 Xiaoliang Ma
Xiaoliang Ma Qunjian Chen1,2,3†
Qunjian Chen1,2,3† Zexuan Zhu
Zexuan Zhu- 1College of Computer Science and Software Engineering, Shenzhen University, Shenzhen, China
- 2Guangdong Laboratory of Artificial Intelligence and Digital Economy (SZ), Shenzhen University, Shenzhen, China
- 3National Engineering Laboratory for Big Data System Computing Technology, Shenzhen University, Shenzhen, China
- 4School of Medicine, Shenzhen University, Shenzhen, China
Different from conventional single-task optimization, the recently proposed multitasking optimization (MTO) simultaneously deals with multiple optimization tasks with different types of decision variables. MTO explores the underlying similarity and complementarity among the component tasks to improve the optimization process. The well-known multifactorial evolutionary algorithm (MFEA) has been successfully introduced to solve MTO problems based on transfer learning. However, it uses a simple and random inter-task transfer learning strategy, thereby resulting in slow convergence. To deal with this issue, this paper presents a two-level transfer learning (TLTL) algorithm, in which the upper-level implements inter-task transfer learning via chromosome crossover and elite individual learning, and the lower-level introduces intra-task transfer learning based on information transfer of decision variables for an across-dimension optimization. The proposed algorithm fully uses the correlation and similarity among the component tasks to improve the efficiency and effectiveness of MTO. Experimental studies demonstrate the proposed algorithm has outstanding ability of global search and fast convergence rate.
Introduction
In recent years, the development of evolutionary computation has attracted extensive attention. Based on the Darwinian theorem of “Survival of the Fittest” (Dawkins, 2006; Ma et al., 2014a), the population-based evolutionary algorithms (EAs) have been successfully used to solve a wide range of optimization problems (Deb, 2001; Qi et al., 2014; Ma et al., 2018). Multitasking optimization (MTO) problems have emerged as a new interest in the area of evolutionary computation (Da et al., 2016; Gupta et al., 2016a; Ong and Gupta, 2016; Yuan et al., 2016). Inspired by the ability of human beings to process multiple tasks at the same time, MTO aims at dealing with different optimization tasks simultaneously within a single solution framework. MTO introduces implicit transfer learning across different optimization tasks to improve the solving of each task (Gupta and Ong, 2016; Gupta et al., 2016b). If the component tasks in an MTO problem possess some commonalities and similarities, sharing knowledge among these optimization tasks is helpful to solve the whole MTO problems (Bali et al., 2017; Yuan et al., 2017).
Transfer learning is a new machine learning method that has caught increasing attention in recent years (Pan and Yang, 2010; Tan et al., 2017). It focuses on solving the target problem by applying the existing knowledge learned from other related problems (Gupta et al., 2018). In general, the more commonalities and similarities are shared between the source problem and target problem, the more effectively the transfer learning work for them. Multifactorial evolutionary algorithm (MFEA) is the first work to introduce transfer learning into the domain of evolutionary computation to deal with MTO problem (Gupta and Ong, 2016). In MFEA, the knowledge is implicitly transferred through chromosomal crossover (Gupta and Ong, 2016). As a general framework, MFEA uses a simple inter-task transfer learning by assortative mating and vertical cultural transmission with randomness, which tends to suffer from excessive diversity thereby leading to a slow convergence speed (Hou et al., 2017).
To deal with the aforementioned issues of MFEA, this paper proposes a two-level transfer learning (TLTL) framework in MTO. The upper level performs inter-task knowledge transfer via crossover and exploits the knowledge of the elite individuals to reduce the randomness, which is expected to enhance the search efficiency. The lower level is an intra-task knowledge transfer for transmitting information from one dimension to other dimensions within the same optimization task. The two levels cooperate with each other in a mutually beneficial fashion. The experimental results on various MTO problems show that the proposed algorithm is capable of obtaining high-quality solutions compared with the state-of-the-art evolutionary MTO algorithms.
In the rest of this paper, section “Background and Related Work” introduces the background of MTO and MFEA as well as the related work of transfer learning in evolutionary computation. The proposed TLTL algorithm is described in section “Method.” Section “Experimental Methodology” presents the MTO test problems. The comparison results between the proposed algorithm and the state-of-the-art evolutionary multitasking algorithms are shown in section “Results.” Finally, section “Discussion and Conclusion” concludes this work and points out some potential future research directions.
Background and Related Work
This section introduces the basics of MTO and MFEA, and the related work of Evolutionary MTO.
Multitasking Optimization
The main motivation of MTO is to exploit the inter-task synergy to improve the problem solving. The advantage of MTO over the counterpart single-task optimization in some specific problems has been demonstrated in the literature (Xie et al., 2016; Feng et al., 2017; Ramon and Ong, 2017; Wen and Ting, 2017; Zhou et al., 2017).
Without loss of generality, we consider a scenario in which K distinct minimization tasks are solved simultaneously. The j-th task is labeled Tj, and its objective function is defined as Fj(x):Xj→R. In such setting, MTO aims at searching the space of all optimization tasks concurrently for , where each is a feasible solution in decision space Xj. To compare solution individuals in the MFEA, it is necessary to assign new fitness for each population member pi based on a set of properties as follows (Gupta and Ong, 2016).
Definition 1 (Factorial Cost)
The factorial cost of an individual is defined as αij = γδij + Fij, where Fij and δij are the objective value and the total constraint violation of individual pi on optimization task Tj, respectively. The coefficient γ is a large penalizing multiplier.
Definition 2 (Factorial Rank)
For an optimization task Tj, the population individuals are sorted in ascending order with respect to the factorial cost. The factorial rank rij of an individual pi on optimization task Tj is the index value of piin the sort list.
Definition 3 (Skill Factor)
The skill factor τi of an individual pi is the component task on which pi performs the best τi = argmin{rij}.
Definition 4 (Scalar Fitness)
The scalar fitness of an individual pi in a multitasking environment is calculated by βi = max{1/ri1,…,1/riK}.
Multifactorial Evolutionary Algorithm
This subsection briefly introduces MFEA (Gupta and Ong, 2016), which is the first evolutionary MTO algorithm inspired by the work (Cloninger et al., 1979). MFEA evaluates a population of N individuals in a unified search space. Each individual in the initial population is pre-assigned a dominant task randomly. In the process of evolution, each individual is only evaluated with respect to one task to reduce the computing resource consumption. MFEA uses typical crossover and mutation operators of classical EAs to the population. Elite individuals for each task in the current generation are selected to form the next generation.
The knowledge transfer in MFEA is implemented through assortative mating and vertical cultural transmission (Gupta and Ong, 2016). If two parent individuals assigned to different skill factor are selected for reproduction, the dominant tasks, and genetic material of offspring inherit from their parent individuals randomly. MFEA uses a simple inter-task transfer learning and has strong randomness.
Evolutionary Multitasking Optimization
Transfer learning is one active research field of machine learning, where the related knowledge in source domain is used to help the learning of the target domain. Many transfer learning techniques have been proposed to enable EAs to solve MTO problems. For example, the cross-domain MFEA, i.e., MFEA, solves multi-task optimization problems using implicit transfer learning in crossover operation. Wen and Ting (2017) proposed a utility detection of information sharing and a resource redistribution method to reduce resource waste of MFEA. Yuan et al. (2017) presented a permutation-based MFEA (P-MFEA) for multi-tasking vehicle routing problems. Unlike the original MFEA using a random-key representation, P-MFEA adopts a more effective permutation-based unified representation. Zhou et al. (2017) suggested a novel MFEA for combinatorial MTO problems. They developed two new mechanisms to improve search efficiency and decrease the computational complexity, respectively. Xie et al. (2016) enhanced the MFEA based on particle swarm optimization (PSO). Feng et al. (2017) developed a MFEA with PSO and differential evolution (DE). Bali et al. (2017) put forward a linearized domain adaptation strategy to deal with the issue of the negative knowledge transfer between uncorrelated tasks. Ramon and Ong (2017) presented a multi-task evolutionary algorithm for search-based software test data generation. Their work is the first attempt to demonstrate the feasibility of MFEA for solving real-world problems with more than two tasks. Da et al. (2016) advanced a benchmark problem set and a performance index for single-objective MTO. Yuan et al. (2016) designed a benchmark problem set for multi-objective MTO that can facilitate the development and comparison of MTO algorithms. Hou et al. (2017) proposed an evolutionary transfer reinforcement learning framework for multi-agent intelligent system, which can adapt to the dynamic environment. Tan et al. (2017) introduced an adaptive knowledge reuse framework across expensive multi-objective optimization problems. Multi-problem surrogates were proposed to reuse knowledge gained from distinct but related problem-solving experiences. Gupta et al. (2018) discussed the recent studies on global black-box optimization via knowledge transfer across different problems, including sequential transfer, multitasking, and multiform optimization. For a general survey of transfer learning, the reader is referred to Pan and Yang (2010).
Method
This section introduces the TLTLA algorithm for MTO. The upper level is an inter-task knowledge learning, which uses the inter-task commonalities and similarities to improve the efficiency of cross-task optimization. The lower level transfer learning focuses on intra-task knowledge learning, which transmits the information from one dimension to other dimensions to accelerate the convergence. The general flowchart of the proposed algorithm is shown in Figure 1.
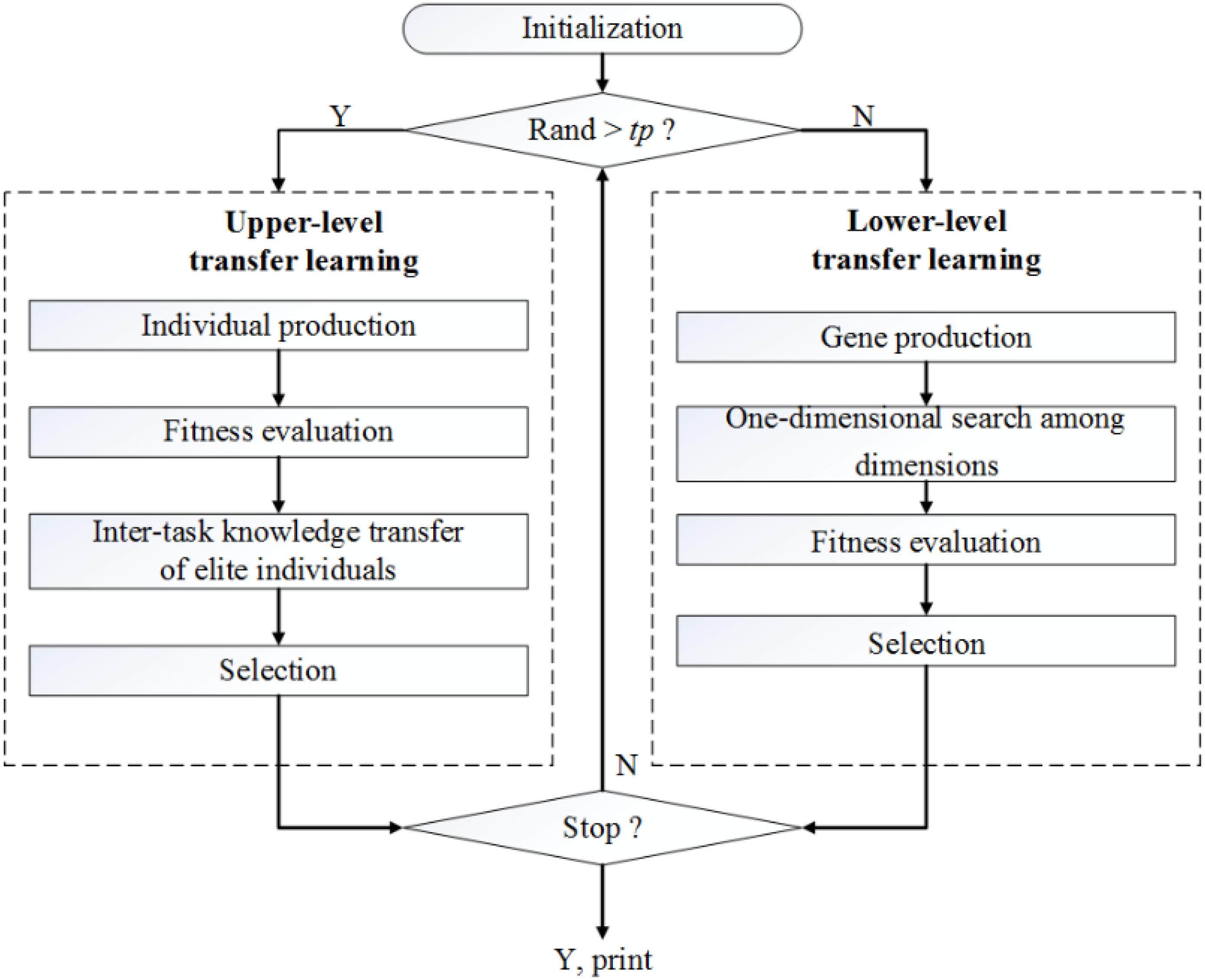
Figure 1. The general flowchart of proposed algorithm.
At the beginning of TLTLA, the individuals in the population are initialized with a unified coding scheme. Let tp indicate the inter-task transfer learning probability. If a generated random value is greater than tp, the algorithm goes through four steps to complete the inter-task transfer learning process. The parent population produces offspring population by crossover operator and mutate operator. In chromosome crossover, part of the knowledge transfer is realized with the random inheritance of culture and gene from parent to children. However, this pattern is accompanied by strong randomness. To deal with this issue, this paper suggests knowledge transfer of inter-task elite individuals. Finally, the individuals with high fitness are selected into the next generation. If the generated random value is less than tp, the algorithm performs a local search based on intra-task knowledge transfer. According to the individual fitness and the elite selection operator, the algorithm executes 1-dimensional search using information from other dimensions. Detailed description of the above two processes are provided in the following subsections.
Encoding and Decoding
To facilitate the knowledge transfer in the multitasking environment, Gupta et al. (2016b) suggested using the unified individual coding scheme. Let K denote the number of distinct component tasks in the multitasking environment, the search space dimension of the i-th task is denoted as Di. Through the unified processing, the number of decision variables of every chromosome is set to DMTO = max{Di}. Each decision variable in a chromosome is normalized in the range [0, 1] as shown in Figure 2. Conversely, in the phase of decoding, each chromosome can be decoded into a task-specific solution representation. For the i-th task Ti, we extract Di decision variables from the chromosome, and decoded these decision variables into a feasible solution for the optimization tasks Ti. In general, the extracted part is the first Di decision variables of the chromosome.
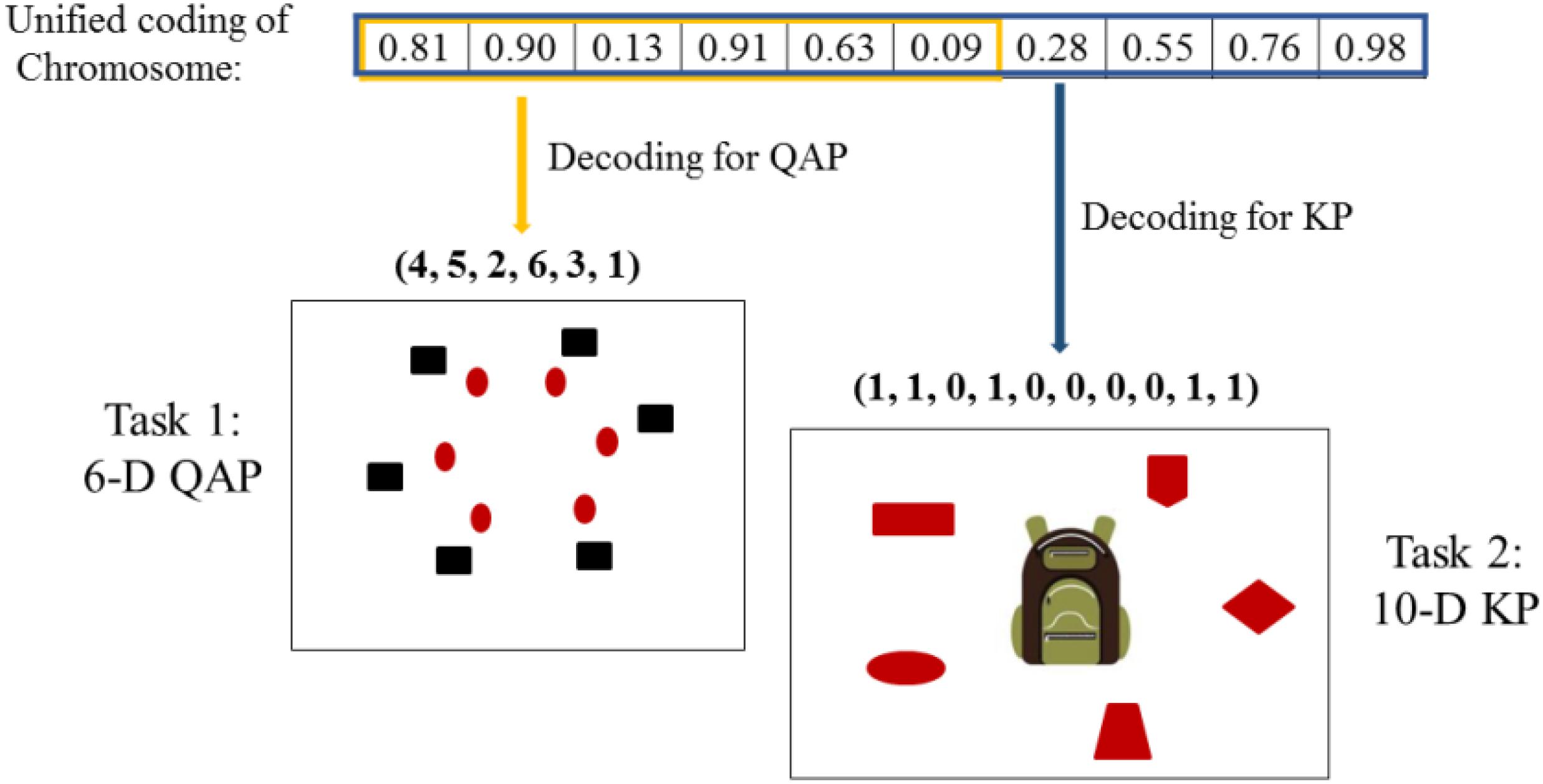
Figure 2. The unified coding and different decoding in multi-tasking optimization with quadratic assignment problem (QAP) and knapsack problem (KP).
Initialization
In the initialization, a population p0 of N individuals is generated randomly by using a unified coding scheme. Every individual is encoded in a chromosome and associated with a set of properties including factorial cost, skill factor, factorial rank, and scalar fitness. The four properties have been described in section “Background and Related Work.” Representation scheme of an individual is shown in Figure 3.
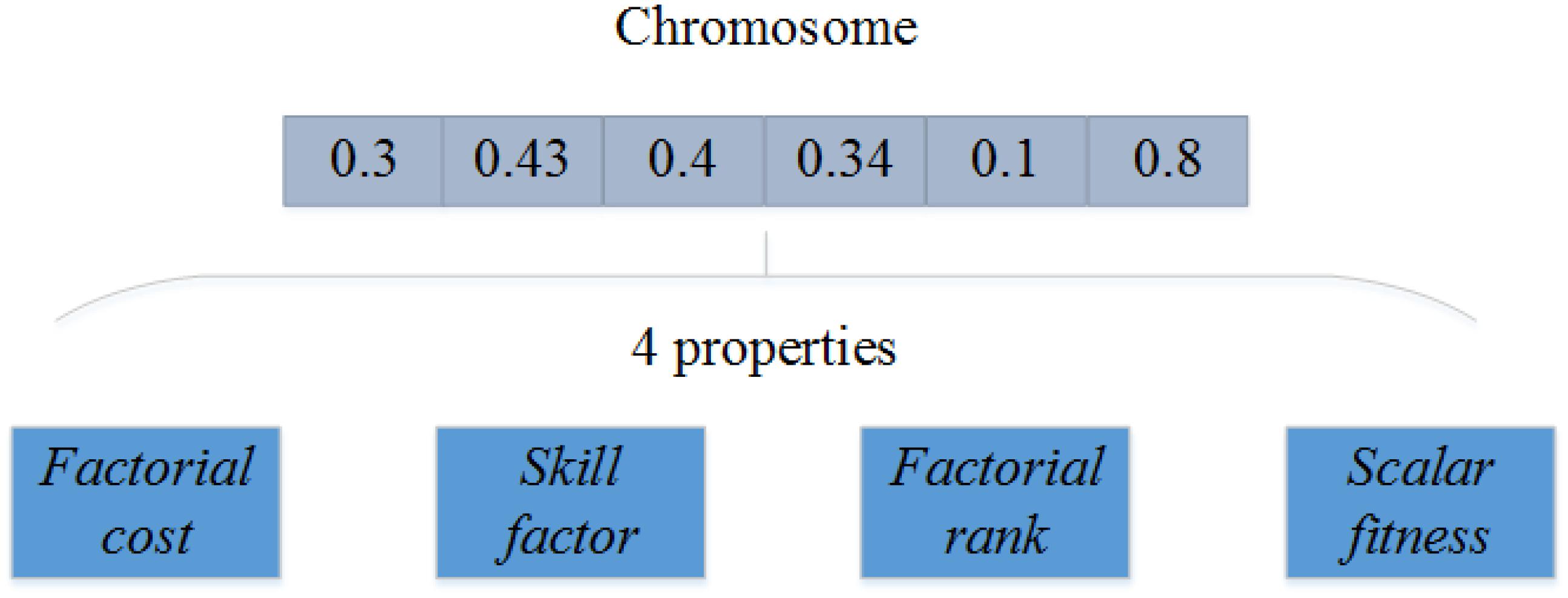
Figure 3. Representation scheme of an individual.
In such a setting, considering K optimization tasks in the initial multitasking environment, we assign the equal computation resource to each component task. In other words, the subpopulation of each component task is composed by N/K individuals in the evolutionary process.
Fitness Evaluation
In a multitasking environment, an individual may optimize one or multiple optimization tasks. Herein, a generic way is used to calculate the fitness of each individual (Gupta and Ong, 2016). Figure 4 and Table 1 illustrate the fitness assignment of the individuals in a two-task optimization problem.
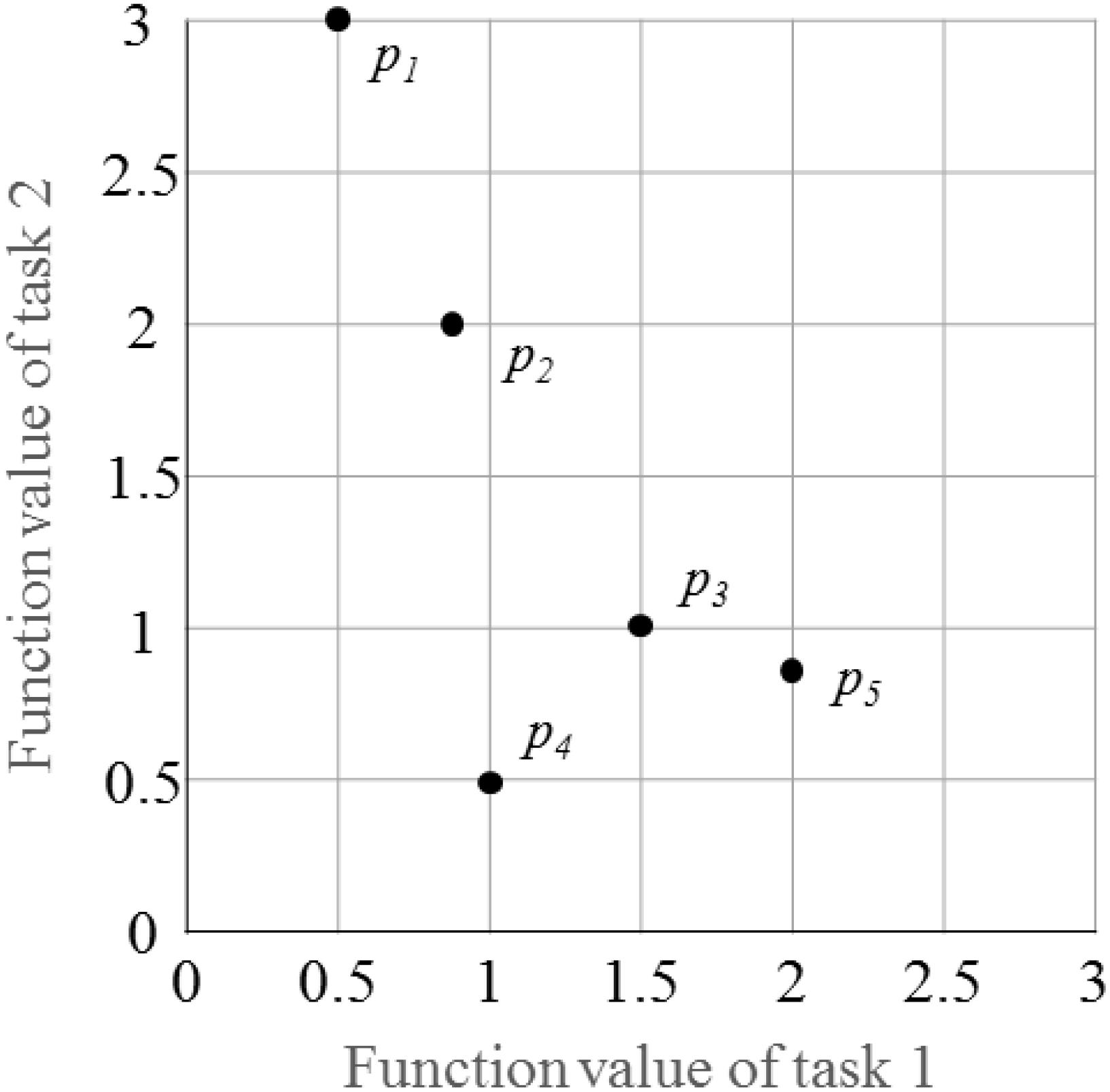
Figure 4. Five points in two-task optimization problem.
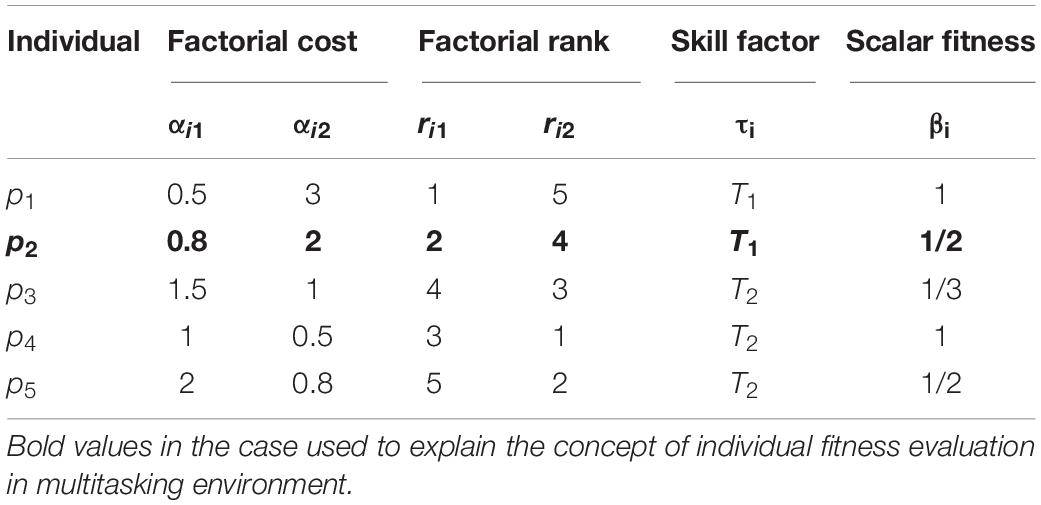
Table 1. The results of calculating individual fitness.
As shown in Figure 4, five individuals and their corresponding fitness function values on different tasks are given. According to the definitions of four properties described in the section “Background and Related Work,” the corresponding values are shown in Table 1. For example, individual p2 has factorial costs 0.8 and 2 on component tasks T1 and T2, respectively. After sorting all individuals based on their factorial costs in ascending order, the factorial ranks of individual p2 on tasks T1 and T2 are 2 and 4, respectively. Thus, the final scalar fitness and skill factor of individual p2 are 1/2 = max{1/2, 1/4} and T1, respectively.
Inter-Task Knowledge Transfer
This subsection describes the inter-task transfer learning in Algorithm 1, which enables the discovery and transfer of existing genetic material from one component task to another. Individuals in the multitasking environment may have different cultural backgrounds, i.e., different skill factors. When the cultural background of an individual is changed, the individual is transferred from one task to another (Gupta and Ong, 2016). One of the drawbacks in MFEA is the strong randomness in its inter-task knowledge transfer. To deal with this issue, an elite individual transfer is proposed in this subsection.
Algorithm 1: Inter-task transfer learning.
Require:
Pt, the current population;
rmp, the balance factor between crossover and mutation;
N, the population size;
K, the number of component tasks.
1. for i = 1 to N/2 do
2. Randomly choose parents (pa, pb) from Pt
3. if (τa == τb) or (rand < rmp)
4. (ca, cb) = crossover on (pa, pb)
5. ca and cb randomly inherits τa or τb
6. else
7. ca = mutation in (pa) and cb = mutation on (pb)
8. ca inherits (τa) and cb inherits (τb)
9. end if
10. end for
11. for i = 1 to N do
12. Evaluate ci on task τi
13. end for
14. Compute factorial rank for all individuals
15. Record elite individuals (factorial rank == 1) as Bt = {b1,…,bK} and set
16. for i = 1 to K
17. Evaluate bi on task τr, where r = rand (K) and r ! = i
18. Put the evaluated individualinto
19. end for
20. Rt = Ct ∪ Pt ∪ B
21. Compute scalar fitness for all individuals
22. Select N elite individuals from Rt to Pt+1
23. Set t = t+1
There are two ways of inter-task individual transfer in Algorithm 1. One is implicit genetic transfer through chromosomal crossover as shown in line 5 (Gupta and Ong, 2016). If two parent individuals with different cultural backgrounds undergo crossover, their offspring can inherit from one of them (Cavallisforza and Feldman, 1973; Gupta and Ong, 2016). The other is the elite individual transfer among tasks, which interchanges the skill factor of the best individuals among tasks in lines 17. If multiple optimization tasks are of commonality and similarities, a good solution to one task is also expected to have a good performance on other tasks. To reduce resource consumption, this operation is applied to the best individuals only.
Individual Production
In inter-task transfer learning, the proposed algorithm uses the simulated binary crossover (SBX) (Deb and Agrawal, 1994; Ma et al., 2016b) operator and the polynomial mutation (Ma et al., 2016a) operator to produce the offspring population.
In lines 2–9 of Algorithm 1, assortative mating and vertical cultural transmission are performed in the parent pool. Specifically, two randomly selected parent individuals undergo crossover or mutation based on the balance factor rmp. In the crossover operation, the mating of parent individuals with different skill factor may lead to the emergence of genetic transfer (Cavallisforza and Feldman, 1973; Feldman and Laland, 1996). Each child imitates the skill factor from one of the two parent individuals randomly. The random inheritance mechanism can be considered as an inter-task knowledge transfer, which shares relevant information for promoting population evolution.
Inter-Task Knowledge Transfer of Elite Individuals
Due to the strong randomness of assortative mating and vertical cultural transmission, population evolution has some limitations in the global search and convergence. In lines 15–19 of Algorithm 1, an elite individual transfer is introduced to alleviate this issue.
In each generation, the best individual of each component task (i.e., the factorial rank of this individual is 1) is recorded in line 15. Considering the commonalities and similarities among different tasks, a new skill factor for each best individual is assigned and evaluated with respect to the new task. The inter-task knowledge transfer of elite individuals is shown in line 17. If multiple optimization tasks are of strong commonalities and similarities, a good solution of one task is also expected to have good performance on the other tasks.
Evaluation and Selection
As shown in line 20, the combined population Rt consists of parent population Pt, offspring population Ct, and learned individuals . An elitist selection operator is used and the individuals with higher scalar fitness are selected into the next generation in line 22.
Intra-Task Knowledge Transfer
Besides, inter-task transfer learning, the proposed algorithm is also characterized with intra-task transfer learning as shown in Algorithm 2. The intra-task transfer learning transmits the knowledge from one dimension to other dimensions within the same task. The proposed cross-dimensional one-dimensional search complements well with SBX and is expected to prevent the algorithm from getting trapped in local optima.
Algorithm 2: Intra-task transfer learning.
Require:
Pt, the current population;
S, the number of variables in unified individual coding.
1. for i = 1 to S do
2. Randomly select an individual pr from Pt
3. Off (1, S) = differential evolution on {xi}
4. for j = 1 to S do
5. dj = (pr (1),…,pr(j-1), Off (j), pr (j+1), …, pr (S))
6. Evaluate dj on task τpr
7. if dj is better than pr
8. pr(j) = Off (j)
9. end if
10. end for
11. end for
One-Dimensional Mutation
At the beginning of Algorithm 2, an individual is randomly selected from the current population in line 2. In line 3, S offspring genes [Off(1),…,Off(S)] are generated by DE mutation operator (Qin and Suganthan, 2005; Ma et al., 2014b,c), with the parent genes coming from the i-th dimension variable xi of the population.
One-Dimensional Search Among Dimensions
As shown in lines 4–10 of Algorithm 2, S offspring are iteratively used to compare with the S variables of the selected individual pr as shown in Figure 5. Three individuals with the same dominant task are given in the search space. Firstly, we randomly select an individual p2 from the current population. Secondly, three decision variables 2, 3, and 5 are extracted in the 1st dimension of individuals p1, p2, and p3, respectively. Thirdly, three extracted decision variables undergo DE to generate three offspring genes 4, 2 and 1.5. Finally, the cross-dimensional search for individual p2 is performed to find out improved solutions. Offspring genes 1.5 and 2 replace the parent genes 3 and 4, respectively, as they obtain better fitness. On the contrary, offspring gene 4 is abandoned as it attains no improvement.
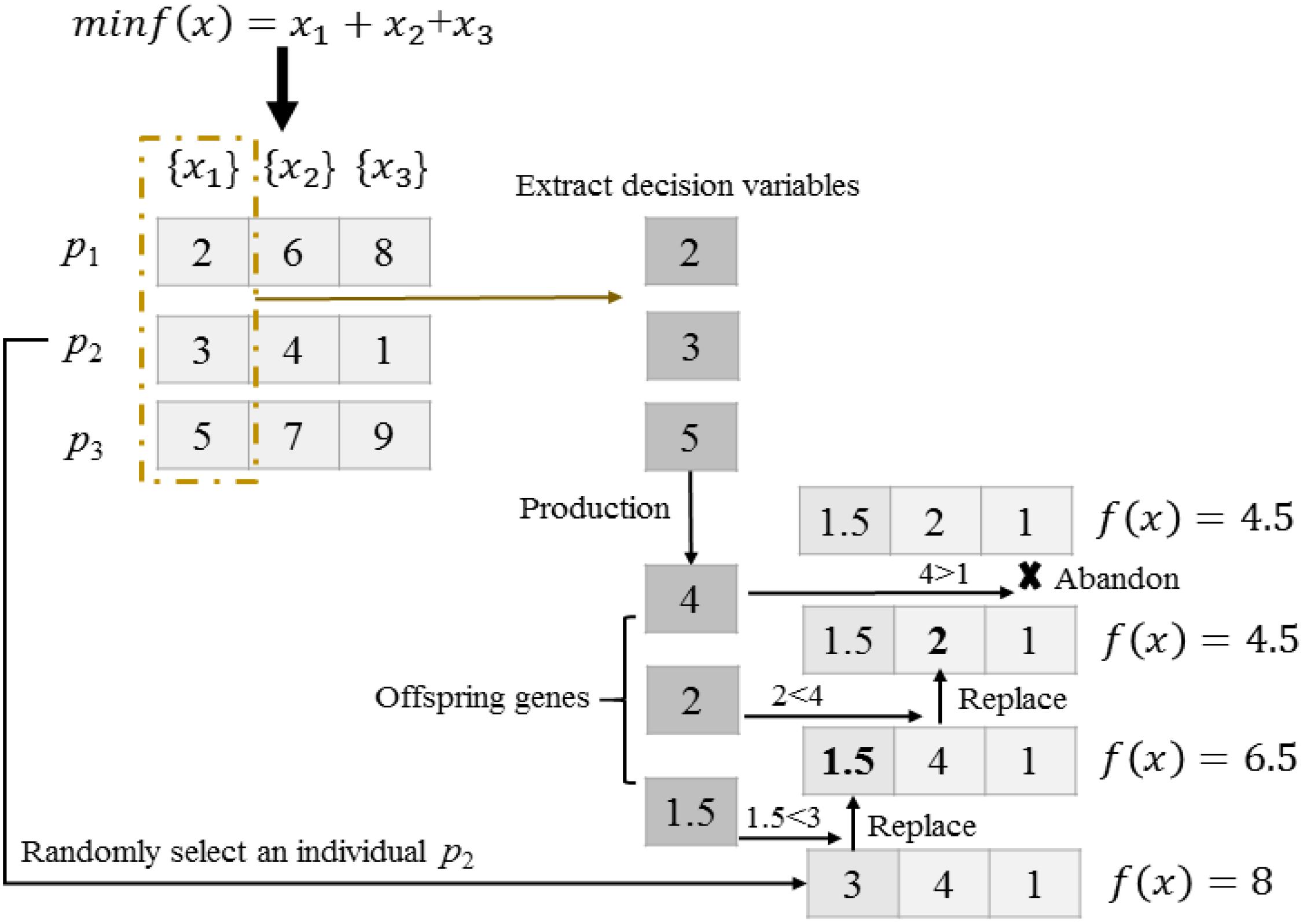
Figure 5. An example of transfer learning among different dimensions.
Evaluation and Selection
The evaluation and selection of a temporary individual dj constructed by the one-dimensional search are shown in lines 8–11. To reduce the number of function evaluations, the temporary individual dj is evaluated only on task τp_r. In line 7, if the new constructed individual dj is better than pr in terms of fitness value, pr is updated by dj in line 8.
Experimental Methodology
The proposed TLTLA is compared with the state-of-the-art evolutionary MTO algorithms, i.e., MFDE (Feng et al., 2017), MFEA (Gupta and Ong, 2016), and SOEA (Gupta and Ong, 2016). The benchmark MTO problems (Da et al., 2016) are used to test the algorithms. All test problem are bi-tasking optimization problems. To verify the effectiveness of the compared algorithms, component tasks in MTO problems possess different types of correlation in Da et al. (2016). To demonstrate the scalability of the proposed algorithm on more complex problems, we also construct nine tri-tasking optimization problems in this study.
Optimization Functions
This section introduces seven elemental single-objective continuous optimization functions (Da et al., 2016) used to construct the MTO test problems. The specific definitions of these seven functions are shown as follows. In particular, the dimensionality of the search space is denoted as D.
(1) Sphere:
(2) Rosenbrock:
(3) Ackley:
(4) Rastrigin:
(5) Schwefel:
(6) Griewank:
(7) Weierstrass:
Two Multitasking Optimization Problem Sets
The nine bi-tasking optimization problems were first proposed in Da et al. (2016), based on which nine tri-tasking optimization problems are constructed in this paper. The properties of the bi-tasking optimization problems are summarized in Table 2, which clearly shows the commonalities and similarities among component tasks.
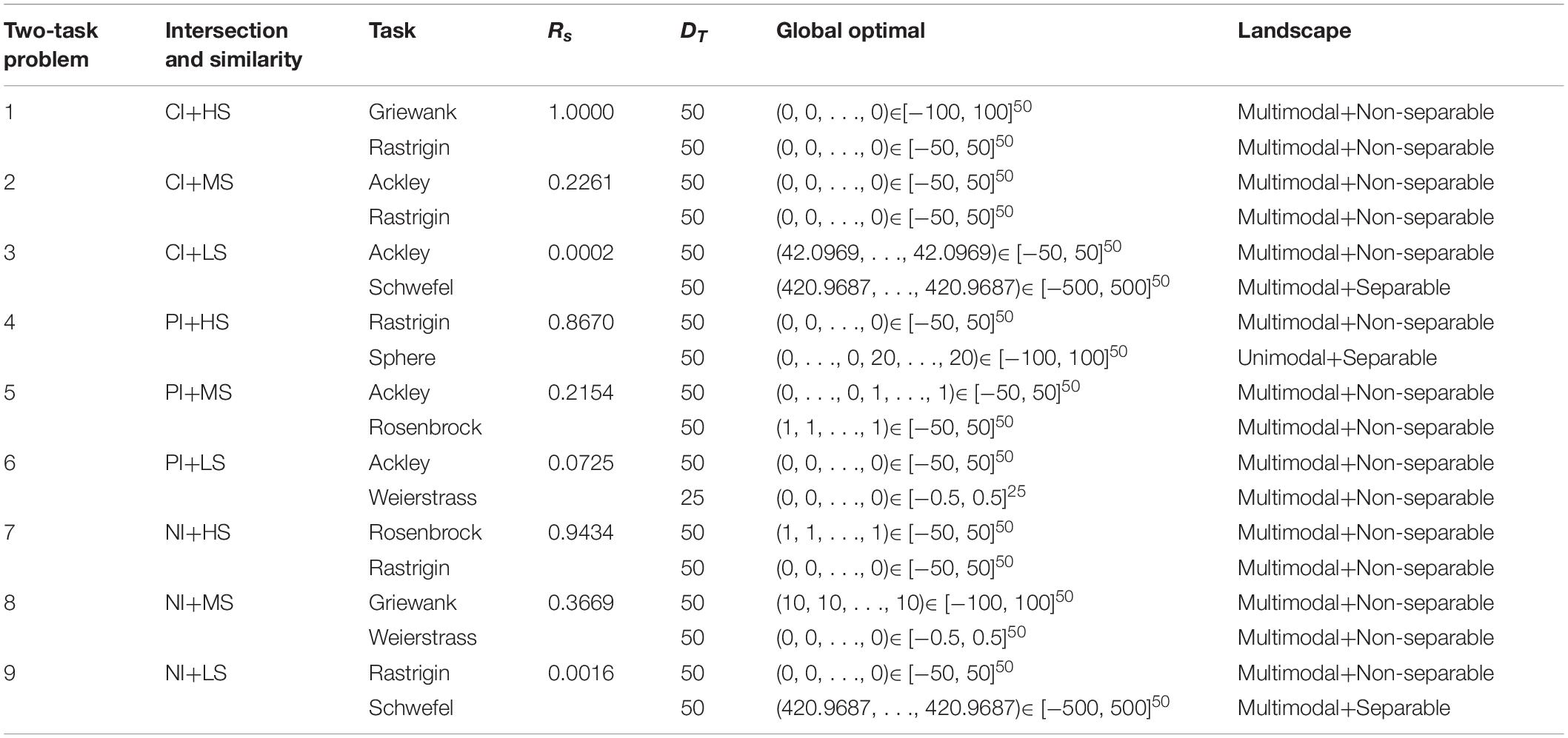
Table 2. Nine bi-tasking benchmark problems.
For the global optimal solutions of the two component tasks, complete intersection (CI) indicates that the global optima of the two optimization tasks are identical on all variables in the unified search space. No intersection (NI) means that the global optima of the two optimization tasks are different on all variables in the unified search space. Partial intersection (PI) suggests that the global optima of the two tasks are the same on a subset of variables in the unified search space.
The similarity (Rs) of a pair of optimization tasks are divided into three categories (Da et al., 2016). According to the Spearmans rank correlation similarity metric [40], Rs < 0.2 indicates low similarity (LS), 0.2 < Rs < 0.8 means medium similarity (MS), and Rs > 0.8 denotes high similarity (HS).
In addition to the above nine bi-tasking optimization problems, this paper attempts to solve tri-tasking optimization problems. Nine constructed tri-tasking optimization problems are shown in Table 3.
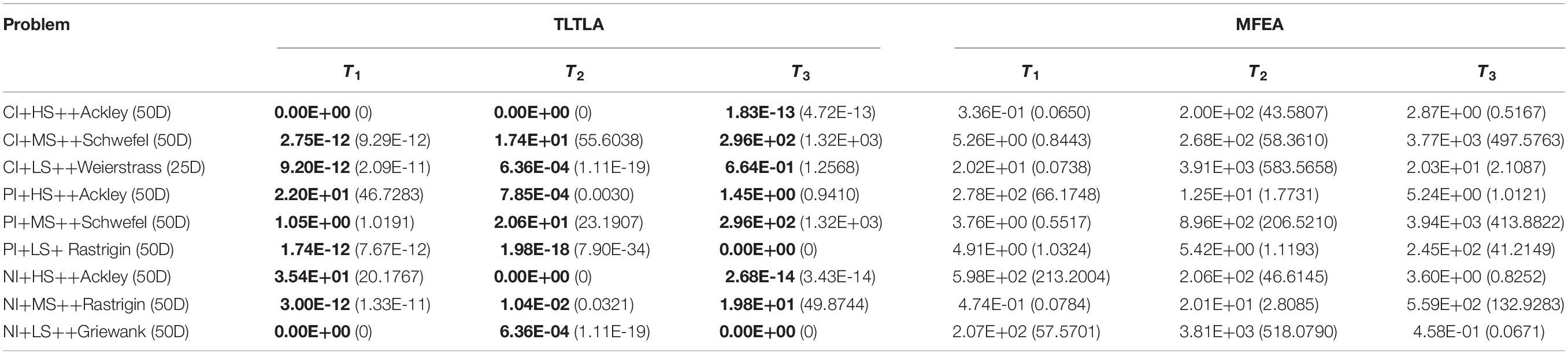
Table 3. The mean and standard deviation of function values obtained by TLTLA and MFEA on nine tri-tasking optimization problems.
Results
Experimental Results on Bi-Task Optimization Problems
On the nine bi-tasking optimization problems, the population size is set to N = 100 for TLTLA, MFDE, MFEA, and SOEA. The maximum number of function evaluations is set to be 50,000 for SOEA and 100,000 for TLTLA, MFDE, and MFEA. Since SOEA is a single-tasking algorithm, it has to be run twice on bi-tasking problems. As such, SOEA consumes the same computational budget with other algorithms. All compared algorithms are performed in 20 independent runs on each MTO problem. The balance factor between crossover and mutation is set to rmp = 0.3 in TLTLA, MFDE, and MFEA.
Table 4 presents the mean and standard deviation of function values obtained by the four compared algorithms on nine bi-tasking optimization problems. The best mean function value on each task is highlighted in bold. Compared with MFEA, MFDE and SOEA, TLTLA obtains much better performance. TLTLA obtains the best results in 17 out of 18 independent optimization tasks, except the task T1 of the PI+MS problem. To study the search efficiency of TLTLA, MFDE, MFEA, and SOEA, Figures 6–14 show the convergence trends of all compared algorithms on the representative optimization tasks. In terms of convergence rate, TLTLA obtains a better overall performance than MFDE, MFEA, and SOEA on most of optimization tasks.
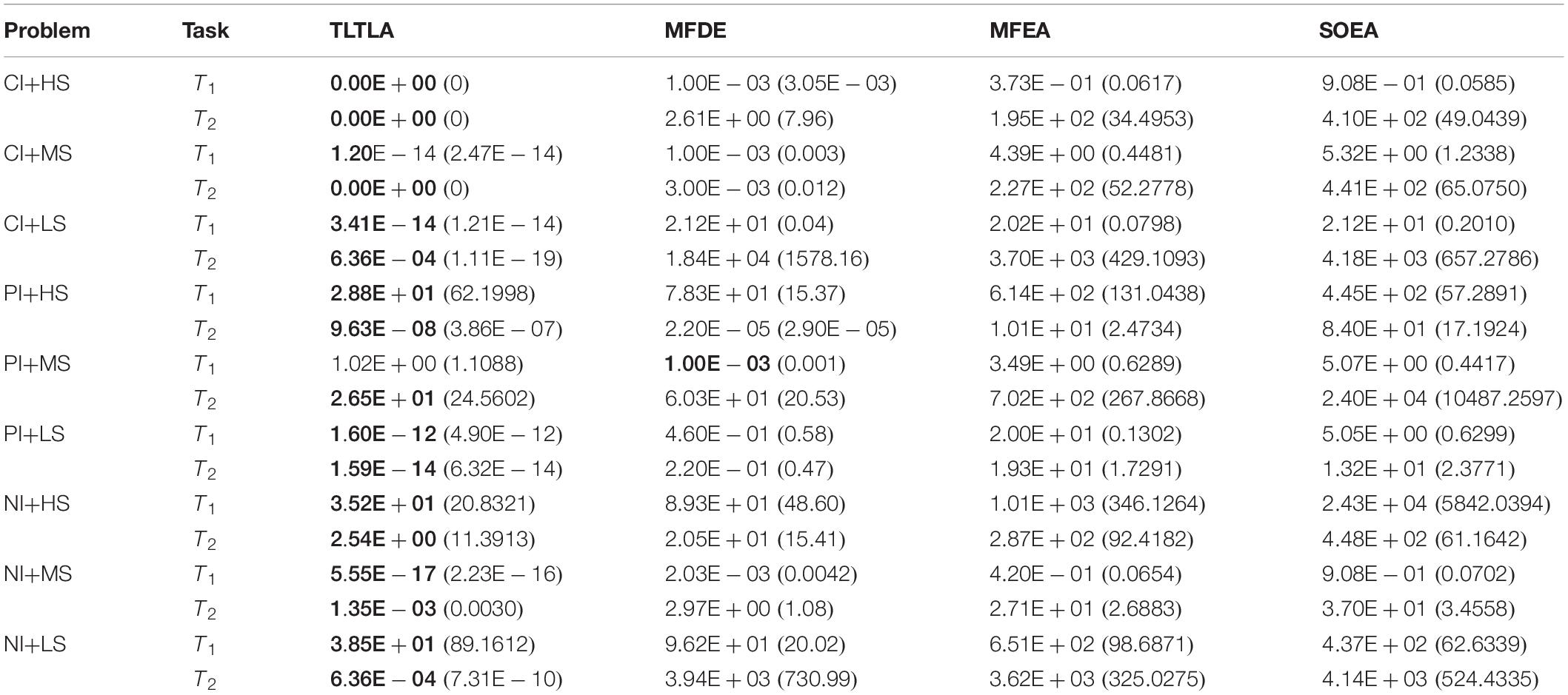
Table 4. The mean and standard deviation of function values obtained by four compared algorithms on nine bi-tasking optimization problems.
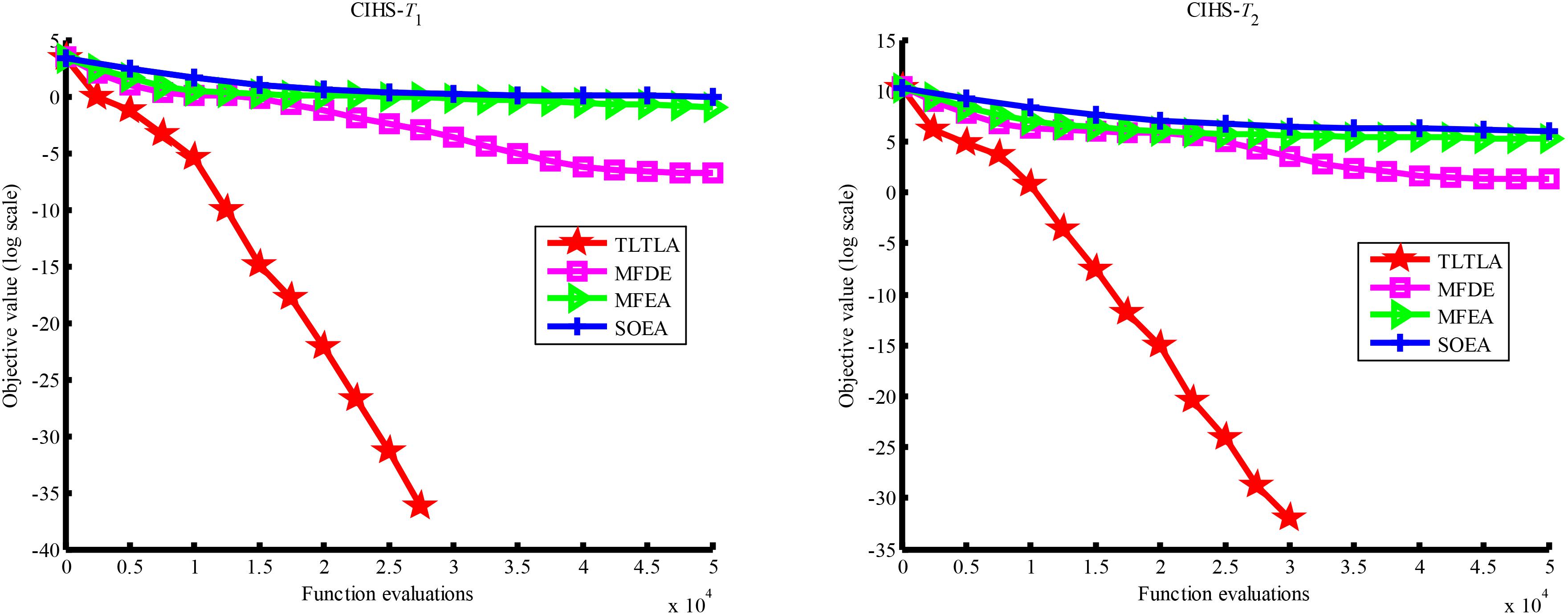
Figure 6. Convergence trends of tasks in CI+HS.
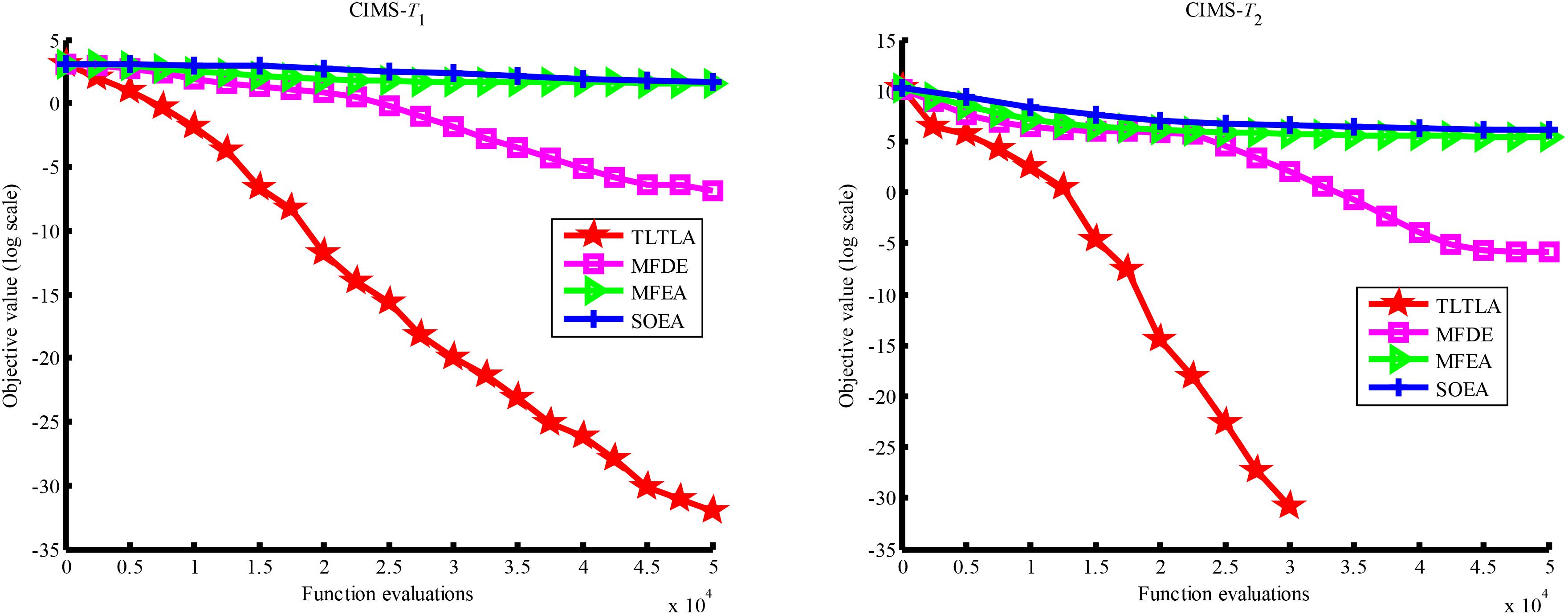
Figure 7. Convergence trends of tasks in CI+MS.
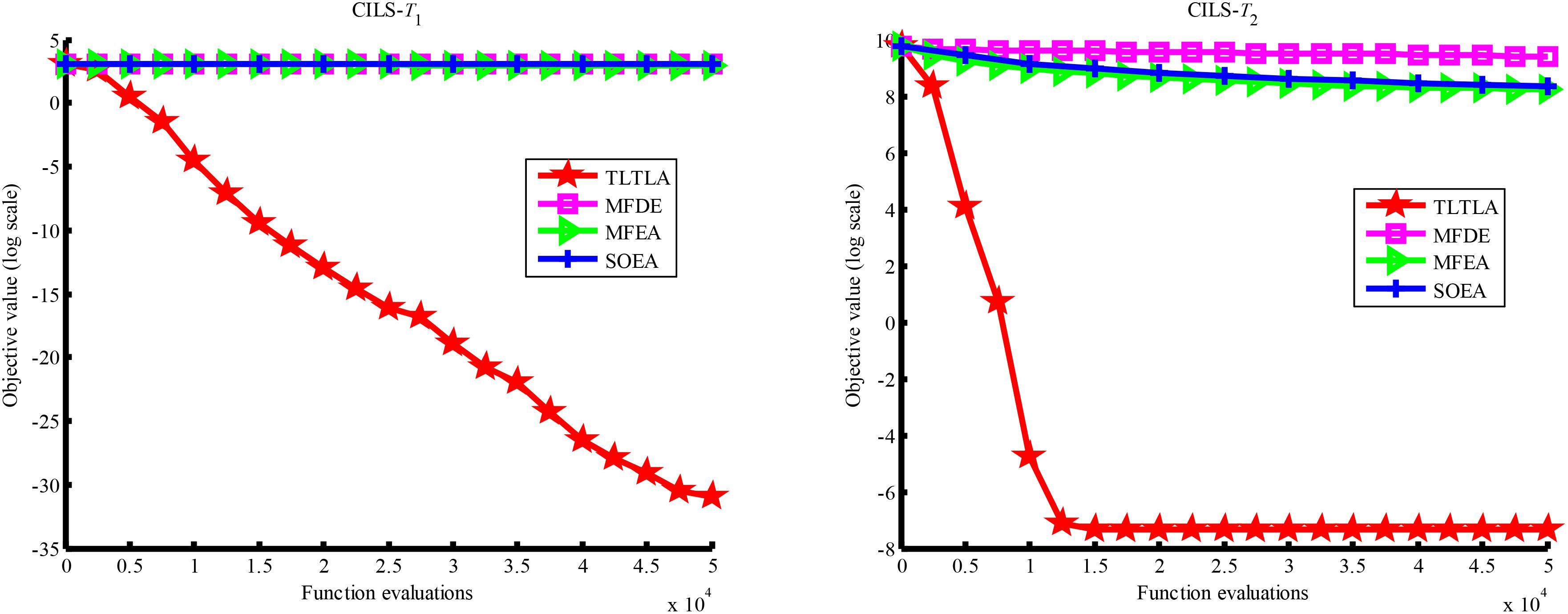
Figure 8. Convergence trends of tasks in CI+LS.
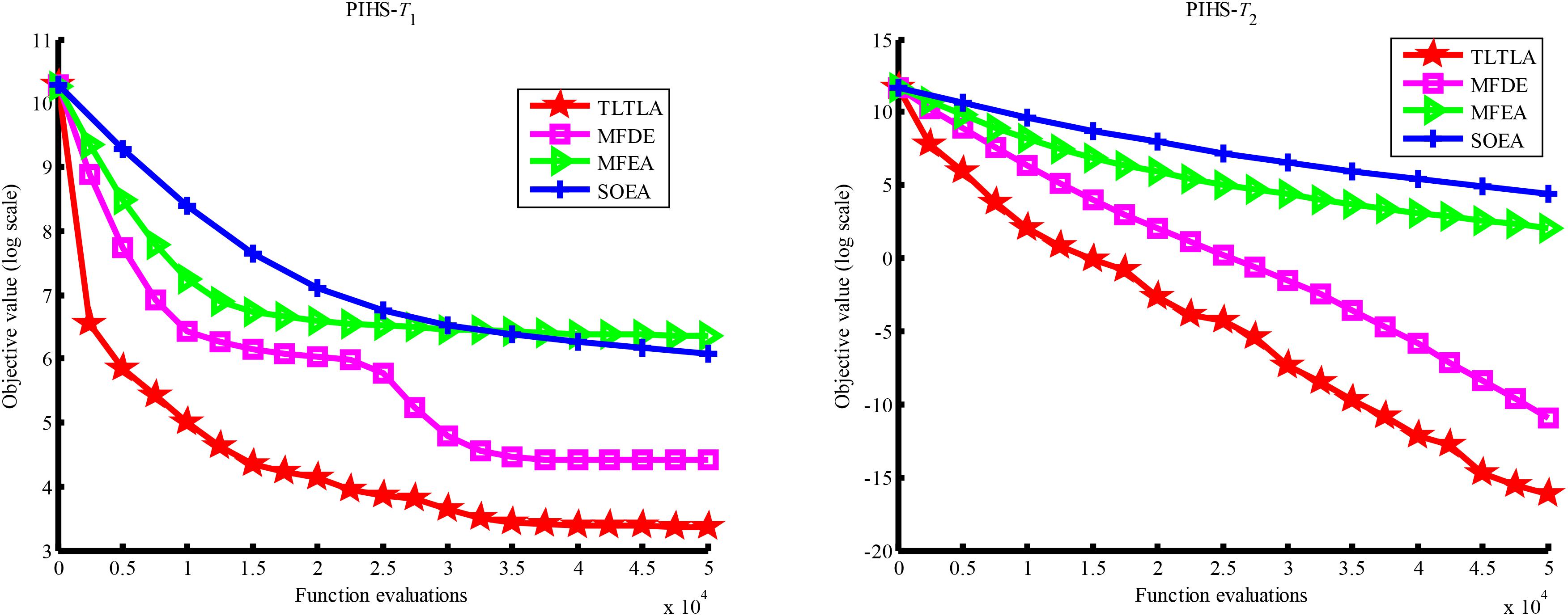
Figure 9. Convergence trends of tasks in PI+HS.
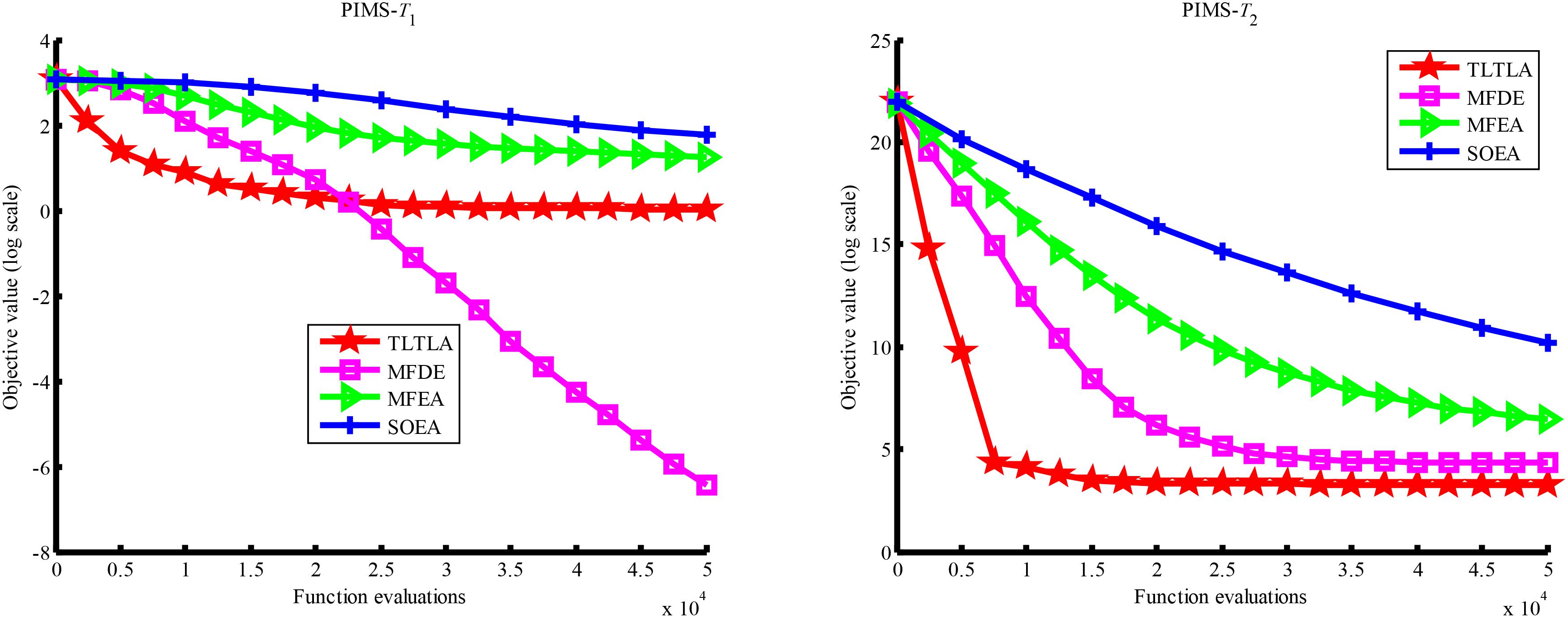
Figure 10. Convergence trends of tasks in PI+MS.
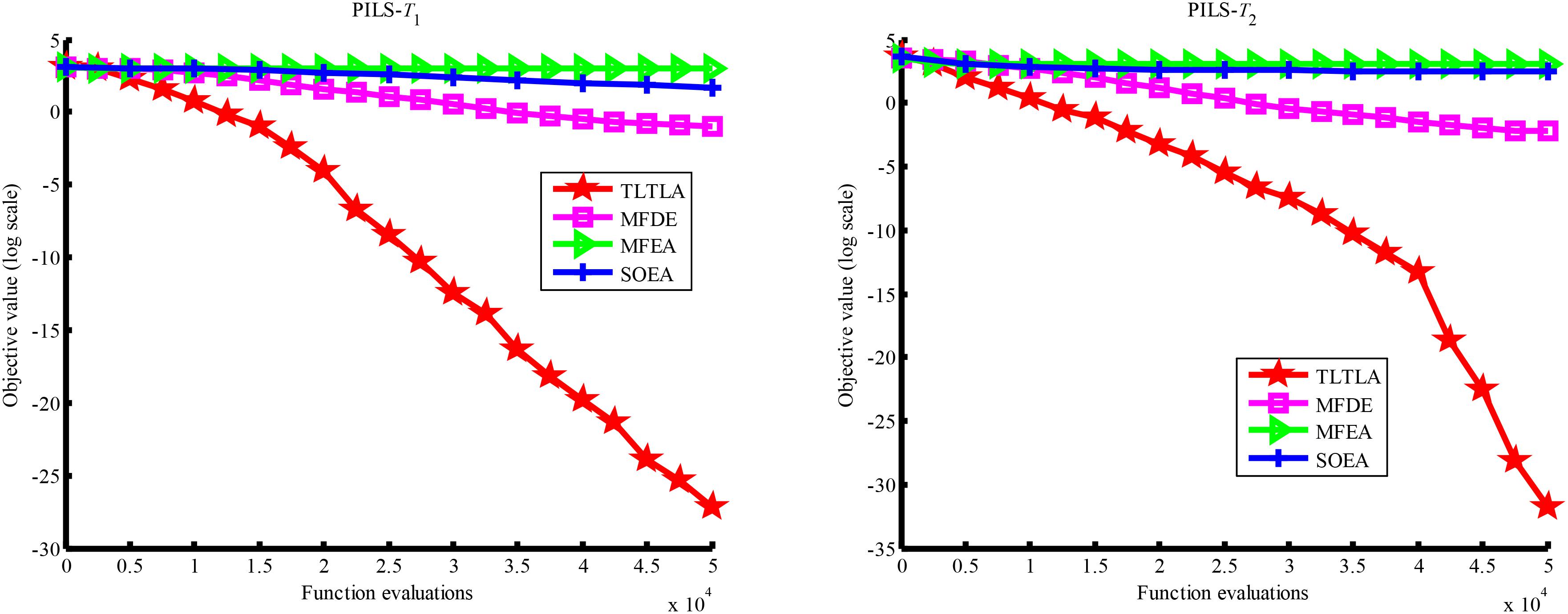
Figure 11. Convergence trends of tasks in PI+LS.
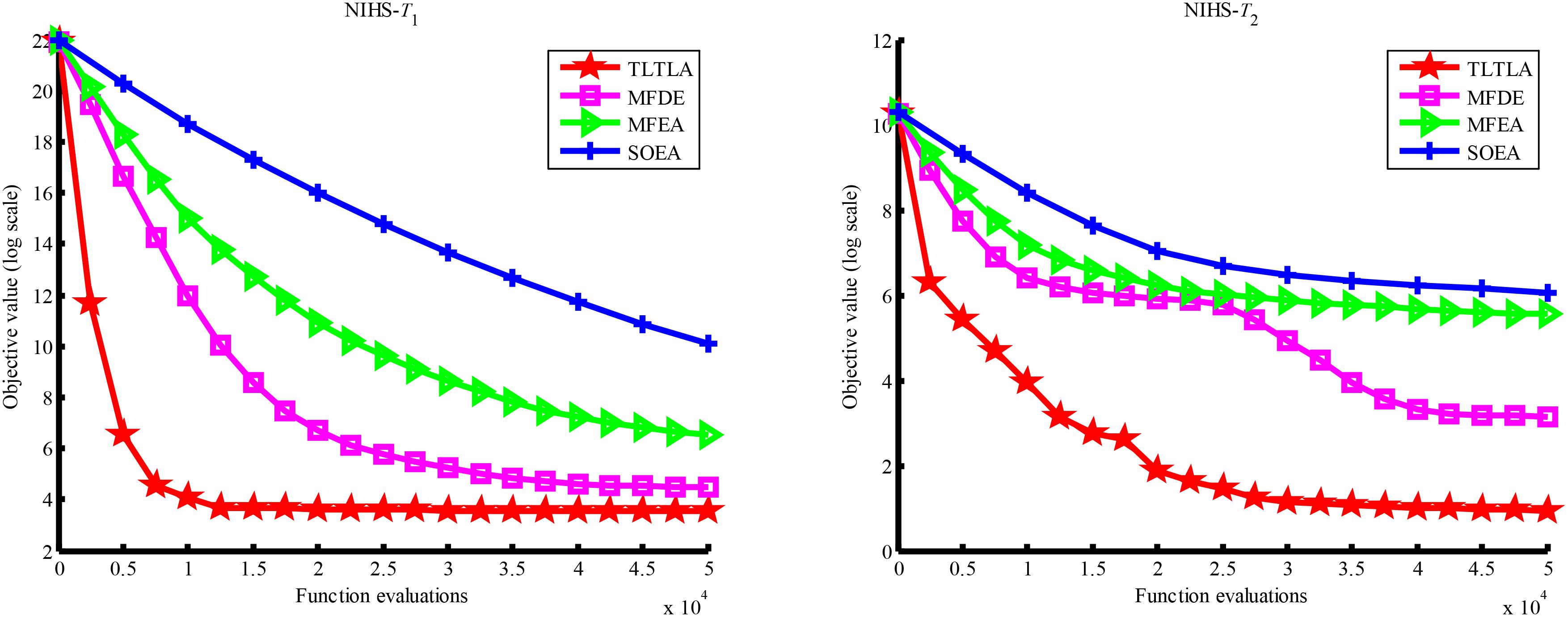
Figure 12. Convergence trends of tasks in NI+HS.
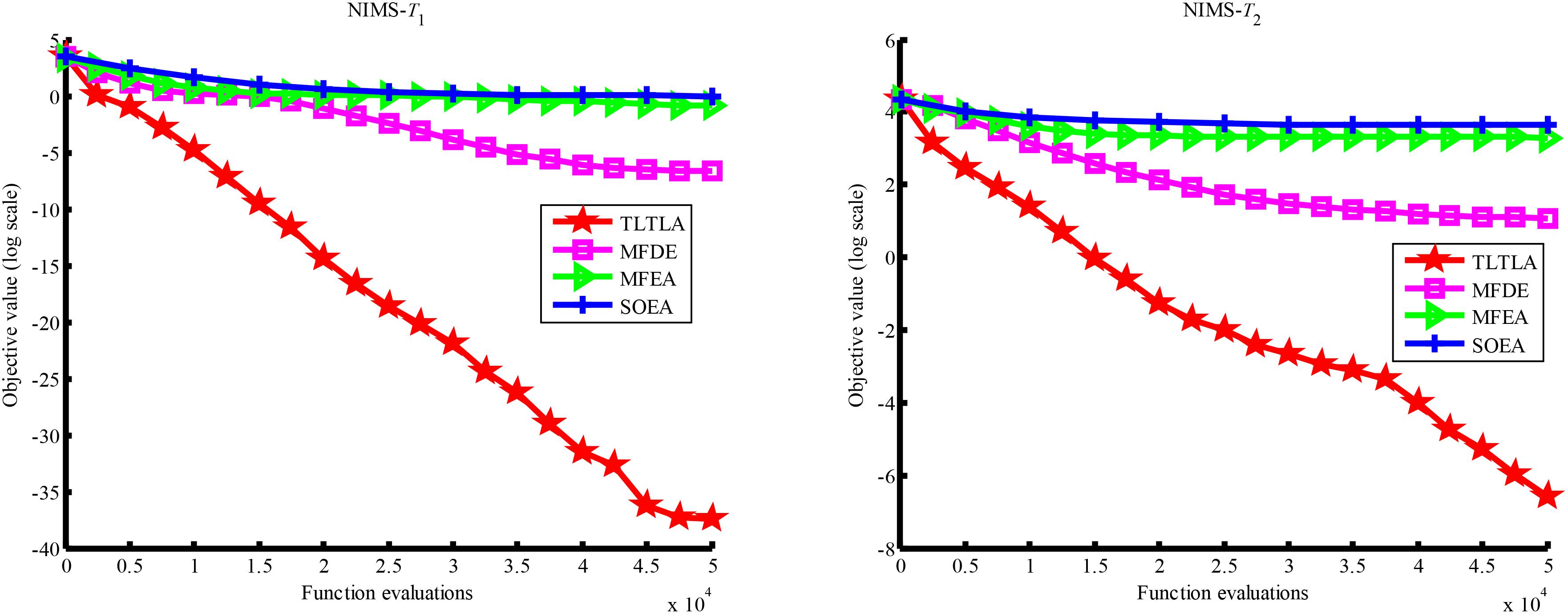
Figure 13. Convergence trends of tasks in NI+MS.
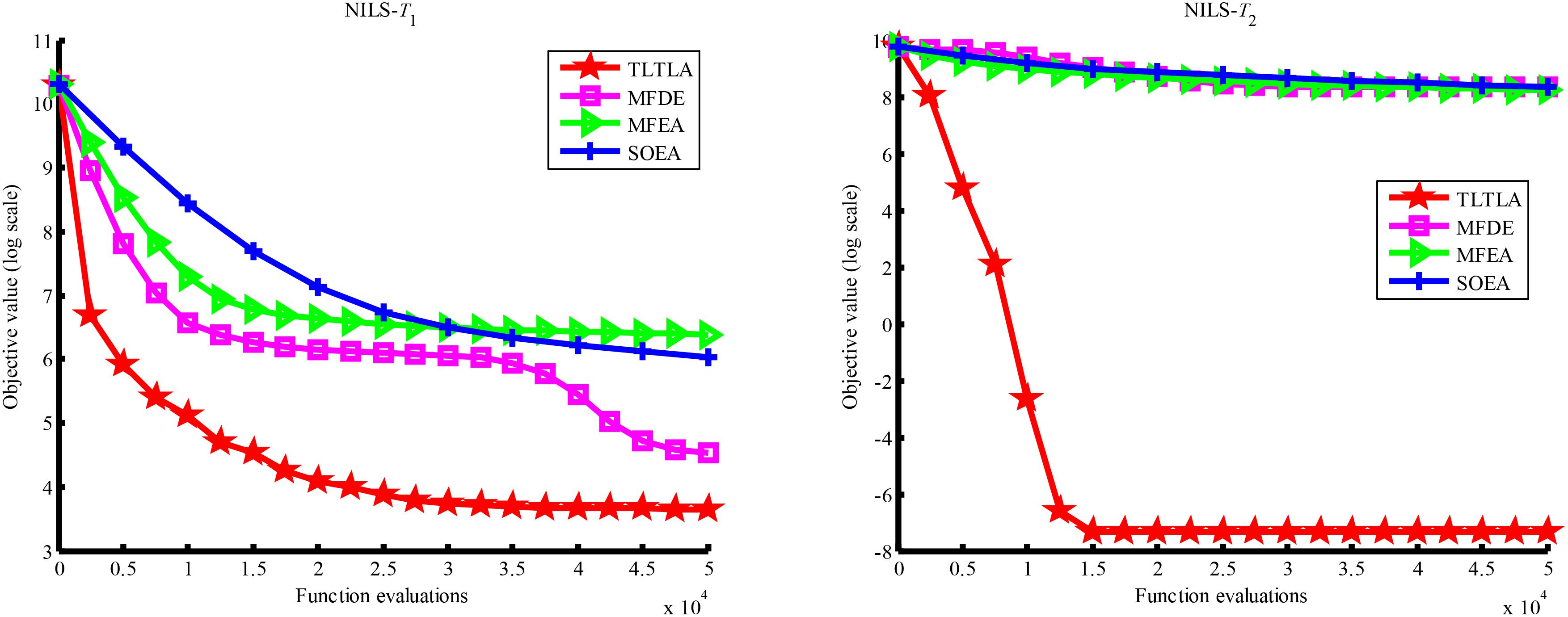
Figure 14. Convergence trends of tasks in NI+LS.
On the MTO problems with the high inter-task similarity or complementarity, such as CI+HS, CI+MS, CI+LS, PI+HS, and NI+HS, as shown in Tables 2, 4, TLTLA performs much better than MFEA, MFDE and SOEA in terms of solution quality. In particular, TLTLA obtains the corresponding global optimum 0 on tasks T1 and T2 of CI+HS and task T2 of CI+MS. Three MTO algorithms, i.e., TLTLA, MFEA, and MFDE, work better than the traditional single-task optimization algorithm SOEA thanks to the use of inter-task knowledge transfer. However, the knowledge transfer in MFEA and MFDE is of strong randomness. TLTLA handles this issue by the inter-task elite individual transfer and intra-task cross-dimensional search. The inter-task elite individual transfer is more suitable for MTO problems with CI, i.e., the global optima of two component optimization tasks are identical in the unified search space. The intra-task transfer learning can improve the population diversity and complement well with SBX.
On some MTO problems, the component tasks have different number and/or different kinds of decision variables, such as PI+LS problem. Let one of the component tasks be α-dimensional and the other be β-dimensional (supposing α < β). Therefore, all the individuals in the unified search space are encoded by β decision variables. Using cross-dimensional search, TLTLA is able to utilize the information of the extra β−α decision variables to optimize the α-dimensional component task, which is ignored by the other compared algorithms. This may be the reason TLTLA performs the best on PI+LS problem.
On separable and non-separable optimization tasks, as shown in Tables 2, 4, TLTLA performs well on all separable optimization tasks but not on the non-separable Rosenbrock function. The reason is that Rosenbrock function is fully non-separable problem making the cross-dimensional search of intra-task knowledge transfer inefficient.
Experimental Results on Tri-Tasking Optimization Problems
To study the scalability of the proposed algorithm in solving more complex tri-tasking optimization problems, we construct nine tri-tasking optimization problems based on the bi-tasking problems (Da et al., 2016). Specifically, nine tri-tasking optimization problems are constructed by adding an additional task into a bi-tasking optimization problem proposed in Da et al. (2016). All compared algorithms are performed in 20 independent runs on each tri-tasking problem. TLTLA is compared with MFEA. Both algorithms are extended to handle tri-tasking problems. The balance factor between crossover and mutation is set to rmp = 0.3 for all compared algorithms. The population size is set to N = 150 for all compared algorithms. The maximum number of function evaluations is set to 150,000 for all compared algorithms. It is important to note that the experimental settings assign an equal amount of computing resources for each component optimization task in bi-tasking and tri-task optimization problems.
Table 3 reports the mean and standard deviation of the function values obtained by TLTLA and MFEA on nine tri-tasking optimization problems. The best mean function value on each task is highlighted in bold. As can be summarized in Table 3, TLTLA performs significantly better than MFEA in dealing with the tri-tasking problems. The experimental results in Tables 3, 4 demonstrate the high scalability of the proposed algorithm. When the number of component tasks is increased, TLTLA can still obtain solutions of high quality. In particular, on task T2 of NI+HS+Ackley and task T1 of NI+LS+Griewank, the proposed algorithm gets more improvements in solving tri-tasking problem than the corresponding bi-tasking problem. The reason is that the corresponding global optimum 0 of the added Griewank task is found, which indicates that TLTLA can utilize the population diversity in the multitasking environment to escape from the local optima.
The Effectiveness Analysis of Two Proposed Knowledge Transfers
In this section, we empirically study the effectiveness of the two proposed knowledge transfer methods, including inter-task and intra-task knowledge transfers. Two variants of TLTLA, namely TLTLA-U and TLTLA-L are designed to compared with TLTLA. The former is the same as TLTLA without using the intra-task knowledge transfer, the latter is TLTLA without using the inter-task knowledge transfer. MFEA is also involved in the comparison as the baseline. Table 5 shows the mean and standard deviation of the function values obtained by each compared algorithm on nine bi-tasking optimization problems. The best mean function value on each task is highlighted in bold. The sums of rankings of the four compared algorithms are also presented.
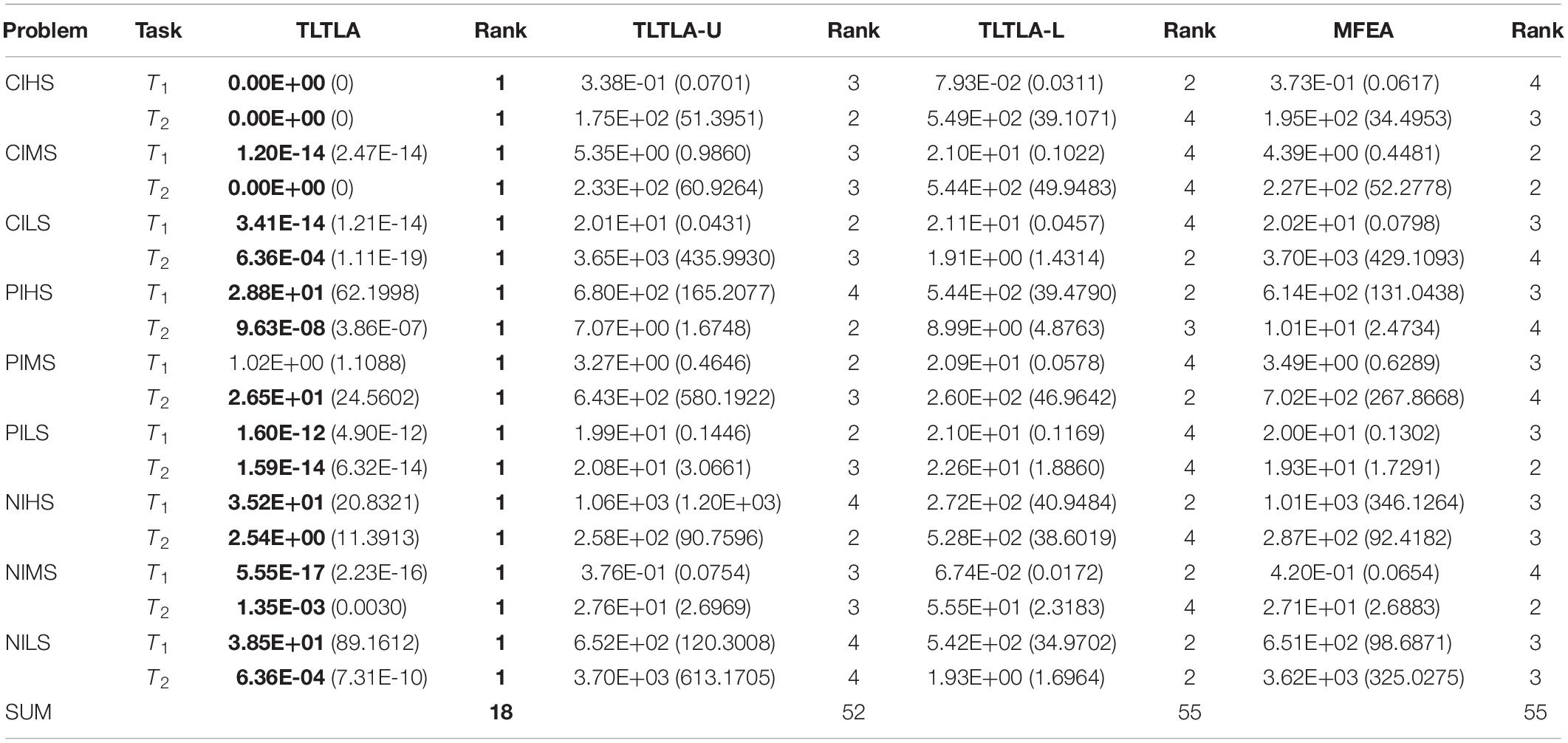
Table 5. The mean and standard deviation of function values between the algorithms TLTLA, TLTLA-U, TLTLA-L, and MFEA.
In Table 5, using only one knowledge transfer method, TLTLA-U and TLTLA-L achieve similar overall performance to MFEA. However, combining two proposed knowledge transfers, TLTLA performs much better than MFEA, TLTLA-U, and TLTLA-L on nine test problems, which indicates that the inter-task and the intra-task knowledge transfer procedures cooperate with each other in a mutually beneficial fashion. Therefore, the inter-task and intra-task transfer learning components are indispensable for the proposed algorithm.
Discussion and Conclusion
In this paper, a novel evolutionary MTO algorithm with TLTL is introduced. Particularly, the upper level transfer learning uses the commonalities and similarities among tasks to improve the efficiency and effectiveness of genetic transfer. The lower level transfer learning focuses on the intra-task knowledge learning, which transmits the beneficial information from one dimension to other dimensions. The intra-task knowledge learning can effectively use decision variables information from other dimensions to improve the exploration ability of the proposed algorithm. The experimental results on two-task and three-task optimization problems show the superior performance and high scalability of the proposed TLTLA.
Evolutionary MTO is a recent paradigm introducing the transfer learning of machine learning into the evolutionary computation (Zar, 1972; Noman and Iba, 2005; Chen et al., 2011; Zhu et al., 2011, 2015a,b,c, 2016, 2017; Gupta and Ong, 2016; Hou et al., 2017). There remain many open challenging problems. For instance, how to avoid the negative transfer? Most evolutionary MTO algorithms were proposed based on the inter-task similarity and commonality. However, on problems with few inter-task similarity and commonality, these algorithms may have worse performance than those with no transfer learning. To deal with this issue, introducing similarity measurement between two tasks could be a good choice. Moreover, how to extend the existing transfer learning based optimization algorithms to solve large-scale multitask problems in real applications remains a challenging problem.
Data Availability Statement
The code of the proposed algorithm for this study is available on request to the corresponding author.
Author Contributions
QC and XM performed the experiments, analyzed the data, and wrote the manuscript with supervision from ZZ, YS, and YY. LM contributed substantially to manuscript revision, editing for language quality, and gave suggestions on experimental studies. All authors provided the critical feedback, edited, and finalized the manuscript.
Funding
This work was supported in part by the National Natural Science Foundation of China, under grants 61976143, 61471246, 61603259, 61803629, 61575125, 61975135, and 61871272, the International Cooperation and Exchanges NSFC, under grant 61911530218, the Guangdong NSFC, under grant 2019A1515010869, the Guangdong Special Support Program of Top-notch Young Professionals, under grants 2014TQ01X273 and 2015TQ01R453, the Shenzhen Fundamental Research Program, under grant JCYJ20170302154328155, the Scientific Research Foundation of Shenzhen University for Newly-introduced Teachers, under grant 2019048, and the Zhejiang Lab’s International Talent Fund for Young Professionals. This work was supported by the National Engineering Laboratory for Big Data System Computing Technology.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
Bali, K., Gupta, A., Feng, L., Ong, Y. S., and Tan, P. S. (2017). “Linearized domain adaptation in evolutionary multitasking,” in Proceedings of the 2017 IEEE Congress on Evolutionary Computation, San Sebastian, 1295–1302.
Cavallisforza, L. L., and Feldman, M. W. (1973). Cultural versus biological inheritance: phenotypic transmission from parents to children. (A theory of the effect of parental phenotypes on children’s phenotypes). Am. J. Hum. Genet. 25, 618–627.
Chen, X., Ong, Y. S., Lim, M. H., and Tan, K. C. (2011). A multi-facet survey on memetic computation. IEEE Trans. Evol. Comput. 15, 591–607. doi: 10.1109/tevc.2011.2132725
Cloninger, C. R., Rice, J., and Reich, T. (1979). Multifactorial inheritance with cultural transmission and assortative mating. II. a general model of combined polygenic and cultural inheritance. Am. J. Hum. Genet. 31, 176–198.
Da, B., Ong, Y. S., Feng, L., Qin, A. K., Gupta, A., Zhu, Z., et al. (2016). Evolutionary Multitasking for Single-Objective Continuous Optimization: Benchmark Problems, Performance Metric, and Baseline Results. Technical Report. Singapore: Nanyang Technological University.
Deb, K., and Agrawal, R. B. (1994). Simulated binary crossover for continuous search space. Compl. Syst. 9, 115–148.
Feldman, M. W., and Laland, K. N. (1996). Gene-culture coevolutionary theory. Trends Ecol. Evol. 11, 453–467.
Feng, L., Zhou, W., Zhou, L., Jiang, S., Zhong, J., Da, B., et al. (2017). “An empirical study of multifactorial PSO and multifactorial DE,” in Proceedings of the IEEE Congress on Evolutionary Computation, San Sebastian, 921–928.
Gupta, A., Mandziuk, J., and Ong, Y. S. (2016a). Evolutionary multitasking in bi-level optimization. Compl. Intell. Syst. 1, 83–95. doi: 10.1007/s40747-016-0011-y
Gupta, A., Ong, Y. S., and Feng, L. (2016b). Multifactorial evolution: toward evolutionary multitasking. IEEE Trans. Evol. Comput. 20, 343–357. doi: 10.1109/tevc.2015.2458037
Gupta, A., and Ong, Y. S. (2016). “Genetic transfer or population diversification? Deciphering the secret ingredients of evolutionary multitask optimization,” in Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence, Athens, 1–7.
Gupta, A., Ong, Y. S., and Feng, L. (2018). Insights on transfer optimization: because experience is the best teacher. IEEE Trans. Emerg. Top. Comput. Intell. 2, 51–64. doi: 10.1109/tetci.2017.2769104
Hou, Y., Ong, Y. S., Feng, L., and Zurada, J. M. (2017). Evolutionary transfer reinforcement learning framework for multi-agent system. IEEE Trans. Evol. Comput. 21, 601–615.
Ma, X., Liu, F., Qi, Y., Gong, M., Yin, M., Li, L., et al. (2014a). MOEA/D with opposition-based learning for multiobjective optimization problem. Neurocomputing 146, 48–64. doi: 10.1016/j.neucom.2014.04.068
Ma, X., Liu, F., Qi, Y., Li, L., Jiao, L., Liu, M., et al. (2014b). MOEA/D with Baldwinian learning inspired by the regularity property of continuous multiobjective problem. Neurocomputing 145, 336–352. doi: 10.1016/j.neucom.2014.05.025
Ma, X., Qi, Y., Li, L., Liu, F., Jiao, L., and Wu, J. (2014c). MOEA/D with uniform decomposition measurements for many-objective problems. Soft Comput. 18, 2541–2564. doi: 10.1007/s00500-014-1234-8
Ma, X., Liu, F., Qi, Y., Li, L., Jiao, L., Deng, X., et al. (2016a). MOEA/D with biased weight adjustment inspired by user-preference and its application on multi-objective reservoir flood control problem. Soft Comput. 20, 4999–5023. doi: 10.1007/s00500-015-1789-z
Ma, X., Liu, F., Qi, Y., Wang, X., Li, L., Jiao, L., et al. (2016b). A multiobjective evolutionary algorithm based on decision variable analyses for multiobjective optimization problems with large-scale variables. IEEE Trans. Evol. Comput. 20, 275–298. doi: 10.1109/tevc.2015.2455812
Ma, X., Zhang, Q., Yang, J., and Zhu, Z. (2018). On Tchebycheff decomposition approaches for multi-objective evolutionary optimization. IEEE Trans. Evol. Comput 22, 226–244. doi: 10.1109/tevc.2017.2704118
Noman, N., and Iba, H. (2005). “Enhancing differential evolution performance with local search for high dimensional function optimization,” in Proceedings of the 7th Annual Conference on Genetic and Evolutionary Computation, New York, NY, 967–974.
Ong, Y. S., and Gupta, A. (2016). Evolutionary multitasking: a computer science view of cognitive multitasking. Cogn. Comput. 8, 125–142. doi: 10.1007/s12559-016-9395-7
Pan, S. J., and Yang, Q. (2010). A survey on transfer learning. IEEE Trans Knowl. Data Eng. 22, 1345–1359.
Qi, Y., Ma, X., Liu, F., Jiao, L., Sun, J., and Wu, J. (2014). MOEA/D with adaptive weight adjustment. Evol. Comput. 22, 231–264. doi: 10.1162/EVCO_a_00109
Qin, A. K., and Suganthan, P. N. (2005). “Self-adaptive differential evolution algorithm for numerical optimization,” in Proceedings of the 2015 IEEE Congress on Evolutionary Computation, Edinburgh, 1785–1791.
Ramon, S., and Ong, Y. S. (2017). “Concurrently searching branches in software tests generation through multitask evolution,” in Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence, Athens, 1–8.
Tan, W. M., Ong, Y. S., Gupta, A., and Goh, C. K. (2017). Multi-problem surrogates: transfer evolutionary multiobjective optimization of computationally expensive problems. IEEE Trans. Evol. Comput. 23:99. doi: 10.1109/TEVC.2017.2783441
Wen, Y. W., and Ting, C. K. (2017). “Parting ways and reallocating resources in evolutionary multitasking,” in Proceedings of the 2017 IEEE Congress on Evolutionary Computation, San Sebastian, 2404–2411.
Xie, T., Gong, M., Tang, Z., Lei, Y., Liu, J., and Wang, Z. (2016). “Enhancing evolutionary multifactorial optimization based on particle swarm optimization,” in Proceedings of the 2016 IEEE Congress on Evolutionary Computation, Vancouver, BC, 1658–1665.
Yuan, Y., Ong, Y. S., Feng, L., Qin, A. K., Gupta, A., Da, B., et al. (2016). Evolutionary Nultitasking for Multiobjective Continuous Optimization: Benchmark Problems, Performance Metrics and Baseline Results. Technical Report. Singapore: Nanyang Technological University.
Yuan, Y., Ong, Y. S., Gupta, A., Tan, P. S., and Xu, H. (2017). “Evolutionary multitasking in permutation-based combinatorial optimization problems: Realization with TSP, QAP, LOP, and JSP,” in Proceedings of the IEEE Region 10 Conference, Singapore, 3157–3164.
Zar, J. H. (1972). Significance testing of the Spearman rank correlation coefficient. Publ. Am. Stat. Assoc. 67, 578–580. doi: 10.1080/01621459.1972.10481251
Zhou, L., Feng, L., Zhong, J., Ong, Y. S., Zhu, Z., and Sha, E. (2017). “Evolutionary multitasking in combinatorial search spaces: a case study in capacitated vehicle routing problem,” in Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence, (Athens), 1–8.
Zhu, Z., Jia, S., He, S., Sun, Y., Ji, Z., and Shen, L. (2015a). Three-dimensional Gabor feature extraction for hyperspectral imagery classification using a memetic framework. Inf. Sci. 298, 274–287. doi: 10.1016/j.ins.2014.11.045
Zhu, Z., Wang, F. S., and Sun, Y. (2015b). Global path planning of mobile robots using a memetic algorithm. Int. J. Syst. Sci. 46, 1982–1993. doi: 10.1080/00207721.2013.843735
Zhu, Z., Xiao, J., Li, J., Wang, Q. F., and Zhang, Q. (2015c). Global path planning of wheeled robots using multi-objective memetic algorithms. Integ. Comput. Aid. Eng. 22, 387–404. doi: 10.3233/ica-150498
Zhu, Z., Ong, Y. S., and Dash, M. (2017). Wrapper-filter feature selection algorithm using a memetic framework. IEEE Trans. Syst. Man Cybernet. Part B 37, 70–76. doi: 10.1109/tsmcb.2006.883267
Zhu, Z., Xiao, J., He, S., Ji, Z., and Sun, Y. (2016). A multi-objective memetic algorithm based on locality-sensitive hashing for one-to-many-to-one dynamic pickup-and-delivery problem. Inform. Sci. 329, 73–89. doi: 10.1016/j.ins.2015.09.006
Keywords: evolutionary multitasking, multifactorial optimization, transfer learning, memetic algorithm, knowledge transfer
Citation: Ma X, Chen Q, Yu Y, Sun Y, Ma L and Zhu Z (2020) A Two-Level Transfer Learning Algorithm for Evolutionary Multitasking. Front. Neurosci. 13:1408. doi: 10.3389/fnins.2019.01408
Received: 25 August 2019; Accepted: 12 December 2019;
Published: 14 January 2020.
Edited by:
Huajin Tang, Zhejiang University, ChinaReviewed by:
Jinghui Zhong, South China University of Technology, ChinaZhou Wu, Chongqing University, China
Copyright © 2020 Ma, Chen, Yu, Sun, Ma and Zhu. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Zexuan Zhu, emh1enhAc3p1LmVkdS5jbg==
†These authors have contributed equally to this work