 Robert Alms1*†
Robert Alms1*† Peter Wagner1,2†
Peter Wagner1,2†- 1Institute of Transportation Systems, German Aerospace Center (DLR), Berlin, Germany
- 2Institute of Land and Sea Transport Systems, TU Berlin, Berlin, Germany
With the increasing integration of conditionally automated Level 3 systems into real-world traffic, concerns about their impact on traffic efficiency and capacity have emerged. When such systems reach their operational limits, mandatory control transitions could disrupt traffic flow and reduce overall capacity. This study employs large-scale simulations and numerical experiments to analyze these effects and quantify potential capacity constraints. The results of the two-lane highway scenario show an experimental capacity reduction of up to
1 Introduction
As manufacturers begin to introduce Level 3 automated driving systems to the market, the potential impact of such systems on overall traffic flow and capacity needs to be investigated. A key challenge arises from the fact that Level 3 systems require human drivers to take over control when reaching system limits, leading to so-called transitions of control (ToC), which may disrupt traffic flow and reduce road capacity. Despite regulatory advancements concerning Level 3 systems (R157 by UNECE (2023)), the macroscopic impact of such procedural ToC effects on traffic conditions remains insufficiently explored. This raises the general question of how Level 3 control transitions in conditionally automated vehicles (AVs) affect traffic capacity and, more specifically, what characteristics of procedural ToC-induced time headway increments in vehicle strings contribute to this effect. To investigate this, we conduct a large-scale simulation-based analysis and complement it with simplified numerical experiments to estimate macroscopic capacity impacts. Our study also explores the underlying mechanisms of the transition phase in greater detail. Existing research on potential capacity gains from AVs, as exemplified by Friedrich (2016) and Park et al. (2021), has primarily focused on higher automation levels (4–5) under optimistic assumptions of short time headways, e.g.,
The rest of the paper is organized as follows: Section 2 introduces the conceptual aspects of ToCs in Level 3 automated systems. In Section 3, we present a highway scenario calibration based on real-world detector data. Section 4 details our methodology for investigating ToC-related capacity effects in a simulation study, while Section 5 presents and discusses our results, comparing simulated and estimated capacity reductions. Lastly, Section 6 offers our perspective on the interpretation and limitations of this study.
2 Transitions of control in level 3 automated driving
The six levels of driving automation, defined by SAE International (2021), not only classify automated driving functions and capabilities but also specify the human driver’s role in terms of engagement and responsibility, as illustrated in Figure 1. Conditional automated driving (Level 3, highlighted with a purple frame in Figure 1) represents a fundamental shift toward automated vehicle operation within defined Operational Design Domains (ODD), specified in British Standards Institution (2020), allowing human drivers to disengage from the primary driving task. However, if the Level 3 system requires the driver to resume control, a takeover request (ToR) is issued, initiating a critical transfer of authority: these procedures are referred to as transitions of control (ToC, plural: ToCs). Detailed insights into various aspects of ToCs are available through a comprehensive literature review on takeovers in automated driving (McDonald et al., 2019). Further studies examine the intricacies of modeling human factors, such as situational awareness and task demand (Van Lint and Calvert, 2018; Calvert and van Arem, 2020), or reduced driver performance (Wang et al., 2025b), during ToCs.
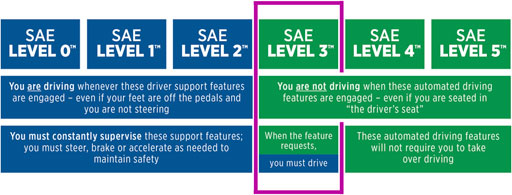
Figure 1. Excerpt from Shuttleworth (2019)’s illustration of the SAE Levels of Driving Automation (SAE International, 2021), with Level 3 highlighted by a purple frame.
The current regulations R157 from UNECE (2023) specify technical requirements for the certification of Level 3 Automated Lane Keeping Systems (ALKS) and set the time range
Figure 2 illustrates the basic mechanisms of the ToC model for successful and failed control transitions implemented in the microscopic traffic simulation SUMO (Alvarez Lopez et al., 2018). After a ToR, the AV enters a preparatory phase characterized by headway enlargement and disabled lane changing. Automated driving continues for the limited lead time, after which either the driver resumes control in time (successful transition), or, if not, the AV initiates an MRM (failed transition). For failed transitions, the AV initiates a phase of constant deceleration and may come to a full stop if the human driver does not respond. Although such events are rare, they can have a high impact and are the subject of extensive safety investigations based on disengagement reports (e.g., (Ward, 2024; Kohanpour et al., 2025)). However, this aspect is not the focus of the present work. In the case of a successful transition, the driver state model accounts for a phase of reduced human driving performance, with recent studies gaining further insights into both post-ToC durations (Wang et al., 2025a) and potential negative impacts on traffic stability (Wang et al., 2024).
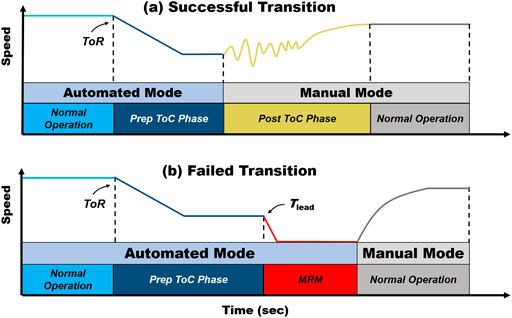
Figure 2. ToC model operation modes illustrated in a representative speed-time diagram for: (a) successful transition and (b) failed transition.
In Maerivoet et al. (2019) and Lücken et al. (2019) principal transition phase effects of consecutive, quasi-synchronous ToCs in a platoon of Level 3 automated vehicles were previously demonstrated. Figure 3a, which depicts speed and time headways for a string of five AVs disengaging at the same location, illustrates this effect in a simplified simulation experiment with identical vehicle parametrization. The increased time headways, and consequently the cumulative speed reduction, are caused by the preparatory headway increment of the vehicle automation to facilitate a safe takeover (cf. Figure 2, Prep ToC Phase). Figure 3b extends this analysis by showing acceleration profiles for a larger platoon of up to 32 vehicles—the maximum size at which the last AV still manages to prevent a complete stop—using SUMO’s ACC model for AVs, based on Xiao et al. (2017). The main observed effects in the vehicle decelerations include:
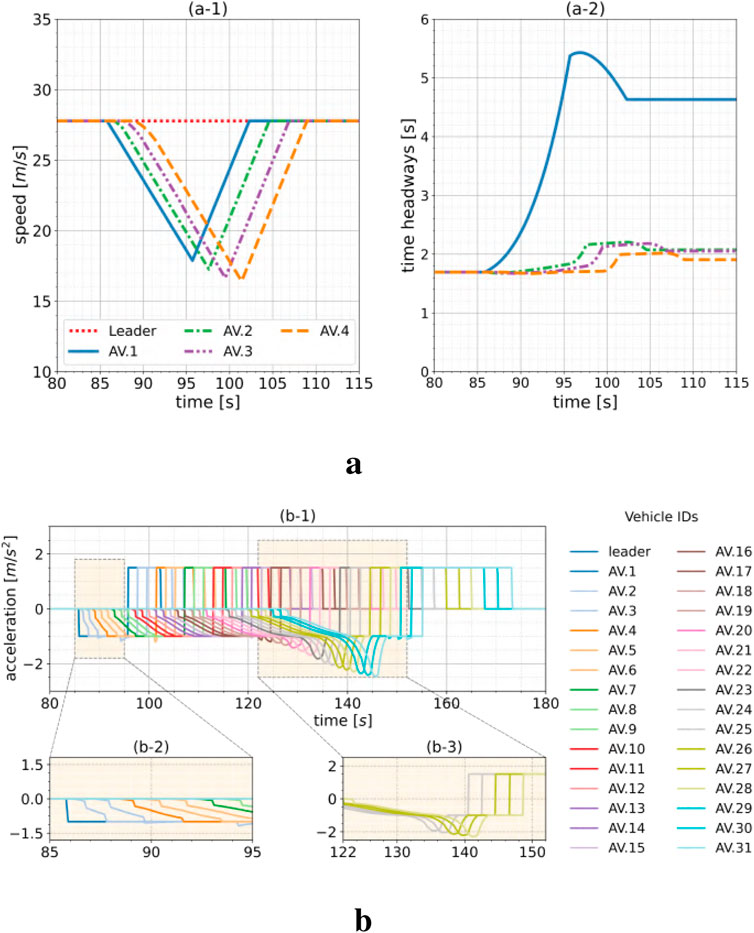
Figure 3. Platoon simulations with consecutive ToCs performed at a fixed location. (a) shows speed and time headway profiles for a short platoon with five AVs, illustrating the headway increment effect. (b) depicts acceleration profiles for a platoon of 32 AVs, showing an escalating headway increment effect with SUMO’s ACC model.
These numerical experiments are highly simplified due to identical vehicle parametrizations, yet they effectively illustrate the isolated ToC effects discussed. Given the cumulative deceleration patterns observed, we expect that ToC-induced disturbances may lead to noticeable reductions in traffic capacity. To examine whether these effects also manifest under more realistic traffic flow conditions, we calibrate a SUMO simulation scenario to detector data in Section 3.
3 Calibrating SUMO for a highway traffic scenario
To analyze the impact of ToCs on traffic capacity, we use real-world detector data from a German highway west of Berlin as a reference for SUMO calibration. The following sections detail the dataset and simulation setup.
3.1 AVUS detector data
Figure 4a shows a section of the Bundesautobahn A115, referred to as AVUS, which was occasionally used as a motor racing track in the past and is a highly frequented highway with up to 80.000 vehicles per day. We hypothesize a potential ODD zone for Level 3 automated driving in the inbound segment of the road (cf. Figure 4a, panel (a)), which is a two-lane highway with speed limits of
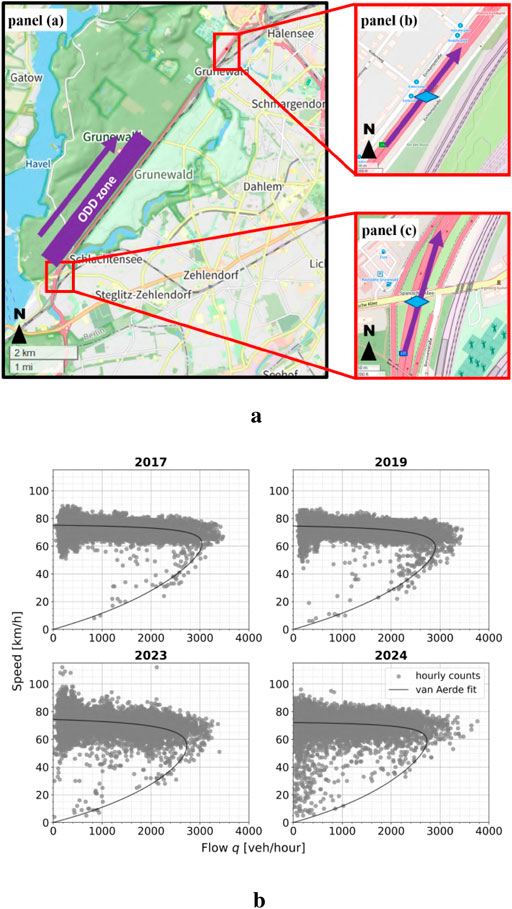
Figure 4. Overview of the AVUS scenario. (a) OpenStreetMap view of the AVUS highway with a potential 5 km ODD zone on the two-lane inbound edge highlighted in purple. Zoom displays show traffic detector locations, marked with blue in subpanels (b) and (c). Purple arrows indicate the inbound traffic direction. (b) Speed–flow scatterplots of yearly AVUS detector data for inbound traffic from detector “TE002”.
Figure 4b displays speed—flow relations for several years of the AVUS between 2015 and 2022, as scatterplots based on data from Digitale Plattform Stadtverkehr Berlin (2024). These data are originally tagged as hourly flows with corresponding average speeds per hour, but we suspect that this is not accurate. While the number of vehicles is accumulated over a full hour, the high variations in speeds at lower flow rates suggest that these data points from the detector database might actually represent speed averages over intervals of 1 minute or less. We were unable to verify this suspicion directly with the publisher of the data, but we argue that the actual speed value recorded in the database is likely the last entry of a full hour — possibly for efficiency and memory-saving reasons in data processing — rather than the average speed over the entire hour. This ultimately results in a notably wider distribution of speed values at lower flow rates than expected for true hourly data. For reference, we also added the model fit developed by Van Aerde (1995) to each plot.
Table 1 lists the yearly maximum flows

Table 1. Yearly flow metrics and HGV shares for AVUS inbound traffic.
3.2 Simulation setup for calibration
To investigate the impacts of ToCs in mixed-autonomy traffic, we compose a traffic mix of four different vehicle types: automated passenger vehicles (AVs), manual passenger vehicles (MVs), light goods vehicles (LGVs), and heavy goods vehicles (HGVs). The most relevant parameters for a heterogeneous traffic behavior in this AVUS highway scenario are visualized in Figure 5. Instead of utilizing SUMO’s default parameters, vehicle type specific distributions were deployed. Table 2 presents the full parametrization scheme for all vehicle types.
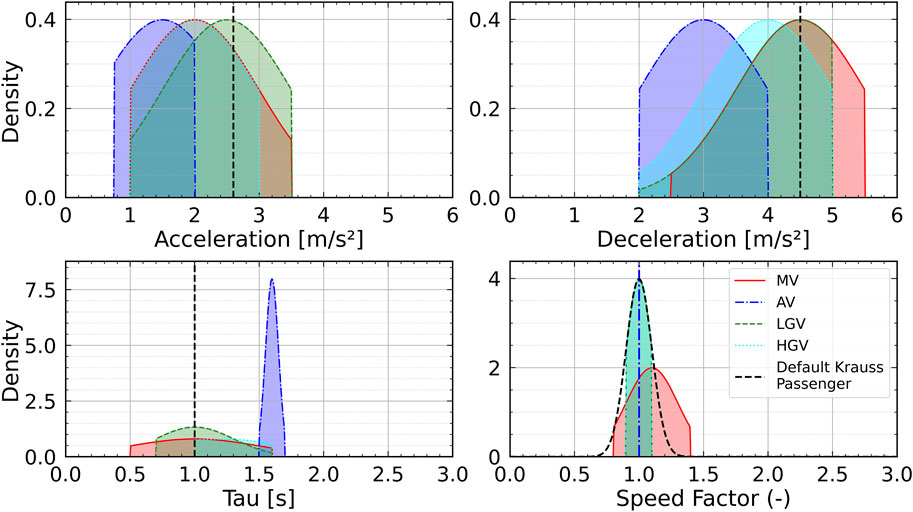
Figure 5. Distributions of the main parameters for different vehicle types. SUMO’s default is indicated by the black dashed line.
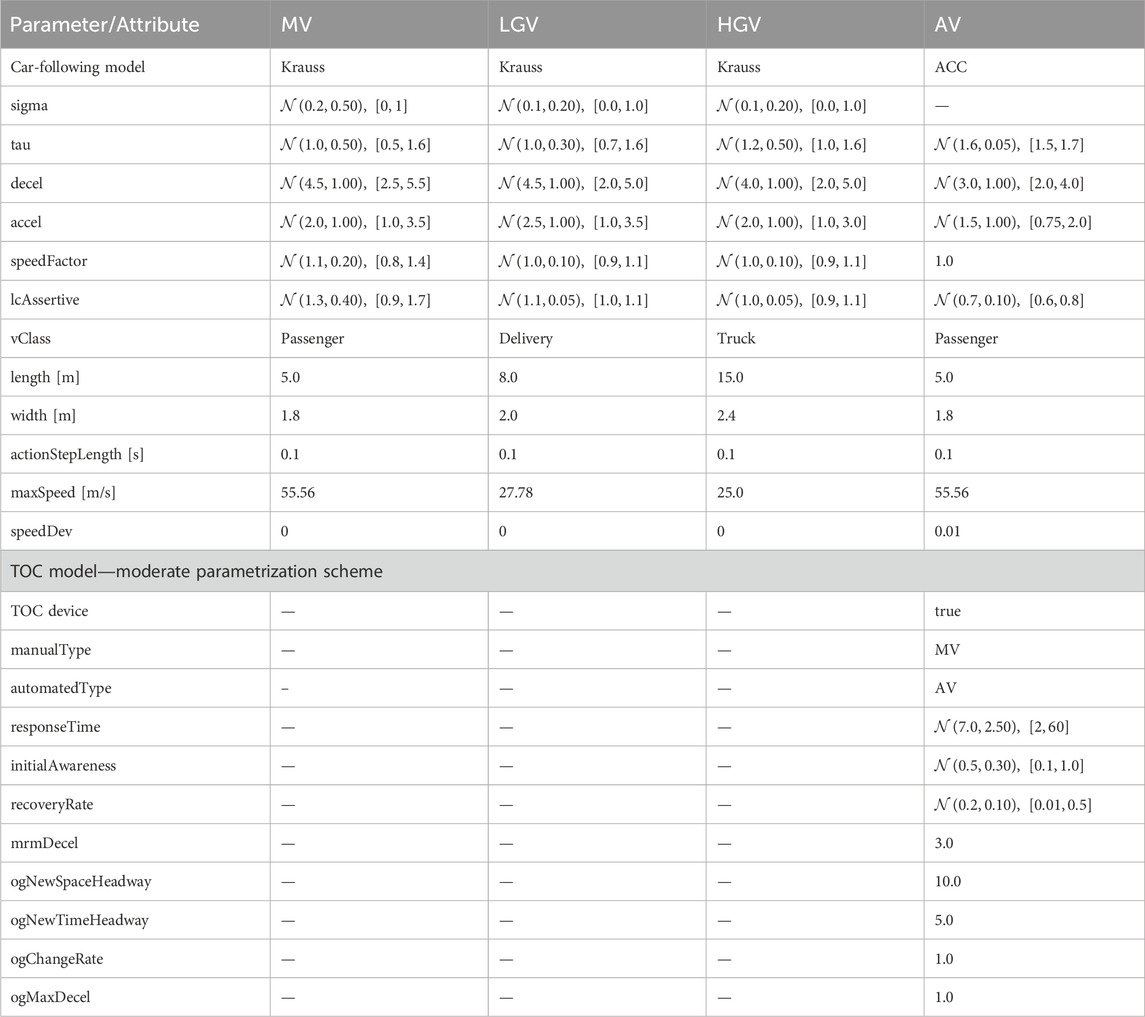
Table 2. Vehicle type definitions. “—” indicates not defined.
In principle, SUMO’s vehicle insertion capacity exceeds that of comparable real-world traffic scenarios. Therefore, we aim to calibrate the simulation primarily to match the maximum flow
3.3 Calibration including ramp flow
In the first step, we ran simulations with increasing demand using MVs only. To better capture the full spectrum of the fundamental diagram in SUMO, we introduced additional vehicle flow on the incoming ramp. This creates a merging scenario, leading to traffic breakdown upstream of the main edge’s detector position. Figure 6 shows the speed–flow relations as scatterplots for (i) real-world detector data from 2024, (ii) SUMO’s default parametrization, and (iii) the aggregated main edge data from the final calibration. The graphic also color-codes the demand intensities from the on-ramp and highlights the maximum
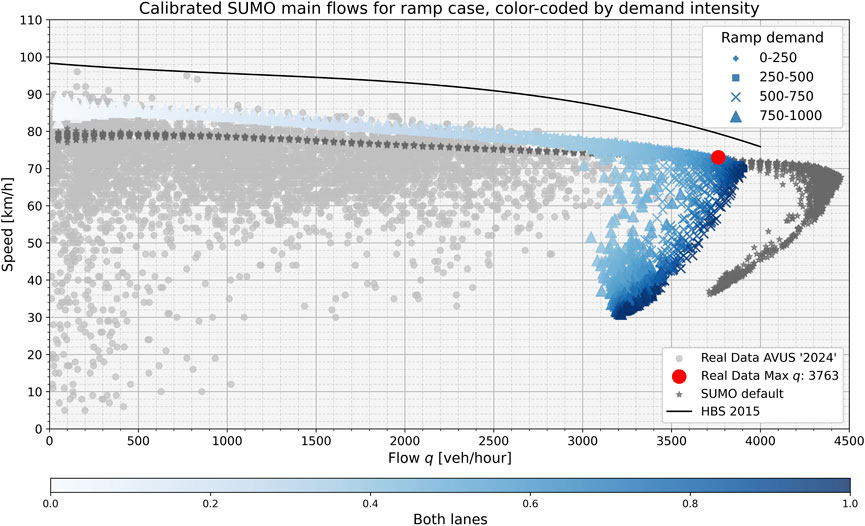
Figure 6. Speed–flow relations for the AVUS scenario, including ramp flow, comparing calibrated flows based on the parametrization scheme from Table 2 versus AVUS detector data from 2024, and SUMO’s default. The main edge’s demand intensities are color-coded in blue. Ramp demand levels are coded by marker size and style.
The key findings derived from Figure 6 are:
1. Comparing the dark gray SUMO default data with the light gray detector data, we identify how far SUMO’s default exceeds the actual maximum flow (about 700 vehicles surplus).
2. The calibrated main edge’s flow (blue-colored points) is notably lower than SUMO’s default. Maximum flows (dark blue points) are much closer to the real-data (about 130 vehicles difference) compared to SUMO’s default (dark gray).
3. The overall speed–flow relation of the calibrated main edge (blue) is slightly tilted toward higher speeds compared to SUMO’s default (dark gray), and the speed gradient more in line of the HBS expectation (black line).
4. The calibrated main edge’s traffic breakdown on the congested side of the fundamental diagram (indicated by darker-colored blue points) is much less pronounced than what is to be expected from real-world data (see light gray scatter points).
The phenomenon described in point 4 is, in part, a limitation of SUMO’s current modeling of cooperative lane-changing behavior between neighboring lanes under traffic breakdown conditions. Correspondingly, Figure 7 compares the lane-specific calibrated flows in SUMO with real AVUS data from 2024. We clearly identify the disparate speed levels between the lanes in SUMO (bottom panel), whereas the real-world data (top panel) indicate similar speed–flow relations on both lanes. Rummel (2017) indirectly revealed this issue in his investigation but was unable to unequivocally identify the lane-specific breakdowns as the underlying cause of SUMO’s oversaturation compared to the HBS predictions, nor did the report by Geistefeldt et al. (2017), which ultimately disregarded SUMO in its analysis for this very reason. While this limitation prevents a full replication of the real-world dynamics, we proceed with the calibration of the scenario as a basis for our analysis and will address this shortcoming in our future work.
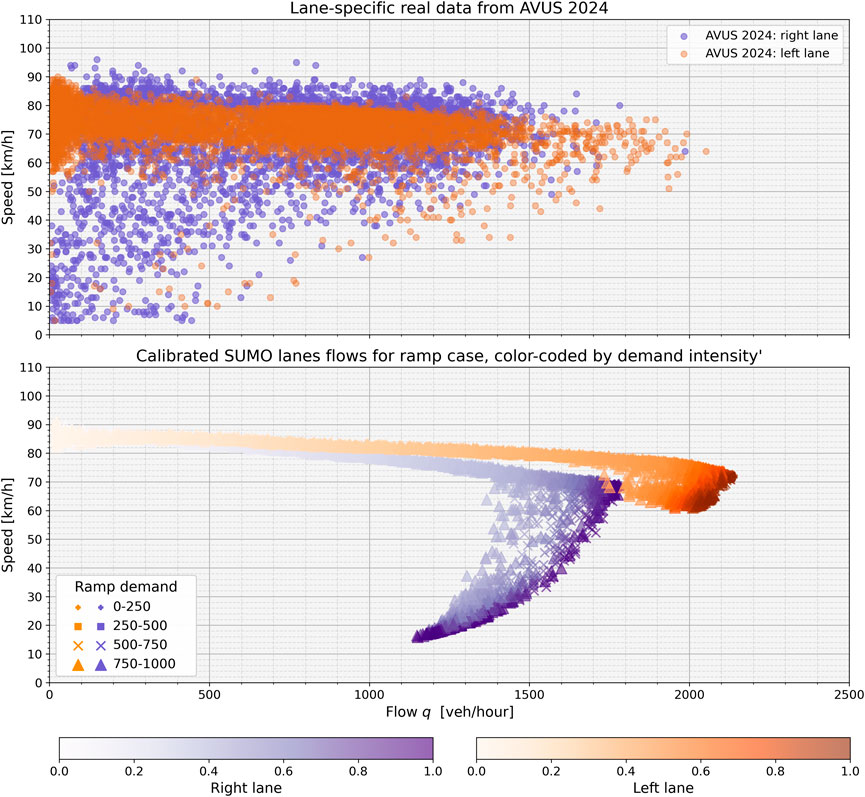
Figure 7. Lane-specific speed–flow relations for real data from 2024 (top panel) and SUMO’s calibrated ramp scenario (bottom panel).
3.4 Refining calibration by incorporating HGV share
In a second step, based on the parametrization scheme plausibilised for MVs in the ramp scenario (cf. Table 2), we conducted simulations with different shares of HGVs, LGVs, and MVs, but without any ramp flow. As a result, we can no longer reproduce the entire fundamental diagram for this highway scenario, since SUMO’s flow does not naturally lead to a traffic breakdown as observed in real-world highway traffic. The reason we need to disregard the unstable part of the fundamental diagram at this point is technical: SUMO does not maintain precise LGV/HGV shares for vehicle insertions when approaching maximum flow. Instead, the share of LGVs and HGVs declines to zero until SUMO can only insert MVs when the traffic breakdown at capacity is expected. This behavior stems partly from the parametrization of LGVs and HGVs, such as their larger vehicle lengths and time headways.
Figure 8 shows the speed–flow relations for the main edge with LGV/HGV shares of
1. The maximum flow with a
2. The AVUS detector data from 2018 have an HGV share of
3. The speed variations in all simulation results are relatively large. This is expected, as we deliberately plotted only the average speeds of the last 1-min interval of a full hour, which we suspect is also the case for the real detector data. This illustrates a plausible speed distribution from the calibrated simulations compared to the detector data.
4. The color-coded flows at capacity decrease notably with increasing HGV shares (decline by 260 to
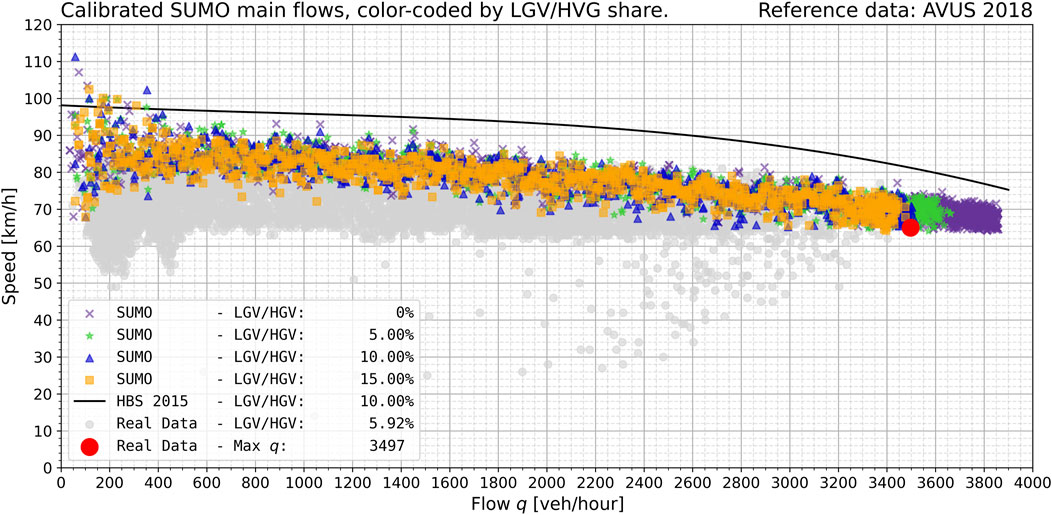
Figure 8. Speed–flow relations for the AVUS scenario based on the parametrization scheme from Table 2 comparing calibrated main flows considering LGV/HGV shares. Real-world detector data from AVUS 2018; color-coding by LGV/HGV share.
Considering the relatively low deterministic capacities based on the AVUS detector data stated in Table 1 compared to the expected capacities from the HBS (range from 3,600 to
Under the assumption that those percentages under HGV consideration scale down proportionally in SUMO with the capacity numbers stated above, we obtain the following deterministic capacity ranges for the calibrated parametrization scheme:
Even though these capacities are still about
4 Methodology to quantify capacity effects of ToCs
To determine ToC-related capacity impacts, we conduct a simulation study with an increasing AV penetration rate and measure the corresponding maximum flows
4.1 Simulation experiment
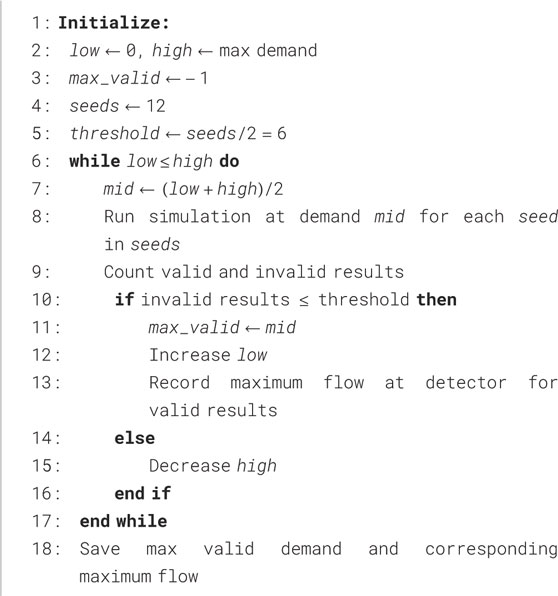
Algorithm 1.Binary search for maximum flow.
For the simulation study, we define a wide range of traffic shares based on the vehicle types outlined in Table 2. The traffic compositions feature increasing AV shares (AV00–AV85) in
1. No ToCs: Simulations without any ToCs.
2. Unmanaged: Simulations with unmanaged ToCs at the end of the ODD zone.
3. Managed: Simulations with ToCs managed by a ToC-dispatch algorithm over the full length of the ODD zone.
4. Unmanaged “rightmost95”: Simulations with unmanaged ToCs at the end of the ODD zone, emulating the concept of the latest approved manufacturer system by Mercedes-Benz Group (2024), operating up to
For cases 2–4, we additionally run simulations with
To measure the capacity per AV share as precisely as possible, we run the AVUS scenario with 12 seeds per traffic mix, deploying a binary search as illustrated in Algorithm 1. To ensure we obtain the correct maximum flow, the results of each run must be checked against the actual traffic share versus the expected share due to SUMO’s insertion mechanism, as described in Section 3.4. The binary search continues increasing the demand as long as valid traffic shares are observed, until the maximum flow per simulation run is reached.
Simulations run with a
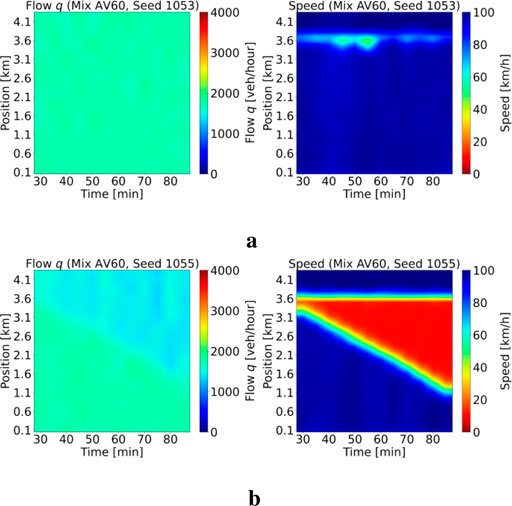
Figure 9. Spatiotemporal heatmaps of the ODD zone for speed and flow. (a) Valid run at max capacity: Mix AV60, seed 1053. (b) Invalid run: Mix AV60, seed 1055. The traffic breakdown is clearly visible in speed and flow.
4.2 Estimating capacity reduction
Considering the minGap in SUMO as
For the SUMO default minGap of
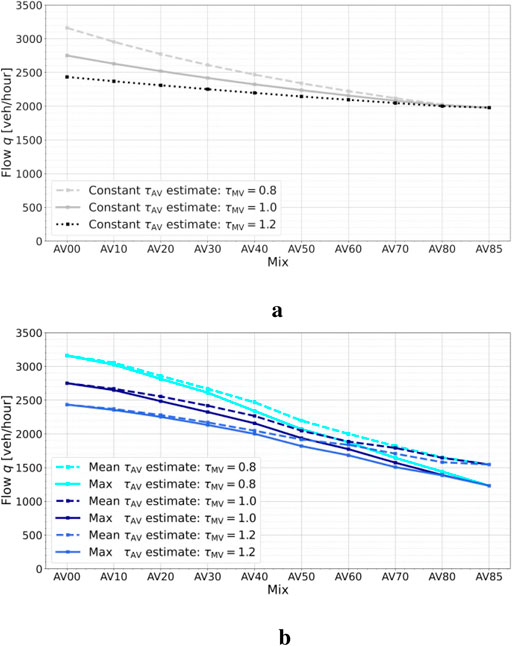
Figure 10. Estimated lane capacities based on Equation 1 for varied mean τ_MV-values. (a) shows capacity estimates assuming a constant τ_AV (no ToC consideration). (b) accounts for increasing τ_AV due to ToC effects (with ToC consideration).
To account for ToC effects in such estimations, we repeat the simplified numerical experiment with the 32-vehicle platoon described in Section 2, this time varying the AV–MV share in 10%-intervals between the two vehicle types. The top panel in Figure 11a shows the time headway profiles for a 100% AV share, corresponding to the acceleration profile discussed in Figure 3b. The increasing headways for later-following AVs are clearly identifiable. In the bottom panel (Figure 11b), which depicts a 50–50 share, the headway increase is far less pronounced compared to the top panel.
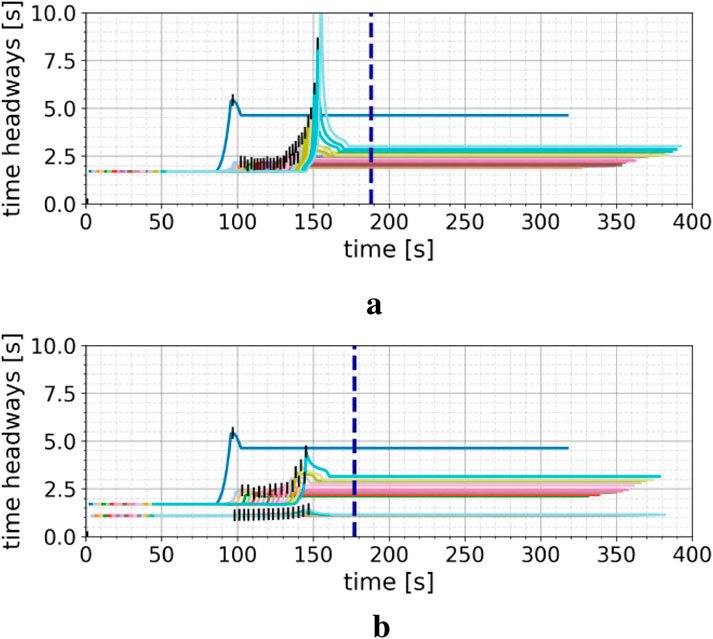
Figure 11. Time headways in a platoon experiment with 32 vehicles and varying AV–MV shares. Black markers indicate the maximum headway for each vehicle. The vertical blue dashed line marks the onset of system-wide headway stabilization (see text for criterion), after all ToCs are completed. (a) 100% AV vs. 0% MV share. (b) 50% AV vs. 50% MV share.
Therefore, we introduce two additional estimators. In Equation 1, instead of using a fixed
With these estimator-based
5 Results and discussion
Figure 12 presents the overall results obtained from the simulation study outlined in Section 4.1. First, we find that all maximum flows in the AV00 share, ranging between
1. No ToCs: The results (green line) show that up to share AV40, maximum flows remain relatively stable, with a reduction of approximately
2. Unmanaged: In the case of entirely unmanaged ToCs (blue-colored bars), maximum flow decreases progressively from approximately
3. Managed: When ToCs are managed within the ODD zone (gray-colored bars), maximum flows exhibit a similar decreasing trend but remain notably higher than in the unmanaged scenario. Flows decline from AV00 levels to approximately
4. Unmanaged “rightmost95”: This scenario exhibits the lowest flow values across all AV shares (red-colored bars). A decline in maximum flow is already noticeable at AV20 and continues consistently as the AV share increases, reaching a minimum of
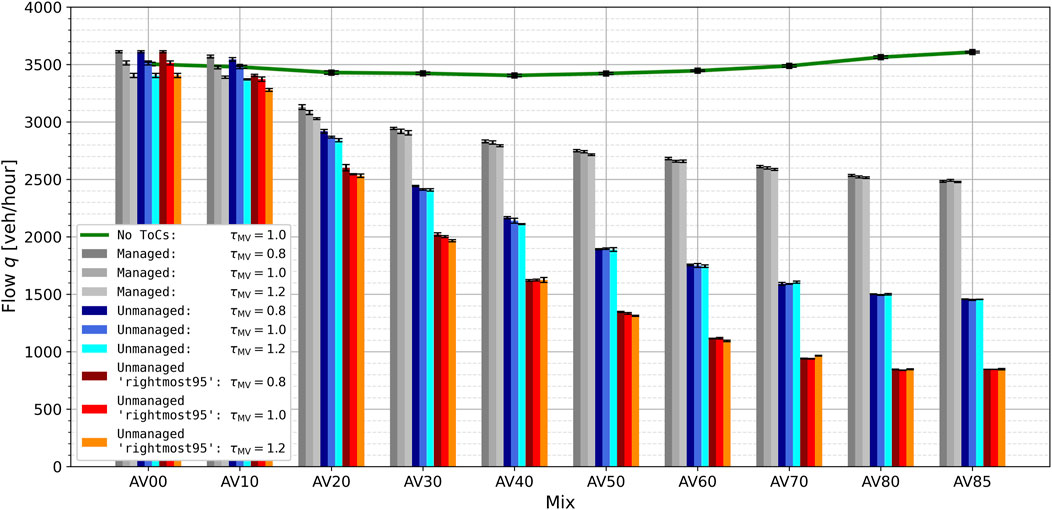
Figure 12. Maximum flow comparison across AV shares for the four scenarios: No ToCs (green line), Unmanaged ToCs (blue bars), Managed ToCs (gray bars), and Unmanaged “rightmost95” (red bars).
Overall, the results in Figure 12 show that in the unmanaged scenario, maximum flow declines significantly with increasing AV share. At AV85, the max flow is approximately
Furthermore, to compare these simulation results with the theoretical lane capacities estimated in Section 4.2 and Figure 10c, we derive the relative percentage reductions in capacity across the increasing AV share. Figure 13 summarizes these reductions for the unmanaged scenario, differentiating between the estimators max and mean, while constant is included as a reference that ignores ToC effects. For each estimator, we report the root mean squared error (RMSE) and the coefficient of determination (R2) to quantify the goodness of fit to the simulated capacity reductions—where lower RMSE and R2 values closer to one indicate better agreement with the simulation data. The simulated results reveal a capacity loss of up to nearly 60% at AV85. We also make the following observations:
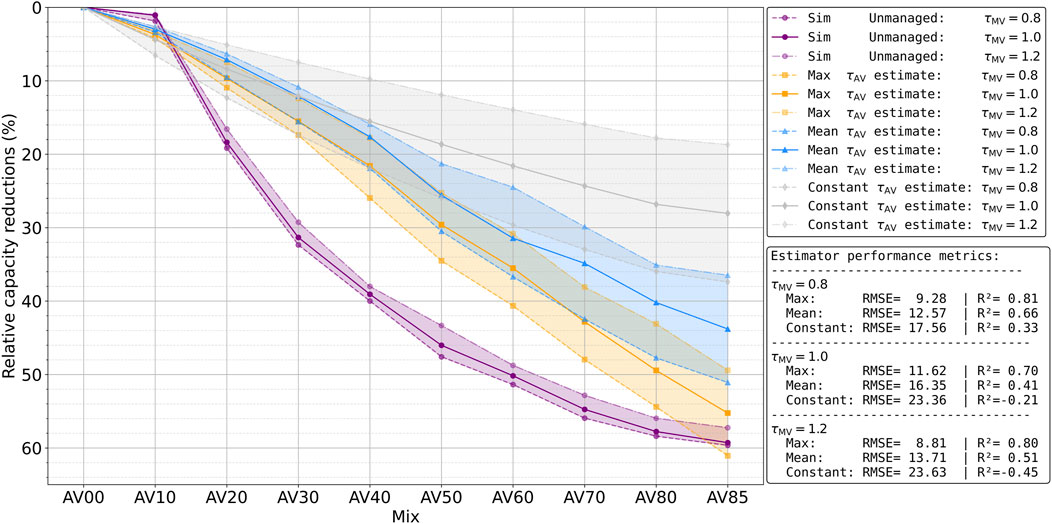
Figure 13. ToC-related relative percentage reductions of the capacity with varied mean
In summation, the capacity reductions observed in the simulation might align only unsatisfactorily with theoretical estimates, as deviations occur in the mid-range AV shares due to the simplified assumptions of the estimators. This partial mismatch is also reflected in the RMSE and R2 values, for which no established benchmarks exist in this context. Therefore, our assessment of estimator performance focuses on relative differences and qualitative trends within the observed results. However, the estimator max performs best in comparison to the simulation results, substantiating our suspicion that the maxima in time headway increments dominate ToC-related capacity effects. Nevertheless, the overall findings from Figures 12, 13 highlight the potential ToC effects on capacity reductions across various scenarios and parameter dependencies, in line with the stated expectations.
6 Conclusion
To investigate ToC-related capacity reductions, we conducted comprehensive simulation experiments with a calibrated two-lane highway scenario, as well as numerical experiments to estimate the large-scale impact of time headway increments during consecutive control transitions. Our main findings can be summarized as follows: (i) capacity reductions of up to
Several relevant limitations should be acknowledged, as they may affect the applicability and interpretation of our findings. Recent research on data from Level 4 AVs reveals reduced time headways when MVs follow AVs (Jiao et al., 2024). Such effects, which might also apply to Level 3 systems, are not considered in this study. An additional aspect that has not yet been discussed is the impact of human response times for non-emergency ToCs. Throughout this investigation, the response time distribution was kept the same, at
Future work should therefore include the development of a more accurate Level 3 model in SUMO, for example, an ACC-based ALKS system, as well as a systematic investigation of how model assumptions and human response variability together affect traffic capacity. Another important direction is to further examine the effects of MRMs, which are relevant for failed Level 3 transitions and Level 4 automation, on overall traffic, especially if they are not managed properly.
Lastly, we would like to reflect on the broader capacity implications of AVs. Our overall vehicle parametrization inherently results in slightly reduced theoretical capacities—even without ToCs—due to the implementation of lower time headways for MVs and higher ones for AVs, which contrasts with assumptions commonly made in other studies. While experimental research has demonstrated counterbalancing effects at high AV shares, which our own simulations also imply, this effect is diminished in the context of Level 3 systems. Unlike Level 4 or CACC-equipped vehicles, Level 3 automation, in its current form, does not typically support the low time headways often assumed to contribute to capacity gains. However, practical capacity impacts at relevant market penetration rates between 10% and 20% are likely still many years away, leaving room for further technical and regulatory development of Level 3 systems. Yet, in combination with the ToC-related capacity constraints demonstrated in this study, we take a more cautious view and do not share the seemingly widespread optimism regarding beneficial capacity effects of AVs in the mid-term.
Data availability statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author contributions
RA: Conceptualization, Data curation, Formal Analysis, Investigation, Methodology, Software, Validation, Visualization, Writing – original draft, Writing – review and editing. PW: Conceptualization, Methodology, Supervision, Writing – review and editing.
Funding
The author(s) declare that no financial support was received for the research and/or publication of this article.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Alms, R., Noulis, A., Mintsis, E., Lücken, L., and Wagner, P. (2022). Reinforcement learning-based traffic control: mitigating the adverse impacts of control transitions. IEEE Open J. Intelligent Transp. Syst. 3, 187–198. doi:10.1109/OJITS.2022.3158688
Alms, R., and Wagner, P. (2024). Control transitions in level 3 automation: safety implications in mixed-autonomy traffic. Safety 10, 1. doi:10.3390/safety10010001
Alvarez Lopez, P., Banse, A., Barthauer, M., Behrisch, M., Couéraud, B., Erdmann, J., et al. (2025). Simulation of urban mobility (SUMO). doi:10.5281/zenodo.14796685
Alvarez Lopez, P., Behrisch, M., Bieker-Walz, L., Erdmann, J., Flötteröd, Y.-P., Hilbrich, R., et al. (2018). “Microscopic traffic simulation using SUMO,” in The 21st IEEE International Conference on Intelligent Transportation systems (IEEE), 2575–2582.
BASt (2021). Road Traffic Census Report 2021 - Ergebnisbericht der Straßenverkehrszählung 2021. Tech. rep. Fed. Highw. Res. Inst. (BASt).
Bolovinou, A., Anagnostopoulou, C., Roungas, V., Amditis, A., González, R. B., Coello, L. T., et al. (2023). HI-DRIVE Deliverable D3.1/Use cases definition and description. Tech. Rep. Eur. Comm.
Brilon, W., and Geistefeldt, J. (2010). Überprüfung der Bemessungswerte des HBS für Autobahnabschnitte außerhalb der Knotenpunkte, vol. 1033 of Forschung Straßenbau und Straßenverkehrstechnik. Bremerhaven, Germany: Wirtschaftsverl. NW Verl. für neue Wissenschaft.
British Standards Institution (2020). PAS 1883:2020 - operational design domain (ODD) taxonomy for automated driving systems (ADS) – specification. London, UK: British Standards Institution.
Calvert, S., and van Arem, B. (2020). A generic multi-level framework for microscopic traffic simulation with automated vehicles in mixed traffic. Transp. Res. Part C Emerg. Technol. 110, 291–311. doi:10.1016/j.trc.2019.11.019
FGSV (2015). Handbuch für die Bemessung von Straßenverkehrsanlagen: HBS 2015. No. FGSV 299 B in FGSV W1 - Wissensdokumente (Cologne, Germany: FGSV-Verl). 2015 Edn.
Friedrich, B. (2016). The effect of autonomous vehicles on traffic. Berlin, Heidelberg: Springer Berlin Heidelberg, 317–334. doi:10.1007/978-3-662-48847-8_16
Geistefeldt, J., Giuliani, S., Busch, F., Schendzielorz, T., Haug, A., Vortisch, P., et al. (2017). “HBS-conform simulation of freeway traffic flow,” in vol. 279 of Berichte der Bundesanstalt für Straßen- und Verkehrswesen, Reihe V: Verkehrstechnik (Germany: Federal Highway Research Institute).
Jiao, Y., Li, G., Calvert, S. C., van Cranenburgh, S., and van Lint, H. (2024). Beyond behavioural change: investigating alternative explanations for shorter time headways when human drivers follow automated vehicles. Transp. Res. Part C Emerg. Technol. 164, 104673. doi:10.1016/j.trc.2024.104673
Kohanpour, E., Davoodi, S. R., and Shaaban, K. (2025). Trends in autonomous vehicle performance: a comprehensive study of disengagements and mileage. Future Transp. 5, 38. doi:10.3390/futuretransp5020038
Liu, Q., Gao, C., Wang, H., Cai, Y., Chen, L., and Lv, C. (2024). Learning from trajectories: how heterogeneous CACC platoons affect the traffic flow in highway merging area. IEEE Trans. Veh. Technol. 73, 16212–16224. doi:10.1109/TVT.2024.3419143
Lücken, L., Mintsis, E., Porfyri, K., Alms, R., Flötteröd, Y.-P., and Koutras, D. (2019). “From automated to manual - modeling control transitions with SUMO,”in SUMO user conference 2019. Editors M. Weber, L. Bieker-Walz, R. Hilbrich, and M. Behrisch (Stockport, United Kingdom: EPiC Series in Computing), 62, 124–144. doi:10.29007/sfgk
Maerivoet, S., Akkermans, L., Carlier, K., Flötteröd, Y.-P., Lücken, L., Alms, R., et al. (2019). TransAID Deliverable 4.2 - preliminary simulation and assessment of enhanced traffic management measures. Tech. Rep. Eur. Comm.
McDonald, A. D., Alambeigi, H., Engström, J., Markkula, G., Vogelpohl, T., Dunne, J., et al. (2019). Toward computational simulations of behavior during automated driving takeovers: a review of the empirical and modeling literature. Hum. Factors 61, 642–688. doi:10.1177/0018720819829572
Mercedes-Benz Group (2024). Mercedes-Benz is approved for 95 km/h Level 3 autonomous driving in Germany. Tech. Rep. Mercedes Benz Group.
Mintsis, E., Koutras, D., Porfyri, K., Mitsakis, E., Lücken, L., Erdmann, J., et al. (2019). TransAID Deliverable 3.1 - modelling, simulation and assessment of vehicle automations and automated vehicles’ driver behaviour in mixed traffic. Tech. Rep. Eur. Comm.
Park, J. E., Byun, W., Kim, Y., Ahn, H., and Shin, D. K. (2021). The impact of automated vehicles on traffic flow and road capacity on urban road networks. J. Adv. Transp. 2021, 1–10. doi:10.1155/2021/8404951
Pipkorn, L., Tivesten, E., Flannagan, C., and Dozza, M. (2023). Driver response to take-over requests in real traffic. IEEE Trans. Human Mach. Syst. 53, 823–833. doi:10.1109/THMS.2023.3304003
Rummel, J. (2017). Replication of the hbs autobahn with sumo. Berichte aus dem DLR-Institut für Verkehrssystemtechnik, Berlin, Germany: Institute of Transportation Systems, German Aerospace Center 171–178.
SAE International (2021). SAE international recommended practice: taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles. SAE Int. doi:10.4271/J3016_202104
Sauvaget, J.-L., Dakil, M., Griffon, T., Anagnostopoulou, C., Bolovinou, A., Sintonen, H., et al. (2023). HI-DRIVE deliverable D5.1/descriptions of “operations”. Tech. Rep. Eur. Comm.
Schrader, M. (2024). Calibrating traffic microsimulation for optimization of intelligent transportation systems using roadside radar. Tuscaloosa, AL: The University of Alabama. Ph.d. thesis.
Schulte-Tigges, J., Matheis, D., Reke, M., Walter, T., and Kaszner, D. (2023). “Demonstrating a V2X enabled system for transition of control and minimum risk manoeuvre when leaving the operational design domain,” in HCI in mobility, transport, and automotive systems. Editor H. Krömker (Cham: Springer Nature Switzerland), 200–210. doi:10.1007/978-3-031-35678-0_12
TransAID (2021). Transition areas for infrastructure-assisted driving (TransAID). H2020 Res. Proj. 723390, Eur. Comm.
UNECE (2023). Addendum 156 – UN regulation No. 157 - amendment 4 - uniform provisions concerning the approval of vehicles with regard to automated lane keeping systems. Tech. Rep. United Nations Economic commission for Europe.
Van Aerde, M. (1995). “A single regime speed-flow-density relationship for freeways and arterials,” in 74th annual meeting of the transportation research board. Preprint paper no. 950802.
Van Lint, J., and Calvert, S. C. (2018). A generic multi-level framework for microscopic traffic simulation—theory and an example case in modelling driver distraction. Transp. Res. Part B Methodol. 117, 63–86. doi:10.1016/j.trb.2018.08.009
Wagner, P. (2012). Analyzing fluctuations in car-following. Transp. Res. Part B Methodol. 46, 1384–1392. doi:10.1016/j.trb.2012.06.007
Wang, C., Ren, W., Xu, C., Zheng, N., Peng, C., and Tong, H. (2024). Exploring the impact of conditionally automated driving vehicles transferring control to human drivers on the stability of heterogeneous traffic flow. IEEE Trans. Intel. Veh., 1–17. doi:10.1109/TIV.2024.3419789
Wang, C., Xu, C., Peng, C., Tong, H., Ren, W., and and, Y. J. (2025a). Predicting the duration of reduced driver performance during the automated driving takeover process. J. Intel. Transp. Syst. 29, 218–233. doi:10.1080/15472450.2024.2307029
Wang, C., Xu, C., Shao, Y., Zheng, N., Peng, C., Tong, H., et al. (2025b). Identifying factors affecting driver takeover time and crash risk during the automated driving takeover process. J. Transp. Saf. Secur. 0, 1–26. doi:10.1080/19439962.2025.2450695
Ward, T. (2024). “Areas of improvement for autonomous vehicles: a machine learning analysis of disengagement reports,” in 2024 International Conference on Electrics and Computer (INTCEC). ArXiv:2408.00051.
Keywords: automated vehicles (AVs), level 3 automation, mixed-autonomy traffic, traffic capacity, transition of control (ToC)
Citation: Alms R and Wagner P (2025) Traffic capacity constraints from level 3 control transitions. Front. Future Transp. 6:1600739. doi: 10.3389/ffutr.2025.1600739
Received: 26 March 2025; Accepted: 16 June 2025;
Published: 07 July 2025.
Edited by:
Aleksandar Stevanovic, University of Pittsburgh, United StatesReviewed by:
Haifei Yang, Hohai University, ChinaZeynel Baran Yıldırım, Adana Science and Technology University, Türkiye
Changshuai Wang, Southeast University, China
Jana Sarran, University of Guyana, Guyana
Copyright © 2025 Alms and Wagner. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Robert Alms, Um9iZXJ0LkFsbXNAZGxyLmRl
†ORCID: Robert Alms, orcid.org/0000-0001-9950-3596; Peter Wagner, orcid.org/0000-0001-9097-8026