 Lahcen Boulaasair
Lahcen Boulaasair Hassane Bouzahir1
Hassane Bouzahir1 Mamadou Abdoul Diop
Mamadou Abdoul Diop- 1Ingénierie des Systèmes et Technologie de l'information (ISTI) Lab, Ibn Zohr University, Agadir, Morocco
- 2Electrical Department, Universidade Tecnológica Federal do Paraná (UTFPR), Curitiba, Brazil
- 3Laboratoire d'Analyse Numérique et Informatique, UFR Sciences Appliquées et Technologies, Université Gaston Berger, Saint-Louis, Senegal
Urban-population growth model has attracted attention over the last few decades due to its usefulness in representing population dynamics, virus dynamics, and epidemics. Researchers have included stochastic perturbation in the urban-population growth model to improve the model, attempting to capture the random nature of real-time dynamics. When doing so, researchers have presented conditions to ensure that the corresponding stochastic solution is both positive and unique (in probability). This paper advances that knowledge by showing that the stochastic diffusion constant can be both positive and negative—previous results in the literature have required that such a constant be positive only. A numerical simulation illustrates the paper's findings.
1. Introduction
The Hokkaido prefecture, in Japan, had experienced a severe economic crisis that hit hard the social and living situation in that region [1]. Searching for better opportunities, individuals living in the countryside of that region started moving to the Sapporo city, capital of the Hokkaido prefecture. This migration led to an unbalance in Hokkaido's population distribution and created all kinds of social problems [1].
In an attempt to understand the population dynamics within the Hokkaido prefecture, a group of researchers has applied real-time population data to the so-called dynamic self-organization theory [see [1]]. This theory was first developed by Nicolis and Prigogine [2] in the classical monograph; this theory tries to explain a phenomenon in which a system organizes itself through internal and external interactions within the local population. The key idea is to let the interactions between two local populations be driven by a system of two deterministic differential equations. In formal terms, the deterministic differential equations are [e.g., [1]]
where x1(t) and x2(t) are positive terms that represent the population on the first and second region, respectively, and the constants ki, Ni, and di, i = 1, 2, are positive and known constants. The constant β > 0 sets the interdependence level between the two regions [cf., [1]].
The authors of [1] have considered a linearization of the model (1) at the point , finding conditions for local stability, valid only around the point . Another study has shown that (1) has four different equilibrium points and that xi(t), i = 1, 2, converges to one of these points as t increases to infinity [see [3]]. When reaching a convergence point, the two regions' population enters into equilibrium [cf., [3]]. In other words, the asymptotic stability of the system (1) is completely characterized by the authors of [3]. However, as pointed out in [[4], Chapter 5], the model in (1) remains incomplete because (1) does not account for random fluctuations that usually drive the behavior of population dynamics.
Researchers have become interested in stochastic differential equations for modeling population dynamics because these equations have proved to be useful in a variety of applications, such as in epidemics [5–7], fish population [8], phytoplankton concentration [9], HIV (virus) dynamics [10, 11], dengue [12], and tumor cell growth [13]. Researchers have even considered the stochastic version of the deterministic two-region population dynamics shown in (1) [e.g., [14–16]]. What researchers have proposed is, in fact, a stochastic model that simply adds the term σixi(t)dBi(t), i = 1, 2, in (1), where Bi(t) denotes the standard unidimensional Brownian motion. The resulting stochastic differential equation is then studied in a way that the corresponding solution is unique [14–16]. To ensure uniqueness, the authors of [14–16] require that σi > 0, i = 1, 2; however, as we show in this paper, that condition is unnecessary—we show that σi, i = 1, 2, can be both positive and negative. This finding represents the main contribution of this paper.
The main contribution of this paper is to show the conditions that guarantee the stochastic urban-population growth model have a unique, positive solution. What this paper advances with respect to the previous results from the literature [e.g., [14–16]] is that this paper shows uniqueness and positiveness of solution without the classical assumption that σi > 0, i = 1, 2. This paper then expands the application of the result in [14–16] for the two-dimensional stochastic urban-population growth model. The main result of this paper is illustrated through a numerical simulation.
Notation: The set of (positive) real numbers is denoted by ℝ (ℝ+), and the corresponding n-th dimensional (positive orthant) Euclidean space is denoted by ℝn (). Given two scalars x1 and x2, we define x1∨x2 = max(x1, x2) and x1∧x2 = min(x1, x2). The symbol |x| computes the Euclidean norm of x ∈ ℝn. The symbol 𝟙{·} stands for the Dirac measure. Every stochastic process studied in this paper evolves upon a fixed, filtered probability space .
2. Existence and uniqueness of the stochastic urban-population growth model
This section shows conditions to ensure the existence and uniqueness of solutions for the stochastic urban-population growth model. We emphasize that this paper is not the first to characterize the existence and uniqueness of solutions for such a system [e.g., [14–16]]; however, we show that a condition required by the authors of [14–16] is unnecessary, as detailed in the sequence.
The stochastic model studied in this paper arises from the Itô's extension of the system (1) with αi = Ni−di/ki, i = 1, 2, which equals
where ki, αi, xi(0), i = 1, 2, and β are positive, given scalars. In this paper, the constants σi ∈ ℝ, i = 1, 2, have no specific sign, in contrast to the studies in [14–16] that require σi > 0, i = 1, 2.
Now we recall the meaning of a solution for the system (2).
Definition 2.1 ([17], p. 48; [18], Definition 6.1.3, p. 101). We say xi(t), i = 1, 2, is a solution for the system (2) if (i) {xi(t)} is continuous and -adapted, and (ii) the equation in (2) is valid for all t > 0 with probability one.
Remark 1. As proved in the monograph [[18], Coro. 6.3.2, p. 112] any stochastic differential equation with both drift term and diffusion term satisfying the locally Lipschitz condition has a solution within a bounded time frame [see also the proof of Theorem. 2.1 in [15] for a discussion]. As for the stochastic system (1), both the drift terms , i = 1, 2, and the diffusion terms xi↦σixi, i = 1, 2, satisfy the local Lipschitz condition. Thus, the result in [[18], Coro. 6.3.2, p. 112] ensures that (2) has a solution xi(t), i = 1, 2.
Definition 2.2. We say a solution xi(t), i = 1, 2, is unique if any other solution , i = 1, 2, is indistinguishable from xi(t), i = 1, 2, that is,
Next, we introduce the concept of positive solution for the stochastic population model in (2).
Definition 2.3. We say the solution xi(t), i = 1, 2, from (2) is positive if, given any initial condition xi(0) ∈ ℝ+, i = 1, 2, there holds
Now we can present the main result of this paper.
Theorem 2.1. The solution xi(t), i = 1, 2, from (2) is both positive and unique.
The proof of Theorem 2.1 is postponed to Section 2.2.
Remark 2. The authors of [14–16] have attained the same result of Theorem 2.1 under the assumption that σi > 0, i = 1, 2; however, as stated in Theorem 2.1, this assumption is unnecessary. For this reason, Theorem 2.1 expands the usefulness of the result from [14–16] for the stochastic urban-population growth model as in (2).
2.1. Numerical simulation
This section illustrates the result of Theorem 2.1 through a simulation. In (1), we set xi(0) = 0.5, σi = −1, i = 1, 2, k1 = 0.2, k2 = 0.3, α1 = 0.6, α2 = 0.5, and β = 0.5. We performed a Monte-Carlo simulation on (1) with one-thousand sample paths, each simulation taking 120 seconds. To simulate (1), we employed the Euler-Maruyama procedure as in [19] with step size of 10−5.
For all the Monte-Carlo samples taken randomly, we observed that both x1(t) and x2(t) were positive—this numerical evidence confirms the positiveness of the solution xi(t), i = 1, 2, as discussed in Remark 1. Even though this positiveness is already characterized in the results of [14–16], these results apply only under the condition that σi > 0, i = 1, 2. This condition is unnecessary, as discussed in Remark 2; note that the numerical simulation suggested the result hold with σi = −1, i = 1, 2.
Figure 1 shows the corresponding mean and standard deviation taken for the minimum value between x1(t) and x2(t). The corresponding data indicate that both x1(t) and x2(t) are positive and unique, in accordance with Theorem 2.1.
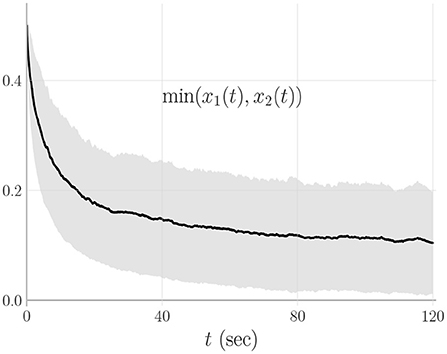
Figure 1. Mean (black) and standard deviation (light gray) curves of one thousand sample paths.
2.2. Proof of Theorem 2.1
Proof. The proof of Theorem 2.1 is divided into two parts. In the first part, we show that xi(t), i = 1, 2, is positive; in the second part, we show that xi(t), i = 1, 2, is unique.
Part I: the solution xi(t), i = 1, 2, from (2) is positive for all t > 0.
To see that any solution xi(t), i = 1, 2, satisfying (2) is positive, set i = 1 in (2) to write the identity
Therefore,
which yields
It then follows from (3) that x1(t) ∈ ℝ+ for all t > 0 provided that x1(0) ∈ ℝ+. A similar reasoning applied in (2) with i = 2 shows that x2(t) ∈ ℝ+ for all t > 0 provided that x2(0) ∈ ℝ+. This argument proves that the stochastic system (2) has a positive solution provided that xi(t) ∈ ℝ+, i = 1, 2.
Part II: the solution xi(t), i = 1, 2, from (2) is unique.
To prove the assertion of Part II, we begin with a change of variable upon (2). Namely, set ui(t) = ln xi(t), i = 1, 2, and apply upon them the Itô's formula [e.g., [17], p. 36, Theorem 6.4; [20], p. 48, Theorem 4.2.1] to obtain
with i = 1, 2. It follows that the solution ui(t), i = 1, 2, from (4) is unique if and only if the solution xi(t), i = 1, 2, from (2) is unique. From now on, we focus our analysis on the solution ui(t), i = 1, 2, from (4).
Define , i = 1, 2, as
As a result, the dynamics in (4) is identical to
with ui(0) = ln xi(0), i = 1, 2.
Now our task is to ensure that the solution ui(t) has a finite growth whenever the time t > 0 is finite. To see that this finite growth holds, let us consider a constant η > 0 that satisfies |u|∨|v| ≤ η, where and . As shown in the Appendix, there exists some constant c = c(η) > 0 such that
that is, fi, i = 1, 2, are locally Lipschitz continuous. Let ui(t), vi(t), i = 1, 2, be two solutions taken from (6). It follows from (6) that
Applying the expected value operator on both sides of (8), together with the inequality in (7), we obtain (for all t ∈ [0, T] with given t > 0)
Finally, the Grönwall's inequality applied in (9) yields [see [17], p. 53]
The identity in (10) means that u(t) = v(t) for all t ∈ [0, T], which means that the system (4) has a unique solution on the interval [0, T]. As a result, the solution xi(t), i = 1, 2, from (2) is unique when t belongs to the interval [0, T].
It remains to show that xi(t), i = 1, 2, is unique for all t > T when T increases toward infinity. To show this result, we consider the Lyapunov-like function as
The idea is to use V(·) as in (11) to show that the solution xi(t), i = 1, 2, from (2) cannot diverge to infinity while t is finite.
Using the Itô's formula [e.g., [17], p. 36, Theorem 6.4; [20], p. 48, Theorem 4.2.1] in both (2) and (11) yields
Since both x1(t) and x2(t) are positive (see Part I), we can see that the right-hand side of (12) is bounded from above by
where
Taking the expected value operator on both sides of (12), we obtain
Since the expression x − 2 ln(x) is positive when x is positive (see Figure 2), we can write
Substituting (14) into the right-hand side of (13), and considering the definition of V(·) in (12), we can conclude that
Finally, the solution of (15) satisfies
Even though the term 𝔼[V(x(t))] can increase when t increases, we now know from (16) that the growth of 𝔼[V(x(t))] is limited from above by an exponentially increasing curve. This curve ensures that (2) has a solution xi(t), i = 1, 2, which cannot to diverge to infinity in finite time, as the next argument proves.
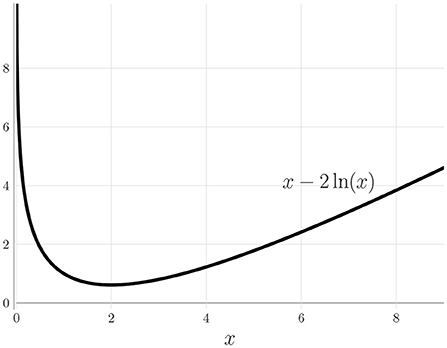
Figure 2. The curve indicates that x − 2 ln(x) is positive when x is positive.
To complete the proof, we proceed with a contradiction argument. Suppose from now on that there exists a finite number Te>0 such that tends to infinity when t approaches Te. Let t0 > 0 be the time in which at least either x1(t0) or x2(t0) is greater than one. Define the stopping times
It follows from (17) that
almost surely. Note that each stopping time Tn belongs to the interval [t0, Te) and Te > 0 is assumed to be finite. In the next argument, we show that the sequence {Tn} diverges to infinity (almost surely) and, as a consequence, that Te = ∞. Note that Te = ∞ contradicts our initial assumption that Te > 0 is finite.
Let us keep our initial assumption that Te > 0 is finite. The fact that Tn < Te for all n > 1 (almost surely) means that
Any realization (i.e., sample-path) of Tn, taken from the underlying sample space Ω, results from (17) that x(Tn)) > n − ln(n) for each n > 1. Thus,
Combining (16), (19), and (20) yields
which is absurd because the term on the left-hand side of (21) tends to infinity when n tends to infinity, while the term on the right-hand side of (21) remains finite. This contradiction proves that Te = ∞, and as a result, the solution xi(t), i = 1, 2, from (2) is unique for all t > 0.
3. Concluding remarks
This paper has shown conditions that ensure the positiveness and uniqueness of a stochastic urban-population growth model. This stochastic system has been studied in the literature for n-th dimensional systems [e.g., [14–16]], yet the results available so far require the diffusion constant σi be positive. As we have shown in Theorem 2.1, σi can be both positive and negative for two-dimensional systems (i.e., n = 2). For this reason, Theorem 2.1 can be seen as an extension of the results from [14–16] for two-dimensional systems.
The usefulness of Theorem 2.1 is illustrated through a Monte-Carlo simulation. The simulation was performed for the stochastic urban-population growth model with σi = −1, i = 1, 2 (see Section 2.1), and the corresponding data indicate that the system trajectories are both positive and unique—this numerical evidence confirms the novelty of Theorem 2.1.
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author/s.
Author contributions
LB, HB, and MD made substantial contributions to the design of the work and generated the data. AV made the interpretation of data and revision of the text. All authors have read and approved the final manuscript.
Funding
Research supported in part by the Brazilian agencies CAPES grant 88881.030423/2013-01 and CNPq grant 305158/2017-1 and 401572/2016-1.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher's note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
1. Miyata Y, Yamaguchi S. A study on Evolution of Regional Population Distribution Based on the Dynamic of Self-Organization Theory. Environmental Science, Hokkaido University (1990). p. 1–33.
2. Nicolis G, Prigogine I. Self-Organization in Nonequilibrium Systems. Hoboken, NJ: John Wiley and Sons, Inc. (1977).
3. El Ghordaf J, Hbid ML, Arino O. A mathematical study of a two-regional population growth model. Compt Rendus Biol. (2004) 327:977–82. doi: 10.1016/j.crvi.2004.09.006
4. May RM. Stability and Complexity in Model Ecosystems. Princeton, NJ: Princeton University Press (2019).
5. Cai S, Cai Y, Mao X. A stochastic differential equation SIS epidemic model with two independent Brownian motions. J Math Anal Appl. (2019) 474:1536–50. doi: 10.1016/j.jmaa.2019.02.039
6. Zhao Y, Jiang D. The threshold of a stochastic SIS epidemic model with vaccination. Appl Math Comput. (2014) 243:718–27. doi: 10.1016/j.amc.2014.05.124
7. Lu C, Liu H, Zhang D. Dynamics and simulations of a second order stochastically perturbed SEIQV epidemic model with saturated incidence rate. Chaos Solitons Fract. (2021) 152:111312. doi: 10.1016/j.chaos.2021.111312
8. Yoshioka H, Yaegashi Y. Stochastic optimization model of aquacultured fish for sale and ecological education. J Math Indus. (2017) 7:1–23. doi: 10.1186/s13362-017-0038-8
9. Møller JK, Madsen H, Carstensen J. Parameter estimation in a simple stochastic differential equation for phytoplankton modelling. Ecol Model. (2011) 222:1793–9. doi: 10.1016/j.ecolmodel.2011.03.025
10. Dalal N, Greenhalgh D, Mao X. A stochastic model for internal HIV dynamics. J Math Anal Appl. (2008) 341:1084–101. doi: 10.1016/j.jmaa.2007.11.005
11. Djordjevic J, Silva CJ, Torres DFM. A stochastic SICA epidemic model for HIV transmission. Appl Math Lett. (2018) 84:168–75. doi: 10.1016/j.aml.2018.05.005
12. Din A, Khan T, Li Y, Tahir H, Khan A, Khan WA. Mathematical analysis of dengue stochastic epidemic model. Results Phys. (2021) 20:103719. doi: 10.1016/j.rinp.2020.103719
13. Liu X, Li Q, Pan J. A deterministic and stochastic model for the system dynamics of tumor-immune responses to chemotherapy. Phys A Stat Mech Appl. (2018) 500:162–76. doi: 10.1016/j.physa.2018.02.118
14. Du NH, Sam VH. Dynamics of a stochastic Lotka-Volterra model perturbed by white noise. J Math Anal Appl. (2006) 324:82–97. doi: 10.1016/j.jmaa.2005.11.064
15. Mao X, Marion G, Renshaw E. Environmental Brownian noise suppresses explosions in population dynamics. Stochast Process Appl. (2002) 97:95–110. doi: 10.1016/S0304-4149(01)00126-0
16. Mao X, Sabanis S, Renshaw E. Asymptotic behaviour of the stochastic Lotka-Volterra model. J Math Anal Appl. (2003) 287:141–56. doi: 10.1016/S0022-247X(03)00539-0
17. Mao X. Stochastic Differential Equations and Applications. Cambridge: Woodhead Publishing (2008). doi: 10.1533/9780857099402
18. Arnold L. Stochastic Differential Equations: Theory and Applications. Hoboken, NJ: Wiley-Interscience (1974).
19. Higham DJ. An algorithmic introduction to numerical simulation of stochastic differential equations. SIAM Rev. (2001) 43:525–46. doi: 10.1137/S0036144500378302
20. Oksendal B. Stochastic Differential Equations: An Introduction With Applications (Universitext). 5th Edn. Heidelberg; New York, NY: Springer-Verlag (2010).
Appendix
The function , i = 1, 2, defined in (5), reads as
Hence,
After a simple algebraic manipulation, we can show that
Consider a constant η > 0 that satisfies |u|∨|v| ≤ η, where and . According to the Lagrange finite-increments formula, there exists some constant ξ ∈ ℝ within the interval from to such that |exp(vi)−exp(ui)| = exp(ξ)|vi−ui|. This fact, together with the inequality in (22), allows us to ensure the existence of some constant c = c(η) > 0 such that
The inequality in (23) means that fi, i = 1, 2, are locally Lipschitz continuous.
Keywords: stochastic system, urban-population growth model, positive systems, uniqueness of solution, stochastic evolution equation
Citation: Boulaasair L, Bouzahir H, Vargas AN and Diop MA (2022) Existence and uniqueness of solutions for stochastic urban-population growth model. Front. Appl. Math. Stat. 8:960399. doi: 10.3389/fams.2022.960399
Received: 02 June 2022; Accepted: 31 August 2022;
Published: 21 September 2022.
Edited by:
Xinsong Yang, Sichuan University, ChinaReviewed by:
Teklebirhan Abraha, Aksum University, EthiopiaShaobo He, Central South University, China
Copyright © 2022 Boulaasair, Bouzahir, Vargas and Diop. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Mamadou Abdoul Diop, bWFtYWRvdS1hYmRvdWwuZGlvcEB1Z2IuZWR1LnNu