 Jinke Yang1,2
Jinke Yang1,2 Yong Xie1Yidi Fan3Pengcheng Wang2,3,4Xue Wang1Zhao Cui1Jianjun Jia1,2
Yong Xie1Yidi Fan3Pengcheng Wang2,3,4Xue Wang1Zhao Cui1Jianjun Jia1,2 Yucheng Tang1*
Yucheng Tang1* Yun Kau Lau3*
Yun Kau Lau3*- 1Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai, China
- 2University of Chinese Academy of Sciences, Beijing, China
- 3Key Laboratory for Satellite Digitalization Technology, Chinese Academy of Sciences, Shanghai, China
- 4Innovation Academy for Microsatellites, Chinese Academy of Sciences, Shanghai, China
Introduction: Establishing stable laser links in triangular spacecraft constellations for gravitational wave detection is challenging due to large initial pointing uncertainties and the limitations of conventional acquisition schemes.
Methods: We propose an alternative acquisition scheme that replaces the wide-field CCD camera with an adaptive extended Kalman filter (AEKF) integrated into the point-ahead angle mechanism (PAAM). The scheme employs a quadrant photodetector (QPD) based on differential power sensing (DPS), which provides a higher dynamic range than differential wavefront sensing (DWS).
Results: By integrating coarse and fine acquisition into a single control loop, the payload structure of the acquisition, tracking, and pointing (ATP) system is simplified. Numerical simulations using a colored measurement noise model, representative of on-orbit conditions, show that the AEKF effectively predicts the point-ahead angle (PAA) and significantly reduces the initial uncertainty region, even under worst-case spacecraft navigation errors.
Discussion: The proposed scheme avoids CCD-induced heating issues, enhances robustness against navigation errors, and offers a simplified yet efficient approach for deep-space laser link acquisition in gravitational wave detection missions.
1 Introduction
In the detection of gravitational waves in space, a triangular constellation of SCs with laser links among them serves as a laser interferometer to detect the picometer-scale miniature change in armlength between two SCs generated by variation in the spacetime curvature of a gravitational wave sources (Luo et al., 2020; Danzmann and Team, 1996; Luo et al., 2016). In the initial phase of the mission, laser link acquisition is required for SCs of millions of kilometers away from each other before the scientific phase of the mission employing laser interferometry can take place.
In the conventional strategy (Cirillo and Gath, 2009; Hu et al., 2024; Gao et al., 2021b), a key payload is the CCD camera with a wide field angle, which serves to narrow the angle of the uncertainty cone from
Current research on space-based gravitational wave detection has focused mainly on simulation and preliminary verification of link acquisition schemes. Cirillo designed Kalman-filter-based controllers for the LISA acquisition phase and demonstrated their effectiveness through simulations (Cirillo and Gath, 2009). For the Taiji program, Gao developed a ground-based acquisition and pointing testbed to verify methodological feasibility (Gao et al., 2021a, Luo et al., 2017). In addition, Hu designed a device to emulate inter-satellite laser beam propagation and experimentally validated a bidirectional link acquisition scheme using an acquisition camera and the QPD based on the DWS technology (Hu et al., 2024). At present, no research has explored using orbit determination information to assist in the establishment of inter-satellite optical laser links in space-based gravitational wave detection. The aim of the present work is to look into the feasibility of replacing the CCD camera by the PAAM with an AEKF based on precision orbit determination in deep space incorporated into it. In the scientific phase, the PAAM serves to steer a laser beam to compensate for the angle generated by the relative motion between two SCs during the time it takes (around 10 s) for a laser beam to travel from a SC to a distant one. It also plays a role in compensating for the breathing angle at the annual level due to solar gravity (Yang et al., 2024; Hechenblaikner et al., 2023). In this work, we will try to understand the possible role PAAM can play even at the stage of laser link acquisition, with the aid of an AEKF. This will avoid the heating problem generated by a CCD camera and simplify the payload structure of SC.
The structure of this paper is organized as follows. Some background materials concerning ATP and scanning strategy are introduced in Sections 2, 3, respectively. We begin to enter the core of our work in Section 4, presenting the AEKF model with colored noise, the ATP control loop, and the noise model. Section 5 presents the simulation results and conducts an in-depth analysis of the scanning time results obtained from AEKF. In the final section, some remarks that look to the future of this work are made to conclude our work.
2 Payload structure of the laser link acquisition for inter-satellite laser interferometry
Figure 1 illustrates the new schematic of inter-satellite laser-ranging interferometry in our plan. In this section, we will describe the payload structure for the laser link acquisition. Apart from the PAAM and DPS angle measurement based on QPD that replaces a CCD camera, the two schemes share several payloads in common. In what follows, we shall first describe the common payloads before we go into the detailed structure of the PAAM, and the AEKF system model will also be introduced in this section.
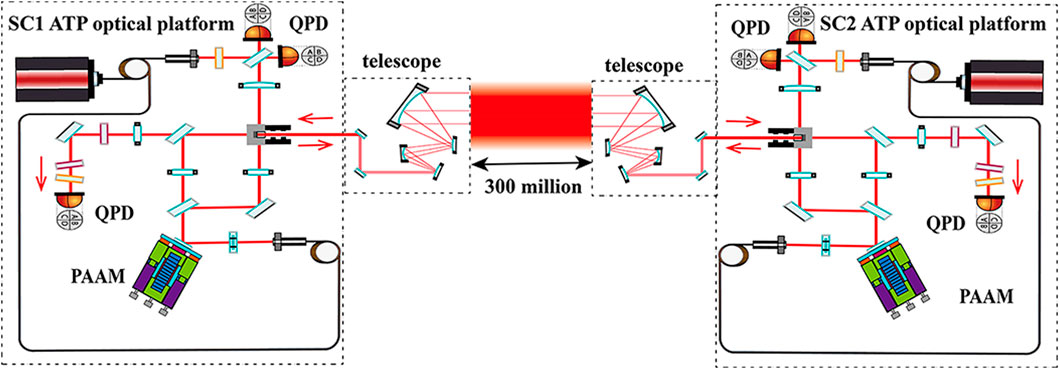
Figure 1. New schematic drawing of the laser ranging interferometry.
2.1 ATP optical bench design and process overview
Once a SC reaches its targeted position, precision orbit determination by the Deep Space Network (DSN) gives an initial position with a certain error margin. Due to launch-induced vibrations, the lasers on the two SCs initially exhibit a frequency difference in the GHz range. To mitigate this, each SC’s laser undergoes pre-stabilization, achieving a frequency stability of
After coupling into the fiber collimator, the laser is split in a 1:99 ratio. The telescope reflects
For the receiving SC, the incoming laser beam from the transmitting SC passes through the telescope and is clipped by an aperture stop at the receiving aperture. After passing through a beam splitter (BS), it is divided into two parts. One portion is focused onto the acquisition QPD by an optical lens, while the other portion passes through a dual-lens imaging system and then interferes with the local SC’s laser on the fine-tracking QPD. The received optical power is extremely low (100 pW), making the signal-to-noise ratio a major challenge. To address this challenge, a dedicated acquisition QPD hardware design is proposed, which enhances front-end amplification and reduces quadrant noise, thereby improving readout sensitivity and overall SNR. An optical phase-locked loop (OPLL) locks the phase between the transmitting and receiving SC lasers.
2.2 The star tracker (STR)
The STR is a key component in SC’s attitude determination system. It provides high-precision attitude information by detecting and identifying stars in its field of view (FOV). Based on the in-orbit experience of the BeiDou system, the readout noise of the STR currently is at the order of
2.3 The role of the telescope on the acquisition phase
The optical aperture is the primary metric for evaluating a telescope’s light-gathering capability. A larger telescope aperture allows for a greater light flux, which in turn results in higher received energy. However, since the interferometric arm length is on the order of 3 million kilometers, increasing the optical aperture alone has a minimal effect on improving the received energy but would significantly increase manufacturing challenges. Drawing on the optical aperture configurations of similar telescopes in the BeiDou system, the ATP system employs an off-axis four-mirror structure telescope with an aperture of 200 mm (Yu et al., 2024). During the capture phase, the telescope primarily influences the capture FOV and the scanning range of the PAAM.
The telescope considered will have an FOV of 400
Due to the influence of SC pointing jitter and telescope pointing angle jitter, the half-angle of the actual effective beam receiving area can be approximated as the difference between the divergence angle and the angular jitter (Vinet et al., 2019). The pointing error caused by attitude jitter and angular jitter is approximately less than
2.4 PAAM–key distinction between the conventional strategy and the proposed one
Compared to the traditional optical platform design for the acquisition phase, there are three main differences. First, a PAAM has been added to the outgoing optical path to enhance scanning efficiency during the scanning phase in coordination with micro-newton thrusters. The specific details of the scanning process will be thoroughly discussed in what follows. Further, a PAAM monitoring interferometer has been incorporated into the original optical path, utilizing an optical closed-loop system to improve the pointing accuracy of the PAAM. The PAAM monitoring interferometer also enables the PAAM to suppress a portion of the pointing jitter noise introduced by the local optical platform through AEKF. This integration allows the pointing adjustments of both phases to be accomplished within a single phase. Finally, by inserting an AEKF into the PAAM, we can replace the CCD camera with a QPD based on DPS angle measurement technology. This substitution resolves the thermal balance issue of the optical platform and enables immediate tracking and pointing operations after the link establishment.
The PAAM should ideally be placed at the entrance pupil of the telescope, as it alters the outgoing angle of the telescope’s emitted light. Placing the PAAM at this location limits the size of the emitted beam, ensuring that the beam’s spot size within the telescope is well controlled and preventing it from striking structural components and generating stray light. Additionally, an aperture is employed to further constrain the beam’s spot size. By rotating the PAAM, the direction of the transmitted (TX) beam is adjusted.
As shown in Figure 2, PAAM as a two-dimensional motion component mounted on the optical platform that provides the PAA, is one of the key components for establishing the inter-satellite scientific interferometric link (Liu et al., 2022). It needs to address two core technical challenges: (1) Due to the extremely long arm length of the inter-satellite interferometric link, the PAA pre-pointing must achieve high-precision pointing (Wu et al., 2023). (2) The PAAM pointing assembly must maintain ultra-stable optical path stability and avoid introducing any additional optical path noise during its rotation. This is because the PAAM is directly involved in the scientific interferometer, and its optical path performance directly impacts the constellation’s detection accuracy (Liu et al., 2022). The PAAM has a deflection range of
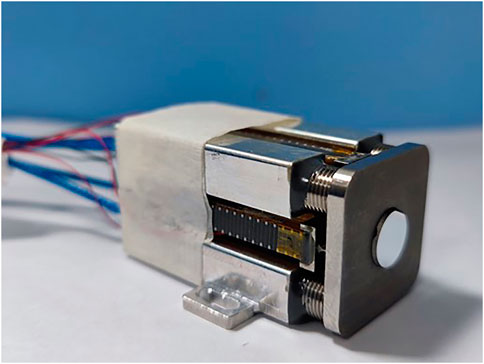
Figure 2. Physical diagram of the PAAM.
2.5 PAA calculated from orbit position and velocity information
At the initial stage of link establishment, the desired attitude of the SC is determined using dual-vector attitude determination based on the PAA and orbital determination errors. Calculating the desired attitude requires converting the SC’s position and velocity in the J2000.0 frame, along with orbit determination errors, into the PAA (Han et al., 2022).
The PAA is defined as the angle between the direction of the transmitted beam from the local SC to the remote SC and the direction of the received beam from the remote SC to the local SC, as illustrated in Figure 3. This angle varies annually with the orbit of the triangular constellation. Throughout this work, the J2000.0 coordinate system is adopted to describe the position and velocity of the SCs.
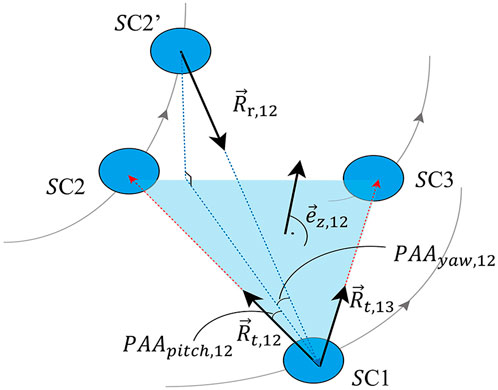
Figure 3. Definition of the point ahead angle.
The positions and velocities of the
the relative position and velocity of two SCs are then given by vector addition or subtraction with respect to the J2000.0 reference frame (Yang et al., 2024). We shall divide the PAA into two parts in the calculations: yaw and pitch, as shown in Figure 3.
To calculate the PAA of the SC, it is necessary to transform the origin of the coordinate system from the J2000.0 coordinate system to the center of mass of the SC. As shown in Figure 3, we define three unit direction vectors of the SC coordinate system as
with
The initial pointing pitch angle is provided by Equations 6, 7
with
The expression of the initial pointing yaw angle is provided by Equation 8
2.6 The uncertainty cone and precison orbit determination in deep space
As illustrated in Figure 4, the size of the uncertainty region during the ATP phase is determined by the SC position (navigation) error introduced by the DSN. As the distance between the Earth and the triangle constellation is very similar to that between Mars and the Earth, the experience for the precision orbit determination of the Martian mission Tianwen I will serve as a useful reference guide (Yang et al., 2022). When the DSN performs 24-h full-arc tracking, the orbit determination accuracy of the SC can reach 50 m (Li and Zheng, 2021). When the DSN tracks for 4 h per day, the orbit determination accuracy of the SC is approximately 400 m–500 m. As the DSN performs 2 h tracking per day, the orbit determination accuracy of the SC is
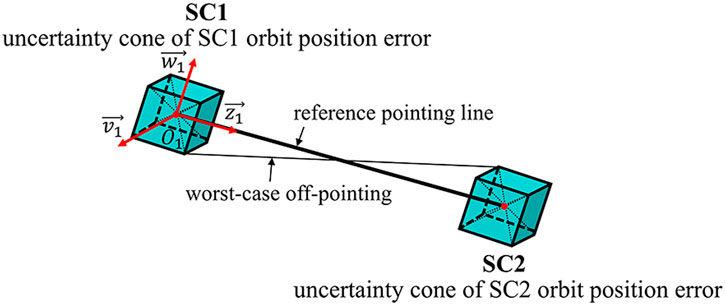
Figure 4. Uncertainty cone generated by the uncertainty of SC position in orbit determination in deep space.
Specifically, this uncertainty is characterized by the angle between the line connecting the two SCs. The following sections provide a detailed explanation of the calculation process (Cirillo and Gath, 2009). The unit position vector from SC1 to SC2 can be expressed by Equations 9, 10
with
the projection of the relative position navigation error vector from SC1 to SC2 in the direction of the relative position vector from SC1 to SC2 can be expressed as
with
the uncertainty region contribution
where
3 Acquisition strategy and capture process
3.1 The acquisition strategies
In our experimental setup for the scanning and acquisition strategy, we assume that
Successful acquisition occurs when the SC detector’s FOV and the laser spot both overlap the target area, enabling link establishment. Given the calculated effective detection range, the original CCD camera has been replaced by a QPD using DPS angle measurement technology. The QPD’s FOV is
Based on the angular size of the uncertainty region after filtering by the AEKF, distinct acquisition strategies have been developed. To facilitate the calculation of scanning time, the AEKF-filtered results are converted into polar coordinates. Using the angular position and radius
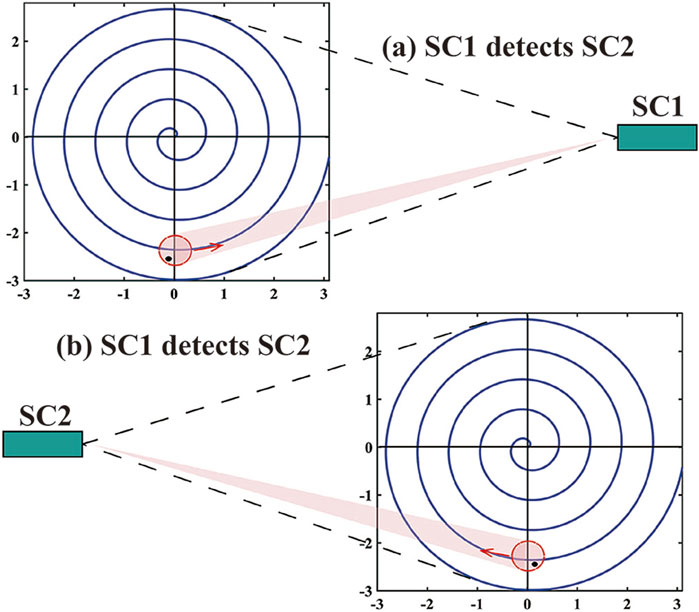
Figure 5. Schematic of the spacecraft scanning at both ends. In (a), SC1 detects SC2, shown with SC1 on the right performing spiral scanning of the uncertainty region. In (b), SC2 detects SC1, shown with SC2 on the left performing spiral scanning of the uncertainty region.
3.1.1 Strategy 1: scan by PAAM
When the uncertain cone angle
3.1.2 Strategy 2: scanning strategy combining PAAM and micro-newton thrusters
When the uncertain cone angle
3.2 Search time
In the ATP phase of the gravitational waves detection in space, a primary focus is placed on enhancing the success probability of link establishment, with an emphasis on minimizing the time required for link establishment while ensuring full coverage scanning. The experimental configuration adopts a spiral scanning method, proven to be an efficient means of encompassing the entire uncertainty region. By setting the spiral line spacing equal to the diameter of the laser beam divergence angle, full coverage of the uncertain region can be achieved during uniform linear velocity scanning. The Archimedean spiral is parameterized as
When scanning the uncertainty region by means of SC attitude adjustments, the scanning process can be regarded as a uniform angular velocity scanning in which the SC’s attitude is fine-tuned through micro-newton thruster adjustments and the SC’s scanning angular velocity is
The scanning process can be regarded as a uniform linear velocity when only the PAAM is used to scan the uncertainty region. Currently, the scanning angular velocity of the PAAM is approximately
In the scanning scheme in which the PAAM is coordinated with SC attitude adjustments, the scanning process can be considered as a discrete motion. Moreover, by adjusting the scanning step size and overlap ratio, full coverage of uncertain areas is maintained. Concurrently, this is paired with the uniform angular velocity scanning strategy of PAAM, allowing the scanning time,
where
where
3.3 The capture process
During the capture phase, the light received from the distant SC is weak, making it challenging for the local detector to observe the distant light spot when the local laser is active. Therefore, at the start of the scanning process, a toggling strategy is adopted: when the local laser is active, the remote receiving SC turns off its laser, and vice versa. That is, the local laser is turned off when the distant SC activates its laser for scanning. The inter-satellite link is established once the scientific QPD on each SC detects an interference signal. After the inter-satellite link is established and before scientific measurements begin, it is necessary to return PAAM to its original position by adjusting the SC’s attitude to avoid exceeding PAAM’s adjustment range during the scientific measurement phase. Specifically, within the detector’s field of view, as PAAM moves toward the zero position, the micro-newton thrusters adjust the SC’s attitude in the opposite direction. Throughout this adjustment, it is crucial to synchronize the speeds of PAAM and the micro-newton thrusters to prevent disruptions to the interference signal on the QPD.
4 Adaptive extended Kalman filter for ATP
In this section, we shall introduce the AEKF method, on the basis of which we develop a new control algorithm for the ATP phase. We will briefly describe the AKEF framework (Yang et al., 2024) and then apply it to the laser link acquisition in what follows.
4.1 Construction of an adaptive extended Kalman filter
Consider a hybrid extended Kalman filter in which the physical system concerned is governed by continuous and nonlinear dynamic equations, and the measurements are discrete in time as shown in Equation 23
where both the dynamic function
We use Gaussian white noise as the system noise in this simulation, with the covariance matrix denoted as
In the AEKF, we can treat the measurement noise as a state quantity and include it in the state equation (Wang et al., 2014). The state equation of the Kalman filter, which includes the extended system noise and the measurement noise, may be written as Equation 25.
where
4.2 ATP control loop design
The AEKF method is an efficient predictive filtering approach that utilizes data from the previous step to predict the outcome of the next step. In a LISA-type mission, unlike the EKF considered before for clock synchronization purposes in the pre-TDI data post-processing (Wang et al., 2014), the AEKF for ATP will be carried out on orbit. Our design of the ATP control mainly includes the beam pointing control of PAAM and the control of the SC’s attitude by the micro-newton thruster. In the PAAM beam pointing control system, the FPGA control chip receives feedback signals from PAAM’s capacitance sensors. In the micro-newton thruster-based SC attitude control system, the thrusters regulate the SC’s attitude by using the feedback signals from STRs and the far-field spot position data of the target SC, which the QPD provides based on DPS angle measurement.
The ATP control system combines the information of the SC orbit integrator for feedforward control. Figure 6 shows the block diagram design of the control system of the ATP. In this control system, a theoretical model is established by AEKF and SC orbital integrator to control the PAAM. The output value controlled by the PID is weighted with the system noise as the state input to AEKF, and the measurement noise is added to simulate the actual situation on the SC. The whole control loop is closed-loop controlled by capacitance sensors, STRs, and a QPD based on DPS angle measurement technology. Taking into account the creep and hysteresis of piezoelectric ceramics in the PAAM, nonlinear compensation, and notching filters are added to the control loop to improve the stability of the whole control loop.
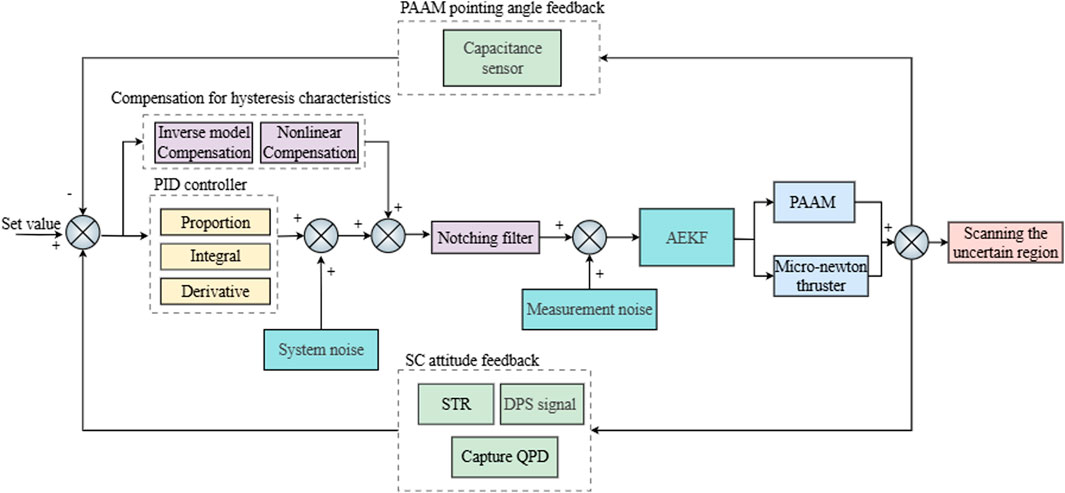
Figure 6. ATP control framework.
4.3 AEKF model for ATP
First, we define a 20-dimensional column state vector, which includes the position and velocity information of three SCs as shown in Equation 26 (Wang et al., 2014; Yang et al., 2024).
where
The dynamics of a single SC is described by the Keplerian equation for planetary motion given by Equation 27
where
The dynamic equations are given by Equations 28, 29
Define
here
For the entire system, the dynamic matrix
Next, we present the two-dimensional measurement equation, which relates the positions and velocities of the three SCs to the yaw and pitch PAAs. In our scheme, the position error in navigation can be expressed by Equation 32
where
As an example, the [1,1] component of
with
In standard practice, the coefficient transfer matrix
In a standard AEKF, the size of the
In this study, the flowchart for ATP based on AEKF is illustrated in Figure 7. During the first step of data preprocessing, we rely on orbit prediction to acquire the SC’s position and velocity information. The system noise data is linearly superimposed onto the orbit prediction data to form the system data. The orbit prediction data, linearly superimposed with the Grace-follow-on orbit STR noise data, constitutes the measurement data input into the AEKF. In the second step, during the AEKF process, the orbit prediction information needs to be updated weekly. Through the filtering results of AEKF, we can calculate the size of the initial uncertain region. Finally, by considering the scanning speeds of PAAM and micro-newton thrusters, we calculated the average scanning time for single-field full coverage under the two scanning strategies and conducted statistical analysis on the experimental results at the same time.
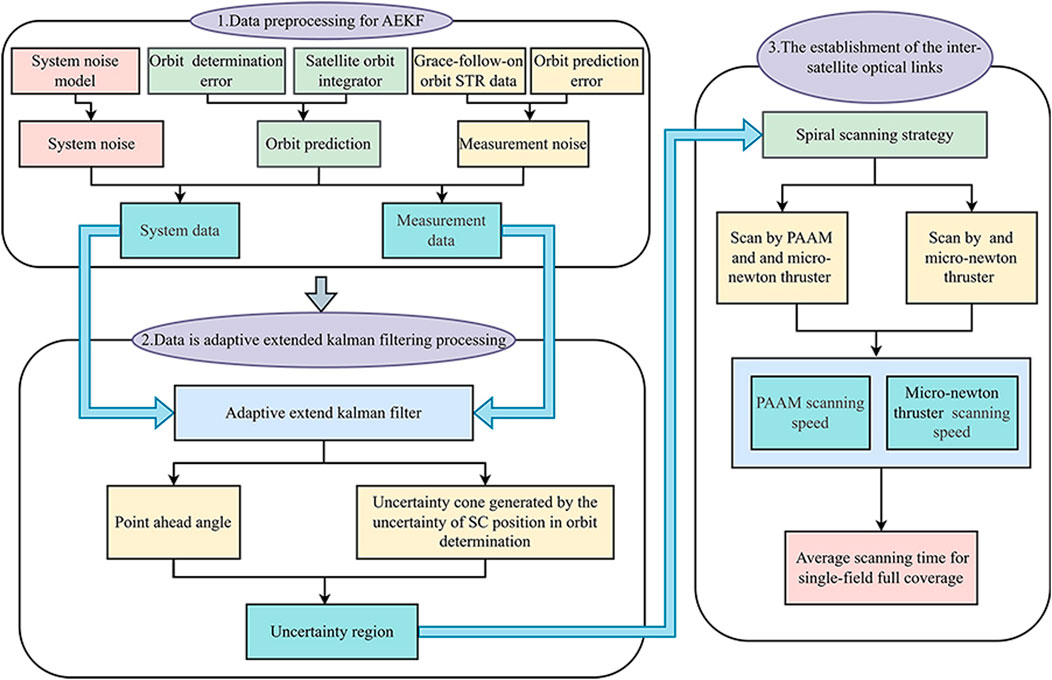
Figure 7. ATP flow chart based on AEKF.
4.4 Noise model
4.4.1 System noise model
To develop a system model for the AEKF, we established a system noise model specific to the ATP phase. This noise model primarily accounts for solar radiation pressure noise, noise induced by SC attitude jitter, and dynamic actuation errors of the PAAM. We imposed a total position error of
4.4.2 Measurement noise model
This section focuses on the ATP noise model, which serves as the basis for quantifying measurement noise in our subsequent simulations. During the simulation, we generate orbital prediction data by linearly superimposing the SC’s position and velocity outputs from the orbital integrator with orbit determination errors modeled as random noise. This resulting data is regarded as the true state for the AEKF. Measurement noise is then linearly added to this true state to produce the simulated measurements used as inputs for the AEKF. Meanwhile, the covariance matrix
The measurement noise model consists of two main components: the noise model for the PAA measurements and the noise model for
4.4.2.1 PAA measurement noise model
The measurement noise model for PAA accounts for various sources and mainly includes piston noise of PAAM, SC attitude jitter noise, laser intensity noise, laser shot noise, STR read-out noise, detector equivalent input current noise and other optical platform noises. During the ATP phase, the readout noise of the STR is the primary source of measurement noise. In our simulation, a STR with
First, we need to convert the STR quaternion data into the Euler angles representing the telescope’s vector direction. The attitude of the SC body relative to the ground inertial coordinate system is defined by the attitude quaternion. The attitude quaternion
As shown in Figure 8, there is a 30° angle between the STR position vector and the telescope exit direction vector, so the STR position vector must be rotated 30° around the Z-axis. If the STR vector direction is expressed as
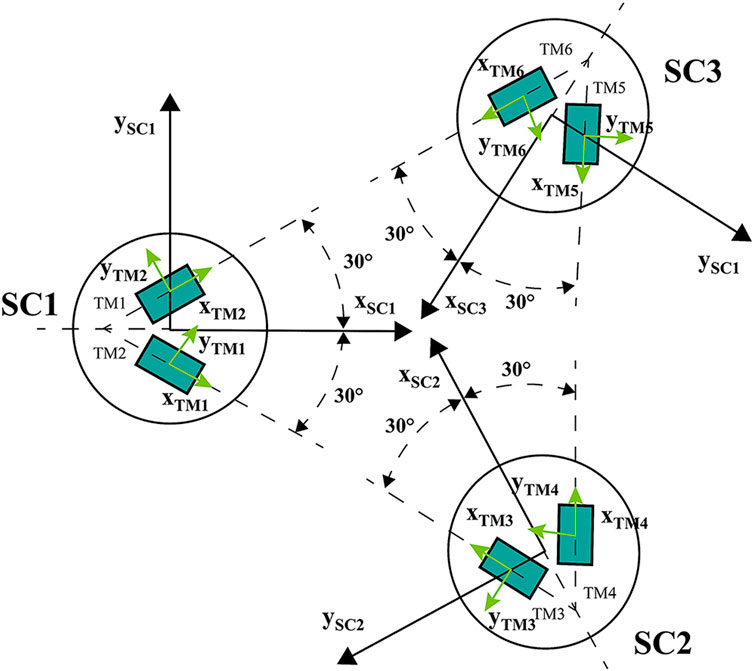
Figure 8. Spacecraft coordinates and telescope coordinates.
The error introduced during the conversion of STR quaternion data to the Euler angles representing the telescope’s vector direction ranges from
Subsequently, by applying amplitude variations to the time-domain noise data, we obtain time-domain PAA measurement noise data with average amplitudes of
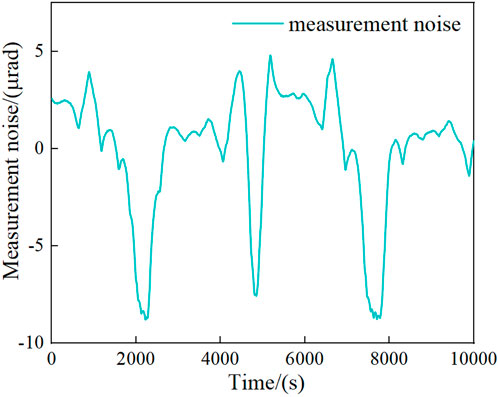
Figure 9. Measuremnet noise.
4.4.2.2 θu measurement noise model
To work out a
here,
Based on the orbital prediction experience from Tianwen-I, when a 24-h orbit determination is conducted using the DSN, the velocity determination error is
5 Results and discussion
In this section, we conduct an error analysis on the results of PAA and
5.1 AEKF result analysis
We simulated measurements of about 10,000 s with a sampling frequency of 1 Hz. Only the laser link between two of the three SCs was considered for analysis in this simulation. Figure 10 shows the AEKF prediction results of the PAA between SC1 and SC2. Before AEKF filtering, the average PAA error between SC1 and SC2 was 9
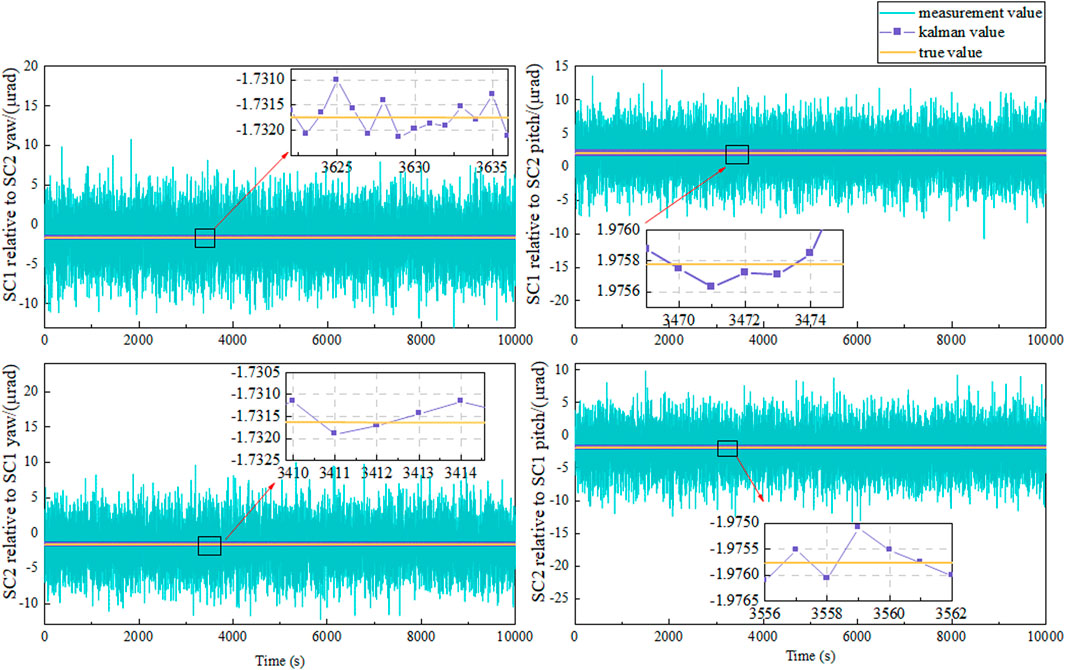
Figure 10. The AEKF prediction results of PAA between SC1 and SC2.
Figure 11 shows the AEKF prediction errors of the PAA between SC1 and SC2. The average prediction error of the AEKF from SC1 relative to SC2 in the pitch direction is
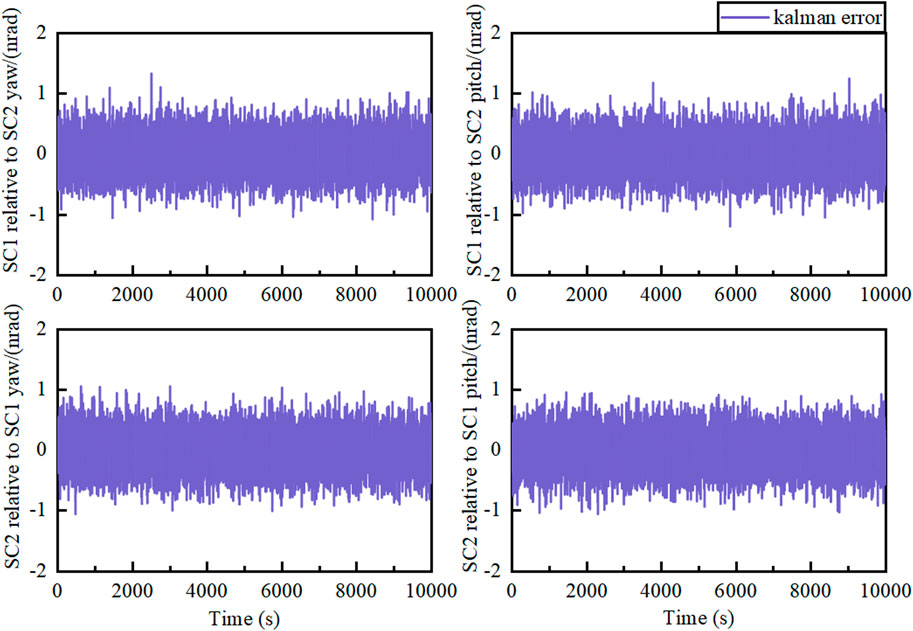
Figure 11. The AEKF prediction errors of PAA between SC1 and SC2.
Figure 12 presents the prediction results of the navigation error between SC1 and SC2 using the AEKF during the scanning process. Before AEKF filtering, the average navigation error of SC1 relative to SC2 was 9
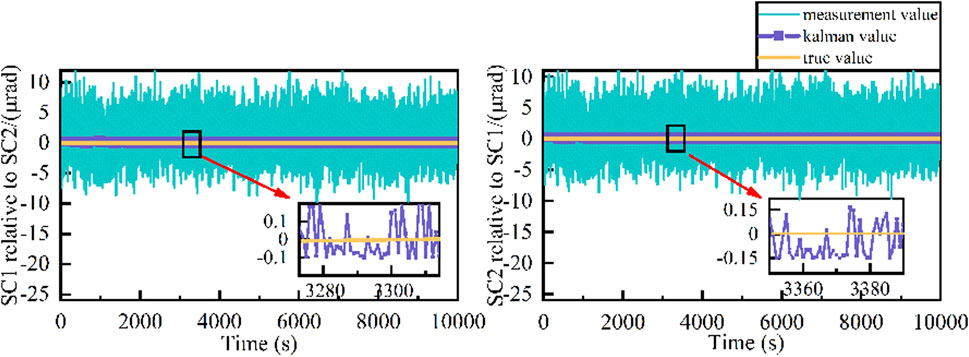
Figure 12.
Table 1 provides a summary of the maximum and average total noise levels under colored measurement noise conditions, as well as the maximum and average prediction errors for PAA and
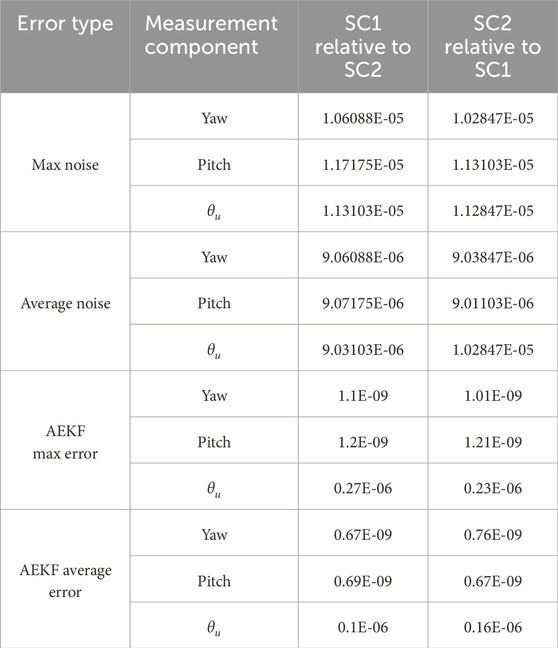
Table 1. AEKF errors between SC1 and SC2.
In our simulation, the orbital dynamics and updates to the SC’s state of motion are incorporated into the iterations of the AEKF. Table 2 summarizes the results of the maximum prediction errors for the pitch PAA and yaw PAA between the two SCs, both before and after filtering.
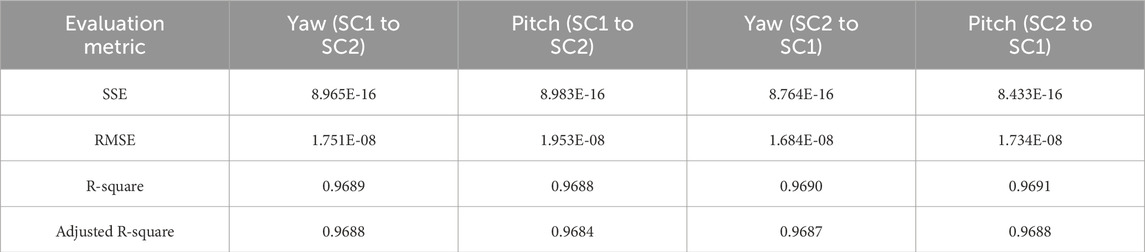
Table 2. Fitting result.
Figure 13 shows the histogram of the pitch and yaw error distribution for SC1 relative to SC2 and SC2 relative to SC1, both before and after AEKF filtering. The AEKF effectively reduces the pitch and yaw errors of SC1 relative to SC2 and SC2 relative to SC1, thereby decreasing the size of the initial uncertainty region during the ATP phase. Furthermore, the AEKF has a more pronounced effect on reducing the RMS of the pitch and yaw direction errors.
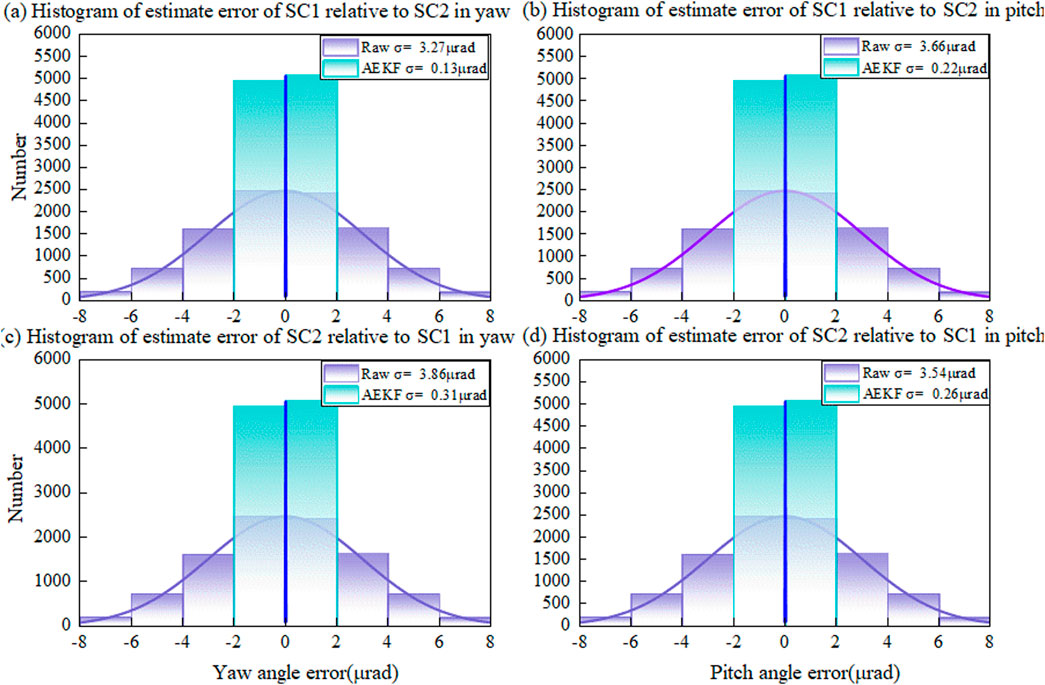
Figure 13. Histogram of the pitch and yaw error distribution between SC1 and SC2 before and after AEKF filtering. (a) Histogram of the estimate error of SC1 relative to SC2 in yaw direction. (b) Histogram of the estimate error of SC1 relative to SC2 in pitch direction. (c) Histogram of the estimate error of SC2 relative to SC1 in yaw direction. (d) Histogram of the estimate error of SC2 relative to SC1 in pitch direction.
5.2 Comparison of single-field full coverage scanning results
Figure 14 shows the cumulative probability curves and probability density curves before and after the application of AEKF under different scanning strategies. The results demonstrate that the scanning method integrating PAAM scanning with SC attitude adjustment can save more scanning time than the method that solely relies on SC attitude adjustment. Meanwhile, under different scanning strategies, AEKF filtering is effective in reducing the scanning time.
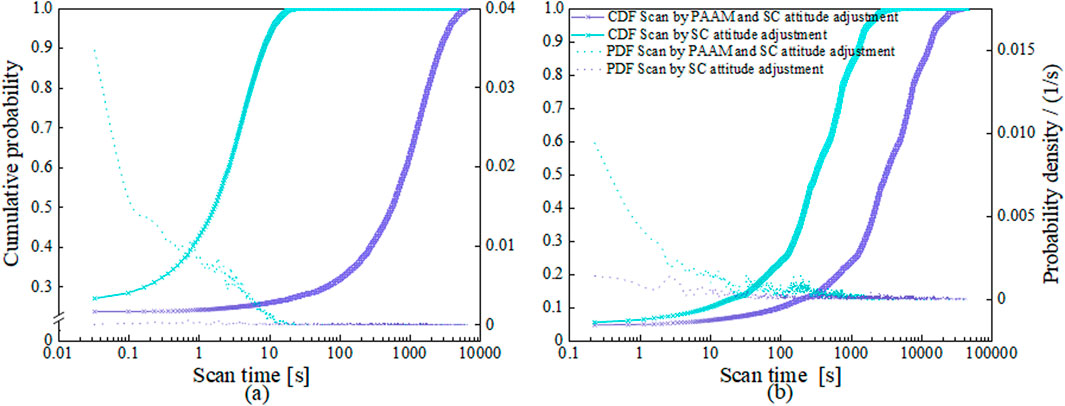
Figure 14. (a) Cumulative probability curves and probability density curves against the scanning time after the application of AEKF. (b) Cumulative probability curves and probability density curves against the scanning time before the application of AEKF.
Table 3 summarizes the average scanning time, both before and after AEKF filtering, required for single-field full coverage. The comparison includes two types of scenarios. One scenario involves scanning using a combination of the PAAM and micro-newton thrusters, while the other relies solely on micro-newton thrusters. The results indicate that AEKF filtering effectively reduces the time needed for full coverage scanning. Furthermore, employing the PAAM in conjunction with micro-newton thrusters significantly enhances the efficiency of the link-establishment process. As a result, it dramatically reduces the overall link acquisition time compared to the traditional strategy that relies solely on micro-newton thrusters.
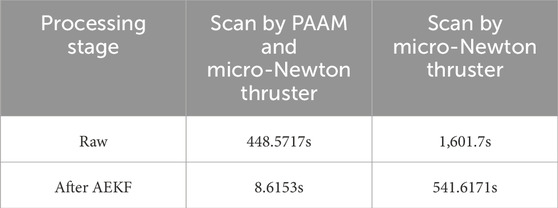
Table 3. Average scanning time comparison before and after AEKF filtering.
6 Concluding remarks
Our work presents a new laser link acquisition scheme in the detection of gravitational waves in space. In place of the CCD camera in the conventional scheme, an AEKF is incorporated into the control loop of the PAAM to steer a laser beam in such a way to reduce the uncertainty cone in the initial acquisition. This scheme relies on high-precision orbit determination data as the initial input, ensuring the effectiveness of the AEKF. In addition, it avoids the heating and ventilation problems associated with CCD cameras and simplifies spacecraft payload design. The proposed scheme also merges the coarse and fine acquisition processes of the conventional method into a single step, thereby improving acquisition efficiency and reducing operational time. Numerical simulations in scenarios closely resemble the prospective on orbit situations further verify the feasibility of this scheme.
Currently, we are setting up a tabletop experiment to validate the AEKF constructed in the hardware setup. In addition, we are also looking at the feasibility to enlarge the dynamic range of the PAAM so as to replace micro-newton thruster scanning functions entirely during the ATP phase. More experimental results will be reported soon. It is also expected that the new scheme will provide new alternatives for establishing laser link in future inter-satellite laser communication systems in deep space.
Data availability statement
All data that support the findings of this study are included within the article (and any supplementary files).
Author contributions
JY: Data curation, Formal Analysis, Methodology, Writing – original draft, Writing – review and editing. YX: Formal Analysis, Writing – review and editing. YF: Methodology, Writing – review and editing. PW: Conceptualization, Methodology, Software, Writing – review and editing. XW: Formal Analysis, Investigation, Supervision, Writing – review and editing. ZC: Methodology, Software, Writing – review and editing. JJ: Resources, Software, Writing – review and editing. YT: Software, Investigation, Writing – review and editing. YL: Data curation, Methodology, Writing – original draft, Writing – review and editing.
Funding
The author(s) declare that financial support was received for the research and/or publication of this article. This work is supported by the National Key R&D Program of China (2022YFC2203701).
Acknowledgments
Our thanks to the hard-working editors and for valuable comments from the reviewers.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Any alternative text (alt text) provided alongside figures in this article has been generated by Frontiers with the support of artificial intelligence and reasonable efforts have been made to ensure accuracy, including review by the authors wherever possible. If you identify any issues, please contact us.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Ales, F., Gath, P. F., Johann, U., and Braxmaier, C. (2014). Modeling and simulation of a laser ranging interferometer acquisition and guidance algorithm. J. Spacecr. Rockets 51, 226–238. doi:10.2514/1.a32567
Cirillo, F., and Gath, P. F. (2009). Control system design for the constellation acquisition phase of the lisa mission. J. Phys. Conf. Ser. 154, 012014. doi:10.1088/1742-6596/154/1/012014
Cui, B., Zhao, G., Xia, Y., Wang, P., and Zhang, Y. (2024). A variable-bandwidth extended state observer for nonlinear systems with measurement noise. IEEE Trans. Industrial Electron. 72, 1946–1957. doi:10.1109/tie.2024.3419254
Danzmann, K.the LISA Study Team (1996). LISA: laser interferometer space antenna for gravitational wave measurements. Class. Quantum Gravity 13, A247–A250. doi:10.1088/0264-9381/13/11A/033
Fattah, S., Zhu, W.-P., and Ahmad, M. (2011). Identification of autoregressive moving average systems based on noise compensation in the correlation domain. IET signal Process. 5, 292–305. doi:10.1049/iet-spr.2009.0240
Gao, R., Liu, H., Zhao, Y., Luo, Z., and Jin, G. (2021a). Automatic, high-speed, high-precision acquisition scheme with QPD for the Taiji program. Opt. Express 29, 821–836. doi:10.1364/oe.408822
Gao, R., Liu, H., Zhao, Y., Luo, Z., Shen, J., and Jin, G. (2021b). Laser acquisition experimental demonstration for space gravitational wave detection missions. Opt. Express 29, 6368–6383. doi:10.1364/oe.414741
Han, X., Peng, X., Tang, W., Yang, Z., Ma, X., Gao, C., et al. (2022). Effect of celestial body gravity on Taiji mission range and range acceleration noise. Phys. Rev. D. 106, 102005. doi:10.1103/physrevd.106.102005
Hechenblaikner, G., Delchambre, S., and Ziegler, T. (2023). Optical link acquisition for the lisa mission with in-field pointing architecture. Opt. and Laser Technol. 161, 109213. doi:10.1016/j.optlastec.2023.109213
Hu, Q.-L., Zhang, J.-Y., Nie, R.-L., Yang, M.-L., Cao, B., Jiao, X.-X., et al. (2024). Ground-based simulation of laser link acquisition for inter-satellite laser interferometry. Opt. Express 32, 31006–31022. doi:10.1364/OE.530639
Li, X., and Kennel, R. (2020). General formulation of kalman-filter-based online parameter identification methods for vsi-fed pmsm. IEEE Trans. Industrial Electron. 68, 2856–2864. doi:10.1109/tie.2020.2977568
Li, Z., and Zheng, J. (2021). Orbit determination for a space-based gravitational wave observatory. Acta Astronaut. 185, 170–178. doi:10.1016/j.actaastro.2021.04.014
Liu, H., Niu, X., Zeng, M., Wang, S., Cui, K., and Yu, D. (2022). Review of micro propulsion technology for space gravitational waves detection. Acta astronaut. 193, 496–510. doi:10.1016/j.actaastro.2022.01.043
Luo, J., Chen, L.-S., Duan, H.-Z., Gong, Y.-G., Hu, S., Ji, J., et al. (2016). TianQin: a space-borne gravitational wave detector. Class. Quantum Gravity 33, 035010. doi:10.1088/0264-9381/33/3/035010
Luo, Z., Wang, Q., Mahrdt, C., Goerth, A., and Heinzel, G. (2017). Possible alternative acquisition scheme for the gravity recovery and climate experiment follow-on-type mission. Appl. Opt. 56, 1495–1500. doi:10.1364/ao.56.001495
Luo, Z., Guo, Z., Jin, G., Wu, Y., and Hu, W. (2020). A brief analysis to Taiji: science and technology. Results Phys. 16, 102918. doi:10.1016/j.rinp.2019.102918
Miao, Y., Jian-cong, L., Hong-an, L., Yao-zhang, H., Jia-xiong, L., Yan-xiong, W., et al. (2023). Design of optical system for low-sensitivity space gravitational wave telescope. Chin. Opt. 16, 1384–1393. doi:10.37188/CO.2023-0006
Vidano, S., Novara, C., Colangelo, L., and Grzymisch, J. (2020). The lisa dfacs: a nonlinear model for the spacecraft dynamics. Aerosp. Sci. Technol. 107, 106313. doi:10.1016/j.ast.2020.106313
Vinet, J.-Y., Christensen, N., Dinu-Jaeger, N., Lintz, M., Man, N., and Pichot, M. (2019). LISA telescope: phase noise due to pointing jitter. Class. Quantum Gravity 36, 205003. doi:10.1088/1361-6382/ab3a16
Wang, Y., Heinzel, G., and Danzmann, K. (2014). First stage of LISA data processing: clock synchronization and arm-length determination via a hybrid-extended Kalman filter. Phys. Rev. D. 90 (APS), 064016. doi:10.1103/physrevd.90.064016
Wu, Y., Hai, H., Fang, S., Fan, W., Song, J., Zhao, K., et al. (2023). A fast steering mirror with ultra-low geometric tilt-to-length coupling noise for space-borne gravitational wave detection. Meas. Sci. Technol. 35, 015407. doi:10.1088/1361-6501/ad0317
Yang, P., Huang, Y., Li, P., Wang, H., Fan, M., Liu, S., et al. (2022). Orbit determination of China’s first mars probe Tianwen-1 during interplanetary cruise. Adv. Space Res. 69, 1060–1071. doi:10.1016/j.asr.2021.10.046
Yang, J., Xie, Y., Tang, W., Liang, X., Zhang, L., Cui, Z., et al. (2024). Adaptive extended kalman filter and point ahead angle prediction in the detection of gravitational waves in space. Phys. Rev. D. 110, 102007. doi:10.1103/PhysRevD.110.102007
Yu, M., Huang, L., Liu, Y., Zou, D., Lin, H.-a., Li, J., et al. (2024). Simulation alignment of optical system for space gravitational wave telescope. Meas. Sci. Technol. 35, 066004. doi:10.1088/1361-6501/ad2cdc
Keywords: gravitational waves detection in space, intersatellite laser link establishment, adaptive extended Kalman filtering (AEKF), point ahead angle (PAA), colored measurement noise
Citation: Yang J, Xie Y, Fan Y, Wang P, Wang X, Cui Z, Jia J, Tang Y and Lau YK (2025) Adaptive extended Kalman filter and laser link acquisition in the detection of gravitational waves in space. Front. Astron. Space Sci. 12:1664938. doi: 10.3389/fspas.2025.1664938
Received: 13 July 2025; Accepted: 29 August 2025;
Published: 01 October 2025.
Edited by:
Gang Wang, Ningbo University, ChinaReviewed by:
Ruihong Gao, Institute of Mechanics (CAS), ChinaBing Cui, Beijing Institute of Technology, China
Copyright © 2025 Yang, Xie, Fan, Wang, Wang, Cui, Jia, Tang and Lau. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Yucheng Tang, dGFuZ3l1Y2hlbmdAbWFpbC5zaXRwLmFjLmNu; Yun Kau Lau, bGF1QGFtc3MuYWMuY24=