Abstract
Underwater noise from anthropogenic activities can have negative behavioral and physical effects on marine life, including physical changes, injuries, and death. Impact pile driving and vibratory pile driving are generally used for the construction of ocean-based foundations. Based on the field data under the same marine engineering and marine environment, this paper addresses the characteristics of underwater noise from impact and vibratory pile driving, their differences, and the effects of noise on populations of the large yellow croaker (Pseudosciaena crocea). The impact pile driving pulse had a median peak-to-peak sound pressure source level (SPLpp) of 244.7 dB re 1 μPa at 1 m and a median sound exposure source level (SELss) of 208.1 dB re 1 μPa2s at 1 m by linear regression. The waveform of vibratory pile driving appears to be continuous with a low SPLpp, but the cumulative SEL (SELcum) in 1 min is very high, reaching 207.5 dB re 1 μPa2s at 1 m. The range of behavioral response for adult large yellow croaker (20–23 cm) is predicted to be 4,798 m for impact pile driving and 1,779 m for vibratory pile driving. The study provides evidence of the comparative potential effects of vibratory and impact pile driving on the large yellow croaker and reference for the conservation of croaker.
Introduction
The increasing number of marine engineering construction, such as offshore wind farm projects, cross-sea bridges, and submarine tunnels, has attracted public attention to its environmental impact. In particular, the sound emanating from these anthropogenic activities has been shown to have a wide range of potential effects on marine life (Nowacek et al., 2007; Kight and Swaddle, 2011; Southall et al., 2019). The impact of underwater noise generated in different construction periods of marine engineering projects on marine life cannot be ignored. To minimize the impact of underwater noise on marine life, it is essential to establish controls on the acoustic characteristics of noise sources to meet the exposure criteria for different animals. Sound exposure criteria are the sound levels, based on acoustic response thresholds, above which sounds may have negative effects on specified animals (Hawkins et al., 2020).
In the past decades, many studies have been carried out to address the impact of underwater noise on marine mammals (National Research Council [NRC], 2003; Southall et al., 2007; National Marine Fisheries Service [NMFS], 2018). There is growing concern about the effects of anthropogenic noise on fishes in recent years, and more studies are necessary to address the issue (Popper and Hawkins, 2016; Popper and Hawkins, 2019; Hawkins et al., 2020). Sound is used for communication, reproduction, the detection of prey and predators, orientation and migration, and habitat selection (Webb et al., 2008). Therefore, anything that biologically interferes with how fish live can have a negative effect on them. However, there are still substantial knowledge gaps in the potential effects of sound on some fishes, such as the large yellow croaker (Pseudosciaena crocea). The large yellow croaker, which has significant economic value, is one of the important aquaculture fish species in China. Large yellow croakers are known to produce sound, the acoustic characteristics of which have been widely studied in recent years (Ramcharitar et al., 2006; Ren et al., 2007; Zhou et al., 2022). Moreover, most croakers are sensitive to sound through their otoliths and swim bladder (Zhang et al., 2021). Wang et al. (2017) studied the noise field distribution of underwater blasting and evaluated its impact on the large yellow croaker. The results suggested that for a 155-kg charge, a juvenile yellow croaker requires a safe range of approximately 2,500 m, while young fish and adult fish require a range of 1,600 and 900 m, respectively. Lin et al. (2019) designed two laboratory experiments to study the impacts of ship noise on the growth and immunophysiological response in the juveniles of two Sciaenidae species, Larimichthys crocea and Nibea albiflora. The results showed that the physiological indices of both L. crocea and N. albiflora increased sharply within 3 h due to ship noise stimulation, but after a month of noise stimulation, the growth and immune indices decreased significantly. However, the effects of underwater noise on the species have rarely been investigated (Horodysky et al., 2008).
Pile driving is a construction method generally used to provide foundation support for buildings and structures including offshore wind turbines, bridges, harbor facilities, and offshore oil and gas production structures (Reyff, 2012). There are mainly two types of pile driving based on mechanical principle: impact and vibratory. Impact pile driving occurs during the installation in construction projects using high-energy impact hammers, which creates an intense, impulsive, and sharp sound that radiates into the surrounding environment (Amaral et al., 2020). Many studies indicated that impact pile driving noise has adverse effects on marine life, including marine mammals (Nehls et al., 2007; Kastelein et al., 2013; Leunissen and Dawson, 2018; Leunissen et al., 2019) and fish (Casper et al., 2013; Bagocius, 2015; Hawkins and Popper, 2017). Unlike impact pile driving, vibratory pile driving describes the process in which the pile is vibrated into the sediment rather than being hammered in (Popper et al., 2022). The sound produced by vibratory pile driving is nonimpulsive and continuous, which is different from impact pile driving (Dahl et al., 2015; Jiménez-Arranz et al., 2020). Vibratory pile driving has been recommended as a quieter alternative to impact pile driving in some cases. However, only a few studies have been conducted to investigate the effects of vibratory pile driving on marine life (Wang et al., 2014; Branstetter et al., 2018), which focused on cetaceans. No studies about the effects of vibratory pile driving on fish have been conducted. Assessments of the potential impacts of sound exposures are typically used to distinguish between continuous sounds and impulse sounds. Because different kinds of sounds have different attributes, they may have very different effects on animals. Assessments should consider the intensity of the sound at the moment of exposure, the duration of individual exposure events, the integration of all exposure events, and the time interval between repeated exposure events (Hawkins et al., 2020).
The acoustic characteristics of the pile driving noise may be related to the local ocean environment. Therefore, the sound features and differences between impact and vibratory pile driving noise produced during the same marine engineering and marine environment were investigated. The sound data on received levels at different sites were collected to fit noise propagation for the research area. Finally, the effects of pile driving noise on populations of the large yellow croaker are also evaluated in this paper by the field observation of the behavioral response of yellow croakers at each site.
Acoustic measurements
The study was conducted within the Sandu Bay, Ningde City, Fujian Province, China. The large yellow croaker is the largest sea-cage culture fish in China, and more than 80% of large yellow croakers are produced in Ningde City (Chen et al., 2018). Measurements of underwater noise, including impact and vibratory pile driving noise, were made during the construction of the Dong-Wu-Yang cross-sea bridge in April and September 2022 (26.66°N, 119.94°E; Figure 1A), at water depths of approximately 40–60 m. The measurement of impact pile driving noise was carried out simultaneously at six locations on two range transects (blue solid circles in Figure 1A) during the installation of a steel casing pile (blue five-pointed star in Figure 1A), with a diameter of 2.5 m and a length of 80 m, on 1 April 2022. The pile was driven into the seabed using a hydraulic impact hammer (IHC-800, IHC, Kinderdijk, Netherlands Figure 1B) with an energy rating of 800 kJ. Underwater acoustic measurement for vibratory pile driving was conducted simultaneously at five locations on two range directions (red solid circles in Figure 1A) during the installation of five steel casing piles (red five-pointed stars in Figure 1A) from 7 to 14 September 2022. The diameter and length of five steel piles were 4.4 and 79 m, respectively. The piles were driven using a hydraulic vibratory piling hammer (YZ-800B, Yongan, Wenzhou, China) with a centrifugal force of 11,000 kN. The distances from the steel piles to the measurement locations were measured using a GNSS equipment (Global Navigation Satellite System (GNSS) N6, Sino, Guangzhou, China). To investigate the propagation attenuation of sound levels with distance for impact and vibratory pile driving noise, measurements were made at 80, 598, 664, 1,530, 3,563, and 4,573 m from the pile for impact pile driving and at 120, 717, 1,137, 1,484, and 1,933 m (averaged) for vibratory pile driving (Figure 1A).
Figure 1
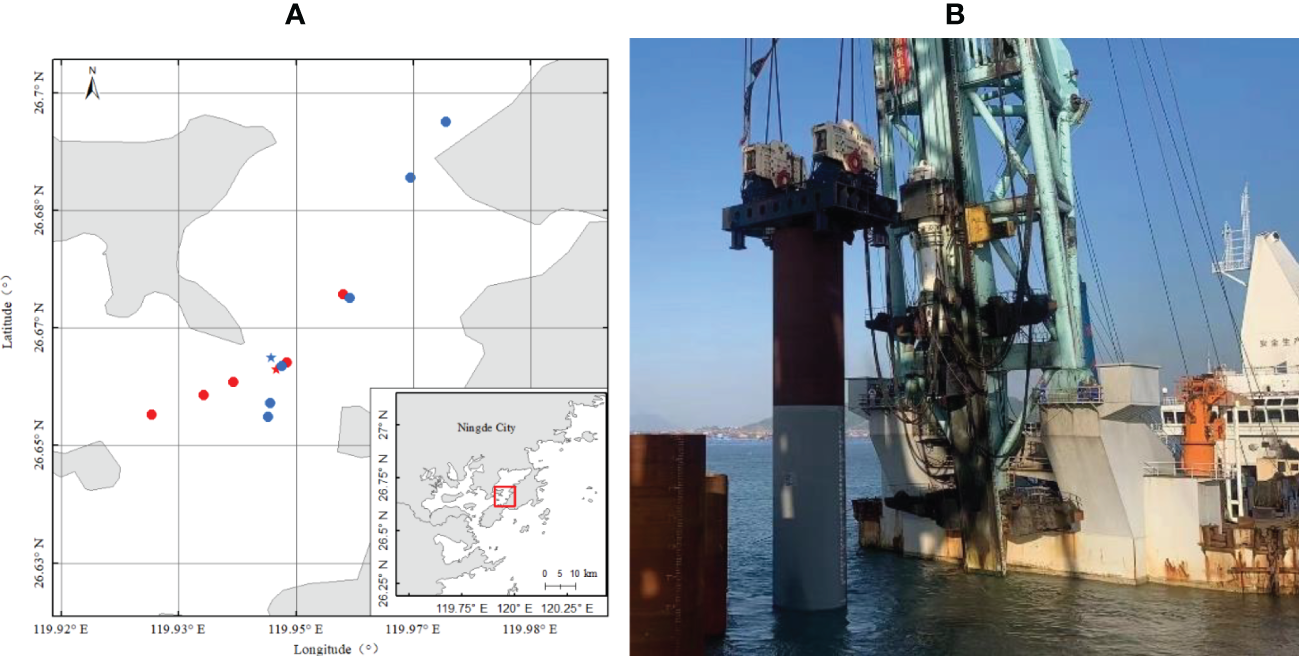
(A) Location of the steel casing piles and measurement sites. Five-pointed stars indicate the expected locations for pile driving. Solid circles represent the measurement sites. (B) Photograph of the cross-sea bridge construction.
All monitoring stations were equipped with the autonomous, low-power underwater acoustic recorders (USR2000, IOACAS) with hydrophones at a depth of 5 m. During the measurements, the deployment depth was recorded by a depth sensor (Duo-500, RBR) positioned 0.5 m above each hydrophone. The omnidirectional hydrophone has a flat frequency response (± 2 dB) between 20 Hz and 20 kHz. During the measurement of impact pile driving, recorders with a sampling frequency of 48 kHz were used in three stations with a distance of less than 1 km from each other, and the other three stations used hydrophones with an effective receiving sensitivity of −220 and −170 dB re 1 V/μPa. The recorders were sampled at 16 kHz and the hydrophones’ effective receiving sensitivity was −170 dB re 1 V/μPa for vibratory pile driving. Prior to measurements, all hydrophones were calibrated by the Hangzhou Institute of Applied Acoustics in Hangzhou, China. Water column sound speed measured by SVP (Minos X, AML Oceanographic) during the two measurements were 1,498 and 1,540 m/s, respectively. A portable depth sounder (SM-5, Speedtech, Great Falls, America) was used to measure the bathymetry of the study area. The average water depth at the pile position was approximately 55 m, which decreased subtly to approximately 40 m at 4,500 m to the northeast and approximately 30 m at 2,000 m to the southwest. The sediment layer in the study area consists of coarse sand and clay via sample analysis. In the same area, 10 min of ambient noise was measured when no pile driving occurred.
During the entire pile driving duration, field observation of the behavioral response of yellow croakers in a normal aquaculture cage at each site was also conducted. The size of the cage is 5 m × 5 m, with a depth of 8 m, which contains approximately 100,000 adult fishes. The sound exposure level in the cage was recorded while the behavioral response of croakers in the cage was observed. The average sound exposure level in multiple observations was estimated as the behavioral response threshold of croakers in this paper. In this paper, behavioral response is defined as the substantial change in the behavior of an animal population (the croakers, in this case) such as fleeing quickly, moving away from the sound source, and jumping out of the water.
The pile driving signals were detected and calculated by custom analysis scripts written in MATLAB R2019a. For impact pile driving, it can be characterized by using peak-to-peak sound pressure level (SPLpp) and sound exposure level (SEL), which indicate the maximum peak-to-peak pressure of the impulse signal and the total energy for the duration of a single pulse, respectively. The waveform of vibratory pile driving appears as a continuous signal with a low SPLpp; thus, the cumulative SEL (SELcum) in 1 min is calculated to characterize exposure energy. These are given by the following formulas:
where p(t) is the measured pressure signal. pref is the reference value of sound pressure (equal to 1 μPa) and tref is the reference value of time (equal to 1 s). t1 and t2 are the start and end points of time window, respectively, for a single exposure duration. The time interval is bounded by the times when the cumulative signal energy exceeds 5% of the total signal energy and ends when it reaches 95% for impulse signals (Southall et al., 2007). N is the number of signals.
The frequency spectrum of pile driving noise and ambient noise can be expressed in pressure spectral density in units of μPa2/Hz, which is computed in constant-width bands of 1 Hz.
Results
Acoustic characteristics of impact and vibratory pile driving noise
To investigate the differences in impact and vibratory pile driving noise, the pressure time series of the two signals are given in Figure 2, which were measured at 598 and 717 m from the sound source, respectively. The waveform of ambient noise and an expanded signal of impact pile driving are also shown in Figure 2. The waveform of impact pile driving noise consists of several Mach waves called a Mach cone (Reinhall and Dahl, 2011). Because the study focuses on the difference in underwater noise from impact and vibratory pile driving and its effect on the large yellow croaker, the details of Mach waves were not measured in the paper.
Figure 2
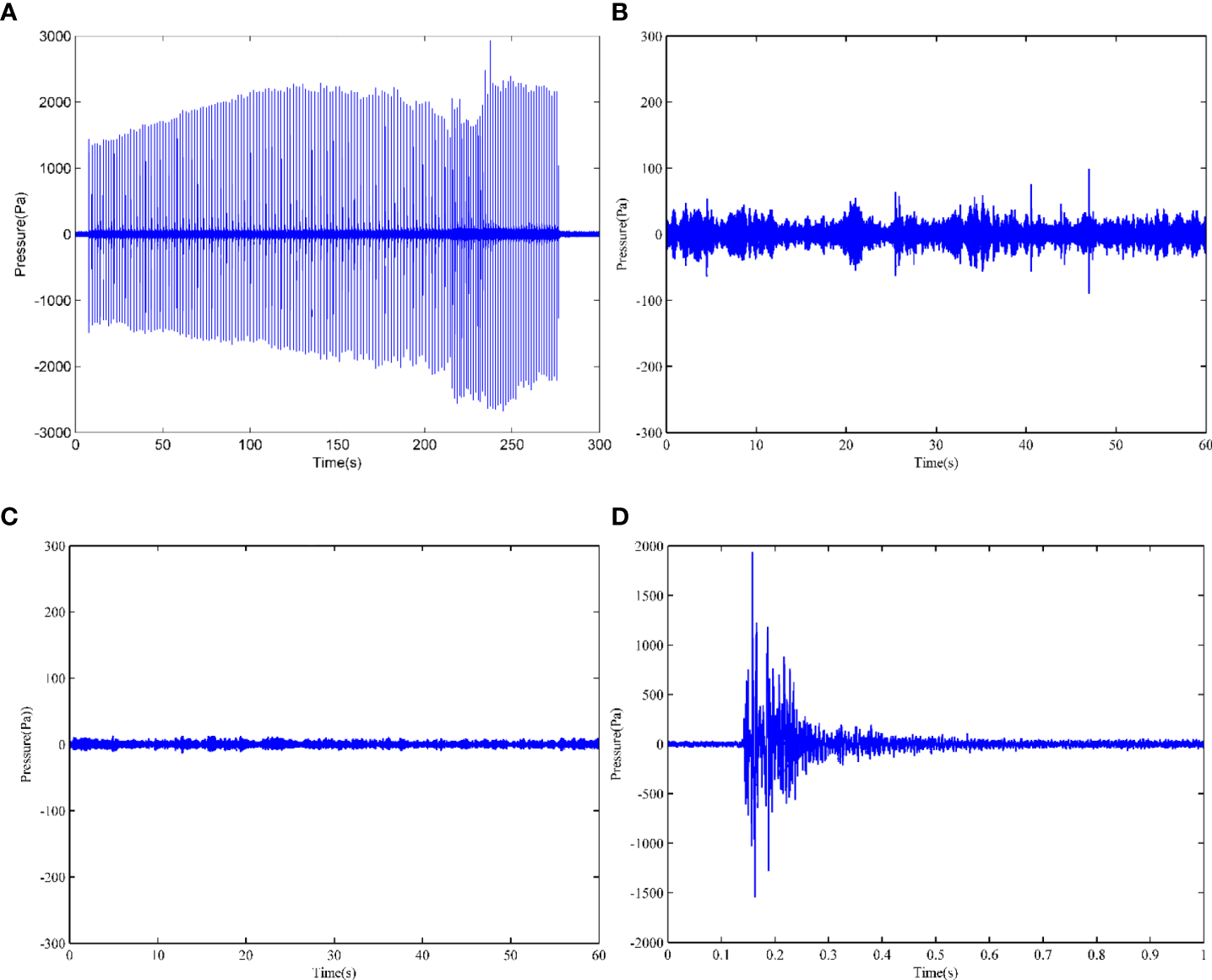
Sound pressure time series (A) and an expanded signal (D) of impact pile driving noise measured at 598 m from the pile. Sound pressure time series of vibratory pile driving noise (B) measured at 717 m from the pile. Waveform of ambient noise (C) measured at pile position.
Underwater noise from impact pile driving appeared in a time series of single impulse signals (Figures 2A, D). The mean duration of the impulse including 90% of the energy was approximately 121 ms. Figure 2A also shows that the sound pressure amplitudes of received signals in the same distance varied with the time series. SPLpp increased from 187 to 191 dB. The cause of the variations in SPLpp may be related to the energy per strike. Hammer strikes were repeated until the pile was driven to the desired depth. Impact pile driving is always initiated with a soft-start period in the early stages, in which the hammer energy was initially low and gradually increased to reach the required stroke strength. Data for the initial strikes corresponding to the soft-start period were excluded. During the measurements, the hammer strikes were repeated 160 times for 4 min. Figures 3A–C respectively depict the measured SPLpp, SELss, and strike energy as a function of the number of hammer strikes for 160 strikes. The range values of SPLpp and SELss were 162–166 dB with a mean value of 189.7 ± 1.2 dB and 189–195 dB with a mean value of 159.8 ± 1.2 dB, respectively. The strike energy increased from 150 to 350 kJ. The relation curve between SELss and the strike energy of each hammer strike is shown in Figure 3D. With the increase in strike energy, SELss increased correspondingly. When strike energy was increased from 150 to 350 kJ, SELss was increased by approximately 4 dB. However, the difference in SELss was little because of the slight variation in strike energy.
Figure 3
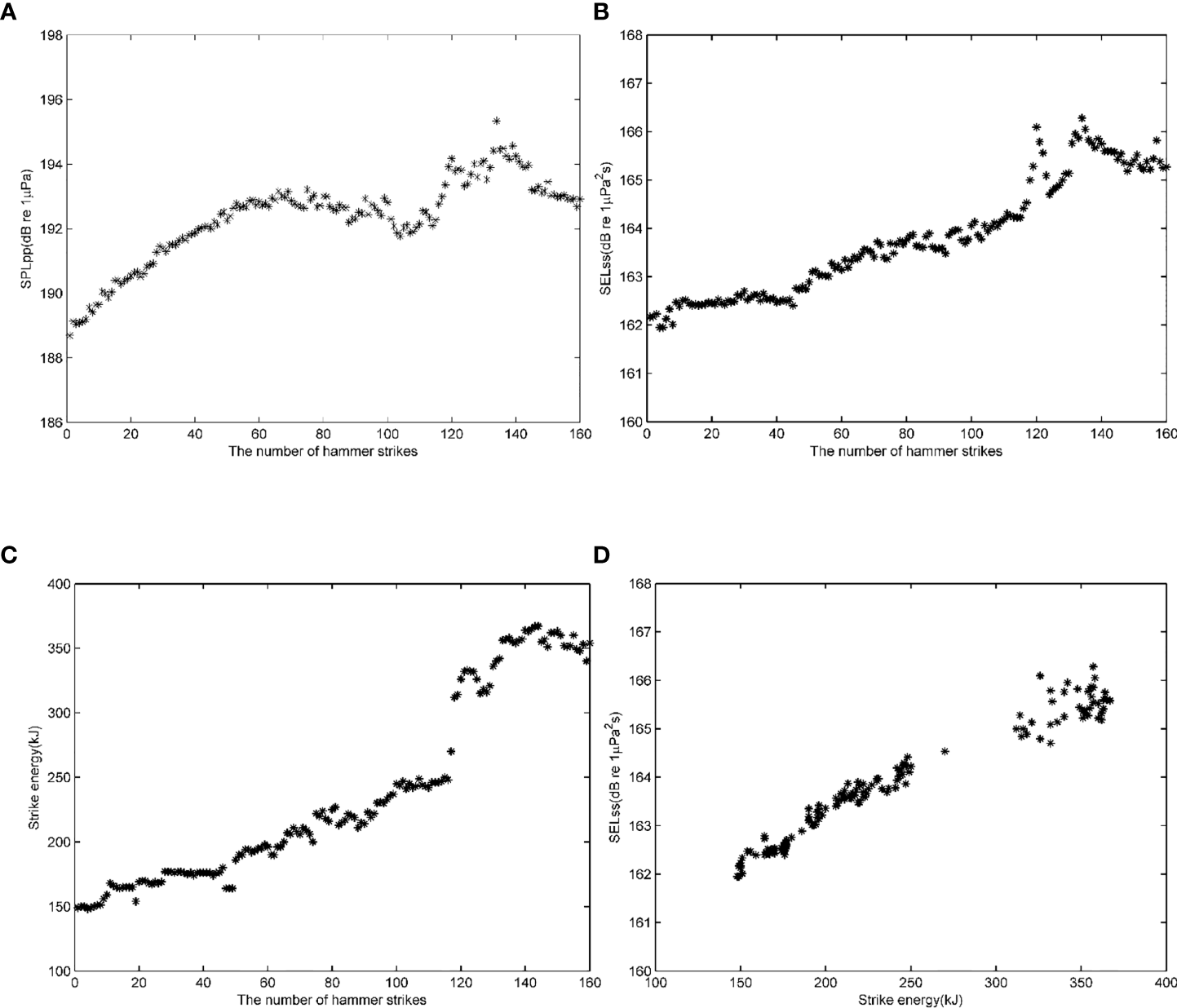
(A) Measured peak-to-peak sound pressure levels and (B) sound exposure levels at the range of 598 m as a function of the number of hammer strikes for impact pile driving noise. (C) Strike energy as a function of the number of hammer strikes for impact pile driving. (D) SELss versus strike energy for each hammer strike for impact pile driving.
The SPLpp of underwater noise generated from vibratory pile driving presented a continuous signal without a maximum value and a lower level than impact pile driving (Figure 2B). The mean-square pressure level reached over 1 s of averaging in the time series with a length of 1 min was 149.3 dB.
Figure 4 shows the averaged narrow-band (resolution, 1 Hz) pressure spectral densities for impact pile driving noise from 160 hammer strikes at the range of 598 m and for vibratory pile driving noise based on 3 min of sound data at the range of 717 m. To show contrast with pile driving noise, the pressure spectral densities of background ambient noise are also analyzed and presented in Figure 4. It can be seen from the figure that the noise spectrum of the two types of pile driving was different. The acoustic energy from impact pile driving concentrated between 100 and 1,000 Hz, which was approximately 40 dB higher than noise in the same frequency band from vibratory pile driving. In addition, the overall frequency band of sound levels for impact pile driving noise was also much higher than natural ambient sound levels. The spectral analysis also showed that the acoustic energy from vibratory pile driving was distributed below 100 Hz and decreased at a rate of approximately 6 dB/octave with increasing frequency in the bands. Although sound levels in some higher-frequency components (>700 Hz) had no difference between vibratory pile driving and natural ambient noise, the overall sound levels during vibratory pile driving were higher than ambient noise.
Figure 4
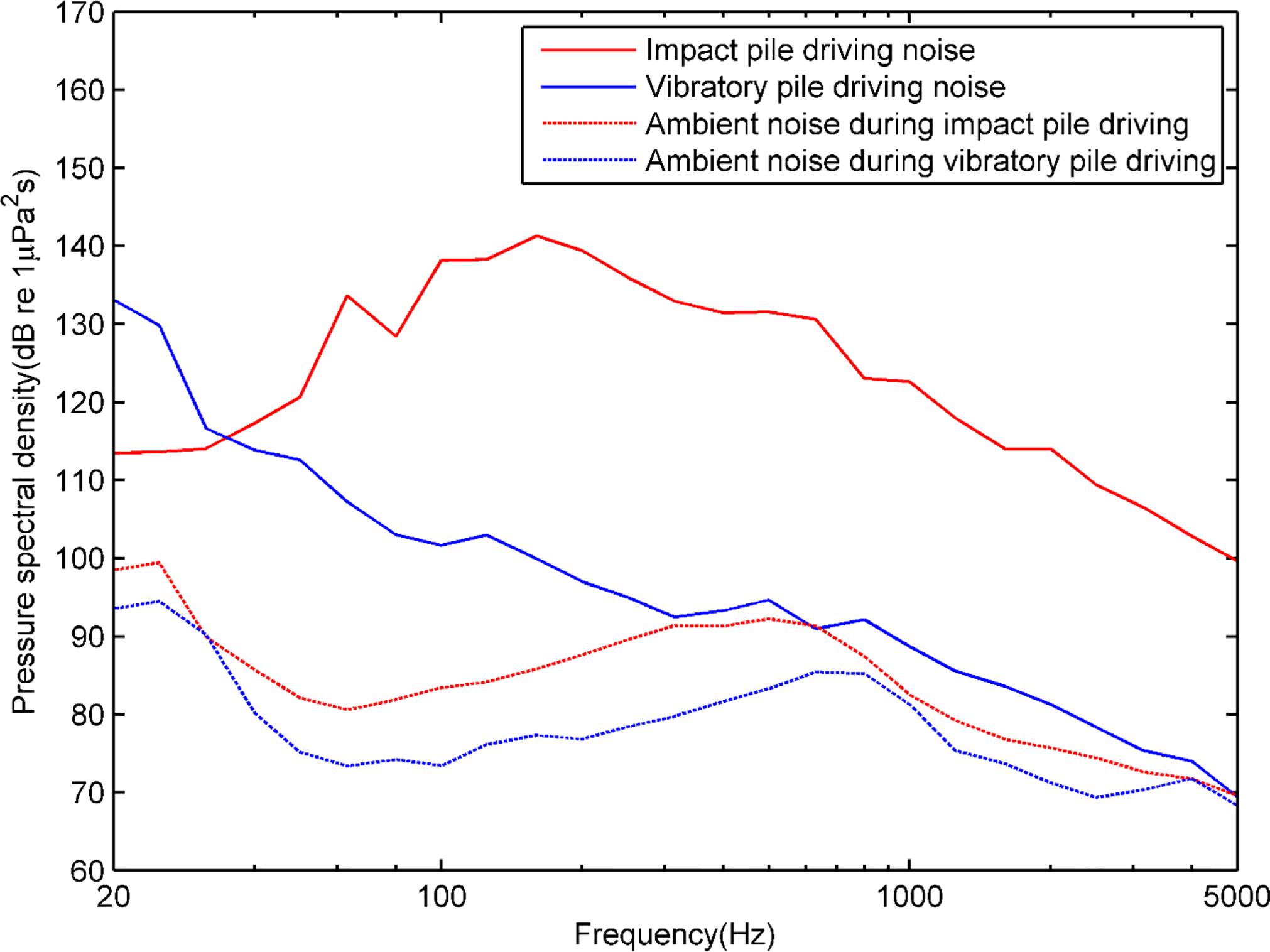
Comparison of the spectrum levels between impact and vibratory pile driving noise, and ambient noise. The red line represents the averaged Pressure spectral density (PSD) measured at the range of 598 m for 160 strikes. The blue line represents the PSD based on the 3-min time series of data measured at the range of 717 m for vibratory pile driving. The dashed lines display the PSD of ambient noise during impact and vibratory pile driving.
Variation of impact and vibratory pile driving noise with distance
Regression analysis is used to estimate the sound source levels based on the measured data. The commonly used measures of acoustic propagation loss in shallow water are the geometrical spreading laws for sound intensity, i.e., the spherical, intermediate, and cylindrical spreading laws, often called the 20 log r, 15 log r, and 10 log r laws, where r is the distance from the sound source. To begin with, the transition from 20 log r to 15 log r to 10 log r was a continuous one. The Marsh–Schulkin (M–S) equation used the concept of skip distance for acoustic propagation in shallow water (Urick, 1983). The M–S skip distance R, in kilometers, is
where H, in meters, is the depth of water and L, in meters, is the depth of the mixed layer. The mean depth of water in the study region is 44 m, and the depth of the mixed layer is approximately 5 m. R is calculated to be 4,041 m. Therefore, only data within a distance of 4,041 m were used for regression analysis.
Figures 5A–C show the mean of measured SPLpps, SELsss (for impact pile driving), and SELcums (for vibratory pile driving) as a function of distance and their comparisons with a regression curve based on the measured values. Because of the strong acoustic interaction with the seafloor due to a downward radiation of pile driving noise, the energy loss appeared to rapidly increase with increasing distance (Han and Choi, 2022). Sound transmission loss coefficients were calculated by the linear curve fitting of median values to estimate the sound levels with distance. The results of regression indicate that the best-fitting data were 20.4 log r (goodness of fit, R2 = 0.97), 18.5 log r (R2 = 0.93), and 19.2 log r (R2 = 0.95), which were consistent with spherical spreading transmission loss (20 log r), where r is the distance in meters from the pile, in meters. The uncertainty of measured data excluded the difference caused by the depth of the pile penetrating the seabed. The average values and standard deviations are listed in Table 1.
Figure 5
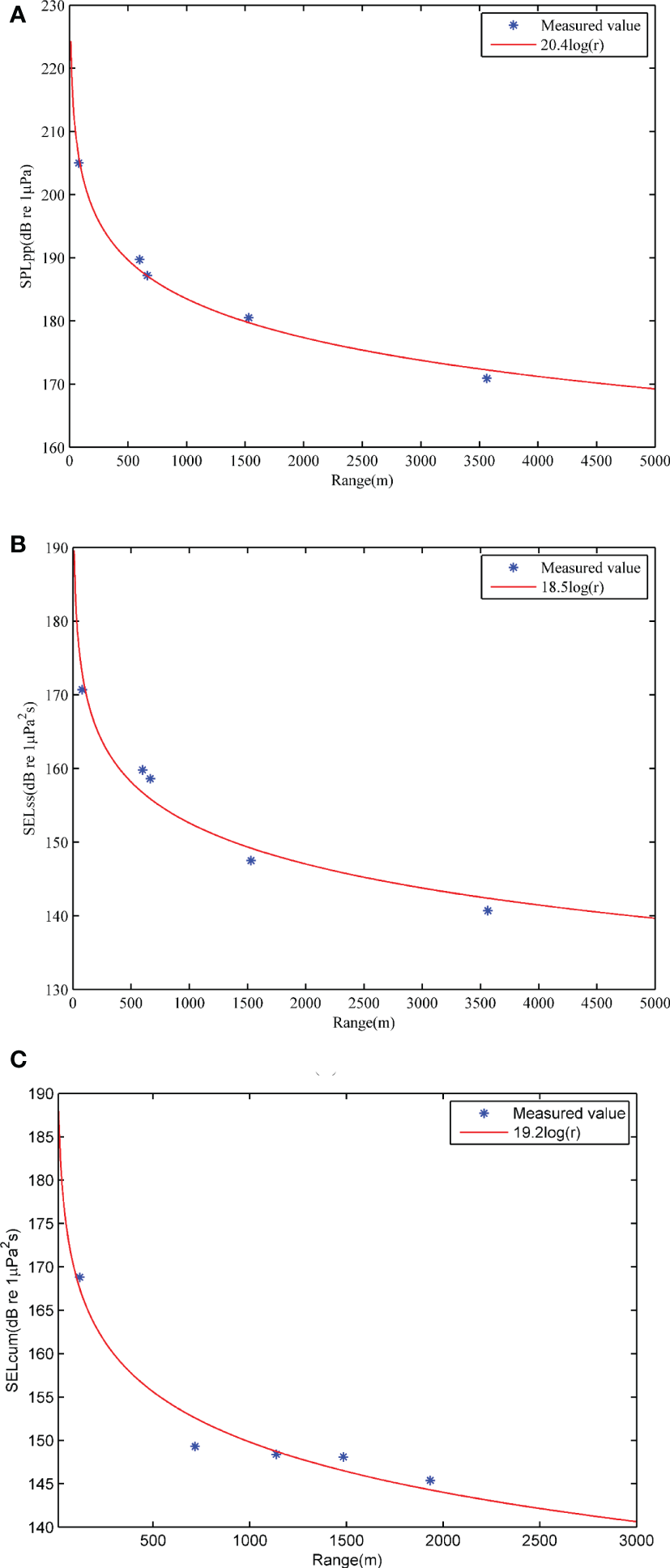
(A) The peak-to-peak sound pressure levels, (B) single sound exposure levels, and (C) cumulative sound exposure levels estimated as a function of distance and their comparisons with regression curves. The blue points represent the averaged measured values at different ranges. The red line represents the regression curve based on the measured values.
Table 1
| Range (m) | 80 | 598 | 664 | 1,530 | 3,563 |
| SPLpp (dB) | 205.0 ± 1.3 | 189.7 ± 1.2 | 187.2 ± 1.8 | 180.5 ± 1.5 | 170.9 ± 1.5 |
| SELss (dB) | 170.7 ± 1.5 | 159.8 ± 1.2 | 158.6 ± 1.8 | 147.5 ± 1.3 | 140.7 ± 1.7 |
| Range (m) | 120 | 717 | 1,137 | 1,484 | 1,933 |
| SELcum (dB) | 168.8 ± 8.6 | 149.3 ± 9.3 | 148.4 ± 8.0 | 148.1 ± 3.4 | 145.4 ± 4.8 |
Peak-to-peak pressure levels, single sound exposure levels, and cumulative sound exposure levels for pile driving as a function of distance.
The impulse number used in the analysis for impact pile driving was 160. The pile number used in the analysis for vibratory pile driving was 5.
The peak-to-peak pressure level versus the strike number and the sound exposure level are used to describe the pile driving noise. The results show that the mean peak-to-peak sound pressure source level and single-pulse sound exposure source level for impact pile driving are 244.7 and 208.1 dB, respectively, which are consistent with the calculation result of Wyatt’s empirical formula (Wyatt, 2008). The waveform of vibratory pile driving appeared as a continuous signal with low SPLpp, but the cumulative sound exposure source level in 1 min was also very high, approximately 207.5 dB.
Effects of pile driving noise on the behavior of the large yellow croaker
Before pile driving started, the large yellow croaker swam normally without any abnormal behavior. At the beginning of pile driving, the croaker showed a behavioral response (Figure 6). The degree of behavioral response varied at different distances. Table 2 shows the behavioral response of the croaker at different distances during pile driving and the sound exposure values when behavioral response appeared. Within a few minutes after pile driving stopped, the croaker returned to normal behavior.
Figure 6
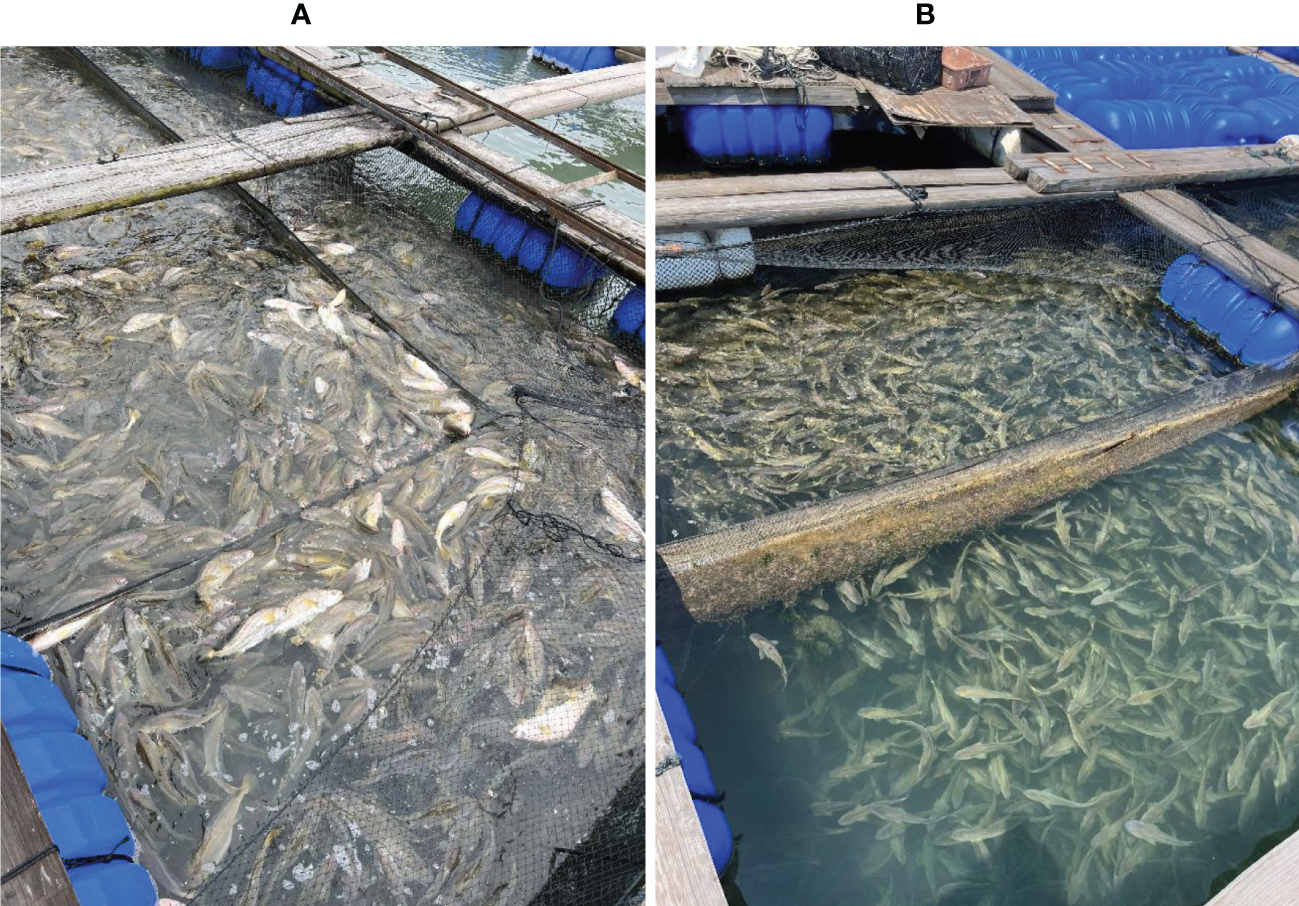
Picture of the behavioral response of the large yellow croaker at the range of 598 m for impact pile driving (A) and at the range of 717 m for vibratory pile driving (B) at the beginning of pile driving.
Table 2
| Range (m) | SELss (dB) | Behavioral response | |
|---|---|---|---|
| Impact pile driving | 598 | 156.7 | Strong changes in behavior, such as fleeing quickly, with some jumping out of the water and rolling their belly |
| 664 | 155.6 | Strong changes in behavior, such as fleeing quickly, with some jumping out of the water and rolling their belly | |
| 1,530 | 144.5 | Substantial changes in behavior, such as fleeing quickly | |
| 3,563 | 140.7 | Some changes in behavior, such as emerging from the surface and swimming faster | |
| 4,573 | 140.1 | Minor changes in behavior, such as swimming faster | |
| 5,100 | 138.9 | Normal swimming, no obvious observed response | |
| Vibratory pile driving | Range (m) | Averaged SELcum (dB) | Behavioral response |
| 717 | 148.9 | Strong changes in behavior, such as fleeing quickly, with some jumping out of the water | |
| 1,137 | 147.8 | Some changes in behavior, such as emerging from the surface and swimming faster | |
| 1,484 | 147.6 | Some changes in behavior, such as emerging from the surface and swimming faster | |
| 1,933 | 145.1 | Minor changes in behavior, such as swimming faster | |
| 2,837 | 143.2 | Normal swimming, no obvious observed response |
Behavioral response of croakers at different distances and the sound exposure values when behavioral response appeared during pile driving.
The pile number used in the analysis for vibratory pile driving was 5.
Based on the results of field observation of behavioral response of the large yellow croaker and corresponding sound measurement data at each site, the statistical onset of behavioral responses occurred in adult large yellow croakers (20–23 cm) exposed to a SELss of 140 dB for impact pile driving and a SELcum in 1 min of 145 dB for vibratory pile driving. Therefore, based on attenuation coefficients of acoustic propagation and sound source levels obtained from measured data fitting and the behavioral response thresholds, the range of influence can be calculated by the following equation:
When received sound levels are equal to the behavioral response thresholds, the calculated range values are the influence range. The range of behavioral response for adult large yellow croakers (20–23 cm) was calculated to be 4,798 m for impact pile driving and 1,779 m for vibratory pile driving, respectively. The impact of underwater noise on the large yellow croaker is obviously greater than that of vibratory pile driving (Figure 6).
Discussion and conclusion
Underwater noise from impact and vibratory pile driving was measured simultaneously at different distances during the construction of the Dong-Wu-Yang cross-sea bridge. The SPLpps and SELsss of impact pile driving were measured at six positions at the range of 80–5,000 m, and the sound source levels were also estimated based on the measured values. In the same marine project, the measurements from vibratory pile driving were also taken simultaneously at five positions at the range of 120–2,000 m. The SPLpps values of underwater noise from vibratory pile driving were lower than those from impact pile driving; thus, cumulative sound exposure source levels in 1 min were calculated by linear regression analysis. Based on the linear regressions, the average SELss of impact pile driving and SELcum in 1 min of vibratory pile driving were predicted to be approximately 208.1 dB re 1 μPa2s at 1 m and 207.5 dB re 1 μPa2s at 1 m, respectively. The frequency spectrum calculated over a given bandwidth, generally, 1 Hz or one-third octave is also important. As different animals have different frequency responses, it is important to indicate the frequency bandwidth (Popper and Hawkins, 2019). The averaged narrow-band (resolution, 1 Hz) pressure spectral densities for impact and vibratory pile driving were different. The acoustic energy from impact and vibratory pile driving was concentrated between 100 and 1,000 Hz and below 100 Hz, respectively. The overall sound levels during impact and vibratory pile driving were higher than ambient noise levels.
The propagation properties of noise were determined by linear fitting regression to analyze the effect of underwater noise on marine animals. The propagation loss model is usually defined by N log r, where N is the spreading loss constant and r is the distance in meters. The regressive results showed that N was 20.4 (SPLpp) and 18.5 (SELss) for impact pile driving, and 19.2 (SELcum) for vibratory pile driving, which were consistent with spherical spreading transmission loss (20 log r). However, in the same marine construction project, the propagation attenuation coefficients of the two kinds of pile driving noise are different. The difference is reasonable because the coefficients are related to water column sound speed. During the measurement of vibratory pile driving, the sound speed is obviously higher than that of impact pile driving. For impact pile driving, although a previous study indicated that a relatively rapid energy loss with increasing distance was observed because of the strong acoustic interaction with the seafloor of Mach cone wave sequence radiating upwards and downwards (Han and Choi, 2022), the propagation attenuation in our study did not increase significantly with distance. The possible reason is that the hydrophone in measurements is close to the sea surface and far away from the seafloor. Three-dimensional (3D) effects can vastly affect acoustic propagation in a complex shallow water environment. Underwater sound wave is affected by a series of geological features and physical oceanographic processes and can produce horizontal reflection, refraction, and diffraction (Oliveira et al., 2021). Because variation in water depth and geological features in the study area is small, the 3D sound propagation effect is ignored in the present study. To improve the accuracy of sound source level prediction, an underwater sound propagation model should be selected to calculate transmission loss in the future.
Liu et al. (2014) investigated the peak sound pressure level safe threshold for the large yellow croaker through the acoustic stimulation experiment in the laboratory. However, sound exposure time and population effects were not considered in the experiment. Unlike marine mammals, it is more important to focus on population effects than individuals for fishes (Popper and Hawkins, 2016; Pirotta et al., 2018). The sound exposure level should be used to evaluate its effect on large yellow croaker populations. Based on field observation, the use of single-pulse SEL as assessment criteria for impact pile driving is suggested. The underwater noise from vibratory pile driving has a low sound pressure level; therefore, the SELcum over a given period of time is recommended. The accumulative period should be carefully detailed. The SELcum may be defined over a standard period or for the duration of an activity, or over the entire period that the animal will be exposed (Popper et al., 2014). In addition, the distribution and changes in the magnitude of sound events within that period also need to be considered. In the present study, the cumulative exposure time selected for the period with the highest amplitude is 1 min. However, choosing the cumulative time still needs to be investigated in the future when we can better understand the effects of anthropogenic noise on fishes.
Because not all anthropogenic noise can have a negative effect on fish, impact criteria must be regulated by how fishes respond to sound exposures. The effects on fishes mainly include death and injuries, physiological effects, and changes in behavior. Behavioral responses will be especially detrimental if fishes are more exposed to predators, are displaced from feeding or spawning grounds, have their migrations affected, or experience disruption of communication between individuals (Hawkins et al., 2020). However, these behavioral characteristics are difficult to observe for cage-cultured larger yellow croakers. It is more appropriate to consider the population effects. A criterion currently recommended by the National Marine Fisheries Service (NMFS) for behavioral response is 150 dB (Stadler and Woodbury, 2009); however, whether the value is a peak or root mean square (rms) level is not indicated. Through observation of the behavioral response in the field experiment, the criterion is not suitable to evaluate the effects on the larger yellow croaker. The sound exposure level should be used to evaluate its effect on the large yellow croaker.
Finally, based on sound propagation attenuation and the behavioral response thresholds, the range of behavioral response for adult large yellow croakers is calculated to be 4,798 m for impact pile driving and 1,779 m for vibratory pile driving. For noise due to underwater blasting of a 155-kg charge, adult large yellow croakers require a safe range of 900 m (Wang et al., 2017). The influence of pile driving noise on the large yellow croaker is larger than that of a small charge of underwater blasting. However, the influence of underwater blasting increased with increasing blasting charge. The accuracy of measurement and assessment results in the study is verified by simultaneous field observation of the behavior of the large yellow croaker. It is obvious that the influence range given in this paper was only used as a reference value for pile driving noise due to lack of sufficient test data. It is very difficult to set an acoustic response threshold for croakers because it is dependent on a suite of factors, such as individual differences, densities, and circumstances. As human activities in the ocean have increased, it is therefore important to assess the noise impact, including the measurements of pile driving noise levels, and investigate their propagation properties as a function of distance. The purpose of the present study is to enhance the understanding of the potential effect of pile driving on the large yellow croaker and provide reference for the conservation of croaker.
Statements
Data availability statement
The original contributions presented in the study are included in the article/supplementary material. Further inquiries can be directed to the corresponding author.
Ethics statement
Ethical review and approval was not required for the study of animals in accordance with the local legislation and institutional requirements. The study investigates the behavioral response of the large yellow croaker. No auditory or physical damage is caused to the large yellow croaker. Therefore, ethical approval is not required.
Author contributions
FN: investigation, methodology, formal analysis, and writing—original draft and review. JX and RX: data curation and acoustic data analysis. XZ, BC, and ZL: supervision, validation, and writing—review and editing. YY: methodology and writing—review and editing. All authors contributed to the article and approved the submitted version.
Funding
This research was supported by grants from the National Natural Science Foundation of China (41976175), the Scientific Research Foundation of the Third Institute of Oceanography, Ministry of Natural Resources (2020017), the Natural Science Foundation of Fujian Province (2020J01696), and the High Level Research and Cultivation Fund of Transportation Engineering of Jimei University (HHXY2020016).
Conflict of interest
Author XZ is employed by Zhejiang Communications Construction Group Co. Ltd.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
1
Amaral J. L. Miller J. H. Potty G. R. Vigness-Raposa K. J. Frankel A. S. Lin Y. T. et al . (2020). Characterization of impact pile driving signals during installation of offshore wind turbine foundations. J. Acoust. Soc. Am.147, 2323–2333. doi: 10.1121/10.0001035
2
Bagocius D. (2015). Piling underwater noise impact on migrating salmon fish during Lithuanian LNG terminal construction (Curonian lagoon, Eastern Baltic Sea coast). Mar. Pollut. Bull.92, 45–51. doi: 10.1016/j.marpolbul.2015.01.002
3
Branstetter B. K. Bowman V. F. Houser D. S. Tormey M. Banks P. Finneran J. J. et al . (2018). Effects of vibratory pile driver noise on echolocation and vigilance in bottlenose dolphins (Tursiops truncatus). J. Acoust. Soc. Am.143, 429–439. doi: 10.1121/1.5021555
4
Casper B. M. Smith M. E. Halvorsen M. B. Sun H. Carlson T. J. Popper A. N. (2013). Effects of exposure to pile driving sounds on fish inner ear tissues. Comp. Biochem. Physiol. A. Mol. Integr. Physiol.166, 352–360. doi: 10.1016/j.cbpa.2013.07.008
5
Chen S. X. Su Y. Q. Hong W. S. (2018). “Aquaculture of the Large yellow croaker,” in Aquaculture in China: success stories and modern trends (Wiley Blackwell), 297–308. doi: 10.1002/9781119120759.ch3_10
6
Dahl P. H. Dall’Osto D. R. Farrell D. M. (2015). The underwater sound field from vibratory pile driving. J. Acoust. Soc. Am.137, 3544–3554. doi: 10.1121/1.4921288
7
Han D. G. Choi J. W. (2022). Measurements and spatial distribution simulation of impact pile driving underwater noise generated during the construction of offshore wind power plant off the southwest coast of Korea. Front. Mar. Sci.8. doi: 10.3389/fmars.2021.654991
8
Hawkins A. D. Johnson C. Popper A. N. (2020). How to set sound exposure criteria for fishes. J. Acoust. Soc. Am.147, 1762–1777. doi: 10.1121/10.0000907
9
Hawkins A. D. Popper A. N. (2017). A sound approach to assessing the impact of underwater noise on marine fishes and invertebrates. ICES. J. Mar. Sci.74, 635–651. doi: 10.1093/icesjms/fsw205
10
Horodysky A. Z. Brill R. W. Fine M. L. Musick J. A. Latour R. J. (2008). Acoustic pressure and particle motion thresholds in six sciaenid fishes. J. Exp. Biol.211, 1504–1511. doi: 10.1242/jeb.016196
11
Jiménez-Arranz G. Banda N. Cook S. Wyatt R. (2020). Review on existing data on underwater sounds from pile driving activities (Seiche Ltd for the Joint Industry Programme (JIP) on E&P Sound and Marine Life). Available at: www.soundandmarinelife.org.
12
Kastelein R. A. van Heerden D. Gransier R. Hoek L. (2013). Behavioral responses of a harbor porpoise (Phocoena phocoena) to playbacks of broadband pile driving sounds. Mar. Environ. Res.92, 206–214. doi: 10.1016/j.marenvres.2013.09.020
13
Kight C. R. Swaddle J. P. (2011). How and why environmental noise impacts animals: an integrative, mechanistic review. Ecol. Lett.14, 1052–1061. doi: 10.1111/j.1461-0248.2011.01664.x
14
Leunissen E. M. Dawson S. M. (2018). Underwater noise levels of pile-driving in a new Zealand harbor, and the potential impacts on endangered hector’s dolphins. Mar. Pollut. Bull.135, 195–204. doi: 10.1016/j.marpolbul.2018.07.024
15
Leunissen E. M. Rayment W. J. Dawson S. M. (2019). Impact of pile-driving on hector’s dolphin in lyttelton harbour, new Zealand. Mar. Pollut. Bull.142, 31–42. doi: 10.1016/j.marpolbul.2019.03.017
16
Lin T. T. Wang C. B. Liu X. Zhang D. (2019). Impacts of ship noise on the growth and immunophysiological response in the juveniles of two sciaenidae species, Larimichthys crocea and Nibea albiflora. J. Appl. Ichthyol.35, 1234–1241. doi: 10.1111/jai.13976
17
Liu Z. W. Xu X. M. Huang E. H. Yang Y. M. (2014). Study on behavior of sound stimulation for large yellow croaker (Pseudosciaena crocea). J. Appl. Oceanogr.33, 105–110. doi: 10.3969/J.ISSN.2095-4972.2014.01.014
18
National Marine Fisheries Service [NMFS] (2018). “Technical guidance for assessing the effects of anthropogenic sound on marine mammal hearing (Version 2.0),” in Underwater thresholds for onset of permanent and temporary threshold shifts (Washington, DC: NOAA Technical Memorandum NMFS-OPR-59), 167.
19
National Research Council [NRC] (2003). Ocean noise and marine mammals (Washington, DC: The National Academies Press).
20
Nehls G. Betke K. Eckelmann S. Ros M. (2007). “Assessment and costs of potential engineering solutions for the mitigation of the impacts of underwater noise arising from the construction of offshore windfarms,” in COWRIE ENG-14-2007 (Windsor, CT: COWRIE Ltd).
21
Nowacek D. P. Thorne L. H. Johnston D. W. Tyack P. L. (2007). Responses of cetaceans to anthropogenic noise. Mamm. Rev.37, 81–115. doi: 10.1111/j.1365-2907.2007.00104.x
22
Oliveira T. C. A. Lin Y. T. Porter M. B. (2021). Underwater sound propagation modeling in a complex shallow water environment. Front. Mar. Sci.8. doi: 10.3389/fmars.2021.751327
23
Pirotta E. Booth C. G. Costa D. P. Fleishman E. Kraus S. D. Lusseau D. et al . (2018). Understanding the population consequences of disturbance. Ecol. Evol.8, 9934–9946. doi: 10.1002/ece3.4458
24
Popper A. N. Hawkins A. (2016). The effects of noise on aquatic life II (New York, USA: Springer).
25
Popper A. N. Hawkins A. (2019). An overview of fish bioacoustics and the impacts of anthropogenic sounds on fishes. J. Fish Biol.94, 692–713. doi: 10.1111/jfb.13948
26
Popper A. N. Hawkins A. D. Fay R. R. Mann D. A. Bartol S. Carlson T. J. et al . (2014). ASA S3/SC1. 4 TR-2014 sound exposure guidelines for fishes and Sea turtles: A technical report prepared by ANSI-accredited standards committee S3/SC1 and registered with ANSI (New York, USA: Springer).
27
Popper A. N. Hice-Dunton L. Jenkins E. Higgs D. M. Krebs J. Mooney A. (2022). Offshore wind energy development: Research priorities for sound and vibration effects on fishes and aquatic invertebrates. J. Acoust. Soc. Am.151, 205–215. doi: 10.1121/10.0009237
28
Ramcharitar J. Gannon D. P. Popper A. N. (2006). Bioacoustics of fishes of the family sciaenidae (croakers and drums). T. Am. Fish Soc.135, 1409–1431. doi: 10.1577/T05-207.1
29
Reinhall P. G. Dahl P. H. (2011). Underwater mach wave radiation from impact pile driving: theory and observation. J. Acoust. Soc. Am.130, 1209–1216. doi: 10.1121/1.3614540
30
Ren X. M. Gao D. Z. Yao Y. L. Yang F. Liu J. F. Xie F. J. (2007). Occurrence and characteristic of sound in large yellow croaker (Pseudosciaena crocea). J. Dalian. Ocean Univ.22, 123–128. doi: 10.3969/j.issn.1000-9957.2007.02.009
31
Reyff J. A. (2012). “Underwater sounds from unattenuated and attenuated marine pile driving,” in The effects of noise on aquatic life. Eds. PopperA. N.HawkinsA. D. (LLC New York: Springer Science + Business Media), p 439–p 444.
32
Southall B. L. Bowles A. E. Ellison W. T. Finneran J. J. Gentry R. L. Greene C. R. et al . (2007). Marine mammal noise exposure criteria: initial scientific recommendations. Aquat. Mamm.33, 411–414. doi: 10.1578/AM.33.4.2007.411
33
Southall B. L. Finneran J. J. Reichmuth C. Nachtigall P. E. Ketten D. R. Bowles A. E. et al . (2019). Marine mammal noise exposure criteria: updated scientific recommendations for residual hearing effects. Aquat. Mamm.45, 125–232. doi: 10.1578/AM.45.2.2019.125
34
Stadler J. H. Woodbury D. P. (2009). ). the effects of noise on aquatic life. inter-noise 2009Inter-Noise:Ottawa, Ontario, Canada.
35
Urick R. J. (1983). Principles of underwater sound. 3rd edition (USA: McGraw-Hill Education).
36
Wang Z. T. Wu Y. P. Duan G. Q. Cao H. J. Liu J. C. Wang K. X. et al . (2014). Assessing the underwater acoustics of the world's largest vibration hammer (OCTA-KONG) and its potential effects on the indo-pacific humpbacked dolphin (Sousa chinensis). PloS One9, e110590. doi: 10.1371/journal.pone.0110590
37
Wang R. W. Xu X. M. Zou Z. G. Zhou Y. L. (2017). “Prediction of underwater blasting safe range for Large yellow croaker (Pseudosciaena crocea),” in 2017 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xiamen, China. doi: 10.1109/ICSPCC.2017.8242546
38
Webb J. F. Fay R. R. Popper A. N. (Eds.) (2008). Fish bioacoustics (New York, USA: Springer).
39
Wyatt R. (2008). Joint industry programme on sound and marine life review of existing data on underwater sounds produced by the oil and gas industry (Great Torrington: Seiche Measurements Ltd).
40
Zhang X. H. Tao Y. Zhou Y. L. Tang L. G. Liu M. Xu X. M. (2021). Acoustic properties of the otolith of the Large yellow croaker Larimichthys crocea (Perciformes: Sciaenidae). Zool. Stud.60, e64. doi: 10.6620/ZS.2021.60–64
41
Zhou Y. L. Xu X. M. Zhang X. ,. H. Huang L. F. Xiao F. G. He Y. W. (2022). Vocalization behavior differs across reproductive stages in cultured large yellow croaker Larimichthys crocea (Perciformes: Sciaenidae). Aquaculture556, 738267. doi: 10.1016/j.aquaculture.2022.738267
Summary
Keywords
underwater noise, impact pile driving, vibratory pile driving, sound characteristics, behavioral response, large yellow croaker (Pseudosciaena crocea)
Citation
Niu F, Xie J, Zhang X, Xue R, Chen B, Liu Z and Yang Y (2023) Assessing differences in acoustic characteristics from impact and vibratory pile installation and their potential effects on the large yellow croaker (Pseudosciaena crocea). Front. Mar. Sci. 10:1106980. doi: 10.3389/fmars.2023.1106980
Received
24 November 2022
Accepted
16 January 2023
Published
03 February 2023
Volume
10 - 2023
Edited by
Rui He, Hohai University, China
Reviewed by
Michael L. Fine, Virginia Commonwealth University, United States; Zhongchang Song, Xiamen University, China
Updates
Copyright
© 2023 Niu, Xie, Zhang, Xue, Chen, Liu and Yang.
This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Yanming Yang, yangyanming@tio.org.cn
This article was submitted to Ocean Observation, a section of the journal Frontiers in Marine Science
Disclaimer
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.