomass,13 as well as BGC sensors to study upwelling and frontal region dynamics14 (Chavez et al., 2018) and measure carbon exchange between ocean and atmosphere.15 Long-endurance ASVs are also envisioned as communication relays for other subsea platforms (German et al., 2012; Ludvigsen et al., 2016; Phillips et al., 2018).
FIGURE 2

SailDrone deployment in Norway (source: Erlend A. Lorentzen/Institute of Marine Research).
Buoyancy Engine Vehicles
Buoyancy engine platforms include drifters such as Argo floats, and gliders such as SeaGlider and Slocum. Low power requirement of the buoyancy engine along with relatively small, low-power payloads have enabled long endurance missions. Long endurance reduces operational costs and small size reduces the need of large vessels for deployment/recovery operations.
Argo floats have become a workhorse of global ocean observations, providing key measurements of the ocean over the past two decades (Riser et al., 2016). Gliders are widely used for physical oceanographic measurements, especially to study dynamic processes in shallow and coastal areas not well covered by Argo (Liblik et al., 2016; Rudnick, 2016). They are also finding use in military and industrial applications, such as oil and gas production.
It is because of their long endurance and small size that these technologies could be deployed at the global scale by the scientific community in the framework of the Global Ocean Observing System (GOOS), particularly with Argo and the related Deep-Argo, Argo-BGC (Roemmich et al., 2019) but also with the OceanGliders network (Testor et al., 2019).
There are efforts to increase the payload capacity of gliding designs, for example by using blended-wing designs as shown in Figure 3 (D’Spain, 2009), but these have not yet been widely adopted.
FIGURE 3
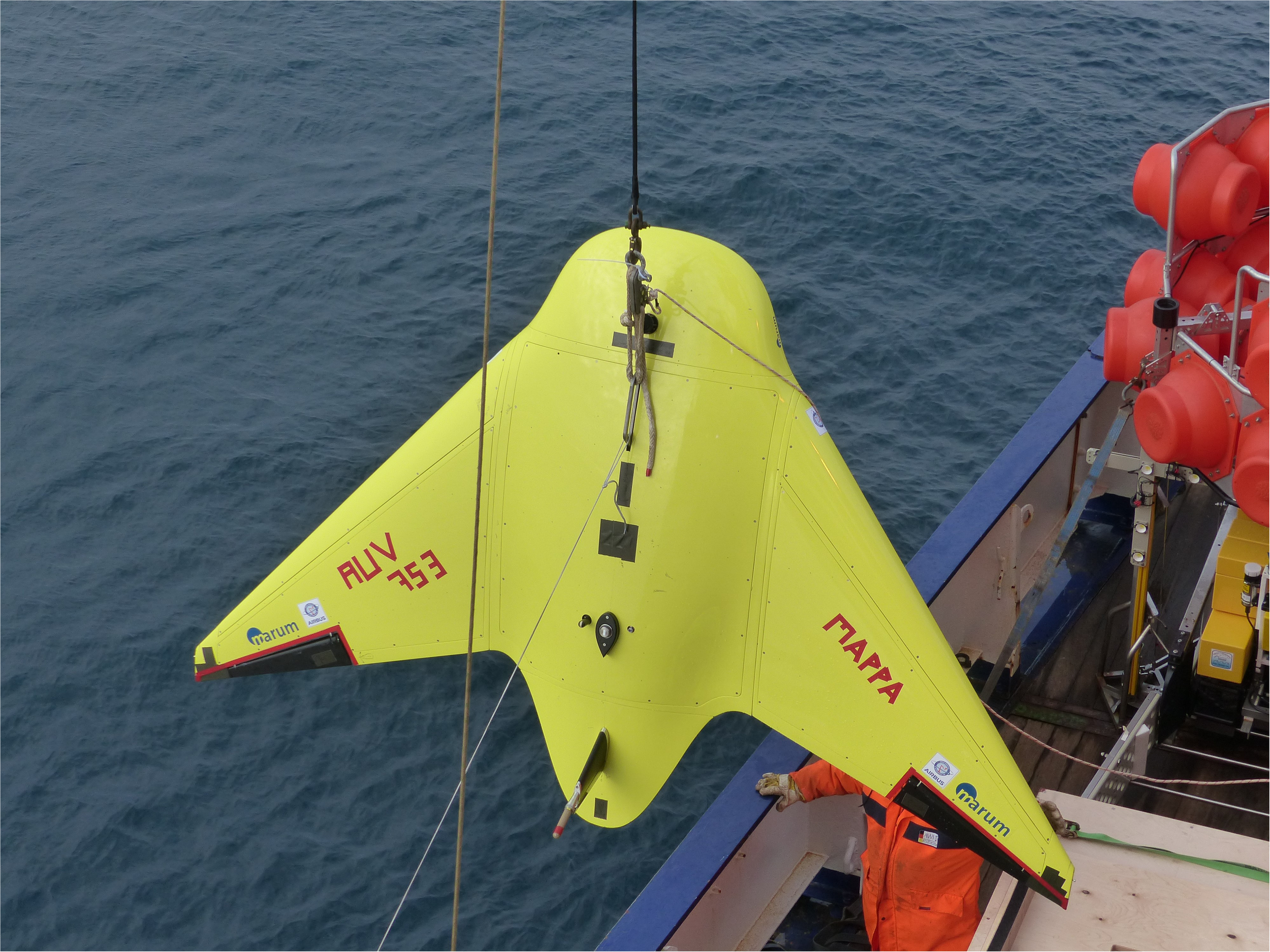
The Blended-Wing glider designed as part of the ROBEX project (© Christoph Waldmann, MARUM, a cooperation project between MARUM and Airbus with support by MBARI).
There has also been some work to integrate a buoyancy engine into a surface craft. The Ocean Aero was the first such Unmanned Submersible Surface Vehicle (USSV). Ocean Aero is not really intended for underwater sampling but rather to dip just below the surface to avoid detection and to get away for surface waves. Rather than use a buoyancy engine, the Ocean Aero essentially operates as a submarine pumping air and water. The SeaDuck (Bachmayer et al., 2018) does use a 4 L buoyancy engine that enables the vehicle to reach depths of 200 m. At the surface SeaDuck operates with a thruster with intended surface operational speeds of 2 m/s.
Thruster-Driven Subsurface Vehicles
Conventional AUVs are typically propeller driven and provide stable platforms for applications such as high-resolution seafloor mapping and imaging. These systems are most often deployed with a supporting surface vessel due, in part, to navigational requirements and frequent recharging/data download.
Autonomous Underwater Vehicles are increasingly used to map or monitor changes in remote ecosystems challenged by pollution, global warming, ocean acidification, and invasive species (Zhang Y. et al., 2012). Industrial activities such as oil and gas production primarily use remotely operated vehicles (ROVs) rather than autonomous platforms like AUVs. However, there are growing industry investments in autonomous systems for routine inspection and intervention activities, which promise to reduce long-term installation maintenance costs by taking on tasks previously requiring manned vessels and ROVs.16 Improvements in AUV monitoring and emergency systems are increasing platform reliability and mission success rate (Inzartsev et al., 2016).
Autonomous Underwater Vehicles range in size from hand-deployable to approaching the size and capability of a small manned submarine (Coly, 2016). Conventional designs, such as Hugin, Autosub (Roper et al., 2017), REMUS, Sentry (Kaiser et al., 2016), and Tethys (Hobson et al., 2012), support payloads of hundreds of watts to nearly full-ocean depth, with typical endurances of days to weeks. In some cases, design endurances are many months. Wynn et al. (2014) and Vedachalam et al. (2018) review the capabilities of AUVs.
Conventional designs typically require forward motion for control, but some designs called hovering AUVs or over-actuated AUVs (such as Delphin2 and ARTEMIS, Figure 4) have precise station-keeping for tasks such as inspection (Philips et al., 2013; Albiez et al., 2015). Conventional AUVs such as REMUS have also been experimentally fitted with such capabilities (Packard et al., 2010). Intervention AUVs build upon the capability of hovering AUVs to add manipulator arms and other devices to begin to match the capability of ROVs (Ridao et al., 2015).
FIGURE 4

Stone Aerospace’s ARTEMIS vehicle being launched into the Antarctic ocean through a drilled hole.
The diversification of hybrid underwater vehicles is extending our ability to monitor our environment. Equipping gliders with thrusters enables them to overcome some environmental limitations, while adding buoyancy engines to a conventional AUV can reduce the energy needed to maintain depth, which increases range and endurance compared to solely using propeller propulsion (Sauser, 2010). Similarly, combining the type of platform stability and manipulation capabilities typical of ROVs with AUV platforms offers significant opportunities for close-up observations, sampling, and infrastructure maintenance that was previously only possible with ship-supported ROVs (Johansson et al., 2010).
Energy Sources
As noted previously, energy limitations can impact the mission capabilities of autonomous vehicles. There have been significant successes in increasing the endurance of autonomous underwater vehicles because of advances in vehicle design, power management, and chemical energy storage. For example, lithium-seawater batteries have an energy density up to 4 MJ/kg, twice that of primary lithium-ion batteries and almost an order of magnitude higher than rechargeable lithium-ion batteries (Davis and Sherman, 2017; Roper et al., 2017). These improvements have extended time between maintenance intervals, increased potential for onboard computing (e.g., enabling adaptive sampling), and expanded payloads to include sensors with higher fundamental power consumption. Propeller-driven AUVs cruising at up to 1 m/s now have endurance design targets exceeding 6,000 km (Roper et al., 2017) and support a variety of sensors from low-power measurements of water properties to more power-intensive multibeam sonars (Hobson et al., 2012; Wynn et al., 2014). However, maximum payloads remain limited compared to surface vessels (e.g., <1 m3), and increasing payload size increases propulsive power requirements and overall vehicle costs. Given the limits to propulsive efficiency (Phillips et al., 2017), there remains a significant gap between the payloads that can be supported by a manned or autonomous surface vessel and those that can operate autonomously underwater for extended periods. Similarly, “high” power consumption for sensors is on the order of 10 W (Hobson et al., 2012; Roper et al., 2017), which is still quite low in absolute terms compared to what is possible for cabled observations. One way to extend endurance and capability without increasing vehicle cost is for vehicles to dock at a recharge node. This is an emerging technical capability that has achieved some success in limited, short-term demonstrations (Cruz et al., 2017; MBARI, 2018). If a recharge node can be shared among many vehicles, the savings in vehicle costs may offset the capital and operational cost of the recharge node. The gains from moving to this operational model are potentially transformative if observational requirements are compatible with the platform density and mission profiles needed to realize the operational cost savings.
Such a capability requires an external power source. Candidates include diesel-fired engines and fuel cells, which can produce electrical power from fuels with an order of magnitude higher energy density than batteries (e.g., 38–48 MJ/kg for diesel, 142 MJ/kg for hydrogen). However, these recharge systems themselves require periodic refueling and a surface expression for the reaction oxidant (i.e., air). In some situations, particularly for sub-surface applications, harvesting in situ energy resources is a compelling alternative to chemical energy conversion. In situ harvesting has already enabled substantial advances in endurance using wave propulsion (e.g., Wave GlidersTM, Webb et al., 2001) or wind (e.g., Saildrones, Mordy et al., 2017); however, it remains uncommon for energy harvesting to provide subsurface propulsion or meet electrical demands posed by remote sensing, onboard processing, and communication. If we restrict our consideration to instrumentation nodes that also provide recharge and communication services to AUVs, this application will likely require the equivalent of 100 W to 10 kW of continuous electrical power. This likely eliminates some conversion technologies that are feasible only at much smaller scales, such as vibration energy harvesting (Beeby et al., 2007). The most probable near-term in situ candidate energy sources include the following:
- •
Solar photovoltaic panels (Razykov et al., 2011);
- •
Wind turbines, either horizontal axis or vertical axis (Sun et al., 2012);
- •
Wave energy converters, which convert the kinetic and/or potential energy in surface waves to electricity (Falcão, 2010);
- •
Current turbines in tidal or ocean currents, which operate on a similar principle to wind turbines (Khan et al., 2009); and
- •
Thermal gradient energy conversion from thermal vents (Xie et al., 2016), on a similar principle to larger-scale ocean thermal energy conversion (Vega, 2002) or smaller-scale harvesting from profiling platforms.17
Table 1 enumerates these technologies, their resource intensities, conversion efficiencies, benefits, and challenges. A key challenge is that conversion technologies that are currently commercially available require a surface expression, which can be difficult to maintain; however, adopting pre-commercial technologies does not lie in the far future. For example, small wave energy converters have been used to provide power to navigation buoys for some time (Masuda, 1986). Recently, the Monterey Bay Aquarium Research Institute (MBARI) developed an AUV recharge station associated with a buoy acting as a wave energy converter (Hamilton, 2017; MBARI, 2018). In another recent example, a joint industry project involving academic researchers and a wave energy technology developer deployed an autonomous package consisting of a wave energy converter and integrated instrumentation package (Joslin et al., 2019). The instrumentation package includes stereo optical cameras, artificial illumination, a multibeam sonar, acoustic camera, and two hydrophones. Data are continuously acquired from all instruments and processed in real time by an onboard computer to determine if they include events of interest, for example marine mammal presence. In addition, the project is demonstrating the longevity of a wireless power transfer solution for AUV recharge. The entire system required 600 W of continuous power, which was produced primarily by the wave energy converter with a backup solar panel (enough to maintain the “heartbeat” on the programmable logic controller and communication link) via a battery-backed microgrid.
TABLE 1
| Energy source | Primary resource intensity | Conversion efficiency (%) | Benefits | Challenges |
| Solar photovoltaic | 90–350 W/m2 panel areaa | 10–40b | • Commercial technology • Unlimited persistence | • Limited resource at high latitudes • Harsh operating environment for surface expression |
| Offshore wind | 40–800 W/m2 rotor swept areac | 15–45d | • Commercial technology • Unlimited persistence | • Limited resource at equatorial latitudes • Harsh operating environment for surface expression • Small-scale, distributed wind systems have lower efficiency |
| Wave | 10,000–120,000 W/m of linear wave creste | 10–100+f | • Unlimited persistence • Does not require a surface expression | • Pre-commercial technology • R&D has been focused on grid-scale applications |
| Ocean currents | 60–4100 W/m2 rotor swept areag | 15–45h | • Unlimited persistence • No surface expression | • Pre-commercial technology • R&D focused on grid-scale applications • Limited geographic relevance |
| Thermal gradients | –i | –i | • Unlimited persistence • Does not require a surface expression | • Limited resource at high latitudes • Environments near thermal vents are extremely harsh |
Candidate energy sources for AUV recharge and offload nodes.
aDirect normal radiation: https://power.larc.nasa.gov/data-access-viewer/. bRazykov et al. (2011). cEstimated from annual average wind speed at 10 m: https://power.larc.nasa.gov/data-access-viewer/. There is a substantial reduction in the resource with proximity to sea surface due to logarithmic wind profile. dLower end corresponds to turbines with passive control systems; upper end corresponds to turbines with active control systems: (Manwell et al., 2010). eGunn and Stock-Williams (2012). fConversion systems radiate waves and can, in theory, capture energy beyond their physical extent. Range corresponds to small-scale systems at the lower end and theoretical performance on the upper end. Ranges for grid-scale wave energy conversion technologies fall between these extremes and are discussed in Babarit et al. (2012). gRange corresponds to 0.5–2.0 m/s current speed and are representative of energetic ocean currents. Power varies with the cube of velocity, so currents weaker than 0.5 m/s are generally unsuitable for energy harvesting. hAssumed identical to the value for wind, given the potential for ocean current technologies to leverage technology experience for wind. iTheoretical thermal conversion efficiency is given as 1 − TL/TH where TL is a low-temperature reservoir (e.g., cold seawater at depth) and TH is the high-temperature reservoir (e.g., thermal vent, warm seawater near the surface). Energy yield depends on rates of heat transfer.
Adopting wave, current, and thermal gradient technologies has been slow in grid-connected markets due to their cost substantially exceeding that of renewable alternatives such as solar and wind; however, there is growing global recognition that the grid is not the sole market for these technologies (Copping et al., 2018). Numerous technology developers creating wave energy converters are sizing and tuning their devices to serve smaller markets including ocean sensors (e.g., Resen Wave in Denmark). Recent research has produced an order-of-magnitude gain in the conversion efficiency of wave18 and current (e.g., Strom et al., 2017) systems suitable for integration with autonomous observing systems. Developing marine energy conversion technologies for ocean observation and exploration markets would also be mutually beneficial, allowing rapid iteration of prototypes at smaller scale, the demonstration of novel deployment and maintenance strategies, and opportunities for mass production.
Communications
It is common to use satellite communications for autonomous systems that have some type of surface access (Krishfield et al., 2008; Roemmich et al., 2009; Daniel et al., 2011). The bandwidth is typically on the order of hundreds of bytes per second, which is suitable for command and control, but only some types of direct measurements.
Underwater communication is difficult because of the nature of ocean physics. For acoustic communication, channel estimation and choice of sensor locations are both difficult because of multipath and fluid motion effects. For electromagnetic communication the limitation is the absorption of electromagnetic energy in water.
Acoustic communication is used for low data rates and medium distances, and NATO recently published an international standard for underwater digital communication (NATO, 2017). Optical or electromagnetic communication is used to link autonomous platforms and to support nodes at high data rates and very short ranges (Lloret et al., 2012). Speeds of up to 30 Mb/s have been demonstrated over distances of several meters (Al-Halafi and Shihada, 2018). Optical links have an energy efficiency of 30 kB/Joule compared to ∼100 bits/Joule for acoustic communication, so they can also be more power efficient for high data transfer rates.
Autonomous platforms use active acoustic sensors for acoustic communications and direct observations. Particularly in shallow water, the acoustic channel changes rapidly due to bathymetry, changing boundary interfaces, and physical oceanographic conditions. The limitations of computational techniques to robustly track the rapidly fluctuating shallow water acoustic channel also impact oceanic observation applications. Physical layer challenges to shallow water channel estimation lead to cross-layer issues that pose important design constraints to observation technologies that rely on efficient communication between acoustic sensors. Different strategies are needed based on how the ocean state affects the physical layer channel (Stojanovic, 2007). For example, a network of AUVs using acoustic sensors will need to continuously update the inter-sensor data transmission rate as the channel capacity between any two sensors changes due to changing multipath and other forms of acoustic scatter.
In the last decade, several solutions have been proposed (Akyildiz et al., 2005; Chitre et al., 2008; Singer et al., 2009) to solve the channel estimation challenges to underwater acoustic communications: compressive sampling, rateless coding techniques, and cooperative transmission techniques. Compressive sampling (Candes et al., 2006; Donoho et al., 2006; Baraniuk, 2007) and a diverse suite of mixed non-optimization techniques (Sen Gupta and Preisig, 2012; Ansari et al., 2016, 2017; Zhou et al., 2017a,b; Jiang et al., 2018; Wu et al., 2018) have been recently applied to follow the shallow water acoustic channel. Rateless coding techniques (Brown et al., 2006; Castura et al., 2006; Chitre and Motani, 2007) address the issue of uncertainty in channel state information, and therefore provide efficient, robust communication between a transmitter and a receiver. Cooperative transmission techniques increase wireless network capacity (Han et al., 2008; Vajapeyam et al., 2008; Wang et al., 2011; Cheng et al., 2012) through multiuser cooperation in the physical layer.
Platform Coordination
At the highest level, programs such as the ARGO float system (Schmid et al., 2007; Roemmich et al., 2019) coordinate autonomous platforms in the sense of maintaining distributed coverage of observations. Gliders (Paley et al., 2008; Testor et al., 2010, 2019) have been more directly coordinated in regional and local process studies. The architecture for a truly integrated global glider network is a work in progress. Early discussions (Bellingham, 2006) of adaptive sampling considered the interpretability of irregular observations as a key factor.
Outstanding sampling capabilities are possible when different AUVs are deployed in large numbers (Testor et al., 2018). Depending on the studied phenomena, different strategies can be adopted using different AUVs. There could be some that are dedicated to high-resolution measurements and others dedicated to providing information at larger spatial and temporal scales to assess the oceanic background. Methods are also being developed to allow autonomous systems to coordinate observations in challenging environments. Long-range acoustic signaling has been demonstrated as an AUV navigation method which can enhance multi-platform missions in GPS-denied environments such as under Arctic ice (Freitag et al., 2015; Lee et al., 2017).
Design exercises are used to decide the optimal numbers of different platforms to be deployed, considering a given scientific objective. Ocean numerical modeling can simulate the sampling of the platforms in relatively realistic virtual oceans. The optimization challenge is to meet the scientific objectives at the lowest possible cost. These design studies are now an important part of oceanography and will become more important in the future.
Both civilian and military researchers are considering the design of interoperable AUVs (Carrera et al., 2016; Constanzi et al., 2018; Phillips et al., 2018). Current work is focused on increasing the autonomy of AUVs and Autonomous Surface Vehicles (ASVs) and developing standards for interoperability between heterogeneous platforms to decrease the requirement for complex specialized platforms.19
Several institutions are making progress toward integrated systems of heterogeneous platforms focusing on persistence in the maritime environment20 (Braga et al., 2017; Schmidt Ocean Institute, 2018). Many experiments have demonstrated heterogenous networks of autonomous platforms working together (Schofield et al., 2010; Huet and Mastroddi, 2016; Centurioni et al., 2017; Lindstrom et al., 2017; Marques et al., 2018; Phillips et al., 2018; Testor et al., 2018). Military trials, as depicted in Figure 5, also demonstrated interoperable communications using a standard protocol for underwater digital acoustic communications (LePage et al., 2015), and adaptation of sensors and systems based on real-time environmental conditions (LePage, 2018). Recent trials have demonstrated decentralized, dynamic task assignment (Ferri et al., 2018).
FIGURE 5
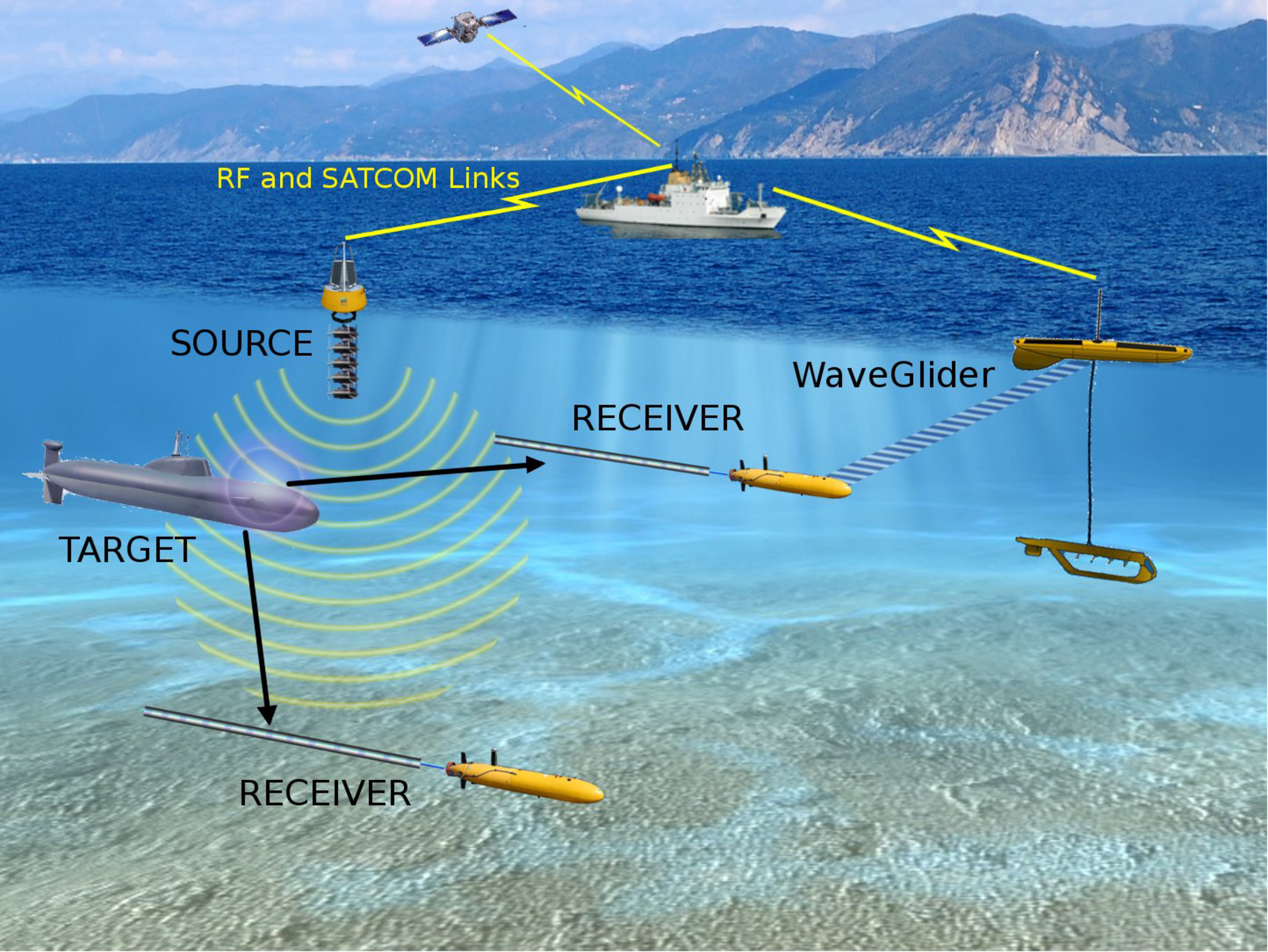
A conceptual description of a cooperative network of AUVs.
Future Vision
Existing autonomous observation systems have shown that there are many complex levels of dynamics in the ocean from global to meso and local, each coupled in non-linear ways. To meet the need for a better, more integrated Ocean Observing System, we need advances at the sensor, platform, and system levels, including data interoperability. Compact, low-power sensors that are calibrated and stable, will enable more and better observations for more EOVs. Robust strategies for cross-calibration of sensors will enable reliable quantitative interpretation of data from large numbers of autonomous sensors. We need autonomous platforms that are more affordable, more modular, more capable, and easier to operate. In situ power generation will also extend endurance for some types of autonomous platforms, including standardized docking stations that will also enable AUV communications and recharging. Standardized communications for autonomous platforms will improve ease of use and enable coordinated behaviors. Improved autonomy and communications together will enable self-guided adaptive networks of AUVs to increase effectiveness further.
Improvements in autonomy will have three aspects: hardware, control, and operations. As sensors and platforms have more capability and energy capacity, more measurements become possible. Control systems and software will have more sophisticated states and reactions to sensor inputs, which both allows the platform to handle a wider variety of circumstances without direct operator control, and allows the operator to better know the state of the autonomous platform with less communication bandwidth. Operational autonomy is increased by reducing operating costs.
The future technical vision includes expansion of current capabilities [such as more bio-geo-chemical (BGC) Argo21 profilers or adopting routine plankton monitoring on GO-SHIP22 lines], significant technical updates to existing systems (such as advanced batteries in gliders), and paradigm shifts from new capabilities (such as sensor breakthroughs to enable widespread adoption autonomous platforms).
There are several factors that are common to all of these. One factor is the need to deal with large quantities of data. Eventually, all these data will need to be processed efficiently. For applications such as human health warnings, tsunamis forecasts and weather modeling, the data have the most value when they are available in near real time. Large datasets need an integrated approach to communication and then processes for translation of data to knowledge, which supports societal impactful decisions by end users (Buck et al., 2019). From the user perspective, another important factor is trust of data and information. For this, traditional factors of quality assurance / quality control (QA/QC) and provenance need to be adapted to future needs, accommodating greater automation and machine to machine paradigms (USIOOS, 2017). A third factor is documenting and making available the methods used in observations and analyses across the value chain of data to information in order to support reproducibility and interoperability. This encompasses both standards and best practices (Pearlman et al., 2019).
Sensors
The ideal sensor for future autonomous platforms will be cost-effective, compact, interoperable, web-enabled, and self-identifying. Cost-effective sensors may be suitable for large-scale production, and could leverage features of modern electronics, such as communication, positioning, and miniaturization. Compact sensors are autonomous multifunctional integrated packages. Web-enabled sensors acquire, pre-process, store, and transmit data in standardized formats. Interoperable sensors integrate with existing observing systems. Self-identifying sensors can communicate metadata through protocols such as PUCK23 and may also support real-time QA/QC. These ideal features will be implemented differently in different types of sensors. The following discussion focuses on sensors for selected biological applications as a specific example.
Some future multi-purpose sensors will function in air and water (Moline and Benoit-Bird, 2016). Multi-purpose features could be for calibration, as is currently done with oxygen optodes (Bittig et al., 2015), or for improving functionality, such as using a single camera to achieve 3-D obstacle detection and avoidance (Shah and Johnson, 2009).
Integrated sensor networks are needed for detecting macro-pollution, microplastics, and oil spills, ultimately leading to better response and mitigation through timelier interdiction. The trend toward small analysis instruments, such as gas chromatographs and mass spectrometers, allows in situ processing to send digital data rather than water samples back to the laboratory. Deploying high-resolution optical nitrate sensors around water catchment areas provides critical information on agricultural and farming runoff. These data are critical for assessing the impact of croplands on areas such as the Great Barrier Reef.
A variety of spectrometers described in Section 0, such as fluorescence sensors, are already used for ocean measurements. More broadly integrating such sampling sensors into autonomous platforms enables more efficient and effective data collection. Sample selection will preferably be driven by AI and adaptive sampling methodologies through closely coupled sensors and autonomous platforms.
There is a need to go “beyond fluorescence” and beyond bulk optical properties. It is important to make observations that can characterize how carbon, nutrients, and energy are partitioned across diverse forms of life. The ideal sensor is a “lab on a chip”24 which can readily interface with autonomous platforms (Beaton et al., 2012; Grand et al., 2017). In addition, for optical sensors, there are opportunities to leverage consumer technologies to provide a foundation for a new generation of chemical and biological observations. These could provide improved measurements of productivity and biomass in the world’s oceans. In addition, more comprehensive monitoring of biological diversity is needed (Muller-Karger et al., 2018) for determining how food webs sustain ecosystem services, such as fisheries, carbon storage or release, and sediment formation. This involves not only optical systems, but acoustic observations. Optical sensors, especially the flow cytometers and imaging devices, are still very expensive. Inexpensive optical sensors are needed for more widespread use, possibly leveraging mobile phone camera and solid-state laser technology. Imaging devices also generate large quantities of data and images that require automated expert classification, data curation, archival, and distribution.
Sensor fusion is the integration of data from multiple sensors. An interesting challenge is automating the merging data from sensors that observe different views of a phenomena, such as ocean color satellite observations and in situ biology monitors (Boss et al., 2018), where the geo-spatial dimensions are different. Coarse (>10–30 m resolution) space-based data and point measurements can be linked through modeling. With the advent of advanced computing and access to cloud resources, models should improve so that the contributions of moderate resolution imaging and point data can be more effectively integrated. Another challenge is the fusion of biological observations, e.g. ‘omics’ and plankton sampling. Even simply the merging of multi-level ‘omics’ would be a step forward, deriving from the techniques developed in medical research (Huang et al., 2017).
Passive acoustic monitoring will see continued improvements in data handling, detection, classification and localization, and standardized metrics. Terminology (ISO, 2017) and soundscape metric standards (Ainslie et al., 2017) need wider adoption, as well as best practice methodologies. Analyses will more often be computed onboard to identify sounds of interest, react to events, and communicate results in near-real-time. Acoustic data loggers will have wider bandwidth and longer endurance. Sensor fusion will increase. An example of homogeneous fusion is using hydrophone arrays to determine the direction of detected events. An example of heterogeneous fusion is combining mammal vocalization detection on gliders with AIS tracks to evaluate risks of ship strikes in traffic lanes. Balancing the use of the ocean with the impacts of anthropogenic sound requires improved fidelity of species- and population-based monitoring and better understanding of soundscapes.
Platforms
As costs decrease, and science capabilities and reliability increase, the growing number of autonomous platforms at sea will complement and extend observations that were conventionally done with manned platforms.
Autonomous platforms with greater control autonomy will begin to replace the typical pre-programmed missions of today. Advances in signal and image processing have allowed onboard learning and classifiers. Larger storage and enough processing power allow more on-board decision-making, which enables more control autonomy. Autonomous platforms will execute more complex survey missions, using measurement results to directly plan subsequent measurements. The question of how far this capability can be foreseen. Can an autonomous system be used to launch Argo floats? Going further, can there be an automated fleet of factory ships which can build and release sensors/platforms as needed to sustain a global observing system (Marlon Lewis, personal communication, Sept 25 2019)? To what extent can fault tolerant systems be designed so the learning curve to mature operational platforms can be shortened?
Not going too far into the future, advanced vehicles will have intelligent decision-making capabilities in navigation, energy management, and error handling (Vedachalam et al., 2018). Vehicles will plan their path based on model predictions to accomplish a goal. ASVs will replace manned vessels in supporting short-range acoustic positioning systems for AUVs, and longer-range acoustic navigation systems will begin to see regular use. Long-endurance autonomous systems that have enough energy to use inertial navigation may improve accuracy using new data inputs such as observed seafloor bathymetry (Salavasidis et al., 2019), under ice networks and communications with surface platforms. Platforms will also be more tolerant of failures. Early fault detection will trigger behaviors to mitigate equipment or data loss.
In addition to platform design and operational cost reductions, improvements in sensors will reduce costs by reducing science payload power requirements and enable the use of progressively smaller platforms. Many unmanned vehicles are already semi-modular with the ability to add sections for more payload. In the future, some of them may also be multi-domain (ONR, 2018; Weisler et al., 2018) and auto-reconfigurable, depending on the task autonomously selected or manually assigned.
Long-term deployments of more energy-intensive vehicles will become more commonplace as vehicle charging and wireless data transfer capabilities are added to remote infrastructure, such as Cabled Observatories (Manalang and Delaney, 2016) and marine hydrokinetic energy system installations (LiVecchi et al., 2019). Temporary docking installations may be used in areas of intensive monitoring, such as deep well decommissioning.
Light intervention AUVs (I-AUV) are hovering vehicles with manipulator arms that can focus on a single object or small area for an extended period. As I-AUVs become available they could complement ROVs in some applications (Ridao et al., 2015). Advances in docking I-AUVs will extend the mission profiles (Cruz et al., 2017).
There are visions of a paradigm shift in platform capabilities. Work is underway to develop a system that can self-deploy, and perform the aerial, surface, and subsurface functions of a drone, an ASV, and an AUV. Several vehicles that achieve flight and underwater missions are in the research phase (Edwards, 2017). The Monterey Bay Aquarium Research Institute (MBARI), working with the Office of Naval Research (ONR), is developing an entirely new vehicle that uses ground effect in flight mode to reduce energy requirements and extend persistence. After transiting in flight mode, the vehicle then lands on the water surface to await instructions, perform an action, then take off again. It can act as a relay between other similar systems, or it can submerge and function as an AUV. The concept is to imitate sea-going birds. Birds, such as pelicans, use ground effect for low-energy transit, then land or dive underwater. This new hybrid system has been dubbed Shearwater25 (Figure 6). MBARI is currently building a functional scale model to demonstrate the capabilities (ONR, 2018). The goal of such an innovative design is to greatly increase operational autonomy.
FIGURE 6

The Shearwater vehicle concept under development (Image courtesy MBARI 2012©).
Energy Sources
Developments in batteries for terrestrial vehicles will be leveraged in the short term to increase vehicle endurance. Docking and recharging stations will also extend mission duration26 (Maguer et al., 2018) but will require primary energy sources, such as shore cables, liquid fuels, or in situ harvesting.
Presently, power sources include batteries, cabling, or generation of solar, wind or diesel power on buoys at the surface. Due to their high energy density, hydrocarbon fuels will undoubtedly continue to be part of the solution for recharge stations. Going forward, in situ, and particularly sub-surface energy harvesting, are likely to be increasingly able to meet energy demands for underwater instrumentation and AUV charging. By providing renewable power without surface expression, marine energy technologies (i.e., wave, current, and thermal gradient conversion) could enable multi-year persistence that enable wholly new frontiers in science, security, and economic development (Copping et al., 2018). Due to the intermittency of renewables, energy storage will be needed at sea to provide consistent and rapid recharge or power supplies (LiVecchi et al., 2019).
Routinely incorporating sub-surface marine energy conversion systems into autonomous platforms will require further technology development guided by collaboration with end-users. For example, while the resource intensity of wave energy is orders of magnitude larger than other in situ resources and theoretical conversion efficiencies are high, practical conversion efficiencies are relatively low and survivability in extreme events must be improved. Progress is being made in these areas and gains in autonomy and reliability achieved in ocean observing will also broadly benefit future energy harvesting technologies. Finally, standards for docking stations will also be required for platform interoperability that can facilitate broad adoption by the ocean observing community.
Communication
Satellite communications systems being developed will soon be available with more bandwidth per user, fully reconfigurable coverage footprints, dynamic routing of uplink and downlink, and dynamic bandwidth allocation (Fenech et al., 2015). Satellite communication costs are expected to decline with the increasing use of nanosatellites.27 Though the market is for rural areas and developing countries, coverage over the ocean will support more data transfer for autonomous operations. Higher communication bandwidth will enable platforms to support new sensors as well as operate more independently from shore or support vessels, increasing both hardware and operational autonomy.
Many future applications will still use acoustic communications as it is the only practical long-range method to support increasing needs for navigation, control, and dynamic mission planning based on subsea observations. Positioning and navigation will be improved by increased use of communication between platforms, particularly in deep water. More use of inter-platform communication will also allow more navigation-capable vehicles to support less expensive, less capable vehicles. This increases operational autonomy by maximizing the submerged endurance of platforms for under-ice operations, deep ocean mapping, and for other geo-referenced observations.
The bandwidth and ranges for acoustic communication will not improve dramatically, even if more complex protocols and strategies are used (Melodia et al., 2013). The current pioneer for an international standard underwater digital communication is JANUS-STANAG 4748 (NATO, 2017). Wider adoption of standards for communication will improve interoperability and ease of use for autonomous platforms.
A solution to bandwidth limitations in underwater communications is to use drifting, temporary surface buoys as low-power repeaters that connect to a subsurface platform using an acoustic modem. The surface buoy could communicate using conventional radio or satellite methods. These devices will need to be self-configuring and easily deployed, and would be most useful in specific applications with relatively large numbers of autonomous platforms in a given area. This type of repeater network would enable multi-vehicle operations, widely dispersed sensor networks and remote operations on-shore command and control when needed. This is conceptually similar to animal tracking networks where low power marine animal borne sensors couple to receivers distributed in the tracking area (Heupel et al., 2018).
Underwater life has evolved sophisticated acoustics-based communications suited to their environmental conditions. Animal communication systems are a source of inspiration for new technology, and also a consideration in developing methods that do not conflict with or disrupt natural communications (Li et al., 2017; Barbeau et al., 2018; Sherlock et al., 2018).
Optical communications will become more popular for short range, high bandwidth inter-vehicle communication. Real-time control of untethered vehicles during complex subsea manipulations may be possible using optical links to transfer high bandwidth video and vehicle/dock attitude parameters (Farr et al., 2006; Domingo, 2008). Improved optical links will allow autonomous vehicles to download larger data sets to docking stations or relay nodes that connect with surface and land-based platforms. Docking station standards and best practices are needed to allow heterogeneous platforms to use shared nodes for communications and power.
Platform Coordination
Confidence in autonomy will increase as data- and model-driven control strategies become robust; however, more integrated mission planning is needed to realize the full potential of heterogeneous networks of autonomous platforms (Ludvigsen et al., 2016). Navigation will integrate environmental forecasting and tactical prediction. Advanced platforms will be able to build their situation awareness. Some systems may even use additional models to update their mission objectives and improve the usefulness of their observations.
There have been many discussions about platform coordination for monitoring EOVs (Testor et al., 2019), marine fauna (Verfuss et al., 2019), etc. Each type of application optimizes platforms and sensors to the needed observations. Yet it is the ability to use collected data for multiple end purposes that should be taken into consideration (acknowledging the cost impacts of added requirements). These types of trades should be done in a systematic way, done from the perspective of an integrated architecture for global ocean observing. This is consistent with the GOOS vision of “a truly integrated global ocean observing system that delivers the essential information needed for our sustainable development, safety, wellbeing and prosperity” (Tanhua et al., 2019). The architecture should be layered so that there is both a top down and bottom up flexibility. This will allow effective integration of existing networks and encourage expansion of observations through innovation and technology advances. For example, the effectiveness of teams of platforms will increase as systems become better able to sense, interpret, and act upon unforeseen changes in the environment and vehicle. Vehicles navigating in a formation will require exchange of navigational information and some guidance for coordinating observations.
Sensors and platforms need new standards and agreed processes for data exchange and shared data interpretation. Standards will improve network flexibility and create broadly interoperable systems. For example, navigation techniques for under-ice or deep ocean positioning could be applied in other domains to reduce the need for surfacing, simplify mission profiles and increase measurement efficiency. Flexible and interoperable networked systems can be simpler, more modular, and produced in higher volumes to decrease per-unit capital and operational costs. More cost-effective platforms can be deployed in larger teams to make observations more quickly and over larger areas. Applications could include upwellings in boundary currents or underwater eruptions where temporal dynamics may be of interest.
Widespread use of teams of autonomous platforms may require improved awareness of regulations (Huet and Mastroddi, 2016; Chiang and Tapia, 2018). Depending on the size and nature of the autonomous platform, users may need a better understanding of collision regulations, insurance requirements, and liability. Technology developments that could help include mandatory onboard black boxes and water-spatial management tools, such as public databases to register autonomous platform operations.
Downstream Connectivity
The value of data is in the information that can be created from it to impact societal applications. Connecting sensors and platforms with data repositories and end-users is a priority. The Sensor Web Enablement (SWE) suite of OGC includes standards for sensor/platform interfaces, encoding data and metadata, and data transmission (Buck et al., 2019). Semantic interoperability is achieved using marine-relevant vocabularies to enable the unambiguous description of metadata and data (Buttigieg et al., 2016). The European NeXOS Project demonstrated these capabilities (Río et al., 2018). The next steps are the evolution of SWE to address linked open-data services and the introduction of the Internet of Things (IoT) in ocean observations. These capabilities are being drawn from developments outside the ocean community. Additional features, such as access control, security models, and interface of SWE with the web standards, need to be addressed as ocean observation systems evolve to adopt SWE and IoT (Buck et al., 2019).
Future autonomous platforms will generate large data sets covering basic oceanographic to complex acoustic or even eDNA data. The community should adopt principles of Findability, Accessibility, Interoperability, and Reusability (FAIR, Wilkinson et al., 2016). FAIR principles and increasing real time availability will make data usable by new communities and reduce the overhead in integration between observing networks. For example, improved biogeochemical numerical ocean models are developing and will become a significant new user of oceanographic observations collected by autonomous platforms such as biogeochemical Argo (Fennel et al., 2019). The application of the FAIR principles in combination with new tools such as digital notebooks (e.g., Jupyter) will enable more complete documentation of data analysis and thus a revival of reproducible research facilitating trust in scientific results.28
Recommendations
Thirty years ago, Hank Stommel laid out a vision of autonomous vehicles as small, cheap, torpedo-like drones that would glide around in the ocean on their own, with an ingenious new engine that would draw power from the ocean itself. While the details are different, the vision is not too far from the reality today. The next decade of vehicles, sensors and systems will be able to examine the ocean in new ways and discover yet more that may is unimagined.
- (1)
Autonomous platforms should decrease in cost and increase in reliability. True autonomy will be achieved within a decade based on trends in automobiles, mobile phones and advanced processors. Ocean systems can also benefit from advances in reliability engineering for these high-volume, mass-production products.
Recommendation: there is a cultural change that is needed. Platforms are low volume, relatively high cost. The ocean community should come together to agree on applications where observations need order-of-magnitude increases, then agree on a limited number of platform specifications and a price limit for a volume buy of each.
- (2)
Improved interoperability of sensors, platforms, and their interfaces will reduce costs.
Recommendation: new standards and best practices are needed. Current standards and best practices should be made broadly discoverable and accessible, and new standards and best practices should be created/adapted for ocean observing. Standards, such as the IoT and SWE, should be drawn from non-marine communities for use in ocean observing systems.
- (3)
Teams of platforms, each with improved autonomy, can transform operational patterns and capabilities. There are many applications where networks of multiple vehicles can improve operational efficiencies, such as seabed mapping, ecological monitoring, oil spill monitoring, and oil platform decommissioning.
Recommendation: develop operational architectures at global and regional scales to provide a backbone for active autonomous networking of platforms.
Recommendation: docking station standards should evolve to allow heterogeneous platforms to use shared nodes for communications and power. A standard organization such as IEEE Standards Association should be engaged to move this forward.
- (4)
The power and energy limitations will become less severe with battery improvements and lower power sensors, but batteries will be insufficient for some applications. In situ energy harvesting has the potential to provide the necessary power.
Recommendation: energy harvesting technologies should be integral to the system design, for sensors, platforms, vehicles, and docking stations. Stronger connections are needed between the marine energy and ocean observing communities to coordinate among funding sources, researchers, and end users.
- (5)
As the population of AUVs increases, it will be necessary to consider regulations for operating autonomous platforms, particularly in coastal areas.
Recommendation: regional teams should work with global organizations such as IOC/GOOS in governance development. International networks such as EGO for the emerging glider operations should also provide a forum for addressing governance.
- (6)
Automation is being brought forth by various economic sectors and ocean autonomous vehicles will leverage this through technology transition. There are also opportunity for new system concepts which can advance the current autonomous system paradigms.
Recommendation: while maturing current systems, support new and creative concepts, such as the Shearwater hybrid vehicle, through government grant funding and mature these so transition to industry and larger scale production is possible.
Statements
Author contributions
CW led the integration of the manuscript. JP contributed significantly to the overall structure, introduction, sensors, future vision, and recommendations. BF, LG, WK, MA, ED, SH, AMag, PT, SSa, and SSi contributed to AUVs and other platforms. AG and HS contributed to acoustic communications. AMar, FC, and WK contributed to sensors. FM-K, RV, and VN contributed to in situ optical sensors. JP, PT, and SK contributed to data, standards and best practices. BP, HS, and AC contributed to marine renewable energy. SM, AMar, HS, and CW contributed to passive acoustics. All authors contributed to the article and approved the submitted version.
Funding
The open access publication fee was paid by the IEEE Oceanic Engineering Society (OES) on behalf of the OES technology committee for Ocean Observation Systems and Environmental Sustainability. The work was supported in part by National Aeronautics and Space Administration [NASA grants NNX14AP62A to FM-K: “National Marine Sanctuaries as Sentinel Sites for a Demonstration Marine Biodiversity Observation Network (MBON)”], NSF (grant number 1728913) to FM-K and JP, and the Office of Naval Research (grant numbers N00014-20-1-2626, N000141912609, and N00014-18-1-2081) to AG. Work sponsored by the United States Department of Energy’s Water Power Technologies Office to HS and AC underlies our understanding of marine renewable energy’s potential to power autonomous ocean systems.
Acknowledgments
Karen Hiltz and Krista Beardy were invaluable in editing early versions of the manuscript. The authors thank the reviewers for their constructive input which substantially improved the work.
Conflict of interest
CW is employed by JASCO Applied Sciences (Canada) Ltd. LG is currently employed by OceanX Group. ED and SH are employed by Saildrone.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The reviewer CL declared a shared affiliation, with no collaboration, with one of the authors, BP, to the handling editor at time of review.
Footnotes
1.^https://oceandiscovery.xprize.org/
3.^https://inspire.ec.europa.eu/inspire-legislation/26
4.^http://docs.opengeospatial.org/is/15-078r6/15-078r6.html
5.^https://www.seabird.com/nutrient-sensors/suna-nitrate-sensor/family?productCategoryId=54627869922
6.^https://www.trios.de/en/matrixflu-vis.html
7.^https://mclanelabs.com/imaging-flowcytobot/
8.^https://www.sequoiasci.com/product/lisst-200x/
9.^http://www.hydroptic.com/index.php/public/Page/product_item/UVP6-LP
10.^http://www.goosocean.org/eov
11.^https://www.hydro-international.com/content/article/bering-sea-asv-force-multiplier
12.^http://www.imr.no/en/hi/news/2019/april/sends-saildrone-cruising-in-the-north-sea
13.^https://www.fisheries.noaa.gov/feature-story/saildrone-launch-begins-test-improve-west-coast-fisheries-surveys
14.^https://podaac.jpl.nasa.gov/Saildrone
15.^https://www.saildrone.com/news/usv-study-carbon-uptake-southern-ocean
16.^https://www.maritime-executive.com/article/growing-interest-in-auvs-for-oil-and-gas
17.^https://medium.com/dissected-by-propel-x/thermal-recharging-technology-a-game-changing-clean-energy-source-e6002279615a
18.^https://www.energy.gov/sites/prod/files/2017/04/f34/administration-wec-prize.pdf
20.^https://www.cmre.nato.int/news-room/news-room/847-cmre-successfully-demonstrates-systems-for-persistent-autonomous-and-real-time-maritime-surveillance
23.^http://www.opengeospatial.org/standards/puck
24.^https://noc.ac.uk/technology/technology-development/instruments-sensors
25.^http://bts.fer.hr/session/shearwater-the-future-of-hybrid-autonomous-marine-vehicles/
26.^https://www.ecnmag.com/blog/2018/05/navys-underwater-wireless-charging-station-can-improve-remote-uuv-mission-performance
References
1
AinslieM.Miksis-OldsJ.MartinB.HeaneyK.de JongC.von Benda-BeckmanA. (2017). Soundscape and Modeling Metadata Standard. Technical Report by TNO for ADEON Prime Contract No. M16PC00003. Version 2.0 DRAFT. Durham: University of New Hampshire.
2
AkyildizI. F.PompiliD.MelodiaT. (2005). Underwater acoustic sensor networks: research challenges.Ad Hoc Netw.3257–279. 10.1016/j.adhoc.2005.01.004
3
AlbiezJ.JoyeuxS.GaudigC.HilljegerdesJ.KroffkeS.SchooC.et al (2015). “FlatFish - a compact subsea-resident inspection AUV,” in Proceedings of the OCEANS 2015 MTS/IEEE Washington, Washington, DC, 1–8.
4
AlexanderR.Gikuma-NjuruP.ImbergerJ. (2012). Identifying spatial structure in phytoplankton communities using multi-wavelength fluorescence spectral data and principal component analysis.Limnol. Oceanogr. Methods10402–415. 10.4319/lom.2012.10.402
5
Al-HalafiA.ShihadaB. (2018). UHD video transmission over bidirectional underwater wireless optical communication.IEEE Photon. J.101–14. 10.1109/JPHOT.2018.2821695
6
AndersonC. R.BerdaletE.KudelaR. M.CusackC. K.SilkeJ.O’RourkeE.et al (2019). Scaling up from regional case studies to a global harmful algal bloom observing system.Front. Mar. Sci.6:250. 10.3389/fmars.2019.00250
7
AnsariN.GuptaA.GuptaA. S. (2016). Shallow water acoustic channel estimation using two-dimensional frequency characterization.J. Acoust. Soc. Am.1403995–4009. 10.1121/1.4967448
8
AnsariN.GuptaA. S.GuptaA. (2017). “Underwater acoustic channel estimation via CS with prior information,” in Proceedings of the OCEANS 2017 Aberdeen,Aberdeen, 1–5. 10.1109/OCEANSE.2017.8084965
9
AtamanchukD.TengbergA.ThomasP. J.HovdenesJ.ApostolidisA.HuberC.et al (2014). Performance of a lifetime-based optode for measuring partial pressure of carbon dioxide in natural waters.Limnol. Oceanogr. Methods1263–73. 10.4319/lom.2014.12.63
10
AyersJ. M.RichterK. (2016). “The potential of small-scale turbines and microbial fuel cells to support persistent oceanographic sensors,” in Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, 1–6. 10.1109/OCEANS.2016.7761015
11
BabaritA.HalsJ.MuliawanM. J.KurniawanA.MoanT.KrokstadJ. (2012). Numerical benchmarking study of a selection of wave energy converters.Renew. Energy4144–63. 10.1016/j.renene.2011.10.002
12
BachmayerR.YoungB. D.LewisR.WangH.MacNeilL.SobalskiV.et al (2018). “The idea, design and current state of development of an Unmanned Submersible Surface Vehicle: USSC SeaDuck,” in Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, 1–6. 10.1109/AUV.2018.8729732
13
BangeH. W.Arévalo-MartínezD. L.de la PazM.FaríasL.KaiserJ.KockA.et al (2019). A harmonized nitrous oxide (N2O) ocean observation network for the 21st century.Front. Mar. Sci.6:157. 10.3389/fmars.2019.00157
14
BaraniukR. G. (2007). Compressive sensing [Lecture Notes].IEEE Signal Process. Mag.24118–121. 10.1109/MSP.2007.4286571
15
BarbeauM.Garcia-AlfaroJ.KranakisE.PorrettaS. (2018). The Sound of Communication in Underwater Acoustic Sensor Networks. (Cham: Springer), 13–23.
16
BarnesM. A.TurnerC. R. J. C. G. (2016). The ecology of environmental DNA and implications for conservation genetics.Conserv. Genet.171–17. 10.1007/s10592-015-0775-4
17
BeatonA. D.CardwellC. L.ThomasR. S.SiebenV. J.LegiretF.-E.WaughE. M.et al (2012). Lab-on-chip measurement of nitrate and nitrite for in situ analysis of natural waters.Environ. Sci. Technol.469548–9556. 10.1021/es300419u
18
BeebyS. P.TorahR. N.TudorM. J.Glynne-JonesP.DonnellT. O.SahaC. R.et al (2007). A micro electromagnetic generator for vibration energy harvesting.J. Micromech. Microeng.17:1257.
19
Beja-PereiraA.OliveiraR.AlvesP. C.SchwartzM. K.LuikartG. (2009). Advancing ecological understandings through technological transformations in noninvasive genetics.Mol. Ecol. Resour.91279–1301. 10.1111/j.1755-0998.2009.02699.x
20
BellinghamJ. G. (2006). Autonomous Ocean Sampling Network.Moss Landing, CA: Monterey Bay Aquarium Research Institute.
21
Benoit-BirdK. J.LawsonG. L. (2016). Ecological insights from pelagic habitats acquired using active acoustic techniques.Annu. Rev. Mar. Sci.8463–490. 10.1146/annurev-marine-122414-034001
22
BirchJ. (2018). Collecting and processing samples in remote and dangerous places: the Environmental Sample Processor as a case study.Pure Appl. Chem.901625–1630. 10.1515/pac-2018-0201
23
BittigH.KortzingerA.JohnsonK.ClaustreH.EmersonS.FennelK.et al (2015). “SCOR WG 142: quality control procedures for oxygen and other biogeochemical sensors on floats and gliders,” in Recommendation for Oxygen Measurements from Argo Floats, Implementation of in-Air-Measurement Routine to Assure Highest Long-Term Accuracy (Brest: IFREMER). 10.13155/45917
24
BittigH. C.KörtzingerA.NeillC.van OoijenE.PlantJ. N.HahnJ.et al (2018). Oxygen Optode sensors: principle, characterization, calibration, and application in the ocean.Front. Mar. Sci.4:429. 10.3389/fmars.2017.00429
25
BlombergA. E. A.SæbøT. O.HansenR. E.PedersenR. B.AustengA. (2017). Automatic detection of marine gas seeps using an interferometric sidescan sonar.IEEE J. Ocean. Eng.42590–602. 10.1109/JOE.2016.2592559
26
BossE.WaiteA.Muller-KargerF.YamazakiH.WanninkhofR.UitzJ.et al (2018). Beyond chlorophyll fluorescence: the time is right to expand biological measurements in ocean observing programs.Limnol. Oceanogr. Bull.2789–90. 10.1002/lob.10243
27
BoydJ. W. R.VarleyJ. (2001). The uses of passive measurement of acoustic emissions from chemical engineering processes.Chem. Eng. Sci.561749–1767. 10.1016/S0009-2509(00)00540-6
28
BragaJ.BalampanisF.AguiarA. P.SousaJ.MazaI.OlleroA. (2017). “Coordinated efficient buoys data collection in large complex coastal environments using UAVs,” in Proceedings of the OCEANS 2017 - Anchorage, Anchorage, 1–9.
29
BretschneiderS.Marc-AureleF. J.Jr.WuJ. (2005). Best Practices” research: a methodological guide for the perplexed.J. Public Adm. Res. Theory15307–323. 10.1093/jopart/mui017
30
BritoM. P.LewisR. S.BoseN.GriffithsG. (2019). Adaptive autonomous underwater vehicles: an assessment of their effectiveness for oceanographic applications.IEEE Trans. Eng. Manage.6698–111. 10.1109/TEM.2018.2805159
31
BrownJ. D.PasupathyS.PlataniotisK. N. (2006). Adaptive demodulation using rateless erasure codes.IEEE Trans. Commun.541574–1585. 10.1109/TCOMM.2006.881236
32
BrownleeE. F.OlsonR. J.SosikH. M. (2016). Microzooplankton community structure investigated with imaging flow cytometry and automated live-cell staining.Mar. Ecol. Prog. Ser.55065–81. 10.3354/meps11687
33
BuckJ. J. H.BainbridgeS. J.BurgerE. F.KrabergA. C.CasariM.CaseyK. S.et al (2019). Ocean data product integration through innovation-the next level of data interoperability.Front. Mar. Sci.6:32. 10.3389/fmars.2019.00032
34
ButtigiegP. L.PafilisE.LewisS. E.SchildhauerM. P.WallsR. L.MungallC. J. (2016). The environment ontology in 2016: bridging domains with increased scope, semantic density, and interoperation.J. Biomed. Semant.7:57. 10.1186/s13326-016-0097-6
35
CamilliR.ReddyC. M.YoergerD. R.Van MooyB. A. S.JakubaM. V.KinseyJ. C.et al (2010). Tracking hydrocarbon plume transport and biodegradation at deepwater horizon.J. Sci.330201–204. 10.1126/science.1195223
36
CandesE. J.RombergJ.TaoT. (2006). Robust uncertainty principles: exact signal reconstruction from highly incomplete frequency information.IEEE Trans. Inf. Theory52489–509. 10.1109/TIT.2005.862083
37
CaoZ.OuyangB.PrincipeJ. (2017). Unobtrusive Multi-Static Serial LiDAR Imager (UMSLI) First Generation Shape-Matching Based Classifier for 2D Contours. Available at: https://www.osti.gov/servlets/purl/1373095(accessed October 26, 2019).
38
CarreraA.TremoriA.CaamañoP.BeenR.Crespo PereiraD.BruzzoneA. G. (2016). HLA Interoperability for ROS-Based Autonomous Systems. (Berlin: Springer), 128–138.
39
CasturaJ.MaoY.DraperS. (2006). “On rateless coding over fading channels with delay constraints,” in Proceedings of the 2006 IEEE International Symposium on Information Theory, Seattle, WA, 1124–1128.
40
CenturioniL. R.HormannV.TalleyL. D.ArzenoI.BealL.CarusoM.et al (2017). Northern Arabian Sea Circulation-Autonomous Research (NASCar): A Research Initiative Based on Autonomous Sensors.Oceanography3074–87. 10.5670/oceanog.2017.224
41
ChavezF. P.SevadjianJ.WahlC.FriederichJ.FriederichG. E. (2018). Measurements of pCO2 and pH from an autonomous surface vehicle in a coastal upwelling system.Deep Sea Res. Part II Top. Stud. Oceanogr.151137–146. 10.1016/j.dsr2.2017.01.001
42
ChengX.CaoR.QuF.YangL. (2012). “Relay-aided cooperative Underwater acoustic communications: selective relaying,” in Proceedings of the 2012 Oceans - Yeosu, Yeosu, 1–7.
43
ChiangH. L.TapiaL. (2018). COLREG-RRT: an RRT-Based COLREGS-Compliant Motion Planner for Surface Vehicle Navigation.IEEE Robot. Autom. Lett.32024–2031. 10.1109/LRA.2018.2801881
44
ChitreM.MotaniM. (2007). “On the use of rate-less codes in underwater acoustic file transfers,” in Proceedings of the OCEANS 2007 - Europe, Aberdeen, 1–6. 10.1109/OCEANSE.2007.4302275
45
ChitreM.ShahabudeenS.StojanovicM. (2008). Underwater acoustic communications and networking: recent advances and future challenges.Mar. Technol. Soc. J.42103–116. 10.4031/002533208786861263
46
ChuaE. J.SavidgeW.ShortR. T.Cardenas-ValenciaA. M.FulweilerR. W. (2016). A review of the emerging field of underwater mass spectrometry.Front. Mar. Sci.3:209. 10.3389/fmars.2016.00209
47
ColyK. (2016). Echo Voyager: New Frontiers in Unmanned Technology. Marine Technology Reporter Magazine. Frederick, MD: New Wave Media Business Navigator.
48
ConstanziR.FenucciD.ManzariV.MicheliM.MorlandoL.NataleD.et al (2018). “At-Sea NATO operational experimentation with interoperable underwater assets using different robotic Middlewares,” in Proceedings of NAV 2018: 19th International Conference on Ship & Maritime Research Technology and Science for the Ships of the Future, edsMarinòA.BucciV., (Amsterdam: IOS Press), 194.
49
CoppingA.LiVecchiA.SpenceH.GortonA.JenneS.PreusR.et al (2018). Maritime renew. energy markets: power from the sea.Mar. Technol. Soc. J.5299–109. 10.4031/MTSJ.52.5.3
50
CowenR. K.GuigandC. M. (2008). In situ ichthyoplankton imaging system (ISIIS): system design and preliminary results.Limnol. Oceanogr. Methods6126–132. 10.4319/lom.2008.6.126
51
CruzN. A.MatosA. C.AlmeidaR. M.FerreiraB. M. (2017). “A lightweight docking station for a hovering AUV,” in Proceedings of the 2017 IEEE Underwater Technology (UT), Busan, 1–7.
52
CurtinT. B.BellinghamJ. G.CatipovicJ.WebbD. (1993). Autonomous oceanographic sampling networks.Oceanography686–94. 10.5670/oceanog.1993.03
53
DanielT.ManleyJ.TrenamanN. (2011). The Wave Glider: enabling a new approach to persistent ocean observation and research.Ocean Dyn.611509–1520. 10.1007/s10236-011-0408-5
54
DavieA.HartmannK.TimmsG.de GrootM.McCullochJ. (2008). “Benthic habitat mapping with autonomous underwater vehicles,” in Proceedings of the OCEANS 2008, Quebec, 1–9.
55
DavisR. E.ShermanJ. T. (2017). Evaluating a Lithium-Seawater Battery on Gliders.J. Atmos. Ocean. Technol.341175–1182. 10.1175/jtech-d-16-0151.1
56
DeloryE.PearlmanJ. (2018). Challenges and Innovations in Ocean In Situ Sensors: Measuring Inner Ocean Processes and Health in the Digital Age.Amsterdam: Elsevier.
57
deYoungB.von Oppeln-BronikowskiN.MatthewsR.BrianJ.BachmayerR. (2018). Glider operations in the Labrador Sea.J. Ocean Technol.13108–120.
58
DomingoM. C. (2008). Overview of channel models for underwater wireless communication networks.Phys. Commun.1163–182. 10.1016/j.phycom.2008.09.001
59
DonohoD. L.EladM.TemlyakovV. N. (2006). Stable recovery of sparse overcomplete representations in the presence of noise.IEEE Trans. Inf. Theory526–18. 10.1109/TIT.2005.860430
60
D’SpainG. L. (2009). Flying Wing Autonomous Underwater Glider for Basic Research in Ocean Acoustics, Signal/Array Processing, Underwater Autonomous Vehicle Technology, Oceanography, Geophysics, and Marine Biological Studies.San Diego, CA: Scripps Institution of Oceanography.
61
EdwardsD. (2017). Flying-Swimmer (Flimmer) UAV/UUV. Available: https://www.nrl.navy.mil/lasr/content/flying-swimmer-flimmer-uavuuv(accessed November 10, 2018).
62
ErbeC.McCauleyR.GavrilovA. (2016a). “Characterizing Marine Soundscapes,” in The Effects of Noise on Aquatic Life II, edsPopperN. A.HawkinsA., (New York, NY: Springer), 265–271. 10.1007/978-1-4939-2981-8_31
63
ErbeC.McCauleyR.GavrilovA.MadhusudhanaS.VermaA. (2016b). The underwater soundscape around Australia.Proc. Acoust.20169–11.
64
EvansS. J. B.BreierJ.Jr.JakubaM.SaitoM.RobidartJ. (2019). Ocean robots uncover microbial secrets [in special issue: Oceans].Microbiol. Today46, 22–25.
65
FalcãoA. F. D. O. (2010). Wave energy utilization: a review of the technologies.Renew. Sustain. Energy Rev.14899–918. 10.1016/j.rser.2009.11.003
66
FarrN.ChaveA. D.FreitagL.PreisigJ.WhiteS. N.YoergerD.et al (2006). “Optical modem technology for seafloor observatories,” in Proceedings of the OCEANS 2006, Boston, MA, 1–6.
67
FenechH.SonyaA.TomatisA.SoumpholphakdyV.Serrano MerinoJ. L. (2015). “Eutelsat quantum: a game changer,” in Proceedings of the 2015 33rd AIAA International Communications Satellite Systems Conference and Exhibition, Brisbane.
68
FennelK.GehlenM.BrasseurP.BrownC. W.CiavattaS.CossariniG.et al (2019). Advancing marine biogeochemical and ecosystem reanalyses and forecasts as tools for monitoring and managing ecosystem health.Front. Mar. Sci.6:89. 10.3389/fmars.2019.00089
69
FerdinandO. D.FriedrichsA.MirandaM. L.VoßD.ZielinskiO. (2017). “Next generation fluorescence sensor with multiple excitation and emission wavelengths — NeXOS MatrixFlu-UV,” in Proceedings of the OCEANS 2017 - Aberdeen, Aberdeen, 1–6.
70
FerriG.BatesJ.StincoP.TeseiA.LePageK. (2018). “Autonomous underwater surveillance networks: a task allocation framework to manage cooperation,” in Proceedings of the 2018 OCEANS - MTS/IEEE Kobe Techno-Ocean (OTO), Kobe.
71
FooteA. D.ThomsenP. F.SveegaardS.WahlbergM.KielgastJ.KyhnL. A. (2012). Investigating the potential use of environmental DNA (eDNA) for genetic monitoring of marine mammals.PLoS One7:e41781. 10.1371/journal.pone.0041781
72
FreitagL.BallK.PartanJ.KoskiP.SinghS. (2015). “Long range acoustic communications and navigation in the Arctic,” in Proceedings of the OCEANS 2015 - MTS/IEEE Washington, Washington, DC, 1–5.
73
GafurovS. A.KlochkovE. V. (2015). Autonomous unmanned underwater vehicles development tendencies.Procedia Eng.106141–148. 10.1016/j.proeng.2015.06.017
74
GarauB.RuizS.ZhangW. G.PascualA.HeslopE.KerfootJ.et al (2011). Thermal Lag Correction on Slocum CTD Glider Data.J. Atmos. Ocean. Technol.281065–1071. 10.1175/jtech-d-10-05030.1
75
GermanC. R.JakubaM. V.KinseyJ. C.PartanJ.SumanS.BelaniA.et al (2012). “A long term vision for long-range ship-free deep ocean operations: Persistent presence through coordination of Autonomous Surface Vehicles and Autonomous Underwater Vehicles,” in Proceedings of the 2012 IEEE/OES Autonomous Underwater Vehicles (AUV), Tokyo, 1–7.
76
GhaniM. H.HoleL. R.FerI.KourafalouV. H.WiendersN.KangH.et al (2014). The SailBuoy remotely-controlled unmanned vessel: Measurements of near surface temperature, salinity and oxygen concentration in the Northern Gulf of Mexico.Methods Oceanogr.10104–121. 10.1016/j.mio.2014.08.001
77
GrandM. M.Clinton-BaileyG. S.BeatonA. D.SchaapA. M.JohengenT. H.TamburriM. N.et al (2017). A lab-on-chip phosphate analyzer for long-term in situ monitoring at fixed observatories: optimization and performance evaluation in estuarine and oligotrophic coastal waters.Front. Mar. Sci.4:255. 10.3389/fmars.2017.00255
78
GunnK.Stock-WilliamsC. (2012). Quantifying the global wave power resource.Renew. Energy44296–304. 10.1016/j.renene.2012.01.101
79
HallR.BerxB.DamerellG. (2019). Internal tide energy flux over a ridge measured by a co-located ocean glider and moored ADCP.Ocean Sci.151439–1453. 10.5194/os-15-1439-2019
80
HamiltonA. (2017). “Wave-Energy Conversion for Oceanographic Applications,” in Proceedings of the 2017 1st Marine Energy Technology, Washington, DC.
81
HanZ.SunY. L.ShiH. (2008). “Cooperative transmission for underwater acoustic communications,” in Proceedings of the 2008 IEEE International Conference on Communications, Beijing, 2028–2032.
82
HansonJ.Le BrasR.DysartP.BrumbaughD.GaultA.GuernJ. (2001). Operational processing of hydroacoustics at the prototype international data center.J. Pure Appl. Geophys.158425–456. 10.1007/pl00001190
83
HemsleyV. S.SmythT. J.MartinA. P.Frajka-WilliamsE.ThompsonA. F.DamerellG.et al (2015). Estimating oceanic primary production using vertical irradiance and chlorophyll profiles from ocean gliders in the North Atlantic.Environ. Sci. Technol.4911612–11621. 10.1021/acs.est.5b00608
84
HeupelM.LédéeE. J. I.UdyawerV.HarcourtR. (2018). “Acoustic telemetry: an essential sensor in ocean-observing systems,” in Challenges and Innovations in Ocean in Situ Sensors: Measuring Inner Ocean Processes and Health in the Digital Age, edsDeloryE.PearlmanJ., (Amsterdam: Elsevier), 135–146.
85
HobsonB. W.BellinghamJ. G.KieftB.McEwenR.GodinM.ZhangY. (2012). “Tethys-class long range AUVs - extending the endurance of propeller-driven cruising AUVs from days to weeks,” in Proceedings of the 2012 IEEE/OES Autonomous Underwater Vehicles (AUV), Southampton, 1–8.
86
HoleL. R.FerI.PeddieD. (2016). Directional wave measurements using an autonomous vessel.Ocean Dyn.661087–1098. 10.1007/s10236-016-0969-4
87
HoweB. M.Miksis-OldsJ.RehmE.SagenH.WorcesterP. F.HaralabusG. (2019). Observing the oceans acoustically.Front. Mar. Sci.6:426. 10.3389/fmars.2019.00426
88
HuC.VossK. J. (1997). In situ measurements of Raman scattering in clear ocean water.Appl. Opt.366962–6967. 10.1364/AO.36.006962
89
HuangS.ChaudharyK.GarmireL. X. (2017). More is better: recent progress in multi-omics data integration methods.Front. Genet.8:84. 10.3389/fgene.2017.00084
90
HuetC.MastroddiF. (2016). Autonomy for underwater robots—a European perspective.Autonomous Robots401113–1118. 10.1007/s10514-016-9605-x
91
Hunter-CeveraK. R.NeubertM. G.OlsonR. J.SolowA. R.ShalapyonokA.SosikH. M. (2016). Physiological and ecological drivers of early spring blooms of a coastal phytoplankter.Science354326–329. 10.1126/science.aaf8536
92
InzartsevA.PavinA.KleschevA.GribovaV.EliseenkoG. (2016). “Application of artificial intelligence techniques for fault diagnostics of autonomous underwater vehicles,” in Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, 1–6.
93
ISO (2017). ISO 18405:2017 Underwater acoustics –Terminology.Geneva: ISO.
94
JametC.IbrahimA.AhmadZ.AngeliniF.BabinM.BehrenfeldM. J.et al (2019). Going Beyond Standard Ocean Color Observations: Lidar and Polarimetry.Front. Mar. Sci.6:251. 10.3389/fmars.2019.00251
95
JayneS. R.RoemmichD.ZilbermanN.RiserS. C.JohnsonK. S.JohnsonG. C.et al (2017). The Argo program: present and future.Oceanography3018–28. 10.5670/oceanog.2017.213
96
JiangW.ZhengS.ZhouY.TongF.KastnerR. (2018). Exploiting time varying sparsity for underwater acoustic communication via dynamic compressed sensing.J. Acoust. Soc. Am.1433997–4007. 10.1121/1.5042355
97
JirarungsatianC.PrateepasenA. (2010). Pitting and uniform corrosion source recognition using acoustic emission parameters.Corros. Sci.52187–197. 10.1016/j.corsci.2009.09.001
98
JohanssonB.SiesjöJ.FuruholmenM. (2010). “Seaeye Sabertooth A Hybrid AUV/ROV offshore system,” in Proceedings of the Oceans 2010 MTS/IEEE Seattle, Seattle, WA, 1–3.
99
JohnsenG.VolentZ.DierssenH.PettersenR.ArdelanM. V.SøreideF.et al (2013). “20 - Underwater hyperspectral imagery to create biogeochemical maps of seafloor properties,” in Subsea Optics and Imaging, edsWatsonJ.ZielinskiO., (Sawston: Woodhead Publishing), 508e–540e.
100
JohnsonK.ClaustreH. (2016). Bringing biogeochemistry into the Argo age.Eos97(10.1029).
101
JohnsonK. S.ColettiL. J. (2002). In situ ultraviolet spectrophotometry for high resolution and long-term monitoring of nitrate, bromide and bisulfide in the ocean.Deep Sea Res. Part I Oceanogr. Res. Pap.491291–1305. 10.1016/S0967-0637(02)00020-1
102
JohnsonK. S.RiserS. C.KarlD. M. (2010). Nitrate supply from deep to near-surface waters of the North Pacific subtropical gyre.Nature4651062–1065. 10.1038/nature09170
103
JohnsonM. P.TyackP. L. (2003). A digital acoustic recording tag for measuring the response of wild marine mammals to sound.IEEE J. Ocean. Eng.283–12. 10.1109/joe.2002.808212
104
JohnsonR. C.CooksR. G.AllenT. M.CisperM. E.HembergerP. H. (2000). Membrane introduction mass spectrometry: trends and applications.Mass Spectrom. Rev.191–37. 10.1002/(sici)1098-2787(2000)19:1<1::aid-mas1>3.0.co;2-y
105
JoslinJ.CotterE.MurphyP.GibbsP.CavagnaroR.CrispC.et al (2019). “The wave-powered adaptable monitoring package: hardware design, installation, and deployment,”in Proceedings of the 13th European Wave and Tidal Energy Conference, Naples, Italy, 1–6.
106
KadiyamJ.GowthamanD.PunnaP.VenkatesanR. (2015). “Development of Autonomous Ocean Observation Systems(AOS),” in Proceedings of the 2015 IEEE Underwater Technology (UT), Chennai, 1–6. 10.1109/UT.2015.7108269
107
KaiserC. L.YoergerD. R.KinseyJ. C.KelleyS.BillingsA.FujiiJ.et al (2016). “The design and 200 day per year operation of the Autonomous Underwater Vehicle Sentry,” in Proceedings of the 2016 IEEE/OES Autonomous Underwater Vehicles (AUV), Tokyo, 251–260. 10.1109/AUV.2016.7778680
108
KellyR. P.PortJ. A.YamaharaK. M.CrowderL. B. (2014). Using environmental DNA to census marine fishes in a large mesocosm.PLoS One9:e86175. 10.1371/journal.pone.0086175
109
KhanM. J.BhuyanG.IqbalM. T.QuaicoeJ. E. (2009). Hydrokinetic energy conversion systems and assessment of horizontal and vertical axis turbines for river and tidal applications: a technology status review.Appl. Energy861823–1835. 10.1016/j.apenergy.2009.02.017
110
KocakD. M.DalgleishF. R.CaimiF. M.SchechnerY. Y. (2008). A focus on recent developments and trends in underwater imaging.Mar. Technol. Soc. J.4252–67. 10.4031/002533208786861209
111
KrauseB. L. (1993). The niche hypothesis: a virtual symphony of animal sounds, the origins of musical expression and the health of habitats.Soundsc. Newslett.66–10.
112
KrishfieldR.TooleJ.ProshutinskyA.TimmermansM.-L. (2008). Automated ice-tethered profilers for seawater observations under pack ice in all seasons.J. Atmos. Ocean. Technol.252091–2105. 10.1175/2008jtecho587.1
113
KundeT.HeldP.SternbergH.Schneidervon DeimlingJ. (2018). Ammunition detection using high frequency multibeam snippet backscatter information.Mar. Pollut. Bull.133481–490. 10.1016/j.marpolbul.2018.05.063
114
KwasnitschkaT.KöserK.SticklusJ.RothenbeckM.WeißT.WenzlaffE.et al (2016). DeepSurveyCam—a deep ocean optical mapping system.Sensors16:164. 10.3390/s16020164
115
LeeC. M.RudnickD. L. (2018). “Underwater gliders,” in Observing the Oceans in Real Time, edsVenkatesanR.TandonA.D’AsaroE.AtmanandM. A., (Cham: Springer), 123–139.
116
LeeC. M.ThomsonJ.The Marginal Ice Zone Team, and The Arctic Sea State Team, (2017). An autonomous approach to observing the seasonal ice zone in the Western Arctic.Oceanography3056–68. 10.5670/oceanog.2017.222
117
LegiretF.-E.SiebenV. J.WoodwardE. M. S.Abi Kaed, BeyS. K.MowlemM. C.et al (2013). A high performance microfluidic analyser for phosphate measurements in marine waters using the vanadomolybdate method.Talanta116382–387. 10.1016/j.talanta.2013.05.004
118
LePageK. (2018). “On board real-time assessment of acoustic environmental parameters relevant to the estimation of sonar performance for autonomous underwater vehicles,” in Proceedings of the OCEANS’18 MTS/IEEE Kobe, Kobe.
119
LePageK. D.GoldhahnR.AlvesJ.StrodeC.BracaP.FerriG.et al (2015). “Autonomous networked anti-submarine warfare research and development at CMRE,” in Proceedings of the OCEANS 2015 - Genova, Genova, 1–6.
120
LevinL. A.BettB. J.GatesA. R.HeimbachP.HoweB. M.JanssenF.et al (2019). Global observing needs in the deep ocean.Front. Mar. Sci.6:241.
121
LiY.JinZ.SuY.YangM.XiaoS. (2017). An environment-friendly multipath routing protocol for underwater acoustic sensor network.J. Sens.2017:9527480. 10.1155/2017/9527480
122
LiblikT.KarstensenJ.TestorP.AleniusP.HayesD.RuizS.et al (2016). Potential for an underwater glider component as part of the Global Ocean Observing System.Methods Oceanogr.1750–82. 10.1016/j.mio.2016.05.001
123
LindstromE.GunnJ.FischerA.McCurdyA.GloverL. (2012). A Framework for Ocean Observing. By the Task Team for an Integrated Framework for Sustained Ocean Observing.Paris: UNESCO. 10.5270/OceanObs09-FOO
124
LindstromE. J.ShcherbinaA. Y.RainvilleL.FarrarJ. T.CenturioniL. R.DongS.et al (2017). Autonomous multi-platform observations during the salinity processes in the upper-ocean regional study.Oceanography3038–48. 10.5670/oceanog.2017.218
125
LiuZ.ZhangY.YuX.YuanC. (2016). Unmanned surface vehicles: an overview of developments and challenges.Annu. Rev. Control4171–93. 10.1016/j.arcontrol.2016.04.018
126
LiVecchiA.CoppingA.JenneD.GortonA.PreusR.GillG.et al (2019). Powering the Blue Economy; Exploring Opportunities for Marine Renew. Energy in Maritime Markets. (Washington, DC: U.S. Department of Energy).
127
LloretJ.SendraS.ArdidM.RodriguesJ. J. (2012). Underwater wireless sensor communications in the 2.4 GHz ISM frequency band.Sensors124237–4264. 10.3390/s120404237
128
LombardF.BossE.WaiteA. M.VogtM.UitzJ.StemmannL.et al (2019). Globally consistent quantitative observations of planktonic ecosystems.Front. Mar. Sci.6:196. 10.3389/fmars.2019.00196
129
LudvigsenM.AlbrektsenS. M.CisekK.JohansenT. A.NorgrenP.SkjetneR.et al (2016). “Network of heterogeneous autonomous vehicles for marine research and management,” in Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, 1–7.
130
MaJ.AdornatoL.ByrneR. H.YuanD. (2014). Determination of nanomolar levels of nutrients in seawater.TrAC Trends Anal. Chem.601–15. 10.1016/j.trac.2014.04.013
131
MaguerA.BeenR.TeseiA.AlvesJ.GrandiV.BiaginiS. (2018). “Recent technological advances in Underwater Autonomy,” in Proceedings of the OCEANS 2018 Kobe, Kobe.
132
ManalangD.DelaneyJ.MarburgA.NawazA. (2018). “Resident AUV Workshop 2018: applications and a Path Forward,” in Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, 1–6.
133
ManalangD.DelaneyJ. R. (2016). “Axial seamount - restless, wired and occupied: A conceptual overview of resident AUV operations and technologies,” in Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, 1–7.
134
MankinsJ. C. (1995). Technology Readiness Levels.Washington, DC: NASA.
135
ManleyJ. E. (2008). “Unmanned surface vehicles, 15 years of development,” in Proceedings of the OCEANS 2008, Quebec, 1–4.
136
ManwellJ. F.McGowanJ. G.RogersA. L. (2010). Wind Energy Explained: Theory, Design and Application.Hoboken, NJ: John Wiley & Sons.
137
MarouchosA.SherlockM.KloserR.RyanT.CordellJ. (2016). “A profiling acoustic and optical system (pAOS) for pelagic studies; Prototype development and testing”, in: Proceedings of the OCEANS 2016 - Shanghai, Shanghai,1–6.
138
MarquesT.LimaK.RibeiroM.FerreiraA. S.SousaJ. B.MendesR. (2018). “Characterization of highly dynamic coastal environments, employing teams of heterogeneous vehicles: a holistic case study,” in Proceedings of the 2018 OCEANS - MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, 1–8.
139
MarquesT. A.MungerL.ThomasL.WigginsS.HildebrandJ. A. (2011). Estimating North Pacific right whale Eubalaena japonica density using passive acoustic cue counting.Endangered Species Res.13163–172. 10.3354/esr00325
140
MarquesT. A.ThomasL.WardJ.DiMarzioN.TyackP. L. (2009). Estimating cetacean population density using fixed passive acoustic sensors: An example with Blainville’s beaked whales.J. Acoust. Soc. Am.1251982–1994. 10.1121/1.3089590
141
MasudaY. (1986). “An experience of wave power generator through tests and improvement,” in Hydrodynamics of Ocean Wave-Energy Utilization, edsEvansD. V.de FalcãoA. F. O., (Berlin: Springer), 445–452. 10.1007/978-3-642-82666-5_36
142
MaximenkoN.CorradiP.LawK. L.Van SebilleE.GarabaS. P.LampittR. S.et al (2019). Toward the integrated marine debris observing system.Front. Mar. Sci.6:447. 10.3389/fmars.2019.00447
143
MayerL.JakobssonM.AllenG.DorschelB.FalconerR.FerriniV.et al (2018). The Nippon Foundation—GEBCO Seabed 2030 project: the quest to see the world’s oceans completely mapped by 2030.Geosciences8:63. 10.3390/geosciences8020063
144
MBARI (2018). Autonomous Underwater Vehicle Docking [Online]. Monterey Bay Aquarium Research Institute. Available: https://www.mbari.org/autonomous-underwater-vehicle-docking/(accessed November 12, 2018).
145
McDougallT.FeistelR.MilleroF.JackettD.WrightD.KingB.et al (2009). The International Thermodynamic Equation of Seawater 2010 (TEOS-10): Calculation and Use of Thermodynamic Properties. Global Ship-Based Repeat Hydrography Manual, IOCCP Report No 14. Paris: UNESCO.
146
McKelvieI. D.PeatD. M. W.MatthewsG. P.WorsfoldP. J. (1997). Elimination of the Schlieren effect in the determination of reactive phosphorus in estuarine waters by flow-injection analysis.Anal. Chim. Acta351265–271. 10.1016/S0003-2670(97)00371-1
147
MeinigC.Lawrence-SlavasN.JenkinsR.TabisolaH. M. (2015). “The use of Saildrones to examine spring conditions in the Bering Sea: Vehicle specification and mission performance,” in Proceedings of the OCEANS 2015 - MTS/IEEE Washington, Washington, DC,1–6.
148
MelodiaT.KulhandjianH.KuoL.DemirorsE. (2013). “Advances in underwater acoustic networking,” in Mobile Ad Hoc Networking: Cutting Edge Directions, edsBasagniS.ContiM.GiordanoS.StojmenovicI., (Hoboken, NJ: John Wiley and Sons, Inc).
149
Miksis-OldsJ. L.MartinB.TyackP. L. (2018). Exploring the ocean through soundscapes.Acoust. Today1426–34.
150
MolineM. A.Benoit-BirdK. (2016). Sensor fusion and autonomy as a powerful combination for biological assessment in the marine environment.Robotics5:4. 10.3390/robotics5010004
151
MooreC.BarnardA. H.FietzekP.LewisM. R.SosikH. M.WhiteS. N.et al (2009). Optical tools for ocean monitoring and research.Ocean Sci.5659–717. 10.5194/osd-5-659-2008
152
MordyC. W.CokeletE. D.De RobertisA.JenkinsR.KuhnC. E.Lawrence-SlavasN.et al (2017). Advances in ecosystem research: saildrone Surveys of Oceanography. Fish, and Marine Mammals in the Bering Sea. Oceanography30113–115.
153
MortazaviH.OakleyJ. P.BarkatB. (2013). Mitigating the effect of optical back-scatter in multispectral underwater imaging.Meas. Sci. Technol.24:074025. 10.1088/0957-0233/24/7/074025
154
MowlemM.SchaapA.BeatonA. (2018). “Microfuildics-Based Sensors: A Lab on a Chip,” in Challenges and Innovations in Ocean In Situ Sensors: Measuring Inner Ocean Processes and Health in the Digital Age, edsDeloryE.PearlmanJ., (Amsterdam: Elsevier), 64–80.
155
Muller-KargerF. E.MariaT. K.EnriqueM.WilliamM. B.MyaB.FranciscoP. C.et al (2014). A framework for a marine biodiversity observing network within changing continental shelf seascapes.Oceanography2718–23. 10.5670/oceanog.2014.56
156
Muller-KargerF. E.MiloslavichP.BaxN. J.SimmonsS.CostelloM. J.Sousa PintoI.et al (2018). Advancing marine biological observations and data requirements of the complementary essential ocean variables (EOVs) and Essential Biodiversity Variables (EBVs) Frameworks.Front. Mar. Sci.5:211. 10.3389/fmars.2018.00211
157
NakamuraK.TokiT.MochizukiN.AsadaM.IshibashiJ.-I.NogiY.et al (2013). Discovery of a new hydrothermal vent based on an underwater, high-resolution geophysical survey.Deep Sea Res. Part I Oceanogr. Res. Pap.741–10. 10.1016/j.dsr.2012.12.003
158
National Research Council (2009). Ship Time Costs and Their Impacts. Science at Sea: Meeting Future Oceanographic Goals with a Robust Academic Research Fleet, (Washington, DC: The National Academies Press), 120.
159
National Science and Technology Council (2018). Science and Technology for America’s Oceans: A Decadal Vision. (Washington, DC: National Science and Technology Council).
160
NATO (2017). ANEP-87 - Digital Underwater Signalling Standard for Network Node Discovery & Interoperability. Brussels: NATO Standardization Office.
161
NystuenJ. A.McPhadenM. J.FreitagH. P. (2000). Surface measurements of precipitation from an ocean mooring: the underwater acoustic log from the South China Sea.J. Appl. Meteor.392182–2197. 10.1175/1520-0450(2001)040<2182:smopfa>2.0.co;2
162
OkazakiR. R.SuttonA. J.FeelyR. A.DicksonA. G.AlinS. R.SabineC. L.et al (2017). Evaluation of marine pH sensors under controlled and natural conditions for the Wendy Schmidt Ocean Health XPRIZE.Limnol. Oceanogr. Methods15586–600. 10.1002/lom3.10189
163
ONR (2018). Office of Naval Research Award Number: N00014-18-1–2169.Arlington, VA: ONR.
164
PackardG. E.StokeyR.ChristensonR.JaffreF.PurcellM.LittlefieldR. (2010). ““Hull inspection and confined area search capabilities of REMUS autonomous underwater vehicle”,” in Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, 1–4.
165
PaleyD. A.ZhangF.LeonardN. E. (2008). Cooperative control for ocean sampling: The glider coordinated control system.IEEE Trans. Control Syst. Technol.16735–744. 10.1109/tcst.2007.912238
166
ParksS. E.Miksis-OldsJ. L.DenesS. L. (2014). Assessing marine ecosystem acoustic diversity across ocean basins.Ecol. Inf.2181–88. 10.1016/j.ecoinf.2013.11.003
167
PascualA.RuizS.OlitaA.TroupinC.ClaretM.CasasB.et al (2017). A Multiplatform Experiment to Unravel Meso- and Submesoscale Processes in an Intense Front (AlborEx).Front. Mar. Sci.4:39. 10.3389/fmars.2017.00039
168
PearlmanJ.BushnellM.CoppolaL.KarstensenJ.ButtigiegP. L.PearlmanF.et al (2019). Evolving and Sustaining Ocean Best Practices and Standards for the Next Decade.Front. Mar. Sci.6:277. 10.3389/fmars.2019.00277
169
PearlmanJ.PearlmanF.FerdinandO.ZielinskiO.DeloryE.MemeS.et al (2017). “NeXOS, developing and evaluating a new generation of in-situ ocean observation systems,” in Proceedings of the OCEANS 2017 - Aberdeen, Aberdeen, 1–10.
170
PearlmanJ.ZielinskiO. (2017). A New Generation of Optical Systems for Ocean Monitoring Matrix Fluorescence for Multifunctional Ocean Sensing.Arlington, VA: Compass Publications, Inc.
171
PearlmanJ. S.ButtigiegP. L.SimpsonP.MasC. M.HeslopE.HermesJ. (2017). “Accessing existing and emerging best practices for ocean observation a new approach for end-to-end management of best practices,” in Proceedings of the OCEANS 2017 - Anchorage, Anchorage,1–7.
172
PhilipsA.SteensonL.RogersE.TurnockS.HarrisC.FurlongM. (2013). Delphin2: an over actuated autonomous underwater vehicle for manoeuvring research.Trans. R. Inst. Naval Arch. Int. J. Maritime Eng.155171–180.
173
PhillipsA.SalavasidisG.KingslandM.HarrisC.PebodyM.RoperD.et al (2018). “Autonomous surface/subsurface survey system field trials,” in Proceedings of the 2018 IEEE OES Autonomous Underwater Vehicle Symposium, Porto.
174
PhillipsA. B.HaroutunianM.MurphyA. J.BoydS. W.BlakeJ. I. R.GriffithsG. (2017). Understanding the power requirements of autonomous underwater systems, Part I: an analytical model for optimum swimming speeds and cost of transport.Ocean Eng.133271–279. 10.1016/j.oceaneng.2015.12.014
175
PicheralM.GuidiL.StemmannL.KarlD. M.IddaoudG.GorskyG. (2010). The Underwater Vision Profiler 5: an advanced instrument for high spatial resolution studies of particle size spectra and zooplankton.Limnol. Oceanogr. Methods8462–473. 10.4319/lom.2010.8.462
176
PirenneB.HoeberechtsM.KalmbachA.SadhuT.Branzan AlbuA.GlotinH.et al (2015). “Automated video quality assessment for deep-sea video,” in Proceedings of the 2015 American Geophysical Union, Fall Meeting, San Francisco, CA.
177
PorterM. E. (1985). Competitive Advantage: Creating and Sustaining Superior Performance.New York, NY: Free Press.
178
PrecheurH.DeloryE. (2018). “An autonomous optical sensor for high accuracy ph measurement,” in Challenges and Innovations in Ocean in Situ Sensors: Measuring Inner Ocean Processes and Health in the Digital Age, edsDeloryE.PearlmanJ., (Amsterdam: Elsevier), 28–37.
179
PulsiferP. L.ParsonsM.BerkmanP.TaylorD. R. F. (2019). Geographical Information Management in Polar Regions: Mediation, Data Sharing and Interoperability.Amsterdam: Elsevier.
180
PurserA.MarconY.DreutterS.HogeU.SablotnyB.HehemannL.et al (2019). Ocean Floor Observation and Bathymetry System (OFOBS): a new towed camera/sonar system for deep-sea habitat surveys.IEEE J. Ocean. Eng.4487–99. 10.1109/JOE.2018.2794095
181
RampS. R.DavisR. E.LeonardN. E.ShulmanI.ChaoY.RobinsonA. R.et al (2009). Preparing to predict: The Second Autonomous Ocean Sampling Network (AOSN-II) experiment in the Monterey Bay.Deep Sea Res. Part II Top. Stud. Oceanogr.5668–86. 10.1016/j.dsr2.2008.08.013
182
RazykovT. M.FerekidesC. S.MorelD.StefanakosE.UllalH. S.UpadhyayaH. M. (2011). Solar photovoltaic electricity: current status and future prospects.Solar Energy851580–1608. 10.1016/j.solener.2010.12.002
183
RidaoP.CarrerasM.RibasD.SanzP. J.OliverG. (2015). Intervention AUVs: The next challenge.Annu. Rev. Control40227–241. 10.1016/j.arcontrol.2015.09.015
184
RíoJ. D.TomaD. M.MartínezE.O’ReillyT. C.DeloryE.PearlmanJ. S.et al (2018). A sensor web architecture for integrating smart oceanographic sensors into the semantic sensor web.IEEE J. Ocean. Eng.43830–842. 10.1109/JOE.2017.2768178
185
RiserS. C.FreelandH. J.RoemmichD.WijffelsS.TroisiA.BelbéochM.et al (2016). Fifteen years of ocean observations with the global Argo array.Nat. Clim. Change6145–153. 10.1038/nclimate2872
186
RoemmichD.AlfordM.ClaustreH.JohnsonK.KingB.MoumJ.et al (2019). On the future of Argo: A global, full-depth, multi-disciplinary array.Front. Mar. Sci.6:439. 10.3389/fmars.2019.00439
187
RoemmichD.JohnsonG. C.RiserS.DavisR.GilsonJ.OwensW. B.et al (2009). The Argo Program Observing the Global Ocean with Profiling Floats.Oceanography2234–43. 10.5670/oceanog.2009.36
188
RoperD. T.PhillipsA. B.HarrisC. A.SalavasidisG.PebodyM.TempletonR.et al (2017). “Autosub long range 1500: an ultra-endurance AUV with 6000 Km range,” in Proceedings of the OCEANS 2017 - Aberdeen, Aberdeen,1–5.
189
RudnickD. L. (2016). Ocean research enabled by underwater gliders.Annu. Rev. Mar. Sci.8519–541. 10.1146/annurev-marine-122414-033913
190
SabaG. K.Wright-FairbanksE.MilesT. N.ChenB.CaiW.WangK.et al (2018). “Developing a profiling glider pH sensor for high resolution coastal ocean acidification monitoring,” in Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, 1–8.
191
SalavasidisG.MunafòA.HarrisC. A.PrampartT.TempletonR.SmartM.et al (2019). Terrain-aided navigation for long-endurance and deep-rated autonomous underwater vehicles.J. Field Robot.36447–474. 10.1002/rob.21832
192
SasanoM.ImasatoM.YamanoH.OgumaH. (2016). Development of a regional coral observation method by a fluorescence imaging LIDAR Installed in a Towable Buoy.Remote Sens.8:48. 10.3390/rs8010048
193
SauserB. (2010). A Hybrid Underwater Robot. Available at: https://www.technologyreview.com/s/421575/a-hybrid-underwater-robot/(accessed November 08, 2018).
194
SchmidC.MolinariR. L.SabinaR.DaneshzadehY.-H.XiaX.FortezaE.et al (2007). The real-time data management system for Argo profiling float observations.J. Atmos. Ocean. Technol.241608–1628. 10.1175/jtech2070.1
195
Schmidt Ocean Institute (2018). Fleet of Aerial, Surface, and Underwater Robots Maps Ocean Front. Available at: www.sciencedaily.com/releases/2018/07/180703110044.htm(accessed October 17, 2018).
196
SchofieldO.GlennS.OrcuttJ.ArrottM.MeisingerM.GangopadhyayA.et al (2010). Automated sensor network to advance ocean science.Trans. Am. Geophys. Union91345–346.
197
ScholinC. A. (2013). “Ecogenomic Sensors,” in Encyclopedia of Biodiversity, 2nd Edn, ed.LevinS. A., (Waltham, MA: Academic Press), 690–700. 10.1016/b978-0-12-384719-5.00408-1
198
ScholinC. A.BirchJ.JensenS.MarinR.MassionE.PargettD.et al (2017). The Quest To Develop Ecogenomic Sensors: a 25-Year History of the Environmental Sample Processor (ESP) as a Case Study.Oceanography30100–113. 10.5670/oceanog.2017.427
199
Sen GuptaA.PreisigJ. (2012). A geometric mixed norm approach to shallow water acoustic channel estimation and tracking.Phys. Commun.5119–128. 10.1016/j.phycom.2011.10.005
200
ShahS.JohnsonE. (2009). “3-D Obstacle Detection Using a Single Camera,” in Proceedings of the AIAA Guidance, Navigation, and Control Conference (American Institute of Aeronautics and Astronautics), Minneapolis, MN.
201
SherlockB.NeashamJ. A.TsimenidisC. C. (2018). Spread-spectrum techniques for bio-friendly underwater acoustic communications.IEEE Access64506–4520. 10.1109/ACCESS.2018.2790478
202
SherlockM.RyanT.KloserR. (2010). “A combined acoustic and optical instrument for fisheries studies,” in Proceedings of the OCEANS’10 IEEE Sydney, Sydney, 1–5.
203
ShortR. T.BellR. J.KibelkaG. P. G.TolerS. K. (2018). “Challenges and applications of underwater mass spectrometry,” in Challenges and Innovations in Ocean In Situ Sensors: Measuring Inner Ocean Processes and Health in the Digital Age, edsDeloryE.PearlmanJ., (Amsterdam: Elsevier), 37–49.
204
ShortR. T.FriesD. P.TolerS. K.LembkeC. E.ByrneR. H. (1999). Development of an underwater mass-spectrometry system for in situ chemical analysis.Meas. Sci. Technol.101195–1201. 10.1088/0957-0233/10/12/311
205
SimpsonP.PearlmanF.PearlmanJ. (eds) (2018). Evolving and Sustaining Ocean Best Practices Workshop 15–17 November 2017.Paris: Intergovernmental Oceanographic Commission.
206
SimpsonP.PearlmanF.PearlmanJ. (eds) (2019). Evolving and Sustaining Ocean Best Practices Workshop II, 04–06 December 2018.Paris: Intergovernmental Oceanographic Commission.
207
SingerA. C.NelsonJ. K.KozatS. S. (2009). Signal processing for underwater acoustic communications.IEEE Commun. Mag.4790–96. 10.1109/MCOM.2009.4752683
208
SosikH. M.OlsonR. J. (2007). Automated taxonomic classification of phytoplankton sampled with imaging-in-flow cytometry.Limnol. Oceanogr. Methods5204–216. 10.4319/lom.2007.5.204
209
StojanovicM. (2007). “Capacity of a relay acoustic channel,” in Proceedings of the OCEANS 2007, Vancouver, 1–7.
210
StommelH. (1989). The slocum mission.Oceanography222–25. 10.5670/oceanog.1989.26
211
StromB.BruntonS. L.PolagyeB. (2017). Intracycle angular velocity control of cross-flow turbines.Nat. Energy2:17103. 10.1038/nenergy.2017.103
212
SukhovichA.IrissonJ.-O.PerrotJ.NoletG. (2014). Automatic recognition of T and teleseismic P waves by statistical analysis of their spectra: an application to continuous records of moored hydrophones.J. Geophys. Res. Solid Earth1196469–6485. 10.1002/2013JB010936
213
SunX.HuangD.WuG. (2012). The current state of offshore wind energy technology development.Energy41298–312. 10.1016/j.energy.2012.02.054
214
TanhuaT.McCurdyA.FischerA.AppeltansW.BaxN.CurrieK.et al (2019). What we have learned from the framework for ocean observing: evolution of the global ocean observing system.Front. Mar. Sci.6:471. 10.3389/fmars.2019.00471
215
TestorP.BosseA.HoupertL.MargirierF.MortierL.LegoffH.et al (2018). Multiscale observations of deep convection in the northwestern mediterranean sea during winter 2012–2013 using multiple platforms.J. Geophys. Res. Oceans1231745–1776. 10.1002/2016JC012671
216
TestorP.DeYoungB.RudnickD. L.GlennS.HayesD.LeeC.et al (2019). OceanGliders: a component of the integrated GOOS.Front. Mar. Sci.6:422. 10.3389/fmars.2019.00422
217
TestorP.MeyersG.PattiaratchiC.BachmayerR.HayesD.PouliquenS.et al (2010). “Gliders as a component of future observing systems,” in Proceedings of the OceanObs’ 09: Sustained Ocean Observations and Information for Society, edsHallJ.HarrisonD. E.StammerD., (Venice: ESA Publication), 21–25.
218
ThompsonD.CaressD.ThomasH.ConlinD. (2015). “MBARI mapping AUV operations in the gulf of California 2015,” in Proceedings of the OCEANS 2015 - MTS/IEEE Washington, Washington, DC, 1–7.
219
ThomsenP. F.KielgastJ.IversenL. L.MøllerP. R.RasmussenM.WillerslevE. (2012). Detection of a diverse marine fish fauna using environmental DNA from seawater samples.PLoS One7:e41732. 10.1371/journal.pone.0041732
220
ThurnherrA. M.SymondsD.LaurentL. S. (2015). “Processing explorer ADCP data collected on slocum gliders using the LADCP shear method,” in Proceedings of the 2015 IEEE/OES Eleveth Current, Waves and Turbulence Measurement (CWTM), St. Petersburg, FL, 1–7.
221
TilbrookB.JewettE. B.DeGrandpreM. D.Hernandez-AyonJ. M.FeelyR. A.GledhillD. K.et al (2019). An enhanced ocean acidification observing network: from people to technology to data synthesis and information exchange.Front. Mar. Sci.6:337. 10.3389/fmars.2019.00337
222
TintoréJ.CasasB.HeslopE.VizosoG.PascualA.OrfilaA.et al (2013). “The impact of new multi-platform observing systems in science, technology development and response to society needs; from small to large scales…,” in Computer Aided Systems Theory - EUROCAST 2013, edsMoreno-DíazR.PichlerF.Quesada-ArencibiaA., (Berlin: Springer), 341–348. 10.1007/978-3-642-53862-9_44
223
TomaD. M.RíoJ. D.CarrerasN.CorradinoL.BraulteP.DeloryE.et al (2015). “Multi-platform underwater passive acoustics instrument for a more cost-efficient assessment of ocean ecosystems,” in Proceedings of the 2015 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Pisa, 969–974.
224
UnderwoodM.MarouchosA. (2017). “Tools and technologies for ocean observations,” in Oceans: Science and Solutions for Australia, ed.MapstoneB., (Clayton: CSIRO Publishing), 211.
225
UnderwoodM.SherlockM.MarouchosA.CordellJ.KloserR.OceansT. R. (2015). “A combined acoustic and optical instrument for industry managed fisheries studies,” in Proceedings of the OCEANS 2015-Genova, Genova, 1–5.
226
United Nations (2015). Transforming Our World: The 2030 Agenda for Sustainable Development. General Assembley 70 session.New York, NY: United Nations.
227
USIOOS (2017). QARTOD Project Plan: Accomplishments for 2012-2016 and Update for 2017-2021.Silver Spring, MD: U.S. Integrated Ocean Observing System. 10.7289/V5JQ0Z71
228
VajapeyamM.VedantamS.MitraU.PreisigJ. C.StojanovicM. (2008). Distributed space–time cooperative schemes for underwater acoustic communications.IEEE J. Ocean. Eng.33489–501. 10.1109/JOE.2008.2005338
229
VedachalamN.RameshR.JyothiV. B. N.Doss PrakashV.RamadassG. A. (2018). Autonomous underwater vehicles - challenging developments and technological maturity towards strategic swarm robotics systems.Mar. Georesourc. Geotechnol.37525–538. 10.1080/1064119X.2018.1453567
230
VegaL. A. (2002). Ocean thermal energy conversion primer.Mar. Technol. Soc. J.3625–35. 10.4031/002533202787908626
231
VerfussU. K.AnicetoA. S.HarrisD. V.GillespieD.FieldingS.JiménezG.et al (2019). A review of unmanned vehicles for the detection and monitoring of marine fauna.Mar. Pollut. Bull.14017–29. 10.1016/j.marpolbul.2019.01.009
232
VillarealT. A.WilsonC. (2014). A Comparison of the Pac-X Trans-Pacific Wave Glider Data and Satellite Data (MODIS, Aquarius, TRMM and VIIRS).PLoS One9:e92280. 10.1371/journal.pone.0092280
233
VisbeckM. (2018). Ocean science research is key for a sustainable future.Nat. Commun.9:690. 10.1038/s41467-018-03158-3153
234
WangP.FengW.ZhangL.LiV. O. K. (2011). “Asynchronous cooperative transmission in underwater acoustic networks,” in Proceedings of the 2011 IEEE Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, 1–8.
235
WebbD. C.SimonettiP. J.JonesC. P. (2001). SLOCUM: An underwater glider propelled by environmental energy.IEEE J. Ocean. Eng.26447–452. 10.1109/48.972077
236
WeddingL. M.JorgensenS.LepczykC. A.FriedlanderA. M. (2019). Remote sensing of three-dimensional coral reef structure enhances predictive modeling of fish assemblages.Remote Sens. Ecol. Conserv.5150–159. 10.1002/rse2.115
237
WeislerW.StewartW.AndersonM. B.PetersK. J.GopalarathnamA.BryantM. (2018). Testing and characterization of a fixed wing cross-domain unmanned vehicle operating in aerial and underwater environments.IEEE J. Ocean. Eng.43969–982. 10.1109/JOE.2017.2742798
238
WhiteS. N.KirkwoodW.ShermanA.BrownM.HenthornR.SalamyK. A.et al (2004). “Laser Raman spectroscopic instrumentation for in situ geochemical analyses in the deep ocean,” in Proceedings of the Oceans ’04 MTS/IEEE Techno-Ocean ’04, Vol. 101Kobe, 95–100.
239
WilkinsonM. D.DumontierM.AalbersbergI. J.AppletonG.AxtonM.BaakA.et al (2016). The FAIR Guiding Principles for scientific data management and stewardship.Sci. Data3:160018. 10.1038/sdata.2016.18
240
WölflA.-C.SnaithH.AmirebrahimiS.DeveyC. W.DorschelB.FerriniV.et al (2019). Seafloor Mapping–the challenge of a truly global ocean bathymetry.Front. Mar. Sci.6:283.
241
WorsfoldP.McKelvieI.MonbetP. (2016). Determination of phosphorus in natural waters: a historical review.Anal. Chim. Acta9188–20. 10.1016/j.aca.2016.02.047
242
WuF.YangK.TongF.TianT. (2018). Compressed sensing of delay and doppler spreading in underwater acoustic channels.IEEE Access636031–36038. 10.1109/ACCESS.2018.2850929
243
WynnR. B.HuvenneV. A. I.Le BasT. P.MurtonB. J.ConnellyD. P.BettB. J.et al (2014). Autonomous Underwater Vehicles (AUVs): their past, present and future contributions to the advancement of marine geoscience.Mar. Geol.352451–468. 10.1016/j.margeo.2014.03.012
244
XingX.-G.ClaustreH.BossE.ChaiF. (2018). Toward deeper development of biogeochemical-argo floats. Atmos. Ocean. Sci. Lett.11, 287–290. 10.1080/16742834.2018.1457932
245
XieY.WuS.-J.YangC.-J. (2016). Generation of electricity from deep-sea hydrothermal vents with a thermoelectric converter.Appl. Energy164620–627. 10.1016/j.apenergy.2015.12.036
246
ZappalàG.CarusoG.BonamanoS.MadoniaA.PiermatteiV.MartellucciR.et al (2016). A multi-platform approach to marine environment assessment in the Civitavecchia (Rome) area.J. Oper. Oceanogr.9s131–s143. 10.1080/1755876X.2015.1119561
247
ZhangX.KirkwoodW. J.WalzP. M.PeltzerE. T.BrewerP. G. (2012). A review of advances in deep-ocean Raman spectroscopy.Appl. Spectrosc.66237–249. 10.1366/11-06539
248
ZhangY.GodinM. A.BellinghamJ. G.RyanJ. P. (2012). Using an autonomous underwater vehicle to track a coastal upwelling front.IEEE J. Ocean. Eng.37338–347. 10.1109/JOE.2012.2197272
249
ZhouY.-H.JiangW.-H.TongF.ZhangG.-Q. (2017a). Exploiting joint sparsity for underwater acoustic MIMO communications.Appl. Acoust.116357–363. 10.1016/j.apacoust.2016.10.010
250
ZhouY.-H.TongF.ZhangG.-Q. (2017b). Distributed compressed sensing estimation of underwater acoustic OFDM channel.Appl. Acoust.117160–166. 10.1016/j.apacoust.2016.10.021
Summary
Keywords
autonomous and remotely operated vehicle, autonomous platforms, ocean observation, OceanObs’19, observing systems and networks, future vision
Citation
Whitt C, Pearlman J, Polagye B, Caimi F, Muller-Karger F, Copping A, Spence H, Madhusudhana S, Kirkwood W, Grosjean L, Fiaz BM, Singh S, Singh S, Manalang D, Gupta AS, Maguer A, Buck JJH, Marouchos A, Atmanand MA, Venkatesan R, Narayanaswamy V, Testor P, Douglas E, de Halleux S and Khalsa SJ (2020) Future Vision for Autonomous Ocean Observations. Front. Mar. Sci. 7:697. doi: 10.3389/fmars.2020.00697
Received
16 November 2018
Accepted
31 July 2020
Published
08 September 2020
Volume
7 - 2020
Edited by
Ananda Pascual, Mediterranean Institute for Advanced Studies (IMEDEA), Spain
Reviewed by
Craig Michael Lee, University of Washington, United States; Antonio Olita, Institute of Atmospheric Sciences and Climate (CNR-ISAC), Italy
Updates
Copyright
© 2020 Whitt, Pearlman, Polagye, Caimi, Muller-Karger, Copping, Spence, Madhusudhana, Kirkwood, Grosjean, Fiaz, Singh, Singh, Manalang, Gupta, Maguer, Buck, Marouchos, Atmanand, Venkatesan, Narayanaswamy, Testor, Douglas, de Halleux and Khalsa.
This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Christopher Whitt, cwhitt@ieee.org; christopher@whitt.ca
This article was submitted to Ocean Observation, a section of the journal Frontiers in Marine Science
Disclaimer
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.