 Navya Prakash
Navya Prakash Oliver Zielinski
Oliver Zielinski- 1Marine Sensor Systems, Institute for Chemistry and Biology of the Marine Environment (ICBM), Carl von Ossietzky University of Oldenburg, Oldenburg, Lower Saxony, Germany
- 2Marine Perception, German Research Center for Artificial Intelligence (DFKI) GmbH, Oldenburg, Lower Saxony, Germany
- 3Leibniz Institute for Baltic Sea Research Warnemuende (IOW), Rostock, Mecklenburg-Western Pomerania, Germany
Marine pollution, especially from oil spills and litter, poses significant threats to marine ecosystems, aquaculture and fisheries. The proliferation of pollutants requires advanced monitoring techniques to enhance early detection and mitigation efforts. Artificial Intelligence revolutionizes environmental monitoring by enabling rapid and precise pollution detection using remote sensing and machine learning models. This review synthesizes 53 recent studies on Artificial Intelligence applications in marine pollution detection, focusing on different model architectures, sensing technologies and preprocessing methods. The most deployed models of Random Forest, U-Network, Generative Adversarial Networks, Mask Region-based Convolution Neural Network and You Only Look Once demonstrated high prediction rate for detecting oil spills and marine litter. However, challenges remain, including limited training datasets, inconsistencies in sensor data and real-time monitoring constraints. Future research should improve Artificial Intelligence model generalization, integrate multi-sensor data and enhance real-time processing capabilities to create more efficient and scalable marine pollution detection systems.
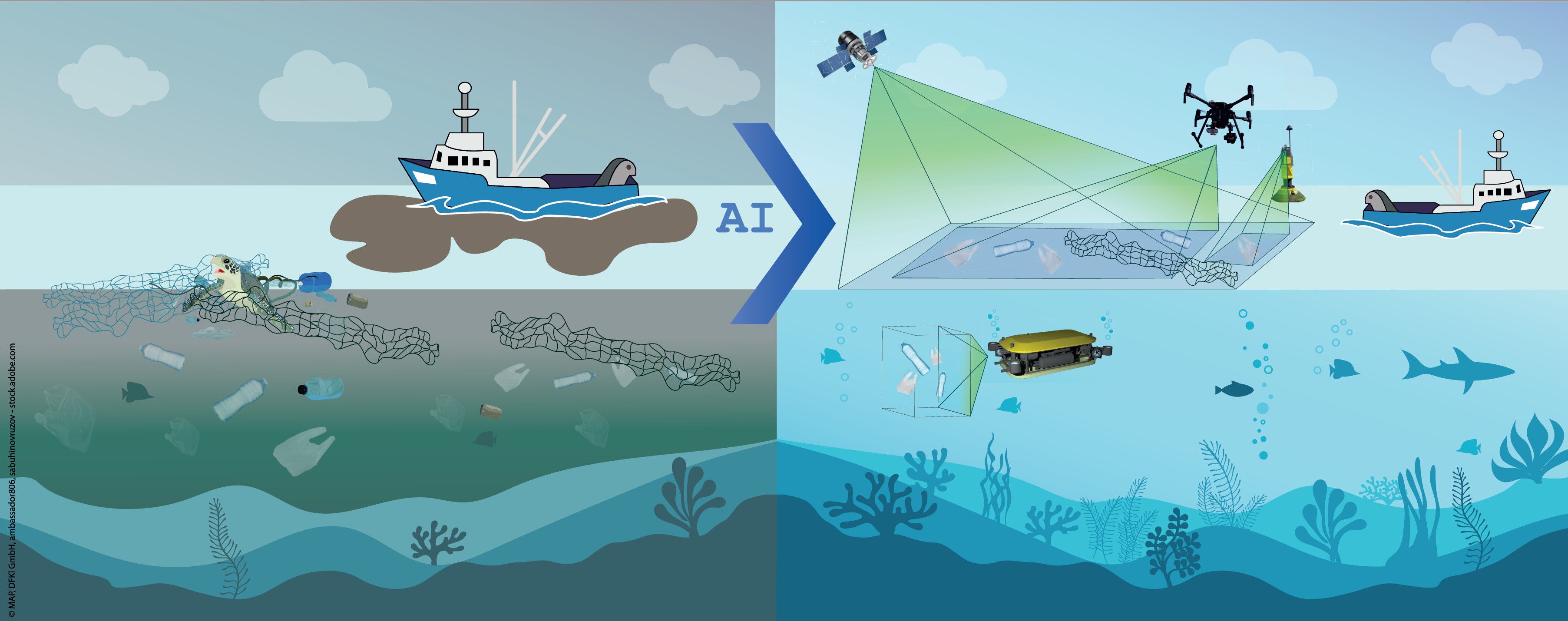
Graphical Abstract.
1 Introduction
Pollution is the release of harmful substances into the environment, leading to adverse changes in the ecosystem. Marine contamination is a significant part of global environmental pollution, as water covers a vast area of the Earth’s surface (NASA, 2023). The annual European Union (EU) Blue Economy Report (MARE, 2021) reported oil spills, litter, plastic debris, and ship emissions as significant harmful contaminants affecting the marine ecosystem. Another annual EU Blue Economy Report (EU, 2019) that followed discussed that 9 million tons of plastic litter are deposited on beaches and afloat in oceans, degrading marine ecosystems. Subsequently, the United Nations (UN) report (UN, 2022) mentioned that 17 million metric tons of plastic litter entered the ocean in 2021, and it is predicted to increase exponentially by 2040.
Furthermore, the research of Patil et al. (2016) addressed that the Caribbean Sea has dead zones with nearly 2.7 to 4.8 million tons of plastic litter entering annually. According to the research studies of Chinglenthoiba et al. (2023); Diem et al. (2023), and Fagiano et al. (2023), plastic contaminants are abundant in marine ecosystems. The maximum percentage of marine plastics and litter recorded are from the fishing fleet, merchant ships, recreational fishing, boats, coast guards, beachgoers, and industry wastes (COAPS, 2022; NAOO, 2022; OECD, 2022; UNEP, 2022). Furthermore, several studies, such as those of Leistenschneider et al. (2023); Ferreira et al. (2023); Kalter and Passow (2023), and Tedesco et al. (2024), have revealed that plastic litter and oil spills are two major marine pollutants that cause severe hazards to the ecosystem. Specifically, oil spills suffocate marine organisms, disrupt photosynthesis in aquatic plants, and lead to long-term contamination of marine habitats. Plastic litter, on the other hand, entangles marine animals, is ingested by fish and seabirds, leading to internal injuries and starvation, and degrades into microplastics that accumulate in the food chain, posing risks to marine biodiversity and human health (Diez et al., 2019). Additionally, Diez et al. (2019) reported on marine plastics and oil spill impact in the Caribbean Sea, with a concentration of 200,000 pieces of plastics measured per square kilometer in the northern region and around 250 oil spills estimated to occur yearly due to ship traffic.
However, several approaches from COAPS (2022); NAOO (2022); OECD (2022), and UNEP (2022) have proposed a Triple Planetary Crisis (TPC) (UNEP, 2022) to prevent and monitor pollution. TPC proposes measures for contamination, nature biodiversity loss, and climate change (Ford et al., 2022; Lincoln et al., 2022; UNFCCC, 2024; Sharma et al., 2023). The strategies to resolve TPC include the Sustainable Development Goals (SDGs), Marine Strategy Framework Directive (MSFD), and Good Environmental Status (GES). The UN defined the SDGs (UN, 2022), notably Goal-6 of “Clean Water and Sanitation”, to ensure water and sanitation availability with sustainable management and, in addition, Goal-14 of “Life Below Water” to conserve and sustainably use the ocean, sea, and marine resources for sustainable development (UNEP, 2022). According to the annual SDGs Report (UNEP, 2022), plastic or litter, overfishing, ocean warming, acidification, and eutrophication are primary reasons to implement SDG Goal-14. Additionally, it reported increasing acidification (CO2) from maritime traffic emissions and industrial wastes, threatening the marine ecosystem and consequently limiting the ocean’s capacity to moderate climate change (UN, 2022). The TPC’s next strategy, MSFD, aims to protect the marine environment across Europe (MSFD, 2008) and achieve good environmental conditions (GES, 2020). The main propositions of the GES are to protect the marine environment, prevent deterioration, and restore the damaged ecosystem. The primary GES descriptors are marine litter, contaminants, eutrophication, and biodiversity. The European Commission proposed the Sustainable Blue Economy (Pauli, 2010; EU, 2019) for all economic activities related to oceans, seas, and coasts. It is an initiative to use the sea sustainably, including preventing marine pollution, especially plastics (EU, 2019; Smail et al., 2019).
Furthermore, preventing and eliminating marine pollution is necessary (Meyerjürgens et al., 2023; Nama et al., 2023; Su et al., 2023), so the intention to incorporate artificial intelligence (AI) (refer to Supplementary Material) with remote sensing satellite imagery for marine pollution analysis existed in 1990 (Muller-Karger, 1992). However, according to the following reports and studies (UN, 2022; COAPS, 2022; OECD, 2022), marine pollution still exists worldwide. Thus, recently developed marine sensor technologies (Zielinski et al., 2009; Helinski et al., 2021; Salgado-Hernanz et al., 2021) are deployed for real-time investigation of marine contamination. Moreover, new technologies have been developed to determine marine pollution, predominantly using AI. The conjunction of optical sensors with AI models for monitoring and analyzing marine oil and plastics can assist in achieving the TPC goals of preventing marine pollution. The research of Moorton et al. (2022) supports using deep learning (refer to Supplementary Material, Figure_dl) to locate debris in the ocean as it does not harm aquatic life and adapt it for marine pollution prediction as AI is extensively used in various environmental disciplines (Zhang et al., 2023; Konya and Peyman, 2024). Hence, this study accumulated 53 research articles to compare state-of-the-art AI models that predicted marine pollution and proposes scoping methodologies for future research. The outline of the proposed review methodology for recent studies and technological advancements in machine learning applications for marine oil spills and litter pollution is discussed in Section 2. Furthermore, in Section 3, AI’s effectiveness for marine pollution analysis is discussed and current methodologies and limitations are summarized. Section 4 concludes this review with a brief outlook and future research directions.
2 Proposed state-of-the-art and scoping review methodology
The proposed study aims to comprehensively review recent (2016–2023) and ongoing research on state-of-the-art machine-learning-based (refer to Supplementary Material, Figure_ml) marine oil spills and litter models. It compares and briefly summarizes the effectiveness of different neural network model architectures, discusses the data types, and evaluates these technologies to contribute to more effective marine litter management strategies. Through the proposed review, we highlight the progress in recent marine pollution research and identify areas that require further research and innovation to combat the growing threat of marine litter and oil spill pollution. Therefore, the proposed study approach can be categorized as a state-of-the-art and scoping review (Grant and Booth, 2009).
The review methodology comprises two phases as depicted in Figure 1:
1. Literature search method: The literature search method fulfilled the main criteria for this systematic review of recent developments in AI-based research methods to analyze marine pollution. Thus, published articles were chosen from journals and conferences. This search included websites such as Google Scholar, ResearchGate, arXiv, JSTOR, SpringerLink, ScienceDirect, Academia.edu, Scopus, PubMed, and Web of Science. The following search filters were applied: the article selection consisted of “review” or “research” keywords with publication years from 2016 until 2023. All review and research articles were considered for the initial stage of scrutiny; the publication years were limited to 2016 until 2023 as this review aims to discuss progress in AI with recent marine research (Jia et al., 2023a, 2023b; Politikos et al., 2023; Pérez-Beltrán et al., 2024), followed by a high number of articles published with the importance of utilizing AI in various environmental research fields (Konya and Peyman, 2024). Furthermore, the subject area filters were “environmental science” or “computer science”. All open-access and locked-access publications from conference proceedings and journal articles were considered for the search. The keywords for the title search included with conjunctions of “and” and “or” are as follows: “marine pollution”, “machine learning”, “deep learning”, “marine litter”, “pollution detection”, “litter detection”, “marine plastic”, “marine waste”, “marine debris”, “oil spills”, and “marine oil”. The literature analysis involved a systematic and thorough examination of all articles. The initial process included reading and understanding each article in the following order: abstract, conclusion, experimental results, introduction, and other sections. The initial process order was formulated intentionally and proved feasible and efficient by saving time and resources. The corresponding author of this article scrutinized the research methods of each article to ensure the inclusion of machine learning (refer to Supplementary Material, Figure_ml) or deep learning (refer to Supplementary Material, Figure_dl) models for marine pollution analysis. The second process involved thoroughly reading and understanding every article to identify its comparative analysis and any successive publications. In a few cases, the proposed study used the chain or snowball sampling method to identify related research articles.
2. Literature review protocols: The literature review protocols included various state-of-the-art AI techniques emphasizing machine learning and deep learning algorithms for marine pollution analysis of two significant contaminants: oil spills and plastics or litter. The proposed study articulated optical sensors, datasets (spectra, images, videos, multispectral data, hyperspectral data), pollutant classes, pre-processing methods, and model architectures with performance analysis. The optical sensors were a significant criterion for this review scrutiny because of their extensive use in marine pollution analysis over the past few decades, especially with satellite remote sensing (Zielinski et al., 2009). Another significant criterion was that data acquisition had to be from a real-world or natural environment caused by ship traffic, ship collisions, or oil rig accidents. Similarly, the litter data acquisition should include either of the following: litter, plastics, macro- or micro-plastics, floating plastics, underwater litter, deformed litter, beach litter, debris, beach debris, and laboratory (artificially created or simulated) or real-world or natural environment pollution. Lastly, 53 research articles fulfilled these proposed protocols and were scrutinized and compared.

Figure 1. PRISMA-based pictorial representation of the proposed review methodology.
2.1 AI-based spectral marine oil pollution analysis
Oil spill incidences such as the Bravo blowout on the Ekofish fields in 1977 at the North Sea led to the formation of the Norwegian Clean Seas Association for Operating Companies (NOFO) in 1978 to develop oil spill response technologies and skimmers. This was followed by the Deep Water Horizon (DWH) oil rig explosion in the Gulf of Mexico in 2010, creating a massive leak. These incidents have formed state-of-the-art data acquisition locations for extensive research and majorly analyzed with remote sensing satellites such as Synthetic Aperture Radar (SAR) images (Topouzelis and Psyllos, 2012; Guo and Zhang, 2014). A cumulative literature review is represented in Table 1, and its connected graph of research citations is in Figure 2. The following subsections compare recent research on marine oil pollution analysis methods with distinguished data acquisition techniques such as remote sensing with aerial vehicles and satellites.
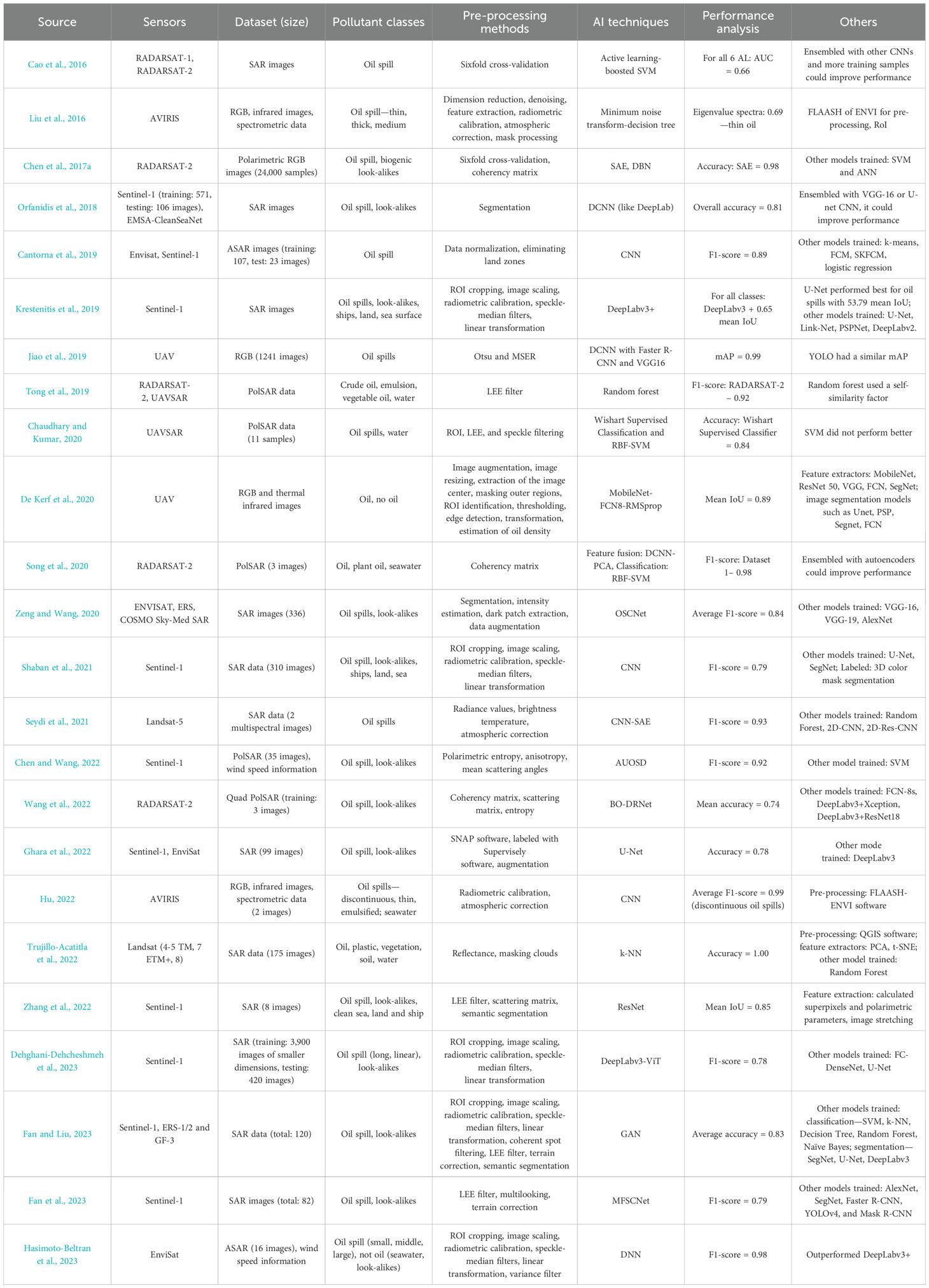
Table 1. Cumulative literature of recent AI-based spectral marine oil pollution analysis (2016–2023).
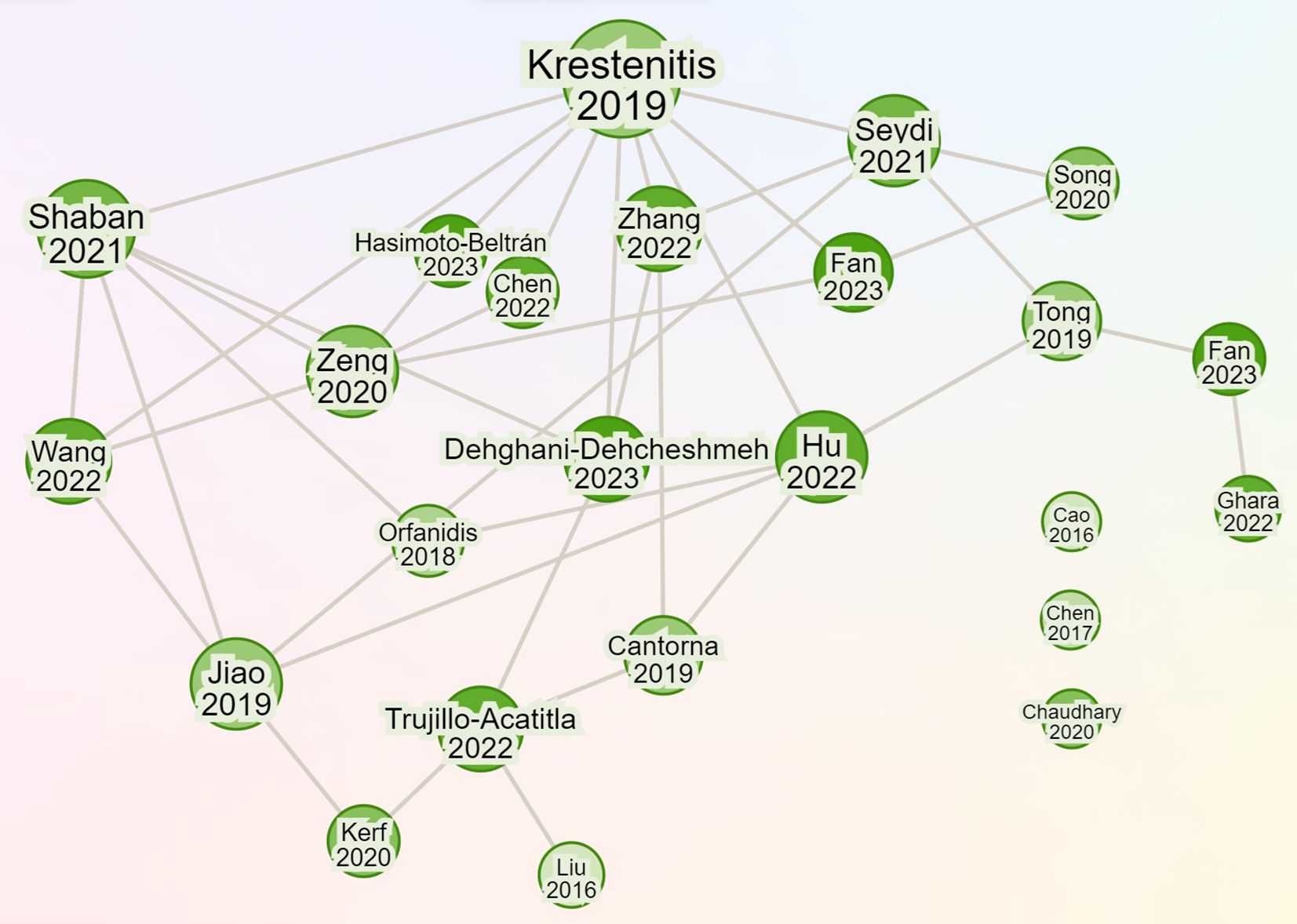
Figure 2. Connected graphs for literature of recent AI-based spectral marine oil pollution analysis (2016–2023). The edges represent citations between research articles, the nodes represent the research article, and its size represents the number of citations (a large node size indicates more citations and vice- versa) (graphics from ResearchRabbit.ai).
2.1.1 Remote sensing with aerial vehicle
In recent studies on oil spill detection, various methods have been employed to enhance the accuracy (McHugh, 2012) (refer to Supplementary Material, Equation (1)) and efficiency of identifying and classifying oil spills with spectral data. One such approach developed by Liu et al. (2016) used an airborne visible infrared imaging spectrometer (AVIRIS) to detect oil spills from the DWH incident, employing a decision tree (Quinlan, 1986) classifier enhanced with minimum noise fraction (MNF) (Green et al., 1988; ENVI, 2022) transformation for noise reduction and feature extraction. This method classified oil spill thickness levels but was influenced by environmental factors. Furthermore, using the same dataset of the DWH incident, Hu (2022) developed an advanced approach by developing a multi-scale convolutional neural network (CNN) integrating 1D-CNN for spectral features and 2D-CNN for spatial features, achieving high classification accuracy with F1-scores of up to 0.99. Moreover, De Kerf et al. (2020) introduced MobileNet-FCN8 for unmanned aerial vehicle (UAV)-based controlled oil spill detection using visible and thermal infrared images, incorporating extensive pre-processing techniques and hyperparameter optimization. The ensemble of MobileNet-FCN8 (Sandler et al., 2018) with RMSprop (Hinton et al., 2012) achieved the highest mean IoU of 0.89, demonstrating superior performance over traditional methods. These studies collectively highlight advancements in oil spill detection from hyperspectral analysis to deep learning-based UAV monitoring.
Manual inspection versus convolutional neural networks: Jiao et al. (2019) proposed UAV-based oil spill detection using deep learning and image processing techniques, significantly reducing detection costs by 57.2% compared to manual inspection. A DJI Phantom 4 Pro UAV captured high-resolution images pre-processed using Otsu (Otsu, 1979) and MSER (Matas et al., 2004) techniques combined with a deep learning model to enhance the detection accuracy. Furthermore, Ren et al. (2016) developed a faster regional-convolution neural network (R-CNN) (Girshick et al., 2014) pre-trained on ImageNet (Deng et al., 2009) with transfer learning (Goodfellow et al., 2016), which achieved the highest mean average precision (mAP) of 0.9930. Comparative evaluations with other models, including You-Only-Look-Once (YOLO) (Redmon et al., 2015) (0.9918 mAP) and Fast R-CNN (0.8771 mAP), confirmed Faster R-CNN’s superior performance. The study highlighted the efficiency, accuracy, and cost-effectiveness of integrating UAV technology with deep learning for oil spill monitoring.
Earlier studies, such as that of Liu et al. (2016), utilized MNF-decision tree analysis for hyperspectral oil spill detection, while Hu (2022) improved the classification accuracy with a multi-scale CNN. De Kerf et al. (2020) introduced MobileNet-FCN8 for UAV-based monitoring, achieving a high mean IoU of 0.89. Collectively, these advancements highlight the transition from traditional spectral analysis to AI-driven UAV and CNN models, enhancing oil spill detection with higher accuracy, efficiency, and real-time capabilities.
2.1.2 Remote sensing with satellite
Traditional machine learning techniques and convolutional neural networks have been employed to detect marine oil pollution using SAR data from different satellite missions. A summary of their comparative analysis is discussed in this subsection.
Machine learning model comparisons: State-of-the-art machine learning algorithms, including SVM, decision trees, random forest, and k-nearest neighbor (k-NN) (Fix and Hodges, 1951; Cover and Hart, 1967), have been applied to detect marine oil pollution using sensor and remote sensing data. A random forest classifier developed by Tong et al. (2019) using PolSAR data from RADARSAT-2 and UAVSAR effectively distinguished oil slicks from look-alikes with F1-scores of 0.92 and 0.82, respectively, after pre-processing with LEE filtering (Lee et al., 2003) and multi-polarimetric feature extraction. Similarly, Trujillo-Acatitla et al. (2022) trained k-NN, random forest, and SVM on Landsat multispectral data for binary oil spill classification, where k-NN achieved 1.00 accuracy but lacked validation against overfitting. Additionally, an SVM model with active learning (Burr, 2010; Mohri et al., 2018) was developed by Cao et al. (2016) which classified oil spills and look-alikes from SAR images of RADARSAT-1 and RADARSAT-2 with an AUC value of 0.66, demonstrating its capability to reduce training data dependency. These studies highlight the effectiveness of ML models in oil spill detection, leveraging different data sources and feature extraction techniques.
CNNs for oil spill detection: Various CNN models have been developed for oil spill detection using Synthetic Aperture Radar data—for example, Cantorna et al. (2019) proposed a six-layer CNN (Hou and Zhao, 2017) trained on ENVISAT and Sentinel-1 data, achieving an AUC value of 0.99 and outperforming clustering algorithms like k-means (Faber, 1994; Hastie et al., 2009) and Logistic Regression (Cramer, 2002). A CNN with multi-scale convolution of Seydi et al. (2021) detected oil spills from Landsat-5 SAR data, achieving F1-scores of 0.93 (cloud-free) and 0.88 (cloudy). Song et al. (2020) developed a deep CNN (DCNN) (Rosenblatt, 1958) for polarimetric SAR (PolSAR) images, integrating PCA and RBF-SVM, achieving F1-scores of 0.98, 0.94, and 0.80 across different datasets. This was followed by a 23-layer CNN by Shaban et al. (2021) trained on Sentinel-1 SAR images that outperformed U-Net and SegNet with an F1-score of 0.79 but which struggled with multi-class classification. Furthermore, Chen et al. (2017a) applied SAE and DBN to RADARSAT-2 data, with SAE achieving 98.92% accuracy. Chaudhary and Kumar (2020) utilized UAVSAR and RISAT-1 data, where Wishart Supervised Classification (Wishart, 1928) outperformed SVM with an accuracy of 0.845. These studies demonstrate the effectiveness of deep learning and machine learning techniques in oil spill detection, leveraging SAR data with advanced pre-processing techniques.
Advancements in CNN architectures: Several studies have explored deep learning models for marine oil spill detection using Sentinel-1 and RADARSAT-2 SAR images. Orfanidis et al. (2018) and Krestenitis et al. (2019) demonstrated that DeepLab (Chen et al., 2017b)-based CNNs performed well in segmenting oil spills, with DeepLabv3+ (Chen et al., 2018) achieving a mean IoU of 0.6506. Ghara et al. (2022) showed that U-Net outperformed DeepLabv3, achieving 0.78 accuracy, while Dehghani-Dehcheshmeh et al. (2023) found that the DeepLabv3-ViT (Dosovitskiy et al., 2020) hybrid achieved the highest F1-score of 0.78. Wang et al. (2022) introduced BO-DRNet (Frazier, 2018), which surpassed FCN-8s (Jégou et al., 2017; Long et al., 2015) and DeepLabv3+ with a mean accuracy of 0.75. Additionally, U-Net variants like OSCNet by Zeng and Wang (2020), ResNet-based DNN by Hasimoto-Beltran et al. (2023), and Attention U-Net by Chen and Wang (2022) have shown high classification accuracy, with F1-scores ranging from 0.84 to 0.98. Zhang et al. (2022) used ResNet (He et al., 2015) for Persian Gulf SAR data, achieving a mean IoU of 0.85. The MFSCNet of Fan et al. (2023) integrated multi-feature learning and outperformed other CNNs with an F1-score of 0.79. Fan and Liu (2023) employed a GAN-based classifier, achieving 0.97 accuracy in distinguishing oil spills from look-alikes. Therefore, this comparative analysis reveals that U-Net, DeepLab, and hybrid CNN-ViT models have consistently outperformed traditional machine learning techniques like SVM and random forest, proving their effectiveness in oil spill detection in SAR imagery.
The significant research gaps identified from these 24 research articles in recent AI-based spectral marine oil pollution analysis are as follows:
● Limited generalization and small datasets—Most studies rely on limited datasets (often less than 1,000 images), which reduce model generalization across diverse oil spill conditions, SAR sensors, and geographical regions. The need for more extensive, standardized, and diverse datasets remains a critical gap.
● Insufficient multi-modal data integration—While some studies incorporate wind speed and polarimetric SAR features, few leverage multi-sensor fusion (e.g., optical, infrared, and hyperspectral data) to improve oil spill detection accuracy under varying environmental conditions.
● Challenges in differentiating oil spills from look-alikes—Despite a high classification accuracy, many models struggle with distinguishing oil spills from look-alike phenomena (e.g., biogenic slicks, low wind areas) due to limited spectral and textural differences in SAR imagery.
● Lack of real-time and computationally efficient models—Many deep learning architectures are computationally intensive, making them unsuitable for real-time applications in maritime monitoring systems, necessitating lightweight and edge-compatible AI models.
● Limited benchmarking and standardization—The absence of standardized evaluation metrics, benchmark datasets, and comparative studies across multiple AI models hinders the reproducibility and scalability of these approaches for operational use in marine oil spill monitoring.
Future research can address the gaps identified in recent research and significantly advance the effectiveness and reliability of marine oil detection and analysis technologies by implementing the improvements listed below:
● Integration of multi-sensor and multi-modal data—Combining SAR with optical, infrared, and hyperspectral data can enhance oil spill detection accuracy by leveraging complementary spectral and spatial information.
● Development of generalized and transferable AI models—Creating deep learning models that generalize well across geographic regions, sensor types, and environmental conditions will improve real-world applicability.
● Enhancing real-time and edge computing capabilities—Implementing lightweight AI models optimized for real-time processing on satellites, drones, and autonomous vessels can enable faster and more efficient oil spill monitoring.
● Advanced feature engineering and hybrid AI approaches—Incorporating physics-based modeling, explainable AI, and hybrid architectures (e.g., CNN-ViT, GANs) can improve segmentation accuracy and the differentiation of oil spills from look-alikes.
● Establishment of standardized datasets and evaluation metrics—Creating publicly available, high-quality annotated datasets and standardized benchmarking protocols will facilitate the reproducibility and comparability of AI-based oil spill detection models.
2.2 AI-based spectral marine floating litter, plastics, and debris pollution analysis
Recent research has leveraged machine learning and advanced image processing techniques to enhance the detection and classification of marine litter, addressing the limitations of traditional manual monitoring methods. Various models, including support vector machines (SVM), random forest classifiers, and deep learning algorithms, have been applied to high-resolution imaging technologies like reflectance spectrometers and digital cameras to analyze floating, beach, and underwater debris. These AI-driven approaches enable automated, scalable, and real-time marine pollution monitoring using images captured from aerial vehicles, satellites, autonomous underwater vehicles, and laboratory setups. Deep learning models, in particular, have demonstrated superior accuracy in distinguishing different types of litter, including plastics, ropes, and buoys, even in challenging environments. The integration of these technologies represents a significant advancement in marine litter detection, facilitating large-scale environmental assessments and improving efforts to mitigate ocean pollution. A cumulative literature review in Table 2 and its connected graph in Figure 3 represent citations between research articles. The following subsections compare recent research on marine litter pollution analysis models with different data acquisition strategies such as autonomous underwater vehicles, aerial vehicles, satellites, and from a laboratory.
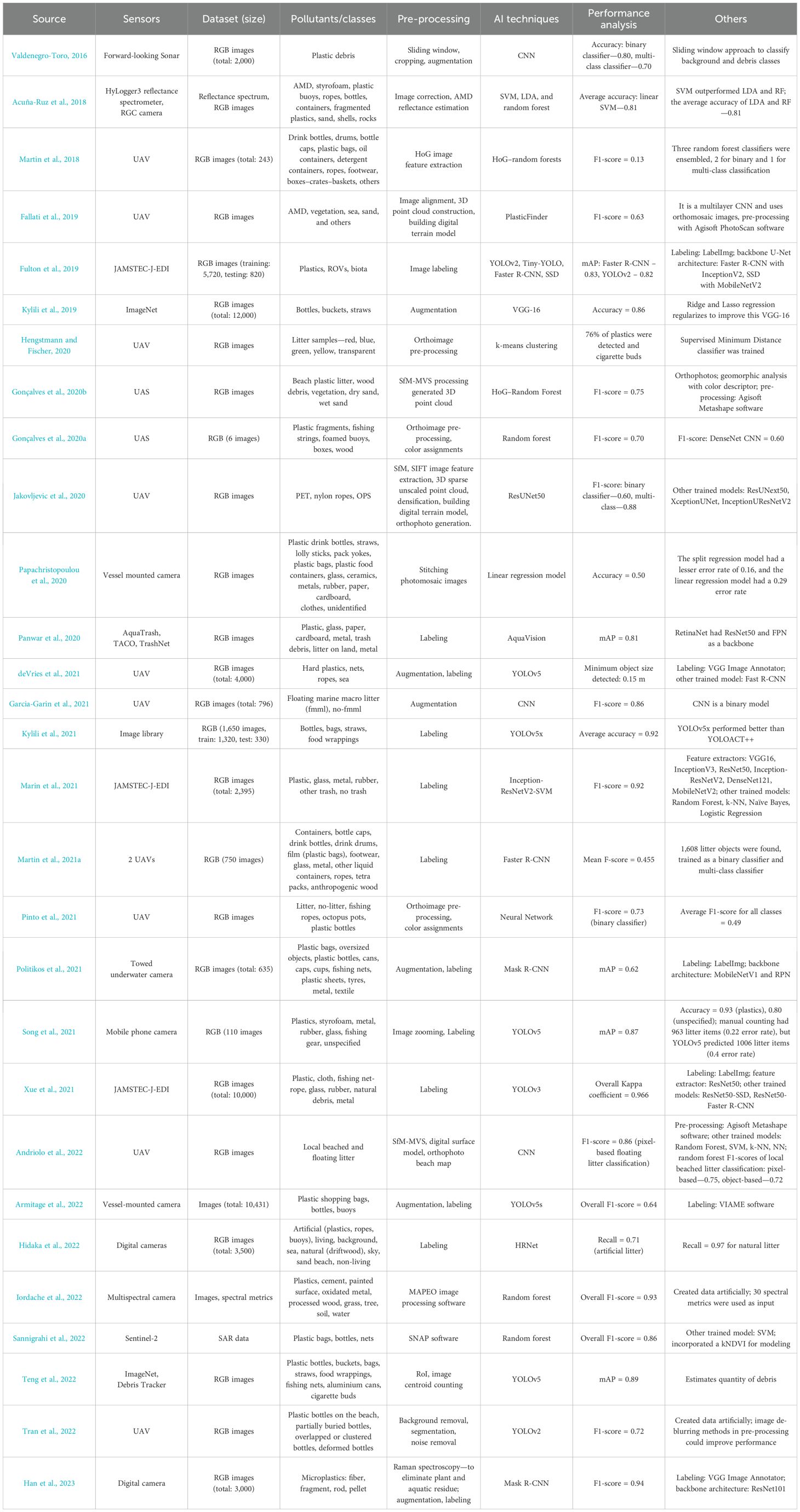
Table 2. Cumulative literature of recent AI-based spectral marine litter pollution analysis (2016–2023).
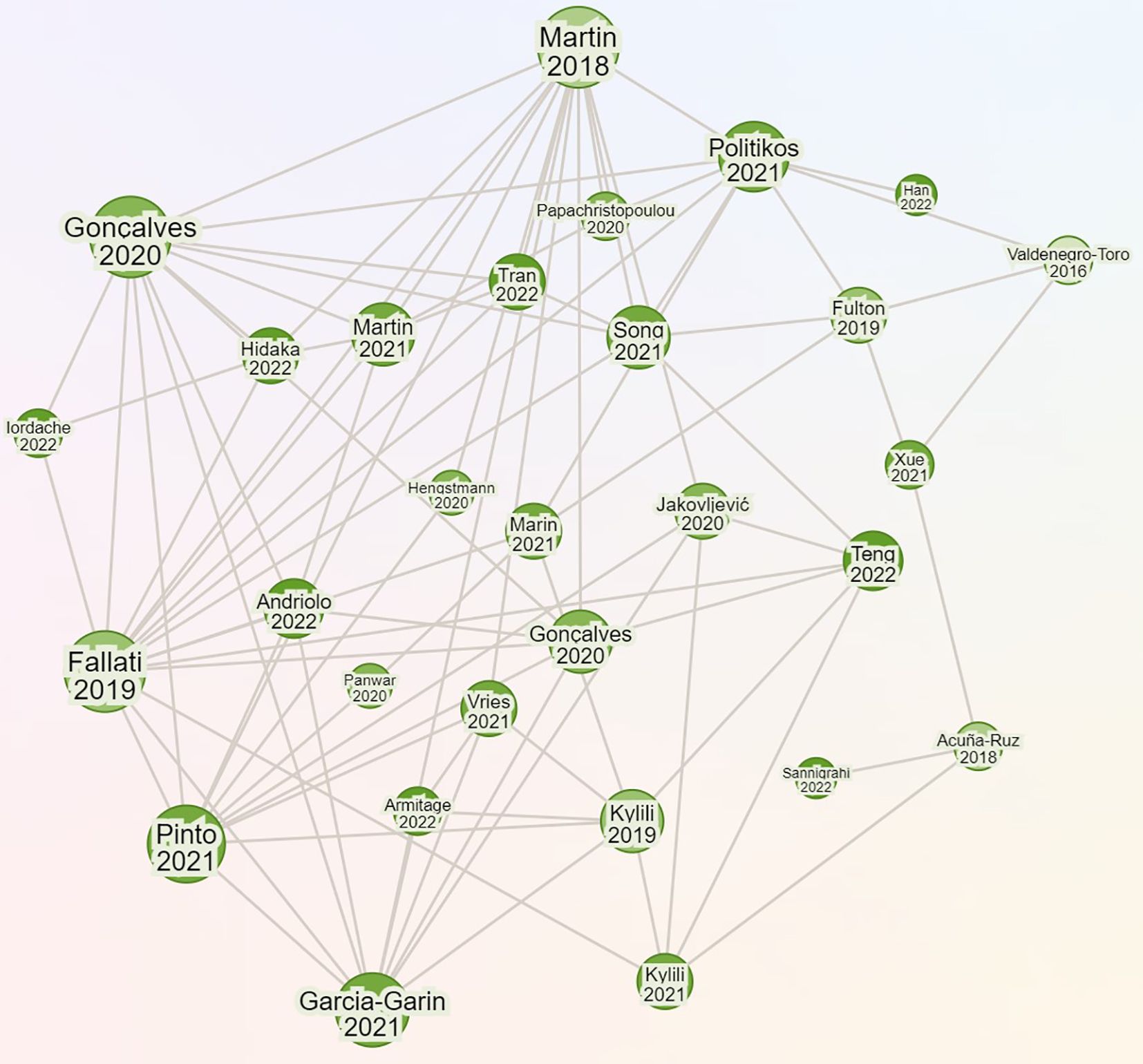
Figure 3. Connected graphs for literature of recent AI-based spectral marine litter pollution analysis (2016–2023). The edges represent citations between research articles, the nodes represent research article, and its size represents the number of citations (a large node size has more citations and vice- versa) (graphics from ResearchRabbit.ai).
2.2.1 Remote sensing with autonomous underwater vehicle
2.2.1.1 State-of-the-art CNNs and machine learning ensembled models
Recent advancements in marine debris detection have utilized various CNN-based architectures, each offering unique strengths. Valdenegro-Toro (2016) developed a forward-looking Sonar (FLS) CNN using data for binary and multi-class classification, achieving reasonable accuracy (0.80 and 0.70, respectively) but struggling with deformed plastic detection due to limited training data. Marin et al. (2021) improved the performance by integrating U-Net feature extractors with classifiers like SVM and random forest, where fine-tuned Inception-ResNetV2 achieved the highest F1-score (0.92). Fulton et al. (2019) compared U-Net with YOLO and Faster R-CNN, finding that YOLOv2 provided real-time efficiency, while U-Net yielded superior accuracy for diverse litter types. Xue et al. (2021) further enhanced detection with a hybrid ResNet50-YOLOv3 model, achieving a high Kappa coefficient (0.966) and outperforming Faster R-CNN and SSD in detecting various debris sizes. Specialized models like AquaVision by Panwar et al. (2020) and Mask R-CNN by Politikos et al. (2021) leveraged advanced feature extraction techniques, improving detection in challenging underwater environments. These studies demonstrate the evolution of CNN-based marine debris detection, emphasizing the benefits of ensemble models and transfer learning in improving accuracy and real-time performance.
2.2.2 Remote sensing with aerial vehicle
2.2.2.1 Advancements in ensembled models
Martin et al. (2018) developed an ensembled random forest classifier using orthomosaic litter images from UAV-based surveys along the Saudi Arabian Red Sea coastline. The model, trained with a Histogram of Oriented Gradients (HoG) (Dalal and Triggs, 2005) features, has utilized two binary classifiers to separate litter from background elements and a multi-class classifier to distinguish debris types. While the system detected drink containers (0.44), bottle caps (0.5), and plastic bags (0.037) with varying accuracy, it generated significant false positives, highlighting the impact of image resolution on performance. Comparisons with other classifiers by Fallati et al. (2019), Gonçalves et al. (2020b); Garcia-Garin et al. (2021), and Tran et al. (2022) demonstrated the potential of HoG–random forest models for marine litter detection with suggestions for improved accuracy through lower UAV flight altitudes.
2.2.2.2 Advancements in CNNs versus manual inspections
Building on Martin et al. (2018), an enhanced model by Martin et al. (2021a, 2021b) used Faster R-CNN with UAV images from 44 beaches in Saudi Arabia, achieving an F1-score of 0.4556, with improved accuracy using DJI Phantom 4 Pro (82%) over Phantom 3 Adv (62%). The PlasticFinder (PlasticFinder, 2017) model by Fallati et al. (2019) trained a CNN on UAV images from the Maldives, outperforming Martin et al. (2018) with an F1-score of 0.63. Furthermore, Gonçalves et al. (2020b) improved marine litter detection with random forest classification on Portuguese beaches (F1-score: 0.75), though it misidentified plants as litter. Gonçalves et al. (2020a) compared random forest (F1-score: 0.70) and DenseNet CNN (F1-score: 0.60), showing random forest’s better accuracy in pixel-based classification. Pinto et al. (2021) developed a neural network using UAV orthoimages from Portugal, achieving F1-scores of 0.49 (multi-class) and 0.73 (binary) by leveraging multiple color spaces. Finally, Tran et al. (2022) introduced YOLOv2 CNN for UAV-based litter detection in Taiwan, outperforming previous models with F1-scores of 0.95 (training) and 0.72 (testing), demonstrating the effectiveness of pre-processing techniques in improving marine debris classification.
Several studies have explored AI and deep learning models for detecting marine litter, leveraging datasets from UAVs, satellites, and experimental setups. Kylili et al. (2019) used VGG-16 with Ridge and Lasso regression, achieving 86% accuracy in identifying floating plastics. An improved version by Kylili et al. (2021) trained YOLOv5x and YOLOACT++ on marine litter images, demonstrating better real-time detection (YOLOv5x) and object segmentation (YOLOACT++) with an accuracy of 0.924 for video snapshots. Jakovljevic et al. (2020) applied ResUNet50 for floating pollutant detection in lakes and rivers, achieving an F1-score of 0.88 in multi-class classification. Garcia-Garin et al. (2021) developed a CNN for UAV and aircraft-acquired images, outperforming previous works with an F1-score of 0.86. Comparisons of machine learning methods showed random forest classifiers outperforming SVMs, as demonstrated by Iordache et al. (2022) and Sannigrahi et al. (2022). Iordache et al. (2022) trained a random forest model on multispectral images, achieving an F1-score of 0.93. Hengstmann and Fischer (2020) applied k-means clustering on UAV images for freshwater litter detection, confirming plastics as the dominant pollutant. These studies highlight the effectiveness of AI-driven approaches for marine litter detection, emphasizing the importance of high-quality imagery and dataset augmentation to enhance classification performance.
CNNs, particularly YOLO architectures, have demonstrated superior performance in marine litter detection compared to traditional machine learning classifiers like random forest and SVM. Andriolo et al. (2022) compared different models for UAV-based litter mapping on Portuguese and Spanish coasts, where random forest outperformed CNN for pixel-based beached litter (F1-score: 0.75 vs. 0.60), but CNN achieved the highest F1-score (0.86) for floating litter classification. YOLOv5 has been widely used to detect marine litter in various environments. deVries et al. (2021) trained YOLOv5 and Faster R-CNN on UAV images near the Great Pacific Garbage Patch, with YOLOv5 detecting floating macroplastics as small as 0.15 µm, outperforming Faster R-CNN. Similarly, Armitage et al. (2022) used YOLOv5s on vessel-mounted camera videos, achieving an F1-score of 0.64, with better plastic bag detection than YOLOv5m. Teng et al. (2022) trained YOLOv5 on diverse litter images, including plastic bottles, fishing nets, and cigarette butts, achieving a mean average precision (mAP) of 0.89 using centroid tracking for litter quantification. These studies highlight YOLO-based CNNs as real-time marine litter detection tools, emphasizing the importance of high-quality data and model training.
2.2.3 Remote sensing with satellite and stationary or laboratory
Machine learning models, particularly random forest, SVM, and deep learning-based CNNs, have been widely applied for marine litter detection. Sannigrahi et al. (2022) trained random forest and SVM on Sentinel-2 data, where random forest achieved an F1-score of 0.86 for plastics. In contrast, Acuña-Ruz et al. (2018) found that SVM-linear (accuracy: 0.84) outperformed random forest in AMD classification using spectral data from Chilean beaches. The regression models of Papachristopoulou et al. (2020) predicted beach litter distribution, with the split regression model showing better performance. Deep learning approaches, such as YOLOv5 by Song et al. (2021), achieved a mAP of 0.87 in predicting beach litter in Korea, outperforming manual inspection. HRNet (Guo et al., 2018; Wang et al., 2021) by Hidaka et al. (2022) effectively detected artificial and natural debris in Japan, with recall values of 0.71 and 0.97, respectively. A Mask R-CNN by Han et al. (2023) with ResNet101 backbone classified marine microplastics in Hawaii, achieving an F1-score of 0.94, surpassing U-Net (0.93). These studies highlight the shift from traditional classifiers to deep learning, demonstrating CNNs’ superior accuracy and adaptability in detecting marine litter across various environments.
The significant research gaps identified from these 29 research articles in recent AI-based spectral marine litter pollution analysis are as follows:
● Limited multi-sensor and multi-modal data fusion—Most studies rely on single-sensor data (UAV, satellite, or spectral imaging), lacking an integrated approach that combines spectral, spatial, and temporal data for enhanced detection accuracy.
● Challenges in small and overlapping litter detection—While CNN-based models like YOLO and Mask R-CNN show promise, they struggle with small, fragmented, or overlapping litter items, particularly microplastics, requiring improved segmentation and feature extraction techniques.
● Lack of standardized and large-scale datasets—Most models are trained on region-specific, small datasets, limiting their generalizability. A globally standardized, diverse dataset covering different environmental conditions is needed for more robust AI training.
● Limited real-time and autonomous monitoring capabilities—Despite advancements, few models operate in real time or integrate with autonomous systems (e.g., drones, robotic platforms) for continuous large-scale monitoring of marine litter.
● Underexplored spectral signature analysis for litter classification—While some studies use spectral data, many do not fully leverage hyperspectral imaging or advanced spectral decomposition techniques to distinguish between litter materials more effectively.
Future research can address the gaps identified in recent research and significantly advance the effectiveness and reliability of marine litter detection and analysis technologies by implementing the improvements listed below:
● Multi-sensor and multi-modal data integration—Combining UAV, satellite, spectral, and in- situ imaging data can improve detection accuracy by leveraging complementary information across different sensors and wavelengths.
● Enhanced deep learning models for small and overlapping litter—Developing advanced AI models with improved segmentation, feature extraction, and super-resolution techniques can enhance microplastics and overlapping litter detection.
● Creation of large, standardized, and diverse datasets—Establishing global, high-quality datasets with standardized labeling and diverse environmental conditions will improve model generalizability and facilitate study benchmarking.
● Real-time and autonomous monitoring systems—Integrating AI models with real-time UAV and robotic platforms can enable continuous, large-scale marine litter monitoring with minimal human intervention.
● Advanced spectral analysis for material classification—Using hyperspectral and multispectral imaging with machine-learning-based spectral unmixing can enhance the differentiation of marine litter types, including plastics, metals, and organic debris.
3 Discussion
Recent research highlights significant advancements in AI-based marine pollution detection and identifies key challenges requiring further investigation. A primary limitation is the restricted access to high-quality, real-time remote sensing satellite data due to cloud cover, weather conditions, and temporal gaps, which affect AI model performance (Prakash et al., 2021; Ryazanov et al., 2021; Andriolo et al., 2022). To address this, future research should integrate aerial vehicles, offshore sensors, and synthetic datasets to enhance data availability and model training (Wang et al., 2022). The effectiveness of AI models is also hindered by limited and non-diverse training datasets, particularly for detecting deformed or submerged marine litter, necessitating the expansion of multispectral and hyperspectral imaging applications (Prakash et al., 2021). Moreover, developing real-time AI-based monitoring systems using UAVs and offshore spectral sensors can improve the tracking of marine litter and oil spills (Veettil et al., 2022; Rodrigues et al., 2023). Advances in domain adaptation techniques and multi-environment AI models are needed to enhance generalizability across diverse marine conditions (Prakash et al., 2021).
Additionally, by combining automated AI analysis with human verification, hybrid approaches could enhance detection accuracy and minimize false positives (Yang et al., 2022a). Finally, integrating AI with real-time data processing on edge devices, policy-driven pollution management strategies, and multidisciplinary collaborations are crucial to improve marine pollution monitoring and response (Helinski et al., 2021; Ma et al., 2023; Vasconcelos et al., 2023). Addressing these challenges will significantly advance AI-driven marine pollution analysis and contribute to more effective environmental protection efforts.
4 Conclusion
The development and performance of AI models to predict marine pollution are highly influenced by several critical factors: the quality and quantity of training data, which includes images, videos, and spectral data; the pre-processing techniques and feature extraction methods employed; and the architecture of the machine learning models. Current state-of-the-art AI models, such as custom-YOLOv5, have demonstrated superior prediction rates, mainly with spectral sensor data, to detect marine oil spills and litter pollution (Prakash et al., 2021).
Despite these advances, there is significant potential for further improvement. Enhanced results could be achieved by implementing ensembled (Goodfellow et al., 2016; Dietterich, 2020) models and using more extensive, augmented datasets (Prakash et al., 2021). Contrastive learning involves training models with positive (pollution) and negative (clean water) examples, which can enhance training sets and improve future deep learning models for marine pollution detection.
Moreover, data augmentation and transfer learning from pre-trained models can significantly boost the efficiency and accuracy of these AI systems. These strategies will be pivotal in advancing the field of AI-driven spectral analysis for real-time offshore monitoring of marine oil spills and floating litter (Prakash et al., 2021). By leveraging these advanced techniques, future AI models can become more robust and reliable in predicting and managing marine pollution.
Author’s note
The corresponding author conducted this review from 2020 – 2023 while working as a Researcher at DFKI GmbH and a Doctoral Student at ICBM, Carl von Ossietzky University of Oldenburg.
Data availability statement
The original contributions presented in the study are included in the article/Supplementary Material. Further inquiries can be directed to the corresponding author.
Author contributions
NP: Conceptualization, Data curation, Formal Analysis, Investigation, Methodology, Project administration, Resources, Software, Validation, Visualization, Writing – original draft, Writing – review & editing. OZ: Conceptualization, Funding acquisition, Supervision, Writing – review & editing.
Funding
The author(s) declare that financial support was received for the research and/or publication of this article. DFKI acknowledges the MWK’s financial support through “Niedersachsen Vorab” (ZN3480) and MarTERA 2019 (ERA-NET COFUND).
Acknowledgments
Thanks to Charles Lennart Müller and Annemarie Popp (Media team, DFKI, Bremen) for the graphical abstract.
Conflict of interest
Authors NP and OZ were employed by DFKI GmbH.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fmars.2025.1486615/full#supplementary-material
References
Acuña-Ruz T., Uribe D., Taylor R., Amézquita L., Guzmán M. C., Merrill J., et al. (2018). Anthropogenic marine debris over beaches: spectral characterisation for remote sensing applications. Remote Sens. Environ. 217, 309–322. doi: 10.1016/j.rse.2018.08.008
Andriolo U., Garcia-Garin O., Vighi M., Borrell A., Gonçalves G.. (2022). Beached floating litter surveys by unmanned aerial vehicles: operational analogies differences. Remote Sens. 14, 1336. doi: 10.3390/rs14061336
Armitage S., Awty-Carroll K., Clewley D., Martinez-Vicente V. (2022). Detection classification of floating plastic litter using a vessel-mounted video camera deep learning. Remote Sens. 14, 3425. doi: 10.3390/rs14143425
Burr S. (2010). Active Learning Literature Survey. Available online at: https://burrsettles.com/pub/settles.activelearning.pdf (Accessed April 2022).
Cantorna D., Dafonte C., Iglesias A., Arcay B. (2019). Oil spill segmentation in SAR images using convolutional neural networks: A comparative analysis with clustering and logistic regression algorithms. Appl. Soft. Comput. 84, 105716. doi: 10.1016/j.asoc.2019.105716
Cao Y., Xu L., Clausi D. (2016). “Active learning for identifying marine oil spills using 10-year RADARSAT data,” in IEEE International Geoscience Remote Sensing Symposium IGARSS. doi: 10.1109/igarss.2016.7731014
Chaudhary V., Kumar S. (2020). Marine oil slicks detection using spaceborne and airborne S.A.R. Data. Adv. Space Res. 66, 854–872. doi: 10.1016/j.asr.2020.05.003
Chen G., Li Y., Sun G., Zhang Y. (2017a). “Polarimetric SAR oil spill detection based on deep networks,” in IEEE International Conference on Imaging Systems Techniques. doi: 10.1109/ist.2017.8261559
Chen L.-C., Papandreou G., Kokkinos I., Murphy K., Yuille A. L. (2017b). DeepLab: semantic image segmentation with deep convolutional nets, atrous convolution, fully connected C.R.F.s. IEEE Trans. Pattern Anal. Mach. Intell. 40, 834–848. doi: 10.1109/TPAMI.2017.2699184
Chen L.-C., Zhu Y., Papandreou G., Schroff F., Adam H. (2018). Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation (ECCV, Computer Vision and Pattern Recognitio). doi: 10.48550/arXiv.1802.02611
Chen Y., Wang Z. (2022). Marine oil spill detection from SAR images based on attention U-Net model using polarimetric and wind speed information. Int. J. Environ. Res. Public Health 19, 12315. doi: 10.3390/ijerph191912315
Chinglenthoiba C., Pukhrambam B., Kangabam T. C., Khaidem S. D., Naorem J. M., Yumnam D., et al. (2023). A review on microplastic pollution research in India. Regional Stud. Mar. Sci. 58. doi: 10.1016/j.rsma.2022.102777
COAPS (2022). Center for Ocean-Atmospheric Prediction Studies. Global Model for Monitoring Marine Litter. Available online at: https://www.coaps.fsu.edu/our-expertise/global-model-for-marine-litter (Accessed April 2022).
Cover T., Hart P. (1967). Nearest neighbor pattern classification. IEEE Trans. Inf. Theory 13, 21–27. doi: 10.1109/TIT.1967.1053964
Cramer J. S. (2002). The Origins of Logistic Regression (Tinbergen Institute Working Paper, 2002-119/4). doi: 10.2139/ssrn.360300
Dalal N., Triggs B. (2005). Histograms of Oriented Gradients for Human Detection (CVPR). doi: 10.1109/cvpr.2005.177
Dehghani-Dehcheshmeh S., Akhoondzadeh M., Homayouni S. (2023). Oil spills detection from SAR earth observations based on A hybrid CNN transformer networks. Mar. pollut. Bull. 190, 114834. doi: 10.1016/j.marpolbul.2023.114834
De Kerf T., Gladines J., Sels S., Vanlanduit S. (2020). Oil spill detection using machine learning infrared images. Remote Sens. 12, 4090. doi: 10.3390/rs12244090
Deng J., Dong W., Socher R., Li L. -J., Li K., Li F. -F. (2009). “ImageNet: A large-scale hierarchical image database,” in IEEE Conference on Computer Vision Pattern Recognition, 248–255. doi: 10.1109/CVPR.2009.5206848
deVries R., Egger M., Mani T., Lebreton L. (2021). Quantifying Floating Plastic Debris at Sea using Vessel-Based Optical Data Artificial Intelligence. Remote Sens. 13, 3401. doi: 10.3390/rs13173401
Diem A., Tesfaldet Y. T., Hocherman T., Hoon V., Zijlemans K. (2023). Marine litter in the red sea: status and policy implications. Mar. pollut. Bull. 187. doi: 10.1016/j.marpolbul.2022.114495
Dietterich T. G. (2020). “Ensemble methods in machine learning,” in Multiple Classifier Systems, Lecture Notes in Computer Science (Springer), 1857. doi: 10.1007/3-540-45014-9_1
Diez S. M., Patil P. G., Morton J., Rodriguez D. J., Vanzella A., Robin D., et al. (2019). Marine Pollution in the Caribbean: Not a Minute to Waste (World Bank Group). Available at: http://documents.worldbank.org/curated/en/482391554225185720/Marine-Pollution-in-the-Caribbean-Not-a-Minute-to-Waste (Accessed April 2022).
Dosovitskiy A., Beyer L., Kolesnikov A., Weissenborn D., Zhai X., Unterthiner T., et al. (2020). An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale (ICLR, Computer Vision and Pattern Recognition). doi: 10.48550/arXiv.2010.11929
ENVI (2022). Environment for Visualising Images Software. Available online at: https://www.l3harrisgeospatial.com/Data-Imagery (Accessed April 2022).
EU (2019). The EU Blue Economy Report 2019 (Directorate-General for Maritime Affairs and Fisheries, European Commission, Publications Office of the European Union). Available at: https://op.europa.eu/en/publication-detail/-/publication/676bbd4a-7dd9-11e9-9f05-01aa75ed71a1/language-en/ (Accessed April 2022).
Faber V. (1994). Clustering and the Continuous K-means algorithm. Los Alamos Sci. 22, 138–144. Available at: https://www.researchgate.net/publication/243484757_Clustering_and_the_continuous_K-means_algorithm (Accessed April 2022).
Fagiano V., Compa M., Alomar C., Morató M., Deudero S. (2023). The hyperbenthic environment: A forgotten habitat for plastic pollution. Mar. pollut. Bull. 194. doi: 10.1016/j.marpolbul.2023.115291
Fallati L., Polidori A., Salvatore C., Saponari L., Savini A., Galli P. (2019). Anthropogenic marine debris assessment with unmanned aerial vehicle imagery and deep learning: a case study along the beaches of the Republic of Maldives. Sci Total Environ 693, 133581. doi: 10.1016/j.scitotenv.2019.133581
Fan J., Liu C. (2023). Multitask GANs for oil spill classification and semantic segmentation based on SAR images. IEEE J. Select. Topics Appl. Earth Observ. Remote Sens. 16, 2532–2546. doi: 10.1109/JSTARS.2023.3249680
Fan J., Zhang S., Wang X., Xing J. (2023). Multifeature semantic complementation network for marine oil spill localization and segmentation based on SAR images. IEEE J. Select. Topics Appl. Earth Observ. Remote Sens. 16, 3771–3783. doi: 10.1109/JSTARS.2023.3264007
Ferreira N. M., Coutinho R., Souza de Oliveira L. (2023). Emerging studies on oil pollution biomonitoring: A systematic review. Environ. pollut. 192. doi: 10.1016/j.marpolbul.2023.115081
Fix E., Hodges J. L. (1951). Discriminatory Analysis, Nonparametric Discrimination: Consistency Properties Report (USAF School of Aviation Medicine). Available at: https://apps.dtic.mil/dtic/tr/fulltext/u2/a800276.pdf (Accessed April 2022).
Ford H. V., Jones N. H., Davies A. J., Godley B. J., Jambeck J. R., Napper I. E., et al. (2022). The fundamental links between climate change and marine plastic pollution. Sci. Total Environ. 806. doi: 10.1016/j.scitotenv.2021.150392
Frazier P. I. (2018). A tutorial on bayesian optimization, machine learning optimization and control. doi: 10.48550/arXiv.1807.02811
Fulton M., Hong J., Islam M. J., Sattar J. (2019). “Robotic detection of marine litter using deep visual detection models,” in International Conference on Robotics and Automation ICRA. doi: 10.1109/icra.2019.8793975
Garcia-Garin O., Monleón-Getino T., López-Brosa P. (2021). Automatic detection and quantification of floating marine macro-litter in aerial images: introducing a novel deep learning approach connected to a web application in R. Environ. pollut. 273. doi: 10.1016/j.envpol.2021.116490
GES (2020). Good Environmental Status (European Commission, Environment, Marine and Coast). Available at: https://ec.europa.eu/environment/marine/good-environmental-status/index_en.htm (Accessed April 2022).
Ghara F. M., Shokouhi S. B., Akbarizadeh G. (2022). A new technique for segmentation of the oil spills from synthetic-aperture radar images using convolutional neural network. IEEE J. Select. Topics Appl. Earth Observ. Remote Sens. 15, 8834–8844. doi: 10.1109/JSTARS.2022.3213768
Girshick R., Donahue J., Darrell T., Malik J. (2014). Rich feature hierarchies for accurate object detection and semantic segmentation. CVPR 15, 8834–8844. doi: 10.1109/cvpr.2014.81
Gonçalves G., Andriolo A., Pinto Luís, Duarte Diogo (2020b). Mapping marine litter with unmanned aerial systems: A showcase comparison among manual image screening and machine learning techniques. Mar. pollut. Bull. 155, 111158. doi: 10.1016/j.marpolbul.2020.111158
Gonçalves G., Andriolo U., Pinto L., Bessa F. (2020a). Mapping marine litter using U.A.S. on a Beach-Dune System: A Multidisciplinary Approach. Sci. Total Environ. 706, 135742. doi: 10.1016/j.scitotenv.2019.135742
Goodfellow I. J., Bengio Y., Courville A. (2016). Deep Learning (M.I.T. Press), 706. Available at: https://www.deeplearningbook.org/ (Accessed April 2022).
Grant M. J., Booth A. (2009). A typology of reviews: an analysis of 14 review types and associated methodologies: A typology of reviews. Health Inf. Libraries J. 26. doi: 10.1111/j.1471-1842.2009.00848.x
Green A. A., Berman M., Switzer P., Craig M. D. (1988). A transformation for ordering multispectral data in terms of image quality with implications for noise removal. IEEE Trans. Geosci. Remote Sens. 26, 65–74. doi: 10.1109/36.3001
Guo W., Yang W., Zhang H., Hua G. (2018). Geospatial Object Detection in High Resolution Satellite Images Based on Multi-Scale Convolutional Neural Network. Remote Sensing. 10 (1), 131. doi: 10.3390/rs10010131
Guo Y., Zhang H. Z. (2014). Oil spill detection using synthetic aperture radar images and feature selection in shape space. Int. J. Appl. Earth Observ. Geoinform. 30. doi: 10.1016/j.jag.2014.01.011
Han X.-L., Jiang N.-J., Hata T., Choi J., Du Y.-J., Wang Y.-J., et al. (2023). Deep learning based approach for automated characterisation of large marine microplastic particles. Mar. Environ. Res. 183, 105829. doi: 10.1016/j.marenvres.2022.105829
Hasimoto-Beltran R., Canul-Ku M., Díaz Méndez G. M., Ocampo-Torres F. J., Esquivel-Trava B. (2023). Ocean oil spill detection from SAR images based on multi-channel deep learning semantic segmentation. Mar Pollut Bull 188, 114651. doi: 10.1016/j.marpolbul.2023.114651
Hastie T., Tibshirani R., Freidman J. (2009). The Elements of Statistical Learning: Data Mining. Inference, Prediction. Available online at: https://hastie.su.domains/ElemStatLearn/printings/ESLII_print12_toc.pdf (Accessed April 2022).
He K., Zhang X., Ren S., Sun J. (2015). Deep Residual Learning for Image Recognition (CVPR). doi: 10.48550/arXiv.1512.03385
Helinski O. K., Poor C. J., Wolf J. M. (2021). Ridding our rivers of plastic: A framework for plastic pollution capture device selection. Mar. pollut. Bull. 165, 112095. doi: 10.1016/j.marpolbul.2021.112095
Hengstmann E., Fischer E. K. (2020). Anthropogenic litter in freshwater environments – study on lake beaches evaluating marine guidelines and aerial imaging. Environ. Res. 189. doi: 10.1016/j.envres.2020.109945
Hidaka M., Matsuoka D., Sugiyama D., Murakami K., Kako S. (2022). Pixel-level image classification for detecting beach litter using a deep learning approach. Mar. pollut. Bull. 175, 13371. doi: 10.1016/j.marpolbul.2022.113371
Hinton G. E., Srivastava N., Swersky K. (2012). “Neural Networks for Machine Learning Lecture 6a Overview of mini-batch Gradient Descent,” in Neural Networks for Machine Learning. Available at: https://www.cs.toronto.edu/~tijmen/csc321/slides/lecture_slides_lec6.pdf (Accessed April 2022).
Hou Y., Zhao H. (2017). “Handwritten digit recognition based on depth neural network,” in International Conference on Intelligent Informatics and Biomedical Sciences. doi: 10.1109/iciibms.2017.8279710
Hu C. (2022). Remote detection of marine debris using sentinel-2 imagery: A cautious note on spectral interpretations. Mar. pollut. Bull. 183. doi: 10.1016/j.marpolbul.2022.114082
Iordache M.-D., De Keukelaere L., Moelans R., Landuyt L., Moshtaghi M., Corradi P., et al. (2022). Targeting plastics: machine learning applied to litter detection in aerial multispectral images. Remote Sens. 14, 5820. doi: 10.3390/rs14225820
Jakovljevic G., Govedarica M., Alvarez-Taboada F. (2020). A deep learning model for automatic plastic mapping using unmanned aerial vehicle data. Remote Sens. 12. doi: 10.3390/rs12091515
Jégou S., Drozdzal M., Vazquez D., Romero A., Bengio Y. (2017). The One Hundred Layers Tiramisu: Fully Convolutional DenseNets for Semantic Segmentation (CVPR), Honolulu, HI, USA, 1175–1183. doi: 10.1109/CVPRW.2017.156
Jia T., Kapelan Z., Vries R., Vriend P., Copius Peereboom E., Okkerman I., et al. (2023a). Deep learning for detecting macroplastic litter in water bodies: A review. Water Res. 231, 119632. doi: 10.1016/j.watres.2023.119632
Jia T., Vallendar A. J., de Vries R., Kapelan Z., Taormina R. (2023b). Advancing deep learning-based detection of floating litter using a novel open dataset. Front. Water 5. doi: 10.3389/frwa.2023.1298465
Jiao Z., Jia G., Cai Y. (2019). A new approach to oil spill detection that combines deep learning with unmanned aerial vehicles. Comput. Ind. Eng. 135 pp, 1300–1311. doi: 10.1016/j.cie.2018.11.008
Kalter V., Passow U. (2023). Quantitative review summarising the effects of oil pollution on subarctic and arctic marine invertebrates. Environ. pollut. 319. doi: 10.1016/j.envpol.2022.120960
Konya A., Peyman N. (2024). Recent applications of AI to environmental disciplines: A review. Sci. Total Environ. 906. doi: 10.1016/j.scitotenv.2023.167705
Krestenitis M., Orfanidis G., Ioannidis K., Avgerinakis K., Vrochidis S., Kompatsiaris I. (2019). Oil spill identification from satellite images using deep neural networks. Remote Sens. 11, 1762. doi: 10.3390/rs11151762
Kylili K., Artusi A., Hadjistassou C. (2021). A new paradigm for estimating the prevalence of plastic litter in the marine environment. Mar. pollut. Bull. 173. doi: 10.1016/j.marpolbul.2021.113127
Kylili K., Kyriakides I., Artusi A., Hadjistassou C. (2019). Identifying floating plastic marine debris using a deep learning approach. Environ. Sci. pollut. Res. 26, 17091–17099. doi: 10.1007/s11356-019-05148-4
Lee J.-S., Cloude S. R., Papathanassiou K. P., Grunes M. R., Woodhouse I. H. (2003). Speckle filtering and coherence estimation of polarimetric SAR interferometry data for forest applications. IEEE Trans. Geosci. Remote Sens. 4110, 2254–2263. doi: 10.1109/TGRS.2003.817196
Leistenschneider D., Wolinski A., Cheng J., ter Halle A., Duflos G., Huvet A., et al. (2023). A critical review on the evaluation of toxicity and ecological risk assessment of plastics in the marine environment. Sci. Total Environ. 896, 164955. doi: 10.1016/j.scitotenv.2023.164955
Lincoln S., Andrews B., Birchenough S. N. R., Chowdhury P., Engelhard G. H., Harrod O., et al. (2022). Marine litter and climate change: inextricably connected threats to the worlds’s oceans. Sci. Total Environ. 837, 155709. doi: 10.1016/j.scitotenv.2022.155709
Liu B., Li Y., Chen P., Zhu X. (2016). Extraction of oil spill information using decision tree based minimum noise fraction transform. J. Indian Soc. Remote Sens. 44, 421–426. doi: 10.1007/s12524-015-0499-4
Long J., Shelhamer E., Darrell T. (2015). Fully Convolutional Networks for Semantic Segmentation (CVPR). doi: 10.48550/arXiv.1411.4038
Ma J., Ma R., Pan Q., Liang X., Wang J., Ni X. (2023). A global review of progress in remote sensing and monitoring of marine pollution. Water 15. doi: 10.3390/w15193491
MARE (2021). Directorate-General for Maritime Affairs and Fisheries MARE, The EU Blue Economy Report 2021 (EU Science Hub - European Commission). doi: 10.2771/5187
Marin I., Mladenović S., Gotovac S., Zaharija G. (2021). Deep-feature-based approach to marine debris classification. Appl. Sci. 11, 5644. doi: 10.3390/app11125644
Martin C., Parkes S., Zhang Q., Zhang X., McCabe M. F., Duarte C. M., et al. (2018). Use of unmanned aerial vehicles for efficient beach litter monitoring. Mar. pollut. Bull. 131, 662–673. doi: 10.1016/j.marpolbul.2018.04.045
Martin C., Zhang Q., Zhang X., Duarte C. M. (2021a). Enabling a large-scale assessment of litter along Saudi Arabian Red Sea shores by combining drones and machine learning. Environ. pollut. 277, 116730. doi: 10.1016/j.envpol.2021.116730
Martin C., Zhang Q., Zhai D., Zhang X., Duarte C. M. (2021b). Anthropogenic litter density and composition data acquired flying commercial drones on sandy beaches along the Saudi Arabian Red Sea. Data Brief 36, 107056. doi: 10.1016/j.dib.2021.107056
Matas J., Chum O., Urban M., Pajdla T. (2004). Robust wide baseline stereo from maximally stable extremal regions. Image Vision Comput. 22, 761–767. doi: 10.1016/j.imavis.2004.02.006
McHugh M. L. (2012). Interrater reliability: the kappa statistic. Biochem. Med. 22, 276–282. doi: 10.11613/BM.2012.031
Meyerjürgens J., Ricker M., Aden C., Albinus M., Barrelet J., Freund H., et al. (2023). Sources, pathways and abatement strategies of macroplastic pollution: an interdisciplinary approach for the Southern North Sea. Front. Mar. Sci. doi: 10.3389/fmars.2023.1148714
Mohri M., Rostamizadeh A., Talwalkar A. (2018). Foundations of Machine Learning 2nd ed (M.I.T. Press). Available at: https://mitpress.mit.edu/9780262039406/foundations-of-machine-learning/ (Accessed April 2022).
Moorton Z., Kurt Z., Woo W. L. (2022). Is the use of deep learning an appropriate means to locate debris in the ocean without harming aquatic wildlife? Mar. pollut. Bull. 181. doi: 10.1016/j.marpolbul.2022.113853
MSFD (2008). Marine Strategy Framework Directive 2008/56/E.C. European Parliament and Council. Available online at: https://eur-lex.europa.eu/legal-content/en/ALL/?uri=CELEX%3A32008L0056 (Accessed April 2022).
Muller-Karger F. E. (1992). Remote sensing of marine pollution: A challenge for the 1990s. Mar. pollut. Bull. 25, 54–60. doi: 10.1016/0025-326x9290186-a
Nama S., Shanmughan A., Nayak B. B., Bhushan S., Ramteke K. (2023). Impacts of marine debris on coral reef ecosystem: A review of conservation and ecological monitoring of the coral reef ecosystem. Mar. pollut. Bull. 189, 114755. doi: 10.1016/j.marpolbul.2023.114755
NAOO (2022). Where does Marine Debris come from? (U.S. Department of Commerce, NAOO, National Ocean Service). Available at: https://marinedebris.noaa.gov/discover-marine-debris (Accessed April 2022).
NASA (2023). Oceanography, Earth (National Aeronautics and Space Administration). Available at: https://science.nasa.gov/earth-science/focus-areas/oceanography (Accessed April 2022).
OECD (2022). Organisation for Economic Cooperation and Development (Global Plastics Outlook, The Ocean). Available at: https://www.oecd.org/environment/plastics/ (Accessed April 2022).
Orfanidis G., Ioannidis K., Avgerinakis K., Vrochidis S., Kompatsiaris I. (2018). “A Deep Neural Network for Oil Spill Semantic Segmentation in Sar Images,” 2018 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece, 2018, pp. 3773–3777. doi: 10.1109/ICIP.2018.8451113
Otsu N. (1979). A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybernetics 9, 62–66. doi: 10.1109/TSMC.1979.4310076
Panwar H., Gupta P., Siddiqui M. K., Morales-Menendez R., Bhardwaj P., Sharma S., et al. (2020). AquaVision: automating the detection of waste in water bodies using deep transfer learning. Case Stud. Chem. Environ. Eng. 2, 100026. doi: 10.1016/j.cscee.2020.100026
Papachristopoulou I., Filippides A., Fakiris E., Papatheodorou G. (2020). Vessel-based Photographic Assessment of Beach Litter in Remote Coasts. A wide scale application in Saronikos Gulf, Greece. Mar. pollut. Bull. 150, 110684. doi: 10.1016/j.marpolbul.2019.110684
Patil P., Virdin J., Diaz M., Roberts J., Singh A. (2016). Toward a Blue Economy: A Promise for Sustainable Growth in the Caribbean: An Overview (Washington D.C: The World Bank). Available at: https://api.semanticscholar.org/CorpusID:157101623 (Accessed April 2022).
Pauli G. (2010). The Blue Economy: Towards a Culturally Rich and Sustainable Society with Economic Growth (The Blue Economy Organisation). Available at: https://www.theblueeconomy.org/en/ (Accessed April 2022).
Pérez-Beltrán C. H., Robles A. D., Rodriguez N. A., Ortega-Gavilán F., Jiménez-Carvelo A. M. (2024). Artificial intelligence and water quality: from drinking water to wastewater. Trends Anal. Chem. 172, 117597. doi: 10.1016/j.trac.2024.117597
Pinto L., Andriolo U., Gonçalves G. (2021). Detecting stranded macro-litter categories on drone orthophoto by a multi-class neural network. Mar. pollut. Bull. 169. doi: 10.1016/j.marpolbul.2021.112594
PlasticFinder (2017). PlasticFinder - Italian software license 012677 D011755 (Deep Trace Technologies). Available at: http://www.deeptracetech.com/about.html (Accessed April 2022).
Politikos D. V., Adamopoulou A., Petasis G., Galgani F. (2023). Using artificial intelligence to support marine macrolitter research: A content analysis and an online database. Ocean Coast. Manage. 233, 106466. doi: 10.1016/j.ocecoaman.2022.106466
Politikos D. V., Fakiris E., Davvetas A., Klampanos I. A., Papatheodorou G. (2021). Automatic detection of seafloor marine litter using towed camera images and deep learning. Mar. pollut. Bull. 164, 111974. doi: 10.1016/j.marpolbul.2021.111974
Prakash N., Stahl F., Mueller C. L., Ferdinand O., Zielinski O. (2021). Intelligent Marine Pollution Analysis on Spectral Data (San Diego – Porto, San Diego, CA, USA: OCEANS 2021), 1–6. doi: 10.23919/OCEANS44145.2021.9706056
Redmon J., Divvala S., Girschick R., Farhadi A. (2015). You Only Look Once: Unified, Real-Time Object Detection (CVPR). doi: 10.48550/arXiv.1506.02640
Ren S., He K., Girshick R., Sun J. (2016). Faster R-CNN: towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 39, 1137–1149. doi: 10.1109/tpami.2016.2577031
Rodrigues F. H., Kolya A. A., Veiga V. M., Felix dos Santos S., Wieczorek A., dos Santos Corrêa C. V., et al. (2023). Oil spill environmental sensitivity mapping of Rio de Janeiro, Brazil. Mar. pollut. Bull. 197. doi: 10.1016/j.marpolbul.2023.115682
Rosenblatt F. (1958). The perceptron: A probabilistic model for information storage and organization in the brain. psychol. Rev. 65, 386–408. doi: 10.1037/h0042519
Ryazanov I., Nylund A. T., Basu D., Hassellöv I.-M., Schliep A. (2021). Deep learning for deep waters: an expert-in-the-loop machine learning framework for marine sciences. J. Mar. Sci. Eng. 9, 169. doi: 10.3390/jmse9020169
Salgado-Hernanz P. M., Bauzà J., Alomar C., Compa M., Romero L., Deudero S. (2021). Assessment of marine litter through remote sensing: recent approaches and future goals. Mar. pollut. Bull. 168, 112347. doi: 10.1016/j.marpolbul.2021.112347
Sandler M., Howard A., Zhu M., Zhmoginov A., Chen L.-C. (2018). MobileNetV2: Inverted Residuals and Linear Bottlenecks (Salt Lake City, UT, USA: CVPR), 4510–4520. doi: 10.1109/cvpr.2018.00474
Sannigrahi S., Basu B., Sarkar Basu A., Pilla F. (2022). Development of an automated marine floating plastic detection system using sentinel-2 imagery and machine learning models. Mar. pollut. Bull. 178, 113527. doi: 10.1016/j.marpolbul.2022.113527
Seydi S. T., Hasanlou M., Amani M., Huang W. (2021). Oil spill detection based on multi-scale multidimensional residual CNN for optical remote sensing imagery. IEEE J. Select. Topics Appl. Earth Observ. Remote Sens. 14, 10941–10952. doi: 10.1109/JSTARS.2021.3123163
Shaban M., Salim R., Khalifeh H., Khelifi A., Shalaby A., El-Mashad S., et al. (2021). A deep-learning framework for the detection of oil spills from S.A.R. Data. Sensors 21, 2351. doi: 10.3390/s21072351
Sharma S., Sharma V., Chatterjee S. (2023). Contribution of plastic and microplastic to global climate change and their conjoining impacts on the environment – A review. Sci. Total Environ. 875. doi: 10.1016/j.scitotenv.2023.162627
Smail E. A., DiGiacomo P. M., Seeyave S., Djavidnia S., Celliers L., Le Traon P. Y., et al. (2019). An introduction to the ‘Oceans and society: blue planet’ Initiative. J. Oper. Oceanogr. 12, S1–S11. doi: 10.1080/1755876X.2019.1634959
Song K., Jung J.-Y., Lee S. H., Park S. (2021). A comparative study of deep learning-based network model and conventional method to assess beach debris stranding-stock. Mar. pollut. Bull. 168, 112466. doi: 10.1016/j.marpolbul.2021.112466
Song D., Zhen Z., et al. (2020). A novel marine oil spillage identification scheme based on convolution neural network feature extraction from fully polarimetric SAR imagery. IEEE Access 8, 59801–59820. doi: 10.1109/access.2020.2979219
Su J., Zhang F., Yu C., Zhang Y., Wang J., Wang C., et al. (2023). Machine learning: next promising trend for microplastics study. Sci. Total Environ. 344, 118756. doi: 10.1016/j.jenvman.2023.118756
Tedesco P., Balzano S., Coppola D., Palma Esposito F., de Pascale D., Denaro R., et al. (2024). Bioremediation for the recovery of oil polluted marine environment, opportunities and challenges approaching the blue growth. Mar. pollut. Bull. 200, 116157. doi: 10.1016/j.marpolbul.2024.116157
Teng C., Kylili K., Hadjistassou C. (2022). Deploying deep learning to estimate the abundance of marine debris from video footage. Mar. pollut. Bull. 183, 114049. doi: 10.1016/j.marpolbul.2022.114049
Tong S., Liu X., Chen Q., Zhang Z., Xie G. (2019). Multi-feature based ocean oil spill detection for polarimetric S.A.R. Data using random forest and the self-similarity parameter. Remote Sens. 11, 451. doi: 10.3390/rs11040451
Topouzelis K., Psyllos A. (2012). Oil spill feature selection and classification using decision tree forest on SAR image data. ISPRS J. Photogramm. Remote Sens. 68. doi: 10.1016/j.isprsjprs.2012.01.005
Tran T. L. C., Huang Z.-C., Tseng K.-H., Chou P.-H. (2022). Detection of bottle marine debris using unmanned aerial vehicles and machine learning techniques. Drones 6, 401. doi: 10.3390/drones6120401
Trujillo-Acatitla R., Tuxpan-Vargas J., Ovando-Vázquez C. (2022). Oil spills: detection and concentration estimation in satellite imagery, A machine learning approach. Mar. pollut. Bull. 184, 114132. doi: 10.1016/j.marpolbul.2022.114132
UN (2022). Sustainable Development Goals Report (United Nations). Available at: https://unstats.un.org/sdgs/report/2022/ (Accessed April 2022).
UNEP (2022). Global Environment Outlook – GEO-6: Healthy Planet, Healthy People (United Nations Environment Programme). Available at: https://www.unep.org/resources/global-environment-outlook-6 (Accessed April 2022).
UNFCCC (2024). United Nations Climate Change. Conference of the Parties (COP29). Nov. 11 – 22, Baku, Azerbaijan. Available at: https://unfccc.int/cop29.
Valdenegro-Toro M. (2016). Submerged marine debris detection with autonomous underwater vehicles, in International Conference on Robotics and Automation for Humanitarian Applications. doi: 10.1109/raha.2016.7931907
Vasconcelos R. N., Lima A. T. C., Lentini C. A. D., Miranda J. G. V., de Mendonça L. F. F., Lopes J. M., et al. (2023). Deep learning-based approaches for oil spill detection: A bibliometric review of research trends and challenges. J. Mar. Sci. Eng. 11, 1406. doi: 10.3390/jmse11071406
Veettil B. K., Quan N. H., Hauser L. T., Doan Van D., Quang N. X. (2022). Coastal and marine plastic litter monitoring using remote sensing: A review. J. Environ. Manage. 279, 108160. doi: 10.1016/j.ecss.2022.108160
Wang J., Sun K., Cheng T., Jiang B., Deng C., Yang C., et al. (2021). Deep high-resolution representation learning for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 43, 3349–3364. doi: 10.1109/TPAMI.2020.2983686
Wang Y., Wang L., Chen X., Liang D. (2022). Offshore petroleum leaking source detection method from remote sensing data via deep reinforcement learning with knowledge transfer. IEEE J. Select. Topics Appl. Earth Observ. Remote Sens. 15, 5826–5840. doi: 10.1109/JSTARS.2022.3191122
Wishart J. (1928). The generalised product moment distribution in samples from a normal multivariate population. Biometrika 20A, 1–2, 32-52. doi: 10.1093/biomet/20A.1-2.32
Xue B., Huang B., Wei W., et al. (2021). An efficient deep-sea debris detection method using deep neural networks. IEEE J. Select. Topics Appl. Earth Observ. Remote Sens. 14, 12348–12360. doi: 10.1109/JSTARS.2021.3130238
Yang Z., Yu X., Dedman S., Rosso M., Zhu J., Yang J., et al. (2022a). UAV remote sensing applications in marine monitoring: knowledge visualisation and review. Sci. Total Environ. 838, 155939. doi: 10.1016/j.scitotenv.2022.155939
Zeng K., Wang Y. (2020). A deep convolutional neural network for oil spill detection from spaceborne SAR images. Remote Sens. 12 (6), 1015. doi: 10.3390/rs12061015
Zhang J., Feng H., Luo Q., Li Y., Zhang Y., Li J., et al. (2022). Oil spill detection with dual-polarimetric sentinel-1 SAR using superpixel-level image stretching and deep convolutional neural network. Remote Sens. 14, 3900. doi: 10.3390/rs14163900
Zhang Y., Zhang D., Zhang Z. (2023). A critical review on artificial intelligence – based microplastics imaging technology: recent advances, hot-spots and challenges. Int. J. Environ. Res. Public Health 20. doi: 10.3390/ijerph20021150
Keywords: oil pollution, litter pollution, artificial intelligence, machine learning, deep learning, spectral analysis, real-time monitoring, synthetic data
Citation: Prakash N and Zielinski O (2025) AI-enhanced real-time monitoring of marine pollution: part 1-A state-of-the-art and scoping review. Front. Mar. Sci. 12:1486615. doi: 10.3389/fmars.2025.1486615
Received: 29 August 2024; Accepted: 20 March 2025;
Published: 28 April 2025.
Edited by:
Wupeng Xiao, Xiamen University, ChinaCopyright © 2025 Prakash and Zielinski. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Navya Prakash, bmF2eWEucHJha2FzaEB1bmktb2xkZW5idXJnLmRl