 Huilan Li
Huilan Li Yun Wan2
Yun Wan2- 1College of Traffic and Transportation, Chongqing Jiaotong University, Chongqing, China
- 2College of New Energy Vehicle Engineering, Chongqing City Vocational College, Chongqing, China
Introduction: Ensuring safe driving and effective risk control is critical for the dynamic operation of autonomous new energy vehicles (NEVs), particularly under complex traffic conditions. A key challenge lies in unifying risk assessment across diverse driving scenarios, which hinders reliable and adaptive risk management in autonomous systems.
Methods: To address this challenge, a local traffic risk evaluation framework tailored for NEVs is proposed, grounded in the principle of least action. The method constructs a virtual force system centered on the autonomous NEV, integrating three components: (1) virtual risk force to capture vehicle-to-vehicle interaction risks; (2) virtual driving force reflecting the vehicle’s motion intention; and (3) virtual regulatory force to enforce traffic rule compliance. By modeling the action of this force system, a novel metric for local traffic safety is formulated, enabling real-time risk assessment and informing control strategies.
Results: The proposed method was validated through simulations across typical hazardous scenarios, including rear-end collisions, emergency deceleration, lane changes, and intersection conflicts. Simulations demonstrated that the framework enables timely risk perception and adaptive control behaviors (e.g., braking, evasive lane changes), which substantially improved the driving safety of NEVs.
Discussion: This work provides a unified and computationally efficient tool for enhancing risk-aware decision-making and control in autonomous NEVs. By addressing the challenge of scenario-unified risk assessment, it contributes to the safer deployment of autonomous NEVs and their more intelligent integration into traffic systems.
1 Introduction
The rapid development of autonomous driving technology is reshaping the future of transportation, with new energy vehicles (NEVs) emerging as a key platform for its implementation. By integrating electrification with intelligent driving systems, autonomous NEVs offer a sustainable and efficient mobility solution. Compared to conventional internal combustion engine vehicles, NEVs benefit from inherently abundant electrical power, which provides a favorable foundation for supporting the high energy demands of autonomous driving systems, including onboard sensors, computing units, and communication modules. Equipped with sophisticated perception, planning, and control algorithms, autonomous NEVs are designed to operate with minimal human input in complex and dynamic traffic environments. Nevertheless, ensuring safe and reliable autonomous operation across diverse real-world driving scenarios remains a significant challenge. The variability of road geometries, unpredictable behavior of other road users, and complex vehicle interactions call for robust and adaptive safety evaluation frameworks. In this context, accurately assessing local driving risks and enabling risk-aware decision-making are critical to enhancing the safety performance of autonomous NEVs and facilitating their large-scale deployment (Gao et al., 2022; Lu et al., 2022).
Evaluating the safety of a vehicle’s actions is a complex task due to the variety of scenarios an autonomous vehicle may encounter. Each scenario—lane changes, following another vehicle, or navigating through intersections—requires specific safety metrics to assess the risks involved accurately. For example, we evaluate lane-change scenarios using the available gap for a safe transition (Chen et al., 2021; Liu et al., 2021), assess car-following scenarios using metrics such as time to collision (TTC), inverse TTC, time-exposed TTC, time-integrated TTC, and time headway (THW) (Mao et al., 2021; Son et al., 2021; Li et al., 2022; Zhang et al., 2022), and evaluate intersection scenarios based on time to intersection (TTI). These metrics are often discrete and context-specific, making developing a unified safety evaluation method challenging.
The indicators mentioned in longitudinal and lateral contexts represent safety distance methods grounded in vehicle kinematics theory, incorporating both space and time dimensions. These methods primarily calculate driving risk through the vehicle’s state information and the relative motion between two vehicles. The simplicity and physical relevance of the parameters, which closely align with a driver’s intuitive understanding of safety, have made these methods widely used.
However, the rapid advancement of sensors, communication, and intelligent transportation technologies necessitates a breakthrough in critical technologies to advance intelligent vehicles beyond Level 2 (L2) and into Level 3 (L3) and higher levels of autonomous driving. Most current methods only apply to developing intelligent driving technology at Level 2 and below.
Researchers have recently developed quantitative risk assessment methods based on the artificial potential field (APF). They use APF as a typical two-dimensional driving risk assessment approach, incorporating longitudinal and lateral indicators to describe the relationship and risk levels between vehicles and their surrounding environment. This method is now being applied to research on intelligent vehicle safety algorithms.
The APF method, originally introduced by Khatib and Le Maitre (1978) in 1978 for robot control, has since evolved to describe driving risk levels. Researchers from institutions such as Drexel University (Bhatt et al., 1987) and the Georgia Institute of Technology (Arkin and Murphy, 1990) have applied APF to analyze the risk environment for autonomous vehicles. Gerdes and Rossetter (2001) advanced this by creating a risk distribution map and a unified driving assistance system based on APF. Matsumi et al. (2013) used APF to prevent vehicle collisions with pedestrians at intersections and protect vulnerable road users. Huang et al. (2021) developed a dynamic potential field for vehicle decision-making and motion planning using the APF model. Despite these advancements, the application scenarios for APF-based methods remain limited, and the model’s adaptability needs improvement. While APF theory matures and effectively assesses driving risk in areas like car following, path planning, and collision avoidance, previous studies have often overlooked critical factors. These include the driver’s psychological, physiological, and behavioral traits, complex weather and road conditions, and the interaction of various factors within the driver-vehicle-road system. To enhance driving safety assessments, Wang et al. (2016) proposed the “driving safety field (DSF)” model, which considers a comprehensive set of driver, vehicle, and road factors. However, the DSF model faces challenges in establishing a clear physical meaning for the coupling relationships between parameters.
In summary, several studies have been conducted on driving risk assessments, but various deficiencies exist. In this study, we construct a virtual force system from the perspective of autonomous vehicles, presenting a local traffic safety assessment method based on the principle of least action. The main contributions of this study are as follows:
(1) Established a virtual force system centered on the autonomous vehicle that incorporates virtual risk forces, virtual driving forces, and virtual traffic regulation constraint forces.
(2) Established a virtual risk force that satisfies Newton’s Third Law, achieving
(3) Proposed a local traffic safety instantaneous evaluation index to achieve unified risk assessment across different driving scenarios.
The remainder of this article is organized as follows. Section 2 analyzes the driving process and establishes a physical model of vehicle motion. In Section 3, we study the virtual force system from the perspective of autonomous vehicles. According to the proposed virtual force system, we set up a local traffic safety assessment method in Section 4. In Section 5, we applied the established method in hazard scenarios by MATLAB’s Driving Scenario Designer to verify the effectiveness of the proposed model. In Section 6, we conclude this study.
2 The physical model of vehicle motion
The vehicle is influenced by three aspects of the driver-vehicle-road closed-loop system during driving: (1) the driver’s driving goals, (2) the impact of the dynamic traffic environment, and (3) the constraints imposed by traffic regulations. Based on this concept, we can vividly describe the driving process as a small ball rolling down from the top of a U-shaped groove, as shown in Figure 1.
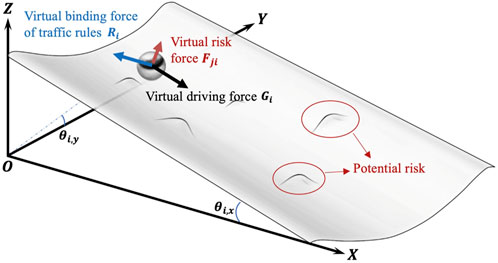
Figure 1. The physical model of vehicle motion.
As shown in Figure 1, the ball is subject to three types of forces during its downward rolling: (1) a virtual driving force driven by the driving target; (2) a virtual risk external force influenced by the dynamic traffic environment; (3) a virtual constraint resistance generated by traffic rules. In addition, the inclination angle of the U-shaped groove relates to the driver’s expected speed or expectation of mobility. The ball moves longitudinally when
We define the virtual driving force as
3 Virtual force system from the perspective of autonomous vehicles
This study constructs a virtual force system from the perspective of autonomous vehicle
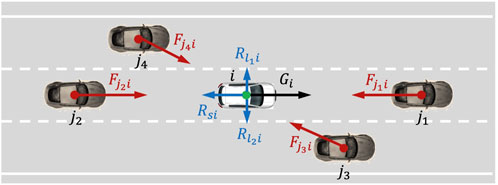
Figure 2. Virtual force system from the perspective of autonomous vehicles.
3.1 Virtual risk forces
We proposed the basic driving-risk-field force model in the previous study by analyzing the relationship between force work and energy conversion in the collision process (Zheng et al., 2024). That is,
Where
We analyze the vehicle-to-vehicle interaction to quantify the risk between two moving objects in space, as shown in Figure 3. Vehicles
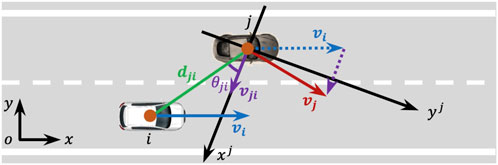
Figure 3. Vehicle-to-vehicle interaction schematic diagram.
To achieve
where, Mji, Vji and rji′ can be expressed as Equations 4–6
If the actual geographical coordinates of the vehicles
3.2 Virtual driving force
The virtual driving force causes vehicle
3.2.1 Longitudinal driving force
The virtual force
where
where
3.2.2 Lateral driving force
When vehicle
where
3.3 Virtual traffic regulation constraint force
Traffic rules impose various constraints on vehicles, such as traffic lights, pedestrian crossings, speed limit signs, and road markings, which can restrict vehicle movement. In this study, we consider only the longitudinal constraint on vehicle movement due to road speed limit signs and the lateral constraint due to road markings.
3.3.1 Longitudinal constraint resistance
Because road speed limit rules are effective everywhere on the road they pertain to, the constraint is only related to speed. If the vehicle
where
3.3.2 Lateral constraint resistance
Road traffic markings include white dashed/solid lines, double white dashed/solid lines, yellow dashed/solid lines, and double yellow dashed/solid lines. Each type of road traffic marking has different meanings and serves to constrain the risks associated with vehicle operation. This study focuses on the white dashed lines painted on road segments to separate traffic flows traveling in the same direction, commonly called lane lines. Research has shown that wider lanes are not necessarily safer; setting narrower lanes, although typically causing vehicles to travel at slower speeds, can make drivers more focused and thereby reduce the probability of traffic accidents (Godley et al., 2004; Potts et al., 2007; Labi et al., 2017). This indicates that road traffic markings play a role in guiding and constraining driving behavior. Lane markings influence the lateral behavior of vehicles. Road traffic markings do not directly affect the risk of vehicle operation, and vehicles do not cause traffic accidents solely by crossing road traffic markings. Typically, road traffic markings are seen as providing a virtual constraint (such as lane keeping) on the lateral movement of vehicles during their operation (Gerdes et al., 2001; Rossetter et al., 2004; Rossetter and Gerdes, 2005; Talvala et al., 2011). In this study, the constraint imposed by road traffic markings on vehicles is defined as Equation 15
where
A comprehensive system is established by modeling virtual forces in the local road traffic environment of autonomous vehicles, integrating vehicle motion, traffic regulations, and risks from other vehicles. The following sections will conduct safety assessment research on the local road traffic environment under this virtual force system framework.
4 Local traffic safety assessment methods
In the virtual force system established from the perspective of autonomous vehicles in Section 3, we can analyze the driving safety of autonomous vehicles in the local traffic environment using the principle of minimum action (Wang et al., 2020; Zheng et al., 2021). First, as shown in Figure 2, centered around autonomous vehicle
Based on Equation 3, the virtual risk potential energy
where the expressions for R1 and R2 are as Equations 17–18.
Therefore, the total virtual risk potential energy
For simplicity, when modeling the virtual driving potential energy
where
At the same time, ignoring the influence of
Therefore, in the virtual force system centered around vehicle
According to the principle of minimum action, the action equation for the virtual force system centered around vehicle
where
Theoretically, the lower the total potential energy of vehicle
where
5 Hazard scenario design and simulation analysis
Driving safety is influenced by the vehicle’s motion state. Any vehicle’s hazardous behavior will quickly impact adjacent vehicles’ safety and gradually affect the safety and efficiency of the entire traffic flow. In this section, we design various hazard scenarios from the perspective of autonomous vehicles to demonstrate the effectiveness of the proposed local traffic safety assessment method. These scenarios include rear-end scenarios, a cut-in scenario, and an intersection collision scenario. By calculating the absolute value of the action
Figure 4 shows the designed rear-end (collision) scenario, where autonomous vehicle
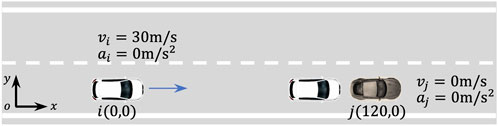
Figure 4. Rear-end (collision) scenario.
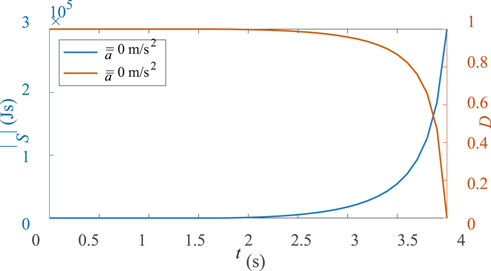
Figure 5. Instantaneous risk simulation results for the rear-end (collision) scenario.
First, we design a deceleration to avoid collision scenario with three different deceleration rates:
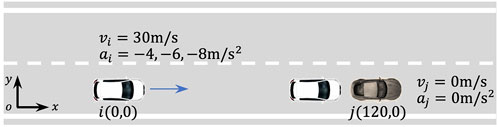
Figure 6. Rear-end (deceleration to avoid collision) scenario.
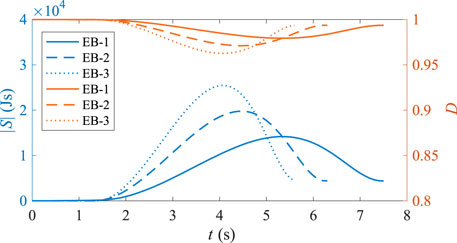
Figure 7. Instantaneous risk simulation results for the rear-end (deceleration to avoid collision) scenario.
From the figure, we can observe that due to the braking of vehicle
To avoid rear-end collisions, in addition to braking to decelerate the vehicle, lane-changing can also be employed. Therefore, we designed a lane-change avoidance scenario, as shown in Figure 8. For comparison purposes, vehicle
Figure 8. Rear-end (lane change to avoid collision) scenario.
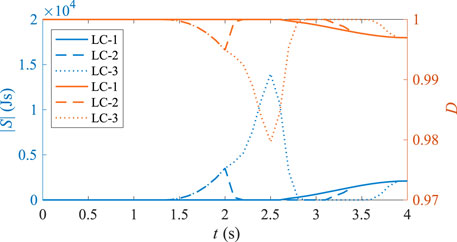
Figure 9. Instantaneous risk simulation results for the rear-end (lane change to avoid collision) scenario.
The figure shows that compared to the rear-end collision scenario, the absolute value of the action
When an obstacle is in front of the vehicle, the vehicle can change lanes to avoid rear-end collisions. However, if the vehicle is too close to other vehicles in the adjacent lane during the lane change, it can pose a risk. Therefore, we designed a cut-in scenario, as shown in Figure 10. For comparison, we designed vehicle
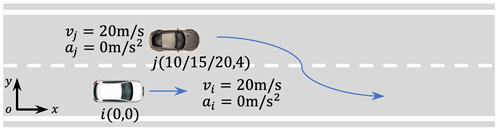
Figure 10. Cut-in scenario.
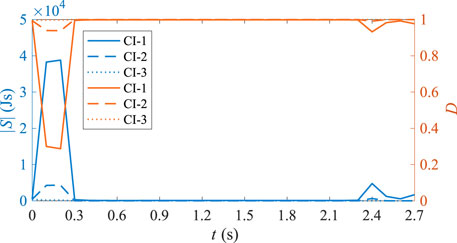
Figure 11. Instantaneous risk simulation results for the cut-in scenario.
The figure shows that the closer the initial distance between the two vehicles during the cut-in, the greater the risk, which aligns with practical observations. The results also indicate that a vehicle should maintain a sufficient longitudinal distance from vehicles in the adjacent lane before changing lanes.
Research (Zhao et al., 2019) indicates that traffic accidents at non-signalized intersections are generally more severe than those at signalized intersections, and advanced driving assistance systems, such as emergency braking systems, are ineffective in mitigating accidents at non-signalized intersections. Therefore, this study conducts a simulation analysis for non-signalized intersections.
First, we design a collision scenario at a non-signalized intersection, as shown in Figure 12. Vehicles
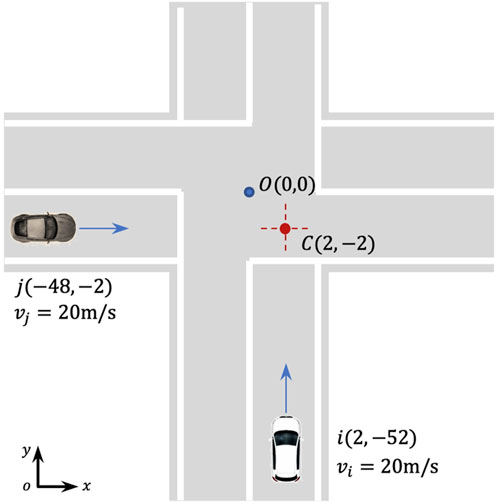
Figure 12. Non-signalized intersections (collision) scenario.
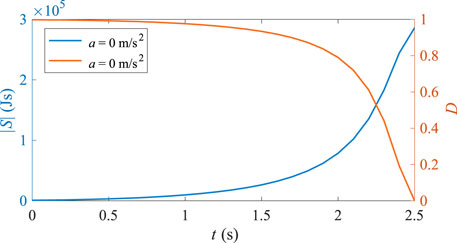
Figure 13. Instantaneous risk simulation results for the non-signalized intersection collision scenario.
The results reveal that as time progresses, the absolute value of the action
Assume that autonomous vehicle
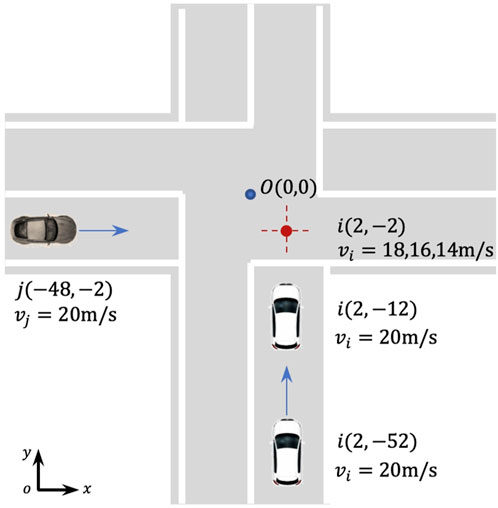
Figure 14. Non-signalized intersections (deceleration to avoid collision) scenario.
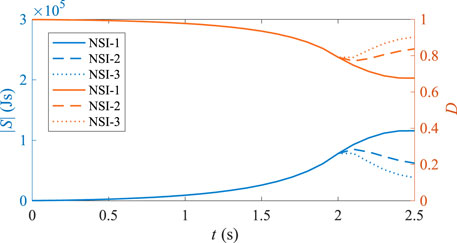
Figure 15. Instantaneous risk simulation results for the non-signalized intersections (deceleration to avoid collision) scenario.
6 Conclusion
In this study, we propose a local traffic safety evaluation method specifically designed for NEVs. By integrating a system of virtual forces to represent driving intentions, regulatory constraints, and interactive dynamics with surrounding vehicles, the method establishes a unified and real-time framework for evaluating driving safety under complex conditions. Through simulations of representative scenarios—including rear-end risks, emergency deceleration, lane changes, cut-ins, and intersection conflicts—the proposed approach effectively predicts and quantifies potential risks. Results demonstrate that timely hazard recognition and the execution of appropriate maneuvers, such as braking or evasive lane changes, substantially reduce local driving risk and enhance overall safety performance. The proposed evaluation framework offers critical support for the design and optimization of autonomous driving algorithms on NEV platforms, contributing to the development of safer, more adaptive, and energy-efficient intelligent transportation systems.
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
HL: Writing – original draft and Writing – review and editing. YW: Data curation, Formal Analysis, Writing – original draft. JS: Software and Writing – original draft. XX: Supervision and Writing – review and editing.
Funding
The author(s) declare that financial support was received for the research and/or publication of this article. This work was supported by the Natural Science Foundation of Chongqing under Grant cstc2021jcyj-msxmX0708, in part by the Youth Project of Science and Technology Research Program of Chongqing Education Commission of China under Grant Nos. KJQN202303902 and KJQN202403905, and in part by the Chongqing City Vocational College Research Project under Grant No. XJKJ202301001.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Arkin, R. C., and Murphy, R. R. (1990). Autonomous navigation in a manufacturing environment. IEEE Trans. Robotics Automation 6, 445–454. doi:10.1109/70.59355
Bhatt, R., Gaw, D., and Meystel, A. (1987). “A real-time guidance system for an autonomous vehicle,” in 1987 IEEE international conference on robotics and automation proceedings, 1785–1791. doi:10.1109/ROBOT.1987.1087769
Chen, D., Srivastava, A., and Ahn, S. (2021). Harnessing connected and automated vehicle technologies to control Lane changes at freeway merge bottlenecks in mixed traffic. Transp. Res. Part C Emerg. Technol. 123, 102950. doi:10.1016/j.trc.2020.102950
Gao, F., Mu, J., Han, X., Yang, Y., and Zhou, J. (2022). Performance limit evaluation strategy for automated driving systems. Automot. Innov. 5, 79–90. doi:10.1007/s42154-021-00168-8
Gerdes, J. C., and Rossetter, E. J. (2001). A unified approach to driver assistance systems based on artificial potential fields. Transactions-American Soc. Mech. Eng. J. Dyn. Syst. Meas. Control 123, 431–438. doi:10.1115/1.1386788
Gerdes, J. C., Rossetter, E. J., and Saur, U. (2001). Combining lanekeeping and vehicle following with hazard maps. Veh. Syst. Dyn. 36, 391–411. doi:10.1076/vesd.36.4.391.3548
Godley, S. T., Triggs, T. J., and Fildes, B. N. (2004). Perceptual Lane width, wide perceptual road centre markings and driving speeds. Ergonomics 47, 237–256. doi:10.1080/00140130310001629711
Huang, C., Lv, C., and Xing, Y. (2021). Toward safe and personalized autonomous driving: decision-making and motion control with DPF and CDT techniques. IEEE/ASME Trans. Mechatronics 26, 611–620. doi:10.1109/tmech.2021.3053248
Khatib, O., and Le Maitre, J. F. (1978). “Dynamic control of manipulators operating in a complex environment,” in On theory and practice of robots and manipulators, 3rd CISM-IFToMM symp, 267–282. Available online at: http://www-cs.stanford.edu/group/manips/publications/pdfs/Khatib_1978.pdf.
Labi, S., Chen, S., Preckel, P. V., Qiao, Y., and Woldemariam, W. (2017). Rural two-lane highway shoulder and Lane width policy evaluation using multiobjective optimization. Transp. A Transp. Sci. 13, 631–656. doi:10.1080/23249935.2017.1315841
Li, Y., Lv, Q., Zhu, H., Li, H., Li, H., Hu, S., et al. (2022). Variable time headway policy based platoon control for heterogeneous connected vehicles with external disturbances. IEEE Trans. Intell. Transp. Syst. 23, 21190–21200. doi:10.1109/TITS.2022.3170647
Liu, X., Wang, Y., Zhou, Z., Nam, K., Wei, C., and Yin, C. (2021). Trajectory prediction of preceding target vehicles based on Lane crossing and final points generation model considering driving styles. IEEE Trans. Veh. Technol. 70, 8720–8730. doi:10.1109/TVT.2021.3098429
Lu, H., Lu, C., Yu, Y., Xiong, G., and Gong, J. (2022). Autonomous overtaking for intelligent vehicles considering social preference based on hierarchical reinforcement learning. Automot. Innov. 5, 195–208. doi:10.1007/s42154-022-00177-1
Mao, S., Xiao, G., Lee, J., Wang, L., Wang, Z., and Huang, H. (2021). Safety effects of work zone advisory systems under the intelligent connected vehicle environment: a microsimulation approach. JICV 4, 16–27. doi:10.1108/JICV-07-2020-0006
Matsumi, R., Raksincharoensak, P., and Nagai, M. (2013). Autonomous braking control system for pedestrian collision avoidance by using potential field. IFAC Proc. Vol. 46, 328–334. doi:10.3182/20130904-4-JP-2042.00064
Potts, I. B., Harwood, D. W., and Richard, K. R. (2007). Relationship of Lane width to safety on urban and suburban arterials. Transp. Res. Rec. 2023, 63–82. doi:10.3141/2023-08
Rossetter, E. J., and Gerdes, J. C. (2005). Lyapunov based performance guarantees for the potential field lane-keeping assistance system. J. Dyn. Sys., Meas. Control 128, 510–522. doi:10.1115/1.2192835
Rossetter, E. J., Switkes, J. P., and Gerdes, J. C. (2004). Experimental validation of the potential field lanekeeping system. Int. J. Automot. Technol. 5, 95–108. Available online at: https://koreascience.kr/article/JAKO200411922949672.page
Son, S., Park, J., Oh, C., and Yeom, C. (2021). An algorithm for detecting collision risk between trucks and pedestrians in the connected environment. J. Adv. Transp. 2021, 1–9. doi:10.1155/2021/9907698
Talvala, K. L. R., Kritayakirana, K., and Gerdes, J. C. (2011). Pushing the limits: from lanekeeping to autonomous racing. Annu. Rev. Control 35, 137–148. doi:10.1016/j.arcontrol.2011.03.009
Wang, J., Wu, J., Zheng, X., Ni, D., and Li, K. (2016). Driving safety field theory modeling and its application in pre-collision warning system. Transp. Res. Part C Emerg. Technol. 72, 306–324. doi:10.1016/j.trc.2016.10.003
Wang, J., Zheng, X., and Huang, H. (2020). Decision-making mechanism of the drivers following the principle of least action. China J. Highw. Transp. 33, 155–168. doi:10.19721/j.cnki.1001-7372.2020.04.016
Zhang, P., Zhu, B., Zhao, J., Fan, T., and Sun, Y. (2022). Performance evaluation method for automated driving system in logical scenario. Automot. Innov. 5, 299–310. doi:10.1007/s42154-022-00191-3
Zhao, Z., Zheng, X., Wang, J., Xu, Q., and Kodaka, K. (2019). Assessing performance of collision mitigation brake system in Chinese traffic environment. J. Cent. South Univ. 26, 2854–2869. doi:10.1007/s11771-019-4219-z
Zheng, X., Huang, H., Wang, J., Zhao, X., and Xu, Q. (2021). Behavioral decision-making model of the intelligent vehicle based on driving risk assessment. Computer-Aided Civ. Infrastructure Eng. 36, 820–837. doi:10.1111/mice.12507
Keywords: driving risk, risk assessment, virtual force modeling, autonomous driving, new energy vehicles
Citation: Li H, Wan Y, Shang J and Xu X (2025) Risk-aware local traffic safety evaluation for autonomous new energy vehicles based on virtual force modeling. Front. Mech. Eng. 11:1658915. doi: 10.3389/fmech.2025.1658915
Received: 03 July 2025; Accepted: 14 July 2025;
Published: 06 August 2025.
Edited by:
Liguo Zang, Nanjing Institute of Technology (NJIT), ChinaReviewed by:
Wang Hongliang, Nanjing University of Science and Technology, ChinaYougang Bian, Hunan University, China
Copyright © 2025 Li, Wan, Shang and Xu. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Xiangyang Xu, eHlhbmd4dUAxNjMuY29t