 Yaqing Wang1
Yaqing Wang1 Huajiang Ruan
Huajiang Ruan Zhaoxi Fang
Zhaoxi Fang- 1Department of Transfusion Medicine, The Affiliated Hospital of Shaoxing University (Shaoxing Municipal Hospital), Shaoxing, China
- 2Department of Computer Science and Engineering, Shaoxing University, Shaoxing, China
- 3Institute of Artificial Intelligence, Shaoxing University, Shaoxing, China
Blood collection is one of the key steps in blood testing. The use of intelligent blood collection robots to achieve automated blood collection can effectively reduce the workload of medical staff, improve the efficiency and accuracy of blood collection, and improve the patient experience, and has received extensive attention from academic and industrial circles in recent years. This paper aims to provide a comprehensive introduction to the key technologies, latest research progress, current clinical application status, and future development opportunities and challenges of intelligent blood collection robots. The paper introduces the key technologies that can achieve autonomous blood collection, including blood vessel recognition and positioning technology, mechanical arm design, and puncture control technology. Among them, blood vessel recognition and positioning is one of the key supporting technologies for intelligent blood collection, which can be realized by using technologies such as machine vision, near-infrared imaging, and ultrasound imaging. In addition, the paper also introduces some existing commercial intelligent blood collection robots and their clinical application cases in hospitals. Finally, we analyze the future application prospects and challenges of intelligent blood collection robots.
1 Introduction
Blood testing, as a core component of medical laboratory diagnosis, plays a crucial role in disease prevention, diagnosis, treatment monitoring, and health assessment. Blood contains various cells and chemical components. Many diseases, such as infections, anemia, coagulation disorders, diabetes, kidney diseases, and liver diseases, can be identified by abnormal specific indicators in blood tests (Beili et al., 2021; Organization, 2010).
Blood collection is the primary step in blood testing, and its accuracy and reliability have a decisive influence on the subsequent test results. At present, the blood test analysis has been fully automated, but the blood sample collection is still completed manually. Manual blood collection has several problems, including slow blood collection, high failure rate, risk of infection, and long training time for blood collection skills. According to (Cheng, 2015), the failure rate of venous blood collection in a hospital medical examination center is 3%. In the process of blood collection, injuries often occur due to nurses’ non-compliance with protocols or misuse. H. Li et al. found that only 61.01% of nurses insisted on wearing gloves during blood collection, and 20.78% of needle-stick injuries occurred due to blood collection (Li et al., 2017). A survey in (Dulon et al., 2020) also showed that blood collection-related needlestick injuries accounted for more than 20%, which is one of the most prone to needlestick injuries in medical behavior.
Qualified blood drawing skills require long-term training and practice accumulation, which is a larger investment for medical institutions. Therefore, developing intelligent blood-drawing robots based on the latest generation of information and control technology to replace manual blood drawing is the future trend. Intelligent blood drawing robots have many advantages, including improving blood drawing efficiency and accuracy, reducing the waiting time for patients, reducing the risk of infection, improving the patient experience, reducing the workload of medical staff, and promoting the construction of medical informatization (Dong, 2019; Zheng, 2022).
The development of smart blood drawing robots involves multiple technologies, including machine vision technology, image fusion navigation technology, force feedback control technology, biometric identification technology, and multi-degree-of-freedom automatic puncture technology, which has a high degree of complexity (Liu, 2020; Wu, 2022; Xue Yang, 2020; Chen Z. et al., 2020; Liu, 2023). This paper aims to comprehensively sort out and summarize the latest research progress in the field of intelligent blood collection robots. This paper first describes the basic components of intelligent blood collection robots, and the different types of robots according to the site of blood collection, such as fingertip blood collection, vein blood collection, and blood collection from other body parts. Next, we analyze the key technologies and methods involved in intelligent blood collection robots, including machine vision technology, biometrics technology, infrared imaging technology, ultrasound imaging technology, and other crucial technologies. In Section 4, we investigate the current status of research and development and clinical application of existing blood collection robots and analyze the challenges and development opportunities that need to be addressed in the future in Section 5.
2 Types of intelligent blood collection robots
Figure 1 shows the structure of a typical blood collection robot. Among them, the robotic arm is responsible for performing specific blood collection operations and is one of the core parts of the robot. Sensors are used to obtain relevant information about the patient’s body, such as the position and depth of the blood vessels. Near-infrared (NIR) imaging cameras can penetrate the skin to accurately identify and restore the location of veins hidden under the skin, which is crucial for successful blood collection. Force sensors are used to monitor the force of needle insertion to avoid unnecessary injury to the patient. The control system acts as the brain of the blood collection robot, processing the data collected by the sensors, making decisions, and controlling the movement of the robotic arm. This often involves complex algorithms, including but not limited to deep learning and image processing technologies, to ensure accuracy and safety.
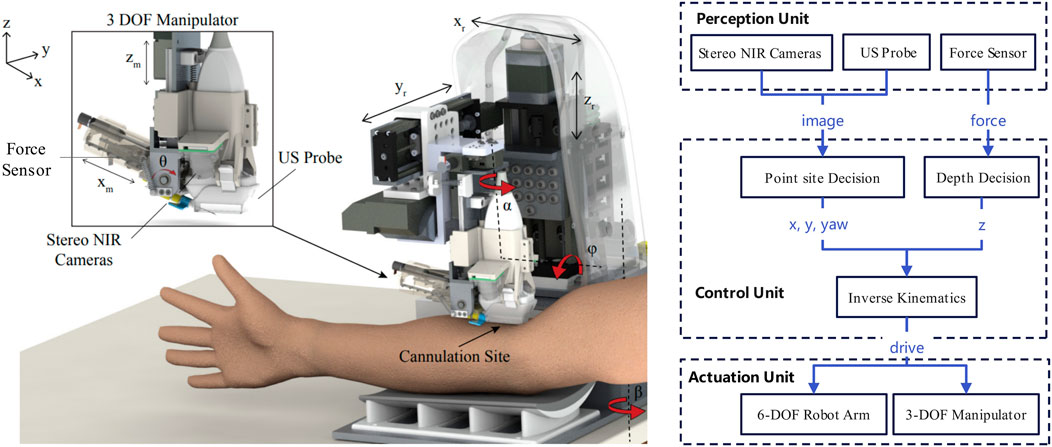
Figure 1. Structure of a US and NIR-Based robotic system for venous blood collection (Chen et al., 2015).
Depending on where the blood is collected, intelligent blood collection robots can be categorized as fingertip, upper extremity vein, and other sites. Below we will detail the characteristics of intelligent robots that collect blood at different sites and related research.
2.1 Fingertip blood collection robot
Fingertip blood collection robots are emerging medical devices that aim to automate the blood collection process and improve the efficiency and accuracy of blood testing, especially for diabetic patients who need to monitor their blood glucose on a regular basis. Fingertip blood collection robots are usually composed of multiple modules, including blood collection actuation module, information acquisition module and robotic arm system (Li et al., 2021c). The design of a fingertip blood collection robot relies on advanced vision systems, including near-infrared imaging and binocular vision technologies. These technologies enable the robot to effectively recognize finger veins and select the optimal blood collection point (Li et al., 2021b). By using a combination of 3D reconstruction and contour extraction, the robot is able to quickly acquire information about the location of the fingertip blood sample collection and perform precise puncture operations using laser guidance. This design gives the robot a significant advantage in terms of fast response and high-precision localization.
2.2 Upper extremity venous blood collection robot
Upper extremity venous blood collection is one of the most common operations in clinical diagnosis and treatment. As traditional manual blood collection relies on the experience and skills of medical personnel, the success rate of puncture for patients with obscure veins (e.g., infants, the elderly, and obese patients) is low, resulting in patient pain and waste of medical resources. Currently the main research hotspot is how to reduce the damage to blood vessels and improve the success rate of blood collection through the optimisation of robotic arms, needles, sensors and algorithms (Kobayashi et al., 2013; Yang et al., 2024b; Balter et al., 2016b; Yang et al., 2018).
2.3 Blood collection from other parts
In addition to fingertip and upper extremity vein blood collection, blood can also be collected from other parts of the body depending on the patient’s physical condition or disease treatment needs. For example, for newborns and infants, the heel of the foot is a common site for blood collection because of the thicker skin tissue in this area, which prevents damage to the nerves and blood vessels of the plantar foot. For special patients who are unable to find a suitable puncture vein in the limb, a superficial neck vein may be chosen for blood collection. In some special cases, such as severe burn patients, extremely obese patients, etc., the femoral vein may be selected for blood collection. In addition, arteries at the wrist are commonly used for arterial blood collection due to their relative superficiality and ease of collection (Ma et al., 2021; Brattain et al., 2021).
3 Key technologies for intelligent blood collection robots
Intelligent blood collection robots involve a number of key technologies, including advanced image processing and machine vision technologies, high-precision robotic arm design and control technologies, powerful data processing and decision-making systems, and comprehensive safety measures, which work together to ensure that the robot can efficiently, accurately and safely complete the venous blood collection task. Table 1 lists representative papers in the field of intelligent blood collection robotics. It gives the blood collection site, blood vessel recognition technique, target user and performance results of the robot studied in each paper.
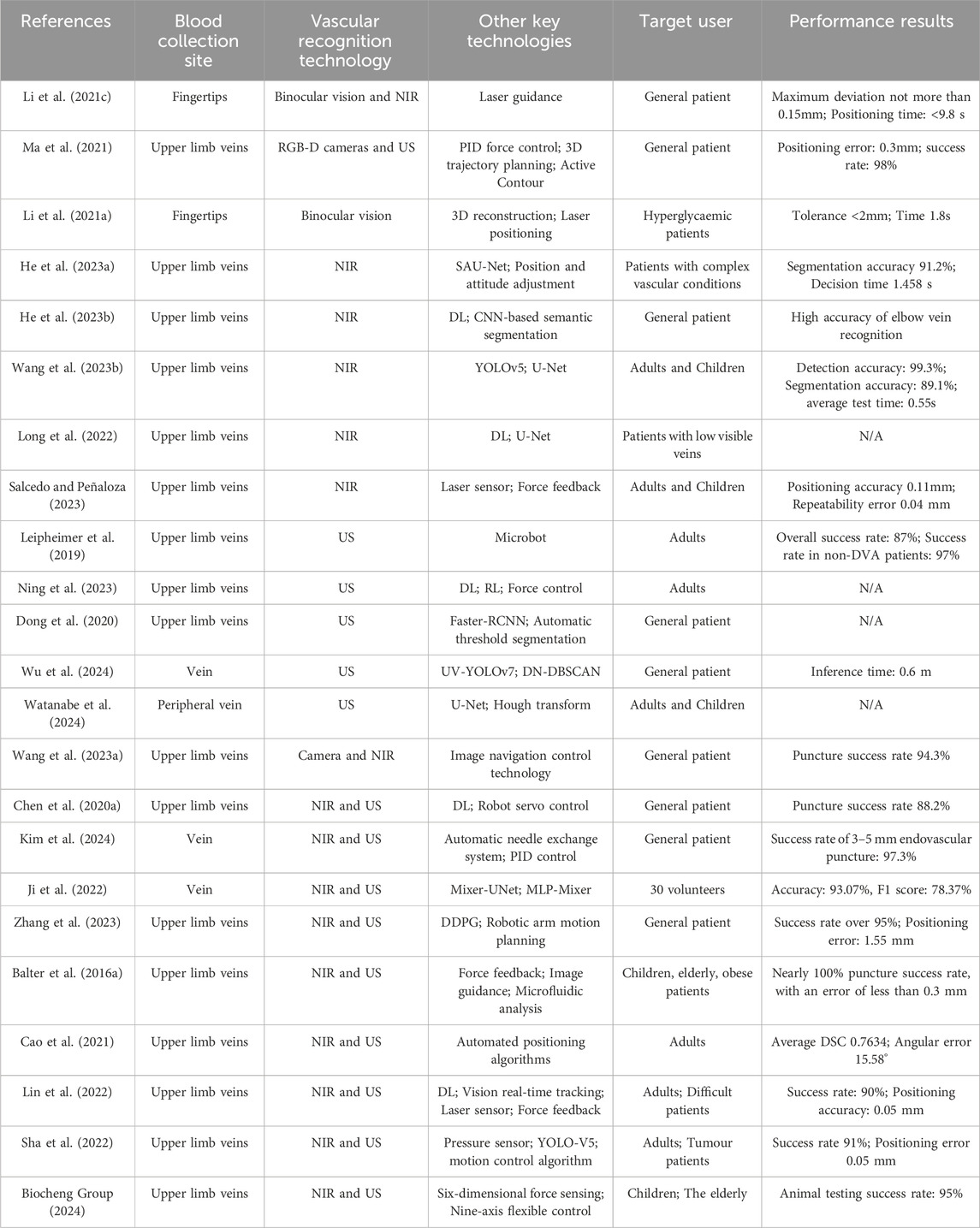
Table 1. Blood collection robots in the literature.
3.1 Vessel identification and localization
3.1.1 Camera-based vessel identification and localization
Camera-based machine vision technology is a computer technology that simulates the human visual system to recognize and understand objects through image acquisition, processing, and analysis. In the intelligent blood collection robot, this technology is used to achieve accurate positioning and identification of veins. Through a high-resolution camera combined with advanced image processing algorithms, the robot is able to analyze the subtle features of the skin surface in real-time, identify the morphology, location, and depth of the vein, and intelligently plan the navigation of the puncture path (Hu et al., 2023). The application of this technology not only improves the success rate of blood collection, but also significantly reduces the invasiveness to the patient and enhances the overall medical experience.
In terms of robot path planning and navigation, Li et al. in (Li et al., 2021a) developed a binocular vision-based robot navigation system for fingertip blood collection. The system obtains the coordinates of the fingertip blood collection point through 3D reconstruction and contour extraction, and optimizes the scale-invariant feature transform (SIFT) operator to improve the efficiency and stability of feature point description. The experimental validation results show that the method can quickly and accurately guide the robotic arm to move the blood collection needle to the target position, which effectively meets the navigation needs of the blood collection robot.
3.1.2 NIR-based vessel identification and localization
Infrared imaging technology is playing an increasingly important role in modern healthcare, especially in the automation of venipuncture and fingertip blood collection. Based on the reflective properties of hemoglobin to near-infrared (NIR) light, this technology can efficiently acquire venous image data to help medical robots localize blood vessels and perform precise manipulations.
The venipuncture robot developed by He et al. (He et al., 2023a) achieved accurate segmentation of vein images by combining near-infrared imaging with the SAU-Net model, with a segmentation accuracy of 91.2%, while the vein extraction rate was 86.7%. The average decision time of the system was 1.458 s. The embedded elbow vein blood collection robot studied by Wang et al. (Wang H. et al., 2023) combined NIR spectroscopy technology with deep learning algorithms to achieve high-precision recognition of elbow veins, which reasonably reduced the duplication of labor by healthcare workers and significantly improved the efficiency of blood collection. Meanwhile, Long et al. (Long et al., 2022) developed an automatic elbow vein puncture point detection method based on YOLOv5 and U-Net, which significantly improved the puncture efficiency and accuracy through efficient segmentation and precise localization, and the detection accuracy reached 0.993, which meets the clinical real-time demand.
3.1.3 Ultrasound-based vessel identification and localization
Ultrasound imaging plays a key role in interventional medicine, by using high-frequency sound waves to obtain three-dimensional coordinates of blood vessels, including important parameters such as diameter, depth, and vessel wall characteristics. Leipheimer et al. (Leipheimer et al., 2019) developed a handheld automated blood collection device that uses ultrasound imaging to identify vessels suitable for puncture and robotics to precisely guide the needle into the center of the vessel. This innovative device performed well in clinical trials with an overall success rate of 87% and a success rate of 97% in non-difficult venous participants, demonstrating its potential to significantly improve the efficiency and safety of blood collection. The authors in (Ning et al., 2023) proposed a novel approach that combines a weakly supervised ultrasound vascular segmentation network with a reinforcement learning strategy. This enabled the system to perform stable vascular imaging on different human surfaces without additional tuning. Meanwhile, Dong et al. (Dong et al., 2020) utilized deep learning and the Faster-RCNN algorithm to achieve coarse position recognition of blood vessels in ultrasound images and accurately measure the vessel positions and diameters by an automatic threshold segmentation algorithm. Such technological breakthroughs improved the repeatability and accuracy of the robot in venipuncture experiments.
The ultrasound-guided venipuncture vessel identification system proposed by Wu et al. (Wu et al., 2024) optimized the processing of blood vessels in ultrasound images by the K-means clustering method and designed a lightweight UV-YOLOv7 network to significantly improve the processing speed and accuracy of the model. The DN-DBSCAN algorithm introduced by the system effectively eliminates the misdetection region, resulting in a vessel localization accuracy of mAP 86.2%. Meanwhile, H. Watanabe et al. (Watanabe et al., 2024) used the U-Net convolutional neural network and traditional image processing techniques to achieve high-precision segmentation of blood vessels and puncture needles.
3.1.4 The integration of multiple technologies
Multimodal sensing technology realizes high-precision blood vessel localization and puncture operation by integrating multiple sensors such as near-infrared, ultrasound, and vision, and combining them with AI data fusion algorithms, which shows great potential in intelligent blood collection robot systems. The synergy of different sensors can make up for the limitations of a single sensor and provide reliable technical support for automated operations in complex medical environments.
3.1.4.1 Combination of visible light and infrared
Wang et al. (Wang C. et al., 2023)developed an intelligent blood collection robot, which realized accurate identification of blood vessels and automated blood collection through artificial intelligence machine vision and image navigation control technology. The technology adapted to diverse blood vessel characteristics through big data analysis and excelled in controlling blood collection volume and reducing pain, with a puncture success rate of 94.3%. Although the robot’s collection results differed in 11 anticoagulant indicators compared to manual blood collection, this did not affect the reliability of clinical diagnosis.
In terms of fingertip blood collection, the intelligent fingertip blood collection robot of Li et al. (Li et al., 2021c) optimized vein recognition by combining near-infrared imaging technology with a binocular vision system (Li et al., 2021a), and was able to increase the bleeding volume by automatically selecting the area of vein intersection as the blood collection point. The experimental results show that the maximum deviation between the needle and the blood collection point of this robot does not exceed 0.15 mm, and the blood collection time is less than 9.8 s, demonstrating the potential application of NIR imaging in fingertip blood collection scenarios.However, this combination also has limitations. Visible light imaging can be affected by skin color and lighting conditions, while infrared imaging may struggle with accurately determining the depth of blood vessels. Additionally, the integration of these two imaging modalities requires sophisticated algorithms and hardware to ensure real-time processing and accurate fusion of the images. Despite these challenges, the combination of visible light and infrared imaging offers a promising solution for improving the performance of intelligent blood collection robots.
3.1.4.2 Combination of visible light and ultrasound
The combination of ultrasound sensing and machine vision provides an efficient solution for vessel localization in complex medical scenarios. Ma et al. (Ma et al., 2021) developed a robotic system integrating an RGBD camera and a 2D ultrasound sensor to achieve safe scanning and accurate localization through a PID force controller and real-time calibration. The system was shown to have a positioning deviation of only 0.3 mm, which is close to the theoretical resolution of clinical ultrasound systems, and has built-in safety measures to support future human testing. The system utilizes surface point clouds to generate automated scanning trajectories, which are combined with real-time analysis of ultrasound images to successfully reconstruct blood vessels in three dimensions. This multimodal fusion technology significantly improves the accuracy and safety of vascular localization, laying the foundation for clinical applications.
Despite its advantages, the combination of visible light and ultrasound also presents challenges. Ultrasound imaging requires close contact with the skin and the use of coupling agents, which may introduce additional complexity and potential hygiene issues. Moreover, the interpretation of ultrasound images requires specialized knowledge and experience, and the quality of the images can be influenced by factors such as the patient’s body type and the presence of air pockets. These factors may affect the accuracy and reliability of blood vessel localization.
3.1.4.3 Combination of infrared and ultrasound
The combination of NIR and ultrasound is particularly common in vascular localization, with the advantage of utilizing NIR to achieve surface distribution detection of blood vessels while acquiring depth information through ultrasound. The authors in (Chen A. I. et al., 2020) developed a portable robotic system combining NIR and US imaging to achieve high-precision segmentation and depth estimation of blood vessels through deep learning, which demonstrated significantly better performance than manual operation in simulation and in vivo experiments, verifying its efficiency and clinical application value.
The Intelligent Venous Injection Robot (IVIR) developed by Kim et al. (Kim et al., 2024) uses NIR and US imaging to improve the accuracy of venipuncture. The system uses NIR imaging to determine the 2D position of the vessel and estimates the vessel depth through a U-net network for accurate 3D localization. In a simulated environment, the IVIR system achieved a puncture success rate of 97.3%, demonstrating high accuracy and reproducibility for vessels with diameters of 3 mm and above. Although this result originated in the field of injections, the precise localization technique is also applicable to the blood collection process. The Mixer-UNet model proposed by Ji et al. (Ji et al., 2022), on the other hand, significantly optimizes the fusion performance of NIR and US imaging in vein segmentation and 3D localization by combining UNet with MLP-Mixer structure. The model performed excellently in the segmentation task, with test results showing a segmentation accuracy of 93.% and an F1 score of 78.37%.
However, the integration of NIR and ultrasound imaging also has its limitations. NIR imaging may be affected by factors such as skin pigmentation and the presence of hair, which can interfere with the detection of blood vessels. Ultrasound imaging, as mentioned earlier, requires proper contact with the skin and may be sensitive to movements, which can lead to image distortion and affect the accuracy of depth estimation. Furthermore, the integration of these two imaging modalities demands advanced data fusion algorithms and computational resources to process and fuse the images in real time.
3.1.4.4 Comparison of different sensor combinations
Each sensor combination has its unique advantages and limitations, making them suitable for different clinical scenarios and patient populations. The combination of visible light and infrared imaging is ideal for situations where surface and subsurface blood vessel information is crucial, such as in patients with visible veins. It offers high-resolution imaging and the ability to detect veins beneath the skin, but may be less effective in determining the exact depth of the vessels. On the other hand, the combination of visible light and ultrasound provides detailed 3D information about the blood vessels, including their depth and diameter, making it suitable for more complex cases where precise localization is essential. However, it requires more specialized hardware and expertise to operate effectively. The integration of infrared and ultrasound imaging strikes a balance between surface and depth detection, offering a comprehensive view of the blood vessels. This combination is particularly useful in cases where both the surface distribution and depth of the vessels are critical for successful puncture. However, it also demands sophisticated algorithms for data fusion and interpretation, and may be more sensitive to external factors such as skin condition and patient movement. In conclusion, the choice of sensor combination depends on the specific requirements of the clinical application, the characteristics of the patient population, and the available technological infrastructure. Future research in this area should focus on developing more advanced data fusion algorithms and hardware systems that can maximize the strengths of each sensor while minimizing their limitations. This will enable intelligent blood collection robots to perform more accurately and reliably across a wider range of clinical scenarios.
3.2 Robotic arm design
In the design of venipuncture robots, the robotic arm, as a key moving component, is not only crucial for improving puncture accuracy, but also significantly reduces the patient’s discomfort experience through the optimized design of structure and control, as shown in Figure 2. Balter et al. Balter et al. (2016b) designed a 9-DOF venipuncture robot with integrated NIR and US imaging. The device achieves precise positioning through computer vision and force feedback, and the optimized mechanical configuration, integrated design of the imaging and puncture subsystems, and the addition of force sensors allow for sub-millimeter positioning accuracy and repeatability in the operational workspace.
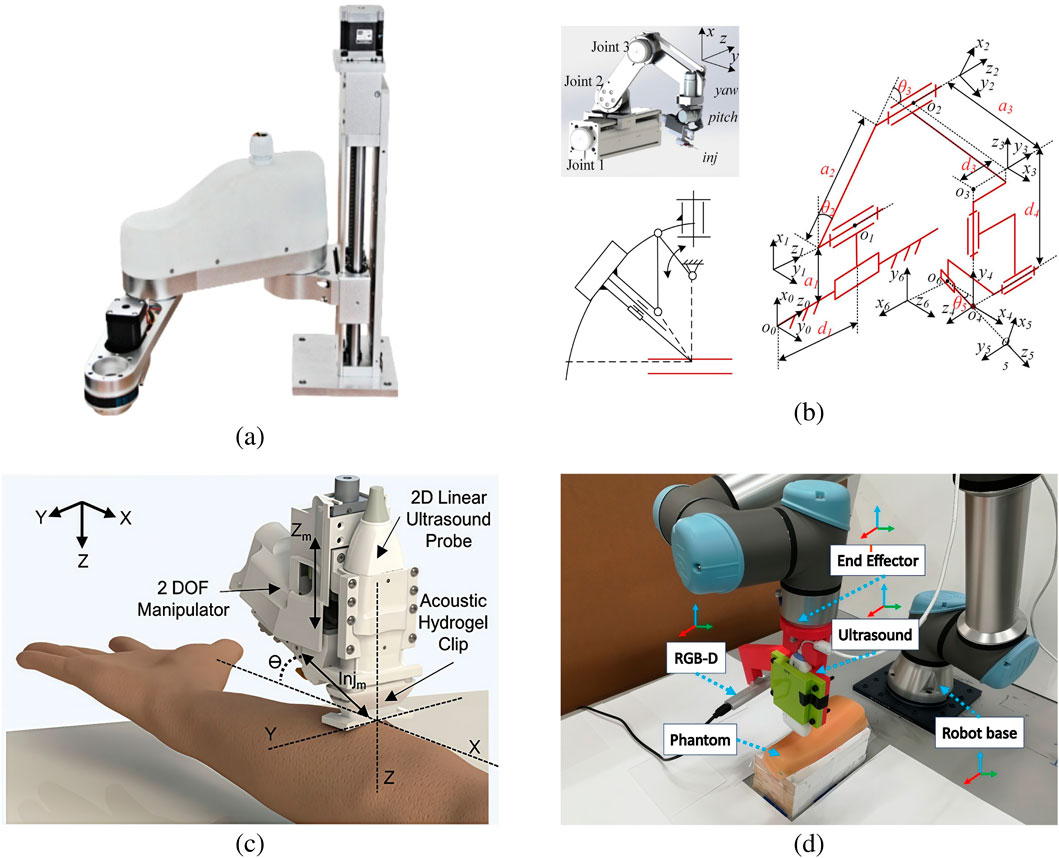
Figure 2. Several vascular puncture module designs. (a) Ultrasound-based puncture structure (Dong et al., 2020). (b) Camera and NIR-based puncture module design (Li et al., 2021b). (c) 3D model of the puncture device (Yang et al., 2024a). (d) Infrared-based puncture module (He et al., 2023a).
Yang et al. (Yang et al., 2024a) proposed a blood collection robot based on a rigid-flexible composite puncture strategy. The robot combines a 7-degree-of-freedom robotic arm with a cannulated needle design to avoid damage to the lower wall of the blood vessel during puncture. The feasibility of its composite puncture strategy and the accuracy of its trajectory planning are experimentally verified by solving the inverse kinematics using a differential evolutionary algorithm and trajectory planning using fifth-degree polynomial interpolation. This innovative strategy significantly improves puncture accuracy and provides technical support for reducing patient pain.
In addition, He et al. (He et al., 2023b) developed a 6-degree-of-freedom venepuncture robot with decoupled position and attitude control via near-infrared vision and force feedback. It adopts an improved double-parallel four-link structure, which makes the overall design more compact and the motion pattern concise and efficient. The needle tip position remains stable during the needle attitude adjustment process, which significantly improves the puncture accuracy and simplifies the operation control, demonstrating the advanced technology of the venipuncture robot and laying a solid foundation for its wide application in the field of intelligent medical treatment.
3.3 Puncture control
In addition to the precise positioning of blood vessels, the role of high-precision motion control systems in the blood collection process is crucial to effectively improve puncture accuracy and reduce patient pain. During venipuncture, biometric technology monitors the impedance changes of tissues in real-time through electrical impedance measurements, which can accurately differentiate between tissues such as blood vessels, fat and muscle. Specifically, the tip of the needle is equipped with an electrode sensor that applies a weak current and analyzes the feedback voltage signal to calculate conductivity. These data are not only used to determine the relative position of the needle tip to the tissues but also to construct a biomechanical model to simulate the interaction between the needle tip and the surrounding tissues to optimize the puncture path (Cheng et al., 2016). In addition, by combining the precise positioning and control system of the robot, this technique can automatically adjust the depth during the puncture process, which significantly improves the success rate and safety of the puncture.
To cope with possible complications during venipuncture, Liu et al. (Liu et al., 2021) proposed a method based on electrical impedance measurement. They used agar and gelatin to make tissue phantoms simulating blood, fat and skin, and measured the electrical conductivity of the phantoms by means of homemade electrode probes and sodium chloride solutions of different concentrations. The results showed that the conductivity of the fabricated phantom matched well with the real tissue data. In addition, Smirnova et al. (Smirnova et al., 2023) developed an automated vein visualization module based on bioimpedance measurements designed for intelligent blood collection robots. The module accurately recognizes the location of the vein by means of an array of electrodes, which guarantees an accuracy rate of over 90% for the puncture control unit. Compared to traditional ultrasound and optical imaging systems, this technology interferes less with patient movement and is particularly suitable for special groups such as pediatrics, enhancing the safety and comfort of the medical process.
4 Clinical applications
So far, a number of companies have launched commercial blood collection robots and have clinical applications in some of China’s leading hospitals, as shown in Figure 3.
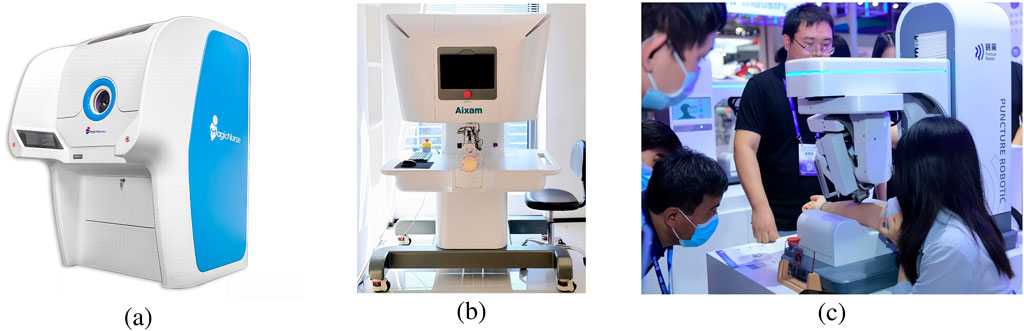
Figure 3. Several representative blood collection robots. (a) MagicNurse (Artery Network, 2023). (b) Aixam (Biocheng Group, 2024). (c) Hagong (Sohu News, 2023).
4.1 Commercially available intelligent blood collection robots
MagicNurse intelligent blood collection robot is an AI medical robot that can realize unmanned and standardized blood collection in the whole chain, and can replace nurses to collect venous blood automatically and unattended (Artery Network, 2023). By recruiting volunteers from the society, as of January 2021, MagicNurse robot has carried out more than 3,000 cases of real-life puncture blood collection tests, and the accuracy of the first needle puncture has reached about 95%.
In 2024, Kerry Medical released an optical-acoustic all-in-one mechanic’s multimodal intelligent perception puncture robot, the Aixam Divine Needle intelligent blood collection robot (Biocheng Group, 2024). The robot has completed animal experiments on a third-party experimental platform: blood collection from the tail vein of white rats, and the success rate of blood collection reaches 95%. In the animal experiments, the diameter of the puncture blood vessel ranges from 0.44 to 0.8 mm, with an average diameter of 0.61 mm, and the experimental blood collection needle diameter is 0.45 mm. The diameter of the experimental blood collection needle was 0.45 mm.
The Hagong blood collection robot (Sohu News, 2023) is equipped with body fluid and blood collection analysis, temperature monitoring, 5G remote diagnosis, automatic disinfection of negative pressure, etc. The device incorporates advanced technologies, including AI reconstruction recognition, image fusion navigation, and force feedback control. It is the inaugural system to offer real-time image analysis and rapid calculation of tissue morphology. The robot is capable of adopting CT and ultrasound image fusion alignment navigation, real-time feedback of soft tissue changes, ultrasound posture fitting, and solving the standard stay map.
On 30 May 2022, Vitestro presented the company’s development of an autonomous blood-drawing device (Vitestro, 2023). Vitestro’s device combines artificial intelligence-based ultrasound-guided 3D reconstruction with robotic control technology to ensure accurate and safe blood collection. In clinical studies, Vitestro has performed 1,500 automated blood draws on more than 1,000 patients using its prototype. A single healthcare professional can oversee multiple devices and manage multiple patients at the same time, thus alleviating the shortage of blood collection nurses in hospitals.
4.2 Clinical application cases of blood collection robot
On 17 September 2021, an intelligent blood collection robot was officially deployed in Sun Yat-sen Hospital of Fudan University (Government Affairs, 2023). This is the inaugural intelligent blood collection robot to be installed in Shanghai. As detailed in the paper published by the hospital’s doctors in 2023 (Wang C. et al., 2023), 154 volunteers from Sun Yat-sen Hospital of Fudan University were recruited over the 2-year period during which the robot was deployed. The results of anticoagulant blood samples were compared between the robotic and manual blood collection methods, and a questionnaire was used to ascertain the volunteers’ perceptions of the two methods of blood collection. Furthermore, the study gathered data pertaining to the utilization of robotic blood collection from 6,255 patients who had consented to this method of blood collection, and proceeded to analyze the success rate of said collection. The findings of the study indicated that the blood collection robot demonstrated superior performance compared to manual collection in terms of specimen volume, pain, and puncture success rate, with a puncture success rate of 94.3%. A total of 11 indicators demonstrated statistically significant differences between the anticoagulated blood specimens collected via robotics and those obtained through manual methods. However, these discrepancies did not impact the clinical diagnosis or prognosis.
On 3 June 2021, the first automatic blood collection robot in the province was officially put into use in the Fourth Hospital Affiliated to Zhejiang University School of Medicine (DXY, 2023). On that morning, the self-service blood collection robot successfully completed the blood collection service for over ten patients, achieving a 100% success rate.
In 2023, the First Hospital of Anhui Medical University established a digital intelligent blood collection facility at Jixi Road Hospital, comprising three MagicNurse intelligent puncture blood collection robots (Tang et al., 2023). From the second half of 2023 to May 2024, the aforementioned digital intelligent blood collection area has successfully completed blood collection for more than 5,100 patients. The automatic blood collection machine is capable of continuous operation, facilitating the completion of blood collection tasks at any given moment. Its functionality encompasses enhanced speed and success rates in blood collection, effectively transitioning from manual blind puncture to precise visual automatic puncture. This approach is particularly beneficial for individuals experiencing dizziness or discomfort during the blood collection process, while also mitigating the risk of potential complications.
5 Discussion
Despite encouraging progress, a number of challenges remain in the widespread adoption and optimization of artificially intelligent blood collection robots. A major challenge is ensuring the reliability and consistency of the technology across different patient populations. Variations in skin color, vein visibility and patient movement can affect robot performance, so there is a need to continually improve vessel recognition and positioning accuracy. Another challenge is the need to improve the safety and reliability of the device to ensure system stability under prolonged, high-frequency use. In addition, extensive training and education of healthcare providers is needed to effectively integrate these robots into clinical workflows.
The accurate location of blood vessels represents a fundamental challenge for the development of intelligent blood collection robots capable of automated puncture. Despite notable advances in vein recognition technology, including machine vision, near-infrared imaging, and ultrasound imaging, as well as other techniques, the complexities of clinical environments, such as light interference, the diversity of skin features, the depth of vessel location, and the variability of anatomical structures, continue to challenge the robustness of the algorithms employed. Furthermore, the potential for patients to experience changes in their physiological state due to external factors such as tension or movement serves to compound the challenge of accurate localization. It is therefore imperative that future research incorporates multimodal sensor data fusion techniques and introduces real-time adaptive learning models, thereby enabling the robot to dynamically capture changes in vascular features and achieve high-precision continuous tracking.
The conventional methodologies employed for the control and operation of robotic arms are inadequate for fulfilling the rigorous demands for flexibility in venipuncture procedures. It is essential that intelligent blood collection robots are able to respond rapidly to minor patient movements while simultaneously maintaining high-precision path planning of the robotic arm within three-dimensional space. This necessitates not only the optimization of the redundant degrees of freedom of the robotic arm, but also the enhancement of the force feedback sensing system, which enables it to precisely adjust the depth and angle of needle insertion in milliseconds, thus avoiding unnecessary damage to the surrounding tissues (Cheng et al., 2016). The future development of puncture operating systems will be focused on the creation of lighter, more sensitive models through the combination of flexible actuators with biomechanical modelling, achieved through the optimization of both hardware and software.
It is possible that sensors, actuators and control algorithms may experience a decline in performance over time when subjected to high-frequency use. Furthermore, the repeatability and positioning accuracy of the robotic arm may diminish over time. It is therefore essential that intelligent blood collection robots are equipped with efficient self-calibration and health monitoring modules that are capable of assessing the status of core components in real time. This will enable the early detection of any issues and the implementation of necessary adjustments to ensure that the equipment is always operating at optimal performance, thereby preventing accidents.
6 Conclusion
Intelligent blood collection robots represent a significant advancement in the field of medical automation. These devices are equipped with advanced capabilities, including autonomous vein detection and precise blood collection, which are enabled by machine learning, image recognition, and automatic control technologies. These technologies are poised to revolutionize the way blood is collected, potentially replacing traditional manual methods. Theoretical studies and clinical experience have demonstrated that intelligent blood collection robots have the potential to enhance the efficiency, accuracy and comfort of blood collection.
However, they also face challenges pertaining to technology, market acceptance, and cost. Currently, the market acceptance of robotic blood collection is relatively low, with a limited number of clinical applications in both domestic and international settings. Consequently, the market is currently in a state of cautious observation. Nevertheless, in light of the national focus on medical automation, it is anticipated that there will be an increase in the number of policies designed to facilitate the advancement and implementation of intelligent blood collection robots. The potential applications of intelligent blood collection robots are numerous and diverse. In addition to their suitability for use in hospitals, they can also be deployed in clinics, mobile blood collection vehicles, physical examination centers and other scenarios. It is anticipated that, in the future, as technology progresses and market demand increases, intelligent blood collection robots will become more widely applicable.
Author contributions
YW: Investigation, Writing – original draft. HR: Investigation, Visualization, Writing – original draft. YR: Investigation, Writing – original draft. QL: Writing – review and editing. CW: Writing – review and editing. ZF: Writing – review and editing, Funding acquisition, Supervision.
Funding
The author(s) declare that financial support was received for the research and/or publication of this article. This work was supported by the Zhejiang Provincial Basic Public Welfare Research Project under grant no. LGF22F010006.
Conflict of interest
The authors declare that they have no conflict of interest or personal relationships that could have appeared to influence the work reported in the current work.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Artery Network (2023). The world’s first certified blood sampling robot replaces nurses and goes into service
Balter, M. L., Chen, A. I., Fromholtz, A., Gorshkov, A., Maguire, T. J., and Yarmush, M. L. (2016a). “System design and development of a robotic device for automated venipuncture and diagnostic blood cell analysis,” in 2016 IEEE/RSJ international Conference on intelligent Robots and systems (IROS) (daejeon, korea (south)), 514–520. doi:10.1109/IROS.2016.7759102
Balter, M. L., Chen, A. I., Maguire, T. J., and Yarmush, M. L. (2016b). Adaptive kinematic control of a robotic venipuncture device based on stereo vision, ultrasound, and force guidance. IEEE Trans. Industrial Electron. 64, 1626–1635. doi:10.1109/TIE.2016.2557306
Beili, W., Wei, G., and Baishen, P. (2021). Interpretation of the health industry standard ’ws/t 661-2020 guidelines for venous blood sample collection. Chin. Med. J. 101, 4. doi:10.3760/cma.j.cn112137-20210223-00467
Biocheng Group (2024). 95% success rate! breakthrough achieved by the intelligent blood sampling robot made by biocheng
Brattain, L. J., Pierce, T. T., Gjesteby, L. A., Johnson, M. R., DeLosa, N. D., Werblin, J. S., et al. (2021). Ai-enabled, ultrasound-guided handheld robotic device for femoral vascular access. Biosensors 11, 522. doi:10.3390/bios11120522
Cao, X., Chen, Z., Lai, B., Wang, Y., Chen, Y., Cao, Z., et al. (2021). Venibot: towards autonomous venipuncture with automatic puncture area and angle regression from nir images. arXiv Prepr. arXiv:2105.12951. doi:10.48550/arXiv.2105.12951
Chen, A. I., Balter, M. L., Maguire, T. J., and Yarmush, M. L. (2015). “Real-time needle steering in response to rolling vein deformation by a 9-dof image-guided autonomous venipuncture robot,” in 2015 IEEE/RSJ international conference on intelligent robots and systems (IROS) (Hamburg, Germany), 2633–2638. doi:10.1109/IROS.2015.7353736
Chen, A. I., Balter, M. L., Maguire, T. J., and Yarmush, M. L. (2020a). Deep learning robotic guidance for autonomous vascular access. Nat. Mach. Intell. 2, 104–115. doi:10.1038/s42256-020-0148-7
Chen, Z., Lu, M., Chen, D., Lu, X., Zhang, L., Cui, Y., et al. (2020b). Clinical research on automatic vein recognition and localization technology of automated venipuncture robots. Chin. J. Clin. Pharmacol. 36, 3148–3150. doi:10.13699/j.cnki.1001-6821.2020.19.050
Cheng, Z. (2015). Exploration of methods to improve the success rate of venous blood collection in health examination centers. Everybody’s Health Mid-Month Ed. 9, 168–169.
Cheng, Z., Davies, B. L., Caldwell, D. G., and Mattos, L. S. (2016). “A venipuncture detection system for robot-assisted intravenous catheterization,” in 2016 6th IEEE international Conference on biomedical Robotics and biomechatronics (BioRob) (Singapore: ieee), 80–86. doi:10.1109/BIOROB.2016.7523602
Dong, J. (2019). Design and experiment of a principle prototype for venipuncture robot. Harbin, Heilongjiang, China: Harbin Institute of Technology. Master’s thesis.
Dong, L., Wang, Y., Liu, Y., Jiang, Z., Xu, T., and Deng, S. (2020). Development of an automatic venipuncture robot based on deep learning. Med. Health Equip. 41, 52–56. doi:10.19745/j.1003-8868.2020133
Dulon, M., Stranzinger, J., Wendeler, D., and Nienhaus, A. (2020). Causes of needlestick and sharps injuries when using devices with and without safety features. Int. J. Environ. Res. Public Health 17, 8721. doi:10.3390/ijerph17238721
DXY (2023). Zhejiang’s first fully automated blood sampling robot deployed at the fourth affiliated hospital of zhejiang university school of medicine
Government Affairs (2023). Shanghai’s first intelligent blood sampling robot officially “goes live” at zhongshan hospital affiliated to fudan university
He, T., Guo, C., and Jiang, L. (2023a). Puncture site decision method for venipuncture robot based on near-infrared vision and multiobjective optimization. Sci. China Technol. Sci. 66, 13–23. doi:10.1007/s11431-022-2232-5
He, T., Guo, C., Liu, H., and Jiang, L. (2023b). A venipuncture robot with decoupled position and attitude guided by near-infrared vision and force feedback. Int. J. Med. Robotics Comput. Assisted Surg. 19, e2512. doi:10.1002/rcs.2512
Hu, S., Lu, R., Zhu, Y., Zhu, W., Jiang, H., and Bi, S. (2023). Application of medical image navigation technology in minimally invasive puncture robot. Sensors 23, 7196. doi:10.3390/s23167196
Ji, J., Zhao, Y., Xie, T., Du, F., and Qi, P. (2022). “Automated vein segmentation from nir images using a mixer-unet model,” in International Conference on intelligent Robotics and applications (harbin, China), 64–75. doi:10.1007/978-3-031-13841-6_6
Kim, S., Choi, S., and Yeom, K. (2024). Design and development of robotic system for precise vascular access and autonomous venipuncture. Electron. Lett. 60, e13121. doi:10.1049/ell2.13121
Kobayashi, Y., Hamano, R., Watanabe, H., Hong, J., Toyoda, K., Hashizume, M., et al. (2013). Use of puncture force measurement to investigate the conditions of blood vessel needle insertion. Med. Eng. and Phys. 35, 684–689. doi:10.1016/j.medengphy.2012.12.003
Leipheimer, J. M., Balter, M. L., Chen, A. I., Pantin, E. J., Davidovich, A. E., Labazzo, K. S., et al. (2019). First-in-human evaluation of a hand-held automated venipuncture device for rapid venous blood draws. Technology 7, 98–107. doi:10.1142/s2339547819500067
Li, H., Chen, X., Cao, P., Wang, Y., Li, Y., Zeng, L., et al. (2017). Investigation on the status of needle stick injuries among nurses during venipuncture in China. Chin. J. Infect. Control 16, 816–819. doi:10.3969/j.issn.1671-9638.2017.09.006
Li, X., Ji, J., and Zhou, Q. (2021a). Fingertip blood sampling robot navigation system based on binocular vision. In journal of physics: conference series (beijing, China), vol. 2029, 012020. doi:10.1088/1742-6596/2029/1/012020
Li, X., Li, J., Wu, W., and Wang, T. (2021b). “Research on intelligent fingertip blood collection robot,” in Proceedings of the 2nd international symposium on artificial intelligence for medicine sciences (ISAIMS) (Beijing, China), 173–177. doi:10.1145/3500931.3500963
Li, X., Lin, J., Pang, Y., Huang, L., Zhong, L., and Li, Z. (2021c). Fingertip blood collection point localization research based on infrared finger vein image segmentation. IEEE Trans. Instrum. Meas. 71, 1–12. doi:10.1109/TIM.2021.3139707
Lin, G., Wang, H., Sha, M., Zeng, Y., Long, Y., and Liu, Y. (2022). “Design of a multi-data fusion intelligent venipuncture blood sampling robot,” in 2022 7th international Conference on Control and robotics engineering (ICCRE) (beijing, China), 10–15. doi:10.1109/ICCRE55123.2022.9770260
Liu, H. (2023). Research on perception and control of a venipuncture-assisted robot. China: Guangxi University of Science and Technology.
Liu, J., Goehring, C., Schiele, F., Möller, K., and Pott, P. P. (2021). Fabrication and experimental evaluation of simple tissue-mimicking phantoms with realistic electrical properties for impedance-based sensing. Int. J. Integr. Eng. 13, 127–136. doi:10.30880/ijie.2021.13.05.014
Liu, K. (2020). Research on motion planning and control of venipuncture robot. China: Master’s thesis, Xi’an University of Technology.
Long, Y., Wang, H., Sha, M., Lin, G., Liu, Y., and Zhu, J. (2022). “Research on the method of arm vein puncture point based on deep learning,” in 2022 2nd international conference on computer, control and robotics (ICCCR) (Shanghai, China), 162–166. doi:10.1109/ICCCR54399.2022.9790221
Ma, G., Oca, S. R., Zhu, Y., Codd, P. J., and Buckland, D. M. (2021). “A novel robotic system for ultrasound-guided peripheral vascular localization,” in 2021 IEEE international Conference on Robotics and automation (ICRA) (xian, China), 12321–12327. doi:10.1109/ICRA48506.2021.9561924
Ning, G., Liang, H., Zhang, X., and Liao, H. (2023). Autonomous robotic ultrasound vascular imaging system with decoupled control strategy for external-vision-free environments. IEEE Trans. Biomed. Eng. 70, 3166–3177. doi:10.1109/TBME.2023.3279114
Salcedo, E., and Peñaloza, P. (2023). “Edge ai-based vein detector for efficient venipuncture in the antecubital fossa,” in Mexican international conference on artificial intelligence (Yucatán, Mexico), 297–314. doi:10.1007/978-3-031-47640-2_24
Sha, M., Wang, H., Lin, G., Long, Y., Zeng, Y., and Guo, S. (2022). “Design of multi-sensor vein data fusion blood sampling robot based on deep learning,” in 2022 2nd international conference on computer, control and robotics (ICCCR) (Shanghai, China), 46–51. doi:10.1109/ICCCR54399.2022.9790122
Smirnova, A., Mugeb, A.-h., and Kudashov, I. (2023). “Visualization bio-impedance-based module for automated venepuncture robotic device,” in 2023 Systems and Technologies of the digital HealthCare (STDH) (tashkent, Uzbekistan), 114–117. doi:10.1109/STDH59314.2023.10490724
Sohu News (2023). Blood sampling robot: less painful? harbin institute of technology intelligent venipuncture robot debuts at the industrial expo
Tang, M., Gao, Y., and He, S. (2023). Blood collection robots! they are now in service in hefei. Douyin Video.
Wang, C., Gu, M., Zhu, J., Yang, S., Tang, W., Liu, Z., et al. (2023a). Clinical application of a fully automated blood collection robot and its assessment of blood collection quality of anticoagulant specimens. Front. Med. 10, 1251963. doi:10.3389/fmed.2023.1251963
Wang, H., Zhang, X., and Chen, H. (2023b). Embedded elbow vein blood collection robot system based on artificial intelligence technology. Int. J. Embed. Syst. 16, 36–46. doi:10.1504/IJES.2023.134126
Watanabe, H., Fukuda, H., Ezawa, Y., Matsuyama, E., Kondo, Y., Hayashi, N., et al. (2024). Automated angular measurement for puncture angle using a computer-aided method in ultrasound-guided peripheral insertion. Phys. Eng. Sci. Med. 47, 679–689. doi:10.1007/s13246-024-01397-x
Wu, H. (2022). Research on motion planning Algorithm of automatic blood sampling mechanism Based on deep reinforcement learning. Master’s thesis. Harbin, Heilongjiang, China: Harbin Institute of Technology.
Wu, J., Wei, G., Fan, Y., Yu, L., and Chen, B. (2024). B-ultrasound guided venipuncture vascular recognition system based on deep learning. Biomed. Signal Process. Control 87, 105495. doi:10.1016/j.bspc.2023.105495
Xue, Y. (2020). Industrial robot cross-border development of blood collection robots, exclusive application of ultrasound guided imaging
Yang, C., Xie, Y., Liu, S., and Sun, D. (2018). Force modeling, identification, and feedback control of robot-assisted needle insertion: a survey of the literature. Sensors 18, 561. doi:10.3390/s18020561
Yang, Z., Wen, S., Qi, Q., Lv, Z., and Ji, A. (2024a). A trocar puncture robot for assisting venipuncture blood collection. Robotica 42, 1597–1613. doi:10.1017/s0263574724000407
Yang, Z., Wen, S., Qi, Q., Zhang, X., Shen, H., Chen, G., et al. (2024b). “Design of composite puncture blood collection system and research on puncture force,” in Computer methods in biomechanics and biomedical engineering, 1–12doi. doi:10.1080/10255842.2024.2338474
Zhang, K., Zhang, C., Yu, B., Zhang, X., Gao, Y., Liu, J., et al. (2023). “Motion planning of an automatic blood sampling manipulator using ddpg algorithm,” in 2023 42nd Chinese control conference (CCC) (Tianjin, China), 7913–7917. doi:10.23919/CCC58697.2023.10241143
Keywords: intelligent blood collection robot, vascular recognition, machine vision, puncture control, clinical application
Citation: Wang Y, Ruan H, Ruan Y, Li Q, Wang C and Fang Z (2025) Intelligent blood collection robot: key technologies, clinical applications, and future challenges. Front. Bioeng. Biotechnol. 13:1587114. doi: 10.3389/fbioe.2025.1587114
Received: 04 March 2025; Accepted: 13 May 2025;
Published: 30 May 2025.
Edited by:
Kuangwen Hsieh, Johns Hopkins University, United StatesReviewed by:
Svitlana Kopyl, University of Aveiro, PortugalCopyright © 2025 Wang, Ruan, Ruan, Li, Wang and Fang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Zhaoxi Fang, ZmFuZ3poYW94aUB1c3guZWR1LmNu