 Javier López-Randulfe
Javier López-Randulfe Tobias Duswald†
Tobias Duswald† Zhenshan Bing
Zhenshan Bing Alois Knoll
Alois Knoll- Department of Informatics, Technical University of Munich, Munich, Germany
The development of advanced autonomous driving applications is hindered by the complex temporal structure of sensory data, as well as by the limited computational and energy resources of their on-board systems. Currently, neuromorphic engineering is a rapidly growing field that aims to design information processing systems similar to the human brain by leveraging novel algorithms based on spiking neural networks (SNNs). These systems are well-suited to recognize temporal patterns in data while maintaining a low energy consumption and offering highly parallel architectures for fast computation. However, the lack of effective algorithms for SNNs impedes their wide usage in mobile robot applications. This paper addresses the problem of radar signal processing by introducing a novel SNN that substitutes the discrete Fourier transform and constant false-alarm rate algorithm for raw radar data, where the weights and architecture of the SNN are derived from the original algorithms. We demonstrate that our proposed SNN can achieve competitive results compared to that of the original algorithms in simulated driving scenarios while retaining its spike-based nature.
1. Introduction
Autonomous driving is a billion-dollar business with high demand for efficient computing systems. This introduces a limitation for highly automated vehicles, where the systems that process sensor data can drain more than 10% of the power stored for driving (Lin et al., 2018). Radar sensors are a fundamental component of most autonomous vehicles. Their low price and robustness against bad weather and lighting conditions make them great companions for lidar and vision cameras (Hasch et al., 2012; Winner et al., 2014; Patole et al., 2017). Whereas, the algorithms in this field are typically implemented on graphical processing units (GPUs), field-programmable gate arrays (FPGAs), or application-specific integrated circuits (ASICs) (Lin et al., 2018), neuromorphic hardware (NHW) offers an efficient alternative environment (Furber et al., 2014; Davies et al., 2018; Sangwan and Hersam, 2020). It provides a low-energy-footprint platform for a new generation of neural networks called spiking neural networks (SNNs), which reduce the high energy consumption of the popular artificial neural networks (ANNs) (Maass and Schmitt, 1999; Bouvier et al., 2019; Strubell et al., 2019).
SNN-based applications for sensor signal processing comprise a novel area within autonomous driving and have been applied to traditional vision cameras for tracking applications (Cao et al., 2015; Piekniewski et al., 2016); raw temporal pulses of lidar sensors for object detection (Wang et al., 2021); dynamic vision sensors for tasks including lane keeping (Bing et al., 2020), feature extraction and motion perception (Paredes-Vallés et al., 2019), and collision avoidance (Salvatore et al., 2020); as well as remote sensing images for object detection (Liu et al., 2018). Likewise, bio-inspired neural networks have also been applied to control problems in mobile applications, including rotation control for unmanned aerial vehicles (Stagsted et al., 2020); and tracking control (Khan et al., 2021) and obstacle avoidance (Khan et al., 2020) for smart-home manipulators.
Current trends in signal processing include optimization of the energy consumption, memory resources, and computational speed of the Fourier transform (FT) (Gilbert et al., 2014). In the case of radar processing, the FT converts the raw data from the sensor into a range-Doppler map, followed by an object-detection algorithm that separates the target values from noise (Patole et al., 2017). Later stages extract high-level information, such as a list of labeled objects or target trajectories. A few recent works have explored the application of SNNs to decomposing a time signal into a frequency spectrum, e.g., by applying sequential spiking band-pass filters to audio signals (Jiménez-Fernández et al., 2016) or using neurons that spike at specific input frequencies (Auge and Mueller, 2020). The former offers an efficient bio-inspired solution, but its applications are limited to extracting a small set of frequency components. The latter provides a simple and elegant solution, but fails to provide an accurate measurement of the frequency-components angles, which are crucial for computing a 2D FT.
In this letter, we present a novel SNN that is able to effectively replace the discrete FT (DFT) and constant false-alarm rate (CFAR) algorithms (Rohling, 1983). Its weights are fixed, as they are mathematically derived from the equations defining the two algorithms, leading to equivalent results in simulated driving scenarios. Therefore, the network does not require learning to adapt its weights. Modern radar applications use the fast FT (FFT), which consists of a recursive decomposition of the problem into smaller DFTs over subsets of the original data (Frigo and Johnson, 2005), i.e., the DFT is a generalization of the FFT. The proposed network is a theoretical approximation of the DFT, and further work can explore network topologies with smaller layers that mimic the desired FFT structure. The quantitative results show high similarity between the outputs of the proposed SNN and the original algorithms for both one and two dimensions. In combination with NHW, this work could provide an efficient alternative for processing radar data while maintaining analogous performance. Designing SNNs that can process sensor data is a crucial step for obtaining full neuromorphic sensor processing pipelines and, together with NHW, bring a new generation of signal-processing solutions with higher energy efficiencies and shorter latency response-times. Furthermore, finding SNN equivalents for all radar-processing stages is paramount, as hybrid pipelines introduce additional complexity through communication and spike conversion when data flows between the NHW and traditional hardware.
2. Spiking Neural Network
In this section, we explain an SNN that substitutes the 2D DFT (S-DFT) and object detection (S-OSCFAR) on raw frequency-modulated continuous-wave (FMCW) radar data. To do so, the network is split into two smaller networks that process each of the steps (see Figure 1).

Figure 1. Diagram of the implemented pipeline. The first block implements a spiking DFT on raw discretized FMCW radar data, and the second block implements the spiking OS-CFAR.
2.1. Fourier Transform
The 2D DFT is a linear transformation that can be represented by two successive matrix multiplications. Hence, each of the dimensions of the 2D DFT can be represented by a one-layer neural network with a linear activation function.
We have implemented the S-DFT with a two-layer network, where the first layer provides information about the target ranges and the second extracts their velocities. The input data has dimension N × M, where N is the total number of samples per chirp, and M is the number of chirps in a radar frame. Owing to the complex nature of the DFT, both the real and imaginary values must be computed. Therefore, each layer contains 2N × M neurons (Figure 2).
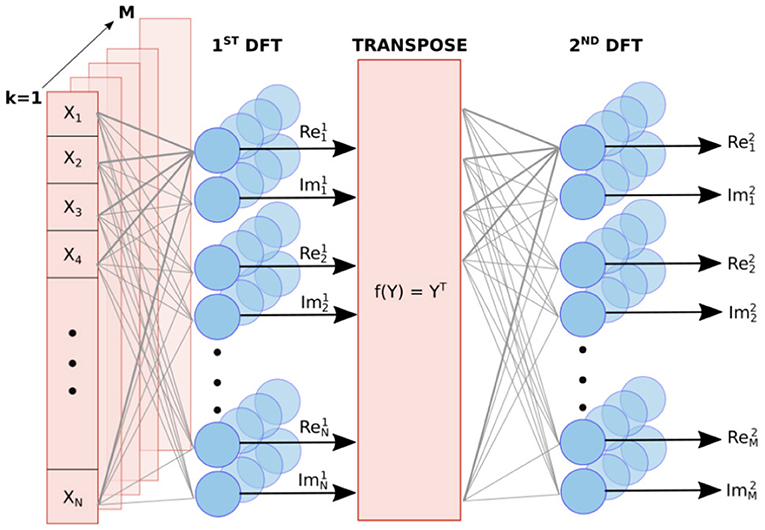
Figure 2. Diagram of the S-DFT. The first layer implements one DFT per chirp to obtain the range-dependent frequency bins, and the second layer performs a DFT along the different chirps to obtain the Doppler frequency components. A transpose operation is implemented between these steps, as each layer is applied along a different dimension.
The weights of the network have been calculated based on the trigonometric equation of the DFT:
Both the input vector X and output vector Y are formed by L values; hence, k and l take values between 0 and L − 1. L takes the value of N for the first layer and M for the second. We rewrite Equation (1) as
where Y is the result of the transform, X is the input vector, and WRe and WIm are the real and imaginary coefficients, respectively. From Equation (1), the individual weight coefficients can be calculated using the following equations:
The first layer is replicated in parallel M times using the same weights. The output consists of the frequency spectrum of the input chirps, formed each by 2N values.
The second layer applies the same algorithm to the output of the first layer, Y(1). The main difference is that the input in this case is formed by complex values, so the real and imaginary parts obtained from Equation (2) for the first layer are fed into the equation for the second layer. Therefore, Equation (2) can be generalized for the second layer by using the following algebraic system:
For this layer, WRe and WIm are M × M matrices.
With appropriate weights, a two-layer feed-forward network with linear activation can represent Equations (2) and (5). A rate-based SNN can approximate a neural network based on rectified linear unit (ReLU) functions (Rueckauer et al., 2017). For one layer, such a network transforms its input a ∈ ℝn as
where W ∈ ℝm×n is the weight matrix and z ∈ ℝm is the result. In the rate-based approximation, the input is represented by n neurons whose spike frequencies are proportional to the components of a. Assuming that we simulate the SNN for k timesteps, we denote the spike train of the input neuron i as a binary vector Θ(i) ∈ {0, 1}k, where 1 in indicates a spike and Θ(i) is computed from ai. Rueckauer et al. (2017) showed that z can be approximated by the spike frequency of m output neurons. The membrane potential Vj fully describes the state of the output neuron j. At a certain timestep 1 < t < k, it is computed according to
where Vthr is a model parameter. We compute the output spike train with a threshold behavior. Whenever , the output neuron j spikes and is reduced by Vthr. The spike train defines the spike frequency, and we obtain an approximation to yj. For deeper networks, the neuron model governs all hidden layers as well as the output layer (Rueckauer et al., 2017).
Latest conversion approaches are based on ReLU networks. However, a single ReLU function does not span over the entire real spectrum, so the S-DFT implements the activation by combining two ReLU functions with opposite signs in their weights. To still use the existing conversion theory, we rewrite a regular matrix multiplication as a sum of two ReLU layers
which leads to two convertible sub-networks with weights of opposite signs. This logic is applied to Equations (1) and (5) in order to obtain a convertible network and ultimately an SNN for the DFT.
2.2. OS-CFAR
CFAR algorithms differentiate signals from noise. In the context of radar processing, the ordered-statistics (OS) CFAR is a very prominent candidate to detect targets in range-Doppler maps (Rohling, 1983).
It operates on a 1D array x containing N + G + 1 values, where N is the number of neighbor cells, G is the number of guarding cells, and the remaining value is the one to be classified (see Figure 3). Let us denote the latter as xc and the set of all neighbor cells as . The OS-CFAR algorithm compares the kth largest value of against αxc, where 0 < α < 1 is a scale factor. If αxc is larger, it is classified as a signal; otherwise, it is considered noise. This can be expressed as
where maxk selects the kth largest element and [.] denotes the Iverson bracket1.
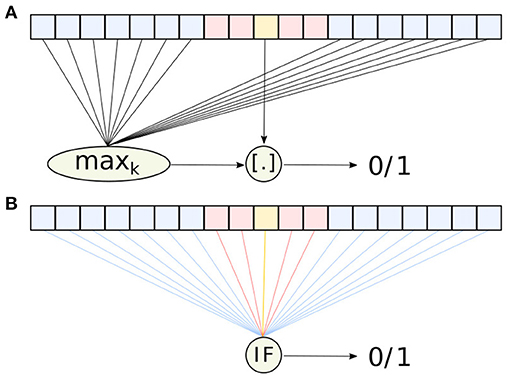
Figure 3. Diagrams representing the functionality of (A) the traditional OS-CFAR algorithm, and (B) the spiking OS-CFAR algorithm described in section 2.2. The diagrams show the N neighbor cells, G guarding cells, and the value under consideration xc in blue, red, and yellow, respectively. The different connection colors indicate the weights: −1 (blue), 0 (red), and 1 + (k − 1) (yellow).
The OS-CFAR algorithm can be replaced by an SNN consisting of a single integrate-and-fire (IF) neuron, see Equation (7). We refer the reader to chapter 1.3 of Gerstner et al. (2014) for more details about the neuron model. If the IF neuron receives a spike from a pre-synaptic neuron connected with weight w, the membrane potential v instantaneously increases to the new value, v + w. The information of the real-valued vector x ∈ ℝq is encoded in the precise spike time of a set of q pre-synaptic neurons. For a given value xi, the associated pre-synaptic neuron i spikes at
where xmin < xi < xmax ∀i, and tmin and tmax define the earliest and latest spike time, respectively. Equation (10) is a linear transformation that maps larger values to earlier spike times.
The defined encoding allows us to rewrite the CFAR problem. Instead of finding the kth largest value and comparing it against αxc, we evaluate whether fewer than k spikes arrive before t(αxc). Therefore, we need to choose the parameters of the IF neuron appropriately. Among many different choices, we propose defining the initial membrane potential, firing threshold, neighbor weights, guarding weights, and weight for the value under consideration as v0 = 0, vth = 1, , , and wc = 1 + (k − 1), respectively. With these parameters, the neuron spikes if and only if fewer than k spikes arrived before t(αxc). The neuron spikes in the same manner in which the OS-CFAR computes 0 or 1; thus, in that sense, both methods are mathematically equivalent. To guarantee that the classic algorithm and its spiking counterpart detect the same peaks, the time step Δt must comply with Δt < |tk−1 − t(αxc)|; i.e., the (k − 1)th spike must arrive at least one time step before the reference spike.
The method can be generalized to the 2D case by defining the neighbor and guarding cells on a 2D array, as done for the traditional OS-CFAR algorithm. The interested reader may find more information in Kronauge and Rohling (2013). Although the weights and spike times remain unchanged, the algorithmic parameters k and α need to be adapted to the new problem to obtain meaningful results (Rohling, 1983).
3. Experiment Results
The data used in the experiments has been gathered using an automotive radar simulator. This tool simulates a 77 GHz radar with a user-specified number of targets in the sensed scene. The generated data also includes several sources of noise typically present in real radar data, e.g., analog front-end noise, ADC noise and saturation, phase noise, and thermal noise. The generated data frames are formed by 128 chirps and 1,024 samples per chirp. The bandwidth and duration of each chirp are 275 MHz, and 54 μs, respectively.
The simulated sensor is a long-distance radar (range up to 300 m), and the scene is populated with three targets at ranges R = {5, 9, 100} m. The velocities of the targets relative to the radar are V = {0, 2, 14} m/s, and the radar cross section (RCS) σ = {0, 5, 40} dBsm. The first two objects represent two pedestrians, whereas the last target represents a vehicle. These values are based on the typical velocities of such targets, and the RCS values are obtained from previous studies (Kamel et al., 2017; Deep et al., 2020). The simulation also includes 20-mm sensor packaging and the 1-cm car bumper, with RCS σP = −40 dBsm, and σB = −23 dBsm, respectively.
The proposed algorithm was implemented in Python, and the code is open-source2.
3.1. One-Dimensional DFT and CFAR
In the first experiment, we applied the S-DFT and S-OSCFAR to a single chirp of the simulated scene. The 1D S-DFT was simulated with 1,000 time steps of size Δt = 0.01ms, i.e., for a total time of 10ms. The input values are converted to spike trains with regular spike time intervals ΔT ∈ [0.2, 10.0]ms. To encode the S-OSCFAR values, we set the parameters tmin and tmax to 0 and 50ms, respectively. This sub-network was also simulated with a temporal resolution Δt = 0.01ms. Both the classical and spiking CFAR algorithms used G = 12 guarding cells, N = 30 neighbor cells, a scale factor α = 0.2, and compared against the kth = 6th largest value.
Figure 4A shows the results of the original algorithms, and Figure 4B shows the results of the proposed algorithm for a single dimension, i.e., range. The performance of both the standard and spiking versions are comparable, and they were able to detect the three objects present in the scene.
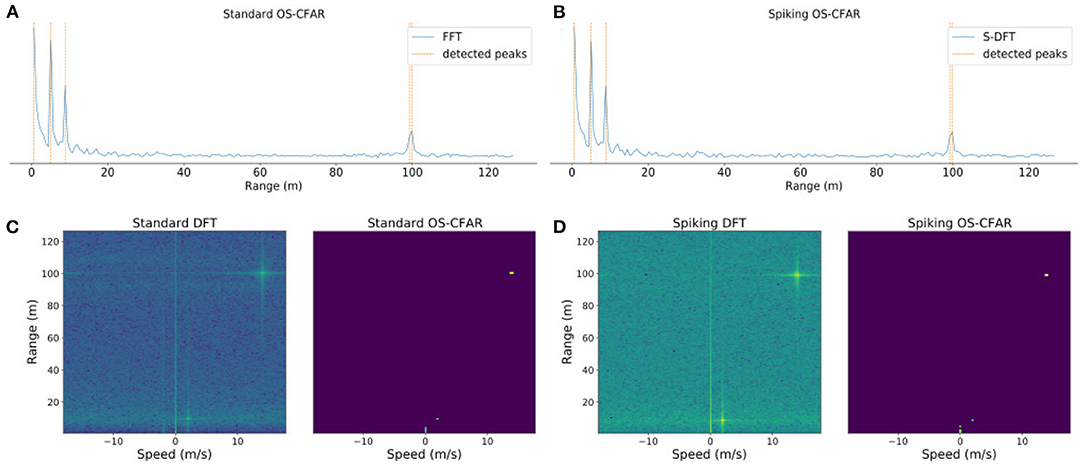
Figure 4. Results of the experiments on a simulation with three targets and a car bumper next to the sensor for (A) the 1D standard DFT and OS-CFAR algorithms, (B) the 1D S-DFT and S-OSCFAR, (C) the 2D standard DFT and OS-CFAR algorithms, and (D) the 2D S-DFT and S-OSCFAR. The sensor range is up to 300 m, but for visualization purposes the range dimension has been cropped until 125 m.
For evaluating the performance of the S-DFT, we measured the root mean square error (RMSE) between the DFT and S-DFT, which yielded RMSE = 0.0056. This measure was taken after normalizing the output values between 0 and 1. This small error is generated during the encoding process, as the S-DFT is a mathematical approximation of the original DFT.
3.2. Two-Dimensional DFT and CFAR
In the second experiment, we applied the S-DFT and S-OSCFAR to the complete radar frame of the simulated scene. The 2D S-DFT simulation parameters were identical to the 1D case, except for the total simulation time, which was increased to 50ms. Furthermore, the encoding parameters for the S-OSCFAR algorithm and the temporal resolution were identical to the 1D experiment. The CFAR parameters were set to G = 48 guarding cells, N = 176 neighbor cells, a scale factor α = 0.2, and compared against the kth = 9th largest value.
Figure 4C shows the results for the standard DFT and OS-CFAR, and Figure 4D shows the results for the spiking versions. As in the 1D experiment, the traditional and the spiking approaches were able to detect the three targets.
The error between the traditional algorithm and the S-DFT resulted in an RMSE of 0.0060, which is slightly larger than in the 1D case. As the number of layers in the network increases, encoding errors accumulate and the results increasingly differ from the desired goal (Rueckauer et al., 2017). However, this error is small, and the S-DFT offers very similar output to that of the standard DFT. Moreover, the small deviations did not affect the overall detection performance.
4. Conclusion
In this work, we presented an SNN that approximates the first stages of a typical automotive radar pipeline i.e., the Fourier transform and object detection. In contrast to the majority of ANN and SNN applications, our network is mathematically derived from the original algorithms and is not based on learning, as the DFT and CFAR are efficient and fast methods that can be translated into a neural network. Thus, we avoid the difficulties of network verification arising from high-dimensional optimization algorithms.
The implementation of every step of the radar signal processing with SNNs is fundamental in order to unfold the full potential of SNNs and NHW. For instance, the input and output of the proposed method are binary temporal events. In the present work, this data structure is inferred with encoding and decoding techniques. However, they introduce additional overhead and consequently penalize the energy footprint of the method. Instead of generating spikes after the analog-to-digital converter, future work should focus on designing ad-hoc electronics for generating spike-trains directly from the voltage signal, taking inspiration from the most recent advances in neuromorphic sensors. Future work should also focus on encoding the information using temporal coding, due to the efficiency gains that it provides, as well as extending the SNN to higher-level processing stages e.g., classification, tracking, or semantic segmentation. Furthermore, it is necessary to implement the developed algorithms in NHW and conduct benchmarking experiments that compare them with traditional methods. An exhaustive assessment that evaluate performance parameters (e.g., latency, energy, and memory usage) is paramount in order to determine its real potential for automotive applications.
The application of SNNs has typically been limited to computer vision datasets or ad-hoc neuromorphic sensors, and, to our knowledge, this is the first implementation of an SNN to the processing pipeline of automotive radar. We anticipate a rise in the application of SNNs for radar processing in upcoming years, due to increasing interest in efficient processing chains for autonomous driving applications and the major role that radar sensors play in these systems.
Data Availability Statement
The data for conducting the experiments is available here: https://github.com/KI-ASIC-TUM/spiking-dft-cfar.
Author Contributions
JL-R designed and implemented the S-DFT. TD designed and implemented the S-OSCFAR. The manuscript was written by JL-R and TD, with support from ZB. AK supervised the project and provided the funding. All authors contributed to the article and approved the submitted version.
Funding
This research has been funded by the Federal Ministry of Education and Research of Germany in the framework of the KI-ASIC project (16ES0995).
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Acknowledgments
We would like to thank Infineon Technologies AG for providing the automotive radar simulator used for the experiments. We would also like to thank Nico Reeb, Bernhard Vogginger, Leon Bonde Larsen, Katrine Nielsen, and all the reviewers for their useful comments and suggestions.
Footnotes
1. ^The Iverson bracket [C] yields 1 if the condition C is true and 0 if false.
References
Auge, D., and Mueller, E. (2020). Resonate-and-Fire Neurons as Frequency Selective Input Encoders for Spiking Neural Networks. Technical Report TUM-I2083. Available online at: https://mediatum.ub.tum.de/1544346 (accessed March 25, 2021).
Bing, Z., Meschede, C., Chen, G., Knoll, A., and Huang, K. (2020). Indirect and direct training of spiking neural networks for end-to-end control of a lane-keeping vehicle. Neural Netw. 121, 21–36. doi: 10.1016/j.neunet.2019.05.019
Bouvier, M., Valentian, A., Mesquida, T., Rummens, F., Reyboz, M., Vianello, E., et al. (2019). Spiking neural networks hardware implementations and challenges: a survey. ACM J. Emerg. Technol. Comput. Syst. 15, 1–35. doi: 10.1145/3304103
Cao, Z., Cheng, L., Zhou, C., Gu, N., Wang, X., and Tan, M. (2015). Spiking neural network-based target tracking control for autonomous mobile robots. Neural Comput. Appl. 26, 1839–1847. doi: 10.1007/s00521-015-1848-5
Davies, M., Srinivasa, N., Lin, T.-H., Chinya, G., Cao, Y., Choday, S. H., et al. (2018). Loihi: A neuromorphic manycore processor with on-chip learning. IEEE Micro 38, 82–99. doi: 10.1109/MM.2018.112130359
Deep, Y., Held, P., Ram, S. S., Steinhauser, D., Gupta, A., Gruson, F., et al. (2020). Radar cross-sections of pedestrians at automotive radar frequencies using ray tracing and point scatterer modelling. IET Radar Sonar Navig. 14, 833–844. doi: 10.1049/iet-rsn.2019.0471
Frigo, M., and Johnson, S. G. (2005). The design and implementation of fftw3. Proc. IEEE 93, 216–231. doi: 10.1109/JPROC.2004.840301
Furber, S. B., Galluppi, F., Temple, S., and Plana, L. A. (2014). The spinnaker project. Proc. IEEE 102, 652–665. doi: 10.1109/JPROC.2014.2304638
Gerstner, W., Kistler, W. M., Naud, R., and Paninski, L. (2014). Neuronal Dynamics - From Single Neurons to Networks and Models of Cognition. Cambridge: Cambridge University Press.
Gilbert, A. C., Indyk, P., Iwen, M., and Schmidt, L. (2014). Recent developments in the sparse fourier transform: a compressed fourier transform for big data. IEEE Signal Process. Mag. 31, 91–100. doi: 10.1109/MSP.2014.2329131
Hasch, J., Topak, E., Schnabel, R., Zwick, T., Weigel, R., and Waldschmidt, C. (2012). Millimeter-wave technology for automotive radar sensors in the 77 GHz frequency band. IEEE Trans. Microwave Theor. Tech. 60, 845–860. doi: 10.1109/TMTT.2011.2178427
Jiménez-Fernández, A., Cerezuela-Escudero, E., Miró-Amarante, L., Dominguez-Morales, M. J., de Asis Gómez-Rodriguez, F., Linares-Barranco, A., et al. (2016). A binaural neuromorphic auditory sensor for FPGA: a spike signal processing approach. IEEE Trans. Neural Netw. Learn. Syst. 28, 804–818. doi: 10.1109/TNNLS.2016.2583223
Kamel, E. B., Peden, A., and Pajusco, P. (2017). “RCS modeling and measurements for automotive radar applications in the W band,” in 2017 11th European Conference on Antennas and Propagation (EUCAP) (IEEE), 2445–2449. doi: 10.23919/EuCAP.2017.7928266
Khan, A. T., Li, S., and Cao, X. (2021). Control framework for cooperative robots in smart home using bio-inspired neural network. Measurement 167:108253. doi: 10.1016/j.measurement.2020.108253
Khan, A. T., Li, S., and Li, Z. (2020). Obstacle avoidance and model-free tracking control for home automation using bio-inspired approach. Adv. Control Appl. Eng. Indus. Syst. e63. doi: 10.1002/adc2.63
Kronauge, M., and Rohling, H. (2013). Fast two-dimensional CFAR procedure. IEEE Trans. Aerospace Electron. Syst. 49, 1817–1823. doi: 10.1109/TAES.2013.6558022
Lin, S.-C., Zhang, Y., Hsu, C.-H., Skach, M., Haque, M. E., Tang, L., et al. (2018). “The architectural implications of autonomous driving: constraints and acceleration,” in Proceedings of the Twenty-Third International Conference on Architectural Support for Programming Languages and Operating Systems, 751–766. doi: 10.1145/3173162.3173191
Liu, Y., Cai, K., Zhang, M.-H., and Zheng, F.-B. (2018). “Target detection in remote sensing image based on saliency computation of spiking neural network,” in IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium (Valencia: IEEE), 2865–2868. doi: 10.1109/IGARSS.2018.8518345
Maass, W., and Schmitt, M. (1999). On the complexity of learning for spiking neurons with temporal coding. Inform. Comput. 153, 26–46. doi: 10.1006/inco.1999.2806
Paredes-Vallés, F., Scheper, K. Y. W., and De Croon, G. C. H. E. (2019). Unsupervised learning of a hierarchical spiking neural network for optical flow estimation: from events to global motion perception. IEEE Trans. Pattern Anal. Mach. Intell. 42, 2051–2064. doi: 10.1109/TPAMI.2019.2903179
Patole, S. M., Torlak, M., Wang, D., and Ali, M. (2017). Automotive radars: a review of signal processing techniques. IEEE Signal Processing Mag. 34, 22–35. doi: 10.1109/MSP.2016.2628914
Piekniewski, F., Laurent, P., Petre, C., Richert, M., Fisher, D., and Hylton, T. (2016). Unsupervised learning from continuous video in a scalable predictive recurrent network. arXiv preprint arXiv:1607.06854.
Rohling, H. (1983). Radar CFAR thresholding in clutter and multiple target situations. IEEE Trans. Aerospace Electron. Syst. 19, 608–621. doi: 10.1109/TAES.1983.309350
Rueckauer, B., Lungu, I.-A., Hu, Y., Pfeiffer, M., and Liu, S.-C. (2017). Conversion of continuous-valued deep networks to efficient event-driven networks for image classification. Front. Neurosci. 11:682. doi: 10.3389/fnins.2017.00682
Salvatore, N., Mian, S., Abidi, C., and George, A. D. (2020). “A neuro-inspired approach to intelligent collision avoidance and navigation,” in 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC) (IEEE), 1–9. doi: 10.1109/DASC50938.2020.9256492
Sangwan, V. K., and Hersam, M. C. (2020). Neuromorphic nanoelectronic materials. Nat. Nanotechnol. 15, 517–528. doi: 10.1038/s41565-020-0647-z
Stagsted, R. K., Vitale, A., Renner, A., Larsen, L. B., Christensen, A. L., and Sandamirskaya, Y. (2020). “Event-based pid controller fully realized in neuromorphic hardware: a one dof study,” in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Las Vegas, NV: IEEE), 10939–10944. doi: 10.1109/IROS45743.2020.9340861
Strubell, E., Ganesh, A., and McCallum, A. (2019). Energy and policy considerations for deep learning in NLP. arXiv preprint arXiv:1906.02243. doi: 10.18653/v1/P19-1355
Wang, W., Zhou, S., Li, J., Li, X., Yuan, J., and Jin, Z. (2021). “Temporal pulses driven spiking neural network for time and power efficient object recognition in autonomous driving,” in 2020 25th International Conference on Pattern Recognition (ICPR) (Milano: IEEE), 6359–6366.
Keywords: spiking neural network, FMCW radar, Fourier tranform, constant false-alarm rate, autonomous driving
Citation: López-Randulfe J, Duswald T, Bing Z and Knoll A (2021) Spiking Neural Network for Fourier Transform and Object Detection for Automotive Radar. Front. Neurorobot. 15:688344. doi: 10.3389/fnbot.2021.688344
Received: 30 March 2021; Accepted: 06 May 2021;
Published: 07 June 2021.
Edited by:
Shuai Li, Swansea University, United KingdomReviewed by:
Dechao Chen, Hangzhou Dianzi University, ChinaAmeer Tamoor Khan, Hong Kong Polytechnic University, China
Copyright © 2021 López-Randulfe, Duswald, Bing and Knoll. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Javier López-Randulfe, bG9wZXoucmFuZHVsZmVAdHVtLmRl
†These authors have contributed equally to this work