 Tian Zhang1,2
Tian Zhang1,2 Yongquan Zhou
Yongquan Zhou- 1College of Artificial Intelligence, Guangxi University for Nationalities, Nanning, China
- 2Guangxi Key Laboratories of Hybrid Computation and IC Design Analysis, Nanning, China
- 3Department of Science and Technology Teaching, China University of Political Science and Law, Beijing, China
- 4College of Electronic Information and Automation, Civil Aviation University of China, Tianjin, China
Mayfly algorithm (MA) is a bioinspired algorithm based on population proposed in recent years and has been applied to many engineering problems successfully. However, it has too many parameters, which makes it difficult to set and adjust a set of appropriate parameters for different problems. In order to avoid adjusting parameters, a bioinspired bare bones mayfly algorithm (BBMA) is proposed. The BBMA adopts Gaussian distribution and Lévy flight, which improves the convergence speed and accuracy of the algorithm and makes better exploration and exploitation of the search region. The minimum spanning tree (MST) problem is a classic combinatorial optimization problem. This study provides a mathematical model for solving a variant of the MST problem, in which all points and solutions are on a sphere. Finally, the BBMA is used to solve the large-scale spherical MST problems. By comparing and analyzing the results of BBMA and other swarm intelligence algorithms in sixteen scales, the experimental results illustrate that the proposed algorithm is superior to other algorithms for the MST problems on a sphere.
Introduction
Tree is a connected graph with simple structure which contains no loops and widely applied in graph theory (Diestel, 2000). The minimum spanning tree (MST) problem is a practical, well-known, and widely studied problem in the field of combinatorial optimization (Graham and Hell, 1985). This problem has a long history, which was first put forward by Borüvka in 1926. Many engineering problems are solved based on MST (Bo Jiang, 2009), such as communications network design (Hsinghua et al., 2001), the construction of urban roads, the shortest path (Beardwood et al., 1959), distribution network planning, and pavement crack detection. There are some classical algorithms for solving MST, such as the Prim algorithm (Bo Jiang, 2009) and Kruskal algorithm (Joseph, 1956). They all belong to greedy algorithms, and generally, only one minimum spanning tree can be obtained. However, in practical application, it is usually necessary to find a group of minimum or subminimum spanning trees as the basis for scheme evaluation or selection. Therefore, finding an effective algorithm to solve MST problems is still a frontier topic. In recent years, a large number of bioinspired algorithms have been proposed, such as the marine predator algorithm (Faramarzi et al., 2020), chimp optimization algorithm (Khishe and Mosavi, 2020), arithmetic optimization algorithm (Abualigah et al., 2021), bald eagle search algorithm (Alsattar et al., 2020), Harris hawks optimization algorithm (Heidari et al., 2019), squirrel search algorithm (Jain et al., 2018), pathfinder algorithm (Yapici and Cetinkaya, 2019), equilibrium optimizer (Faramarzi et al., 2019). The swarm intelligence algorithm has been widely used in various optimization problems and achieved good results, for example, path planning problems solved by the central force optimization algorithm (Chen et al., 2016), teaching–learning-based optimization algorithm (Majumder et al., 2021), water wave optimization algorithm (Yan et al., 2021), chicken swarm optimization algorithm (Liang et al., 2020), etc. Location problems are solved by the genetic algorithm (Li et al., 2021), particle swarm optimization (Yue et al., 2019), flower pollination algorithm (Singh and Mittal, 2021), etc. Also, the design of a reconfigurable antenna array is solved by the differential evolution algorithm (Li and Yin, 2011a), biogeography-based optimization (Li and Yin, 2011b), etc. In fact, the meta-heuristic algorithm can generate a set of minimum or subminimum spanning trees rather than one minimum spanning tree. The genetic algorithm (Zhou et al., 1996), artificial bee colony algorithm (Singh, 2009), ant colony optimization (Neumann and Witt, 2007), tabu search algorithm (Katagiri et al., 2012), and simulated annealing algorithm have been used for solving the MST problem.
For the MST problem, we usually calculate it in two-dimensional space, but it is of practical significance to study MST in three-dimensional space. For example, sockets are connected with wires in cuboid rooms, and roads on hills and mountains are planned. Also, as we all know, the surface of the Earth where we live is very close to a sphere. In many research fields, atoms, molecules, and proteins are represented as spheres, and foods in life, such as eggs, seeds, onions, and pumpkins, are close to spheres. Some buildings, glass, and plastics are made into spheres. Similar to the traveling salesman problem (TSP), it is also an NP-hard problem. Now scholars have applied the cuckoo search algorithm (Ouyang et al., 2013), glowworm swarm optimization (Chen et al., 2017), and flower pollination algorithm (Zhou et al., 2019) to solve the spherical TSP. Thus, it is of essence crucial to study the MST on a three-dimensional sphere. Bi and Zhou have applied the improved artificial electric field algorithm to the spherical MST problem (Bi et al., 2021). In this article, we will further study the cases of more nodes on the sphere.
The mayfly algorithm (MA) proposed by Konstantinos Zervoudakis and Stelios Tsafarakis (2020) is a population-based intelligent optimization bioinspired algorithm inspired by the flight and mating behavior of adult mayflies. Due to its high calculation accuracy and simple structure, researchers employed it to address problems of numerous disciplines. Guo and Kittisak Jermsittiparsert used improved MA to optimize the component size of high-temperature PEMFC-powered CCHP (Guo et al., 2021). Liu and Jiang proposed a multiobjective MA for a short-term wind speed forecasting system based on optimal sub-model selection (Liu et al., 2021a). Trinav Bhattacharyya and Bitanu Chatterjee combined MA with harmony search algorithm to solve the feature selection problem (Bhattacharyya et al., 2020). Liu and Chai used energy spectrum statistics and improved MA for bearing fault diagnosis (Liu et al., 2021b). Chen and Song proposed the balanced MA to optimize the configuration of electric vehicle charging stations on the distribution system (Chen et al., 2021). MohamedAbd and ElazizaS. Senthilraja used MA to predict the performance of a solar photovoltaic collector and electrolytic hydrogen production system (AbdElaziz et al., 2021). To obtain a group of more perfect minimum spanning trees or subminimum spanning trees on a sphere in finite time, a bare bones mayfly algorithm (BBMA) is proposed to solve spherical MST problems. By simplifying the algorithm parameters and using the statistical update method, the fast convergence and solution accuracy of the proposed algorithm are better than before, and it shows superior ability in solving large-scale problems.
The rest of this article is organized as follows: Related Work describes the related work and basic mayfly algorithm. The Proposed BBMA for Large-Scale Spherical MST introduces the proposed bare bones mayfly algorithm for spherical MST. Comparison and analysis of results evaluated by BBMA and other algorithms are given in Experimental Results and Discussion. This article is concluded in Conclusion and Future Work.
Related Work
Spherical Minimum Spanning Tree Mathematical Model
A semicircle takes its diameter as its axis of rotation, and the surface formed by rotation is called a sphere. The radius of the semicircle is the radius of the sphere. In this study, the coordinate origin (Figures 1A,B ) is set as the center of the sphere. The equation of a sphere with radius
where
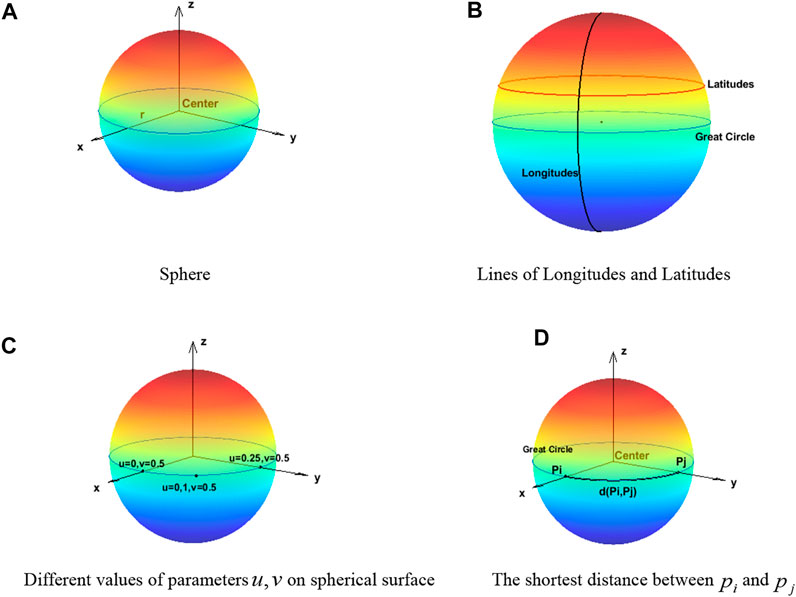
FIGURE 1. Related definitions on the sphere. (A) Sphere. (B) Lines of longitudes and latitudes. (C) Different values of parameters
Representation of Points on a Sphere
The coordinate position on the sphere can be expressed by the following formula (Hearn and Pauline Baker, 2004):
Each coordinate is represented by a function of the surface parameters
where parameters
Geodesics Between Point Pairs on a Unit Sphere
The circle of a sphere cut by the plane passing through the center of the sphere is called a great circle (Wikipedia, 2012). On the sphere, the length of the shortest connecting line between two points is the length of an inferior arc between the two points of the great circle passing through the two points. We call this arc length the geodesic (Lomnitz, 1995).
The geodesic between two points
where
Also, the shortest distance formula is
The distance from point
where
Spherical Minimum Spanning Tree Mathematical Model
For the two-dimensional MST problem,
where the constraint condition Eq. 12 ensures that the last generated graph is a spanning tree. Also, constraint condition Eq. 13 ensures that it is not a circle in the process of solving the minimum spanning tree problem.
As for a 3D spherical minimum spanning tree problem, a finite set of nodes
Similarly, constraint condition Eqs 12–14 are applied to Eq. 15.
Mayfly Algorithm
Mayfly algorithm is a new swarm intelligence bioinspired algorithm proposed in 2020. Its inspiration comes from the flying and mating behavior of male and female mayflies in nature. The algorithm can be considered as a modification of particle swarm optimization (PSO) (Kennedy and Eberhart, 1995), genetic algorithm (GA) (Goldberg, 1989), and firefly algorithm (FA) (Yang, 2009). At present, researchers have applied MA to many engineering problems.
Mayflies are insects that live in water when they are young. The feeding ability will be lost, and they only mate and reproduce when they grow up. In order to attract females, most adult male mayflies gather a few meters above the water to perform a nuptial dance. Then, female mayflies fly into these swarms to mate with male mayflies. After mating, the females lay their eggs on the water, and the mated mayflies will die.
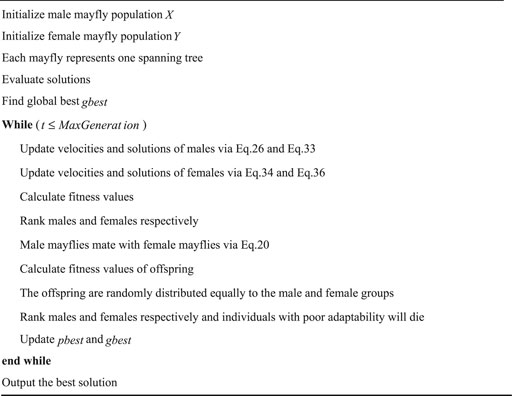
In MA, the two idealized rules should be followed. First, after mayflies are born, they are regarded as adults. Second, the mated mayflies which have stronger ability to adapt to the environment can continue to survive. The algorithm works as follows. First, male and female populations are randomly generated. Each mayfly in the search space is regarded as a candidate solution represented by a
Movement of Male Mayflies
The gathering of male mayflies in a swarm is always a few meters above water for performing the nuptial dance. The position of a male mayfly is updated as follows:
where
where
Movement of Female Mayflies
The female mayflies move toward the males for breeding. The position of a female mayfly is updated as follows:
where
where
Mating of Mayflies
The mating rules are the same as the way females are attracted by males. The best female breeds with the best male, the second best female with the second best male, and so on. The positions of two offspring are generated by the arithmetic weighted sum of the positions of parents as follows:
where
After mating, the offspring are mixed with male and female parents. Then, the fitness values are sorted. The mayflies with low adaptability will die, and those with high adaptability will live for the next iteration. Algorithm 1 shows the pseudocode of MA.
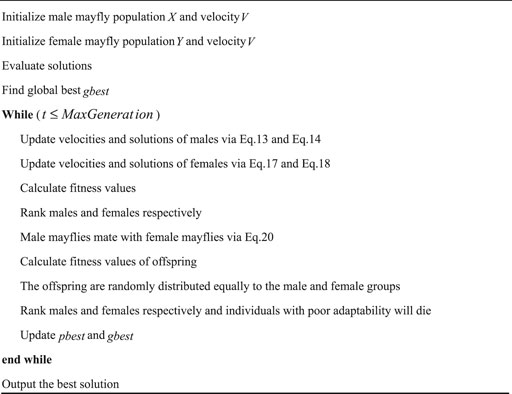
Algorithm 1. Mayfly algorithm.
The Proposed BBMA for Large-Scale Spherical MST
MST Based on Prüfer Coding
A coding method for marking rootless trees is called Prüfer coding. The initial population generated by this coding method will not produce infeasible solutions after being improved. Prüfer coding is needed to solve the spherical MST. Its idea comes from Cayley’s theorem, which means that there are
Step 1: node
Step 2: the node
Step 3: node
Step 4: this is repeated until only one edge is left
Through the abovementioned steps, we can get a Prüfer sequence of tree
Code Design
We assume that there are
Suppose an individual is represented by
The Prüfer sequence obtained by rounding
According to
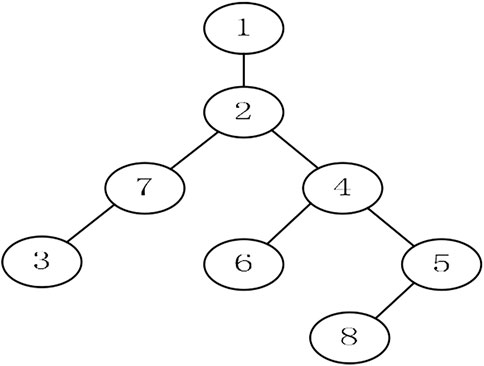
FIGURE 2. Spanning tree.
The pseudo code of decoding the Prüfer sequence into a tree is shown in Algorithm 2.
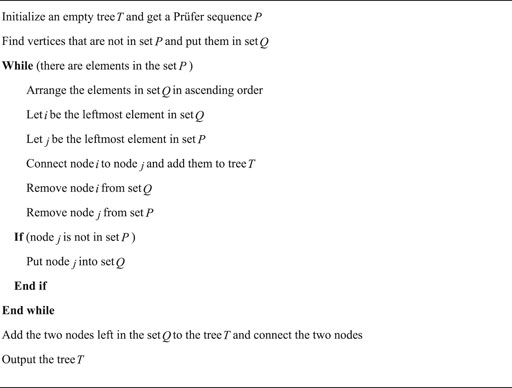
Algorithm 2. Decoding the Prüfer sequence into a tree.
The BBMA Algorithm
The basic MA has the problem of many initial parameters which have a great impact on the results. Besides, the accuracy of MA is not high enough due to lack of exploitation ability. Bare bones mayfly algorithm avoids the influence of parameters by cancelling the velocity (Ning and Wang, 2020; Song et al., 2020), and individual position is directly obtained by random sampling obeying Gaussian distribution like bare bones PSO (Kennedy, 2003). In order to enhance the exploitation ability and help the algorithm escape from the local optimal solution, BBMA uses Lévy flight to perform the nuptial dance of the optimal male and the random flight of the excellent female (Nezamivand et al., 2018). In addition, individuals crossing the border are pulled back into the search space instead of the method of placing cross-border individuals on the boundary so that it reduces the waste of search space (Wang et al., 2016). The main steps of BBMA are described as follows.
Movement of Male Mayflies
Male mayflies can be renewed in two ways as before. First, for individuals who are not the best, the Gaussian distribution based on the global optimal position and individual historical optimal position is used to calculate the position. In order to keep a balance between the diversity and convergence of algorithm, a disturbance which changes adaptively based on the diversity of the population and the convergence degree of the current individual is added (Zhang et al., 2014). The new update strategy is described as follows:
where
We know that the population is scattered in the early stage of evolution, so
As for the second individual update method, if the individual is the global optimal solution, Lévy flight is adopted. The small step size of Lévy flight improves the exploitation ability of the algorithm, and the less long step increases the ability of avoiding getting stuck in a local optimal value (Dinkar and Deep, 2018; Ren et al., 2021). By using Lévy flight, the overall performance of BBMA in solving large-scale problems has been greatly enhanced. In fact, Lévy flight is a random walk, which follows the Lévy distribution of the following formulas:
where
By using Lévy flight to search the solution space, the global exploration ability and local exploitation ability of the algorithm are better balanced.
Movement of Female Mayflies
Female mayflies can be renewed in two ways as before. Firstly, for individuals who are worse than their corresponding male mayflies, the Gaussian distribution based on the current female mayfly’s position and its corresponding male mayfly’s position is used to calculate the position. The new update strategy is described as follows:
where
As for the second individual update method, if the female mayfly is better than its corresponding male mayfly, the excellent female mayfly, like the best male mayfly, should use the strategy of Lévy flight which will make the algorithm get rid of the local optimum (Barshandeh and Haghzadeh, 2020). For excellent female mayflies, the update formula is as follows:
Both Gaussian distribution and Lévy distribution are statistical random distribution. The distribution of the former is regular, and the distribution of the latter is irregular. Their cooperation can prevent the lack of diversity of the algorithm and improve the convergence speed.
Mating of Mayflies
The mating process is the same as the basic MA as shown in Eq. 23. After mating, the offspring are mixed with parents. Then, the mayflies with low adaptability will die, and those with high adaptability will live for the next iteration.
Handling Cross-Border Mayflies
In the early stage of population evolution, the distance between the historical optimal position and the global optimal position of different individuals is far away, and the standard deviation
where
The concrete implementation steps of the bare bones mayfly algorithm for spherical MST are as follows.
Algorithm 3. The BBMA for spherical MST.
Experimental Results and Discussion
A large number of cases with different number of points are used to test the ability of BBMA in solving MST problems. All experiments are carried out on a sphere with
Experimental Setup
All of the experiments are compiled in MATLAB R2019a. System specification: an Intel Core i3-6100 processor, 8 GB RAM is used. In this work, we set the population size of all algorithms to 30, and each algorithm iterates 300 generations. BBMA is compared with the mayfly algorithm (MA), artificial electric field algorithm (AEFA) (Anita and Yadav, 2019), GA (Holland, 1992), PSO (Kennedy and Eberhart, 1995), imperialist competitive algorithm (ICA) (Atashpaz-Gargari and Lucas, 2008), seagull optimization algorithm (SOA) (Dhiman and Kumar, 2019), grasshopper optimization algorithm (GOA) (Storn and Price, 1997), grey wolf optimization (GWO) (Li et al., 2014), slime moth algorithm (SMA) (Saremi et al., 2017), differential evolution (DE) (Mirjalili et al., 2014), and animal migration optimization (AMO) (Li et al., 2020) in the best value, worst value, mean value, and standard deviation. In addition, in order to clearly prove the effectiveness of BBMA, the convergence curves, ANOVA test, fitness values for 30 runs, running time, and Wilcoxon rank-sum non-parametric statistical test (Derrac et al., 2011; Gibbons and Chakraborti, 2011) are also compared. Also, the minimum spanning tree is showed in spheres. The control parameters of each algorithm are as follows (Bi et al., 2021):
• BBMA: no parameters
• MA: positive attraction constants
• AEFA: Coulomb’s constant
• PSO: inertia weight
• ICA: selection pressure is 1, assimilation coefficient is 2, revolution probability is 0.5, revolution rate is 0.1, and colony mean cost coefficient is 0.1 (Atashpaz-Gargari and Lucas, 2008)
• GA: crossover probability is 0.8, and mutation probability is 0.8 (Holland, 1992)
• GOA: intensity of attraction
• GWO: convergence factor
• SOA:
• SMA: foraging success probability
• DE: scaling factor
• AMO: no parameters (Li et al., 2020)
Comparison of Algorithms in Low-Dimensional Cases
Cases with 25, 50, 75, and 100 points are used to compare the performance of algorithms mentioned above, and the results of 30 runs are obtained. Table 1 gives the best value, worst value, mean value, standard deviation, and the ranking of mean value. The bold data indicate that it is the best value of the twelve algorithms. Figure 3 shows the convergence curves in these four situations, Figure 4 shows the ANOVA test results, Figure 5 shows the fitness values for 30 runs, and Figure 12A–D show the minimum spanning tree for four low-dimensional cases, where “ROOT” is the root of the minimum spanning tree. Figure 13A shows the average running time of 30 runs of 12 algorithms in four dimensions. Finally, the Wilcoxon rank-sum non-parametric test results in low-dimensional cases are shown in Table 2.
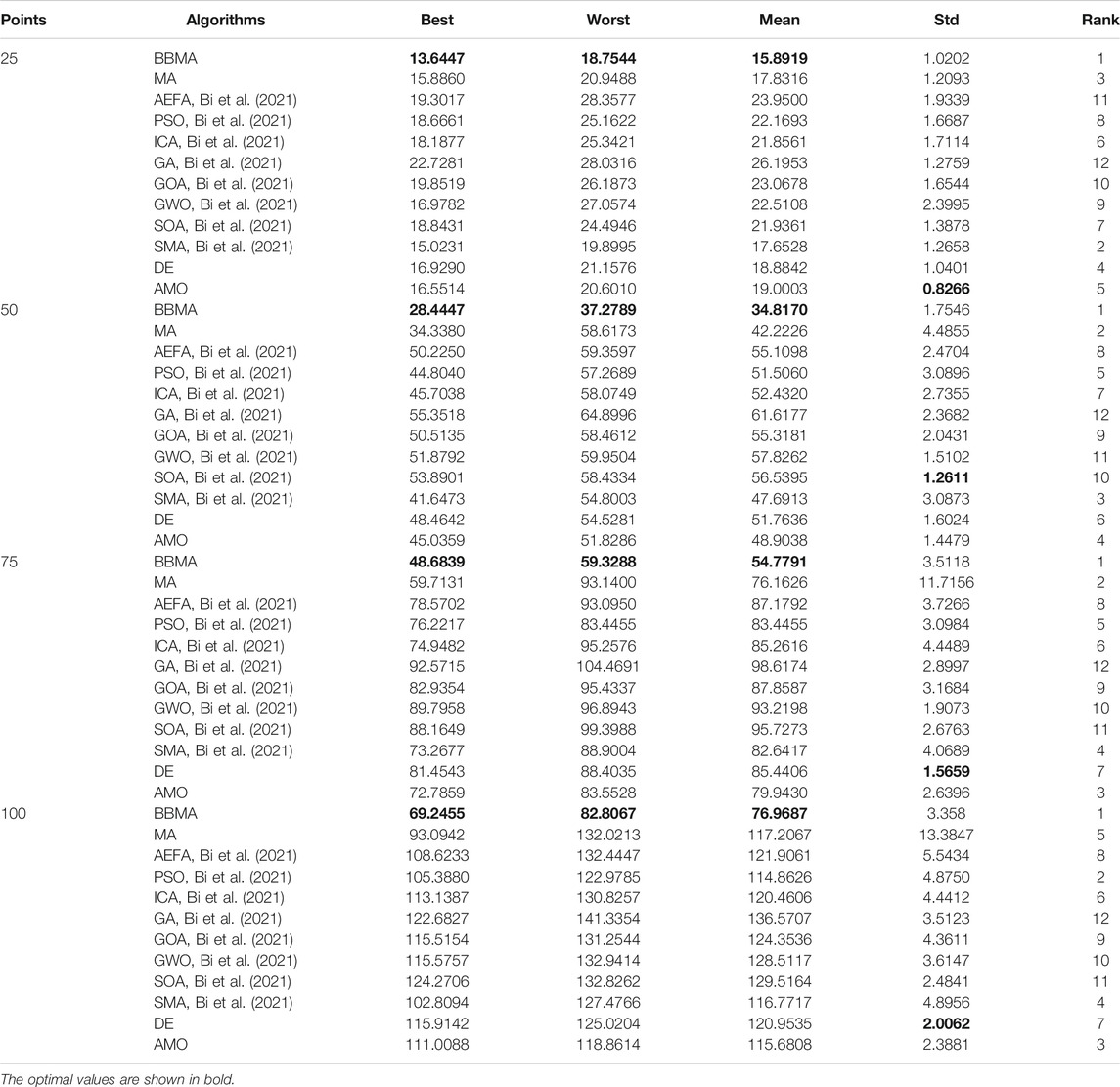
TABLE 1. Experimental results for the twelve algorithms for 25, 50, 75, and 100 points.
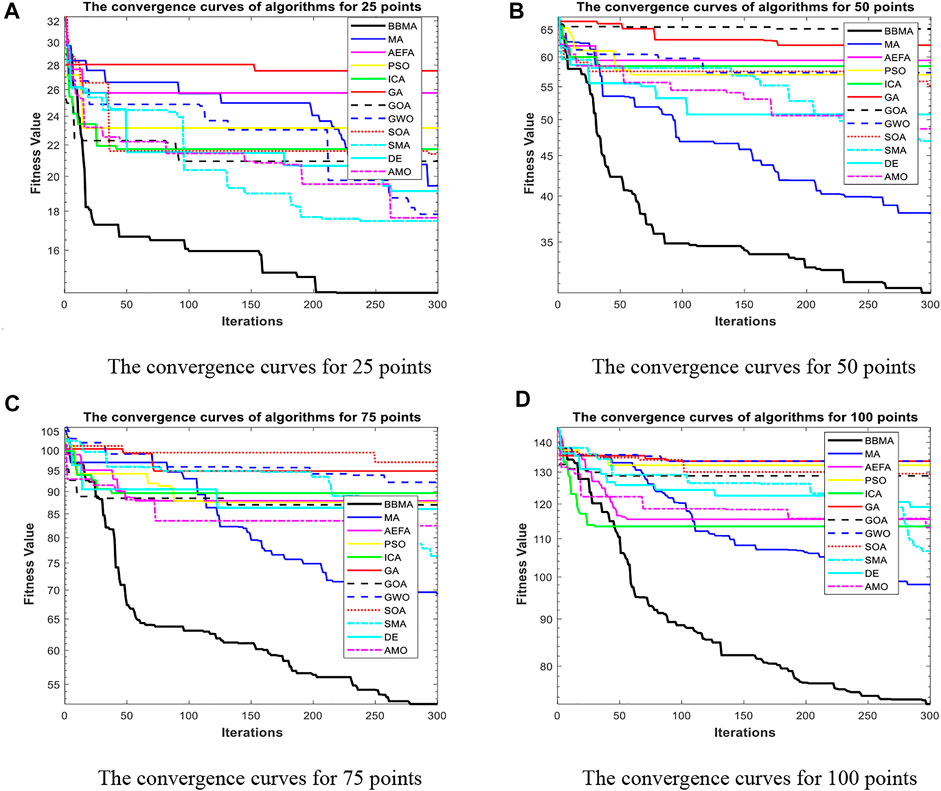
FIGURE 3. The convergence curves for low dimensions. (A) The convergence curves for 25 points. (B) The convergence curves for 50 points. (C)The convergence curves for 75 points. (D) The convergence curves for 100 points.
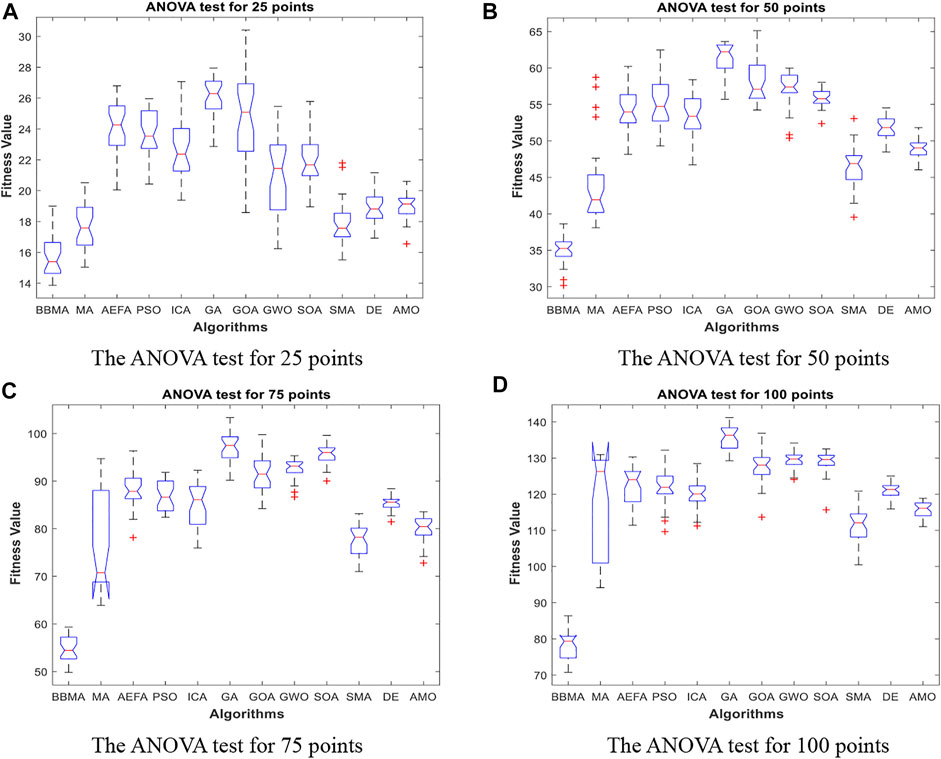
FIGURE 4. The ANOVA test for low dimensions. (A) The ANOVA test for 25 points. (B) The ANOVA test for 50 points. (C) The ANOVA test for 75 points. (D) The ANOVA test for 100 points.
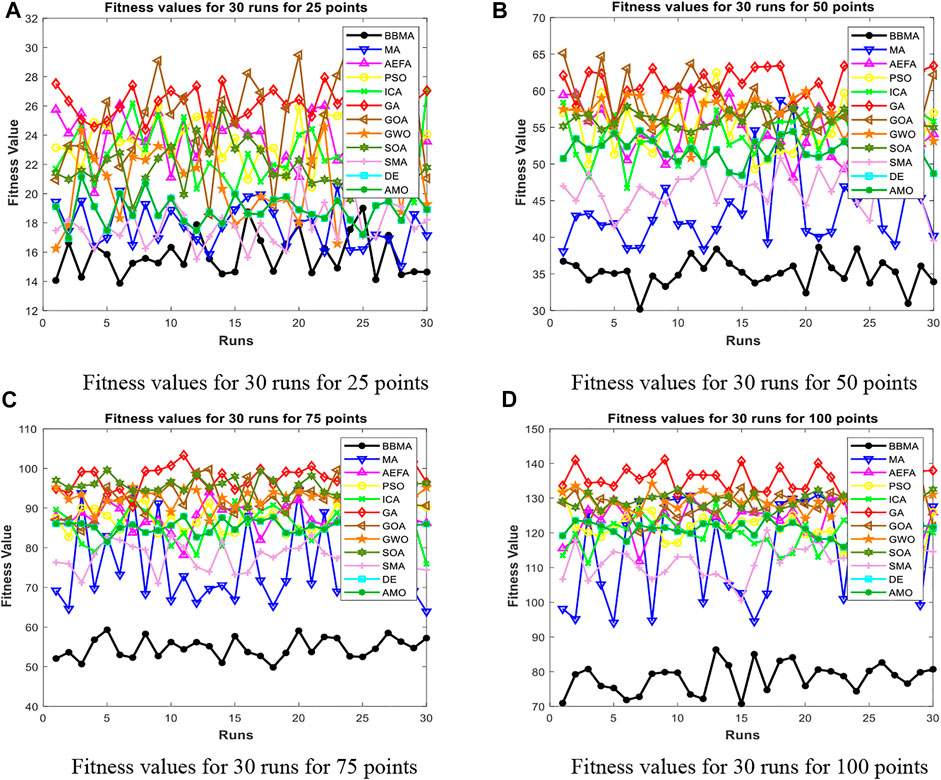
FIGURE 5. Fitness values for low dimensions. (A) Fitness values for 30 runs for 25 points. (B) Fitness values for 30 runs for 50 points. (C) Fitness values for 30 runs for 75 points. (D) Fitness values for 30 runs for 100 points.

TABLE 2. Wilcoxon rank-sum test results in low dimensions.
The comparison results for 25 points are shown in Table 1. BBMA performs best in the best, worst, and mean value, but its standard deviation is 1.0202 which is worse than that of AMO, while the algorithm with the worst performance is GA. Figure 3A is the convergence curves of all algorithms; obviously, BBMA has the fastest convergence speed of twelve mentioned algorithms. As can be seen from Figure 4A, BBMA has the highest stability, and GWO is the worst. Figure 5A shows that, among the fitness values of 30 runs, BBMA is better than other algorithms in most cases, but AMO is three times better than BBMA, SMA is three times better than it, and MA is six times better than it. Figure 12A shows the minimum spanning tree for 25 points.
The comparison results of twelve algorithms at 50 points are shown in Table 1. It can be seen that the best value, worst value, and mean value of BBMA are the best, but the standard deviation ranks fifth, behind SOA, AMO, GWO, and DE. Figure 3B and Figure 4B show the convergence curve and analysis of variance results, respectively. By observing the convergence curve, we can clearly see that BBMA has the highest accuracy and the fastest convergence speed. Also, the result of variance analysis shows that BBMA is stable for solving this problem. The fitness values for 30 runs is shown in Figure 5B, and it can be seen that BBMA outperforms all other algorithms in 30 runs. Figure 12B shows the minimum spanning tree for 50 points.
The comparison of 75 points is shown in Table 1. BBMA is better than others in the best value, worst value, and mean value, but its standard deviation is 3.5118 which is worse than the standard deviation of PSO, GA, GOA, GWO, and SOA. Besides, GA has the worst accuracy. By observing Figure 3C, it can be noticed that both convergence accuracy and convergence speed are the highest for BBMA. As can be seen from Figure 4C, BBMA is still stable. The fitness values of 30 runs and the minimum spanning tree of 75 points can be seen in Figure 5C and Figure 12C.
The experience results for 100 points are shown in Table 1. The performance of BBMA is superior to that of others in the best, worst, and mean value. The best value of BBMA is 69.2455, and the best value of MA is 93.0942. BBMA is 25.83% better than the original algorithm. Figure 3D shows that BBMA has the highest accuracy and it still has excellent exploitation ability when other algorithms are stuck in a local optimal value. Figure 4D shows that BBMA has high stability. Figure 5D and Figure 12D show the fitness values for 30 runs and the minimum spanning tree path optimized for 100 points.
It can be seen from Figure 13A that BBMA runs the longest at each case, and GA and GWO are the two fastest algorithms. In addition to the running time, by comparing with other eleven algorithms, BBMA has the best performance in low dimensions. In addition, this study statistically tests the proposed algorithm. The Wilcoxon rank-sum non-parametric test results are shown in Table 2. BBMA is tested with others at the
Comparison of Algorithms for Medium-Dimensional Cases
In this section, BBMA and other eleven algorithms are tested in six medium-dimensional cases from 150 points, 200 points, 250 points, 300 points, 350 points, and 400 points. Table 3 records the best, worst, and mean value, standard deviation, and the ranking of the mean value. The bold data indicates that it is the best value of the twelve algorithms. Figure 6 shows the convergence curves of these six cases, and Figure 7 shows the ANOVA test results for each case. The fitness values for 30 runs are shown in Figure 8. Also, the minimum spanning tree for these cases is listed in Figure 12E–J, where “ROOT” is the root of the minimum spanning tree. In addition, Figure 13B shows the average running time of the twelve algorithms in different dimensions. Finally, the Wilcoxon rank-sum non-parametric test results in medium-dimensional cases are shown in Table 4.
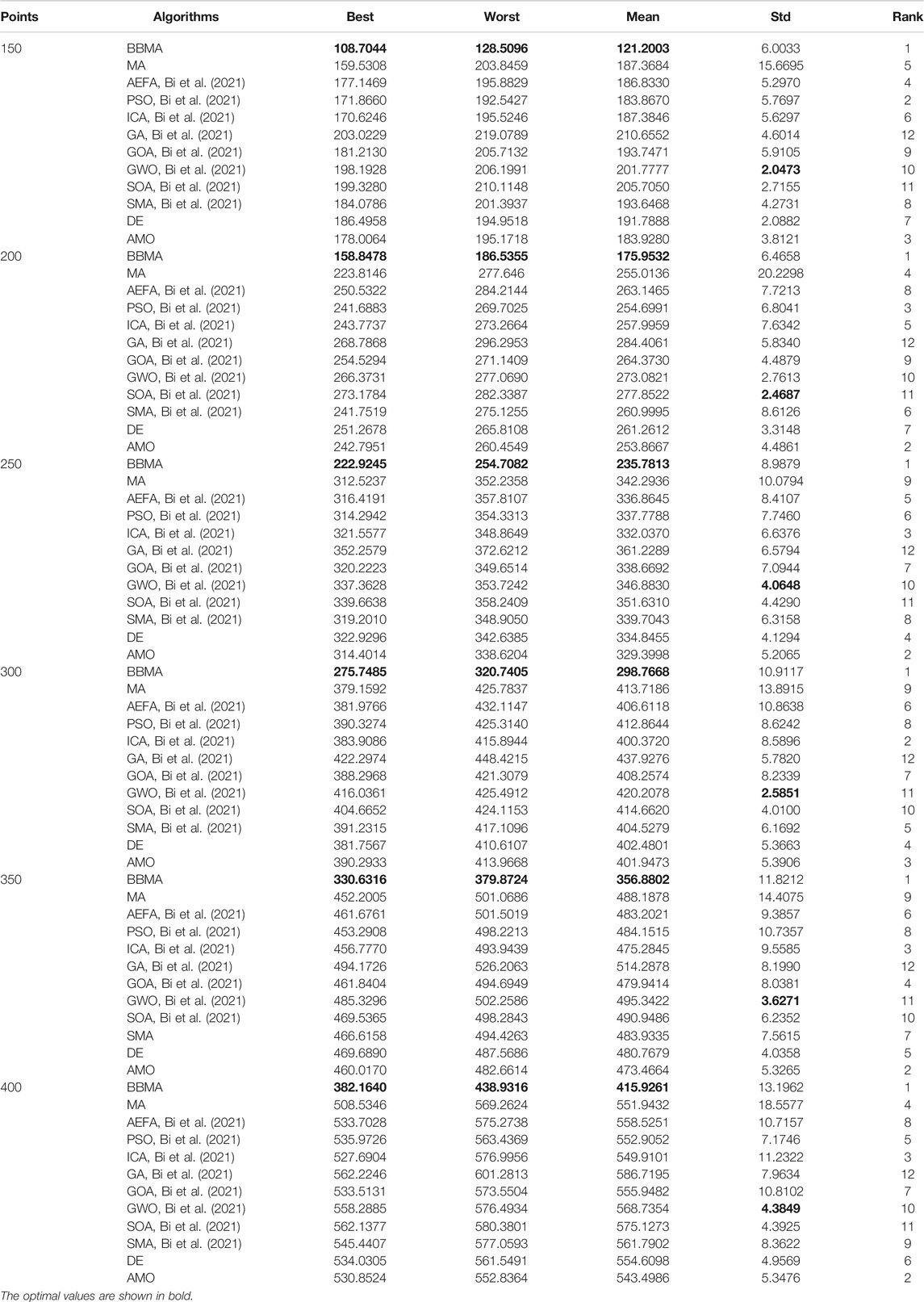
TABLE 3. Experimental results for the twelve algorithms for 150, 200, 250, 300, 350, and 400 points.
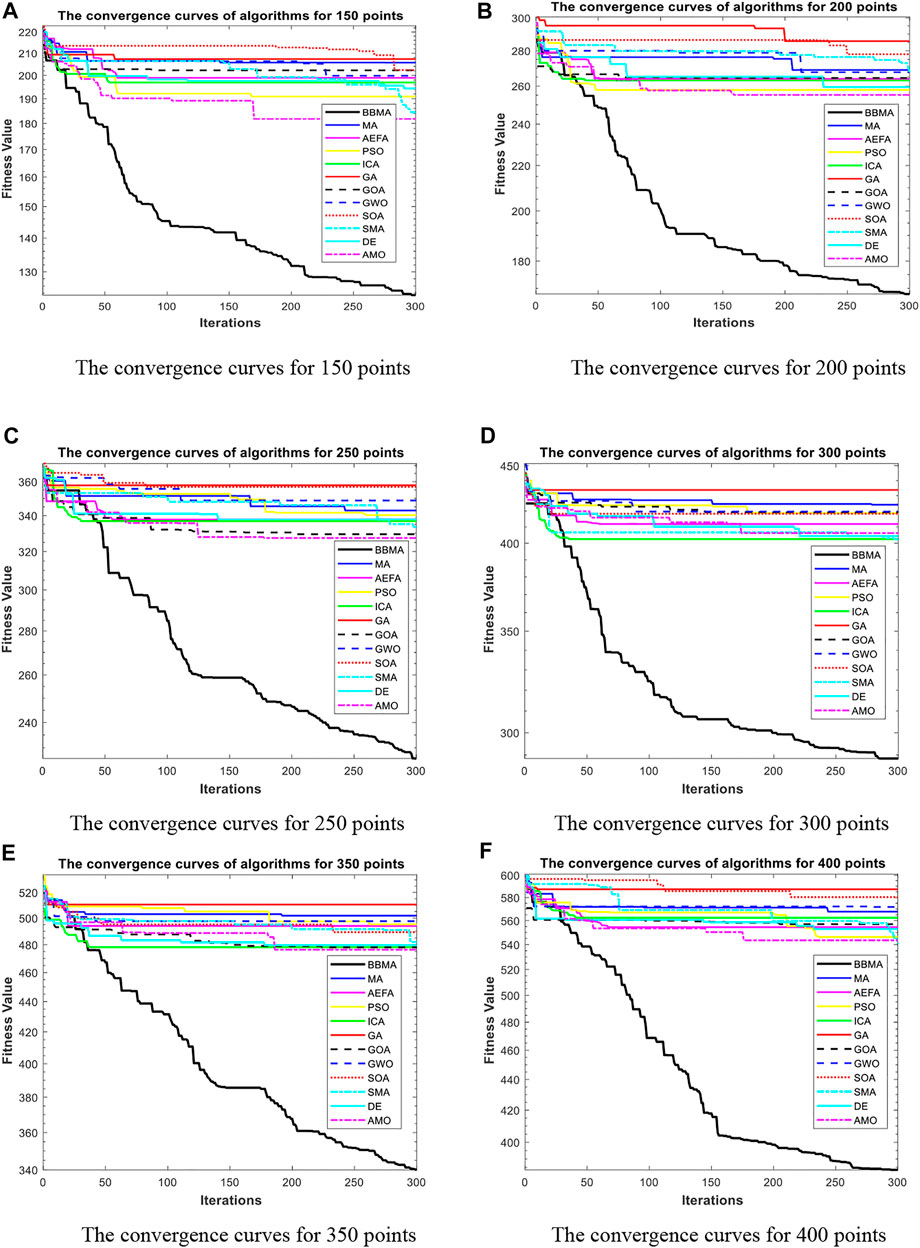
FIGURE 6. The convergence curves for medium dimensions. (A) The convergence curves for 150 points. (B) The convergence curves for 200 points. (C) The convergence curves for 250 points. (D) The convergence curves for 300 points. (E) The convergence curves for 350 points. (F) The convergence curves for 400 points.
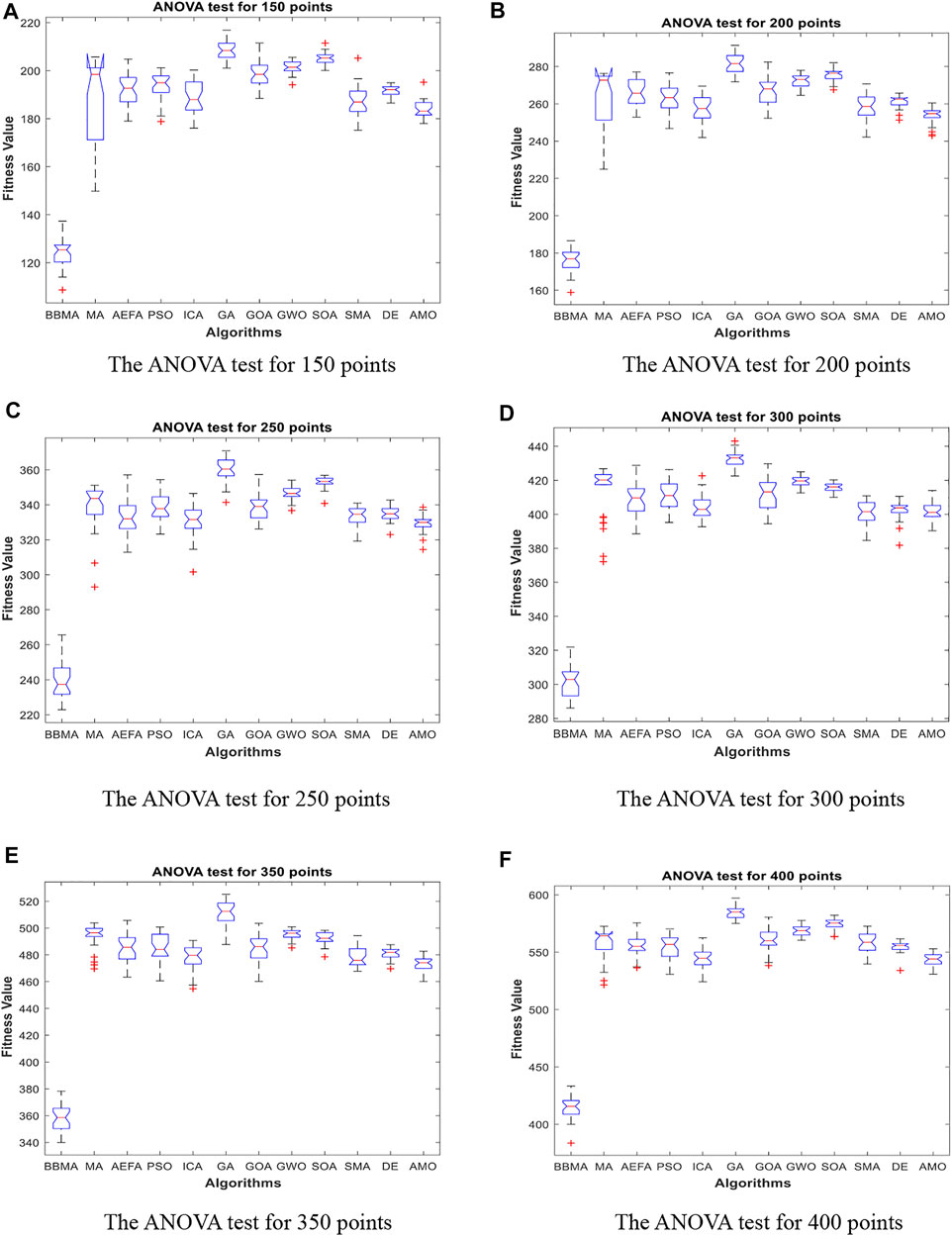
FIGURE 7. The ANOVA test for medium dimensions. (A) The ANOVA test for 150 points. (B) The ANOVA test for 200 points. (C) The ANOVA test for 250 points. (D) The ANOVA test for 300 points. (E) The ANOVA test for 350 points. (F) The ANOVA test for 400 points.
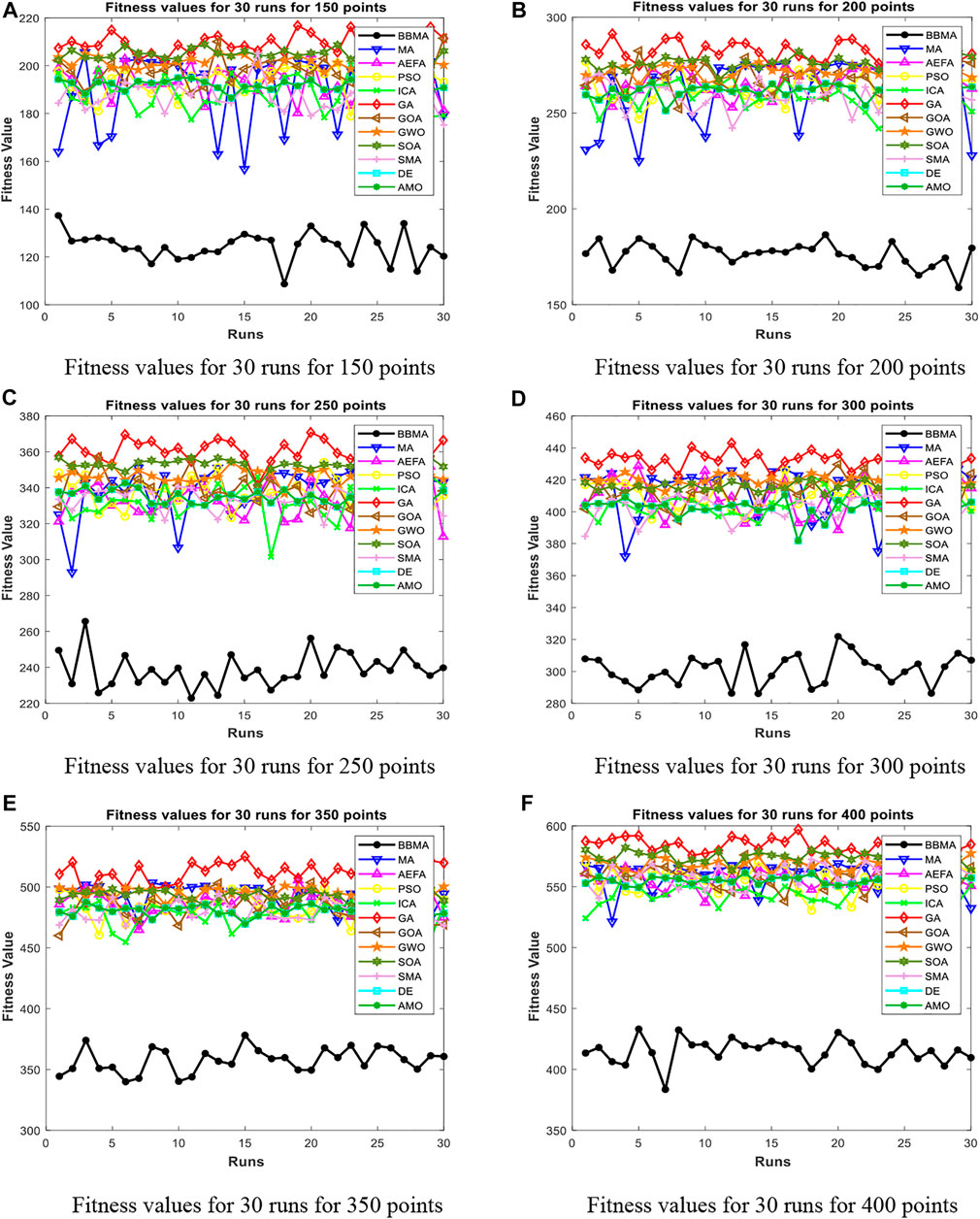
FIGURE 8. Fitness values for medium dimensions. (A) Fitness values for 30 runs for 150 points. (B) Fitness values for 30 runs for 200 points. (C) Fitness values for 30 runs for 250 points. (D) Fitness values for 30 runs for 300 points. (E) Fitness values for 30 runs for 350 points. (F) Fitness values for 30 runs for 400 points.

TABLE 4. Wilcoxon rank-sum test results in medium dimensions.
Table 3 displays the experience results of 150 points and 200 points. Also, the statistical data shown in these tables reflect the great difference between different algorithms in searching ability. We can discover that except standard deviation, the best value, worst value, and mean value of BBMA are all the optimal. Also, the performance of GA is the worst. Figures 6A,B are the convergence curves for the two cases, and it can be seen that BBMA has a faster convergence speed and accuracy and strong exploration ability. Figures 7A,B show the analysis of variance results for the two cases, and we can see that the stability of BBMA is at a relatively high level. Figures 8A,B are the fitness values in 30 runs for 150 and 200 points. The MST for the two cases can be found in Figures 12E,F.
Table 3 also shows the comparison results of different algorithms at 250 points and 300 points. BBMA is the best in the best, worst, and mean value, and GA is the worst. However, as for the standard deviation, GWO is the best at 250 and 300 points. Figures 6C,D show the convergence curves in these two cases. The convergence speed and accuracy of BBMA are much superior to others. When other algorithms fall into local optimization, it still has good performance. The results of analysis of variance can be seen in Figures 7C,D, and BBMA has high stability. Figures 8C,D show the curves of the fitness values of 12 algorithms running independently for 30 times in these two cases. The search accuracy of BBMA is much better than that of the other 11 algorithms. Figures 12G,H show the MST at 250 points and 300 points, respectively.
The situation at 350 points and 400 points is shown in Table 3. BBMA performs best in the best, worst, and mean value. Compared with the best value of MA, the accuracy of BBMA is improved by 26.88% at 350 points and 24.85% at 400 points. As shown in Figures 6E,F, with the growth of dimension, the performance of BBMA is getting better and better. Most algorithms fall into local optimal solution at generation 100, but BBMA always has strong search ability. Figures 7E,F show the analysis of variance results in two cases, Figures 8E,F show the fitness values of 30 runs, and Figures 12I,F show the MST. It can be seen that BBMA has high stability and has better ability to solve spherical MST problems in medium-dimension cases than in low-dimension cases.
In addition, Figure 13B shows that the average running time of BBMA is the longest in the six cases. Compared with other algorithms, MA, DE, and AMO also run longer. Through the abovementioned analysis, we have noticed that BBMA has the outstanding performance in the medium-dimensional cases. The Wilcoxon rank-sum test results are shown in Table 4. Similarly, the p values in the table are all less than 0.05, which proves that BBMA algorithm is better than others in medium dimensions.
Comparison of Algorithms for High-Dimensional Cases
In Comparison of Algorithms in Low-Dimensional Cases and Comparison of Algorithms for Medium-Dimensional Cases, BBMA has been compared with other 11 algorithms in low and medium dimensions. BBMA shows very superior performance. Most of the problems encountered in real life are complex and high-dimensional problems, so in this section, BBMA and MA are tested in higher dimensions where n = 500, 600, 700, 800, 900, and 1,000 (see Table 5).
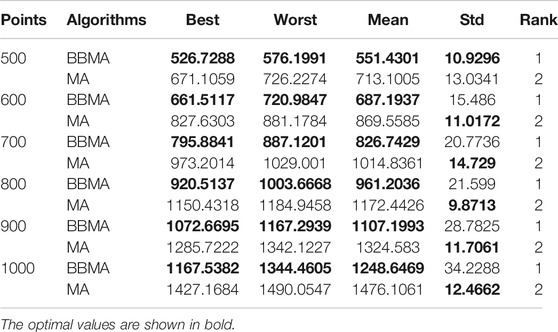
TABLE 5. Experimental results for the two algorithms for 500, 600, 700, 800, 900, and 1,000 points.
Table 5 shows the comparison results of BBMA and MA in six high-dimensional cases and also compares the best, worst, and mean value and standard deviation. The bold data indicate that it is the optimal result of the two. It can be seen that BBMA is superior to its original algorithm in the first three items in each case. The convergence curves of the two algorithms are shown in Figures 9A–F; obviously, the convergence speed and convergence accuracy of BBMA are better, and both exploration and exploitation capabilities have been greatly improved. The results of analysis of variance are shown in Figures 10A–F, and MA is more stable than BBMA. The fitness values of 30 independent operations are shown in Figures 11A–F. Also, Figures 12A–P show the MST of BBMA in different cases, where “ROOT” is the root of the MST, and the minimum spanning tree produced by BBMA is of high quality. Figure 13C is a histogram of the average running time of BBMA and MA, and we find that BBMA runs longer. Finally, Table 6 shows the results of the Wilcoxon rank-sum test in high-dimensional cases. The p values are so small that we can know that BBMA is significantly better than MA.
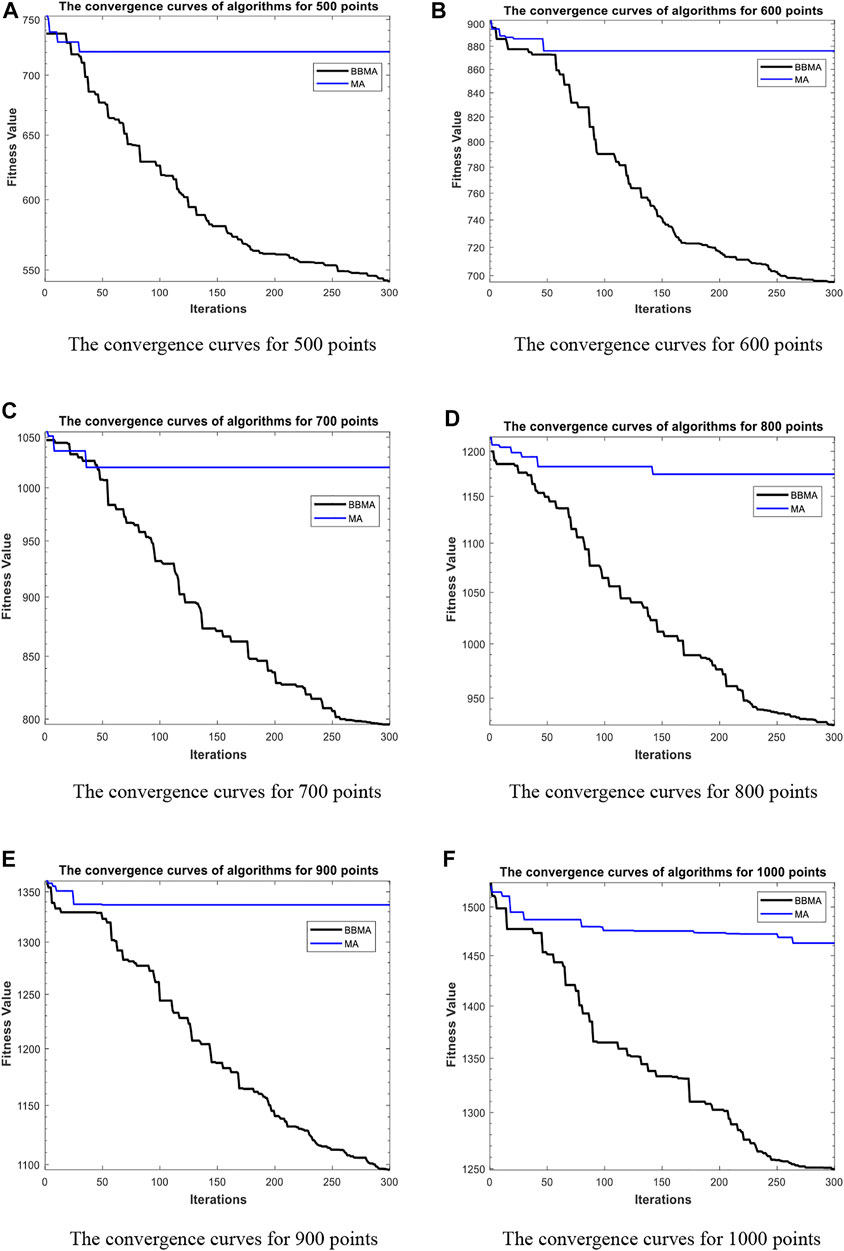
FIGURE 9. The convergence curves for high dimensions. (A) The convergence curves for 500 points. (B) The convergence curves for 600 points. (C) The convergence curves for 700 points. (D) The convergence curves for 800 points. (E) The convergence curves for 900 points. (F) The convergence curves for 1000 points.
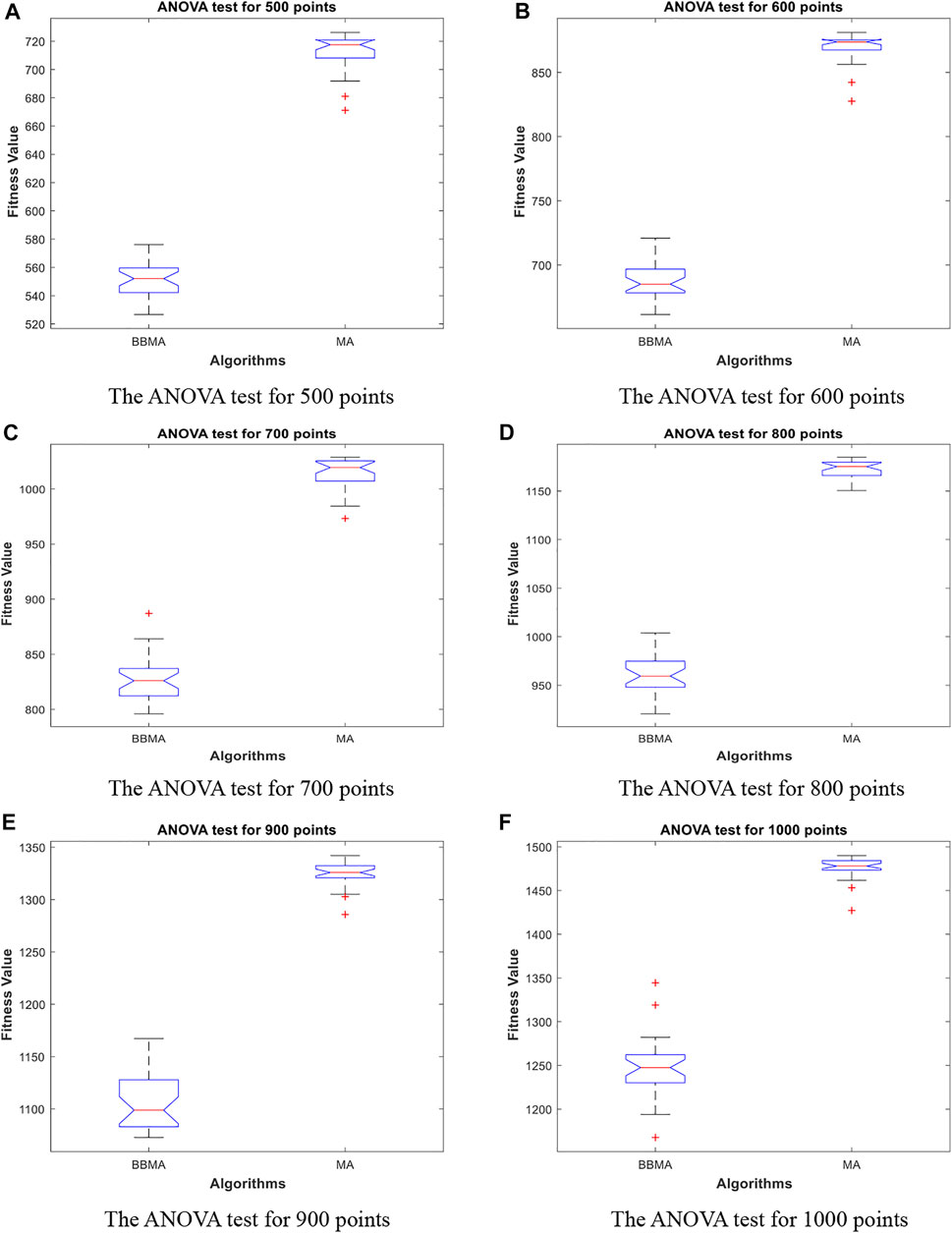
FIGURE 10. The ANOVA test for high dimensions. (A) The ANOVA test for 500 points. (B) The ANOVA test for 600 points. (C) The ANOVA test for 700 points. (D) The ANOVA test for 800 points. (E) The ANOVA test for 900 points. (F) The ANOVA test for 1000 points.
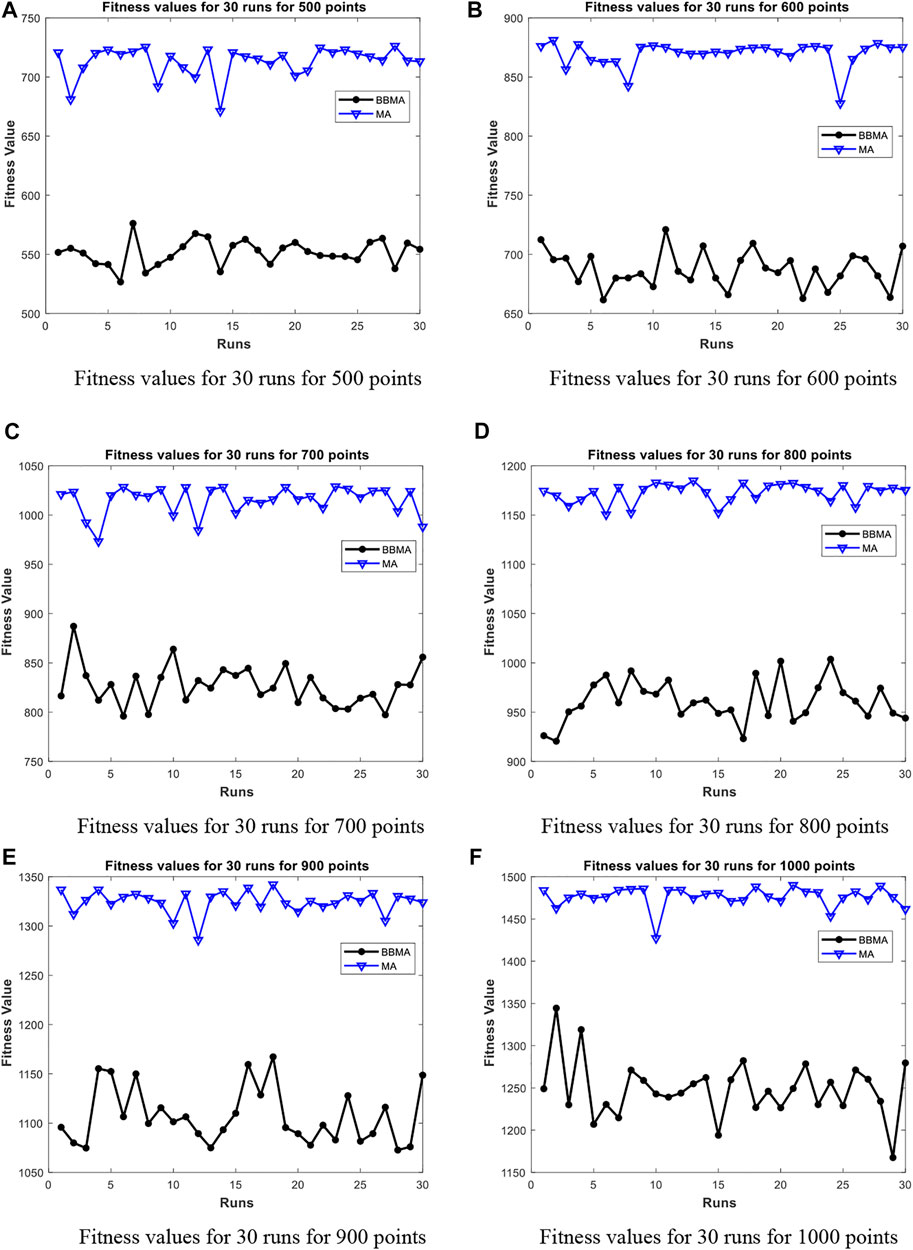
FIGURE 11. Fitness values for high dimensions. (A) Fitness values for 30 runs for 500 points. (B) Fitness values for 30 runs for 600 points. (C) Fitness values for 30 runs for 700 points. (D) Fitness values for 30 runs for 800 points. (E) Fitness values for 30 runs for 900 points. (F) Fitness values for 30 runs for 1000 points.
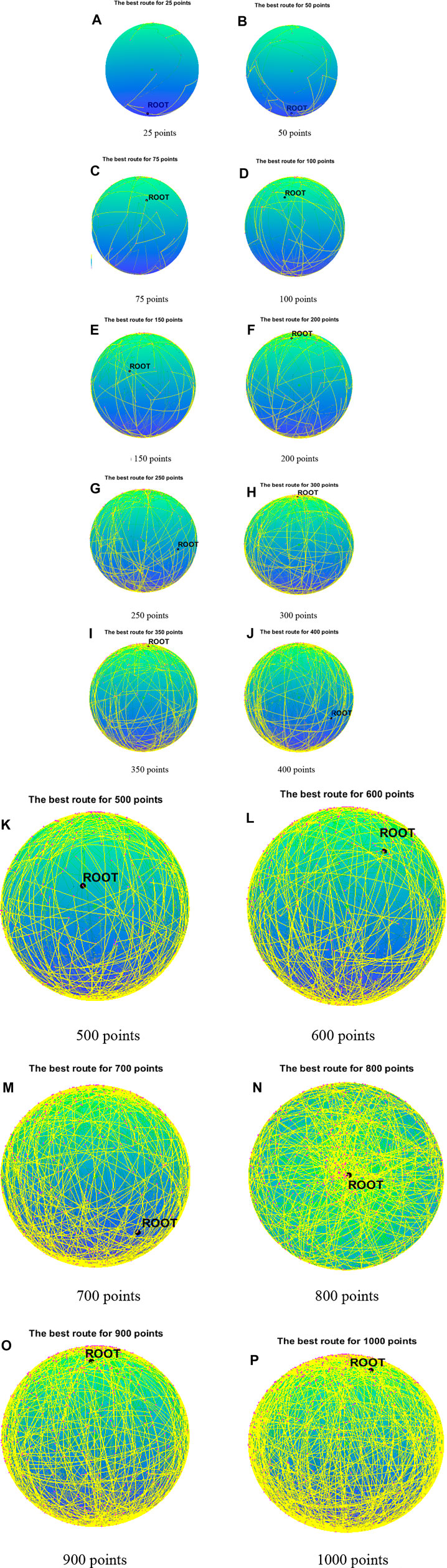
FIGURE 12. The minimum spanning tree for 16 cases. (A) 25 points. (B) 50 points. (C) 75 points. (D) 100 points. (E) 150 points. (F) 200 points. (G) 250 points. (H) 300 points. (G) 250 points. (H) 300 points. (I) 350 points. (J) 400 points. (K) 500 points. (L) 600 points. (M) 700 points. (N) 800 points. (O) 900 points. (P) 1000 points.
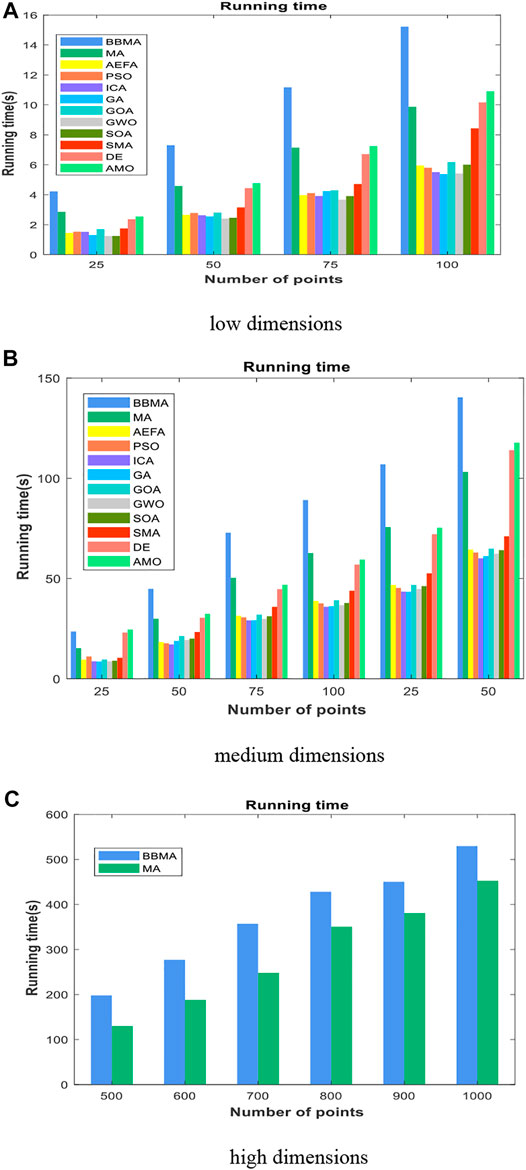
FIGURE 13. The average running time for 16 cases. (A) Low dimensions. (B) Medium dimensions. (C) High dimensions.

TABLE 6. Wilcoxon rank-sum test results in high dimensions.
Conclusion and Future Work
Mayfly algorithm is a new population-based bioinspired algorithm, which has strong ability to solve continuous problems. It combines the advantages of PSO, FA, and GA and has superior exploration ability, high solution accuracy, and fast convergence. It improves the shortcoming that MA has many initial parameters and the parameters have a large impact on the results. Furthermore, Lévy flight is used for updating the position of the optimal male and excellent female to help the algorithm escape from local optimal solution. In addition, in order to make effective use of the search space, a cross-border punishment mechanism similar to “mirror wall” is used to deal with cross-border individuals. In order to demonstrate the effectiveness of BBMA, the MST problems are solved on a sphere. Compared with MA, AEFA, GA, PSO, ICA, SOA, GOA, GWO, SMA, DE, and AMO in 16 different cases, the test results show that BBMA has superior solving ability, and the higher the dimension is, the more obvious the superiority of BBMA will be. Therefore, BBMA is a good method for large-scale problems in real life. According to the NFL theorem, there is no algorithm that has superior performance for any problem. BBMA has some limitations in solving the spherical MST problems: its running time is relatively long, and its stability needs to be improved. In the future, BBMA will be further applied for solving the spherical MST problems in real life, such as removing noise on the femoral surface and directional location estimators (Kirschstein et al., 2013; Kirschstein et al., 2019). Also, it will be applied to other practical applications, such as logistics center location, path planning, weather forecast, and charging station address selection.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding authors.
Author Contributions
TZ: Investigation, experiment, writing-draft; YZ: Supervision, Writing-review and editing. GZ :Experiment, formal analysis; WD: Writing—review and editing. QL:Supervisio.
Funding
This work was supported by the National Science Foundation of China under Grant Nos. 62066005 and 61771087, Project of the Guangxi Science and Technology under Grant No. AD21196006, and Program for Young Innovative Research Team in China University of Political Science and Law, under Grant No. 21CXTD02.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abd Elaziz, M., Senthilraja, S., Zayed, M. E., Elsheikh, A. H., Mostafa, R. R., and Lu, S. (2021). A New Random Vector Functional Link Integrated with Mayfly Optimization Algorithm for Performance Prediction of Solar Photovoltaic thermal Collector Combined with Electrolytic Hydrogen Production System. Appl. Therm. Eng. 193, 117055. doi:10.1016/j.applthermaleng.2021.117055
Abualigah, L., Diabat, A., Mirjalili, S., Abd Elaziz, M. Elaziz., and Gandomi, A. H. (2021). The Arithmetic Optimization Algorithm. Comp. Methods Appl. Mech. Eng. 376, 113609. doi:10.1016/j.cma.2020.113609
Alsattar, H. A., Zaidan, A. A., and Zaidan, B. B. (2020). Novel Meta-Heuristic Bald eagle Search Optimisation Algorithm. Artif. Intell. Rev. 53, 2237–2264. doi:10.1007/s10462-019-09732-5
Anita, A. Y., and Yadav, A. (2019). AEFA: Artificial Electric Field Algorithm for Global Optimization. Swarm Evol. Comput. 48, 93–108. doi:10.1016/j.swevo.2019.03.013
Atashpaz-Gargari, E., and Lucas, C. (2008). “Imperialist Competitive Algorithm: An Algorithm for Optimization Inspired by Imperialistic Competition,” in IEEE Congress on Evolutionary Computation, Singapore, September 25-28, 2007, 4661–4667.
Barshandeh, S., and Haghzadeh, M. (2020). A New Hybrid Chaotic Atom Search Optimization Based on Tree-Seed Algorithm and Levy Flight for Solving Optimization Problems. Eng. Comput. 37, 3079–3122. doi:10.1007/s00366-020-00994-0
Beardwood, J., Halton, J. H., and Hammersley, J. M. (1959). The Shortest Path through many Points. Math. Proc. Camb. Phil. Soc. 55 (4), 299–327. doi:10.1017/s0305004100034095
Bhattacharyya, T., Chatterjee, B., Singh, P. K., Yoon, J. H., Geem, Z. W., and Sarkar, R. (2020). Mayfly in harmony: a New Hybrid Meta-Heuristic Feature Selection Algorithm. IEEE Access 8, 195929–195945. doi:10.1109/access.2020.3031718
Bi, J., Zhou, Y., Tang, Z., and Luo, Q. (2021). Artificial Electric Field Algorithm with Inertia and Repulsion for Spherical Minimum Spanning Tree. Appl. Intelligence 52, 195–214. doi:10.1007/s10489-021-02415-1
Bo Jiang, Z. (2009). Li. Research on Minimum Spanning Tree Based on Prim Algorithm. Comput. Eng. Des. 30 (13), 3244–3247. doi:10.1115/MNHMT2009-18287
Chen, L., Xu, C., Song, H., and Jermsittiparsert, K. (2021). Optimal Sizing and Sitting of Evcs in the Distribution System Using Metaheuristics: a Case Study. Energ. Rep. 7 (1), 208–217. doi:10.1016/j.egyr.2020.12.032
Chen, X., Zhou, Y., Tang, Z., and Luo, Q. (2017). A Hybrid Algorithm Combining Glowworm Swarm Optimization and Complete 2-opt Algorithm for Spherical Travelling Salesman Problems. Appl. Soft Comput. 58, 104–114. doi:10.1016/j.asoc.2017.04.057
Chen, Y., Yu, J., Mei, Y., Wang, Y., and Su, X. (2016). Modified central Force Optimization (MCFO) Algorithm for 3D UAV Path Planning. Neurocomputing 171, 878–888. doi:10.1016/j.neucom.2015.07.044
Crabb, M. C. (2006). Counting Nilpotent Endomorphisms. Finite Fields Their Appl. 12 (1), 151–154. doi:10.1016/j.ffa.2005.03.001
Derrac, J., García, S., Molina, D., and Herrera, F. (2011). A Practical Tutorial on the Use of Nonparametric Statistical Tests as a Methodology for Comparing Evolutionary and Swarm Intelligence Algorithms. Swarm Evol. Comput. 1 (1), 3–18. doi:10.1016/j.swevo.2011.02.002
Dhiman, G., and Kumar, V. (2019). Seagull Optimization Algorithm: Theory and its Applications for Large-Scale Industrial Engineering Problems. Knowledge-Based Syst. 165, 169–196. doi:10.1016/j.knosys.2018.11.024
Dinkar, S. K., and Deep, K. (2018). An Efficient Opposition Based Lévy Flight Antlion Optimizer for Optimization Problems. J. Comput. Sci. 29, 119–141. doi:10.1016/j.jocs.2018.10.002
Eldem, H., and Ülker, E. (2017). The Application of Ant colony Optimization in the Solution of 3D Traveling Salesman Problem on a Sphere. Eng. Sci. Technol. Int. J. 20, 1242–1248. doi:10.1016/j.jestch.2017.08.005
Faramarzi, A., Heidarinejad, M., Stephens, B., and Mirjalili, S. (2019). Equilibrium Optimizer: A Novel Optimization Algorithm. Knowledge-Based Syst. 191, 105190. doi:10.1016/j.knosys.2019.105190
Faramarzi, A., Heidarinejad, M., Mirjalili, S., and Gandomi, A. H. (2020). Marine Predators Algorithm: A Nature-Inspired Metaheuristic. Expert Syst. Appl. 152, 113377. doi:10.1016/j.eswa.2020.113377
Gibbons, J. D., and Chakraborti, S. (2011). Nonparametric Statistical Inference. Berlin: Springer, 977–979. doi:10.1007/978-3-642-04898-2_420
Goldberg, D. E. (1989). Genetic Algorithm in Search, Optimization, and Machine Learning. Boston: Addison-Wesley Pub. Co.
Graham, R. L., and Hell, P. (1985). On the History of the Minimum Spanning Tree Problem. IEEE Ann. Hist. Comput. 7 (1), 43–57. doi:10.1109/mahc.1985.10011
Guo, X., Yan, X., and Jermsittiparsert, K. (2021). Using the Modified Mayfly Algorithm for Optimizing the Component Size and Operation Strategy of a High Temperature PEMFC-Powered CCHP. Energ. Rep. 7 (11), 1234–1245. doi:10.1016/j.egyr.2021.02.042
Hearn, D. D., and Pauline Baker, M. (2004). Computer Graphics with Open GL. Beijing: Publishing House of Electronics Industry, 672.
Heidari, A. A., Mirjalili, S., Faris, H., Mafarja, I. M., and Chen, H. (2019). Harris Hawks Optimization: Algorithm and Applications. Future Generation Comp. Syst. 97, 849–872. doi:10.1016/j.future.2019.02.028
Holland, J. H. (1992). Genetic Algorithms. Sci. Am. 267 (1), 66–72. doi:10.1038/scientificamerican0792-66
Hsinghua, C., Premkumar, G., and Chu, C.-H. (2001). Genetic Algorithms for Communications Network Design - an Empirical Study of the Factors that Influence Performance. IEEE Trans. Evol. Computat. 5 (3), 236–249. doi:10.1109/4235.930313
Jain, M., Singh, V., and Rani, A. (2018). A Novel Nature-Inspired Algorithm for Optimization: Squirrel Search Algorithm. Swarm Evol. Comput. 44, 148–175. doi:10.1016/j.swevo.2018.02.013
Joseph, K. B. (1956). On the Shortest Spanning Subtree of a Graph and the Traveling Salesman Problem. Am. Math. Soc. 7 (1), 48–50.
Katagiri, H., Hayashida, T., Nishizaki, I., and Guo, Q. (2012). A Hybrid Algorithm Based on Tabu Search and Ant colony Optimization for K-Minimum Spanning Tree Problems. Expert Syst. Appl. 39 (5), 5681–5686. doi:10.1016/j.eswa.2011.11.103
Kennedy, J. (2003). “Bare Bones Particle Swarms,” in IEEE Swarm Intelligence Symposium, Indianapolis, IN, USA, April 26, 2003, 80–87.
Kennedy, J., and Eberhart, R. (1995). “Particle Swarm Optimization,” in Proc. of 1995 IEEE Int. Conf. Neural Networks, Perth, WA, Australia, November 27-December 01, 1995, 1942–1948.
Khishe, M., and Mosavi, M. R. (2020). Chimp Optimization Algorithm. Expert Syst. Appl. 149, 113338. doi:10.1016/j.eswa.2020.113338
Kirschstein, T., Liebscher, S., and Becker, C. (2013). Robust Estimation of Location and Scatter by Pruning the Minimum Spanning Tree. J. Multivariate Anal. 120 (9), 173–184. doi:10.1016/j.jmva.2013.05.004
Kirschstein, T., Liebscher, S., Pandolfo, G., Porzio, G. C., and Ragozini, G. (2019). On Finite-Sample Robustness of Directional Location Estimators. Comput. Stat. Data Anal. 133, 53–75. doi:10.1016/j.csda.2018.08.028
Li, J., Liu, Z., and Wang, X. (2021). Public Charging Station Location Determination for Electric Ride-Hailing Vehicles Based on an Improved Genetic Algorithm. Sust. Cities Soc. 74 (4), 103181. doi:10.1016/j.scs.2021.103181
Li, S., Chen, H., Wang, M., Heidari, A. A., and Mirjalili, S. (2020). Slime Mould Algorithm: a New Method for Stochastic Optimization. Future Generation Comp. Syst. 111, 300–323. doi:10.1016/j.future.2020.03.055
Li, X., and Yin, M. (2011). Hybrid Differential Evolution with Biogeography-Based Optimization for Design of a Reconfigurable Antenna Array with Discrete Phase Shifters. Int. J. Antennas Propagation 2011 (1), 235–245. doi:10.1155/2011/685629
Li, X., and Yin, M. (2011). Design of a Reconfigurable Antenna Array with Discrete Phase Shifters Using Differential Evolution Algorithm. Pier B 31, 29–43. doi:10.2528/pierb11032902
Li, X., Zhang, J., and Yin, M. (2014). Animal Migration Optimization: an Optimization Algorithm Inspired by Animal Migration Behavior. Neural Comput. Applic 24, 1867–1877. doi:10.1007/s00521-013-1433-8
Liang, X., Kou, D., and Wen, L. (2020). An Improved Chicken Swarm Optimization Algorithm and its Application in Robot Path Planning. IEEE Access 8, 49543–49550. doi:10.1109/access.2020.2974498
Liu, Y., Chai, Y., Liu, B., and Wang, Y. (2021). Bearing Fault Diagnosis Based on Energy Spectrum Statistics and Modified Mayfly Optimization Algorithm. Sensors 21 (6), 2245. doi:10.3390/s21062245
Liu, Z., Jiang, P., Wang, J., and Zhang, L. (2021). Ensemble Forecasting System for Short-Term Wind Speed Forecasting Based on Optimal Sub-model Selection and Multi-Objective Version of Mayfly Optimization Algorithm. Expert Syst. Appl. 177, 114974. doi:10.1016/j.eswa.2021.114974
Lomnitz, C. (1995). On the Distribution of Distances between Random Points on a Sphere. Bull. Seismological Soc. America 85 (3), 951–953. doi:10.1785/bssa0850030951
Majumder, A., Majumder, A., and Bhaumik, R. (2021). Teaching-Learning-Based Optimization Algorithm for Path Planning and Task Allocation in Multi-Robot Plant Inspection System. Arab J. Sci. Eng. 46, 8999–9021. doi:10.1007/s13369-021-05710-8
Mirjalili, S., Mirjalili, S. M., and Lewis, A. (2014). Grey Wolf Optimizer. Adv. Eng. Softw. 69, 46–61. doi:10.1016/j.advengsoft.2013.12.007
Neumann, F., and Witt, C. (2007). Ant colony Optimization and the Minimum Spanning Tree Problem. Theor. Comp. Sci. 411 (25), 2406–2413. doi:10.1016/j.tcs.2010.02.012
Nezamivand, S., Ahmad, B., and Najafi, F. (2018). PSOSCALF: A New Hybrid PSO Based on Sine Cosine Algorithm and Levy Flight for Solving Optimization Problems. Appl. Soft Comput. 73, 697–726. doi:10.1016/j.asoc.2018.09.019
Ning, L., and Wang, L. (2020). Bare-Bones Based Sine Cosine Algorithm for Global Optimization. J. Comput. Sci. 47, 101219. doi:10.1016/j.jocs.2020.101219
Ouyang, X., Zhou, Y., Luo, Q., and Chen, H. (2013). A Novel Discrete Cuckoo Search Algorithm for Spherical Traveling Salesman Problem. Appl. Math. Inf. Sci. 7 (2), 777–784. doi:10.12785/amis/070248
Ren, H., Li, J., Chen, H., and Li, C. (2021). Adaptive Levy-Assisted Salp Swarm Algorithm: Analysis and Optimization Case Studies. Mathematics Comput. Simulation 181, 380–409. doi:10.1016/j.matcom.2020.09.027
Saremi, S., Mirjalili, S., and Lewis, A. (2017). Grasshopper Optimisation Algorithm: Theory and Application. Adv. Eng. Softw. 105, 30–47. doi:10.1016/j.advengsoft.2017.01.004
Singh, A. (2009). An Artificial Bee colony Algorithm for the Leaf-Constrained Minimum Spanning Tree Problem. Appl. Soft Comput. 9 (2), 625–631. doi:10.1016/j.asoc.2008.09.001
Singh, P., and Mittal, N. (2021). An Efficient Localization Approach to Locate Sensor Nodes in 3D Wireless Sensor Networks Using Adaptive Flower Pollination Algorithm. Wireless Netw. 27 (3), 1999–2014. doi:10.1007/s11276-021-02557-7
Song, X.-F., Zhang, Y., Gong, D.-W., and Sun, X.-Y. (2020). Feature Selection Using Bare-Bones Particle Swarm Optimization with Mutual Information. Pattern Recognition 112, 107804. doi:10.1016/j.patcog.2020.107804
Storn, R., and Price, K. (1997). Differential Evolution – A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optimization 11 (4), 341–359. doi:10.1023/a:1008202821328
Uğur, A., Korukoğlu, S., Ali, Ç., and Cinsdikici, M. (2009). Genetic Algorithm Based Solution for Tsp on a Sphere. Math. Comput. Appl. 14 (3), 219–228. doi:10.3390/mca14030219
Wang, D., Meng, L., and Zhao, W. (2016). Improved Bare Bones Particle Swarm Optimization with Adaptive Search center. Chin. J. Comput. 39 (12), 2652–2667. doi:10.11897/SP.J.1016.2016.02652
Wikipedia (2012). Great circle. Available at: http://en.wikipedia.org/wiki/Great_circle.2012.
Yan, Z., Zhang, J., and Tang, J. (2021). Path Planning for Autonomous Underwater Vehicle Based on an Enhanced Water Wave Optimization Algorithm. Maths. Comput. Simulation 181, 192–241. doi:10.1016/j.matcom.2020.09.019
Yang, X.-S. (2009). “Firefly Algorithms for Multimodal Optimization,” in Stochastic Algorithms: Foundations and Applications. SAGA 2009. Lecture Notes in Computer Science (Berlin: Springer), 5792, 169–178. doi:10.1007/978-3-642-04944-6_14
Yapici, H., and Cetinkaya, N. (2019). A New Meta-Heuristic Optimizer: Pathfinder Algorithm. Appl. Soft Comput. 78, 545–568. doi:10.1016/j.asoc.2019.03.012
Yue, Y., Cao, Li., Hu, J., Cai, S., Hang, B., and Wu, H. (2019). A Novel Hybrid Location Algorithm Based on Chaotic Particle Swarm Optimization for Mobile Position Estimation. IEEE Access 7 (99), 58541–58552. doi:10.1109/access.2019.2914924
Zervoudakis, K., and Tsafarakis, S. (2020). A Mayfly Optimization Algorithm. Comput. Ind. Eng. 145, 106559. doi:10.1016/j.cie.2020.106559
Zhang, Y., Gong, D.-w., Sun, X.-y., and Geng, N. (2014). Adaptive Bare-Bones Particle Swarm Optimization Algorithm and its Convergence Analysis. Soft Comput. 18 (7), 1337–1352. doi:10.1007/s00500-013-1147-y
Zhou, G., Gen, M., and Wu, T. (1996). “A New Approach to the Degree-Constrained Minimum Spanning Tree Problem Using Genetic Algorithm,” in 1996 IEEE International Conference on Systems, Man and Cybernetics. Information Intelligence and Systems (Cat. No.96CH35929), Beijing, China, October 14-17, 1996, 2683–2688.
Keywords: mayfly algorithm, bare bones mayfly algorithm, large-scale spherical MST, Prüfer code, bioinspired algorithm
Citation: Zhang T, Zhou Y, Zhou G, Deng W and Luo Q (2022) Bioinspired Bare Bones Mayfly Algorithm for Large-Scale Spherical Minimum Spanning Tree. Front. Bioeng. Biotechnol. 10:830037. doi: 10.3389/fbioe.2022.830037
Received: 06 December 2021; Accepted: 14 January 2022;
Published: 01 March 2022.
Edited by:
Zhihua Cui, Taiyuan University of Science and Technology, ChinaCopyright © 2022 Zhang, Zhou, Zhou, Deng and Luo. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Yongquan Zhou, emhvdXlvbmdxdWFuQGd4dW4uZWR1LmNu