 Fadil Inceoglu
Fadil Inceoglu Néstor J. Hernández Marcano
Néstor J. Hernández Marcano Rune H. Jacobsen
Rune H. Jacobsen Christoffer Karoff
Christoffer Karoff- 1Department of Engineering, Aarhus University, Aarhus, Denmark
- 2Cooperative Institute for Research in Environmental Sciences, University of Colorado Boulder, Boulder, CO, United States
- 3National Centers for Environmental Information, National Oceanographic and Atmospheric Administration, Boulder, CO, United States
- 4Department of Geoscience, Aarhus University, Aarhus, Denmark
The gamma-ray burst monitor (GBM) on the Fermi Gamma-Ray Space Telescope, for the first time, detected a short gamma ray burst (SGRB) signal that accompanies a gravitational wave signal GW170817 in 2017. The detection and localization of the gravitational wave and gamma-ray source led all other space- and ground-based observatories to measure its kilonova and afterglow across the electromagnetic spectrum, which started a new era in astronomy, the so-called multi-messenger astronomy. Therefore, localizations of short gamma-ray bursts, as counterparts of verified gravitational waves, are of crucial importance since this will allow observatories to measure the kilonovae and afterglows associated with these explosions. Our results show that an automated network of observatories, such as the Stellar Observations Network Group, can be coupled with an interconnected multi-hop array of CubeSats for transients (IMPACT) to localize SGRBs. IMPACT is a mega-constellation of
1 Introduction
The first detection of the gravitational wave (GW) signal from GW150914, which was produced by the mergers of stellar-mass black hole (BH) binaries, by the Laser Interferometer Gravitational Wave Observatory (LIGO) in 2015 (Abbott et al., 2016b), has opened a new era in GW astronomy. The LIGO consists of two observatories located in Hanford Site, WA, and in Livingston, LA, in the United States. The position of the detected GW signal source was calculated using time difference of arrival (TDoA) of the signals at the two detectors, and it was localized to an area of 600 deg2 in the sky (Abbott et al., 2016a; Abbott et al., 2016c). Three years after its first detection, LIGO in the United States and Virgo, another observatory in Santo Stefano, Macerata, Italy, observed GW signals from GW170814. This helped the two teams to confine the position of the source to 60 deg2 in the sky because the third observatory provided additional TDoA information (Abbott et al., 2017a).
In addition to the mergers of the stellar-mass BH binaries, the GWs can also be produced by the mergers of neutron star (NS) binaries and NS-BH binaries (Phinney, 1991; Anderson et al., 2008), which are the most promising candidates for generating electromagnetic counterparts to the GWs (Connaughton et al., 2016). These electromagnetic counterparts, which involve NSs, are proposed to be short gamma-ray bursts (SGRBs). The Advanced LIGO and advanced Virgo gravitational wave detectors have observed the first GW signal coming from a NS-NS binary spiraling in toward each other on August 17, 2017. Complementary to the detected GW signals, the gamma-ray burst monitor (GBM) on Fermi Gamma-Ray Space Telescope detected a short gamma-ray burst, GRB 170817A, 1.7 s after the coalescence, supporting the first hypothesis of a neutron star merger. These subsequent detections made by GW and gamma-ray observatories provided, for the first time, the direct evidence that merging neutron star binaries generate short gamma-ray bursts and GWs. Fast localization and identification of the electromagnetic counterparts enabled observations of the source across the whole energy spectrum from radio to gamma-ray wavelengths. This joint observational effort, the so-called multi-messenger astronomy, provides insights into astrophysics, dense matter, gravitation, and cosmology (Abbott et al., 2017b).
Gamma-ray bursts (GRBs) are rapid and intense high-energy prompt emissions peaking in the gamma-ray energies (hundreds of keV to MeV), with extended afterglows from radio to X-rays, GeV and even up to TeV gamma rays (D’Avanzo, 2015; Abdalla et al., 2019; Acciari et al., 2019a; Acciari et al., 2019b; Ajello et al., 2019). The durations of the detected GRBs show a bimodal distribution, with local maxima at
Following the detection of a potential SGRB candidate, the communications payload of space-based gamma-ray observatories downlinks the data for confirmation and analysis. The communications downlink conveys SGRB descriptive parameters as data packets transmitted through link and networking interfaces, whose end points are the mission control facilities on ground. Given the short time durations of SGRBs, the communications payloads of these missions are designed to ensure a low-latency downlink between the observatory and mission control to perform follow-up observations. Therefore, communications parameters such as link distance, packet size, and data bit rates, which we refer simply as bit rate from now, are critical in determining the delay performance of a communications payload.
All space-based gamma-ray observatories, such as the Compton Gamma-Ray Observatory, the Fermi Gamma-Ray Space Telescope, and the Neil Gehrels Swift Observatory, are very large and expensive satellite missions. As an emerging alternative platform, CubeSats can provide smaller, cheaper, and faster solutions (Twiggs, 2003). CubeSats arranged in a mega-constellation for global coverage, defined as a large number of CubeSats in various orbital planes that are synchronized and operate together, can increase the field of view (FOV) to the whole sky and therefore can help increase the number of detected SGRBs. Such constellations introduce several communication hops as in the case of a mega-constellation used for detecting SGRBs. Further, they are also equipped with communication payloads fast enough to enable them to convey the potential GRB detection message within time frames similar to those of large and expensive observatory missions.
The message packets consist of sequential groups of bits known as symbols, which define the amplitude, frequency, and phase of the wave signals transmitted. The received signals on ground used to reconstruct the data packets might suffer from absorption, refraction, or dispersion at specific time, which affects the original bits inducing bit errors and making the data packets unusable. To counter this problem, the communications payload uses forward error correction (FEC) (Hamming, 1950), which adds redundant bits that allow to detect and correct erroneous bits previously received. A packet loss, also known as a packet erasure, occurs when a packet arrives with internal errors at the bit level that cannot be corrected even after employing error correcting codes. In this case, the whole packet is discarded, even if some sections of it are useful. A packet loss can also be considered as having occurred when packets do not arrive at all when supposed to. For all these cases, a new type of FEC is implemented above the bits at the packet level known as erasure correcting code. This is achieved by creating redundant packets (instead of redundant bits) as combinations of original ones, which translates in more transmissions utilized to recover when packet losses occur. Thus, erasure correcting codes ensure all data packets are correctly received. However, there is a trade-off between the tolerable delay and the amount of redundant transmissions needed for protection. This depends on the needs of the given mission scenario and is therefore of great interest to search for codes that minimize their introduced redundancy.
Among the alternatives for erasure correcting codes as FEC, block codes such as Reed–Solomon (Reed and Solomon, 1960), low-density parity check (LDPC) (Gallager, 1962), or rate-less codes such as Raptor (Shokrollahi, 2006) could be utilized to cope with packet losses. However, these codes have the drawback of working on a point-to-point basis. This implies that a set of packets needs to be encoded and decoded for every time they are sent between a transmitter and a receiver. Codes based on point-to-point communication incur in delays which are critical for transient applications, given the need of several hops before reaching the ground system for analysis. For this case, network coding (NC) (Ahlswede et al., 2000), particularly RLNC (Ho et al., 2006), provides an advantage against traditional codes since it does not require to encode and decode on a hop basis. Instead, RLNC sends coded packets as linear combinations of the original set, removing the need to get each individual packet by conveying linearly independent coded packets. This has also the advantage of not acknowledging each single packet, but once the whole set is decodable (Sundararajan et al., 2008). Thus, RLNC-coded packets can be forwarded faster in a potential multi-hop network to reduce the transmission delay when considering packet losses.
Here, we will calculate, using a first-order approach, the average number of CubeSats required in an interconnected multi-hop array of CubeSats for transients (IMPACT) to localize an SGRB with high accuracy and the time it takes for the signal to be transmitted to a ground station on Earth. We assume that each CubeSat in the mega-constellation carries a gamma-ray detector for energy ranges of 50–300 keV, with an effective area between 400 and 600 cm2 mounted on the largest side surface (20 cm
The SGRBs are most likely associated with GWs, and an accurate and prompt localization of the source of these events will enable us to perform follow-up measurements of the afterglows using an automated network of ground-based observatories such as SONG. As an automated network of observatories, SONG can perform photometric and spectroscopic measurements. The FOV of the SONG telescope is
In this work, we define a mega-constellation of CubeSats to detect SGRBs, present a discussion about ideal payloads, and analyze the communication parameters for downlinking the data promptly. Our contributions can be listed as follows:
We review the properties of state-of-the-art scintillation crystals and their readout electronics to ensure we meet the energy range, light yield, decay time, and time resolutions to localize SGRBs with high accuracy.
We calculate the number of CubeSats required to localize SGRBs with our proposed guidelines, regardless of their origin in space, and for a given accuracy and time uncertainty based on the geometrical properties of the detecting constellation.
We perform a timing analysis in terms of wave propagation time and data transmission time to observe the effects of the communication system parameters in the event report delay, where we propose RLNC as a suitable erasure correcting code for this mega-constellation (Hernández Marcano and Jacobsen, 2019). Our analysis reveals that the interplay between constellation and communication parameters allows reducing the total communication delay, reaching performance metrics with similar order of magnitude of scientific space missions. We also find that ideal constellation configurations that minimize the total communication delay for the worst case scenario existing for a given set of parameters. To the best of our knowledge, this is the first time that such analysis is presented.
Our work is organized as follows: Section 2 describes the CubeSat technology, trends, and prior work regarding detection of SGRBs. In Section 3, we present our guidelines for gamma ray detectors, where the localization method is described in Section 4. The communications scheme that each CubeSat has to convey the event to ground is presented in Section 5. Section 6 indicates how the constellation is constructed to ensure that we reach a given total number of satellites for the detection requirements. In Section 7, we present our analyses and results for the required number of satellites for a given localization accuracy and time delay uncertainty, and the total delay for a given set of communication parameters and different configurations. Section 8 presents the discussion and conclusions of our work.
2 CubeSats
A CubeSat, which was developed as a collaborative effort between California Polytechnic State University and Stanford University’s Space Systems Development Laboratory in 1999 (Twiggs, 2003), is a standardized model of a miniaturized satellite with a volume of
There are several CubeSat missions planned for detection and localization of short- and long-GRBs, former of which can be associated with GW signals, using 5U (Yonetoku et al., 2014) and 6U (Racusin et al., 2017) CubeSat architectures, as well as a swarm of 3U CubeSats (Ohno et al., 2018). To localize the SGRBs accompanying the GWs, Yonetoku et al. (2014) developed Kanazawa-SAT, an X-ray imager based on a coded masked-silicon drift detector, the size of which is 100 cm2, mounted on a 5U CubeSat. The FOV of the developed X-ray detector is
3 Gamma-Ray Detectors
The most commonly used gamma-ray detectors are made of scintillator detector materials, such as thallium-doped sodium iodide (NaI(Tl)), thallium-doped cesium iodide (CsI(Tl)), and a relatively new cerium-activated lanthanum (III) bromide (LaBr3(Ce)) which provides a higher energy resolution than the previous two (Gilmore, 2008). Prices for a type of a single scintillator4 are on the order of
Among the three most common scintillator materials, LaBr3(Ce) provides the shortest decay time of 16 ns (Table 1). The decay time depends on the concentration of cerium as an activator in the LaBr3 crystal. This value is crucial as reaching high localization accuracies is correlated with high photon counting rates for a given time interval (bin). Having ultrahigh temporal resolution of gamma-ray detection will increase the photon counting rate and hence provide better counting statistics. LaBr3(Ce) has 40 and 17% higher light yield, which is defined as the efficiency in converting ionization energy to light output in the scintillation crystal, compared with NaI(Tl) and CsI(Tl), respectively. LaBr3(Ce) has an inherent radioactive impurity caused by a 0.09% unstable 138La isotope from the default lanthanum, and contamination from its homologue 227Ac (Quarati et al., 2007; Nicolini et al., 2007). However, crystal processing refinements reduced this contamination by a factor of 15 (Quarati et al., 2007). This intrinsic activity of the LaBr3(Ce) crystal is not expected to impact the ultrahigh temporal resolution, although it might increase the background counts (Quarati et al., 2007). LaBr3(Ce) also has a higher efficiency in stopping power due to its higher density (Table 1), meaning higher counts in full energy peaks.
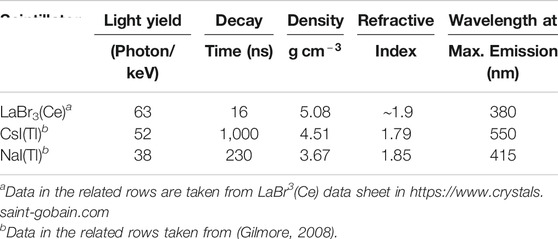
TABLE 1. Properties of most common scintillator materials for gamma-ray detection.
In addition to light yield, decay time, and density, refractive index and wavelength at maximum emission are also important features of a scintillator material for choosing the most compatible readout electronics, such as photo-multipliers. Photo-multipliers convert the output of the scintillation crystal, which is a quantity of light, into an electrical signal (Gilmore, 2008). Conventionally, this is achieved by using photomultiplier tubes. Photomultiplier tubes require high biasing voltages, and they are bulky and fragile and sensitive to magnetic fields (Cozzi et al., 2018). SiPMs, on the other hand, are relatively new technology. SiPMs are made of dense arrays of avalanche photodiodes (APDs), and they are insensitive to magnetic fields; they have high multiplication gain (
Depending on the main purpose of the gamma-ray detector, the two photo-detectors types could provide different solutions: 1) SiPMs for a higher time-resolution and 2) SDDs for higher spectral resolution (see Table 1 in (Butt et al., 2015)). Noise contribution due to the dark current in the SiPMs, which is defined as the excess leakage current of a photodiode in reverse bias in the absence of light, is a known issue. However, this issue might be overcome by using SiPMs with small surface areas as dark current scales linearly with their surface area (Bretz et al., 2018) and a coincidence readout method (Ohno et al., 2018). Another known issue is the radiation damage in SiPMs; however, the effects of low-energy photons (
In this study, we consider that the design, fit, and volume of our gamma-ray detectors, along with their passive shielding to reduce the effects of scattered gamma-rays, are planned to be in line with the previously proposed missions, such as the BurstCube (Racusin et al., 2017) and CAMELOT (Ohno et al., 2018). This will guide us to avoid exceeding the volume and weight limits and reduce the effects of gamma-ray scattering for our gamma-ray detectors that will be mounted on our planned 6U CubeSats. The effective area of our gamma-ray detectors for the energy range 50–300 keV is planned to be between 400 and 600 cm2, which could be mounted on the largest side surface (20 cm
4 Triangulation of SGRBS
Localization of the GRB sources in space is planned to be achieved by the triangulation method (Figure 1). In this method, when a bright GRB occurs in deep space, the photons coming from the source are detected by the first CubeSat (CS1) at time
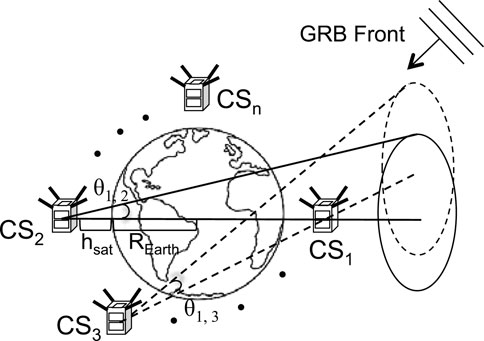
FIGURE 1. Illustration of the triangulation method using CubeSats. Each independent CubeSat pair is used to derive an annulus of location for the GRB source.
Assuming that the GRB is a planar wave, meaning that the distance to the source of the event is much larger than the distance between the two CubeSats, the direction of the GRB source can be constrained by the triangulation formula (Predoi et al., 2012; Hurley et al., 2013):
where
where
Historically, triangulation for localizations of GRBs has been performed by the interplanetary network (IPN).5 The
5 System Overview and Data Transmission Scheme
Performing a fast triangulation of GRBs with mega-constellation of CubeSats in LEO requires defining a distributed multi-hop network, given the limited access time to a CubeSat from ground. Such a constellation allows establishing various paths from the detecting CubeSats to the different ground stations of SONG. In Figure 2, we present a system overview of an example path in such network. The path consists of four CubeSats for detection and providing connectivity to a ground station of the SONG ground network. After the GRB front has been detected by a CubeSat, a transmission with descriptive data of the detected light curve event is sent across the path. Then, each CubeSat forwards the data across the network until reaching the ground station belonging to the SONG network. To reach this goal, we consider our transmission scheme in a given established physical network with 1) available energy subsystem budget, 2) radio communications payload in the satellite, 3) access scheme for communication resource (frequency and timeslot) allocation, 4) corresponding network addressing space, and 5) static routing, which we all consider fixed and operative. This ensures each data packet (referred as segment at transport) to be properly routed by a CubeSat and also acknowledged both after transmitted and once successfully received by the ground station. Given that we design our constellations for global coverage, there will always be a connection with the ground station and a path will be established to it. At the end, all the light curve events are gathered in the same facility (e.g., a control room) for data analysis, estimation, and visualization of the relative position and time of the GRB event through the triangulation method described earlier.
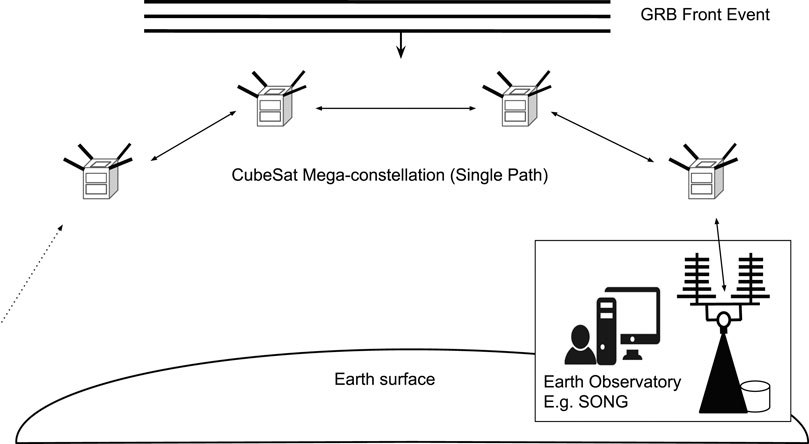
FIGURE 2. IMPACT system overview of one possible data transmission path in a CubeSat mega-constellation detecting a GRB front from above. The path consists of various detecting and data forwarding CubeSats to an Earth observatory for analysis, for example, a ground station in SONG.
Mega-constellations benefit from shorter round trip times (RTTs) between two neighboring satellites in the network. We define the RTT as the sum of times taken for 1) the propagation of the signal from a transmitting node in the network to a receiving node in a single hop and 2) the propagation of the corresponding acknowledgement signal in the opposite direction. Thus, the RTT for a 580-km LEO orbit that we consider is
In our proposed system constellation, we consider a reliable data transmission scheme for each hop from a detecting CubeSat to a ground station collocated at SONG. Data transport is based on an end-to-end protocol scheme from a networking perspective, while we consider this in each single possible detection path. However, for our timing analysis, we consider the longest possible time delay occurring when a detection data packet transmission goes through the longest path in the constellation, since all other paths will incur in smaller delays and, thus, will be upper bounded by the delay of the longest path over several hops.
Multi-hop networks, however, might experience segment loss, which in turn affects the performance of the end-to-end protocol scheme (Sundararajan et al., 2011), increasing the total delay, which is critical in our case. A hop-by-hop version of the reliable datagram protocol (RDP) (Velten et al., 1984) is utilized in these types of networks and could reduce this loss. However, RDP establishes a handshake at each hop-pair which will add further time delays. To minimize the data segment loss rates and the RTT at each hop in the mega-constellation, we use random linear network coding (RLNC) (Ho et al., 2006) at the transport layer, which allows the data segments to be reliably transmitted, despite segment losses (Hernández Marcano and Jacobsen, 2019). This represents the case of FEC in terms of an erasure correcting code at the transport layer. Using RLNC avoids encoding and decoding at each immediate hop, in contrast to the other rate-based or rate-less block codes at the transport layer (Kim et al., 2012). With RLNC, segments are acknowledged as a set on a hop basis removing the caveats of RDP. In this way, RLNC can be regarded as a reliable version of the user datagram protocol (UDP) (Postel, 1980), but without a flow or congestion control mechanism. All these benefits allow RLNC to achieve a lower latency than RDP, which is critical to fetch event reports for analysis.
RLNC achieves these benefits by splitting the transmitted data into blocks of equal size called generations, where each consists of g segments. In each block, coded segments are created as linear combinations of the segments within that block, where the multiplying coding coefficients are drawn from a Galois field (GF) of size q. In RLNC, it is possible to generate recoded segments by recoding previously received coded segments. This process is called coding online or on-the-fly, where decoding coded segments prior to forwarding them to the next hop is not necessary (Sundararajan et al., 2008). To decode a generation, only a linearly independent set of coded segments is necessary and sufficient to recover the original segments. Any coded segment gets appended to its header, a total amount of bits equal to
An example of coping with segment losses with RLNC as FEC is shown in Figure 3. The vertical lines represent increasing time from top to bottom. At the beginning of the transmission, the leftmost CubeSat starts transmitting coded segments that can be received (solid arrow in Figure 3) or lost (solid with cross in Figure 3). Segments are sent continuously until enough linearly independent segments are received, and an acknowledgement is transmitted back for the sending to stop (dashed line). The middle CubeSat starts transmitting toward the CubeSat on the right as soon as segments are received from the previous hop if they are linearly independent. This process is repeated across all hops until the whole message is received at a ground station to decode the data. This is in contrast with any other type of necessary FEC, where all segments would have to be decoded in each hop before being coded and sent to the next introducing more delays.
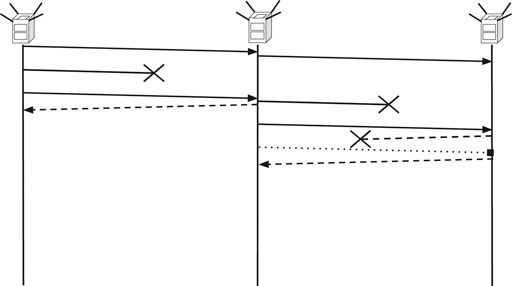
FIGURE 3. Illustration of the RLNC for the case of two segments and two hops. The vertical lines represent increasing time from top to bottom, and we assume a high field size for the sake of simplicity. The solid arrows represent coded segments, whereas the dashed arrows represent acknowledgements.
6 Constellation Design
To detect and localize SGRBs with high accuracy, we consider using a total number of
where
where ϕ is the latitude at which a series of aligned satellites from different planes are located. The distance between a satellite and the ground station, to which the data will be transmitted, is given as follows (Ekici et al., 2001):
where
7 Analyses and Results
7.1 Number of CubeSats and Accuracy
In this study, we aim to calculate a number of 6U CubeSats to achieve high-accuracy localization so that SGRBs afterglows can be observed by SONG. The desired localization accuracy for the SGRBs must be much smaller than
Each CubeSat in a mega-constellation is equipped with gamma-ray detectors for the proposed energy range between 50 and 300 keV, in compliance with the energy range of the nominal BATSE onboard burst trigger (Fishman et al., 1989).
The accuracy of the detection timing of an SGRB is correlated with the total number of photons counted during its duration. Considering that the median photon fluxes in 50–300 keV energy range for the SGRBs are ∼2 photon cm−2 s−1 (von Kienlin et al., 2020), the effective surface area of the gamma-ray detectors for this energy range must be between 400 and 600 cm2, corresponding to the side surface of a 6U CubeSat architecture (20 cm
When an increase in photon counting rates per time bin exceeds 5σ threshold above background, it will be accepted as an SGRB trigger.
The average number of triggers per year is estimated based on the integral distribution of SGRB fluence in the energy range 50–300 keV [the bottom panel of Figure 10 in von Kienlin et al., 2020]. We calculate the average energy fluence by
where
The gamma-ray detectors will have time resolutions in the order of μs, which is linked to the readout electronics, to time stamp every photon with its precise arrival time. Higher resolution in time will lead to higher counting rates when time-binning the data leading to reduction of uncertainties in calculated time lags based on cross-correlation.
We take into account only the statistical error related to δt and neglect uncertainties in distances between each pair of CubeSats, as the main contribution comes from the timing uncertainties (Predoi et al., 2012).
All of the CubeSats in the mega-constellation must be time-synchronized and their position must be known precisely, which can be achieved with the GPS technology. It was shown that synchronizing a GPS with a CsI scintillation crystal gamma-ray detector and SiPM as a photo-detector is possible, and this setup can provide GPS time stamping of the incoming gamma-ray photons with accuracy and precision better than
The average localization accuracy for the first-order approximation can therefore be written as
where
Using Eq. 7, we calculated the position accuracies that can be achieved with a given number of satellites, which ranges from 3 to 100 (
The results show that position accuracies larger than 1∘ can be achieved with less than 25 CubeSats (1σ uncertainty from (Hurley et al., 2013)), with an average delay accuracy longer than 1 ms (left panel of Figure 4). Reaching accuracies of
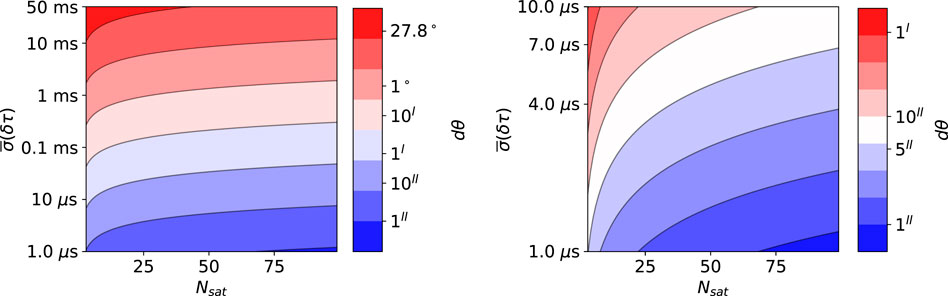
FIGURE 4. Left panel shows the relationship among mean uncertainty in the time delay of the satellites (log-scale) for the range between 1 μs and 50 ms, mean uncertainty in position accuracy (log-scale), and average number of satellites. The right panel shows the same relationship for mean uncertainty in the time delay among the satellites between 1 and 10 μs. The accuracies are calculated using Eq. 7.
The numbers calculated for the CubeSats in a mega-constellation to achieve high-accuracy localization must also be multiplied by 2 as the half of the CubeSats in the constellation is expected to be in Earth’s shadow for a uniformly distributed constellation. This results in
7.2 Communication Time Delay in Data Transmission
Given the need for reaching a low latency in conveying event reports, we compute the communication time delay of our scenario. The delay for a transmission with acknowledgement during connection for a single path in K number of hops in the network depends on the following:
We consider a software-configurable binning time of 5 ms for a data point of photon collection and total photon count reporting from readout electronics (Rau et al., 2005). We consider that the light curve of an SGRB extends from 5 s before SGRB peak time to 5 s after it, considering the average SGRB burst duration of 0.2 s (von Kienlin et al., 2020).
The data point byte representation of a measurement, as shown in Table 2, since it will impact on the data segment size. To convey a measurement, we require a time stamp with nanosecond temporal resolution (8 bytes), photon count value (2 bytes), latitude in degrees (4 bytes), longitude in degrees (4 bytes), orbit height in km (2 bytes), and spare bytes, in case needed (5 bytes). Thus, a total of 25 bytes are required to represent a single measurement as a data point.
Based on the previous, we expect to send 2000 data points for the whole curve equivalent to 50 KB of data for a curve. Therefore, if two data points are sent per data segment, 1,000 segments are required, and for six data points, at least 340 segments are needed. Smaller binning times are possible leading to a larger number of segments. Therefore, we also consider a larger number of segments in our results. Therefore, data segment sizes
The maximum number of satellites to transverse in this type of constellation, which coincides with the maximum number of hops, is
The transmission time costs for data and acknowledgements, which are
Constant propagation time from forward and return paths,
For each link, we consider working in regime known as propagation dominated, where the bit rate R is larger than a threshold given by
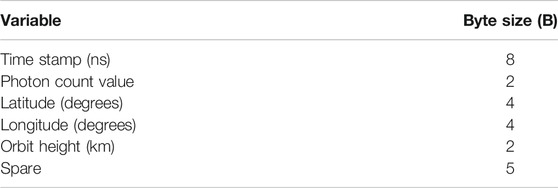
TABLE 2. Data point representation.
The delay for a transmission with acknowledgement during connection also depends on buffer queueing and internal device processing. However, we did not include these two processes as they are negligible compared to the delays stemming from propagation and transmission processes for small embedded devices (Paramanathan et al., 2014; Hernandez Marcano et al., 2016).
Hence, we calculate the total mean communication delay, which includes both the cost rates for data transmission and the acknowledgements for propagation dominated, separately, based on the following:
where
where
We first study the relationship between the total delay and number of segments for data segment sizes of 50 and 150 bytes, and GF sizes of
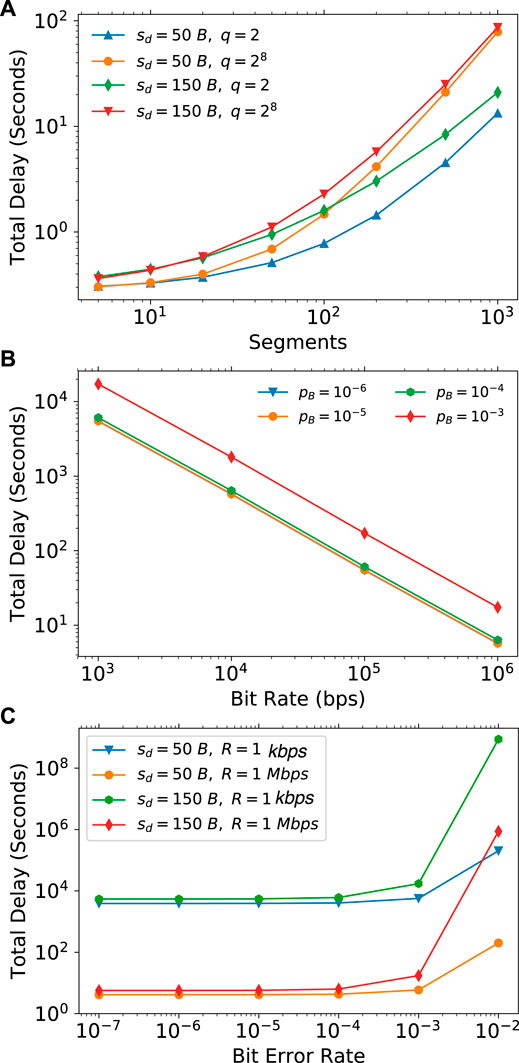
FIGURE 5. Relationship between the total delay and (A) the number of segments for data segment sizes of 50 and 150 bytes, and GF sizes of
The results show that the total communication delay increases as the number of segments increases for all data segments and GF sizes. Given our current assumptions, for bin sizes as 5 ms, a readout in the order of
Similar to the relationship between total delay and the number of segments, we use four orbital planes accommodating 10 CubeSats in each plane to study the relationship between the bit rates and total delay. Here, we assume that the data segment size is
We also calculate the total communication delay for BERs ranging from 10−7 to 10−2 for the same constellation configuration as in previous calculations. However, this time, we consider four scenarios where the data segment sizes are 50 and 150 bytes, and the bit rates are 1 kbps and 1 Mbps (Figure 5C). The results show that smaller bit rates (1 kbps) cause almost 1,000 times longer total delays than the larger bit rates (1 Mbps), regardless of the data segment size. For the bit rate of 1 kbps, larger data segments result in
We compute the total time delay given by the sum Eqs 8 and 9, extending from the detection of an SGRB to reception of this signal by a ground station, for a number of satellites in a mega-constellation of CubeSats, IMPACT. To achieve this, we chose best- and worst-case scenarios. For the best-case scenario, we assumed the elevation angle is 90∘, data segment size is
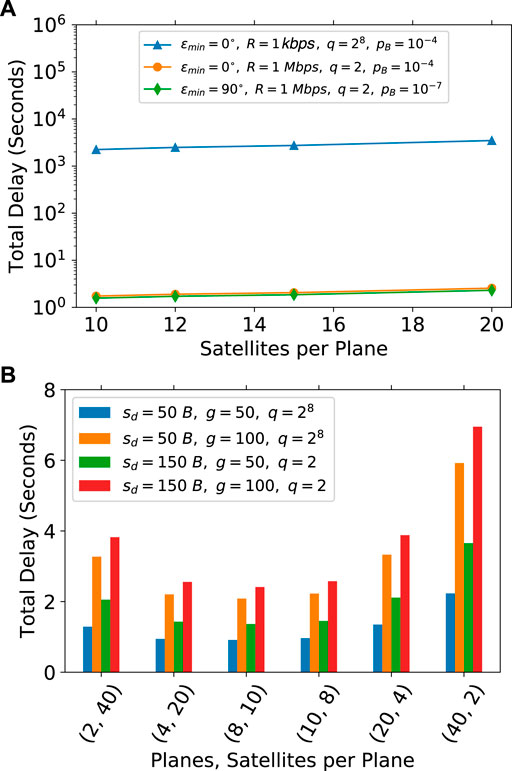
FIGURE 6. Top panel shows the relationship between the total delay and number of satellites for four planes, where 100 segments are transmitted. The bottom panel shows the interplay between the number of planes and CubeSats per plane for a total number of 80 CubeSats.
Finally, we investigate on the ideal constellation design parameters for this use case, particularly the number of planes and satellites per plane. To achieve this, we keep fixed the total number of satellites to
8 Discussion and Conclusions
After the detection of the GW signals in 2015 (Abbott et al., 2016b), and the later detection of a short gamma-ray burst by the Fermi telescope in 2017 after GW from an NS-NS binary (Abbott et al., 2017b), these evidences for the association of SGRBs with GWs started the era of GW astronomy. Therefore, the prompt localization of these phenomena will allow ground- and space-based observatories to observe and analyze faster source afterglows that will provide insights into astrophysics, dense matter, gravitation, and cosmology (Abbott et al., 2017b).
In this study, we calculate the number of CubeSats in a mega-constellation to achieve localization accuracies between around
In triangulation-based localizations, uncertainties in the time delays between each pair of CubeSats are the major contributors for accuracies in localization calculations. This introduces constraints on the selection of gamma-ray detector materials and their readout electronics. The most promising gamma-ray detectors, which can provide minimum uncertainties in time information, are LaBr3(Ce) scintillators. These provide the shortest decay time of 16 ns (Table 1) as well as 40% and 17% higher light yields than NaI(Tl) and CsI(Tl) crystals, respectively. A good choice for readout electronics to LaBr3(Ce) can be SiPMs, as they are not sensitive to magnetic fields; they have high multiplication gain (
We calculated that for a first-order approximation, the number of CubeSats in a mega-constellation is
Additionally, we calculated the total time delay between the reception of the SGRB signal by the CubeSats and reception of the information by a ground station. A mega-constellation of CubeSats in the LEO is a multi-hop network, where we studied various communication aspects as the bit rate, BER, segment size, and erasure correcting code to reduce the delay. To achieve the maximum SGRB localization accuracies between around
The BATSE detectors on the Compton Gamma-Ray Observatory calculated coordinates with an accuracy of
In conclusion, an interconnected multi-hop array of CubeSats for transients, IMPACT, will enable us to detect, localize, and study the SGRBs as counterparts to GWs in an energy range from 50 to 300 keV. IMPACT is planned to consist maximum 80 CubeSats, which are synchronized with an onboard GPS. These CubeSats are planned to be distributed in eight orbital planes, each of which accommodating 10 CubeSats that carry LaBr3(Ce) scintillation crystals coupled with SiMPs as gamma-ray detectors. Our calculations suggest that IMPACT will be able to provide localization accuracies between 10 arcminutes and 1∘, which requires uncertainties in average time delays in the order of a few milliseconds with 80 CubeSats. This orbital architecture will also provide an all sky coverage (the field of view is 4π steradians). Additionally, the time it takes for IMPACT to detect an SGRB and downlink the required information for localization to a ground station is expected to be around 5 s.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Author Contributions
All authors collaborated in the motivation, conceptual design, methodology, results analysis and conclusions. FI reviewed the State-of-the-Art, SGRB scientific missions, CubeSats missions, detector payload evaluation, trilateration, number of CubeSats calculation, corresponding plotting and results. NH provided the communication payload State-of-the-Art, constellation, communication and erasure code delay evaluation, corresponding plotting and results. FI and NH discussed the results and conclusions with RJ and CK. FI and NH wrote the paper, where RJ and CK contributed on the manuscript providing significant observations to the study, results and conclusions.
Funding
This work was funded by Innovation Fund Denmark as part of the MegaMan project (J. nr. 7049-00003B).
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Footnotes
1Saint Louis University CubeSat database: https://sites.google.com/a/slu.edu/swartwout/home/cubesat-database#refs
2Erik Kulu. Nanosats EU: http://nanosats.eu/
3Erik Kulu. Newspace Index: https://www.newspace.im/
4Saint Gobain Crystals: https://www.crystals.saint-gobain.com/products/standard-and-enhanced-lanthanum-bromide
5https://heasarc.gsfc.nasa.gov/docs/heasarc/missions/ipn.html
6http://www.ssl.berkeley.edu/ipn3/index.html
7https://sci.esa.int/web/bepicolombo
8https://gomspace.com/shop/subsystems/communication-(1)/default.aspx
9http://www.amsatuk.me.uk/iaru/spreadsheet.htm
10https://swift.nasa.gov/proposals/tech_appd/swiftta_v14.pdf
11https://fermi.gsfc.nasa.gov/science/parameters.html
References
Abbott, B. P., Abbott, R., Abbott, T. D., Abernathy, M. R., Acernese, F., Ackley, K., et al. (2016a). Localization and broadband follow-up of the gravitational-wave transient GW150914. Astrophys. J. Lett. 826, L13. doi:10.3847/2041-8205/826/1/L13
Abbott, B. P., Abbott, R., Abbott, T. D., Abernathy, M. R., Acernese, F., Ackley, K., et al. (2016b). Observation of gravitational waves from a binary black hole merger. Phys. Rev. Lett. 116, 061102. doi:10.1103/PhysRevLett.116.061102
Abbott, B. P., Abbott, R., Abbott, T. D., Abernathy, M. R., Acernese, F., Ackley, K., et al. (2016c). Properties of the binary black hole merger GW150914. Phys. Rev. Lett. 116, 241102. doi:10.1103/PhysRevLett.116.241102
Abbott, B. P., Abbott, R., Abbott, T. D., Acernese, F., Ackley, K., Adams, C., et al. (2017a). GW170814: a three-detector observation of gravitational waves from a binary black hole coalescence. Phys. Rev. Lett. 119, 141101. doi:10.1103/PhysRevLett.119.141101
Abbott, B. P., Abbott, R., Abbott, T. D., Acernese, F., Ackley, K., Adams, C., et al. (2017b). GW170817: observation of gravitational waves from a binary neutron star inspiral. Phys. Rev. Lett. 119, 161101. doi:10.1103/PhysRevLett.119.161101
Abdalla, H., Adam, R., Aharonian, F., Ait Benkhali, F., Angüner, E. O., Arakawa, M., et al. (2019). A very-high-energy component deep in the γ-ray burst afterglow. Nature 575, 464–467. doi:10.1038/s41586-019-1743-9
Acciari, V. A., Ansoldi, S., Antonelli, L. A., Arbet Engels, A., Baack, D., Babić, A., et al. (2019a). Teraelectronvolt emission from the γ-ray burst GRB 190114C. Nature 575, 455–458. doi:10.1038/s41586-019-1750-x
Acciari, V. A., Ansoldi, S., Antonelli, L. A., Engels, A. A., Baack, D., Babić, A., et al. (2019b). Observation of inverse Compton emission from a long γ-ray burst. Nature 575, 459–463. doi:10.1038/s41586-019-1754-6
Ahlswede, R., Cai, N., Li, S.-Y., and Yeung, R. W. (2000). Network information flow. IEEE Trans. 46, 1204–1216. doi:10.1109/18.850663
Ajello, M., Arimoto, M., Axelsson, M., Baldini, L., Barbiellini, G., Bastieri, D., et al. (2019). A decade of gamma-ray bursts observed by fermi-LAT: the second GRB catalog. Astrophys. J. 878, 52. doi:10.3847/1538-4357/ab1d4e
Anderson, M., Hirschmann, E. W., Lehner, L., Liebling, S. L., Motl, P. M., Neilsen, D., et al. (2008). Magnetized neutron-star mergers and gravitational-wave signals. Phys. Rev. Lett. 100, 191101. doi:10.1103/PhysRevLett.100.191101
Aptekar, R. L., Frederiks, D. D., Golenetskii, S. V., Ilynskii, V. N., Mazets, E. P., Panov, V. N., et al. (1995). Konus-W gamma-ray burst experiment for the GGS wind spacecraft. Space Sci. Rev. 71, 265–272. doi:10.1007/BF00751332
Barthelmy, S. D., Cline, T. L., Gehrels, N., Bialas, T. G., Robbins, M. A., Kuyper, J. R., et al. (1994). Bacodine the real‐time batse gamma-ray burst coordinates distribution network. AIP Conf. Proc. 307, 643–647. doi:10.1063/1.45819
Berger, E. (2014). Short-duration gamma-ray bursts. Annu. Rev. Astron. Astrophys. 52, 43–105. doi:10.1146/annurev-astro-081913-035926
Bretz, T., Engel, R., Hebbeker, T., Kemp, J., Middendorf, L., Peters, C., et al. (2018). An integrated general purpose SiPM based optical module with a high dynamic range. J. Instrum. 13, P06001. doi:10.1088/1748-0221/13/06/P06001
Butt, A. D., Donati, S., Cozzi, G., Busca, P., Fiorini, C., Piemonte, C., et al. (2015). “Comparison of sipm and sdd based readouts of 1? labr3:ce scintillator for nuclear physics applications,” in 2015 IEEE nuclear science symposium and medical imaging conference (NSS/MIC), San Diego, CA, October 31–November 7, 2015 (IEEE), 1–4.
Connaughton, V., Burns, E., Goldstein, A., Blackburn, L., Briggs, M. S., Zhang, B.-B., et al. (2016). Fermi GBM observations of LIGO gravitational-wave event GW150914. Astrophys. J. Lett. 826, L6. doi:10.3847/2041-8205/826/1/L6
Cozzi, G., Busca, P., Carminati, M., Fiorini, C., Montagnani, G. L., Acerbi, F., et al. (2018). High-resolution gamma-ray spectroscopy with a SiPM-based detection module for 1” and 2” LaBr3:Ce readout. IEEE Trans. Nucl. Sci. 65, 645–655. doi:10.1109/TNS.2017.2784238
D’Avanzo, P. (2015). Short gamma-ray bursts: a review. J. High Energ. Astrophy. 7, 73–80. doi:10.1016/j.jheap.2015.07.002
Dikaliotis, T. K., Dimakis, A. G., Ho, T., and Effros, M. (2014). On the delay advantage of coding in packet erasure networks. IEEE Trans. Inf. Theor. 60, 2868–2883. doi:10.1109/TIT.2014.2306817
Ekici, E., Akyildiz, I. F., and Bender, M. D. (2001). A distributed routing algorithm for datagram traffic in leo satelitte networks. IEEE/ACM Trans. Netw. 9, 137–147. doi:10.1109/90.917071
Fishman, G. J., Meegan, C. A., Wilson, R. B., Parnell, T. A., Paciesas, W. S., Pendleton, G. N., et al. (1989). “The BATSE experiment on the Gamma Ray Observatory: solar flare hard X ray and gamma-ray capabilities,” in Max’ 91 Workshop 2: developments in observations and theory for solar cycle 22. Editors Winglee, R. M., and Dennis, B. R.
Gallager, R. (1962). Low-density parity-check codes. IEEE Trans. Inf. Theor. 8, 21–28. doi:10.1109/TIT.1962.1057683
Gehrels, N., Chincarini, G., Giommi, P., Mason, K. O., Nousek, J. A., Wells, A. A., et al. (2004). TheSwiftGamma-ray burst mission. Astrophys. J. 611, 1005–1020. doi:10.1086/422091
Gilmore, G. R. (2008). Practical gamma-ray spectrometry. 2nd Edn. Weinheim, Germany: Wiley-VCH Verlag.
Hamming, R. W. (1950). Error detecting and error correcting codes. Bell Syst. Tech. 29, 147–160. doi:10.1002/j.1538-7305.1950.tb00463.x
Heide, J., Pedersen, M. V., Fitzek, F. H. P., and Medard, M. (2011). “On code parameters and coding vector representation for practical RLNC,” in 2011 IEEE International Conference on Communications (ICC), Kyoto, Japan, June 5–9, 2011, (IEEE), 1–5.
Hernández Marcano, N. J., and Jacobsen, R. H. (2019). “On the delay advantages of a network coded transport layer in iot nanosatellite constellations,”in ICC 2019 - 2019 IEEE International Conference on Communications (ICC), Shanghai, China, May 20–24, 2019, (IEEE).
Hernandez Marcano, N. J., Sørensen, C. W., Guerrero, J. A. C., Wunderlich, S., Lucani Rötter, D., et al. (2016). On goodput and energy measurements of network coding schemes in the raspberry pi. J. Electronics 5 (4), 66. doi:10.3390/electronics5040066
Ho, T., Médard, M., Koetter, R., Karger, D. R., Effros, M., Shi, J., et al. (2006). A random linear network coding approach to multicast. IEEE Trans. Inf. Theory 52, 4413–4430. doi:10.1109/tit.2006.881746
Hurley, K., Mitrofanov, I., Kozyrev, A., Litvak, M., Grinkov, A. S. V., Charyshnikov, S., et al. (2006). Mars Odyssey joins the third interplanetary network. Astrophys. J. Suppl. 164, 124–129. doi:10.1086/501352
Hurley, K., Pal’shin, V. D., Aptekar, R. L., Golenetskii, S. V., Frederiks, D. D., Mazets, E. P., et al. (2013). The interplanetary network supplement to the Fermi GBM catalog of cosmic gamma-ray bursts. Astrophys. J. Supp. 207, 39. doi:10.1088/0067-0049/207/2/39
Hurley, K. (2001). “Some recent, interesting observations of gamma-ray bursts,” in Gamma-ray bursts in the afterglow era. Editors Costa, E., Frontera, F., and Hjorth, J. (Berlin, Heidelberg: Springer Berlin Heidelberg), 3–8
Jenkins, D. (2015). Novel scintillators and silicon photomultipliers for nuclear physics and applications. J. Phy.Conf. Ser. 620, 1–7. doi:10.1088/1742-6596/620/1/012001
Kim, M., Cloud, J., ParandehGheibi, A., Urbina, L., Fouli, K., Leith, D., et al. (2012). Network coded TCP (CTCP). arXiv e-prints.
Kuznetsov, S., Kudela, K., Ryumin, S., and Gotselyuk, Y. (2002). Coronas-f satellite: tasks for study of particle acceleration. Adv. Space Res. 30, 1857–1863. doi:10.1016/s0273-1177(02)00462-3
Meegan, C., Lichti, G., Bhat, P. N., Bissaldi, E., Briggs, M. S., Connaughton, V., et al. (2009). The fermi gamma-ray burst monitor. Astrophys. J. 702, 791–804. doi:10.1088/0004-637x/702/1/791
Mitchell, L. J., Phlips, B., Johnson, W. N., Johnson-Rambert, M., Kansky, A. N., and Woolf, R. (2020). Radiation damage assessment of sensl sipms. arXiv e-prints
Nicolini, R., Camera, F., Blasi, N., Brambilla, S., Bassini, R., Boiano, C., et al. (2007). Investigation of the properties of a 1”x1” LaBr3:Ce scintillator. Nucl. Instrum. Methods Phys. Res. 582, 554–561. doi:10.1016/j.nima.2007.08.221
Ohno, M., Werner, N., Pál, A., Řípa, J., Galgóczi, G., Tarcai, N., et al. (2018). “CAMELOT: design and performance verification of the detector concept and localization capability,” in Proceedings of the SPIE Astronomical Instrumentation Space Telescopes and Instrumentation 2018: Ultraviolet to Gamma Ray, (SPIE Proceedings), 10699, 1466–1477.
Oltrogge, D., and Leveque, K. (2011). “An evaluation of cubesat orbital decay,” in Proceedings of the 25th annual American Institute of Aeronautics and astronautics/Utah state university Conference on small satellites
Pál, A., Mészáros, L., Tarcai, N., Werner, N., Řípa, J., Ohno, M., et al. (2018). Camelot - concept study and early results for onboard data processing and GPS-based timestamping. arXiv.
Paramanathan, A., Pahlevani, P., Thorsteinsson, S., Hundeboll, M., Lucani, D. E., and Fitzek, F. H. P. (2014). “Sharing the pi: testbed description and performance evaluation of network coding on the raspberry pi,” in 2014 IEEE 79th vehicular technology conference (VTC Spring), Seoul, South Korea, May 18–21, 2014, (IEEE), 1–5.
Phinney, E. S. (1991). The rate of neutron star binary mergers in the universe - minimal predictions for gravity wave detectors. Astrophys. J. Lett. 380, L17–L21. doi:10.1086/186163
Predoi, V., and Hurley, K. (2012). Search for gravitational waves associated with the InterPlanetary Network short gamma ray bursts. J. Phys. Conf. Series. 363,012034. doi:10.1088/1742-6596/363/1/012034
Quarati, F., Bos, A. J. J., Brandenburg, S., Dathy, C., Dorenbos, P., Kraft, S., et al. (2007). X-ray and gamma-ray response of a 2”x2” LaBr3:Ce scintillation detector. Nucl. Instrum. Methods Phys. Res. 574, 115–120. doi:10.1016/j.nima.2007.01.161
Racusin, J., Perkins, J. S., Briggs, M. S., Georgia, D. N., John, K., Valerie, C., et al. (2017). BurstCube: a CubeSat for gravitational wave counterparts. in Proceedings of the 227th meeting of the American Astronomical Society, 147.26
Rau, A., Kienlin, A. V., Hurley, K., and Lichti, G. G. (2005). The 1st INTEGRAL SPI-ACS gamma-ray burst catalogue. Astron. Astrophys. 438, 1175–1183. doi:10.1051/0004-6361:20053159
Reed, I., and Solomon, G. (1960). Polynomial codes over certain finite fields. J. Soc. Ind. Appl. Math. 8, 300–304. doi:10.1137/0108018
Shahmoradi, A., and Nemiroff, R. J. (2015). Short versus long gamma-ray bursts: a comprehensive study of energetics and prompt gamma-ray correlations. Mon. Not. Roy. Astron. Soc. 451, 126–143. doi:10.1093/mnras/stv714
Shokrollahi, A. (2006). Raptor codes. IEEE Trans. Inf. Theor. 52, 2551–2567. doi:10.1109/TIT.2006.874390
Sundararajan, J. K., Shah, D., and Medard, M. (2008). “Arq for network coding,” in 2008 IEEE international symposium on information theory, Toronto, ON, Canada, July 6–11, 2008, (IEEE), 1651–1655.
Sundararajan, J. K., Shah, D., Medard, M., Jakubczak, S., Mitzenmacher, M., and Barros, J. (2011). Network coding meets tcp: theory and implementation. Proc. IEEE 99, 490–512. doi:10.1109/JPROC.2010.2093850
Twiggs, R. (2003). “The next generation of innovative space engineers: university students are now getting a taste of space experience building, launching and operating their own space experiments with low-cost picosatellites,” in Proceedings of the 5th ESA international conference on spacecraft guidance, navigation and control systems,(ESA Special Publication), Vol. 516, 409.
Velten, D., Hinden, R., and Sax, J. (1984). “Reliable data protocol. RFC 908, RFC,” in ARPANET Working Group Requests for Comments. Menlo Park, California: SRI International, 908
von Kienlin, A., Meegan, C. A., Paciesas, W. S., Bhat, P. N., Bissaldi, E., Briggs, M. S., et al. (2020). The fourth fermi-GBM gamma-ray burst catalog: a decade of data. The Astrophysics Journal 893, 46. doi:10.3847/1538-4357/ab7a18
Walker, J. G. (1971). Some circular orbit patterns providing continuous whole earth coverage. J. Br. Interplanet. Soc. (JBIS) 24, 369–384
Yang, Q., Laurenson, D. I., and Barria, J. A. (2012). On the use of leo satellite constellation for active network management in power distribution networks. IEEE Trans. Smart Grid 3, 1371–1381. doi:10.1109/TSG.2012.2197644
Keywords: multilateration, short gamma-ray bursts, CubeSat, constellation, communication, TDoA
Citation: Inceoglu F, Hernández Marcano NJ, Jacobsen RH and Karoff C (2020) A General Overview for Localizing Short Gamma-Ray Bursts with a CubeSat Mega-Constellation. Front. Astron. Space Sci. 7:573060. doi: 10.3389/fspas.2020.573060
Received: 15 June 2020; Accepted: 31 August 2020;
Published: 12 November 2020.
Edited by:
Elena Orlando, Stanford University, United StatesReviewed by:
Judith Racusin, National Aeronautics and Space Administration, United StatesMaria Dainotti, Jagiellonian University, Poland
Niccolo' Di Lalla, Stanford University, United States
Copyright © 2020 Inceoglu, Hernández Marcano, Jacobsen and Karoff. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Néstor J. Hernández Marcano, bmhAZW5nLmF1LmRr