 Jannis Jakobi1*
Jannis Jakobi1* Johan A. Huisman1
Johan A. Huisman1 Martin Schrön2
Martin Schrön2 Justus Fiedler1
Justus Fiedler1 Cosimo Brogi1
Cosimo Brogi1 Harry Vereecken1
Harry Vereecken1 Heye R. Bogena1
Heye R. Bogena1- 1Agrosphere Institute (IBG-3), Forschungszentrum Jülich GmbH, Jülich, Germany
- 2Department of Monitoring and Exploration Technologies, Helmholtz-Zentrum für Umweltforschung GmbH-UFZ, Leipzig, Germany
A Corrigendum on
Error Estimation for Soil Moisture Measurements With Cosmic Ray Neutron Sensing and Implications for Rover Surveys
by Jakobi, J., Huisman, J. A., Schrön, M., Fiedler, J., Brogi, C., Vereecken, H., et al. (2020). Front. Water 2:10. doi: 10.3389/frwa.2020.00010
In the original article, there was an error in the simplification of Equations (8) and (9) to Equation (10). A correction has been made to Equation (10):
In the original article, there were mistakes in Figures 5 and 8 as published. The analytical uncertainty estimates were derived wrongly. The corrected Figures 5 and 8 appear below.
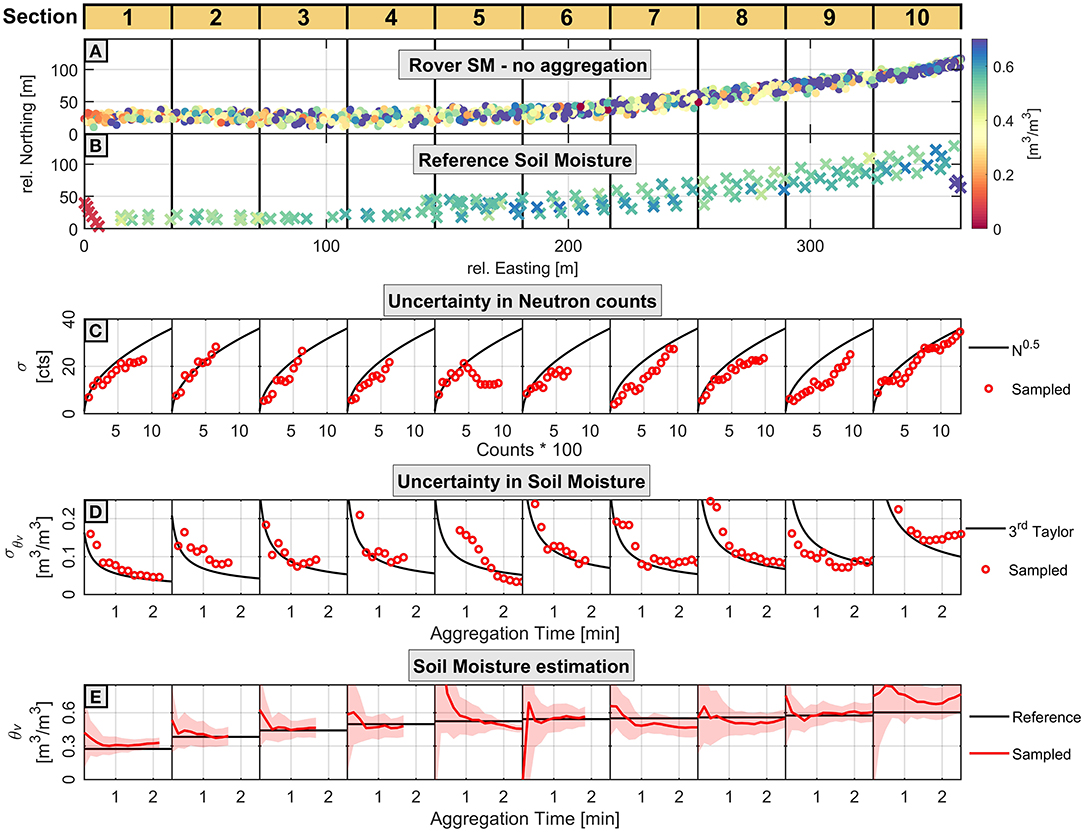
Figure 5. Overview of the results from the Fendt experiment for each of the ten analyzed sections. (A) CRN rover soil moisture without aggregation. (B) In-situ reference soil moisture. The relative coordinates in panels a and b were calculated from UTM coordinates. (C) Expected standard deviation of raw neutron counts (σ). (D) 3rd order approximation of standard deviation of soil moisture from raw neutron counts (σθv) in comparison to measured standard deviation with the CRN rover. (E) Soil moisture (θv) estimated with the CRN rover in comparison with mean reference soil moisture content for each section. Red area indicates ± one measured standard deviation of the mean.
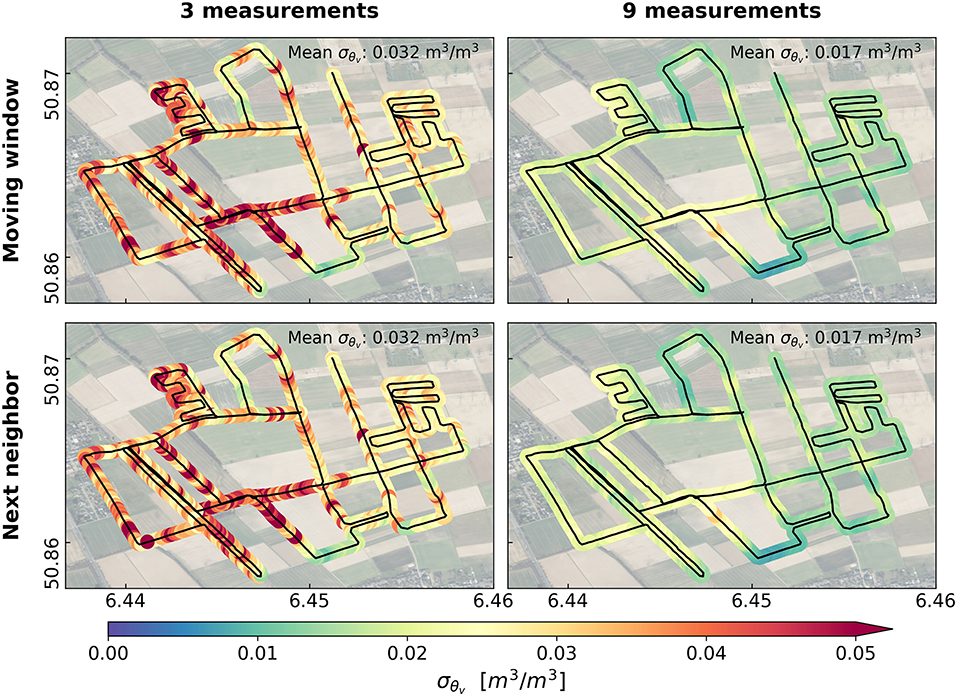
Figure 8. Comparison of soil moisture uncertainty from neutron counts (σθv) estimation with four aggregation strategies with the Jülich CRN rover at the Selhausen site with data measured on 11 July 2018. Top panels: moving window aggregation for three and nine following measurements, respectively. Bottom panels: nearest neighbor aggregation with the nearest two and eight neighbors, respectively. Base maps: ESRI World Imagery and Contributors.
The corrected Figure 5 requires update of the description in the text. A correction has been made to the Results and Discussion section, Experiment A (Fendt site), paragraph 2:
“[…] With the exception of sections 5, 9 and 10, all sections showed good agreement between the expected and measured uncertainty of soil moisture. […]”
The corrected Figure 8 requires update of the description in the text. A correction has been made to the Results and Discussion section, Experiment B (Selhausen site), paragraph 5:
“[…] However, the expected soil moisture estimation uncertainty using Selhausen site conditions (Figure 8) were similar to the overall uncertainty as expressed by the RMSE when only 3 measurements were used (0.032 m3/m3). This is undesirable and suggests the need for more aggregation. When nine measurements were aggregated, the average uncertainty due to uncertain neutron measurements decreased to 0.017 m3/m3 irrespective of aggregation strategy. […]”
The authors apologize for these errors and state that this does not change the scientific conclusions of the article in any way. The original article has been updated.
Keywords: cosmic ray neutron sensing, error propagation, aggregation, cosmic ray rover, uncertainty
Citation: Jakobi J, Huisman JA, Schrön M, Fiedler J, Brogi C, Vereecken H and Bogena HR (2020) Corrigendum: Error Estimation for Soil Moisture Measurements With Cosmic Ray Neutron Sensing and Implications for Rover Surveys. Front. Water 2:604482. doi: 10.3389/frwa.2020.604482
Received: 09 September 2020; Accepted: 22 October 2020;
Published: 26 November 2020.
Edited by:
Jianzhi Dong, United States Department of Agriculture, United StatesReviewed by:
Trenton Franz, University of Nebraska-Lincoln, United StatesCopyright © 2020 Jakobi, Huisman, Schrön, Fiedler, Brogi, Vereecken and Bogena. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Jannis Jakobi, ai5qYWtvYmlAZnotanVlbGljaC5kZQ==