 Hezi Roda
Hezi Roda Amir B. Geva
Amir B. Geva- 1Electrical and Computer Engineering, Ben-Gurion University, Be'er Sheva, Israel
- 2InnerEye Ltd CTO, Herzliya, Israel
Active learning is a field of machine learning that seeks to find the most efficient labels to annotate with a given budget, particularly in cases where obtaining labeled data is expensive or infeasible. This is becoming increasingly important with the growing success of learning-based methods, which often require large amounts of labeled data. Computer vision is one area where active learning has shown promise in tasks such as image classification, semantic segmentation, and object detection. In this research, we propose a pool-based semi-supervised active learning method for image classification that takes advantage of both labeled and unlabeled data. Many active learning approaches do not utilize unlabeled data, but we believe that incorporating these data can improve performance. To address this issue, our method involves several steps. First, we cluster the latent space of a pre-trained convolutional autoencoder. Then, we use a proposed clustering contrastive loss to strengthen the latent space's clustering while using a small amount of labeled data. Finally, we query the samples with the highest uncertainty to annotate with an oracle. We repeat this process until the end of the given budget. Our method is effective when the number of annotated samples is small, and we have validated its effectiveness through experiments on benchmark datasets. Our empirical results demonstrate the power of our method for image classification tasks in accuracy terms.
1 Introduction
In recent years, computer vision has made significant advancements, primarily driven by machine learning and, more specifically, deep learning. However, these methodologies are highly dependent on having a substantial number of labeled samples. Acquiring such a large volume of data poses a significant challenge for several reasons. Initially, the process of annotating images is time-intensive, ranging from a few seconds for simple image classification to several hours for more complex image segmentation tasks. This makes it impractical to annotate a large data set in a short time frame. Additionally, image annotation often requires specialized expertise, adding another layer of complexity. In some cases, annotations require professionals, which increases the cost and complexity of the annotation process.
An effective strategy to address these issues involves employing an active learning methodology. Active Learning, often abbreviated as AL, entails the process of selecting and prioritizing data that require labeling to have the most significant impact on the training of a machine learning task. Through the utilization of AL, machine learning algorithms can enhance their accuracy using a reduced number of training labels, thereby economizing time and resources during model training. Settles (2009) provides a comprehensive overview of various AL techniques in machine learning. In essence, there are three primary scenarios where active learning can be beneficial for those seeking to maximize accuracy while minimizing the number of labeled instances, typically involving the submission of queries in the form of unlabeled data instances to be labeled by an oracle, such as a human annotator. These scenarios include membership query synthesis (Angluin, 1988), stream-based selective (Atlas et al., 1989) sampling, and pool-based sampling. In this research, we will be focused on the third scenario, pool-based sampling (Lewis, 1995).
In numerous practical scenarios, it is often straightforward to gather a substantial amount of unlabeled data, which serves as a driving force behind the adoption of the pool-based sampling method. Let us consider a pool of unlabeled data Pu alongside a limited quantity of labeled data Pl. In pool-based sampling in each query, we will sample a small amount of data from Pu and annotate it with human oracle, then add it to Pl. Assuming we have a good query that selects the most relevant samples from Pu, Pl will be a good representative group of Pu.
Employing a pool-based sampling active learning approach, where the model selects samples for annotation, can decrease the quantity of labeled data required to achieve a similar model accuracy. This represents a significant benefit of active learning for deep learning tasks, which has only recently started to be investigated (Gal et al., 2017; Sener and Savarese, 2017; Sinha et al., 2019).
As previously mentioned in numerous practical scenarios, there is a significant volume of unlabeled data, which motivate our study. In this research, we present a novel approach that utilizes pool-based active learning to fully exploit all unlabeled data. The method we suggest begins by clustering the unlabeled data in the latent space. Then, it proceeds to choose the samples with the highest entropy based on their representation in the latent space and the clustering within that space. Our central concept involves clustering the unlabeled data from Pu, querying samples with the highest entropy for human annotation, and employing labeled data from Pl to refine the clustering via our suggested clustering contrastive learning. The above process iterates until either a satisfactory level of accuracy is achieved, the model converges, or the annotation budget is exhausted.
In addition to addressing the challenges posed by limited labeled data, our research holds promise for real-world applications where unlabeled data is abundant. By leveraging a pool-based active learning approach, our method enables the effective utilization of unlabeled data in scenarios where acquiring labeled samples is impractical or costly, such as medical imaging diagnosis, satellite image analysis, and industrial inspection. This capability maximizes the efficiency and effectiveness of machine learning models in practical settings, facilitating improved accuracy and insights from limited labeled samples. Furthermore, our approach can identify and prioritize hard examples for labeling, ensuring that the annotated data provide the most informative training signal for the model.
The contributions of the research are:
• A new approach is proposed to integrate Deep Clustering and Deep Active Learning (DAL) in order to maximize the extraction of information from both labeled and unlabeled data.
• Propose a novel contrastive clustering loss (CCL) that has the potential to enhance the transition from unsupervised clustering to a semi-supervised framework.
• Achieving a high level of accuracy in image classification with a reduced number of labeled samples.
2 Previous work
2.1 Deep clustering
There has been significant research on deep clustering in recent years. Most deep clustering algorithms can be categorized into two groups. The first group includes two-stage clustering algorithms that first generate a data representation before applying clustering. These algorithms leverage existing unsupervised deep learning frameworks and techniques. For instance, Tian et al. (2014) and Peng et al. (2016) utilize autoencoders to learn low-dimensional features of original data samples and subsequently apply conventional clustering algorithms like k-means to the learned representations. Mukherjee et al. (2019) introduces ClusterGAN a generative adversarial network that clusters the latent space by sampling latent variables from a combination of one-hot encoded variables and continuous latent variables. The second group comprises approaches that simultaneously optimize feature learning and clustering. These algorithms aim to explicitly define a clustering loss, resembling the classification error in supervised deep learning. Yang et al. (2016) propose a recurrent framework that integrates feature learning and clustering into a unified model with a weighted triplet loss, optimizing it end-to-end. Xie et al. (2016) suggests a clustering loss that operates on the latent space of an autoencoder, enabling the simultaneous acquisition of feature representations and cluster assignments. Building upon this, Guo et al. (2017) DCEC (Deep Clustering with Convolutional Autoencoders) enhances the method by proposing Convolutional Autoencoders (CAE), which surpasses DEC while ensuring the preservation of local structure. This study directly adopts the clustering loss and clustering layer from DCEC.
We briefly review their definitions:
The trainable parameters of the clustering layer are which represent the cluster center. The intuition behind the math operation of that layer is it maps each embedded point in the latent space zi into a soft label qi by the student's t-distribution (Van der Maaten and Hinton, 2008).
Where qij is the jth entry of qi, representing the probability of zi belonging to cluster j.
The clustering loss is defined as:
where P is the target distribution, defined as:
2.2 Active learning
Active learning is a subfield of machine learning empowering algorithms to select and prioritize the most informative data points for labeling, aiming to enhance model performance using less training data. Active learning scenarios commonly occur in three main contexts:
1. Membership Query Synthesis: In this scenario (Angluin, 1988), the learner synthesizes new instances to be labeled by an oracle, aiming to generate maximally informative instances, particularly beneficial when labeled data is scarce or expensive to obtain. 2. Stream-Based Selective Sampling: This scenario (Atlas et al., 1989) involves a continuous stream of unlabeled instances, with the learner making real-time decisions on which instances to label based on the current model state and incoming data. Such scenarios are common in sequential data streams like online learning or sensor data. 3. Pool-Based Sampling: Here (Lewis and Gale, 1994), the learner is presented with a fixed pool of unlabeled instances and selects a subset for labeling, aiming to identify the most informative instances. This approach involves evaluating the informativeness of unlabeled samples, often utilizing query strategies like uncertainty sampling (Lewis and Gale, 1994), recently Liu and Li (2023) had an extensive work to explain this strategy even further, or query-by-committee (Seung et al., 1992). Active learning plays a crucial role in determining which data should be labeled to maximize the effectiveness of training supervised models. Traditional active learning methods are comprehensively reviewed by Settles (2009), while Ren et al. (2021) offer insights into the more contemporary Deep Active Learning (DAL) approach, integrating active learning with deep learning methodologies.
Notable active learning methodologies are Uncertainty Sampling (Lewis and Gale, 1994) and Variational Adversarial Active Learning (VAAL) (Sinha et al., 2019). VAAL integrates variational inference and adversarial training, leveraging a generator network to produce informative data points and a discriminator network to differentiate between real and generated instances, aiding in sample selection. Additionally, LADA (Kim et al., 2021) introduces data augmentation techniques to improve the efficiency of data acquisition in deep active learning, while SRAAL (Zhang et al., 2020) integrates adversarial training techniques with active learning principles to address sample selection challenges.
Moreover, approaches like the Core-Set Approach (Sener and Savarese, 2017) and Bayesian Active Learning (BALD) (Houlsby et al., 2011) offer strategies for selecting informative instances, with Core-Set identifying a compact, diverse subset of unlabeled data, and BALD leveraging Bayesian inference for strategic instance selection. These methodologies collectively contribute to enhancing model training efficiency and performance in active learning settings.
2.3 Semi-supervised learning
Semi-supervised learning (SSL) is a specialized form of supervised learning that involves training on a small set of labeled data along with a large set of unlabeled data. Positioned between supervised and unsupervised learning, SSL is commonly used in scenarios where the availability of labeled data is limited due to constraints such as budgetary restrictions or data ambiguity, where the class of a sample is uncertain. Semi-supervised algorithms are designed to address such challenges. In this study, we propose an SSL approach for the classification of image data, aiming to leverage the benefits of both active learning (AL) and SSL. To achieve this, we suggested clustering contrastive loss (CCL) in conjunction with unsupervised training.
2.4 Entropy
Entropy Shannon (1948) is an information-theoretic measure of uncertainty. It quantifies the amount of information needed to encode a distribution. In active learning, entropy is widely used to select the most uncertain or ambiguous samples for annotation. The entropy can be shown as:
3 Method
This study proposes a novel active learning approach based on pool-based sampling. It involves training a convolutional autoencoder (CAE) (Masci et al., 2011) to learn a low-dimensional latent space for both labeled and unlabeled samples. The latent space is then clustered using a clustering layer. After each iteration of the active learning process, a subset of data points associated with the latent space vectors is selected for annotation. To leverage information from the labeled data, the study introduces the contrastive clustering loss (CCL), which is a modified version of the contrastive loss (Chopra et al., 2005). The CCL operates on the latent space vectors, pulling samples of the same class toward their respective cluster centers and pushing samples of different classes apart.
3.1 Problem definition and notation
The main focus of this study is a semi-supervised active learning approach designed for image classification. Assuming there is a large set of unlabeled images Pu and a small set of labeled images Pl, along with a predetermined annotation budget, the goal is to select the most informative samples from the unlabeled set Pu to enhance the classification accuracy. These selected samples will be labeled by a human annotator and incorporated into the labeled set Pl. The initial step involves training a Convolutional Autoencoder (CAE) to learn a condensed representation of the images, referred to as latent space features. Each image i is transformed by the CAE into a feature vector zi in the latent space. Subsequently, all latent space features zi, ∀i∈Pl∪Pu are clustered into clusters, denoted as μj where j represents the centroid of the j−th cluster. Finally, the proposed cluster contrastive loss Lccl (see Eq. 7) is applied to the labeled samples zl, ∀l∈Pl. This loss function aims to attract the feature vectors zj toward μj while pushing them away from μn ∀n≠j. for all n≠j.
3.2 Suggested method
The primary objective of this study is image classification, aiming to categorize images into their respective classes with optimal accuracy by leveraging labeled images from the restricted labeled data pool Pl. To achieve this, we introduce a pool-based active learning strategy that integrates contrastive learning and clustering, mutually enhancing their performance in every training cycle. Our approach follows a human-in-the-loop methodology, in which an active learning loop comprises model training, image quering, and annotation by an oracle. This iterative process continues until the budget is fully utilized.
The model consists of a CAE (Masci et al., 2011) and a clustering layer (Xie et al., 2016). Samples from Pl and Pu are fed into the model based on the active learning training stage. During each iteration of the active learning process, samples from Pu are chosen for labeling. The proposed module is depicted in Figure 1.
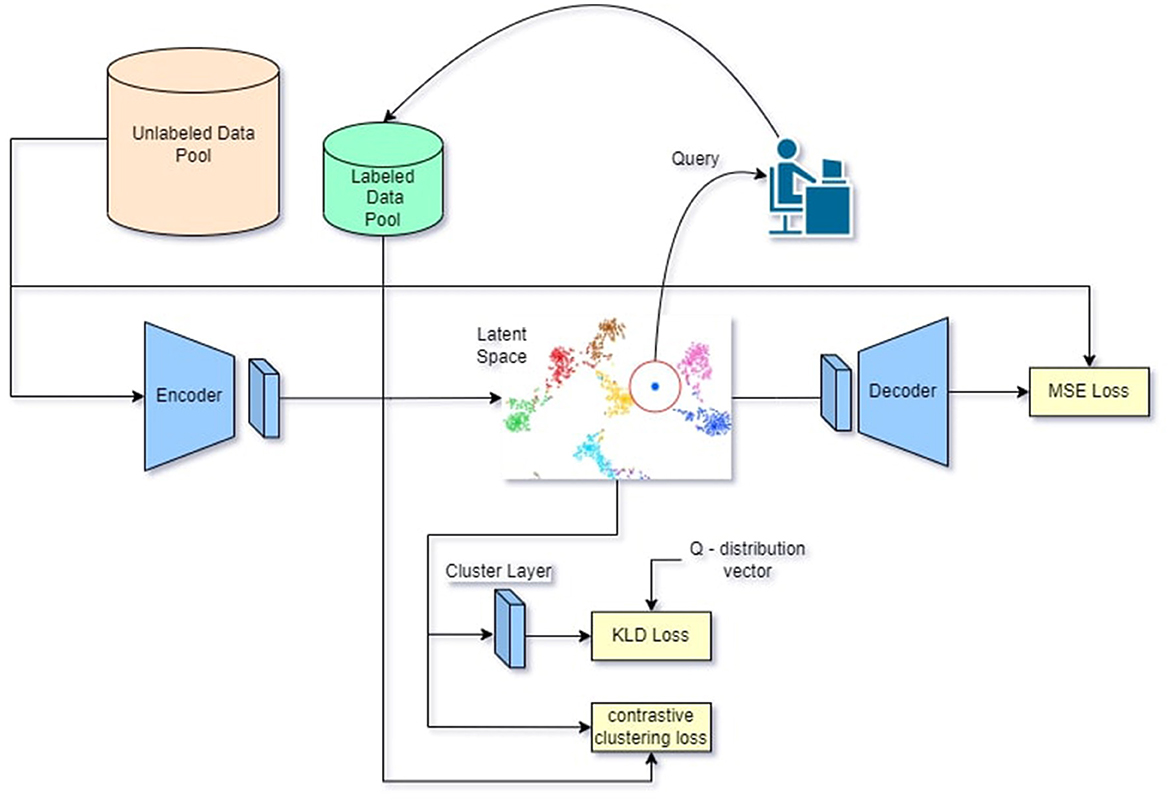
Figure 1. Visual representation of proposed methodology. Images from pl and pu are inferred through the CAE and provide feature vectors in the latent space the feature vectors are clustered by the clustering layer and the contrastive clustering loss then the n-th feature vectors from the latent space with the highest entropy are queried and annotated by a human oracle this process is repeated until the end of the annotation budget or model convergance.
Prior to commencing the active learning iteration, certain initial steps are carried out. Initially, our CAE is pre-trained by reconstructing images from Pu and Pl using the MSE loss (Eq. 5). This process allows the CAE to acquire knowledge of lower-dimensional features within the dataset. Once the network is trained, the resulting latent space provides a feature zi∀i∈pi∪pl. Subsequently, the cluster centroids in the clustering layer are initialized with the average values of the vectors in the latent space of each class in our labeled pool Pl as depicted in Eq. 6.
Next, we incorporate clustering into the training of the CAE by clustering the acquired latent space with the utilization of a clustering layer (Guo et al., 2017) and employing a Kullback-Leibler divergence loss (Csiszár, 1975) as shown in Eq. 2. The primary objective of this stage is to organize the latent space into clusters, ensuring that similar image pairs produce proximate feature vectors within the latent space.
In the final stage, we incorporate the image labels from Pl. To utilize these labels effectively, we employ the suggested cluster contrastive loss Lccl as shown in Eq. 7 on all vectors in the latent space derived from Pl, meaning that solely annotated images are taken into account by this loss. The CCL loss works by either pulling or pushing the feature vectors Zi in the latent space toward their respective cluster center μi, or away from other cluster centers μj where j≠i. This method allows us to enhance the purity of clusters while using a limited number of labeled images from Pl, during this stage we continue to make use of the previous clustering stage. Finally, we add all those losses and update the parameters of the model. The process is reiterated until reaching convergence or utilizing the entire annotation budget.
At the end of every active learning iteration, we perform query sampling to choose the n-th image that exhibits features with the highest entropy compared to all other clusters. These features are the most ambiguous in terms of their cluster assignment, and by labeling them, we gain valuable insights that the model failed to generalize. Algorithm 1 presents a generic pseudo-code for this approach, in Table 1 the symbols used in the algorithm are elucidated, providing clarity on their respective meanings and roles within the context of the algorithm.
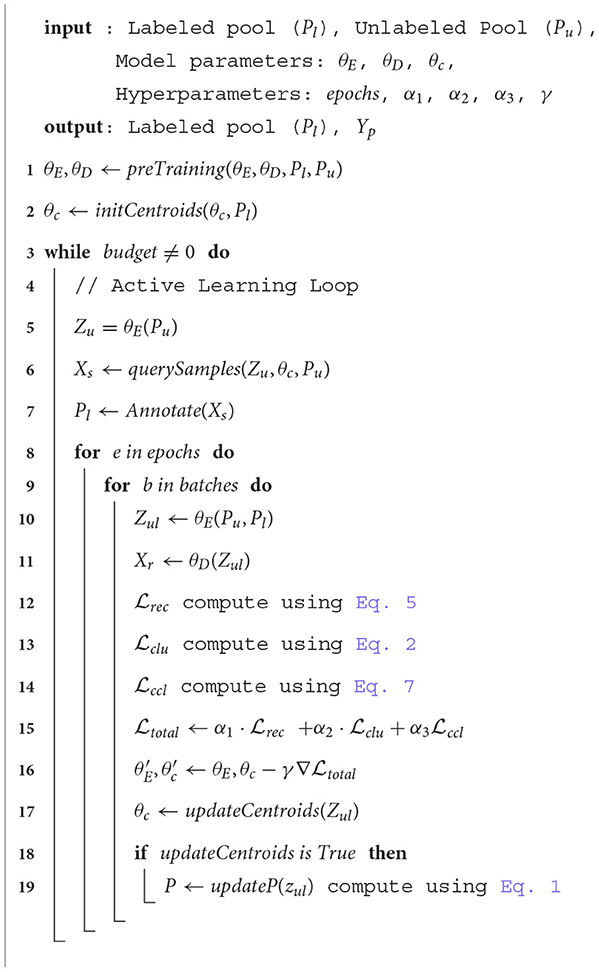
Algorithm 1. Contrastive active learning.
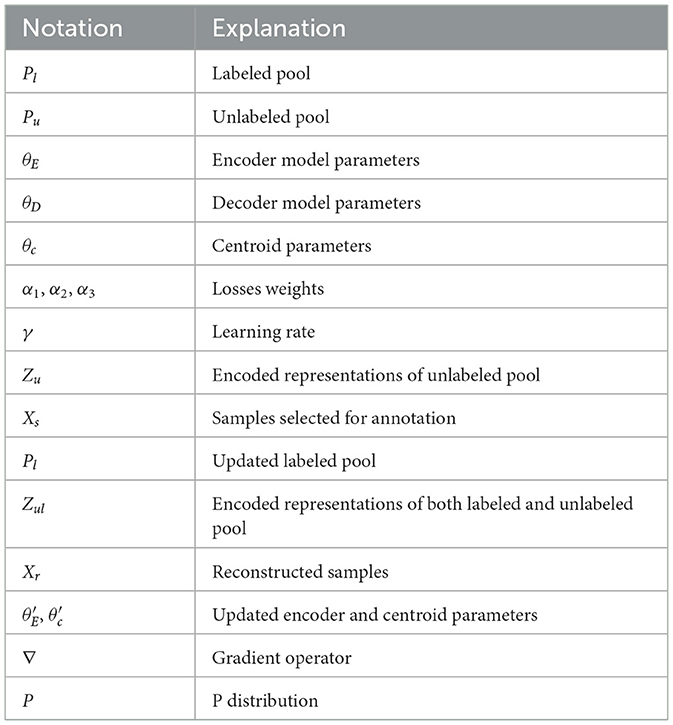
Algorithm symbols and their explanations.
3.2.1 Cluster contrastive loss
The cluster contrastive loss (CCL) is a revised variant of the supervised contrastive loss introduced in Khosla et al. (2020). To enhance the purity of the clusters, the proposed approach incorporates the labeled images from Pl into the clustering procedure. Consequently, this results in the adoption of the proposed CCL. The mathematical expression for the CCL is displayed below:
Where c∈C is the class index, Ic is the set of all the samples indexes in class c, is the set of all the samples indexes in all the classes beside class c. zi is the i-th sample in the latent space and μ is the center of the cluster, τ∈R+ is a scalar temperature parameter. An intuition of the loss can be shown in Figure 2.
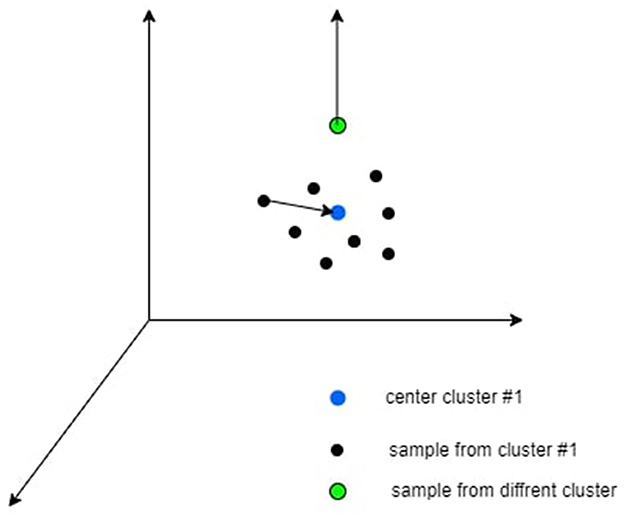
Figure 2. An intuitive explanation of the contrastive clustering loss is that the black dots correspond to samples assigned to cluster #1, the blue dot symbolizes the cluster center, and the green dot represents a sample from a different cluster. This loss function aims to move the black dots closer to the blue dot while pushing the green dot farther away from the blue dot.
This loss involves both pulling samples toward their cluster center and pushing from other unmatched centroids centers simultaneously. It specifically affects the labeled data points. The CCL serves as a complementary approach to the unsupervised methods we currently employ, and empirical experiments indicate their mutual benefit. Figure 2 provides a visual representation of CCL as defined in Eq. 7.
3.2.2 The need for the contrastive clustering loss
During the training for CAE, we are provided with representation vectors in the latent space. In order to group the latent space into clusters corresponding to each class, as elaborated in Section 2.1, the clustering layer is utilized. This layer aims to streamline the process of image classification. Nevertheless, the clustering mechanism is proficient in grouping vectors with high certainty, which may result in certain images not being grouped together, particularly those from the same class that map to distant vectors in the latent space. Therefore, the integration of the suggested contrastive clustering loss becomes essential. This suggested CCL loss function works on adjusting vectors that were not properly aligned by the clustering process. Through this loss function, we can enhance the separation of classes in the latent space, even when dealing with a limited number of labeled images or when images are challenging to cluster due to the low confidence in the P-distribution of the clustering process.
3.2.3 Pre-training
During the initial phase, we train the convolutional autoencoder. We are using all the images from the unlabeled data pool Pu and the labeled data pool Pl. Each image xi~Pl∪Pu inferences through the encoder and provides zi a lower dimension latent vector zi = σ(xi*W)) where w is the weights of the encoder layers, σ is a nonlinear activation function, and * is a convolution operation. The latent vector zi is inference through the decoder which provides an which is a reconstruction of the original image xi. where U is the weight for the decoder. and xi are entered to MSE loss (Eq. 5) which provides a high loss when xi looks different from and a low loss when they are similar. At the end of this step, the CAE has trained weights W and U.
3.2.4 Initialization and update centroids
Once the CNN is pre-trained, the centroids in the clustering layer are initialized using the average value of each class projection from Pl in the latent space. Subsequently, every 80 iterations, the distribution of P is updated by the following (Eq. 3). As detailed in Section 2.1, the centroids represent the weights of the clustering layer, and therefore they are adjusted during each training iteration.
3.2.5 Query samples
In this stage, our objective is to acquire image annotations by engaging a human annotator in the active learning procedure. At this point, we have already acquired a clustered latent space generated by the model itself. Any vectors within the latent space that are not clustered or are distant from the cluster center are identified as hard examples, representing images that require annotation. We select samples linked to vectors in the latent space that do not clearly belong to any cluster and annotate them based on the uncertainty criterion detailed in Eq. 4. More specifically, we target the vectors that exhibit the highest entropy in the cluster distribution. A visual representation of this approach is shown in Figure 3. By focusing on a small number of samples associated with feature vectors located far from the cluster center, we gain insight into these samples and the clusters they are associated with, thereby enhancing the overall clustering process.
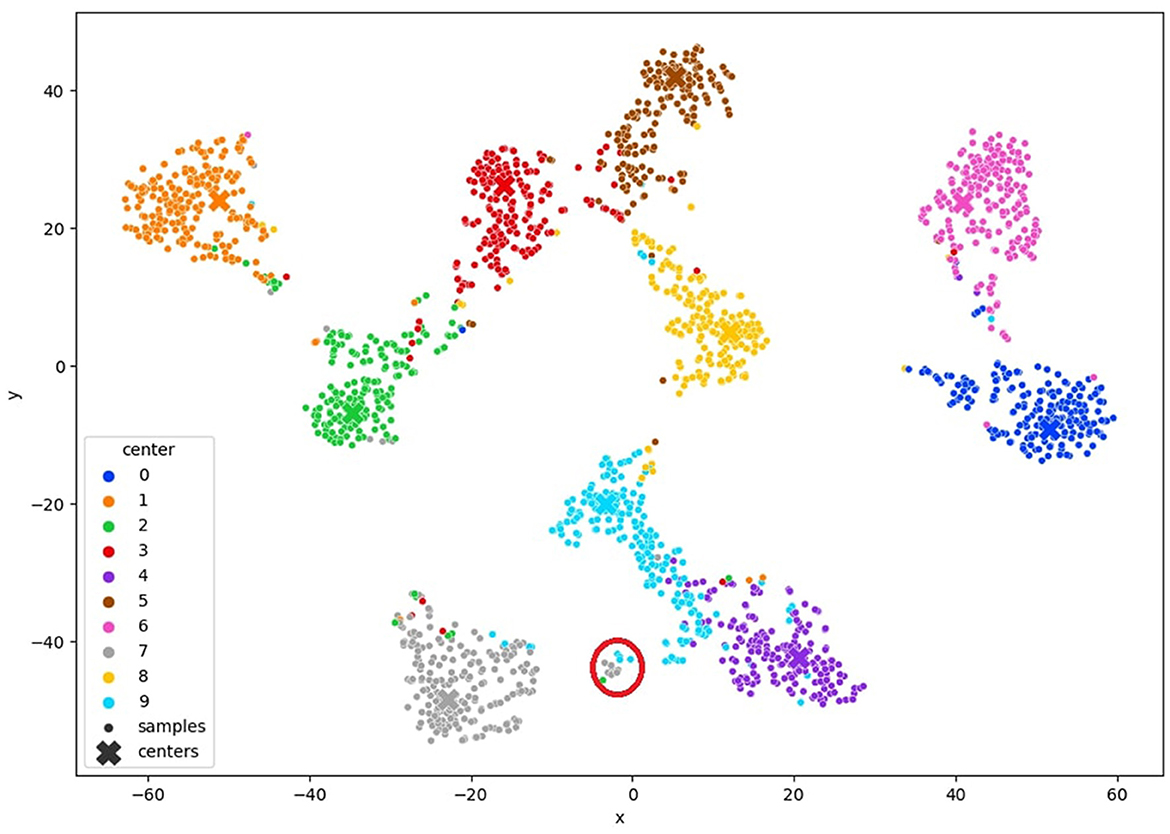
Figure 3. TSNE visualization of the query method the red circle represents samples with high entropy.
3.3 Combination of contrastive learning and clustering
When the suggested clustering method is applied to the latent space, there may be instances where some feature vectors are not accurately clustered. This situation can arise when feature vectors within the latent space that should belong to the same cluster are spatially distant from each other. As a result, the clustering layer may encounter challenges in grouping these feature vectors effectively. To address this issue, we introduce our proposed CCL, which works to minimize the distance between distant feature vectors that belong to the same cluster while maximizing the separation between those that do not. Furthermore, we incorporate a query mechanism to select challenging examples (i.e., samples that are significantly distant from their corresponding cluster center) for manual annotation. By integrating these strategies and progressively bringing the feature vectors closer together in a semi-supervised fashion, followed by clustering using the clustering layer, we improve the purity of the clustering outcomes.
3.4 Implementation details
In this work, we used a convolutional autoencoder for our model. The encoder consists of 3 convolutional layers, a batch normalization layer, and a linear embedding layer with a size of 10. The decoder consists of a linear de-embedding layer, 3 deconvolutional layers, and a batch normalization layer. The clustering layer weights are initialized with the mean of the latent space clusters using the starting labeled images in Pl, and are then updated with the kl-loss using the Q and P distribution as described earlier. The P-distribution, or target distribution, is initialized every 80 steps. Each benchmark dataset is split into a 20% validation set and 80% training set, which is further divided into two data pools: a labeled data pool Pl and an unlabeled data pool Pu. First, we pre-trained the model for 50 epochs. Then each active learning training iteration was set to 10 epochs and for the duration of overall 20 active learning loops. In each active learning loop, we query 250 image samples using the uncertainty strategy for annotation.
4 Experiments and results
4.1 Datasets
We have evaluated our method in image classification tasks. We have used MNIST (LeCun, 1998), FashionMNIST (Xiao et al., 2017), and USPS (Hull, 1994) datasets. Both the MNIST and the FashionMNIST datasets have 60K grayscale images of size 28x28. Examples of MNIST and FashionMNIST datasets can be viewed at Figure 4, and USPS has 9298 grayscale images of 16x16 size. An example of USPS dataset can be viewed at Figure 5.

Figure 4. Visualization of MNIST and FashionMNIST datasets at the left is the FashionMNIST and on the right is the MNIST dataset.
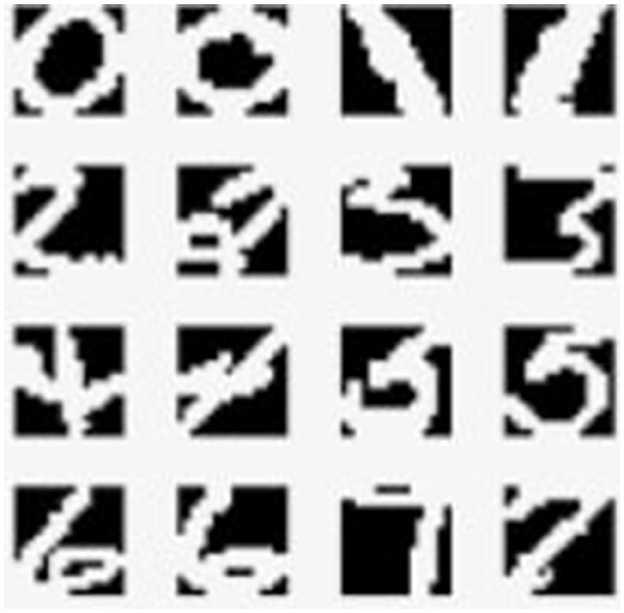
Figure 5. Visualization of the USPS dataset.
4.2 Performance measurement
We evaluate the performance of our method with the image classification task by measuring the accuracy over different amounts of labeled images from 500 to 5k images with a raising of 250 images from query to query. The results of all our experiments are averaged over 3 runs.
4.3 Experiments details
We begin our experiments with an initial labeled pool of the size of 250 and in each iteration of the training loop we provided another 250 images that were annotated by the human oracle and added to the initial labeled pool Pl. Training is repeated on the new training set with the new labeled images. We assume that the dataset is balanced and the oracle annotations are ideal.
In Figure 6 MNIST result. In Figure 7 FashionMNIST result.
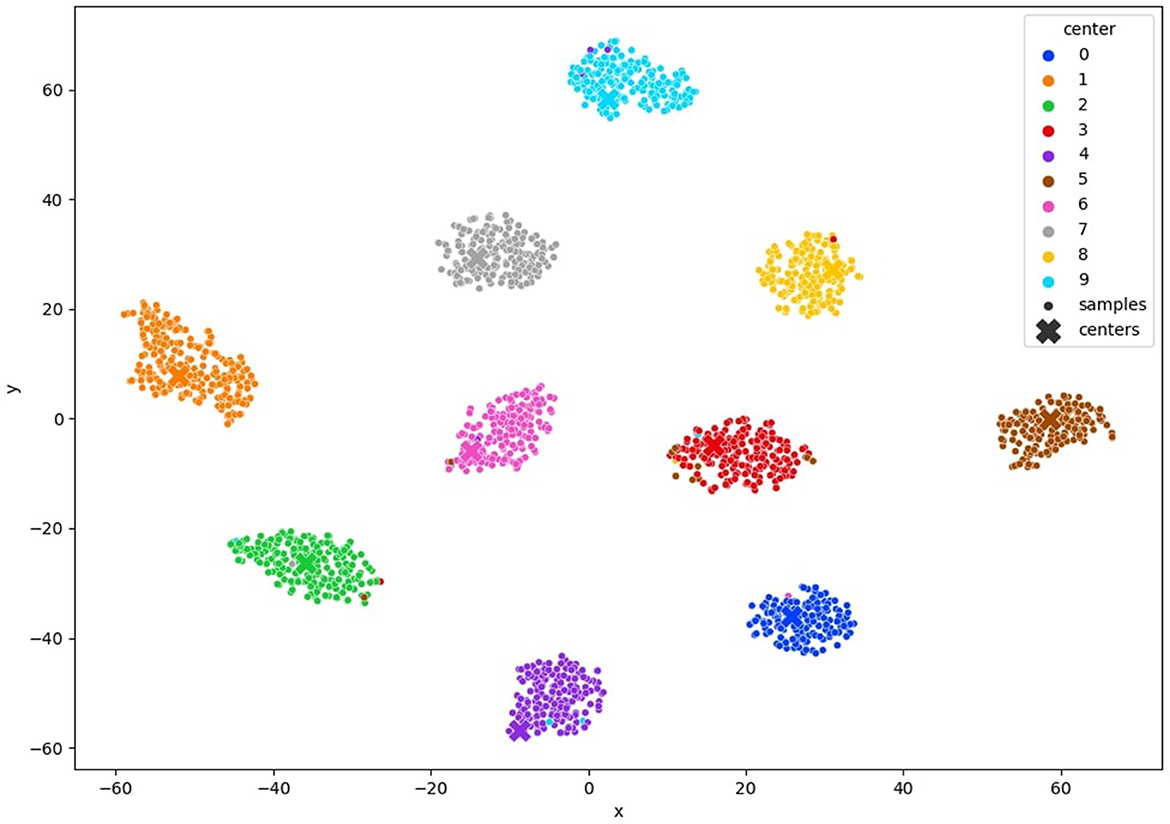
Figure 6. TSNE visualization of the clustered MNIST latent space after convergence of our method with 10% of annotated samples.
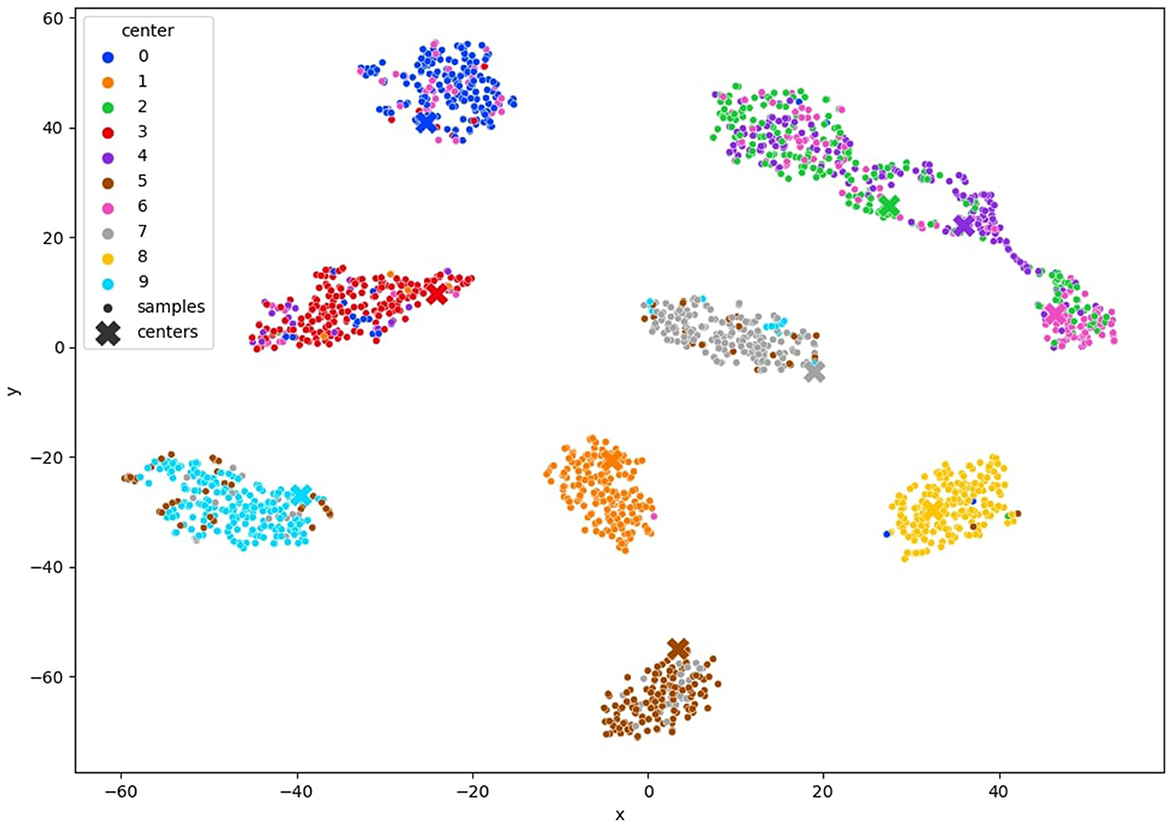
Figure 7. TSNE visualization of the clustered FashionMNIST latent space after convergence of our method with 10% of annotated samples.
4.4 Effectiveness of the CCL
In Table 2, we present an ablation study comparing our proposed method with the use of clustering alone. The study evaluates the performance of both approaches on the Mnist and USPS datasets. The results demonstrate that integrating the CCL with clustering, using only 3% of labeled data, significantly improves model performance. The CCL operates by encouraging the model to learn discriminative representations within clusters while simultaneously enforcing compactness among cluster centroids. By incorporating this loss function into our framework, we guide the clustering process to yield clusters that not only capture inherent data structures but also ensure inter-class separability. This results in more coherent and well-separated clusters, facilitating better decision boundaries and ultimately leading to improved classification accuracy. Additionally, Figure 8 visually illustrates the difference between using clustering alone and incorporating the CCL into the clustering process.
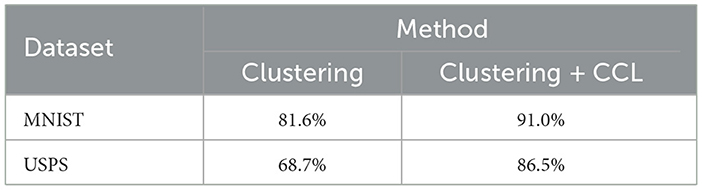
Table 2. Ablation study: clustering vs. clustering + CCL (3% of annotated data).
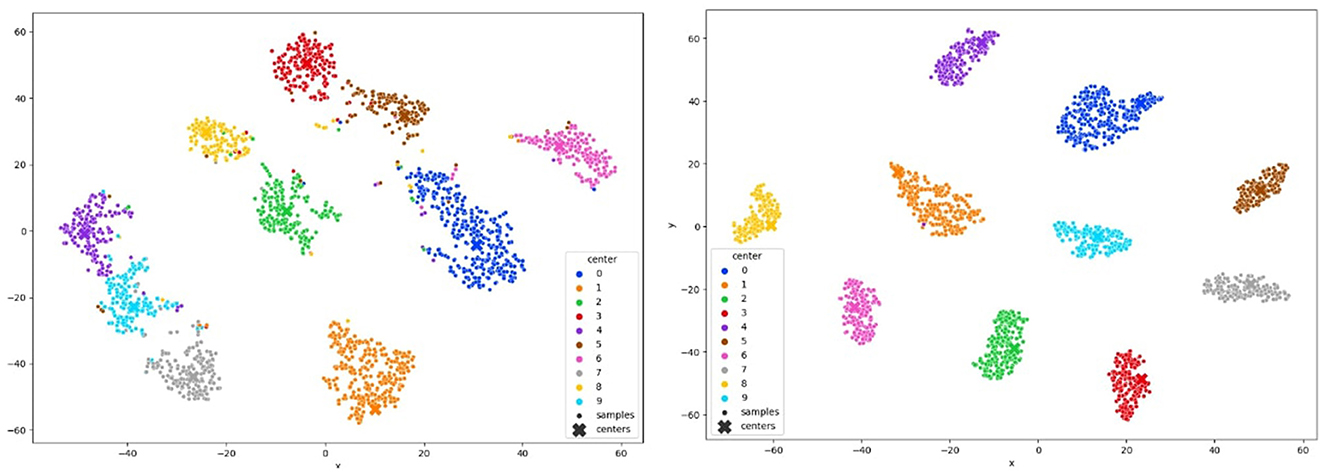
Figure 8. On the left: t-SNE visualization after clustering. On the right: t-SNE visualization after applying CCL in conjunction with clustering.
4.5 Comparing with other methods
We conducted a comprehensive evaluation of our proposed method across multiple datasets, including MNIST, FashionMNIST, and USPS, as detailed in Tables 3–5. Our results showcase significant performance improvements over baseline methods, particularly evident in scenarios with limited labeled data. When compared to state-of-the-art techniques such as Core-Set Approach (Sener and Savarese, 2017), Variational Adversarial Active Learning (VAAL) (Sinha et al., 2019), and Bayesian Active Learning by Disagreement (BALD) (Houlsby et al., 2011), our approach consistently demonstrates competitive performance. Figures 9–11 showing our method comparing to the others (Notably, leveraging pre-trained) Notably, leveraging pre-trained clustering models contributes to achieving relatively high accuracy, particularly in scenarios with a scarcity of labeled samples.

Table 3. MNIST accuracy results on entropy sampling (Wang and Shang, 2014) BALD (Gal et al., 2017) Vaal (Sinha et al., 2019) Core-set (Sener and Savarese, 2017) and our method with 1, 3, 5, and 10% of the data labeled.

Table 4. Fashion MNIST accuracy results on entropy sampling (Wang and Shang, 2014) BALD (Gal et al., 2017) Vaal (Sinha et al., 2019) Core-set (Sener and Savarese, 2017) and our method with 1, 3, 5, and 10% of the data labeled.

Table 5. USPS accuracy results on entropy sampling (Wang and Shang, 2014) BALD (Gal et al., 2017) Vaal (Sinha et al., 2019) random sampling and our method with 3, 5, and 10% of the data labeled.
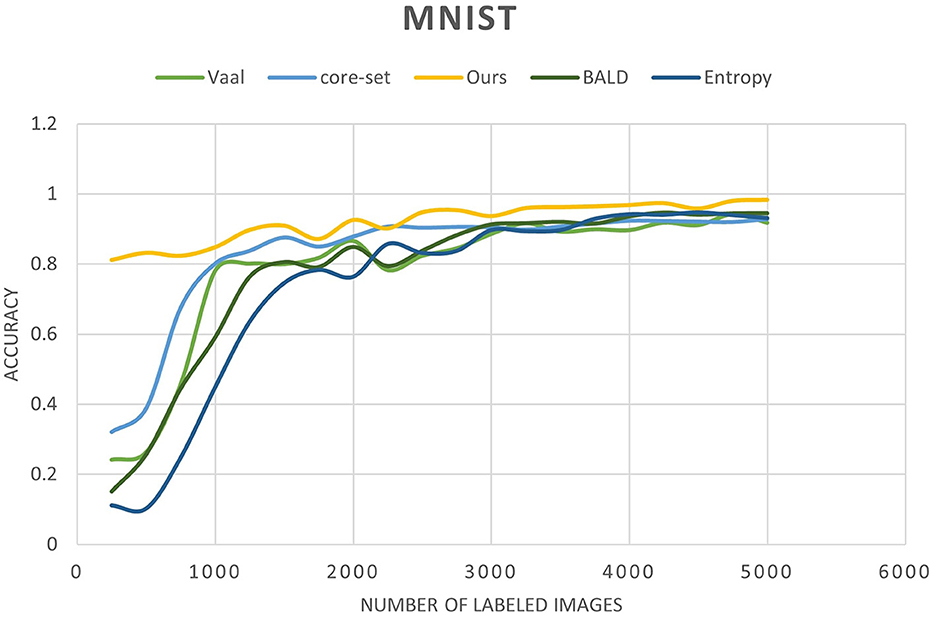
Figure 9. Accuracy of our method compared to other state-of-the-art methods as a function of the number of labeled images for the MNIST dataset.
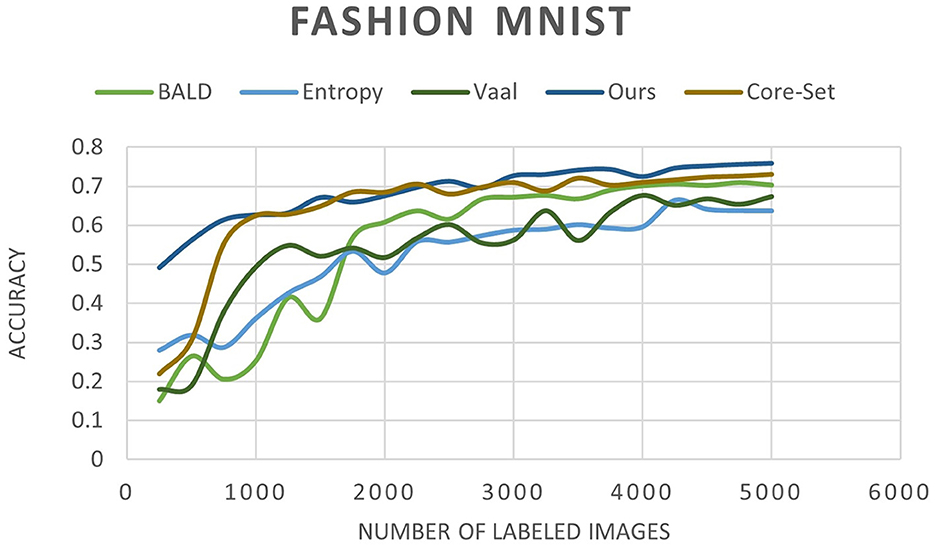
Figure 10. Accuracy of our method compared to other state-of-the-art methods as a function of the number of labeled images for the FashionMNIST dataset.
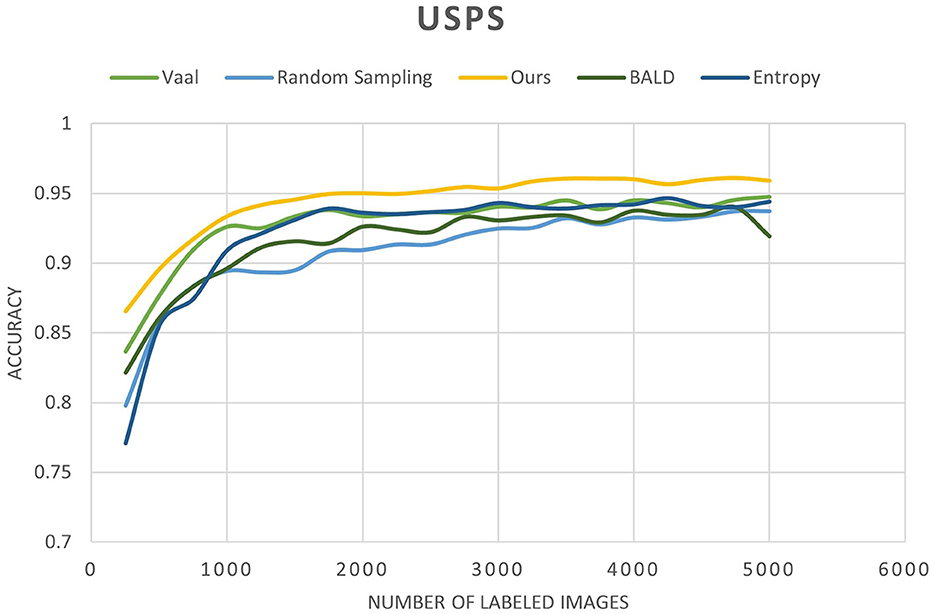
Figure 11. Accuracy of our method compared to other state-of-the-art methods as a function of the number of labeled images for the USPS dataset.
4.6 Experiment analysis
To comprehensively validate the efficacy of our approach, we conducted an in-depth analysis of clustering quality throughout the training process. We monitored the evolution of clustering performance and visualized the t-SNE projections of learned latent space representations, as depicted in Figures 6, 7, 12. These visualizations offer insights into the structure of the learned representations, revealing distinct clusters corresponding to each class. The observed trends in clustering align well with the accuracy improvements reported in Tables 3–5, corroborating the effectiveness of our method.
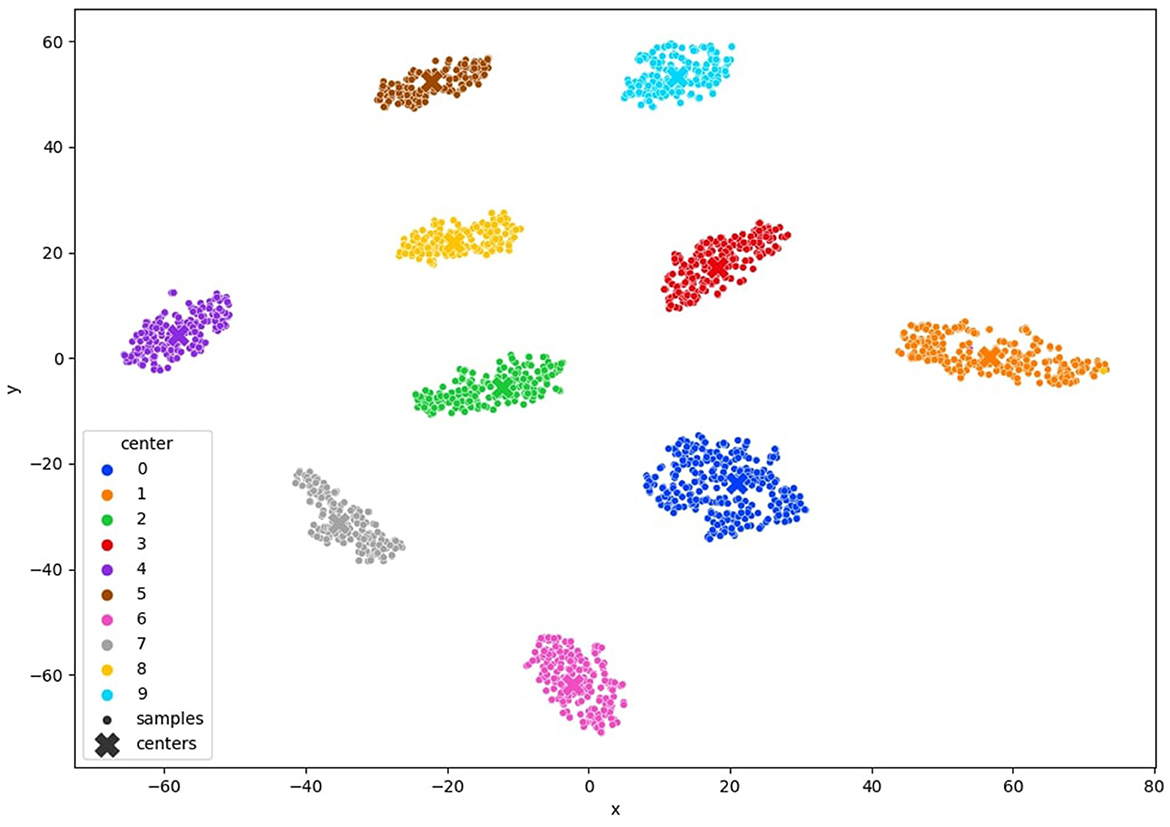
Figure 12. TSNE visualization of the clustered USPS latent space after convergence of our method with 10% of annotated samples.
In addition to accuracy comparisons, it's imperative to delve deeper into the performance metrics of our approach compared to baseline methods. For instance, on the MNIST dataset, our method achieves an accuracy of 91% with only 3% labeled data, outperforming the Core-Set Approach, which attains 80.5% accuracy. This notable performance gain underscores the superiority of our method in leveraging limited labeled data effectively.
5 Discussion
The integration of convolutional autoencoders, clustering, and a novel clustering contrastive loss in our semi-supervised active learning approach presents a unique and promising strategy for leveraging both labeled and unlabeled data in image classification tasks. By combining clustering with active learning, our method offers a distinctive approach that distinguishes it from previous methodologies.
A significant strength of our approach lies in its ability to extract valuable insights from unlabeled data by organizing it into clusters, thereby guiding the query selection process in active learning. However, the effectiveness of our method may depend on the quality of clustering initialization, which could potentially limit performance, particularly in scenarios involving complex, high-dimensional data. Exploring the applicability of our approach beyond image classification domains warrants further investigation.
Despite these potential limitations, our research represents a notable advancement in the realm of semi-supervised active learning. By integrating deep clustering, active learning, and contrastive learning principles, we address challenges associated with data scarcity, thereby enhancing model performance in resource-constrained settings. Moving forward, future research endeavors could explore the development of more robust clustering techniques, alternative representation learning methods, and synergistic combinations with other active learning strategies to further enhance performance and generalization capabilities.
Theoretically, the clustered representations derived by our approach hold promise for facilitating various downstream tasks, including data augmentation, domain adaptation, and the incorporation of weak or noisy labels. Such capabilities could prove invaluable in addressing the challenges posed by limited annotation scenarios. While our work contributes to the field, it also underscores the inherent challenges and opportunities associated with semi-supervised learning in real-world applications, paving the way for continued advancements and innovation in this domain.
It is essential to acknowledge the use of a smaller model architecture in our experiments. The complexity introduced by clustering necessitated the use of a smaller model to maintain tractability and computational efficiency. While this choice may have influenced our absolute performance metrics, it enabled us to explore the feasibility and efficacy of our approach within practical constraints. It is plausible that in subsequent studies, researchers may employ larger, more complex models to further improve performance.
6 Conclusions and future work
In this study, we have introduced a novel approach to image classification through a pool-based semi-supervised active learning technique. By integrating deep clustering and deep active learning, we aim to enhance classification accuracy by using fewer labeled images. Our method involves clustering feature vectors in the latent space that corresponds to images from Pl and Pu, thereby obtaining a more informative representation of the latent space to support the active learning procedure. We have also incorporated a clustering contrastive loss to enhance the clustering of the latent space even with a limited number of labeled images. Cases where feature vectors in the latent space are not well grouped together or are far from their respective cluster centers are recognized as hard examples and are then queried for annotation by a human oracle.
Our empirical experiments demonstrated that our method achieves high classification accuracy even with a small number of annotations. The iterative combination of clustering with the suggested contrastive learning and query method leads to a more separated latent space, which in turn facilitates the classification process. Thanks to the clustering step, our method achieves high accuracy from the beginning. However, the clustering step may have a drawback for complicated datasets, as it can be challenging to cluster them effectively. We believe that future work can improve the clustering process to provide better clustering initialization even for complex datasets.
We used a convolutional autoencoder (CAE) to map samples to the latent space, but future work could explore more robust methods like a variational autoencoder that creates smoother and more connected latent spaces, which will help to improve clustering. Furthermore, our method is currently designed for image classification tasks, but it could be extended to other computer vision tasks such as semantic segmentation and object detection by inserting a suitable network head to the model for the requested task.
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
HR: Conceptualization, Data curation, Investigation, Methodology, Resources, Software, Visualization, Writing—original draft, Writing—review & editing. AG: Conceptualization, Supervision, Validation, Writing—original draft, Writing—review & editing.
Funding
The authors declare that financial support was received for the research, authorship, and/or publication of this article. The publication fee for this paper was paid by InnerEye Ltd. The funder was not involved in the study design, collection, analysis, interpretation of data, the writing of this article, or the decision to submit it for publication.
Conflict of interest
AB was employed by InnerEye Ltd CTO.
The remaining author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher's note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Atlas, L., Cohn, D., and Ladner, R. (1989). “Training connectionist networks with queries and selective sampling,” in Advances in Neural Information Processing Systems, 2 (NIPS).
Chopra, S., Hadsell, R., and LeCun, Y. (2005). “Learning a similarity metric discriminatively, with application to face verification,” in 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR'05) (San Diego, CA: IEEE), 539–546.
Csiszár, I. (1975). I-divergence geometry of probability distributions and minimization problems. Ann. Probabil. 3, 146–158.
Gal, Y., Islam, R., and Ghahramani, Z. (2017). “Deep bayesian active learning with image data,” in International Conference on Machine Learning (New York: PMLR), 1183–1192.
Guo, X., Liu, X., Zhu, E., and Yin, J. (2017). “Deep clustering with convolutional autoencoders,” in International Conference on Neural Information Processing (Cham: Springer), 373–382.
Houlsby, N., Huszár, F., Ghahramani, Z., and Lengyel, M. (2011). “Bayesian active learning for classification and preference learning,” in arXiv [Preprint]. arXiv:1112.5745.
Hull, J. J. (1994). A database for handwritten text recognition research. IEEE Trans. Pattern Anal. Mach. Intell. 16, 550–554. doi: 10.1109/34.291440
Khosla, P., Teterwak, P., Wang, C., Sarna, A., Tian, Y., Isola, P., et al. (2020). Supervised contrastive learning. Adv. Neural Inf. Process. Syst. 33, 18661–18673.
Kim, Y.-Y., Song, K., Jang, J., and Moon, I.-C. (2021). Lada: Look-ahead data acquisition via augmentation for deep active learning. Adv. Neural Inf. Process. Syst. 34, 22919–22930.
LeCun, Y. (1998). The Mnist Database of Handwritten Digits. Available online at: http://yann.lecun.com/exdb/mnist/ (accessed May 15, 2024).
Lewis, D. D. (1995). “A sequential algorithm for training text classifiers: Corrigendum and additional data,” in Acm Sigir Forum (New York, NY: ACM), 13–19.
Lewis, D. D., and Gale, W. A. (1994). “A sequential algorithm for training text classifiers,” in SIGIR'94 (Cham: Springer), 3–12.
Liu, S., and Li, X. (2023). “Understanding uncertainty sampling,” in arXiv [Preprint] (Wiley Online Library), arXiv:2307.02719.
Masci, J., Meier, U., Cireşan, D., and Schmidhuber, J. (2011). “Stacked convolutional auto-encoders for hierarchical feature extraction,” in International Conference on Artificial Neural Networks (Cham: Springer), 3–12.
Mukherjee, S., Asnani, H., Lin, E., and Kannan, S. (2019). “Clustergan: Latent space clustering in generative adversarial networks,” in Proceedings of the AAAI Conference on Artificial Intelligence, 4610–4617.
Peng, X., Xiao, S., Feng, J., Yau, W.-Y., and Yi, Z. (2016). “Deep subspace clustering with sparsity prior,” in IJCAI, 1925–1931.
Ren, P., Xiao, Y., Chang, X., Huang, P.-Y., Li, Z., Gupta, B. B., et al. (2021). A survey of deep active learning. ACM Comp. Surveys (CSUR) 54, 1–40. doi: 10.1145/3472291
Sener, O., and Savarese, S. (2017). “Active learning for convolutional neural networks: a core-set approach,” in arXiv.
Seung, H. S., Opper, M., and Sompolinsky, H. (1992). “Query by committee,” in Proceedings of the Fifth Annual Workshop on Computational Learning Theory, 287–294.
Shannon, C. E. (1948). A mathematical theory of communication. Bell Syst. Techn. J. 27, 379–423. doi: 10.1002/j.1538-7305.1948.tb01338.x
Sinha, S., Ebrahimi, S., and Darrell, T. (2019). “Variational adversarial active learning,” in Proceedings of the IEEE/CVF International Conference on Computer Vision (IEEE/CVF), 5972–5981.
Tian, F., Gao, B., Cui, Q., Chen, E., and Liu, T.-Y. (2014). “Learning deep representations for graph clustering,” in Proceedings of the AAAI Conference on Artificial Intelligence, 1.
Van der Maaten, L., and Hinton, G. (2008). Visualizing data using t-sne. J. Mach. Learn. Res. 9, 27.
Wang, D., and Shang, Y. (2014). “A new active labeling method for deep learning,” in 2014 International Joint Conference on Neural Networks (IJCNN) (Beijing: IEEE), 112–119.
Xiao, H., Rasul, K., and Vollgraf, R. (2017). “Fashion-mnist: a novel image dataset for benchmarking machine learning algorithms,” in arXiv.
Xie, J., Girshick, R., and Farhadi, A. (2016). “Unsupervised deep embedding for clustering analysis,” in International Conference on Machine Learning (New York: PMLR), 478–487.
Yang, J., Parikh, D., and Batra, D. (2016). “Joint unsupervised learning of deep representations and image clusters,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 5147–5156.
Keywords: active learning, contrastive learning, clustering, semi-supervised learning, human-in-the-loop
Citation: Roda H and Geva AB (2024) Semi-supervised active learning using convolutional auto-encoder and contrastive learning. Front. Artif. Intell. 7:1398844. doi: 10.3389/frai.2024.1398844
Received: 10 March 2024; Accepted: 10 May 2024;
Published: 30 May 2024.
Edited by:
Jussi Tohka, University of Eastern Finland, FinlandReviewed by:
Meiyu Huang, China Academy of Space Technology (CAST), ChinaMohammad Shabaz, Model Institute of Engineering and Technology, India
Copyright © 2024 Roda and Geva. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Hezi Roda, cm9kYWhlQHBvc3QuYmd1LmFjLmls