 Wenjun Liu
Wenjun Liu Guang Chen
Guang Chen Alois Knoll
Alois Knoll- 1Department of Informatics, Technical University of Munich, Munich, Germany
- 2School of Automotive Studies, Tongji University, Shanghai, China
In this paper, we design a robust model predictive control (MPC) controller for vehicle subjected to bounded model uncertainties, norm-bounded external disturbances and bounded time-varying delay. A Lyapunov-Razumikhin function (LRF) is adopted to ensure that the vehicle system state enters in a robust positively invariant (RPI) set under the control law. A quadratic cost function is selected as the stage cost function, which yields the upper bound of the infinite horizon cost function. A Lyapunov-Krasovskii function (LKF) candidate related to time-varying delay is designed to obtain the upper bound of the infinite horizon cost function and minimize it at each step by using matrix inequalities technology. Then the robust MPC state feedback control law is obtained at each step. Simulation results show that the proposed vehicle dynamic controller can steer vehicle states into a very small region near the reference tracking signal even in the presence of external disturbances, model uncertainties and time-varying delay. The source code can be downloaded on https://github.com/wenjunliu999.
1. Introduction
Dynamic control is one of the most crucial tasks for autonomous driving vehicle (Chen et al., 2020). H-infinity output feedback controller (Hu et al., 2016), sliding mode controller (Jiang and Wu, 2018), model predictive control (MPC) (Sun et al., 2019), etc. have been designed for vehicle control. Because MPC has the ability to incorporate soft and hard constraints into the online optimizations in a multivariable control framework, it is widely applied in vehicle control field (Hu et al., 2019).
Vehicle dynamic control performance may be seriously affected by external disturbances resulting from unpredictable environment (Yu et al., 2019). Besides, it is impossible to establish a precise vehicle model when the vehicle is moving (Liu et al., 2019). Therefore, robust model predictive control for vehicle is researched by scholars. Robust feedback MPC (Shamaghdari et al., 2015), tube-based robust MPC (Sakhdari and Azad, 2018), min-max robust MPC (Wang X. et al., 2016), feedback min-max MPC (Liu et al., 2014) and linear matrix inequities (LMIs) or bilinear matrix inequities (BMIs) based robust MPC (Cheng et al., 2020) have been proposed to deal with vehicle control where the vehicle has model uncertainties or external disturbances or both model uncertainties and external disturbances. The optimization problems involving LMIs or BMIs are convex and hence have solvable global optimal solutions and can be solved numerically efficiently and reliably (Duan and Yu, 2013). So, LMIs or BMIs based robust MPC control is widely applied to vehicle control. However, most of existing LMIs or BMIs based robust MPC vehicle control papers only consider the model uncertainties. Few matrix inequalities based robust MPC papers consider both model uncertainties and external disturbances of vehicle.
Moreover, time delay can be frequently seen in vehicle system (Ren et al., 2019) and affects the vehicle dynamic control performance and even threatens the stability and safety of the vehicle system. Some literatures concerned MPC controller for time-delay vehicle system have been addressed (Liu and Li, 2019; Wang et al., 2019). However, most existing papers often assume that the delay is known and fixed (Yu et al., 2018), or do not consider the model uncertainties (Xu et al., 2020) or the external disturbances (Bououden et al., 2016; Nahidi et al., 2019). Therefore, the research on robust MPC controller for vehicle with time-varying delay has not been completely investigated and hence several problems still remain unsolved.
Due to the fact that the influence of the delayed states can cause a violation of the monotonic decrease condition that a standard Lyapunov function obeys, systems affected by delays can not apply the classical Lyapunov theory directly (Gielen et al., 2012a). Generally, there are two types of approaches to deal with time-delay systems, Lyapunov-Razumikhin function (LRF) and Lyapunov-Krasovskii function (LKF) (Teng, 2018). In our paper, we focus on discrete vehicle dynamic control. For discrete-time systems, LKF makes use of an augmentation of the state vector with all delayed states, which yields the applications of classical Lyapunov methods to an augmented system without delay (Teng et al., 2017). LRF is constructed for time-delay system based on a type of small-gain condition (Teel, 1998) and can be considered as a special case of LKF. Compared to LKF, LRF is conservative but its computational complexity is lower than LKF (Gielen et al., 2012b).
In this paper, the aim of dynamic control is to guarantee the vehicle dynamic state tracking performance, where the vehicle dynamic state tracking reference signal is determined by the upper kinematic control and assumed to be known in this paper. To suppress the influence of model uncertainties, external disturbances, and time-varying delay on vehicle dynamic state tracking performance, we design a matrix inequalities based robust MPC controller. It is known that robust positively invariant (RPI) set plays an crucial role in robust MPC, the control law involved in RPI can ensure that when the system state enters the RPI set, it never goes out (Yang and Feng, 2013). A LRF candidate is adopted to guarantee this. Since the infinite horizon cost function can not be optimized online, a cost function with finite terms is usually considered instead. To compute the bound of the infinite horizon cost function, a LKF candidate related to time-varying delay is designed in this paper. Then, the robust MPC state feedback control law is obtained by minimizing the upper bound at each step using matrix inequalities technology.
Different from existing researches, there are two main contributions of this paper. Firstly, the vehicle dynamic model simultaneously considers model uncertainties, external disturbances and the time-varying delay of the vehicle state, which is more in line with actual vehicle operating conditions. Then a robust MPC controller is designed to steer vehicle states into a very small region near the reference tracking signal even in the presence of external disturbances, model uncertainties and time-varying delay. Secondly, compared to the robust controller considering fixed time delay, a delay-range-dependent LKF is designed by using the information of the upper and lower bounds of the time-varying delay and relaxed technique, which also simultaneously takes model uncertainties, external disturbances and the time-varying delay into account.
The rest of this paper is structured as follows. In section 2, two auxiliary lemmas and vehicle model are introduced. In section 3, the proposed robust MPC controller for vehicle subjected to bounded model uncertainties, norm-bounded external disturbances and bounded time-varying delay is designed. In section 4, simulation examples are illustrated to verify the effectiveness of the proposed method. Finally, we conclude in section 5.
Notations: I is an identity matrix with appropriate dimension. diag{⋯ } denotes a block-diagonal matrix, ||·|| denotes 2-norm. X > 0 and X ≥ 0 denotes the matrix is a positive definite matrix and positive semi-definite matrix, respectively. The symbol * induces a symmetric structure or a transpose item, e.g., when H and R are symmetric matirces, then
when the expression has the format Q + S + ST, we simplify it to Q + S + *.
2. Preliminaries
In this section, we first introduce two necessary lemmas and then derive the dynamic model of the vehicle with model uncertainties, external disturbances, and time-varying delay.
2.1. Auxiliary Lemmas
Lemma 1: (Duan and Yu, 2013) Let X ∈ Rm × n, Y ∈ Rn × m, Q ∈ Rm × m. Then
holds for all FTF ≤ I if and only if there exits a positive scalar δ, such that
Lemma 2: (Jiang and Wang, 2001) If an input-to-state (ISS) Lyapunov function can be found for system x(k + 1) = f(x(k), p(k)), then the system is ISS.
The definition of ISS-Lyapunov function is as follows.
If a continuous function satisfy the following inequalities, then it is an ISS-Lyapunov function for system x(k + 1) = f(x(k), p(k)) (Yang and Feng, 2013).
where β1, β2, and β3 are K∞-function, ϕ is K-function, x denote system state vector and p denote external disturbances.
2.2. Vehicle Dynamic Model
An extensively used two-degree-of-freedom bicycle model of vehicle dynamics is adopted in this paper and is shown in Figure 1. This model is based on the assumption of small slip angles, no road gradient or bank angles, no load transfer and no rolling or pitching moment. Only the front wheel is steerable in this case (Elbanhawi et al., 2018). The two front wheels and the two rear wheels are respectively represented by one front wheel A and one rear wheel B. The center of gravity (c.g.) of the vehicle is at point C. The distances of A and B from the c.g. of the vehicle are lf and lr respectively. v is the velocity at the c.g. of the vehicle, β is the sideslip angle, δ is the steering angle and r is the yaw rate. The dynamic model with regard of yaw rate and sideslip angle is adopted in this paper, as presented in (1). The detailed derivation process can be found in Rajamani (2011). m is the mass of the vehicle, Cαf and Cαr are the cornering stiffness of the front and rear tires respectively, Iz is yaw moment of inertia. vx is vehicle longitudinal velocity. Similar to Cho and Huh (2019), a fixed forward velocity assumption is adopted in this paper.
Let x = [β r]T, then the state space form of lateral dynamics model can be denoted as follows:
We discretize the continuous model (6) and consider norm-bounded external disturbances p. p satisfies ||p|| ≤ ρ. Then the system model can be written as follows:
where E is a constant coefficient matrix, Am and B can be calculated by the Euler method as:
where T is the sampling interval for the discrete state space model.
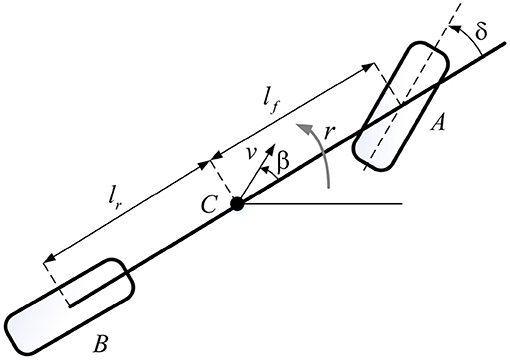
Figure 1. Two-degree-of-freedom bicycle model of vehicle.
Then we consider time-varying delay, the system model can be written as follows:
where A = αAm, Ad = (1−α)Am, xd(k) = x(k − dk), dk is a time-varying delay bounded in [dm, dM], dm, dM are known positive integers, the constant α is the retarded coefficient ranging α ∈ [0, 1], the limits 1 and 0 correspond to no delay term and to a completed delay term, respectively (Jeong and Park, 2005).
It is almost impossible for us to establish a precise model of a vehicle especially when it is moving. So model uncertainties must be considered during the vehicle controller design process.
where , , , M, NA, NAd and NB are constant matrices, H is Lebesgue measurable and satisfies HTH ≤ I.
3. Robust MPC Controller Design Using Matrix Inequalities
In this section, we derive the matrix inequalities involved in the robust MPC controller. MPC is actually an online optimization algorithm. At each iteration time, MPC controller optimizes a cost function and satisfies the corresponding constraints. We first introduce the design of online MPC controller, then we discuss the RPI conditions and develop the computation of a RPI set. Finally, we construct the whole control algorithm.
3.1. Online Robust MPC Design
In this paper, the quadratic cost function with infinite length is defined as
where ℓ(k + i ∣ k) = xT(k + i ∣ k)Qx(k + i ∣ k) + δT(k + i ∣ k)Rδ(k + i ∣ k) − τpT(k + i ∣ k)p(k + i ∣ k), Q and R are positive definite matrices, τ is a positive constant. x(k + i ∣ k) and δ(k + i ∣ k) represent the i-th predictive state and control input at time k respectively. The choice of l(·) is inspired by H∞ MPC (Mayne et al., 2000) and has already been applied to existing robust MPC research (Yang et al., 2013).
The goal is to find a stabilizing state feedback control δ(k) = Kx(k) for system (12) by using the robust MPC strategy, the online robust MPC optimization can be summarized as:
where δmax is the input constraint.
Considering J∞(k) can not be minimized directly in reality, an upper bound of the infinite horizon cost function is minimized instead. To find an upper bound of J∞(k), a LKF candidate related to time-varying delay is designed as follows:
where P = PT > 0, . And suppose the following inequality is satisfied.
As shown in Kothare et al. (1996), for the robust performance objective function to be finite, we must have x(∞∣k) = 0 and hence V(x(∞∣k)) = 0. Summing (19) from i = 0 to i = ∞, we get
where ξ(k) > 0 is the upper bound of J∞(k).
Theorem 1: If there exit matrices with appropriate dimension X = XT > 0, , a general matrix Y and a scalar η > 0, then the following LMIs can be derived to guarantee (19) i.e., to guarantee V(x(k ∣ k)) is the upper bound of J∞(k).
where ds = dM − dm.
Proof: See Appendix A.
Equation (21) can guarantee ξ(k) is the upper bound of J∞(k), then we minimize it.
Theorem 2: ξ(k) can be minimized using the following LMIs.
where .
Proof:
where .
where , Λ2 = diag(dsPd, (ds−1)Pd, ⋯ , Pd).
Summing (16), (23), (24), we can conclude that
Substituting , then by using Schur complement, (22) can be obtained.
3.2. Robust Positively Invariant Set Computation
In this section, we design a LRF to compute RPI set. The RPI set is defined as follows:
Lemma 3: Consider system (12), the set Ω is a RPI if there exists a positive scalar γ ∈ (0, 1) such that:
Proof:
According to (27), and PTP ≤ ρ2, we have:
So we can get xT(k + 1)Px(k + 1) ≤ ξ, that means x(k + 1) is still in the RPI set.
Theorem 3: If there exists a positive definite matrix X, a general matrix Y and positive scalars σ and λ, such that the following BMIs and LMIs hold.
where γ + γd = 1, , Ztt is the t-th diagonal element of matrix Z.
Proof: See Appendix B.
3.3. Online Robust MPC Algorithm
We summarize the robust MPC algorithm based on the above-mentioned results. The implementation of the robust controller is summarized as follows.
Then the control input at time k can be computed δ(k) = Kx(k). Note that (29) is BMIs, in our paper, to reduce the computation burden, we only calculate the optimal λ* of λ at the initial time, and replace λ with λ* in subsequent iterations.
Theorem 4: If the optimization problem (31) is solvable for vehicle system (12) at the initial time, then the vehicle system (12) is ISS with regard to the external disturbances.
Proof: See Appendix C.
Remark: In this paper, two Lyapunov functions (LKF and LRF) are used at the same time. But LRF is only used to ensure that the system enters RPI, which provides a tighter constraint. As shown in Gielen et al. (2012a), the existence of a LRF is a sufficient condition for the existence of a LKF.
4. Simulation and Analysis
In this section, we conduct three simulation scenarios to validate the effectiveness of the designed robust MPC controller. The vehicle model parameters m, Iz, lf, lr, Cαf, Cαr, Iz and vx of the simulation vehicle are 1, 000kg, 1, 650kg/m2, 1.0m, 1.6m, 3, 000N/rad, 3, 000N/rad and 10m/s, respectively.
In the first simulation, we assume there is no time-varying delay, 2% model uncertainties are added, i.e., NA = 0.02A, NB = 0.02B. M is an identity matrix, E = [0.01 0.1]T, Q is diag{5, 5}, R is 1, τ is 1. The external disturbances p and are given by p(k) = 1 × 10−7 sin(k), H(k) = sin(k) respectively (At each time step, the magnitude of the increment of β and r are 1 × 10−7 and 1 × 10−6 respectively). The input constraint is ||δ|| ≤ 0.5 rad. The sampling time is 0.01 s. Under the same conditions, we compared the performance of the proposed robust MPC with the traditional MPC algorithm (Elbanhawi et al., 2018) on the reference signal tracking problem. Figure 2A is the sideslip angle tracking performance comparison between the proposed robust MPC and traditional MPC. Figure 2B is the yaw rate tracking performance comparison between the proposed robust MPC and traditional MPC. It can be easily seen that the proposed robust MPC has a good tracking performance even there exist model uncertainties and external disturbances. However, traditional MPC controller becomes unstable and can not execute the control. Please note that the performance of MPC control is seriously degraded in the presence of external disturbances and model uncertainties. To observe the performance comparison of the MPC controller and the proposed robust MPC controller in the same figure more clearly, we only show the MPC controller tracking trajectory for 1s in the figure. Otherwise, the tracking trajectory generated by the robust MPC controller and the desired tracking trajectory will look like a straight line because of the scale.
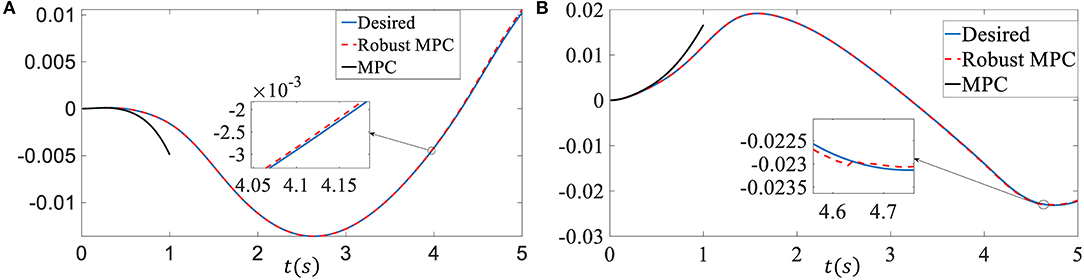
Figure 2. Control performance comparison of the first simulation. (A) Sideslip angle. (B) Yaw rate.
In the second simulation, we assume the vehicle system has time-varying delay, the retarded coefficient α is 0.8, dm is 1, dM is 3, γ is 0.8, γd is 0.2. 5% model uncertainties are added, i.e., NA = 0.05A, NB = 0.05B, NAd = 0.05Ad. M is an identity matrix, E = [0.01 0.1]T, Q is diag{5, 5}, R is 1, τ is 1. The external disturbances p and H are given by p(k) = 1 × 10−3 sin(k), H(k) = sin(k) respectively. The input constraint is ||δ|| ≤ 0.5 rad. The sampling time is 0.01 s. Figure 3 shows the proposed controller can track the reference well when there exist model uncertainties, external disturbances, and time-varying delay. The root mean square error (RMSE) of the sideslip angle tracking error is 7.8719 × 10−6, the RMSE of the yaw rate tracking error is 7.996 × 10−5.
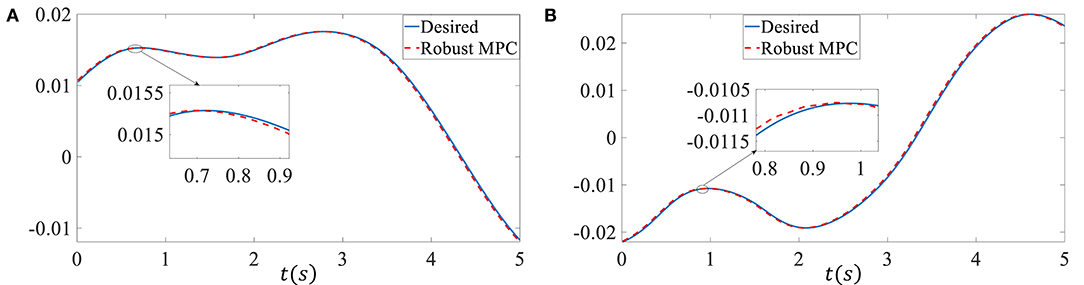
Figure 3. Control performance of the second simulation. (A) Sideslip angle. (B) Yaw rate.
In order to more convincingly verify the effectiveness of the proposed controller, we chose square wave reference signals as the tracking signal in the third simulation. The upper bound of delay is set as dM = 10, the external disturbances p is set as p(k) = 5 × 10−3 sin(k). Other parameters are the same as in simulation 2. As shown in Figure 4, despite the time-varying delay, model uncertainties and external disturbances, the proposed controller can still track the challenging reference signal well. The system states come into a very small region near the neighborhood of the reference tracking trajectory in the presence of a bigger external disturbances. The RMSE of the sideslip angle tracking error is 6.3077 × 10−5, the RMSE of the yaw rate tracking error is 4.8308 × 10−4.
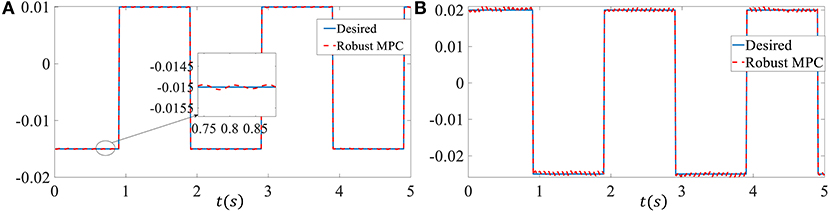
Figure 4. Control performance of the third simulation. (A) Sideslip angle. (B) Yaw rate.
To further verify the robustness of the proposed controller, we consider 10% model uncertainties and the external disturbances p are set as p = 5 × 10−3 sin(0.1πk), where the frequency of the disturbance refers to Wang N. et al. (2016). Other parameters are the same as in simulation 3. The square wave reference signals are also selected as the tracking signal in the this simulation. The performance of the proposed robust MPC controller is shown in Figure 5. The yaw rate tracking performance is a bit worse but it is still stable in the neighborhood of the reference tracking trajectory in the presence of bigger model uncertainties and bigger disturbance frequency.
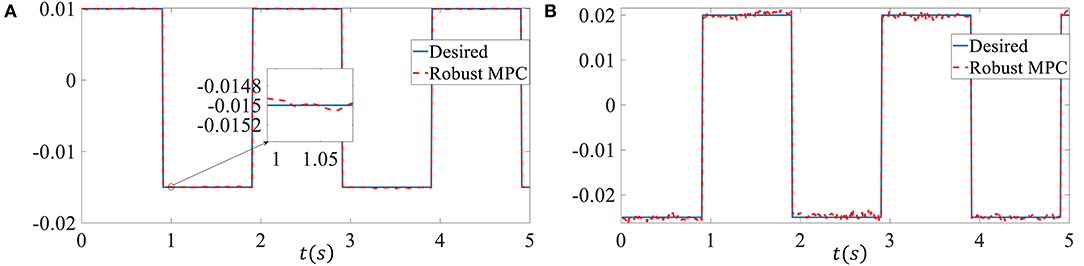
Figure 5. Control performance of the fourth simulation. (A) Sideslip angle. (B) Yaw rate.
5. Conclusion
In this paper, we design a robust MPC controller for vehicle system with model uncertainties, external disturbances, and time-varying delay. A LKF candidate related to time-varying delay is constructed to derive an upper bound of the cost function. A LRF is designed to compute the RPI. The computation of RPI and upper bound of the cost function, input constraint and the minimization problem are expressed as LMIs or BMIs by using matrix technology. Then the MPC state feedback law is calculated in terms of LMIs/BMIs. Simulation results show that the proposed controller is effective.
Data Availability Statement
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author/s.
Author Contributions
WL: methodology, software, data curation, and writing original draft. GC: methodology and data curation. AK: conceptualization, supervision, and writing—review. All authors contributed to the article and approved the submitted version.
Funding
This work was financially supported by the German Research Foundation (DFG) and the Technical University of Munich (TUM) in the framework of the Open Access Publishing Program. This research has also received funding from the European Union's Horizon 2020 Framework Program for Research and Innovation under the Specific Grant Agreement No. 945539 (Human Brain Project SGA3), from the National Natural Science Foundation of China (No. 61906138), and from the Shanghai AI Innovative Development Project 2018.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Supplementary Material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fnbot.2020.617293/full#supplementary-material
References
Bououden, S., Chadli, M., Zhang, L., and Yang, T. (2016). Constrained model predictive control for time-varying delay systems: application to an active car suspension. Int. J. Control Automat. Syst. 14, 51–58. doi: 10.1007/s12555-015-2009-4
Chen, G., Cao, H., Conradt, J., Tang, H., Röhrbein, F., and Knoll, A. (2020). Event-based neuromorphic vision for autonomous driving: a paradigm shift for bio-inspired visual sensing and perception. IEEE Signal Process. Magaz. 37, 34–49. doi: 10.1109/MSP.2020.2985815
Cheng, S., Li, L., Liu, C.-Z., Wu, X., Fang, S.-N., and Yong, J.-W. (2020). Robust lmi-based h-infinite controller integrating afs and dyc of autonomous vehicles with parametric uncertainties. IEEE Trans. Syst. Man Cybernet. Syst. doi: 10.1109/TSMC.2020.2964282
Cho, J., and Huh, K. (2019). Active front steering for driver steering comfort and vehicle driving stability. Int. J. Automot. Technol. 20, 589–596. doi: 10.1007/s12239-019-0056-1
Duan, G.-R., and Yu, H.-H. (2013). LMIs in Control Systems: Analysis, Design and Applications. Boca Raton, FL: CRC Press. doi: 10.1201/b15060
Elbanhawi, M., Simic, M., and Jazar, R. (2018). Receding horizon lateral vehicle control for pure pursuit path tracking. J. Vibrat. Control 24, 619–642. doi: 10.1177/1077546316646906
Gielen, R. H., Lazar, M., and Kolmanovsky, I. V. (2012a). Lyapunov methods for time-invariant delay difference inclusions. SIAM J. Control Optimizat. 50, 110–132. doi: 10.1137/100807065
Gielen, R. H., Lazar, M., and Teel, A. R. (2012b). Input-to-state stability analysis for interconnected difference equations with delay. Math. Control Signals Syst. 24, 33–54. doi: 10.1007/s00498-012-0080-4
Hu, C., Jing, H., Wang, R., Yan, F., and Chadli, M. (2016). Robust h infinity output-feedback control for path following of autonomous ground vehicles. Mech. Syst. Signal Process. 70, 414–427. doi: 10.1016/j.ymssp.2015.09.017
Hu, Y., Chen, G., Ning, X., Dong, J., Liu, S., and Knoll, A. (2019). “Mobile robot learning from human demonstrations with nonlinear model predictive control,” in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Macau: IEEE), 5057–5062. doi: 10.1109/IROS40897.2019.8968277
Jeong, S. C., and Park, P. (2005). Constrained mpc algorithm for uncertain time-varying systems with state-delay. IEEE Trans. Automat. Control 50, 257–263. doi: 10.1109/TAC.2004.841920
Jiang, L., and Wu, Z. (2018). Sliding mode control for intelligent vehicle trajectory tracking based on reaching law. Trans. Chin. Soc. Agric. Mach. 49, 381–386. doi: 10.6041/j.issn.1000-1298.2018.03.048
Jiang, Z.-P., and Wang, Y. (2001). Input-to-state stability for discrete-time nonlinear systems. Automatica 37, 857–869. doi: 10.1016/S0005-1098(01)00028-0
Kothare, M. V., Balakrishnan, V., and Morari, M. (1996). Robust constrained model predictive control using linear matrix inequalities. Automatica 32, 1361–1379. doi: 10.1016/0005-1098(96)00063-5
Liu, C., Lee, C., Hansen, A., Hedrick, J. K., and Ding, J. (2014). “A computationally efficient predictive controller for lane keeping of semi-autonomous vehicles,” in Dynamic Systems and Control Conference (San Antonio, TX: American Society of Mechanical Engineers). doi: 10.1115/DSCC2014-6098
Liu, W., and Li, Z. (2019). Comprehensive predictive control method for automated vehicles with delays. IEEE Access 7, 81923–81933. doi: 10.1109/ACCESS.2019.2923762
Liu, Y., Wang, X., Li, L., Cheng, S., and Chen, Z. (2019). A novel lane change decision-making model of autonomous vehicle based on support vector machine. IEEE Access 7, 26543–26550. doi: 10.1109/ACCESS.2019.2900416
Mayne, D. Q., Rawlings, J. B., Rao, C. V., and Scokaert, P. O. (2000). Constrained model predictive control: stability and optimality. Automatica 36, 789–814. doi: 10.1016/S0005-1098(99)00214-9
Nahidi, A., Khajepour, A., Kasaeizadeh, A., Chen, S.-K., and Litkouhi, B. (2019). A study on actuator delay compensation using predictive control technique with experimental verification. Mechatronics 57, 140–149. doi: 10.1016/j.mechatronics.2018.11.007
Rajamani, R. (2011). Vehicle Dynamics and Control. Luxemburg: Springer Science and Business Media. doi: 10.1007/978-1-4614-1433-9_2
Ren, H., Karimi, H. R., Lu, R., and Wu, Y. (2019). Synchronization of network systems via aperiodic sampled-data control with constant delay and application to unmanned ground vehicles. IEEE Trans. Indus. Electron. 67, 4980–4990. doi: 10.1109/TIE.2019.2928241
Sakhdari, B., and Azad, N. L. (2018). Adaptive tube-based nonlinear mpc for economic autonomous cruise control of plug-in hybrid electric vehicles. IEEE Trans. Vehicular Technol. 67, 11390–11401. doi: 10.1109/TVT.2018.2872654
Shamaghdari, S., Nikravesh, S., and Haeri, M. (2015). Integrated guidance and control of elastic flight vehicle based on robust mpc. Int. J. Robust Nonlinear Control 25, 2608–2630. doi: 10.1002/rnc.3215
Sun, C., Zhang, X., Zhou, Q., and Tian, Y. (2019). A model predictive controller with switched tracking error for autonomous vehicle path tracking. IEEE Access 7, 53103–53114. doi: 10.1109/ACCESS.2019.2912094
Teel, A. R. (1998). Connections between razumikhin-type theorems and the iss nonlinear small gain theorem. IEEE Trans. Automatic Control 43, 960–964. doi: 10.1109/9.701099
Teng, L. (2018). Robustmodel predictive control of nonlinear and time-delay systems (Ph.D. thesis). Department of Mechanical and Biomedical Engineering, City University of Hong Kong, Hong Kong, China
Teng, L., Wang, Y., Cai, W., and Li, H. (2017). Fuzzy model predictive control of discrete-time systems with time-varying delay and disturbances. IEEE Trans. Fuzzy Syst. 26, 1192–1206. doi: 10.1109/TFUZZ.2017.2717798
Wang, N., Lv, S., Er, M. J., and Chen, W.-H. (2016). Fast and accurate trajectory tracking control of an autonomous surface vehicle with unmodeled dynamics and disturbances. IEEE Trans. Intell. Vehicles 1, 230–243. doi: 10.1109/TIV.2017.2657379
Wang, P., Liu, Z., Liu, Q., and Chen, H. (2019). An MPC-based manoeuvre stability controller for full drive-by-wire vehicles. Control Theory Technol. 17, 357–366. doi: 10.1007/s11768-019-9119-0
Wang, X., Taghia, J., and Katupitiya, J. (2016). Robust model predictive control for path tracking of a tracked vehicle with a steerable trailer in the presence of slip. IFAC Pap. Online 49, 469–474. doi: 10.1016/j.ifacol.2016.10.085
Xu, S., Peng, H., and Tang, Y. (2020). Preview path tracking control with delay compensation for autonomous vehicles. IEEE Trans. Intell. Transport. Syst. doi: 10.1109/TITS.2020.2978417
Yang, W., and Feng, G. (2013). “Robust model predictive control of discrete-time uncertain linear systems with persistent disturbances,” in 2013 IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems (Nanjing: IEEE), 58–63. doi: 10.1109/CYBER.2013.6705420
Yang, W., Feng, G., and Zhang, T. (2013). Robust model predictive control for discrete-time takagi-sugeno fuzzy systems with structured uncertainties and persistent disturbances. IEEE Trans. Fuzzy Syst. 22, 1213–1228. doi: 10.1109/TFUZZ.2013.2286635
Yu, J., Guo, X., Pei, X., Chen, Z., Zhu, M., and Gong, B. (2019). Robust Model Predictive Control for Path Tracking of Autonomous Vehicle. Detroit, MI: Technical report, SAE Technical Paper. doi: 10.4271/2019-01-0693
Keywords: robust model predictive control, vehicle dynamic control, matrix inequities, robust positively invariant, model uncertainties, external disturbances, time-varying delay
Citation: Liu W, Chen G and Knoll A (2021) Matrix Inequalities Based Robust Model Predictive Control for Vehicle Considering Model Uncertainties, External Disturbances, and Time-Varying Delay. Front. Neurorobot. 14:617293. doi: 10.3389/fnbot.2020.617293
Received: 14 October 2020; Accepted: 04 December 2020;
Published: 06 January 2021.
Edited by:
Yan Wu, Institute for Infocomm Research (A*STAR), SingaporeReviewed by:
Wenyu Liang, National University of Singapore, SingaporeYu Cao, Huazhong University of Science and Technology, China
Copyright © 2021 Liu, Chen and Knoll. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Guang Chen, Z3VhbmdjaGVuQHRvbmdqaS5lZHUuY24=