 Salil Apte1*
Salil Apte1* Mathieu Falbriard1
Mathieu Falbriard1 Frédéric Meyer2,3
Frédéric Meyer2,3 Grégoire P. Millet3
Grégoire P. Millet3 Vincent Gremeaux3,4
Vincent Gremeaux3,4 Kamiar Aminian1
Kamiar Aminian1- 1Laboratory of Movement Analysis and Measurement, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland
- 2Digital Signal Processing Group, Department of Informatics, University of Oslo, Oslo, Norway
- 3Institute of Sport Sciences, University of Lausanne, Lausanne, Switzerland
- 4Sport Medicine Unit, Division of Physical Medicine and Rehabilitation, Swiss Olympic Medical Center, Lausanne University Hospital, Lausanne, Switzerland
Feedback of power during running is a promising tool for training and determining pacing strategies. However, current power estimation methods show low validity and are not customized for running on different slopes. To address this issue, we developed three machine-learning models to estimate peak horizontal power for level, uphill, and downhill running using gait spatiotemporal parameters, accelerometer, and gyroscope signals extracted from foot-worn IMUs. The prediction was compared to reference horizontal power obtained during running on a treadmill with an embedded force plate. For each model, we trained an elastic net and a neural network and validated it with a dataset of 34 active adults across a range of speeds and slopes. For the uphill and level running, the concentric phase of the gait cycle was considered, and the neural network model led to the lowest error (median ± interquartile range) of 1.7% ± 12.5% and 3.2% ± 13.4%, respectively. The eccentric phase was considered relevant for downhill running, wherein the elastic net model provided the lowest error of 1.8% ± 14.1%. Results showed a similar performance across a range of different speed/slope running conditions. The findings highlighted the potential of using interpretable biomechanical features in machine learning models for the estimating horizontal power. The simplicity of the models makes them suitable for implementation on embedded systems with limited processing and energy storage capacity. The proposed method meets the requirements for applications needing accurate near real-time feedback and complements existing gait analysis algorithms based on foot-worn IMUs.
1 Introduction
Mechanical power generated during running is a measure of the intensity of the run. As an indicator of intensity, power can be used to augment external load monitoring for training programs and to develop pacing strategies for competitions. A reduction in running power for a constant running speed indicates a decrease in aerobic power and thus an improvement in running economy (Taboga et al., 2021). Internal factors, such as fatigue, stress, and hydration, or environmental factors, such as humidity, temperature, and presence of competitors, can influence the perception of internal load and heart rate response (Halson, 2014). Since running power is not directly affected by these factors, it can serve as a useful additional metric for monitoring the training load (Paquette et al., 2020). Unlike heart rate, which is affected by cardiac drift and has a higher response latency (Billat et al., 2020), power provides an immediate measure of running intensity and can thus potentially help optimize pacing strategies. In cycling, the widespread use of mechanical power as a tool for optimizing training adaptation has been facilitated by the availability of reliable power meters (Erp et al., 2019). Since the crankshaft force and speed can be measured directly, mechanical power can be measured with sensors integrated into the bicycle (Passfield et al., 2017). However, such a direct measurement of force and speed during real-world running is challenging.
Mechanical power is defined as the time derivative of mechanical work or the rate at which work is performed. Thus, quantification of mechanical work during running provides a way for estimating the power. Different in-lab approaches have been proposed to measure the total mechanical work produced by the body and derive the power for level running over a range of speeds (Cavagna et al., 1964; Cavagna and Kaneko, 1977; Williams and Cavanagh, 1987; Rabita et al., 2015; van der Kruk et al., 2018). Mechanical work is classified into two types: internal work, i.e., the work carried out in moving the limbs with respect to the center of mass (CoM) of the body and external work, which results from the movement of CoM of the body with respect to the environment (Cavagna and Kaneko, 1977). Limb motion is usually measured with marker-based motion tracking systems, whereas CoM kinetics and ground reaction forces (GRFs) additionally require the use of force plates. When comparing estimated mechanical power at similar speeds, existing approaches based on these instrumentation resulted in different findings, and an universally accepted approach has not been established (Arampatzis et al., 2000; Winter et al., 2016; van der Kruk et al., 2018). However, The inclusion of GRF and running speed in the estimation of work and power improved accuracy and was consistent with expected increase in power due to an increase in running speed (Arampatzis et al., 2000). The incline of the running surface may influence speed and GRF and possibly running power (Wickler et al., 2000). Therefore, the GRF, running speed, and incline of the running surface can be considered together as a reference system for estimation. However, accurate measurement of GRF with force plates is impractical under real-world running conditions.
Wearable inertial measurement units (IMUs) have been used to estimate peak braking GRF (Neugebauer et al., 2014). However, the complete antero-posterior GRF profile is essential for the estimation of mechanical work (and power) involved in push-off and braking phases (Arellano and Kram, 2014). Furthermore, these estimations of GRF have been validated for level running and may not show similar performance under uphill and downhill conditions. Of the commercially available body-worn devices, studies recommend the foot-worn Stryd™ device due to its high repeatability of measurements and its concurrent validity (r ≥ 0.911; SEE ≤7.3%) with respect to the VO2 values (Cerezuela-Espejo et al., 2021). One study reports the power estimated by the Stryd device for different treadmill speeds during level running to reflect (mean difference M.D.: −1.04 W kg-1; limits of agreement L.O.A: −2.3 to 0.18 W kg-1) the reference power measured as a dot product of horizontal (in the direction of running) and vertical forces and velocity, respectively, obtained from a force plate (Taboga et al., 2021). Another study, however, reports an underestimation of power from the Stryd™ device (Imbach et al., 2020). Furthermore, this system has not been validated for running on slopes, which is an important requirement for trail running or long-distance races. Finally, the estimated power output has shown inadequate changes in response to intentional changes in running technique and temporal parameters (Baumgartner et al., 2021), such as step frequency (±10% change), contact time (∼ ±20 ms), and arm swing (presence/absence). Analytical models have focused either on the characterization of the overall race performance (Mulligan et al., 2018) or only on the power requirement while running on flat terrain (Jenny and Jenny, 2020). An approach based on simulated wearable IMUs has shown promise (RMS error range 4.2%–20.1%) but requires data from 15 body segments (Fohrmann et al., 2019). In this study, IMU data were simulated with the virtual acceleration and angular velocity values obtained from a full-body marker-based motion capture system. Neither of these power estimation approaches are suitable for accurate near real-time feedback in the field.
Given the potential of body-worn IMU and global navigation satellite system (GNSS) to estimate running speed (Apte et al., 2020; Falbriard et al., 2021), the relationship between mechanical power and running speed (García-Pinillos et al., 2019) could be used to predict power. However, this relationship is affected by terrain slope and running technique. Terrain slope can be estimated using accelerometer signals (Herren et al., 1999) or a barometer (Moncada-Torres et al., 2014), while the running technique can be characterized by spatiotemporal gait parameters. One such parameter is the vertical stiffness of the spring-mass model used to simulate running, which explains the higher efficiency of running movement that far exceeds analytic muscle efficiency (Cavagna et al., 1964). Although vertical stiffness cannot be measured directly under real running conditions, it can be estimated indirectly using spatiotemporal parameters such as contact time, flight time, and running speed. Previous research has presented an accurate assessment of these parameters (Falbriard et al., 2018; 2020) and their application under real-world conditions (Apte et al., 2022; Prigent et al., 2022) using foot-worn IMUs.
The current study aims to extend this work by estimating horizontal running power during level and graded running at different running speeds. Here, horizontal power is defined only through the components of force and velocity in the running direction and thus directly relates to the ability of the athletes to produce higher propulsion (Jaskólski et al., 1996). This definition is useful for application as a feedback tool for measuring and optimizing running intensity during training and competition and can be tracked longitudinally across multiple training sessions to measure improvements in the capacity of runners (Aubry et al., 2018; Paquette et al., 2020). With a single IMU on each foot, we aimed to achieve similar, if not better, performance (RMS error range 4.2%–20.1%) to that obtained with a simulated whole-body setup IMU (Fohrmann et al., 2019). We considered approaches based on machine learning because of their demonstrated potential for unobtrusive analysis of running that can identify movement-specific risk factors for injury (Franklyn-Miller et al., 2017), accurate estimation of running speed, GRFs, and lower extremity kinematics (Wouda et al., 2018; Gholami et al., 2020; Falbriard et al., 2021), and identification of movement deficiencies (Richter et al., 2019) (Xiang et al., 2022). The various situations considered here include a range of running speeds and inclines, knowledge of which will serve as complementary information to that obtained from IMU signals. In addition, the models proposed here are intended to be computationally inexpensive to allow their use in near real-time power estimation with conventional embedded electronic devices.
2 Methods
2.1 Materials and measurement protocol
Measurements were conducted with 34 healthy subjects (age: 35 ± 11 years; height: 174 ± 10 cm; weight: 69 ± 12 kg; max. aerobic speed: 16.89 ± 2.81 km/h) on a motorized treadmill (T-170-FMT, Arsalis, Belgium). Ethical approval for the study was obtained from the Human Research Ethics Committee (CER-VD 2015-00006), and prior written consent was obtained from all the participants. The treadmill was customized to enable an adjustable inclination and incorporated a force plate with 3-D force recording at 1,000 Hz. The participants were equipped with IMUs (Physilog 5, GaitUp, Switzerland) attached to the shoelaces using rubber clips. Acceleration (±16 g) and angular velocity (±2,000 deg/s) were recorded at 512 Hz and were calibrated according to Ferraris et al. (1995) before each measurement session. The participants were allowed to wear their personal running shoes. Figure 1A illustrates this sensor setup.
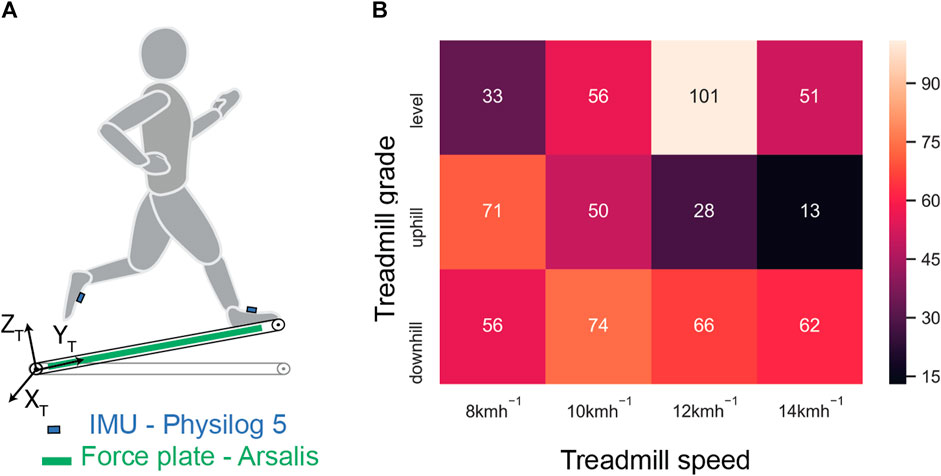
FIGURE 1. Measurement systems and protocol. (A) An IMU was attached to each foot, and force plate data were used as the reference. XT-YT-ZT represents the frame of reference attached to the treadmill. (B) Number of recorded running trials for each treadmill speed for all three treadmill grades. This information was used for balancing the dataset.
The treadmill running protocol included four sessions with different combinations of treadmill speed and gradient, which were separated enough (≥1 week) to allow recovery in between. The first session aimed to evaluate participants’ fitness, based on ventilatory threshold and VO2max assessments using an incremental speed test. As an incentive, each participant received an evaluation of his/her running performance (ventilatory thresholds and VO2max level) and running technique. In sessions 2, 3, and 4, the participants went through a series of 4-min running bouts at different running speeds (8, 10, 12, and 14 km/h) and slope gradients (0%, ±5%, ±10%, +15%, and ±20%). The order of these conditions was shuffled between sessions in order to remove experimental bias. We used VO2max assessments to personalize the different running conditions (speeds and slopes) within each session to avoid excessive fatigue of the participants (Morgan and Daniels, 1994; McGawley, 2017) and prevent a bias in the measurements. Among all the participants, 100% (34) completed the first session, 88% (30) completed the second session, 79% (27) completed the third session, and 71% (24) completed the fourth session. Figure 1B shows a reduction in participation with the increasing physical intensity of the conditions, which mainly corresponded to an increasing treadmill speed and grade. This led to an imbalanced dataset, with low-intensity runs being represented more.
2.2 Reference power estimation
The procedure for estimating the reference horizontal power is shown in Figure 2A. Force plate signals along the sagittal plane, in the direction of running (

FIGURE 2. Estimation of reference horizontal power. (A) Processing force plate data. (B) Free body diagram for up-hill running on the treadmill, with the runner represented as a single rigid body (point mass). (C) Free body diagram for downhill running.
Two main approaches have been considered in literature works for the estimation of horizontal power (Arampatzis et al., 2000): first is based on the GRF and the CoM motion and second is based on the estimation of the product of force–velocity or moment–angular velocity of all the individual limb segments (Cavagna et al., 1964; Cavagna and Kaneko, 1977). The latter method requires precise 3D motion tracking of each segment and is more prone to outliers in the results. Furthermore, the first method shows a better correspondence with oxygen uptake (Arampatzis et al., 2000). In this method (Rabita et al., 2015), the antero-posterior (in the direction of the run) GRF is used to estimate the antero-posterior acceleration, velocity, and horizontal power of the CoM. This method was adapted for graded running, as illustrated in Figure 2B, using the following equations:
where
During the implementation, all quantities are considered as scalars since the direction (
2.3 IMU data processing
The main steps for IMU data processing are shown in Figure 3. A fourth-order low-pass Butterworth filter (Fc = 50 Hz) was first applied onto the raw acceleration (
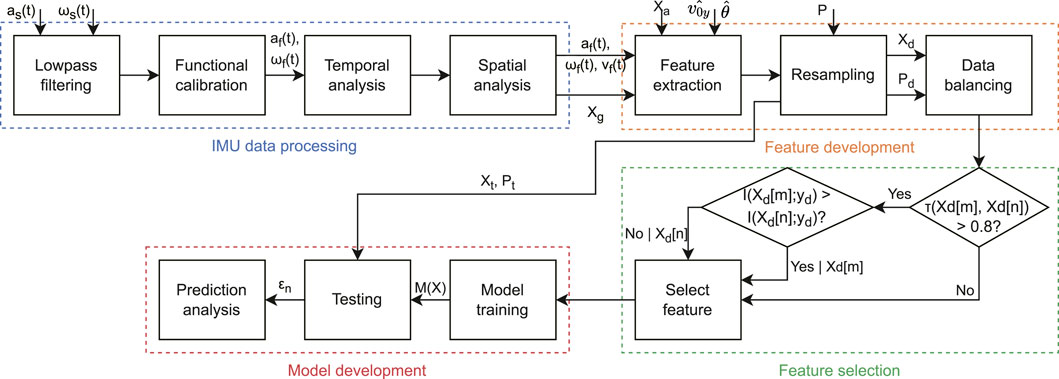
FIGURE 3. Block diagram for the proposed estimation method. The process is divided into four main parts: i) processing of the IMU signals, ii) extraction of features based on IMU signals, biomechanical and anthropomorphic parameters, treadmill speed, and slope, iii) selection of features based on reducing redundancy and maximizing the relevance, and iv) development and validation of the three models for level, uphill, and downhill running, respectively.
Due to the association between the changes in the duration of the gait phases and the running speed (Apte et al., 2021), ground contact time (tc), flight time (tf), swing time (ts), and stride duration (strd) for each step were computed using the data from the left and right foot. These temporal parameters were used as inputs for the spring-mass model to estimate vertical stiffness (kvert), maximum vertical force (fzmax), and maximum vertical displacement of the CoM (Δz) (Morin et al., 2005). Subsequently, we computed the orientation of the foot in the global frame (GF) XT-YT-ZT to estimate the foot strike angle (fsa) before initial contact and transformed the foot acceleration from the foot frame (FF) to the GF, after removing the gravitational acceleration. The resulting acceleration (in GF) was integrated using a trapezoidal rule to get a first estimate of the speed of the foot. We removed the integration drift by linearly resetting the speed at each stance phase (Falbriard et al., 2021), with the assumption of zero speed during the stance phase. Finally, we applied the inverse transformation to get the drift-corrected stride velocity of the foot segments (
2.4 Feature development
2.4.1 Feature extraction
The overall feature development process is shown in Figure 3. The feature set consisted of four different categories of features:
1. Parameters related to gait,
2. Statistical features,
3. Anthropomorphic information,
4. Running conditions,
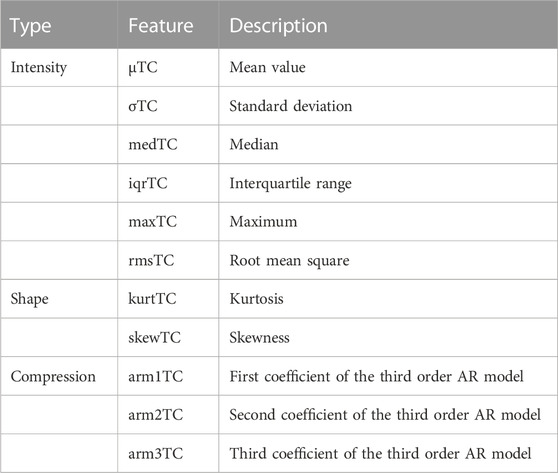
TABLE 1. Statistical features (
The overall feature set (X), with each feature as a vector of values, is shown as follows:
2.4.2 Resampling and dataset balancing
Because the feature set was based on segmentation of gait cycles, some inevitably misidentified gait cycles resulted in missing values. To address this problem, the data were resampled at a resolution of one value per second. Similarly, the reference power data were resampled at the same resolution and considered the response variable (P). Running conditions with a high positive grade and/or high speed had lower participation because of their high intensity, resulting in an imbalanced dataset (Figure 1B). By considering the speed as a class and dividing the grade into three conditions (level, uphill, and downhill), the classes were balanced using random over sampling (ROS) of underrepresented classes (Pes, 2020). Compared to random under sampling (RUS), ROS duplicates information rather than randomly removing samples of potentially rare conditions (e.g., high speed during uphill running). For ith class with ni samples, ROS was implemented as follows:
where
2.5 Feature selection
The feature set obtained as a result of feature extraction included a total of 171 features. To develop a simpler and more efficient model, we performed a feature selection process (Figure 3) using filter methods to remove the redundant and irrelevant features (Li et al., 2017). To identify the redundant feature pairs, we calculated the correlation between all possible feature pairs. Kendall’s τ was used to quantify the correlation between features; it is more robust than Spearman’s ρ and less sensitive to errors and discrepancies in the data (Newson, 2002). Whereas Pearson’s correlation only considers the linear relationship between variables, Kendall’s τ relies on the number of concordant and discordant pairs in the variables and does not require a specific functional relationship between variables (de Siqueira Santos et al., 2014). For feature pairs
Feature pairs with τ < 0.8 (selected based on trials with a range from 0.5 to 0.95) were selected for model development (see Figure 3), while others were further examined for their relevance to the response variable (
where
2.6 Model development
2.6.1 Model training
Our goal was to develop one model for each of the three running conditions. To ensure that features contributed equally to the model training and that coefficients were properly scaled, the features were rescaled using a z-score normalization method (Jain et al., 2005). Two approaches were pursued for model development—a linear model using elastic net (EN) regularization and a non-linear model using a neural network. Linear models enable computationally efficient implementation for near real-time analyses on conventional embedded devices. For similarly performing linear and non-linear models, EN allows us to understand the feature importance. EN linearly combines the L1 penalty of the LASSO regression method and the L2 penalty of the ridge regression method (Zou and Hastie, 2005). EN tends to maintain similar feature sparsity as the LASSO method while providing improved accuracy. Similarly, it overcomes the LASSO limitation of retaining only one of a group of linearly correlated predictors and tends to include the entire group (Zou and Hastie, 2005; Hastie et al., 2008a). The EN was implemented as shown in Eq. 10 and 11 with
where
2.6.2 Model validation and testing
The EN, NN15, and NN35 models were tested with the test set (
Median and interquartile range (IQR) of
3 Results
We analyzed 34 participants who ran on a treadmill at various speeds and inclines, including a total of 210.7 min level, 74.6 min uphill, and 112.4 min downhill running, which were used for training and testing the algorithm. The reference horizontal power estimated from the force plate data followed a nearly linearly increasing relationship with treadmill speed (Supplementary Figure S1), with uphill running exhibiting a higher peak power during the concentric phase of stance than level running, at the same speed. Figures 4A, B show the best case and worst case scenarios for the prediction in level running, respectively.
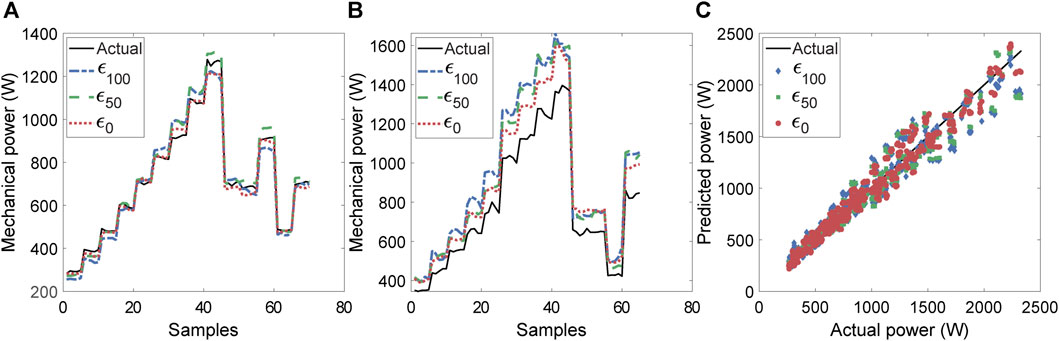
FIGURE 4. Illustration of actual and predicted horizontal power values for level running for all three noise levels on features. (A) Participant with the best estimation of power and (B) participant with the worst estimation. (C) Linear agreement between predicted and estimated power values.
The increasing power (stair pattern) corresponds to different running trials, each with higher speed than the preceding trial. The former (Figure 4A) does not exhibit a substantial difference between the prediction for the zero-noise level (
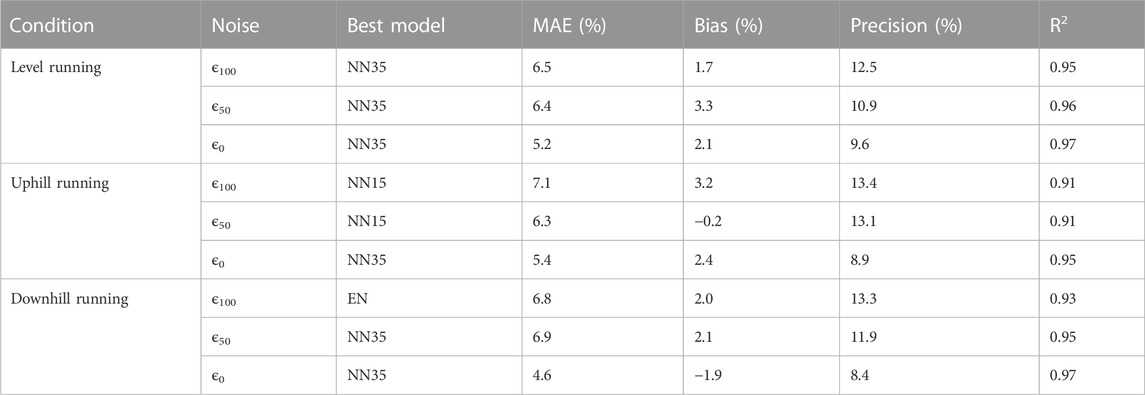
TABLE 2. Bias (median), precision (IQR), and mean absolute error (MAE) for the three running conditions, with different levels of noise on the features of speed and grade.
The Bland–Altman plot for power estimation with maximum noise (
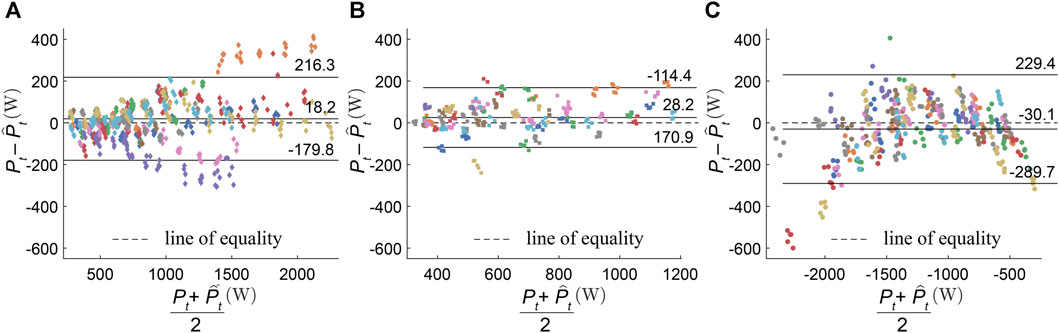
FIGURE 5. Bland–Altman analysis for horizontal power estimation with maximum noise (
The cumulative distribution of the error for all running conditions and noise levels is shown in Supplementary Figure S2. For 90% of the participants and under all conditions, the error remained below 20%, including any outliers. In contrast to level running, there was a larger influence of noisy running conditions (Xc) on the error distribution for running on inclines. For all three running conditions, the coefficients and labels for the 15 most important features of the EN models are presented in Table 3. The most important features were usually the mass (m) and the treadmill speed (
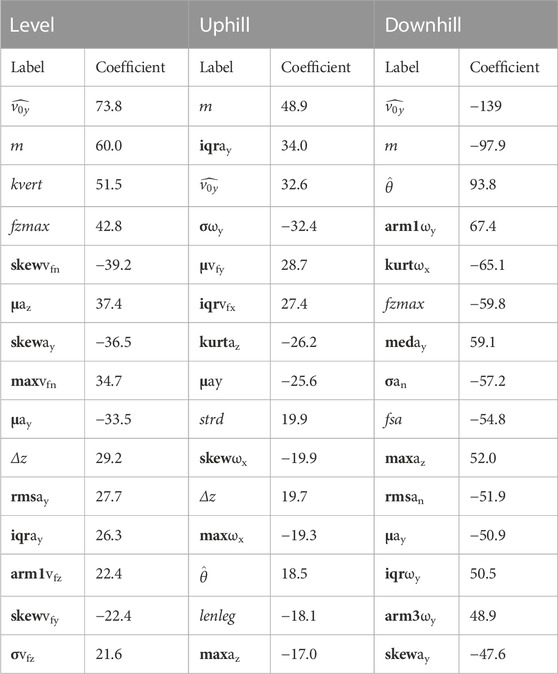
TABLE 3. Labels and coefficients for the 15 most important features of the EN models under all three conditions. Statistical features are defined according to Table 1 and are indicated in bold, with the signal direction (or norm) indicated using a subscript. Other features are defined as follows: kvert: vertical stiffness, fzmax: maximum vertical force, Δz: maximum vertical displacement of the CoM, strd: stride duration, and fsa: foot strike angle before initial contact. For downhill running, the negative sign indicates a positive contribution to the power estimation model since the predicted power is negative.
Figures 6A, B present the bias and precision for the estimation error across all treadmill speeds and slopes. For each positive slope and the −10% and −20% slopes, the bias was the largest at the highest speed reached (10.4% at 20% slope and 18.4% at −20% slope). However, the bias and the precision at the lowest treadmill speed (8 kmh-1) was generally high (21% ± 5.9%) at all slopes, including level running. At the 10 kmh-1 and 12 kmh-1 speed conditions, the estimation error showed a typically better precision (10.7% ± 2.0%).
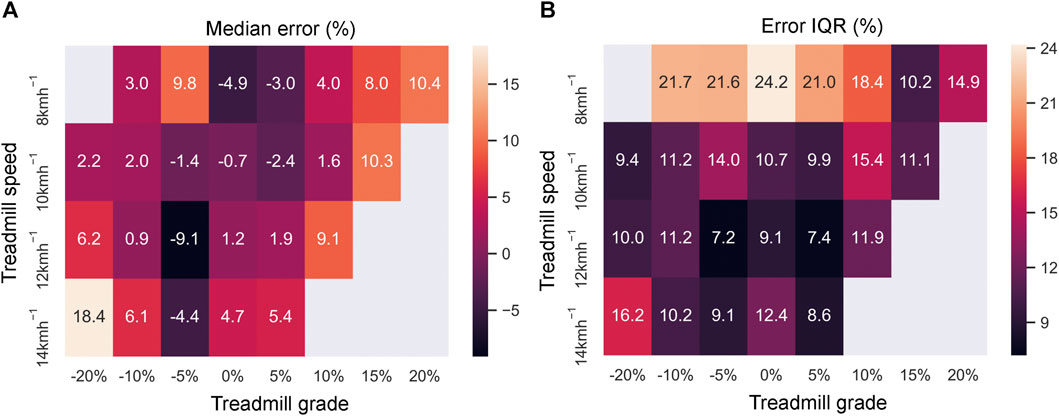
FIGURE 6. Estimation of error (%) for all running conditions. (A) Median error and (B) error IQR.
4 Discussion
The proposed method was able to track the reference horizontal peak power estimated from the force plates over a speed range from 8 kmh-1 to 14 kmh-1 and at slopes from −20% to 20%. It achieved a MAE 6.5%–7.1%, an IQR (precision) of 12.5%–13.4%, and a R2 ≥ 0.91 under all running conditions (Table 2). Although obtained using only foot-worn IMUs, these error magnitudes lie within the range of RMSE values (4%–20%) obtained using a simulated full-body IMU setup (Fohrmann et al., 2019). At the same speed, uphill running exhibited a higher peak power during the concentric phase of stance than level running (Supplementary Figure S1). These results are in agreement with the findings of Arampatzis et al. (2000) who compared different methods of estimating power from kinematic and ground reaction forces (GRF) data and recommended the use of GRF data-based methods. The best models for level, uphill, and downhill running (Table 2) were the neural network with 35% validation set (NN35), the neural network with 15% validation set (NN15), and elastic net (EN) regularization, respectively.
The bias (median error) was the highest under the conditions with the highest speed and slope (Figure 6A). Running under these intense conditions is highly demanding, which limited the availability of data for model training and likely biased the models toward lower or moderate intensity running conditions. The precision (IQR for the error) at the lowest treadmill speed (8 kmh-1) was generally high (21% ± 5.9%). The high IQR may also be the result of the running biomechanics associated with the low speed, as 8 kmh-1 is within the average range of walk-to-run transition speeds (4.68–9.18 kmh-1) for healthy participants (Thorstensson and Roberthson, 1987). In addition to biomechanics, the higher IQR may also be the result of noise added to the speed value. Because the amount of noise was fixed, the signal-to-noise ratio (SNR) was lowest at the lowest speed (8 kmh-1). Considering the fact that speed is one of the most important features (Table 3) for the EN model, a low SNR can lead to a higher error. Compared to the 8 kmh-1 condition, the 10 kmh-1 and 12 kmh-1 speed conditions resulted in a lower IQR of error (10.7% ± 2.0%). These two conditions are within the range of average preferred running speeds in the field: 9.86 kmh-1 (95% CI: 9.54–10.15 kmh-1) for female participants and 11.7 kmh-1 (95% CI: 11.45–12 kmh-1) for male participants (Selinger et al., 2022). Furthermore, these conditions also correspond to the optimal treadmill speeds in the laboratory, which result in minimal net metabolic cost of transport (energy expenditure per unit distance travelled) for running (Selinger et al., 2022). Thus, in the context of real-life scenarios, we can expect the algorithm to perform adequately. Furthermore, it is important to note that these results are for the condition with the highest amount of noise (ϵ100, Table 2). With a more accurate estimation of speed and slope, we can only expect the error IQR to reduce, as is evident in the error distribution plot (Supplementary Figure S2) and Table 2.
Taboga et al. (2021) compared commercially available power meters with force plate measurements for level running only and found a good agreement (L.O.A: −154.8 to 12.6 W; M.D.: −70.8 W, assuming a reported average mass of 68.1 kg). While the upper L.O.A is lower than our findings (L.O.A: −179.8 to 216.3 W; M.D.: 18.2 W), the M.D. is higher. However, L.O.A in our case has been extended mainly due to the samples from two participants (Figure 5A). We could not find existing validation studies ith graded running for comparison. As vertical force and velocity is considered for the estimation of power in case of commercial devices (Arampatzis et al., 2000; Taboga et al., 2021), hopping on the spot or increased vertical movement of the CoM during running may result in a higher power measurement. If the goal of using power as a feedback tool is to understand the intensity of the run, “power” in the direction of running (horizontal power) is a more interesting metric as it relates to the propulsion produced by the athlete (Jaskólski et al., 1996). This is despite the fact that power is a scalar quantity and “directional power” does not mechanically represent power (van der Kruk et al., 2018; Vigotsky et al., 2019). During the terminal stance phase, maximum mechanical power correlates with the push-off force generated by the concentric contraction of the thigh muscles, while maximum mechanical power absorbed during the initial contact indicates the energy absorbed by the eccentric contraction of the calf muscles (Mann and Hagy, 1980). The ability to run downhill at the same speed and gradient, but with a lower negative mechanical work, i.e., lower magnitude of “power” in the eccentric contraction phase is beneficial, as exercise-induced muscle damage during eccentric loading has a significant adverse effect on endurance performance (Marcora and Bosio, 2007). The reduction in impact forces can decrease the muscle fatigue accumulated during downhill running and possibly reduce injury risk in a trail running training program. Commercial devices only consider the power produced during the concentric phase and average this power over the entire stance phase duration, thus providing no insight into the “power” during the motion cycle. If both phases are considered together, it can lead to the averaging of positive and negative power, leading to their negation.
The EN model allows us to rank the features according to their importance (Zou and Hastie, 2005) based on the magnitude of their coefficients. We have presented the 15 most important features to explore the biomechanical contributions to the estimation of horizontal running power. However, it is important to point out that the proposed models cannot perform well by including only the 15 features presented. The list of features shows the mass (m) and the treadmill speed (
4.1 Limitations and future work
Some of the important statistical features (Table 3) are associated with signals in the X direction, i.e., the axis perpendicular to the sagittal plane. This suggests that the 2-D model (Figures 2B, C) used to estimate reference power can be extended to account for motion in all three dimensions. In addition, this model assumes that the athlete is a point mass driven by the GRF. Although the model is mechanically driven in equilibrium (van der Kruk et al., 2018), it can be augmented to include the 3-D kinetics of the body segments. Body weight normalization of the estimated power could help compensate for variations across individuals, although weight-normalized errors would translate differently to heavier and lighter individuals. Total power, including vertical and horizontal components, has been shown to correlate with metabolic power (Arampatzis et al., 2000). If the reported total power decreases at the same running speed (with training), one can assume improved efficiency. While we only considered horizontal power in this study, our methods could be extended to estimate total power, which could be useful as feedback on running efficiency.
To enable the application of our method in practice, algorithms using accelerometer signals (Herren et al., 1999) or barometer (Moncada-Torres et al., 2014) can be devised to identify uphill, downhill, and level running. Furthermore, the ratio between the absolute power from concentric work and eccentric work could potentially be utilized as a metric of mechanical efficiency (Vernillo et al., 2017). While our model has been tested on young healthy adults running on treadmills, it can be extended further and personalized to account for different populations (Hoenig et al., 2020). In addition to foot-worn sensors, IMUs on other segments, particularly the wrist and trunk, must be examined to estimate power. Wrist location offers ease of use and has been used for running gait analysis (Kammoun et al., 2022), while the trunk provides a position close to the CoM of the body.
5 Conclusion
In this work, we developed a method for accurate estimation of horizontal running power with foot-worn IMUs under various simulated real-world conditions. Different inclines (−20% to 20%) and running speeds (8 kmh-1 to 14 kmh-1) were considered to test the method with the force plate data used to estimate reference power. The proposed neural network model resulted in the lowest errors (median ± interquartile range) of 1.7% ± 12.5% and 3.2% ± 13.4% for the uphill and level running, respectively, whereas the proposed elastic net model showed the lowest error of 1.8% ± 14.1% for downhill running. We accurately estimated peak concentric power for downhill running and peak eccentric power for level and uphill running, which can potentially be used to define the training load for level and trail running. Athletes susceptible to or recovering from muscle injuries can use the eccentric power peak as a threshold for designing training programs with an appropriate mechanical load. This work can provide athletes and coaches with a more comprehensive understanding through reliable in-field quantitative feedback and help further personalize training programs.
Data availability statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Ethics statement
The studies involving human participants were reviewed and approved by Commission cantonale d’éthique de la recherche sur l’être humain Canton de Vaud (CER-VD 2015-00006). The patients/participants provided their written informed consent to participate in this study.
Author contributions
All authors designed the study, with FM and MF performing the measurements and preprocessing of the recorded data. MF estimated the biomechanical parameters, while SA developed the features, models, and their validation and wrote the first draft of the manuscript. All authors contributed to the article and approved the submitted version.
Funding
This work was supported by the European Union’s Horizon 2020 Research and Innovation Programme under Marie Skłodowska-Curie grant agreement no. 754354 and Innosuisse under grant number 32166.1 IP-ENG. Open access funding by École Polytechnique Fédérale de Lausanne.
Acknowledgments
The authors would like to warmly thank all participants who took part in our measurements and Alexis Giraudineau and Eloïse Pavlik for their help during the data collection.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fbioe.2023.1167816/full#supplementary-material
References
Apte, S., Meyer, F., Gremeaux, V., Dadashi, F., and Aminian, K. (2020). A sensor fusion approach to the estimation of instantaneous velocity using single wearable sensor during sprint. Front. Bioeng. Biotechnol. 8, 838. doi:10.3389/fbioe.2020.00838
Apte, S., Prigent, G., Stöggl, T., Martínez, A., Snyder, C., Gremeaux-Bader, V., et al. (2021). Biomechanical response of the lower extremity to running-induced acute fatigue: A systematic review. Front. Physiol. 12, 646042. doi:10.3389/fphys.2021.646042
Apte, S., Troxler, S., Besson, C., Gremeaux, V., and Aminian, K. (2022). Augmented cooper test: Biomechanical contributions to endurance performance. Front. Sports Act. Living. 4, 935272. doi:10.3389/fspor.2022.935272
Arampatzis, A., Knicker, A., Metzler, V., and Brüggemann, G.-P. (2000). Mechanical power in running: A comparison of different approaches. J. Biomech. 33, 457–463. doi:10.1016/S0021-9290(99)00187-6
Arellano, C. J., and Kram, R. (2014). Partitioning the metabolic cost of human running: A task-by-task approach. Integr. Comp. Biol. 54, 1084–1098. doi:10.1093/icb/icu033
Aubry, R. L., Power, G. A., and Burr, J. F. (2018). An assessment of running power as a training metric for elite and recreational runners. J. Strength Cond. Res. 32, 2258–2264. doi:10.1519/JSC.0000000000002650
Baumgartner, T., Held, S., Klatt, S., and Donath, L. (2021). Limitations of foot-worn sensors for assessing running power. Sensors 21, 4952. doi:10.3390/s21154952
Billat, V. L., Palacin, F., Correa, M., and Pycke, J.-R. (2020). Pacing strategy affects the sub-elite marathoner’s cardiac drift and performance. Front. Psychol. 10, 3026. doi:10.3389/fpsyg.2019.03026
Bland, J. M., and Altman, D. G. (2003). Applying the right statistics: Analyses of measurement studies. Ultrasound Obstet. Gynecol. 22, 85–93. doi:10.1002/uog.122
Cavagna, G. A., and Kaneko, M. (1977). Mechanical work and efficiency in level walking and running. J. Physiol. 268, 467–481. doi:10.1113/jphysiol.1977.sp011866
Cavagna, G. A., Heglund, N. C., and Willems, P. A. (2005). Effect of an increase in gravity on the power output and the rebound of the body in human running. J. Exp. Biol. 208, 2333–2346. doi:10.1242/jeb.01661
Cavagna, G. A., Saibene, F. P., and Margaria, R. (1964). Mechanical work in running. J. Appl. Physiol. 19, 249–256. doi:10.1152/jappl.1964.19.2.249
Cerezuela-Espejo, V., Hernández-Belmonte, A., Courel-Ibáñez, J., Conesa-Ros, E., Mora-Rodríguez, R., and Pallarés, J. G. (2021). Are we ready to measure running power? Repeatability and concurrent validity of five commercial technologies. Eur. J. Sport Sci. 21, 341–350. doi:10.1080/17461391.2020.1748117
de Siqueira Santos, S., Takahashi, D. Y., Nakata, A., and Fujita, A. (2014). A comparative study of statistical methods used to identify dependencies between gene expression signals. Brief. Bioinform. 15, 906–918. doi:10.1093/bib/bbt051
Erp, T. V., Sanders, D., and Koning, J. J. D. (2019). Training characteristics of male and female professional road cyclists: A 4-year retrospective analysis. Int. J. Sports Physiol. Perform. 15, 534–540. doi:10.1123/ijspp.2019-0320
Eston, R. G., Mickleborough, J., and Baltzopoulos, V. (1995). Eccentric activation and muscle damage: Biomechanical and physiological considerations during downhill running. Br. J. Sports Med. 29, 89–94. doi:10.1136/bjsm.29.2.89
Falbriard, M., Meyer, F., Mariani, B., Millet, G. P., and Aminian, K. (2018). Accurate estimation of running temporal parameters using foot-worn inertial sensors. Front. Physiol. 9, 610. doi:10.3389/fphys.2018.00610
Falbriard, M., Meyer, F., Mariani, B., Millet, G. P., and Aminian, K. (2020). Drift-free foot orientation estimation in running using wearable IMU. Front. Bioeng. Biotechnol. 8, 65. doi:10.3389/fbioe.2020.00065
Falbriard, M., Soltani, A., and Aminian, K. (2021). Running speed estimation using shoe-worn inertial sensors: Direct integration, linear, and personalized model. Front. Sports Act. Living 3, 585809. doi:10.3389/fspor.2021.585809
Farley, C. T., and Ferris, D. P. (1998). Biomechanics of walking and running: Center of mass movements to muscle action. Exerc. Sport Sci. Rev. 26, 253–286. doi:10.1249/00003677-199800260-00012
Ferraris, F., Grimaldi, U., and Parvis, M. (1995). Procedure for effortless in-field calibration of three-axial rate gyro and accelerometers. Senors Mater 7, 311–330.
Fohrmann, D., Mai, P., Ziolkowski, L., Mählich, D., Kurz, M., and Willwacher, S. (2019). Estimating whole-body mechanical power in running by means of simulated inertial sensor signals. ISBS Proc. Arch. 4.
Franklyn-Miller, A., Richter, C., King, E., Gore, S., Moran, K., Strike, S., et al. (2017). Athletic groin pain (part 2): A prospective cohort study on the biomechanical evaluation of change of direction identifies three clusters of movement patterns. Br. J. Sports Med. 51, 460–468. doi:10.1136/bjsports-2016-096050
García-Pinillos, F., Latorre-Román, P. Á., Roche-Seruendo, L. E., and García-Ramos, A. (2019). Prediction of power output at different running velocities through the two-point method with the StrydTM power meter. Gait Posture 68, 238–243. doi:10.1016/j.gaitpost.2018.11.037
Gholami, M., Napier, C., and Menon, C. (2020). Estimating lower extremity running gait kinematics with a single accelerometer: A deep learning approach. Sensors 20, 2939. doi:10.3390/s20102939
Grabowski, A. M., and Kram, R. (2008). Effects of velocity and weight support on ground reaction forces and metabolic power during running. J. Appl. Biomech. 24, 288–297. doi:10.1123/jab.24.3.288
Halilaj, E., Rajagopal, A., Fiterau, M., Hicks, J. L., Hastie, T. J., and Delp, S. L. (2018). Machine learning in human movement biomechanics: Best practices, common pitfalls, and new opportunities. J. Biomech. 81, 1–11. doi:10.1016/j.jbiomech.2018.09.009
Halson, S. L. (2014). Monitoring training load to understand fatigue in athletes. Sports Med. 44, 139–147. doi:10.1007/s40279-014-0253-z
Hastie, T., Friedman, J., and Tibshirani, R. (2008a). “Basis expansions and regularization,” in The elements of statistical learning: Data mining, inference, and prediction springer series in statistics. Editors T. Hastie, J. Friedman, and R. Tibshirani (New York, NY: Springer), 115–163.
Hastie, T., Friedman, J., and Tibshirani, R. (2008b). “Neural networks,” in The elements of statistical learning: Data mining, inference, and prediction springer series in statistics. Editors T. Hastie, J. Friedman, and R. Tibshirani (New York, NY: Springer), 347–369.
Heise, G. D., and Martin, P. E. (1998). “Leg spring” characteristics and the aerobic demand of running. Med. Sci. Sports Exerc. 30, 750–754. doi:10.1097/00005768-199805000-00017
Herren, R., Sparti, A., Aminian, K., and Schutz, Y. (1999). The prediction of speed and incline in outdoor running in humans using accelerometry. Med. Sci. Sports Exerc. 31, 1053–1059. doi:10.1097/00005768-199907000-00020
Hoenig, T., Rolvien, T., and Hollander, K. (2020). Footstrike patterns in runners: Concepts, classifications, techniques, and implicationsfor running-related injuries. Dtsch. Z. Für Sportmed. 71, 55–61. doi:10.5960/dzsm.2020.424
Imbach, F., Candau, R., Chailan, R., and Perrey, S. (2020). Validity of the Stryd power meter in measuring running parameters at submaximal speeds. Sports 8, 103. doi:10.3390/sports8070103
Jain, A., Nandakumar, K., and Ross, A. (2005). Score normalization in multimodal biometric systems. Pattern Recognit. 38, 2270–2285. doi:10.1016/j.patcog.2005.01.012
Jaskólski, A., Veenstra, B., Goossens, P., Jaskólska, A., and Skinner, J. S. (1996). Optimal resistance for maximal power during treadmill running. Sports Med. Train. Rehabil. 7, 17–30. doi:10.1080/15438629609512067
Jenny, D. F., and Jenny, P. (2020). On the mechanical power output required for human running – insight from an analytical model. J. Biomech. 110, 109948. doi:10.1016/j.jbiomech.2020.109948
Kammoun, N., Apte, A., Karami, H., and Aminian, K. (2022). “Estimation of temporal parameters during running with a wrist-worn inertial sensor: An in-field validation (accepted),” in 2022 44th Annual International Conference of the IEEE Engineering in Medicine Biology Society (EMBC), Glasgow, UK, July 11-15, 2022.
Kraskov, A., Stögbauer, H., and Grassberger, P. (2004). Estimating mutual information. Phys. Rev. E 69, 066138. doi:10.1103/PhysRevE.69.066138
Li, J., Cheng, K., Wang, S., Morstatter, F., Trevino, R. P., Tang, J., et al. (2017). Feature selection: A data perspective. ACM Comput. Surv. 50 (94), 1–45. doi:10.1145/3136625
Mai, P., and Willwacher, S. (2019). Effects of low-pass filter combinations on lower extremity joint moments in distance running. J. Biomech. 95, 109311. doi:10.1016/j.jbiomech.2019.08.005
Mann, R. A., and Hagy, J. (1980). Biomechanics of walking, running, and sprinting. Am. J. Sports Med. 8, 345–350. doi:10.1177/036354658000800510
Marcora, S. M., and Bosio, A. (2007). Effect of exercise-induced muscle damage on endurance running performance in humans. Scand. J. Med. Sci. Sports 17, 662–671. doi:10.1111/j.1600-0838.2006.00627.x
McGawley, K. (2017). The reliability and validity of a four-minute running time-trial in assessing [formula: See text]max and performance. Front. Physiol. 8, 270. doi:10.3389/fphys.2017.00270
Meyer, F., Falbriard, M., Aminian, K., and Millet, G. P. (2023). Vertical and leg stiffness modeling during running: Effect of speed and incline. Int. J. Sports Med. doi:10.1055/a-2044-4805
Moncada-Torres, A., Leuenberger, K., Gonzenbach, R., Luft, A., and Gassert, R. (2014). Activity classification based on inertial and barometric pressure sensors at different anatomical locations. Physiol. Meas. 35, 1245–1263. doi:10.1088/0967-3334/35/7/1245
Morgan, D. W., and Daniels, J. T. (1994). Relationship between V̇O2max and the aerobic demand of running in elite distance runners. Int. J. Sports Med. 15, 426–429. doi:10.1055/s-2007-1021082
Morin, J.-B., Dalleau, G., Kyröläinen, H., Jeannin, T., and Belli, A. (2005). A simple method for measuring stiffness during running. J. Appl. Biomech. 21, 167–180. doi:10.1123/JAB.21.2.167
Morin, J.-B., Jeannin, T., Chevallier, B., and Belli, A. (2006). Spring-mass model characteristics during sprint running: Correlation with performance and fatigue-induced changes. Int. J. Sports Med. 27, 158–165. doi:10.1055/s-2005-837569
Mulligan, M., Adam, G., and Emig, T. (2018). A minimal power model for human running performance. PLOS ONE 13, e0206645. doi:10.1371/journal.pone.0206645
Neugebauer, J. M., Collins, K. H., and Hawkins, D. A. (2014). Ground reaction force estimates from ActiGraph GT3X+ hip accelerations. PLOS ONE 9, e99023. doi:10.1371/journal.pone.0099023
Newson, R. (2002). Parameters behind “nonparametric” statistics: Kendall’s tau, somers’ D and median differences. Stata J. 2, 45–64. doi:10.1177/1536867X0200200103
Paquette, M. R., Napier, C., Willy, R. W., and Stellingwerff, T. (2020). Moving beyond weekly “distance”: Optimizing quantification of training load in runners. J. Orthop. Sports Phys. Ther. 50, 564–569. doi:10.2519/jospt.2020.9533
Passfield, L., Hopker, J. G., Jobson, S., Friel, D., and Zabala, M. (2017). Knowledge is power: Issues of measuring training and performance in cycling. J. Sports Sci. 35, 1426–1434. doi:10.1080/02640414.2016.1215504
Pes, B. (2020). Learning from high-dimensional biomedical datasets: The issue of class imbalance. IEEE Access 8, 13527–13540. doi:10.1109/ACCESS.2020.2966296
Prigent, G., Apte, S., Paraschiv-Ionescu, A., Besson, C., Gremeaux, V., and Aminian, K. (2022). Concurrent evolution of biomechanical and physiological parameters with running-induced acute fatigue. Front. Physiol. 74, 814172. doi:10.3389/fphys.2022.814172
Rabita, G., Dorel, S., Slawinski, J., Sàez-de-Villarreal, E., Couturier, A., Samozino, P., et al. (2015). Sprint mechanics in world-class athletes: A new insight into the limits of human locomotion. Scand. J. Med. Sci. Sports 25, 583–594. doi:10.1111/sms.12389
Richter, C., King, E., Strike, S., and Franklyn-Miller, A. (2019). Objective classification and scoring of movement deficiencies in patients with anterior cruciate ligament reconstruction. PLOS ONE 14, e0206024. doi:10.1371/journal.pone.0206024
Roberts, T. J., and Belliveau, R. A. (2005). Sources of mechanical power for uphill running in humans. J. Exp. Biol. 208, 1963–1970. doi:10.1242/jeb.01555
Selinger, J. C., Hicks, J. L., Jackson, R. W., Wall-Scheffler, C. M., Chang, D., and Delp, S. L. (2022). Running in the wild: Energetics explain ecological running speeds. Curr. Biol. 32, 2309–2315.e3. doi:10.1016/j.cub.2022.03.076
Taboga, P., Giovanelli, N., Spinazzè, E., Cuzzolin, F., Fedele, G., Zanuso, S., et al. (2021). Running power: Lab based vs. portable devices measurements and its relationship with aerobic power. Eur. J. Sport Sci. 0, 1555–1568. doi:10.1080/17461391.2021.1966104
Thorstensson, A., and Roberthson, H. (1987). Adaptations to changing speed in human locomotion: Speed of transition between walking and running. Acta Physiol. Scand. 131, 211–214. doi:10.1111/j.1748-1716.1987.tb08228.x
van der Kruk, E., van der Helm, F. C. T., Veeger, H. E. J., and Schwab, A. L. (2018). Power in sports: A literature review on the application, assumptions, and terminology of mechanical power in sport research. J. Biomech. 79, 1–14. doi:10.1016/j.jbiomech.2018.08.031
Vergara, J. R., and Estévez, P. A. (2014). A review of feature selection methods based on mutual information. Neural comput. Appl. 24, 175–186. doi:10.1007/s00521-013-1368-0
Vernillo, G., Giandolini, M., Edwards, W. B., Morin, J.-B., Samozino, P., Horvais, N., et al. (2017). Biomechanics and physiology of uphill and downhill running. Sports Med. 47, 615–629. doi:10.1007/s40279-016-0605-y
Vigotsky, A. D., Zelik, K. E., Lake, J., and Hinrichs, R. N. (2019). Mechanical misconceptions: Have we lost the “mechanics” in “sports biomechanics”. J. Biomech. 93, 1–5. doi:10.1016/j.jbiomech.2019.07.005
Wickler, S. J., Hoyt, D. F., Cogger, E. A., and Hirschbein, M. H. (2000). Preferred speed and cost of transport: The effect of incline. J. Exp. Biol. 203, 2195–2200. doi:10.1242/jeb.203.14.2195
Williams, K. R., and Cavanagh, P. R. (1987). Relationship between distance running mechanics, running economy, and performance. J. Appl. Physiol. 63, 1236–1245. doi:10.1152/jappl.1987.63.3.1236
Winter, E. M., Abt, G., Brookes, F. B. C., Challis, J. H., Fowler, N. E., Knudson, D. V., et al. (2016). Misuse of “power” and other mechanical terms in sport and exercise science research. J. Strength Cond. Res. 30, 292–300. doi:10.1519/JSC.0000000000001101
Wouda, F. J., Giuberti, M., Bellusci, G., Maartens, E., Reenalda, J., van Beijnum, B.-J. F., et al. (2018). Estimation of vertical ground reaction forces and sagittal knee kinematics during running using three inertial sensors. Front. Physiol. 9, 218. doi:10.3389/fphys.2018.00218
Xiang, L., Wang, A., Gu, Y., Zhao, L., Shim, V., and Fernandez, J. (2022). Recent machine learning progress in lower limb running biomechanics with wearable technology: A systematic review. Front. Neurorobotics 16, 913052. doi:10.3389/fnbot.2022.913052
Ye, H., Dong, K., and Gu, T. (2018). HiMeter: Telling you the height rather than the altitude. Sensors 18, 1712. doi:10.3390/s18061712
Yu, H., and Wilamowski, B. M. (2011). “Levenberg–marquardt training,” in Intelligent systems (Boca Raton, FL: CRC Press).
Zeni, J. A., Richards, J. G., and Higginson, J. S. (2008). Two simple methods for determining gait events during treadmill and overground walking using kinematic data. Gait Posture 27, 710–714. doi:10.1016/j.gaitpost.2007.07.007
Keywords: biomechanics, machine learning, wearable sensors, movement analysis, signal processing, quantitative feedback
Citation: Apte S, Falbriard M, Meyer F, Millet GP, Gremeaux V and Aminian K (2023) Estimation of horizontal running power using foot-worn inertial measurement units. Front. Bioeng. Biotechnol. 11:1167816. doi: 10.3389/fbioe.2023.1167816
Received: 17 February 2023; Accepted: 02 June 2023;
Published: 22 June 2023.
Edited by:
Craig McGowan, University of Southern California, United StatesReviewed by:
Joshua Bailey, University of Idaho, United StatesPaolo Taboga, California State University, Sacramento, United States
Copyright © 2023 Apte, Falbriard, Meyer, Millet, Gremeaux and Aminian. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Salil Apte, c2FsaWwuYXB0ZUBlcGZsLmNo