 Wei Li
Wei Li Ping Shi*
Ping Shi*- Institute of Rehabilitation Engineering and Technology, University of Shanghai for Science and Technology, Shanghai, China
Amputation of the upper limb brings heavy burden to amputees, reduces their quality of life, and limits their performance in activities of daily life. The realization of natural control for prosthetic hands is crucial to improving the quality of life of amputees. Surface electromyography (sEMG) signal is one of the most widely used biological signals for the prediction of upper limb motor intention, which is an essential element of the control systems of prosthetic hands. The conversion of sEMG signals into effective control signals often requires a lot of computational power and complex process. Existing commercial prosthetic hands can only provide natural control for very few active degrees of freedom. Deep learning (DL) has performed surprisingly well in the development of intelligent systems in recent years. The significant improvement of hardware equipment and the continuous emergence of large data sets of sEMG have also boosted the DL research in sEMG signal processing. DL can effectively improve the accuracy of sEMG pattern recognition and reduce the influence of interference factors. This paper analyzes the applicability and efficiency of DL in sEMG-based gesture recognition and reviews the key techniques of DL-based sEMG pattern recognition for the prosthetic hand, including signal acquisition, signal preprocessing, feature extraction, classification of patterns, post-processing, and performance evaluation. Finally, the current challenges and future prospects in clinical application of these techniques are outlined and discussed.
1. Introduction
For human, the worth of hand is indisputable. The hand is the most diverse and dexterous part of the human body, which can execute various activities to interact with the environment by adopting a variety of different motion strategies (Feix et al., 2016; Sartori et al., 2016). With the rapid development of physiology, anatomy, mechatronics, and software, various types of prosthetic hands have appeared in the market (Jiang et al., 2014a; Amsuess et al., 2016; Nissler et al., 2016), such as i-Limb hand (van der Niet et al., 2013), SmartHand (Cipriani et al., 2011a), Michelangelo hand (Luchetti et al., 2015), iCub hand (Schmitz et al., 2010), and HIT/DLR prosthetic hand (Butterfass et al., 2001). These prosthetic hands have been developed with more and more degrees of freedom (DOFs) to achieve the goal of completing the amputees' activities of daily living. However, because of the restriction of human–computer interaction (HCI), the existing prosthetic hands has great difficulty in reproducing the flexibility and function of biological hands and the life of hand amputees is still very difficult (Farina and Aszmann, 2014; Ortiz-Catalan et al., 2015; Chadwell et al., 2016). Recently, biological signals, which contain abundant information about the human body's motion intention, have shown broad prospects in HCI field. Specifically, surface electromyography (sEMG) signals reflects information of upper limb neuromuscular system, which has great potential for controlling prosthetic hand (Saponas et al., 2008; Khushaba et al., 2012; Farina et al., 2014a).
When skeletal muscles are activated by physiological neural activity, sEMG records internal muscle's electrical activity from the surface of the skin and thus reflects the generation and propagation of composite action potentials, which is the collective action of motor units (Scheme et al., 2011; Farina and Aszmann, 2014; Geng et al., 2016; Athavale and Krishnan, 2017). sEMG control of prosthetic hands refers to a set of techniques of extracting the available information from sEMG signal of the upper limb and applying it to drive external device. The process of hand movement is not instantaneous. With regard to hand movements, skeletal muscle contraction can be mainly defined as two types: dynamic and static. The former involves the change of muscle fiber shape and the motions of upper limb joint, while the latter involves the invariance of muscle fiber and upper limb joint (Englehart et al., 2001; McGill, 2004; Gusman et al., 2017) (see Figure 1). Corresponding, the sEMG signals can be regarded as a random process and can be termed as two states: transient and steady state, which can be used for detecting the motion classes (Hudgins et al., 1993; Atzori et al., 2014).
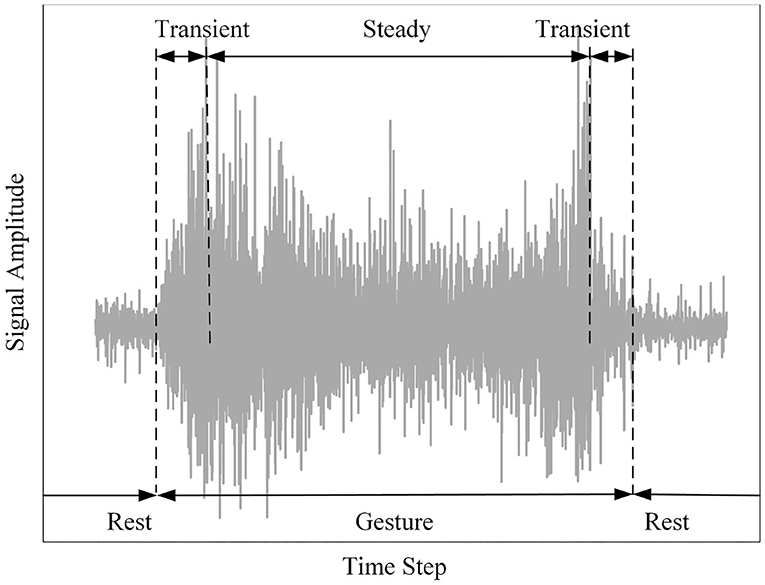
Figure 1. The surface electromyography (sEMG) data of a gesture.
The prosthetic hand is a product of human centered design. Since sEMG signal is bioelectrical signal generated by the interaction between human body and nervous system, the mode of sEMG signal depends on both the user's subjective intention and the interaction environment. Understanding how humans use their hands and how prosthetic hands are used in daily life is the key to designing prosthetic hands. The upper limbs of the human body, including the upper arm, elbow, forearm, wrist, and hand, have 20+ DOFs. The muscle mass of the upper limb is usually small and slender, and the muscle strength is relatively weak, so the sEMG signal amplitude of the upper limb is small, which increases the difficulty of sEMG analysis. It is still unrealistic to recognize flexible upper limb motion based on sEMG signal of several muscles, so it is necessary to simplify and reconfigure the upper limb movement during activities of daily living (Yang et al., 2014). At present, the focus of recognition is the hand movement. Among the taxonomies proposed so far, the GRASP taxonomy is a widely recognized classification method, which is directly for the study of hand movement (Feix et al., 2009, 2016). The hand grasping is divided into 33 categories according to four parameters, including thumb position, power type, opposition type, and virtual finger assignments. On the basis of activities of daily living, work operation needs, kinematic state, and force distribution (Bullock et al., 2013; Vergara et al., 2014; Abbasi et al., 2016; Llop-Harillo et al., 2019) proposed several similar dominant gesture categories, such as cylindrical grasp, oblique palmar grasp, hook grasp, lumbrical grasp, power-precision grasp, precision grasp, pinch grasp, tripod, pulp pinch, lateral pinch, and non-prehensile grasp. According to the way of interaction with external objects, Averta et al. (2020) divided upper limb movements into three categories: intransitive, i.e., gestures, transitive, i.e., motion interacting with an object, tool-mediated, i.e., motion of interaction between objects.
Generally, prosthetic hand has made significant progress, which can meet the basic needs of amputees. However, most control strategies follow the same operating principle: non-pattern recognition and pattern recognition. The traditional non-pattern recognition methods are usually used and limited to on/off control, threshold control, and proportional control (Belter et al., 2013; Hong Liu et al., 2016). sEMG pattern recognition techniques have broken through the limitation of non-pattern recognition and increased the dexterity of prosthetic hand. sEMG pattern recognition is to extract multi-dimension features from sEMG signals, rather than relying entirely on EMG amplitude, which is usually used in non-pattern recognition. A mature prosthetic hand design includes motion patterns and related motion trajectories. Thus, the control algorithm needs parameters, such as motion mode, motion orientation, and kinematics. The pattern in sEMG contains abundant information about the motion intention. Once the sEMG signals of the expected motion intention are classified by pattern recognition, the prosthetic hand would receive the command to perform the corresponding action. Therefore, pattern recognition techniques can make it easier for amputees to control their prosthetic hands.
To transform the complex and highly variable information of sEMG signal into useful control signal of prosthetic hands, advanced data analysis and pattern recognition techniques that can describe and analyze big data are needed. The sEMG pattern recognition techniques can be achieved with two primary processing methods: machine learning (ML) and deep learning (DL). ML, which is the method based on feature engineering, could learn and perform tasks from the data input of automatic modeling. For conventional machine learning algorithms, there are limitations in processing raw data, because they could not effectively train on inconsistent, noisy, abstract, and high-dimensional data (Wang et al., 2019). Meanwhile, a large number of studies show that the performance of sEMG pattern recognition relies heavily on heuristic hand-crafted feature. DL, which is the method based on feature learning, is a branch of machine learning. The feature of DL lies in its hierarchical model architecture. The model architecture with deep layers could extract high-level feature information in multiple representative layers and hidden layers (Côté-Allard et al., 2020). These computational models allow feature extraction and model building procedures to proceed simultaneously, so that features can be learned automatically without hand-crafted, which is more suitable for complex gesture recognition (LeCun et al., 2015; Naik et al., 2016). It has performed excellently well in the development of intelligent systems, including image recognition, machine translation, speech recognition, and automatic driving. In recent years, more and more physiological signal analysis and processing have begun to take advantage of DL, which motivated the study of DL in pattern recognition of sEMG (Atzori et al., 2016; Du et al., 2017; Zhai et al., 2017). Parajuli et al. (2019) reviewed the application of machine learning in sEMG pattern recognition of prosthetic hand. It found that almost all the data used by traditional ML methods come from steady-state signals, but the sEMG signals generated by gestures in daily life are transient. Transient-state analysis is a very challenging task suitable for DL processing.
Although pattern recognition techniques have been applied to sEMG research for decades, DL has only been applied in recent years. With the emergence of large sEMG data sets and the latest development of optimization algorithm, DL has shown brilliant prospects in the field of sEMG pattern recognition for prosthetic hand. At present, there are many basic researches on gesture recognition based on sEMG and DL. However, as far as we know, there is no literature review on these gesture recognition models. Based on the investigation of related papers in recent years, this review makes a comprehensive analysis of the application of DL techniques in the field of prosthetic hand based on sEMG, including the commonly used DL model for upper limb motion intention prediction, the advantages of DL model, and the performance level for system verification. The contribution of this review is mainly in three aspects: (1) we comprehensively analyze the overall structure of DL in sEMG-based gesture recognition; (2) we comprehensively review the latest methods and technologies of sEMG based gesture recognition; (3) we raise the existing challenges and promising research prospects of sEMG based on motion intention recognition in prosthetic hand field.
2. Pattern Recognition-Based sEMG
The approaches of gesture recognition model are very similar, but the method of each stage is different; in addition, not all studies use all stages of standard structure. Considering this, we propose a standard approach composed of six parts, which are data acquisition, data preprocessing, feature extraction, classification of patterns, post-processing, and performance evaluation. Figure 2 shows the six stages of the standard approach of sEMG signal pattern recognition based on DL.
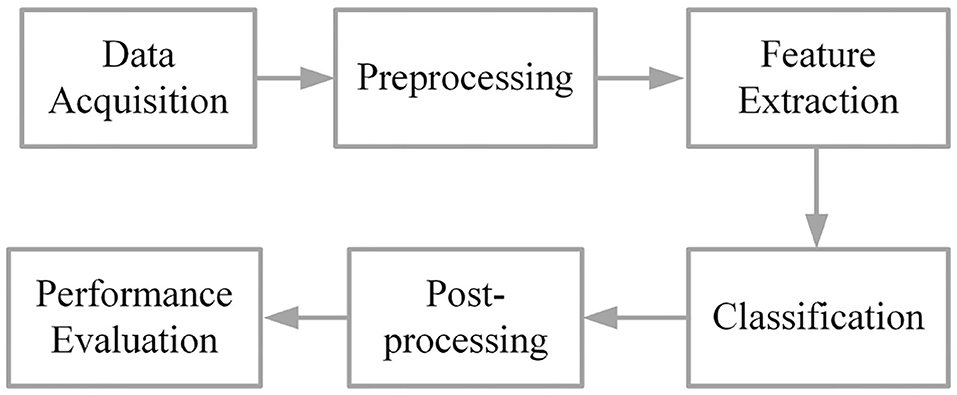
Figure 2. The six stages of the standard structure of the model.
2.1. Data Acquisition
The sEMG signals are collected from sEMG sensors, which could adopt two different acquisition criteria, sparse multi-channel sEMG and high-density sEMG (HD-sEMG), in the density of the employed electrodes of view (Costanza et al., 2007; Saponas et al., 2010; Patricia et al., 2014).
The sparse multi-channel sEMG generally takes an accurate anatomic localization strategy over the muscle (Castellini et al., 2009). In this configuration, only several paired sensors are placed over the muscles, so gesture labels are usually assigned to sEMG. NinaPro is a typical public database for this configuration, which contains most gestures needed in daily life (Atzori et al., 2014). And there are two modeling methods: extracting feature combination in the light of time window or temporal modeling based on sequence information. HD-sEMG is a dense sampling approach, which is the recording of a high channel count of spatially and densely distributed sEMG electrodes and allows measurement of the spatial distribution of motor unit action potentials. Using this technique on, and around, the forearm allows the detection and classification of multiple muscles interaction as present in gesture recognition problems with a single easy-to-install array of electrodes (Fukuda et al., 2003; Tenore et al., 2009; Li et al., 2010b). CapgMyo and csl-hdemg are two typical open databases of HD-sEMG (Amma et al., 2015; Geng et al., 2016). In this category, the instantaneous value can represent the measured value of a specific muscle activity during the transformation process, so the sEMG signal window can be converted into feature vector or HD-sEMG map. The spatiotemporal distribution of sEMG activity can be gotten.
Both categories have advantages and disadvantages. Sparse multi-channel sEMG have less data to transfer and low cost of hardware resources; however, it is very sensitive to the domain change of sEMG signal, which is the inherent characteristic of sEMG signal. In contrast, HD-sEMG captures the spatial and temporal distribution of motor unit action potentials in muscles through a two-dimensional array of electrodes. This technique increases the amount of data collected and has high recognition efficiency and control quality. For DL, the final prediction results are immediately affected by the quality and quantity of inputs, so the application of HD-sEMG seems to be an effective method to solve myoelectric control problems (Donovan et al., 2018; Nougarou et al., 2018; Tam et al., 2020). However, the increase in the number of electrodes means more complex analog front-end and processing facilities, and additional computing requirements brought by processing algorithms, which depend on the development of hardware devices.
2.2. Pre-processing
The sEMG signal is a multi-channel biomedical signal, its data recording is easily affected by the external environment, biological tissue interference, muscle fatigue, electrode displacement, so there is a lot of noise and non-stationarity, which may obscure important information about muscle electrical activity. When the sEMG signals need to be processed by pattern recognition technique, sEMG signals needs to be converted into input signals suitable for feature extraction or DL. Reliable preprocessing techniques are essential for extracting serviceable information in the next step of the analysis. Before motion recognition, the following three steps of preprocessing are usually used: smoothing, normalization, segmentation (Farina et al., 2004, 2014b; Ma et al., 2020).
2.2.1. Smoothing
sEMG is a noisy signal. This means that the probability distribution of the sEMG changes with time. And we can reduce the non-stationarity of sEMG by smoothing, which generally uses the following two steps: rectification and filtering.
Rectification: In this, there is a positive and negative voltage in the sEMG signal, due to the repolarization and depolarization of muscle fibers.
Filtering: It is used to discard noise and extract essential information. Based on the Nyquist–Shannon sampling theorem, since about 95% of the sEMG signal power is concentrated at 400–500 Hz (Clancy et al., 2002; Li et al., 2010a), the lowest sampling frequency of the sensor must be more than twice the highest frequency of the sEMG (Ajiboye and Weir, 2005; Chu et al., 2006). Meanwhile, the filter also uses low-pass filtering method, or moving average method is used, which could be regarded as a special low-pass filter. For moving average method, some features (such as MAV, ARV, or RMS) are computed by windowing the signals, and then to average the features of all channels, or compute directly the features of the average of all channels (Benalcázar et al., 2017).
2.2.2. Normalization
The sEMG signals from different subjects, even different sessions, have enormous differences. In order to compensate for these differences, it is necessary to normalize the data (Ma et al., 2020). Normalization refers to the current amplitude was converted to a percentage of the original or smoothed sEMG amplitude (Clingman and Pidcoe, 2014). The advantage of normalization is that it is simple and accurate, the result has nothing to do with repeatability, and it can improve the accuracy of the model. The disadvantage is that all components analyzed must be fully peaked and separated in the same session (Farina et al., 2010).
2.2.3. Segmentation
The segmentation stage consists of two sections: gesture detection and sliding windowing.
In order to speed up training and improve the accuracy of prediction, it is usually necessary to detect the region of the sEMG corresponding to gesture, in other word, muscle activity, and removing signals where the muscles are rest. A threshold should be determined, and then all the instants greater than or equal to the threshold are extracted from the smoothed signal. The first of these instants is the beginning of the muscle activity region, and the last instant is the end of the activity region (Zhang et al., 2011, 2020; Benalcázar et al., 2017; Qi et al., 2020). As depicted in Figure 3, CH1-8 are eight channel sEMG signals, and S2 is the standard deviation of eight channel sEMG signals calculated by moving average method.
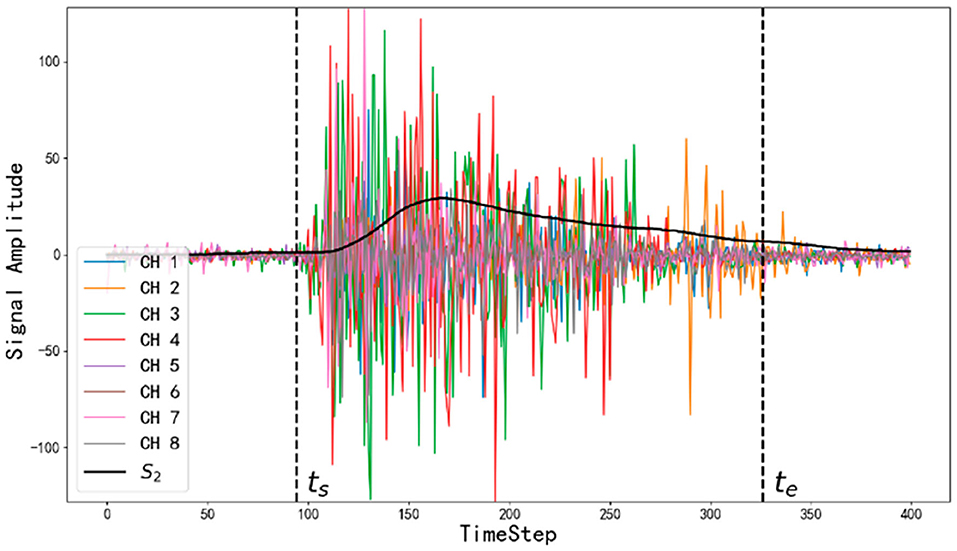
Figure 3. The curves of surface electromyography (sEMG) and the motion detection result (Zhang et al., 2020).
In the field of prosthetic hand sEMG control, the optimal sliding window length can guarantee the minimum classification error with suitable controller delay (Hudgins et al., 1993). Too long sequence may cause system long processing delay, while too short window may not contain enough useful information. For a reliable prosthetic hand control system, the maximum allowable delay between signal generation and drive command generation should not exceed 300 ms (Hudgins et al., 1993). Study in Englehart and Hudgins (2003) show that 150–250 ms windows for sEMG are the best for mechanical sensors. Nielsen et al. (2011) proved that the performance of the system will decline when the sliding window length is <100 ms. Windows may be either disjoint or overlapped. Real-time continuous classification not only needs high classification accuracy but also requires rapid response (Huang et al., 2009). The overlapping analysis window method can accelerate the decision (Englehart and Hudgins, 2003). The key to the scheme is to set the window increments carefully. In terms of hardware processing power, overlapping analysis windows that generate fast and dense decision flows are usually preferred.
2.3. Feature Extraction
In order to achieve better accuracy and robustness, DL techniques needs not only a good algorithm but also a good input. There are two input methods: (1) traditional manual feature extraction method is used to increase the data density of sparse multi-channel sEMG; (2) the raw sEMG signal is directly input into the network to realize end-to-end learning.
2.3.1. Traditional Feature Extraction Method
For the traditional feature extraction methods, many researchers are devoted to propose new features based on professional knowledge (Khushaba et al., 2017), or to present new feature sets by analyzing existing features (Phinyomark et al., 2009, 2012a; Bi et al., 2019). The goal of feature extraction is to increase the information density implicit in sEMG signals, and improve the difference between gestures (Oskoei and Hu, 2007). The classical features contain considerable heuristic knowledge; thus, integrating these classical features with DL approaches could improve the gesture recognition performance on sparse multichannel sEMG. The existing sEMG features can be divided into four types: time domain features (TD), frequency domain features (FD), time-frequency domain features (TFD), and parameter model (Oskoei and Hu, 2008; Phinyomark et al., 2013; Jali et al., 2015; Nazmi et al., 2016).
Time domain features: The TD values are calculated directly from the raw sEMG, which are functions of time. Compared with other features of sEMG, they have low computational complexity and have been widely used. There are no <27 time domain features of sEMG, but most of them are redundant. Time domain features constantly used consist of waveform length (WL), mean absolute values (MAV), integrated EMG (iEMG), histogram (HIST), root mean square (RMS), zero crossings (ZC), standard deviation (SD), slope sign change (SSC), Willison amplitude (WAMP), variance (VAR), V-order (V), simple square integral (SSI), and so on, which are often used in combination. The detailed information is shown in Table 1.
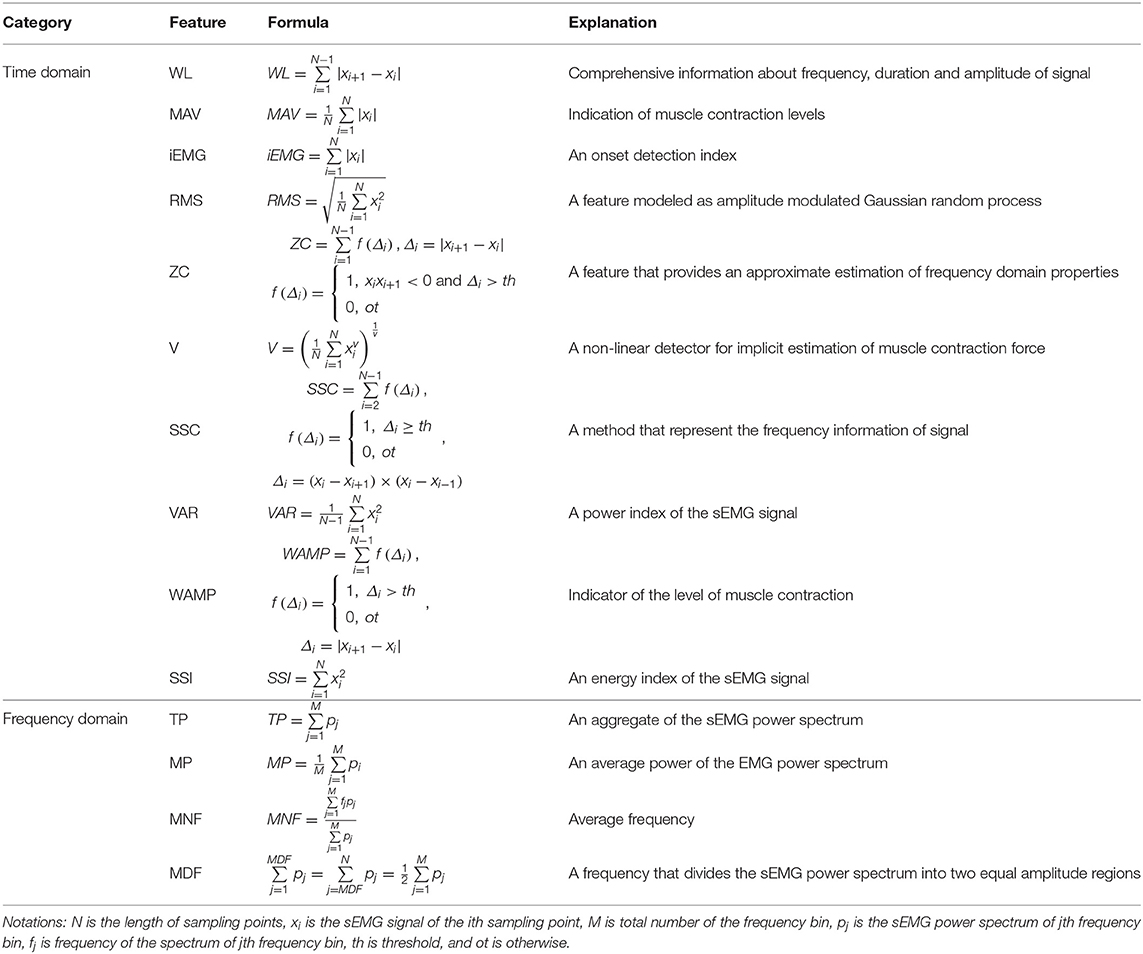
Table 1. Features according to the domain.
Frequency domain features: The FD features are calculated by Fourier transform of the autocorrelation function of sEMG signal and estimated by periodogram or parameter method. The common frequency domain characteristic of sEMG signal is frequency ratio (FR), total power (TP), mean power (MP), median frequency (MDF), mean frequency (MNF), power spectrum (PS), and so on. The detailed information is shown in Table 1.
Time-frequency domain features: The TFD features are expressed as locating the energy of sEMG signal both in time and frequency, which is usually an important approach in feature extraction. The typical representative of time-frequency analysis is wavelet transform (Joshi et al., 2015). Different wavelet coefficients constitute different frequency bands and statistical index are extracted as TFD features. When db4 is used as the wavelet basic function, the raw sEMG signal is decomposed with the level of 3 and the wavelet transform equation is defined as:
where a is the scale parameter, ψ(t) is the mother wavelet, and τ is the translation parameter. ni is the length of the ith level decomposition coefficient ci (ci = one of [cD1, cD2, cD3, cA3]); μ is the mean of ci (Liang et al., 2019). In this case, the typical TFD features include mean of the absolute coefficient ci (MOACi), average power of the coefficient ci (APOCi), standard deviation of the coefficient ci (STDOCi), ratio between MOACi+1 and MOACi.
Parameter model: The basic principle of the parameter model is to regard it as a time series based on sequence information in the raw sEMG. Because sEMG signal is steady on short notice, the coefficients and intercept of the fourth-order autoregressive model are often selected as the characteristic values (Phinyomark et al., 2012b).
2.3.2. sEMG Image
Inspired by the spatiotemporal characteristics implied in the HD-sEMG and the end-to-end learning characteristics of DL, the method of hand gesture recognition using the sEMG image formed from the raw sEMG was proposed. The two-dimensional array distribution of electrodes in HD-sEMG allows us to analyze sEMG information in spatial domain, which makes it possible to analyze sEMG signals using image processing techniques. The pixels of sEMG image can be defined by the distribution of electrode array, that is, the row and column of electrode. This creates an image with size L × W × H, where L is the number of frames and the number of color channels of the sEMG image, W is rows of the array electrode and the width of sEMG image, and H is columns of the array electrode and the height of sEMG image (Geng et al., 2016). There are four kinds of image representation methods of raw sEMG signal, which are composed of raw-image, signal-image, activity-image, and feature-signal-image (Hu et al., 2018). The input of these method is a time-window sEMG signal whose size is L × C, where L is the length of the time window or the number of color channels of sEMG image, and Cis the number of signal channels or the height of sEMG image. The raw-image method is gained by transforming the input signals into images with size L × W × C or W × L×C, where W is the width of sEMG image and width×height = signalchannels (Atzori et al., 2016; Zia ur Rehman et al., 2018b). The signal-image is obtained by realigning the information of each channel with size L×W×C or W × L × C. The activity-image is formed by fast Fourier transformation of signal-image with size L × W × C or W×L×C. The feature-signal-image is based on the signal image to process the traditional feature extraction method for each channel signal, whose size is F × L × C, where F is feature set selected and featuredimension = signalchannels × featurevectordimension. Figure 4 is a representation of the first three sEMG images. An instantaneous sEMG image is a single sample of a motor unit action potential distribution under an electrode grid at a specific time, which could reduce the time required to process the signal. The number of instantaneous sEMG images captured per second is the sampling frequency in time.
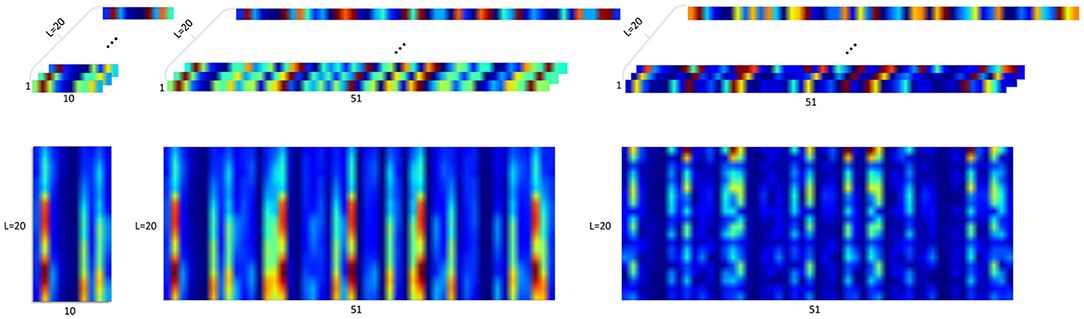
Figure 4. Three surface electromyography (sEMG) image representation methods based on raw signal (Hu et al., 2018).
2.4. Classification
2.4.1. Convolutional Neural Network
Convolutional neural network (CNN) is the most extensive applications for DL architecture based on sEMG gesture recognition. Park and Lee (2016) proposed a user-adaptive CNN model, which is the first DL-based architecture applied to sEMG signals, to classify data from the Ninapro database resulting in a better classification accuracy and robustness of variability compared to support vector machine. Atzori et al. (2016) introduced a modified version of the well-known CNN architecture, called LeNet, to classify an average of 50 hand movements in NinaPro database. The results show that CNN could produce more accurate classification accuracy compared to traditional techniques (Linear Discriminant Analysis, Support Vector Machine, and k-Nearest Neighbor). Consider the correlation between specific muscles and gestures, Wei et al. (2019) adopted a “decomposition-and-fusion” approach for gesture recognition based on sEMG, which was called two-stage multi-stream CNN strategy and proved that the performance of multi-stream CNN is better than random forest and simple CNN. Chen J. et al. (2020) took advantage of 3D CNN in processing the data that was implanted in the finger movement to process HD-sEMG. Due to too many parameters of CNN model, Chen L. et al. (2020) designed a compact network structure, which cannot only effectively reduce the complexity of the model but also improve the accuracy of prediction. Based on several fundamental factors, such as pre-processing, hyperparameters, and network structure, Park and Lee (2016), Tsinganos et al. (2018), Asif et al. (2020), Chen L. et al. (2020), and Triwiyanto et al. (2020) studied the techniques of optimizing the performance of CNN model. There are other CNN-based researches for sEMG center at improving the scalability of the model through domain adaptation (Du et al., 2017) or self-recalibrating classification (Kyranou et al., 2018). CNN also performs well in synchronous sEMG recognition (Ameri et al., 2018). There are also many papers that apply CNN architecture to embedded systems (Côté Allard et al., 2016; Tam et al., 2020).
2.4.2. Recurrent Neural Network
One of the most important advantages of CNN is that it can automatically learn spatial features from input data or extract unlabeled features. However, the sEMG is the form of time series signal essentially, which is more suitable for recurrent neural network (RNN) that has dominant position in processing temporal or otherwise sequential information (Hu et al., 2018). Simao et al. (2019) compared the performance of RNN and feed-forward neural network (FFNN) on the recognition of hand gestures. It is proved that the dynamic models (RNN) with fewer parameters can achieve similar accuracy to the static model (FFNN), and the training and inference time is shorter. He et al. (2018) propose a model combining long short-term memory (LSTM) network and multiplayer perceptron (MLP) for feature learning and classification of sEMG signals. The former captures the temporal dependence of sEMG signals, while the latter focuses on static characteristics. The accuracy of motion classification is improved by constructing a feature space containing dynamic and static information of sEMG signals. Nasri et al. (2019) studied the performance of gated recurrent unit (GRU) in hand gesture recognition approaches for first time. Zhang et al. (2020) proposed a novel RNN model with short delay for gesture recognition, which could generate an instantaneous prediction after the start of gesture motion at each sampling time step. RNN is also widely used for continuous limb motion estimation (Bengoetxea et al., 2014; Xia et al., 2018; Wang et al., 2020).
2.4.3. Combination of CNN and RNN
The hybrid CNN–RNN architecture can obtain excellent performance in spatial and temporal features, while CNN or RNN can extract only one kind of feature of sEMG. Hu et al. (2018) directly connected LSTM and CNN into a unified structure, and utilized the raw sEMG as input signal for dynamic recognition of gestures. Wu et al. (2018) proposed LCNN model, which first leveraged LSTM to preserve the temporal information of sEMG to reduce the loss of temporal information, and follow CNN was used to extract spatial feature information. Tong et al. (2019) introduced a dual-flow network structure. The upper layer was a multi-layer CNN structure, and the lower layer was composed of multiple LSTMs. By learning the fusion information of the two layers, the model can extract the spatiotemporal features efficiently.
2.4.4. Temporal Convolutional Network
In order to obtain higher classification accuracy and lower performance degradation in multi-day sessions, DL models often have many layers and neurons, and are based on complex architecture (Bahador et al., 2020). Recently, temporal convolutional network (TCN) has been gradually applied to the research work for sEMG-based gesture recognition, which takes advantage of a one-dimensional convolution layer running along the time dimension to learn the time dependence of a given input signal. Betthauser et al. (2019, 2020) utilized the history of sEMG signals to discover the temporal features, which improves the accuracy and stability of motion intention prediction, especially during the transitions between classes. Tsinganos et al. (2019) achieved high accuracy that surpasses the result obtained with CNN on the 53 classes tasks. Zanghieri et al. (2020a,b) apply TCN to embedded devices and prove that the performance of TCN is better than the classical ML method in terms of the limited power budget and computing resources.
2.4.5. Unsupervised Learning
The methods mentioned above, including CNN, RNN, and TCN, are all supervised learning approaches. In the pattern recognition techniques based on sEMG, these approaches are dominant; however, unsupervised learning methods have been gradually applied to this field in recent years. The application of supervised learning involves a labeled training dataset, while unsupervised learning approach has minimal or no requirement for data labeling, potentially reducing human errors in annotation. At present, unsupervised learning approaches in DL techniques are mainly divided into two categories: one is autoencoders (AE), whose goal is to recover the original data as lossless as possible from the abstract data; the other is probabilistic restricted Boltzmann machine (RBM) and its improved algorithm deep belief network (DBN), whose goal is to maximize the probability of the original data appearing when the RBM reaches a stable state. AE are data compression algorithm, which use efficient data encodings to map noisy input data into clean output (Le, 2015). Vujaklija et al. (2018) used AE and advanced industrial control algorithm to realize the sEMG control task of upper limb with 2 DOFs, which effectively proved that the performance of AE slightly outperformed the state-of-the-art factorization algorithms, i.e., non-negative matrix factorization. Zia ur Rehman et al. (2018a) evaluated the performance of AE and LDA using multi-session sEMG data from the healthy and amputees, and proved that AE could significantly improve the performance of the pattern recognition techniques based on sEMG. Zia ur Rehman et al. (2018b) compared CNN and AE on a multi-session dataset. The results showed that AE outperformed CNN in intra-session analysis, but CNN had stronger robustness and higher computational efficiency. DBN is a generation model composed of explicit neurons and implicit neurons, in which the former are used to receive signal input and the latter are used to extract features. By training the weights of each neuron, it can automatically learn features to realize signal recognition and classification. Shim and Lee (2015) proposed using DBN to recognize multi-channel EMG signals, and found that the classification performance of DBN was better than LDA, SVM, and BP. Zhang J. et al. (2019) developed DBN to deal with the non-linear and time-varying properties of sEMG signal, and proved the potential of DBN through the measured data. Although one of the advantages of unsupervised learning is that it eliminates the need for manual tagging, self-training strategy is likely to increase classification errors, especially with data distribution mutation (Huang et al., 2017; Côté-Allard et al., 2020).
2.4.6. Other DL Methods
Apart from the above methods, there are many other DL methods applied to sEMG pattern recognition. Because of the simplicity of the structure, fully connected neural networks (Neacsu et al., 2019), BP neural network, and artificial neural network (ANN) (Mane et al., 2015; Liu et al., 2017; Yang and Zhang, 2019; Zhang Z. et al., 2019) are also commonly used for offline and real-time identification of sEMG. Time delay neural network (TDNN) is an established neural network architecture for time series processing. TDNN uses tapped-delay lines to process the temporal range of key features in the input signal to provide a short-term memory that can be fed into the traditional feed-forward network architecture (Waibel et al., 1989). TDNN has two advantages. First, it does not rely on repeated isometric contractions and can be used to identify instantaneous muscle contractions based on natural motion. Second, it can recognize the motion of 2 DOFs at the same time (Smith et al., 2009). TDNN processing of combined with sEMG and kinematics data could show excellent performance in the prediction of simultaneous motion of shoulder joint and elbow joint (Kwon and Kim, 2011; Blana et al., 2016; Day et al., 2020). Since the quantity of training datasets in DL affects the performance of the model, the limited datasets collected from multiple topics should be first extend by certain data-augmentation approaches that can also enhance the robustness of the model (Tsinganos et al., 2018; Yang et al., 2018; Côté-Allard et al., 2020). Moreover, due to the nature of the training in a neural network, the process of transfer learning is very straightforward (Yosinski et al., 2014; Côté-Allard et al., 2019). Table 2 presents a summary about the structure of some models in this review.
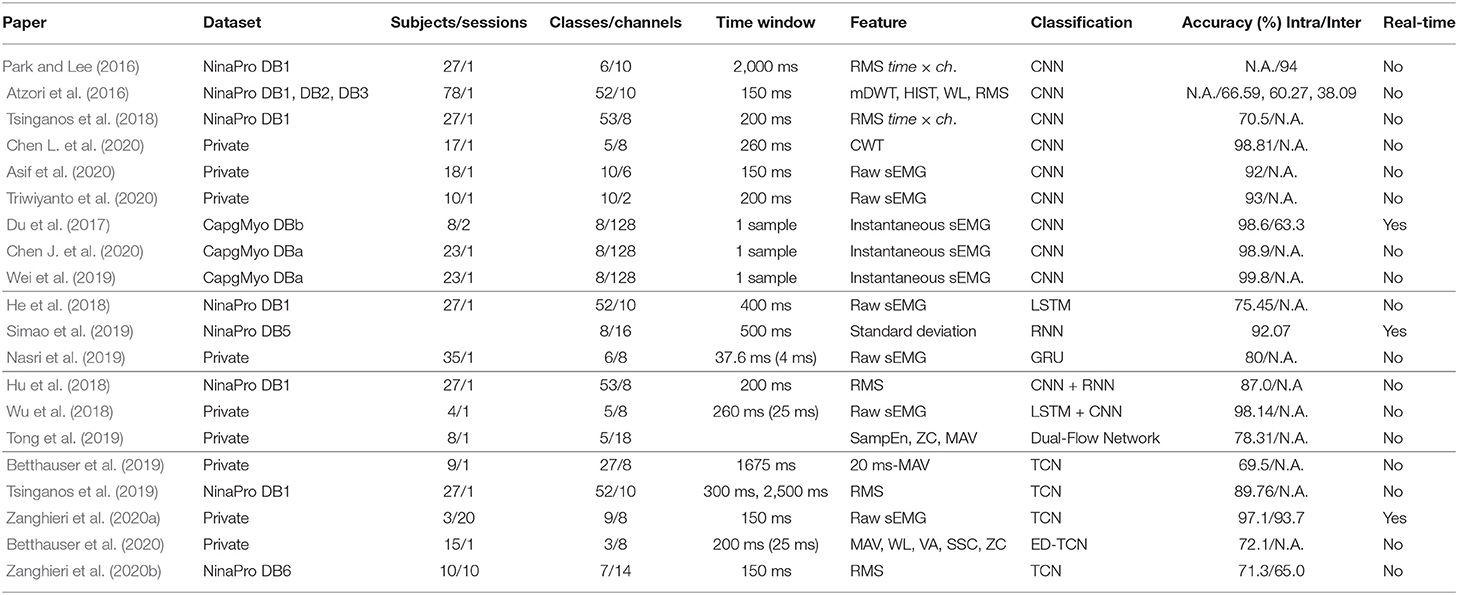
Table 2. Standard structure used by the selected models.
2.5. Post-processing
In recent years, a massive amount of research on the robustness and usability of sEMG control system. The post-processing techniques play a very important role in this condition (Yu et al., 2020). When the classifier is used to decode sEMG signals from different finger movements, the post-processing techniques are usually used to prevent the prosthesis controller from being overloaded due to a host of classification instructions, and to gain better performance of the classifier by eliminating the wrong classification caused by unexpected actions (Englehart and Hudgins, 2003; Zhang et al., 2017; Samuel et al., 2019). The commonly used post-processing techniques could be roughly divided into three categories. The first strategy is to use multiwindow joint decision-making, which is based on the consistent decision of continuous multi-windows to correct some window errors. This method includes majority vote (Tam et al., 2020), elimination of consecutive repetitions (Benalcázar et al., 2018; Simao et al., 2019), threshold (Chung and Benalcázar, 2019; Yang and Zhang, 2019), and Bayesian Fusion (Khushaba et al., 2012). The second strategy is to use the confidence score to determine the decision, i.e., to improve the classification accuracy by rejecting unreliable decisions (Scheme et al., 2013). The third is to tolerate some error classification directly and adopt special control strategy to reduce the influence of error decision (Simon et al., 2011).
2.6. Performance Evaluation
2.6.1. The Metrics Used to Evaluate Models
The accuracy of prediction generally is one of the leading criterion that is employed to evaluate the functionality of a pattern recognition model. However, when evaluating the performance of the whole pattern recognition techniques based on sEMG, more factors should be considered. In offline testing, the performance of the model is generally evaluated by accuracy, recall, precision, standard deviation, etc. (Mane et al., 2015; Benalcázar et al., 2018; Chung and Benalcázar, 2019; Yang and Zhang, 2019; Zhang Z. et al., 2019). And these measures usually are classified as error measures, such as mean square error (MSE), root mean square error (RMSE), normalized root mean square error (NRMSE), and correlation coefficient (R) (Wang et al., 2020). The mathematical equations of these measures and their significance in the model are listed in Table 3. According to these metrics, the results may be biased for two reasons: when the prediction results of the model determine what gesture was carried out and when was executed and by whom, the prediction is regarded as true affirmation, but in the actual system, only what gesture when was executed is considered. In addition, the data of each category and each generator in the test set of the model should be balanced, otherwise the accuracy of the model will tend to be the same as that of the subjects with more data. When building the real-time model, the system performance measurement can measure the accuracy of the complete system in real time. These measures are based on Fitts' law (Fitts, 1954), which is used to measure the prediction model of the target performance of the designed system (Kamavuako et al., 2014; Wurth and Hargrove, 2014; Ameri et al., 2019; Waris et al., 2019; Xiao et al., 2020). These performance indicators include six metrics, such as overshoot, throughout, path efficiency, completion rate, average speed, and stopping distance (Table 4).
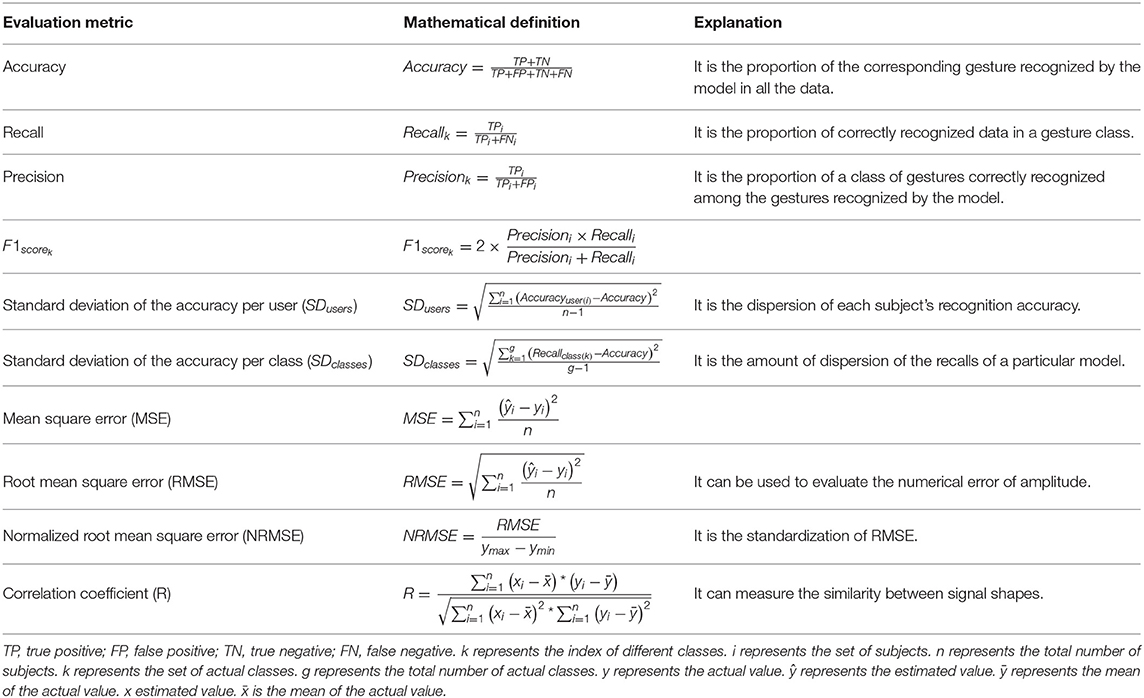
Table 3. The commonly used offline performance metrics.
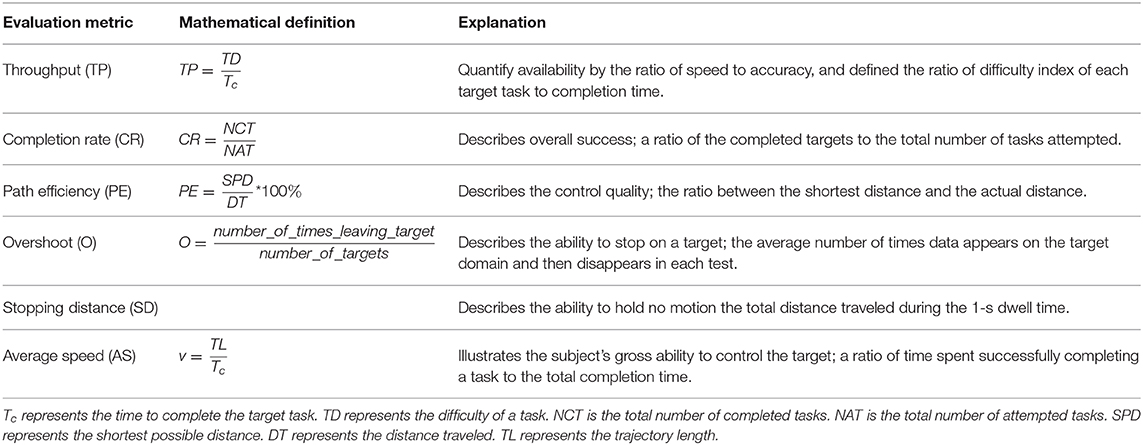
Table 4. The commonly used real-time performance metrics.
2.6.2. Multi-Session Evaluation
The traditional experiment design often uses the ideal data-acquisition protocol, that is, in a conversation experiment, the subjects are asked to repeat the same gesture many times in the same session. In this case, the electrodes of sEMG sensor are kept in the same position, but the differences of time, environment and subjects in clinical and practical application are seldom considered, especially the influence of electrode insertion and removal (Yang et al., 2019). These factors would lead to different distribution characteristics of sEMG sensors data in different sessions, resulting in performance deterioration significantly with the change of sessions, and limiting the long-term use and reliability of sEMG pattern recognition techniques (He et al., 2015). The evaluation of pattern recognition techniques should not only be based on performance and computational load but also consider robustness and adaptability. From the point of view of DL, the variability in inter-session and inter-subject would lead to domain shift of the data collected by sEMG sensor, i.e., the training data and test data used by the algorithm have different distributions. The solution to this problem is to develop a new learning algorithm that can realize domain adaptation (Du et al., 2017). Domain adaptation has attracted more and more people's interest and showed a broad application prospect. In the training, when there is plenty of unlabeled data in the target domain, the existing methods generally adopt the strategy of fine tuning the pre-training model. There is also another unsupervised adaptive learning approach, which could use unlabeled target data for learning. In terms of the variability of data, the robustness and adaptability of sEMG pattern recognition techniques could be improved by multi-session evaluation, which have been usually divided into three situations (see Figure 5):
• Intra-session: Here, the model is evaluated and trained using the data from different trials in the same session of the same subject, with the electrodes not removed (Palermo et al., 2017).
• Inter-session: Here, the model is evaluated on the data from the same subject but different sessions used in the training, with the electrodes reattached (Zia ur Rehman et al., 2018b; Waris et al., 2019).
• Intra-subject: Here, the model is evaluated and trained using the data from different subjects (Ketyko et al., 2019).
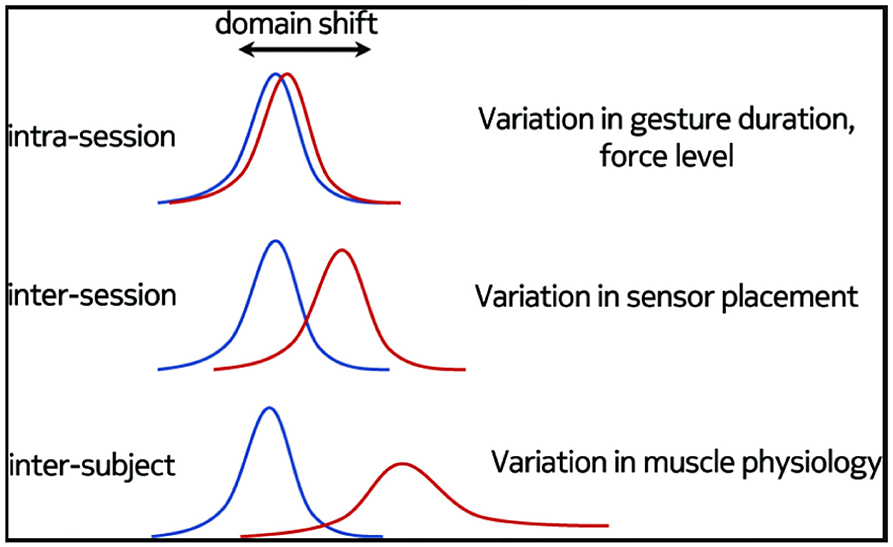
Figure 5. Causes of variability of data distribution (Ketyko et al., 2019).
3. Hand Gesture Recognition Challenges
In recent years, sEMG signal recognition based on DL has developed rapidly, but most of these applications are confined to improve the accuracy of offline classification and laboratory online testing, which have not been implemented in commercial systems, and even far from the real-life scenario of users. The huge gap between academia and business in this state-of-the-art technique field stems from the fact that the business community puts the actual needs of users in the dominant position of research, with clinical needs as the main purpose (Powell and Thakor, 2013; Vujaklija et al., 2017). This review has investigated the research trends in the application of DL to gesture recognition based on sEMG. We can discover that the achievements are outstanding, but there are also many challenges, which could be summed up in four categories.
3.1. Signal Acquisition and Processing Devices
The real-time and compactness of the prosthetic hand are the key factors affecting the user's satisfaction with the device and the use time (Biddiss and Chau, 2007), which improve demand of the requirements of sEMG data acquisition, storage, and processing. In the sEMG pattern recognition techniques of prosthetic hand, the traditional sEMG sensors can be divided into wet and dry electrodes. Wet electrode is the most commonly used electrode in clinical application. The electrode uses electrode gel for motor fixing and high-quality signal acquisition, and has good skin electrode coupling property. But there are also some shortcomings in practical application. The electrode gel may dry with time, thus changing the contact resistance between the electrode surface and skin interface. The electrode adheres to the skin and may cause skin irritation, allergy, and abrasion of the outer skin layer (Merritt et al., 2009; Pylatiuk et al., 2009). The electrode is also inconvenient to be placed in the socket of prosthetic hand (Vasluian et al., 2013). These limitations would make the currently available prostheses uncomfortable to wear and inconvenient to use. Relatively, the dry electrode is fixed on the skin by external force, which can ensure the comfort of long-term detection and high-quality signal for subsequent analysis. However, the poor contact between the dry electrode and the skin will lead to lower amplitude, higher impedance, higher randomness, and noise of the received signal (Sun and Yu, 2016; Fu et al., 2020). Recently, textile electrode has attracted more and more attention of researchers. Compared with the former two kinds of electrode, the electrode has better ventilation, flexibility, foldability, reusability, and long-term use. However, the motion artifact and noise caused by the electrode are more (Acar et al., 2019; Lee et al., 2020).
Based on the consideration of task type, control accuracy, production cost, and calculation load, the number of electrodes needed for prosthetic hand control based on pattern recognition is 8 or more (Fang et al., 2015; Rodríguez-Tapia et al., 2020). However, sEMG only contains the signal of muscle activity directly related to gesture, not enough to reflect all the information of the gesture. In order to solve these dilemmas, some research workers have come up with many ideas, such as HD-sEMG system or multi-mode sensor system including accelerometer (Jiang et al., 2018; Rizzoglio et al., 2020), near-infrared spectroscopy (Nissler et al., 2016; Scano et al., 2019), and electroencephalogram (Li et al., 2017). Accelerometer can reflect the dynamic characteristics of muscle rotation and translation. Near-infrared spectroscopy can be used to monitor muscle condition during activity. Electroencephalogram measures information related to the activity of brain nerves. However, the signal processing in existing papers relies on additional data processing hardware, such as GPU or cloud devices, which will lead to changes in the structure and energy consumption of prosthetic hand design (Nef and Riener, 2005; Kyranou et al., 2018; Sawant et al., 2020). 5G and the IoT seems to be a viable solution (Zanghieri et al., 2020a). 5G can accelerate the speed of information transfer among devices. IoT can improve the ability of collecting and sharing data.
3.2. Offline vs. Online Processing and Performance Evaluation
A good deal of upper limb movement pattern recognition techniques based on sEMG have been carried out in offline environment with satisfactory results. However, the system with good offline training performance does not always have excellent real-time performance (Ortiz-Catalan et al., 2015; Vujaklija et al., 2017; Gigli et al., 2020). This is because offline performance is obtained by processing offline data of sEMG. Compared with the simple offline performance indicators, the real-time performance indicators consider the amputees' reaction to the output of the algorithm and adapt to its muscle contraction to improve the application effect, which can evaluate the controllability and reliability more comprehensively (Vujaklija et al., 2017). This emphasizes the necessity of real-time assessment of pattern recognition techniques, rather than offline algorithmic performance. Most of the existing literatures focus on the pattern recognition system for upper limb amputees use of the data of intact subjects. This is because limb deficiency are unlikely to affect the amputee's motor learning ability (Tenore et al., 2009; Jiang et al., 2014b; Jarrassé et al., 2017). The study of different algorithms for intact subjects can provide a lot of valuable information to help achieve better prosthetic performance (Merad et al., 2018). Even so, it is essential to utilize the data collected from amputees (Gregori et al., 2019). Intact subjects performed real movements of the hand, while amputees could only attempt imaginary movements without visual and sensory feedback, so that when they perform the same movements at a specific arm position, the residual muscles of amputated arm might produce sEMG patterns different from those of intact arm (Geng et al., 2012; Vidovic et al., 2016). When wearing a prosthesis, the amputee's elbow, shoulder, and other parts of the body would appear different degrees of compensation movement, which could affect the sEMG signal of the hand (Geng et al., 2012; Hussaini et al., 2017; Beringer et al., 2020).
3.3. Individual-Specific and Variability of sEMG Signals
sEMG, as a physiological signal of muscle activation, is non-stationary in nature. Its statistical characteristics vary with time and are affected by individual differences, external factors, and many other parameters. There are many elements that could bring about the variability of sEMG signal, including physiological reasons, such as muscle condition (atrophy, hypertrophy, or fatigue), skin conditions (perspiration, humidity) (Jiang et al., 2012); user variations due to adaptation or learning (Amsüss et al., 2013); and physical reasons, such as electrode shift (Young et al., 2011), contraction intensity changes between trials, external load caused by prosthesis weight (Cipriani et al., 2011b), and arm position change (Fougner et al., 2011). This variability makes it difficult to adapt to the robustness problem in daily life, and causes the biggest dilemma in the process of long-term use for the pattern recognition techniques (Scheme et al., 2011; Park et al., 2016; Kyranou et al., 2018). From the point of view of DL, the variability in sessions and subjects would lead to different distribution of the data collected by sEMG sensor. To address these issues, new research fields have begun to analyze the real environment and focus on the validation of clinical usability (Hargrove et al., 2017; Vujaklija et al., 2017). In the experimental design, multi-user and multi-session training protocol has been adopted. In the data processing, data augmentation schemes (Boschmann and Platzner, 2012), adaptive learning (Zhai et al., 2017; Ketyko et al., 2019), transfer learning (Côté-Allard et al., 2019), and unsupervised learning (Du et al., 2017; Huang et al., 2017; Zia ur Rehman et al., 2018b) have been widely used. While these ideas are promising and encouraging, the robustness with daily variation and potential user adaptability in a new recording session over time remains unexplored.
3.4. Simultaneous and Proportional Information
The natural motion of the hand is continuous variation in kinematics and dynamics, which requires multiple joints or multiple DOFs to move proportionally at the same time (Muceli and Farina, 2012; Bengoetxea et al., 2015). The classification generated in sEMG-based pattern recognition is discrete and limited, which cannot produce reliable proportion information. In fact, the features of a specific pattern will migrate to another mode with the change of exercise intensity, which would lead to wrong classification, so that the accuracy of classification would be affected by the proportion information (Fougner et al., 2012). At present, proportional control is mainly realized by calculating the average power of all channels after the classification decision is made, but the training process will be more complex and longer (Muceli et al., 2014; Ameri et al., 2019). Regression methods could be used to create continuous mapping from muscle to spatial kinematics instead of classifying into discrete class labels. But the method of obtaining training data, such as mirror movements, is easy for the intact subjects, while difficult for the amputees (Nielsen et al., 2011; Hahne et al., 2014). The pattern recognition techniques do not utilize the neurophysiological knowledge of natural movements acquired in the recent decades, such as muscle synergy theory, which are promising for the development of a more natural prosthesis hand (Jiang et al., 2009). According to the muscle synergy theory, the extracted time-varying activation signals would be related to the motor commands descending to the spinal cord modulating spinal interneuron modules, which are represented by the time-invariant synergy weights (Bizzi and Cheung, 2013). Through these insights, sEMG signals can be expressed as a matrix embedded with multi-dimensional neural control information. Continuous mapping can also be realized by signal factorization, the principle of which is to extract the so-called collaborative weight and activation signal from the sEMG records (Jiang et al., 2009, 2012). There is a special factorization called non-negative matrix factorization (NMF). So far, the factorization method has been able to identify an enormous variety of motor neuron activities in voluntary upper limb movement, but it performs well in isometric contraction at constant or slowly changing forces, and its performance is limited under non-stationary conditions (Kapelner et al., 2018). Blind source separation is a factorization method different from NMF, which decomposes the recorded sEMG signal into the individual spike trains of motor neurons (Negro et al., 2016; Farina et al., 2017). The blind source separation based on convolution kernel compensation has been broadly tested (Glaser et al., 2007; Holobar and Zazula, 2007), and implemented online recently (Glaser et al., 2013). Another potential method is to decode motor neuron spike trains directly from sEMG signals and transform them into simultaneous and proportional information (Farina et al., 2014b; Levi et al., 2018). In this method, the sEMG signal is first encoded as spikes, and processed to recognize the gesture. After that, the activation signal is used to trigger the oscillator to generate motor commands for motion. Therefore, the muscle activity is directly mapped to the prosthetic hand kinematics (Pani et al., 2017; Vasquez Tieck et al., 2019).
4. Future Development of Gesture Recognition
The natural communication between human body and artificial hand is established from the perspective of human physiology, which is the development direction of intelligent prosthesis hand (Castellini et al., 2016). sEMG signal is a reliable method to predict human motion intention in prosthetic hand control system, because it does not require the special attention and professional skills of amputees, and the external environment interference factors will not affect its production. The prediction of upper limb motion intention based on sEMG and DL have broad application prospects. We believe, for the foreseeable future, that pattern recognition based on DL has high possibility to develop in these directions.
First of all, with the emergence of new sEMG sensors, we would use low-power analog front-end and microprocessor to develop high-precision wearable sEMG signal acquisition system, even HD-sEMG acquisition system. This would combine the flexibility of the system with good signal quality and keep a good balance between power consumption and computing power. So that the spatial resolution of sEMG signal is improved under the condition of limited resources, and fine motion recognition is realized.
Second, more open source databases would be established. These databases would include amputee data, high-quality data, musculoskeletal data, complete muscle measurement point data, upper limb kinematics data, and various application scenarios, which would promote the algorithm research of sEMG signal and attract more people to join the field of human–computer interface of prosthetic hand. Standardized sEMG acquisition protocol should be set up to further reduce the difficulty of independent experiments. Simultaneously, it is necessary to evaluate the feasibility of sEMG signal recognition and sEMG control strategy from the clinical point of view.
Third, with the further research of human joint motion and other physiological signals and the continuous development of multi-sensor fusion technique, gesture recognition based on sEMG will be paid more and more attention. Other sensors that could obtain the information of external environment or other physiological information and sEMG can complement and adjust each other to reduce the signal processing time (Fang et al., 2020). At the same time, through the appropriate mapping strategy, the calibration and refinement between different signals can be realized, which can directly reflect the process of hand movement. The multi-sensor fusion technique and the pattern recognition techniques based on DL are combined to provide the key information of continuous control for HCI interface, improve the accuracy of pattern recognition, and meet the requirements of robust recognition performance.
Fourth, the biggest problem of using DL techniques to process sEMG signal might be the absence of large-scale, labeled training data sets and resource constrained hardware platform. It is not easy to simply focus on collecting large data sets and expanding hardware resources. Instead, researchers should focus on developing techniques that make more efficient use of existing data sets. These techniques have two main directions. On the one hand, transfer learning techniques are used, so that models trained for specific scenarios can benefit from other essentially similar fields. On the other hand, different classifiers are integrated to realize the integration of different training models. When these models are combined together, more data variability would be captured in the training process, resulting in enhanced modeling ability.
Fifth, a novel functional evaluation protocol should be established. The sEMG pattern recognition model applied to prosthetic hand is used by amputee. Therefore, the evaluation of the model should consider the purpose of the use more, that is, what amputee can do now (which can be measured directly in the laboratory), what amputee can do after training (which is a reflection of behavior in life and working environment) (de Vet et al., 2011). At the level of body function, besides recording sEMG, the body kinematics should be recorded to record compensatory movement, body and cognitive fatigue, and implementation mode (Castellini et al., 2016). In the development stage of the model, the performance should be measured in the daily life of amputees before the trial stage or the system reaches its final stage based on the participation of the target population and the pilot test. The problem can be solved by using the simulation scale developed by experts. Amputees, medical staff, and researchers should be involved in evaluating the advantages and disadvantages of different pattern recognition systems and the impact of the system on different amputation levels.
5. Conclusions
This review paper briefly introduces the advances of DL-based sEMG pattern recognition techniques for the prosthetic hand in recent years. Through the literature survey of DL application in sEMG recognition, some of the core techniques are highlighted, some of the most common challenges to be solved are analyzed, and some of the most possible development prospects are discussed. It could be found that gesture recognition techniques based on DL has great potential in using sEMG signal to accurately interpret amputee's motion intention, which is of great significance to the development of intelligent prosthetic hand. However, their individual difference, real-time usability, and long-term stability are still being highly limited by many complex factors in these approaches. The high variability of sEMG, the lack of existing data, the limitation of hardware resources, and the lack of clinical evaluation conditions seriously affect the progress of pattern recognition techniques based on DL. In addition, the natural movements of the upper limbs are independent, continuous, and proportional activations of multiple DOFs, while the existing techniques can only use a limited number of patterns for discrete classification. These should be well-improved in the future real-time application of prosthetic hands.
Author Contributions
WL and PS wrote this paper. PS and HY suggested the methodology. PS supervised the entire project. All authors reviewed the manuscript, read and agreed to the published version of the manuscript.
Funding
This work was supported by a grant from the National Key Research and Development Program of China (2018YFB1307200).
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
Abbasi, B., Noohi, E., Parastegari, S., and Žefran, M. (2016). “Grasp taxonomy based on force distribution,” in 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN) (New York, NY), 1098–1103. doi: 10.1109/ROMAN.2016.7745245
Acar, G., Ozturk, O., Golparvar, A. J., Elboshra, T. A., Böhringer, K., and Yapici, M. K. (2019). Wearable and flexible textile electrodes for biopotential signal monitoring: a review. Electronics 8, 479–504. doi: 10.3390/electronics8050479
Ajiboye, A. B., and Weir, R. F. (2005). A heuristic fuzzy logic approach to EMG pattern recognition for multifunctional prosthesis control. IEEE Trans. Neural Syst. Rehabil. Eng. 13, 280–291. doi: 10.1109/TNSRE.2005.847357
Ameri, A., Akhaee, M. A., Scheme, E., and Englehart, K. (2018). Real-time, simultaneous myoelectric control using a convolutional neural network. PLoS ONE 13:e0203835. doi: 10.1371/journal.pone.0203835
Ameri, A., Akhaee, M. A., Scheme, E., and Englehart, K. (2019). Regression convolutional neural network for improved simultaneous EMG control. J. Neural Eng. 16:036015. doi: 10.1088/1741-2552/ab0e2e
Amma, C., Krings, T., Boer, J., and Schultz, T. (2015). “Advancing muscle-computer interfaces with high-density electromyography,” in Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems (Seoul: Association for Computing Machinery), 929–938. doi: 10.1145/2702123.2702501
Amsuess, S., Vujaklija, I., Goebel, P., Roche, A. D., Graimann, B., Aszmann, O. C., et al. (2016). Context-dependent upper limb prosthesis control for natural and robust use. IEEE Trans. Neural Syst. Rehabil. Eng. 24, 744–753. doi: 10.1109/TNSRE.2015.2454240
Amsüss, S., Paredes, L. P., Rudigkeit, N., Graimann, B., Herrmann, M. J., and Farina, D. (2013). “Long term stability of surface EMG pattern classification for prosthetic control,” in 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (Osaka), 3622–3625. doi: 10.1109/EMBC.2013.6610327
Asif, A. R., Waris, A., Gilani, S. O., Jamil, M., Ashraf, H., Shafique, M., et al. (2020). Performance evaluation of convolutional neural network for hand gesture recognition using EMG. Sensors 20:1642. doi: 10.3390/s20061642
Athavale, Y., and Krishnan, S. (2017). Biosignal monitoring using wearables: observations and opportunities. Biomed. Signal Process. Control 38, 22–33. doi: 10.1016/j.bspc.2017.03.011
Atzori, M., Cognolato, M., and Müller, H. (2016). Deep learning with convolutional neural networks applied to electromyography data: a resource for the classification of movements for prosthetic hands. Front. Neurorobot. 10:9. doi: 10.3389/fnbot.2016.00009
Atzori, M., Gijsberts, A., Castellini, C., Caputo, B., Hager, A.-G. M., Elsig, S., et al. (2014). Electromyography data for non-invasive naturally-controlled robotic hand prostheses. Sci. Data 1:140053. doi: 10.1038/sdata.2014.53
Averta, G., Della Santina, C., Valenza, G., Bicchi, A., and Bianchi, M. (2020). Exploiting upper-limb functional principal components for human-like motion generation of anthropomorphic robots. J. NeuroEng. Rehabil. 17, 1–15. doi: 10.1186/s12984-020-00680-8
Bahador, A., Yousefi, M., Marashi, M., and Bahador, O. (2020). High accurate lightweight deep learning method for gesture recognition based on surface electromyography. Comput. Methods Programs Biomed. 195:105643. doi: 10.1016/j.cmpb.2020.105643
Belter, J. T., Segil, J. L., Dollar, A. M., and Weir, R. F. (2013). Mechanical design and performance specifications of anthropomorphic prosthetic hands: a review. J. Rehabil. Res. Dev. 50, 599–617. doi: 10.1682/JRRD.2011.10.0188
Benalcázar, M. E., Anchundia, C. E., Zea, J. A., Zambrano, P., Jaramillo, A. G., and Segura, M. (2018). “Real-time hand gesture recognition based on artificial feed-forward neural networks and EMG,” in 2018 26th European Signal Processing Conference (EUSIPCO) (Rome), 1492–1496. doi: 10.23919/EUSIPCO.2018.8553126
Benalcázar, M. E., Motoche, C., Zea, J. A., Jaramillo, A. G., Anchundia, C. E., Zambrano, P., et al. (2017). “Real-time hand gesture recognition using the myo armband and muscle activity detection,” in 2017 IEEE Second Ecuador Technical Chapters Meeting (ETCM) (Salinas, CA), 1–6. doi: 10.1109/ETCM.2017.8247458
Bengoetxea, A., Leurs, F., Hoellinger, T., Cebolla, A. M., Dan, B., Cheron, G., et al. (2015). Physiological modules for generating discrete and rhythmic movements: component analysis of emg signals. Front. Comput. Neurosci. 8:169. doi: 10.3389/fncom.2014.00169
Bengoetxea, A., Leurs, F., Hoellinger, T., Cebolla, A. M., Dan, B., McIntyre, J., et al. (2014). Physiological modules for generating discrete and rhythmic movements: action identification by a dynamic recurrent neural network. Front. Comput. Neurosci. 8:100. doi: 10.3389/fncom.2014.00100
Beringer, III, C. R., Mansouri, M., Fisher, L. E., Collinger, J. L., Munin, M. C., Boninger, M. L., et al. (2020). The effect of wrist posture on extrinsic finger muscle activity during single joint movements. Sci. Rep. 10:8377. doi: 10.1038/s41598-020-65167-x
Betthauser, J. L., Krall, J. T., Bannowsky, S. G., Lévay, G., Kaliki, R. R., Fifer, M. S., et al. (2020). Stable responsive emg sequence prediction and adaptive reinforcement with temporal convolutional networks. IEEE Trans. Biomed. Eng. 67, 1707–1717. doi: 10.1109/TBME.2019.2943309
Betthauser, J. L., Krall, J. T., Kaliki, R. R., Fifer, M. S., and Thakor, N. V. (2019). “Stable electromyographic sequence prediction during movement transitions using temporal convolutional networks,” in Proceedings of International IEEE/EMBS Conference on Neural Engineering (San Francisco, CA), 1046–1049. doi: 10.1109/NER.2019.8717169
Bi, L., Feleke, A. G., and Guan, C. (2019). A review on emg-based motor intention prediction of continuous human upper limb motion for human-robot collaboration. Biomed. Signal Process. Control 51, 113–127. doi: 10.1016/j.bspc.2019.02.011
Biddiss, E., and Chau, T. (2007). Upper-limb prosthetics–critical factors in device abandonment. Am. J. Phys. Med. Rehabil. 86, 977–987. doi: 10.1097/PHM.0b013e3181587f6c
Bizzi, E., and Cheung, V. C. K. (2013). The neural origin of muscle synergies. Front. Comput. Neurosci. 7:51. doi: 10.3389/fncom.2013.00051
Blana, D., Kyriacou, T., Lambrecht, J. M., and Chadwick, E. K. (2016). Feasibility of using combined emg and kinematic signals for prosthesis control: a simulation study using a virtual reality environment. J. Electromyogr. Kinesiol. 29, 21–27. doi: 10.1016/j.jelekin.2015.06.010
Boschmann, A., and Platzner, M. (2012). “Reducing classification accuracy degradation of pattern recognition based myoelectric control caused by electrode shift using a high density electrode array,” in 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society (San Diego, CA), 4324–4327. doi: 10.1109/EMBC.2012.6346923
Bullock, I. M., Zheng, J. Z., De La Rosa, S., Guertler, C., and Dollar, A. M. (2013). Grasp frequency and usage in daily household and machine shop tasks. IEEE Trans. Hapt. 6, 296–308. doi: 10.1109/TOH.2013.6
Butterfass, J., Grebenstein, M., Liu, H., and Hirzinger, G. (2001). “DLR-Hand II: next generation of a dextrous robot hand,” in 2001 ICEA. IEEE International Conference on Robotics and Automation (Seoul: IEEE), 109–114.
Castellini, C., Bongers, R. M., Nowak, M., and van der Sluis, C. K. (2016). Upper-limb prosthetic myocontrol: two recommendations. Front. Neurosci. 9:496. doi: 10.3389/fnins.2015.00496
Castellini, C., Fiorilla, A., and Sandini, G. (2009). Multi-subject/daily-life activity emg-based control of mechanical hands. J. Neuroeng. Rehabil. 6:41. doi: 10.1186/1743-0003-6-41
Chadwell, A., Kenney, L., Thies, S., Galpin, A., and Head, J. (2016). The reality of myoelectric prostheses: understanding what makes these devices difficult for some users to control. Front. Neurorobot. 10:7. doi: 10.3389/fnbot.2016.00007
Chen, J., Bi, S., Zhang, G., and Cao, G. (2020). High-density surface EMG-based gesture recognition using a 3D convolutional neural network. Sensors 20:1201. doi: 10.3390/s20041201
Chen, L., Fu, J., Wu, Y., Li, H., and Zheng, B. (2020). Hand gesture recognition using compact CNN via surface electromyography signals. Sensors 20:672. doi: 10.3390/s20030672
Chu, J., Moon, I., and Mun, M. (2006). A real-time emg pattern recognition system based on linear-nonlinear feature projection for a multifunction myoelectric hand. IEEE Trans. Biomed. Eng. 53, 2232–2239. doi: 10.1109/TBME.2006.883695
Chung, E. A., and Benalcázar, M. E. (2019). “Real-time hand gesture recognition model using deep learning techniques and EMG signals,” in 2019 27th European Signal Processing Conference (EUSIPCO) (A Coruna), 1–5. doi: 10.23919/EUSIPCO.2019.8903136
Cipriani, C., Controzzi, M., and Carrozza, M. C. (2011a). The smarthand transradial prosthesis. J. Neuroeng. Rehabil. 8:29. doi: 10.1186/1743-0003-8-29
Cipriani, C., Sassu, R., Controzzi, M., and Carrozza, M. C. (2011b). “Influence of the weight actions of the hand prosthesis on the performance of pattern recognition based myoelectric control: preliminary study,” in 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society (Boston, MA), 1620–1623. doi: 10.1109/IEMBS.2011.6090468
Clancy, E., Morin, E., and Merletti, R. (2002). Sampling, noise-reduction and amplitude estimation issues in surface electromyography. J. Electromyogr. Kinesiol. 12, 1–16. doi: 10.1016/S1050-6411(01)00033-5
Clingman, R., and Pidcoe, P. (2014). A novel myoelectric training device for upper limb prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 22, 879–885. doi: 10.1109/TNSRE.2014.2315046
Costanza, E., Inverso, S. A., Allen, R., and Maes, P. (2007). “Intimate interfaces in action: assessing the usability and subtlety of EMG-based motionless gestures,” in Proceedings of ACM SIGCHI Conference on Human Factors in Computing Systems (New York, NY: Association for Computing Machinery), 819–828. doi: 10.1145/1240624.1240747
Côté Allard, U., Nougarou, F., Fall, C. L., Giguère, P., Gosselin, C., Laviolette, F., et al. (2016). “A convolutional neural network for robotic arm guidance using sEMG based frequency-features,” in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Daejeon), 2464–2470. doi: 10.1109/IROS.2016.7759384
Côté-Allard, U., Campbell, E., Phinyomark, A., Laviolette, F., Gosselin, B., and Scheme, E. (2020). Interpreting deep learning features for myoelectric control: a comparison with handcrafted features. Front. Bioeng. Biotechnol. 8:158. doi: 10.3389/fbioe.2020.00158
Côté-Allard, U., Fall, C. L., Drouin, A., Campeau-Lecours, A., Gosselin, C., Glette, K., et al. (2019). Deep learning for electromyographic hand gesture signal classification using transfer learning. IEEE Trans. Neural Syst. Rehabil. Eng. 27, 760–771. doi: 10.1109/TNSRE.2019.2896269
Côté-Allard, U., Gagnon-Turcotte, G., Phinyomark, A., Glette, K., Scheme, E. J., Laviolette, F., et al. (2020). Unsupervised domain adversarial self-calibration for electromyography-based gesture recognition. IEEE Access 8, 177941–177955. doi: 10.1109/ACCESS.2020.3027497
Day, C. R., Chadwick, E. K., and Blana, D. (2020). “A comparative evaluation of time-delay, deep learning and echo state neural networks when used as simulated transhumeral prosthesis controllers,” in 2020 International Joint Conference on Neural Networks (IJCNN), 1–7. doi: 10.1109/IJCNN48605.2020.9206772
de Vet, H., Terwee, C., Mokkink, L., and Knol, D. (2011). Measurement in Medicine–A Practical Guide. New York, NY: Cambridge University Press.
Donovan, I. M., Okada, K., and Zhang, X. (2018). “Adjacent features for high-density EMG pattern recognition,” in 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (Honolulu, HI), 5978–5981. doi: 10.1109/EMBC.2018.8513534
Du, Y., Jin, W., Wei, W., Hu, Y., and Geng, W. (2017). Surface EMG-based inter-session gesture recognition enhanced by deep domain adaptation. Sensors 17:458. doi: 10.3390/s17030458
Englehart, K., Hudgin, B., and Parker, P. A. (2001). A wavelet-based continuous classification scheme for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 48, 302–311. doi: 10.1109/10.914793
Englehart, K., and Hudgins, B. (2003). A robust, real-time control scheme for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 50, 848–854. doi: 10.1109/TBME.2003.813539
Fang, C., He, B., Wang, Y., Cao, J., and Gao, S. (2020). EMG-centered multisensory based technologies for pattern recognition in rehabilitation: state of the art and challenges. Biosensors 10:85. doi: 10.3390/bios10080085
Fang, Y., Hettiarachchi, N., Zhou, D., and Liu, H. (2015). Multi-modal sensing techniques for interfacing hand prostheses: a review. IEEE Sens. J. 15, 6065–6076. doi: 10.1109/JSEN.2015.2450211
Farina, D., and Aszmann, O. (2014). Bionic limbs: clinical reality and academic promises. Sci. Transl. Med. 6:257ps212. doi: 10.1126/scitranslmed.3010453
Farina, D., Castronovo, A. M., Vujaklija, I., Sturma, A., Salminger, S., Hofer, C., et al. (2017). Common synaptic input to motor neurons and neural drive to targeted reinnervated muscles. J. Neurosci. 37, 11285–11292. doi: 10.1523/JNEUROSCI.1179-17.2017
Farina, D., Holobar, A., Merletti, R., and Enoka, R. M. (2010). Decoding the neural drive to muscles from the surface electromyogram. Clin. Neurophysiol. 121, 1616–1623. doi: 10.1016/j.clinph.2009.10.040
Farina, D., Jiang, N., Rehbaum, H., Holobar, A., Graimann, B., Dietl, H., et al. (2014a). The extraction of neural information from the surface EMG for the control of upper-limb prostheses: emerging avenues and challenges. IEEE Trans. Neural Syst. Rehabil. Eng. 22, 797–809. doi: 10.1109/TNSRE.2014.2305111
Farina, D., Merletti, R., and Enoka, R. (2004). The extraction of neural strategies from the surface EMG. J. Appl. Physiol. 96, 1486–1495. doi: 10.1152/japplphysiol.01070.2003
Farina, D., Merletti, R., and Enoka, R. M. (2014b). The extraction of neural strategies from the surface EMG: an update. J. Appl. Physiol. 117, 1215–1230. doi: 10.1152/japplphysiol.00162.2014
Feix, T., Pawlik, R., Schmiedmayer, H. B., Romero, J., and Kragic, D. (2009). “A comprehensive grasp taxonomy,” in Robotics, Science and Systems Conference: Workshop on Understanding the Human Hand for Advancing Robotic Manipulation (Seattle, WA), 2–3.
Feix, T., Romero, J., Schmiedmayer, H., Dollar, A. M., and Kragic, D. (2016). The grasp taxonomy of human grasp types. IEEE Trans. Hum. Mach. Syst. 46, 66–77. doi: 10.1109/THMS.2015.2470657
Fitts, P. M. (1954). The information capacity of the human motor system in controlling the amplitude of movement. J. Exp. Psychol. 47, 381–391. doi: 10.1037/h0055392
Fougner, A., Scheme, E., Chan, A. D. C., Englehart, K., and Stavdahl, Ø. (2011). Resolving the limb position effect in myoelectric pattern recognition. IEEE Trans. Neural Syst. Rehabil. Eng. 19, 644–651. doi: 10.1109/TNSRE.2011.2163529
Fougner, A., Stavdahl, Ø., Kyberd, P. J., Losier, Y. G., and Parker, P. A. (2012). Control of upper limb prostheses: terminology and proportional myoelectric control—a review. IEEE Trans. Neural Syst. Rehabil. Eng. 20, 663–677. doi: 10.1109/TNSRE.2012.2196711
Fu, Y., Zhao, J., Dong, Y., and Wang, X. (2020). Dry electrodes for human bioelectrical signal monitoring. Sensors 20:3651. doi: 10.3390/s20133651
Fukuda, O., Tsuji, T., Kaneko, M., and Otsuka, A. (2003). A human-assisting manipulator teleoperated by emg signals and arm motions. IEEE Trans. Robot. Automat. 19, 210–222. doi: 10.1109/TRA.2003.808873
Geng, W., Du, Y., Jin, W., Wei, W., Hu, Y., and Li, J. (2016). Gesture recognition by instantaneous surface EMG images. Sci. Rep. 6:36571. doi: 10.1038/srep36571
Geng, Y., Zhou, P., and Li, G. (2012). Toward attenuating the impact of arm positions on electromyography pattern-recognition based motion classification in transradial amputees. J. Neuroeng. Rehabil. 9:74. doi: 10.1186/1743-0003-9-74
Gigli, A., Gijsberts, A., and Castellini, C. (2020). The merits of dynamic data acquisition for realistic myocontrol. Front. Bioeng. Biotechnol. 8:361. doi: 10.3389/fbioe.2020.00361
Glaser, V., Holobar, A., and Zazula, D. (2007). “An approach to the real-time surface electromyogram decomposition,” in 11th Mediterranean Conference on Medical and Biomedical Engineering and Computing 2007, eds T. Jarm, P. Kramar, and A. Zupanic (Berlin; Heidelberg: Springer Berlin Heidelberg), 105–108. doi: 10.1007/978-3-540-73044-6_27
Glaser, V., Holobar, A., and Zazula, D. (2013). Real-time motor unit identification from high-density surface EMG. IEEE Trans. Neural Syst. Rehabil. Eng. 21, 949–958. doi: 10.1109/TNSRE.2013.2247631
Gregori, V., Cognolato, M., Saetta, G., Atzori, M., and The MeganePro Consortium Gijsberts, A. (2019). On the visuomotor behavior of amputees and able-bodied people during grasping. Front. Bioeng. Biotechnol. 7:316. doi: 10.3389/fbioe.2019.00316
Gusman, J., Mastinu, E., and Ortiz-Catalán, M. (2017). Evaluation of computer-based target achievement tests for myoelectric control. IEEE J. Transl. Eng. Health Med. 5, 1–10. doi: 10.1109/JTEHM.2017.2776925
Hahne, J. M., Bießmann, F., Jiang, N., Rehbaum, H., Farina, D., Meinecke, F. C., et al. (2014). Linear and nonlinear regression techniques for simultaneous and proportional myoelectric control. IEEE Trans. Neural Syst. Rehabil. Eng. 22, 269–279. doi: 10.1109/TNSRE.2014.2305520
Hargrove, L. J., Miller, L. A., Turner, K., and Kuiken, T. A. (2017). Myoelectric pattern recognition outperforms direct control for transhumeral amputees with targeted muscle reinnervation: a randomized clinical trial. Sci. Rep. 7:13840. doi: 10.1038/s41598-017-14386-w
He, J., Zhang, D., Jiang, N., Sheng, X., Farina, D., and Zhu, X. (2015). User adaptation in long-term, open-loop myoelectric training: implications for EMG pattern recognition in prosthesis control. J. Neural Eng. 12:046005. doi: 10.1088/1741-2560/12/4/046005
He, Y., Fukuda, O., Bu, N., Okumura, H., and Yamaguchi, N. (2018). “Surface EMG pattern recognition using long short-term memory combined with multilayer perceptron,” in 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (Honolulu, HI), 5636–5639. doi: 10.1109/EMBC.2018.8513595
Holobar, A., and Zazula, D. (2007). Multichannel blind source separation using convolution kernel compensation. IEEE Trans. Signal Process. 55, 4487–4496. doi: 10.1109/TSP.2007.896108
Hu, Y., Wong, Y., Wei, W., Du, Y., Kankanhalli, M., and Geng, W. (2018). A novel attention-based hybrid CNN-RNN architecture for sEMG-based gesture recognition. PLoS ONE 13:e0206049. doi: 10.1371/journal.pone.0206049
Huang, H., Kuiken, T. A., and Lipschutz, R. D. (2009). A strategy for identifying locomotion modes using surface electromyography. IEEE Trans. Biomed. Eng. 56, 65–73. doi: 10.1109/TBME.2008.2003293
Huang, Q., Yang, D., Jiang, L., Zhang, H., Liu, H., and Kotani, K. (2017). A novel unsupervised adaptive learning method for long-term electromyography (EMG) pattern recognition. Sensors 17:1370. doi: 10.3390/s17061370
Hudgins, B., Parker, P., and Scott, R. N. (1993). A new strategy for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 40, 82–94. doi: 10.1109/10.204774
Hussaini, A., Zinck, A., and Kyberd, P. (2017). Categorization of compensatory motions in transradial myoelectric prosthesis users. Prosthet. Orthot. Int. 41, 286–293. doi: 10.1177/0309364616660248
Jali, M. H., Ibrahim, I. M., Sulaima, M. F., Bukhari, W. M., Izzuddin, T. A., and Nasir, M. N. (2015). “Features extraction of EMG signal using time domain analysis for arm rehabilitation device,” in International Conference on Mathematics, Engineering and Industrial Applications 2014 (ICoMEIA 2014) (Penang), 070041. doi: 10.1063/1.4915759
Jarrassé, N., Nicol, C., Touillet, A., Richer, F., Martinet, N., Paysant, J., et al. (2017). Classification of phantom finger, hand, wrist, and elbow voluntary gestures in transhumeral amputees with sEMG. IEEE Trans. Neural Syst. Rehabil. Eng. 25, 71–80. doi: 10.1109/TNSRE.2016.2563222
Jiang, N., Dosen, S., Muller, K., and Farina, D. (2012). Myoelectric control of artificial limbs—is there a need to change focus? IEEE Signal Process. Mag. 29, 152–150. doi: 10.1109/MSP.2012.2203480
Jiang, N., Englehart, K. B., and Parker, P. A. (2009). Extracting simultaneous and proportional neural control information for multiple-DOF prostheses from the surface electromyographic signal. IEEE Trans. Biomed. Eng. 56, 1070–1080. doi: 10.1109/TBME.2008.2007967
Jiang, N., Rehbaum, H., Vujaklija, I., Graimann, B., and Farina, D. (2014a). Intuitive, online, simultaneous, and proportional myoelectric control over two degrees-of-freedom in upper limb amputees. IEEE Trans. Neural Syst. Rehabil. Eng. 22, 501–510. doi: 10.1109/TNSRE.2013.2278411
Jiang, N., Vujaklija, I., Rehbaum, H., Graimann, B., and Farina, D. (2014b). Is accurate mapping of emg signals on kinematics needed for precise online myoelectric control? IEEE Trans. Neural Syst. Rehabil. Eng. 22, 549–558. doi: 10.1109/TNSRE.2013.2287383
Jiang, S., Lv, B., Guo, W., Zhang, C., Wang, H., Sheng, X., et al. (2018). Feasibility of wrist-worn, real-time hand, and surface gesture recognition via sEMG and IMU sensing. IEEE Trans. Ind. Inform. 14, 3376–3385. doi: 10.1109/TII.2017.2779814
Joshi, D., Nakamura, B. H., and Hahn, M. E. (2015). High energy spectrogram with integrated prior knowledge for EMG-based locomotion classification. Med. Eng. Phys. 37, 518–524. doi: 10.1016/j.medengphy.2015.03.001
Kamavuako, E. N., Scheme, E. J., and Englehart, K. B. (2014). On the usability of intramuscular EMG for prosthetic control: a Fitts' law approach. J. Electromyogr. Kinesiol. 24, 770–777. doi: 10.1016/j.jelekin.2014.06.009
Kapelner, T., Negro, F., Aszmann, O. C., and Farina, D. (2018). Decoding motor unit activity from forearm muscles: perspectives for myoelectric control. IEEE Trans. Neural Syst. Rehabil. Eng. 26, 244–251. doi: 10.1109/TNSRE.2017.2766360
Ketyko, I., Kovacs, F., and Varga, K. (2019). “Domain adaptation for sEMG-based gesture recognition with recurrent neural networks,” in 2019 International Joint Conference on Neural Networks (IJCNN). Proceedings (Piscataway, NJ: IEEE), 7. doi: 10.1109/IJCNN.2019.8852018
Khushaba, R. N., Al-Timemy, A. H., Al-Ani, A., and Al-Jumaily, A. (2017). A framework of temporal-spatial descriptors-based feature extraction for improved myoelectric pattern recognition. IEEE Trans. Neural Syst. Rehabil. Eng. 25, 1821–1831. doi: 10.1109/TNSRE.2017.2687520
Khushaba, R. N., Kodagoda, S., Takruri, M., and Dissanayake, G. (2012). Toward improved control of prosthetic fingers using surface electromyogram (EMG) signals. Expert Syst. Appl. 39, 10731–10738. doi: 10.1016/j.eswa.2012.02.192
Kwon, S., and Kim, J. (2011). Real-time upper limb motion estimation from surface electromyography and joint angular velocities using an artificial neural network for human–machine cooperation. IEEE Trans. Inf. Technol. Biomed. 15, 522–530. doi: 10.1109/TITB.2011.2151869
Kyranou, I., Vijayakumar, S., and Erden, M. S. (2018). Causes of performance degradation in non-invasive electromyographic pattern recognition in upper limb prostheses. Front. Neurorobot. 12:58. doi: 10.3389/fnbot.2018.00058
Le, Q. V. (2015). “A tutorial on deep learning part 2: autoencoders, convolutional neural networks and recurrent neural networks,” in Google Brain (Mountain View, CA), 1–20.
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep learning. Nature 521, 436–444. doi: 10.1038/nature14539
Lee, S., Sung, M., and Choi, Y. (2020). Wearable fabric sensor for controlling myoelectric hand prosthesis via classification of foot postures. Smart Mater. Struct. 29:035004. doi: 10.1088/1361-665X/ab6690
Levi, T., Bonifazi, P., Massobrio, P., and Chiappalone, M. (2018). Editorial: closed-loop systems for next-generation neuroprostheses. Front. Neurosci. 12:26. doi: 10.3389/fnins.2018.00026
Li, G., Li, Y., Zhang, Z., Geng, Y., and Zhou, R. (2010a). “Selection of sampling rate for EMG pattern recognition based prosthesis control,” in 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology (Buenos Aires: IEEE), 5058–5061.
Li, G., Schultz, A. E., and Kuiken, T. A. (2010b). Quantifying pattern recognition-based myoelectric control of multifunctional transradial prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 18, 185–192. doi: 10.1109/TNSRE.2009.2039619
Li, X., Samuel, O. W., Zhang, X., Wang, H., Fang, P., and Li, G. (2017). A motion-classification strategy based on sEMG-EEG signal combination for upper-limb amputees. J. Neuroeng. Rehabil. 14:2. doi: 10.1186/s12984-016-0212-z
Liang, S., Wu, Y., Chen, J., Zhang, L., Chen, P., Chai, Z., et al. (2019). Identification of gesture based on combination of raw sEMG and sEMG envelope using supervised learning and univariate feature selection. J. Bionic Eng. 16, 647–662. doi: 10.1007/s42235-019-0052-1
Liu, H., Yang, D., Fan, S., and Cai, H. (2016). On the development of intrinsically-actuated, multisensory dexterous robotic hands. Robomech J. 3:4. doi: 10.1186/s40648-016-0043-5
Liu, X., Sacks, J., Zhang, M., Richardson, A. G., Lucas, T. H., and Van der Spiegel, J. (2017). The virtual trackpad: an electromyography-based, wireless, real-time, low-power, embedded hand-gesture-recognition system using an event-driven artificial neural network. IEEE Trans. Circuits Syst. II Exp. Briefs 64, 1257–1261. doi: 10.1109/TCSII.2016.2635674
Llop-Harillo, I., Pérez-González, A., Starke, J., and Asfour, T. (2019). The anthropomorphic hand assessment protocol (AHAP). Robot. Auton. Syst. 121:103259. doi: 10.1016/j.robot.2019.103259
Luchetti, M., Cutti, A. G., Verni, G., Sacchetti, R., and Rossi, N. (2015). Impact of Michelangelo prosthetic hand: findings from a crossover longitudinal study. J. Rehabil. Res. Dev. 52, 605–618. doi: 10.1682/JRRD.2014.11.0283
Ma, Y., Chen, B., Ren, P., Zheng, N., Indiveri, G., and Donati, E. (2020). EMG-based gestures classification using a mixed-signal neuromorphic processing system. IEEE J. Emerg. Top. Circuits Syst. 10, 578–587. doi: 10.1109/JETCAS.2020.3037951
Mane, S., Kambli, R., Kazi, F., and Singh, N. (2015). Hand motion recognition from single channel surface EMG using wavelet & artificial neural network. Proc. Comput. Sci. 49, 58–65. doi: 10.1016/j.procs.2015.04.227
McGill, K. (2004). Surface electromyogram signal modelling. Med. Biol. Eng. Comput. 42, 446–454. doi: 10.1007/BF02350985
Merad, M., de Montalivet, E., Touillet, A., Martinet, N., Roby-Brami, A., and Jarrasse, N. (2018). Can we achieve intuitive prosthetic elbow control based on healthy upper limb motor strategies? Front. Neurorobot. 12:1. doi: 10.3389/fnbot.2018.00001
Merritt, C. R., Troy Nagle, H., and Grant, E. (2009). Fabric-based active electrode design and fabrication for health monitoring clothing. IEEE Trans. Inf. Technol. Biomed. 13, 274–280. doi: 10.1109/TITB.2009.2012408
Muceli, S., and Farina, D. (2012). Simultaneous and proportional estimation of hand kinematics from EMG during mirrored movements at multiple degrees-of-freedom. IEEE Trans. Neural Syst. Rehabil. Eng. 20, 371–378. doi: 10.1109/TNSRE.2011.2178039
Muceli, S., Jiang, N., and Farina, D. (2014). Extracting signals robust to electrode number and shift for online simultaneous and proportional myoelectric control by factorization algorithms. IEEE Trans. Neural Syst. Rehabil. Eng. 22, 623–633. doi: 10.1109/TNSRE.2013.2282898
Naik, G. R., Selvan, S. E., Gobbo, M., Acharyya, A., and Nguyen, H. T. (2016). Principal component analysis applied to surface electromyography: a comprehensive review. IEEE ACCESS 4, 4025–4037. doi: 10.1109/ACCESS.2016.2593013
Nasri, N., Orts-Escolano, S., Gomez-Donoso, F., and Cazorla, M. (2019). Inferring static hand poses from a low-cost non-intrusive semg sensor. Sensors 19:371. doi: 10.3390/s19020371
Nazmi, N., Abdul Rahman, M. A., Yamamoto, S. I., Ahmad, S. A., Zamzuri, H., and Mazlan, S. A. (2016). A review of classification techniques of emg signals during isotonic and isometric contractions. Sensors 16:1304. doi: 10.3390/s16081304
Neacsu, A. A., Cioroiu, G., Radoi, A., and Burileanu, C. (2019). “Automatic EMG-based hand gesture recognition system using time-domain descriptors and fully-connected neural networks,” in 42nd International Conference on Telecommunications and Signal Processing (TSP) (Budapest: IEEE), 232–235. doi: 10.1109/TSP.2019.8768831
Nef, T., and Riener, R. (2005). “Armin–design of a novel arm rehabilitation robot,” in 9th International Conference on Rehabilitation Robotics 2005. ICORR 2005 (Chicago, IL), 57–60. doi: 10.1109/ICORR.2005.1501051
Negro, F., Muceli, S., Castronovo, A. M., Holobar, A., and Farina, D. (2016). Multi-channel intramuscular and surface EMG decomposition by convolutive blind source separation. J. Neural Eng. 13:026027. doi: 10.1088/1741-2560/13/2/026027
Nielsen, J. L. G., Holmgaard, S., Jiang, N., Englehart, K. B., Farina, D., and Parker, P. A. (2011). Simultaneous and proportional force estimation for multifunction myoelectric prostheses using mirrored bilateral training. IEEE Trans. Biomed. Eng. 58, 681–688. doi: 10.1109/TBME.2010.2068298
Nissler, C., Mouriki, N., and Castellini, C. (2016). Optical myography: detecting finger movements by looking at the forearm. Front. Neurorobot. 10:3. doi: 10.3389/fnbot.2016.00003
Nougarou, F., Campeau-Lecours, A., Islam, R., Massicotte, D., and Gosselin, B. (2018). “Muscle activity distribution features extracted from HD sEMG to perform forearm pattern recognition,” in 2018 IEEE Life Sciences Conference (LSC) (Montreal, QC), 275–278. doi: 10.1109/LSC.2018.8572204
Ortiz-Catalan, M., Rouhani, F., Branemark, R., and Håkansson, B. (2015). “Offline accuracy: a potentially misleading metric in myoelectric pattern recognition for prosthetic control,” in 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (Milan), 1140–1143. doi: 10.1109/EMBC.2015.7318567
Oskoei, M. A., and Hu, H. (2007). Myoelectric control systems–a survey. Biomed. Signal Process. Control 2, 275–294. doi: 10.1016/j.bspc.2007.07.009
Oskoei, M. A., and Hu, H. (2008). Support vector machine-based classification scheme for myoelectric control applied to upper limb. IEEE Trans. Biomed. Eng. 55, 1956–1965. doi: 10.1109/TBME.2008.919734
Palermo, F., Cognolato, M., Gijsberts, A., Müller, H., Caputo, B., and Atzori, M. (2017). “Repeatability of grasp recognition for robotic hand prosthesis control based on sEMG data,” in 2017 International Conference on Rehabilitation Robotics (ICORR) (London), 1154–1159. doi: 10.1109/ICORR.2017.8009405
Pani, D., Meloni, P., Tuveri, G., Palumbo, F., Massobrio, P., and Raffo, L. (2017). An FPGA platform for real-time simulation of spiking neuronal networks. Front. Neurosci. 11:90. doi: 10.3389/fnins.2017.00090
Parajuli, N., Sreenivasan, N., Bifulco, P., Cesarelli, M., Savino, S., Niola, V., et al. (2019). Real-time EMG based pattern recognition control for hand prostheses: a review on existing methods, challenges and future implementation. Sensors 19:4596. doi: 10.3390/s19204596
Park, K., and Lee, S. (2016). “Movement intention decoding based on deep learning for multiuser myoelectric interfaces,” in 2016 4th International Winter Conference on Brain-Computer Interface (BCI) (Gangwon), 1–2. doi: 10.1109/IWW-BCI.2016.7457459
Park, K., Suk, H., and Lee, S. (2016). Position-independent decoding of movement intention for proportional myoelectric interfaces. IEEE Trans. Neural Syst. Rehabil. Eng. 24, 928–939. doi: 10.1109/TNSRE.2015.2481461
Patricia, N., Tommasit, T., and Caputo, B. (2014). “Multi-source adaptive learning for fast control of prosthetics hand,” in 2014 22nd International Conference on Pattern Recognition, 2769–2774. doi: 10.1109/ICPR.2014.477
Phinyomark, A., Limsakul, C., and Phukpattaranont, P. (2009). A novel feature extraction for robust EMG pattern recognition. arXiv[Preprint].arXiv:0912.3973.
Phinyomark, A., Phukpattaranont, P., and Limsakul, C. (2012a). Feature reduction and selection for EMG signal classification. Expert Syst. Appl. 39, 7420–7431. doi: 10.1016/j.eswa.2012.01.102
Phinyomark, A., Phukpattaranont, P., and Limsakul, C. (2012b). Fractal analysis features for weak and single-channel upper-limb EMG signals. Expert Syst. Appl. 39, 11156–11163. doi: 10.1016/j.eswa.2012.03.039
Phinyomark, A., Quaine, F., Charbonnier, S., Serviere, C., Tarpin-Bernard, F., and Laurillau, Y. (2013). EMG feature evaluation for improving myoelectric pattern recognition robustness. Expert Syst. Appl. 40, 4832–4840. doi: 10.1016/j.eswa.2013.02.023
Powell, M., and Thakor, N. (2013). A training strategy for learning pattern recognition control for myoelectric prostheses. J. Prosthet. Orthot. 25, 30–41. doi: 10.1097/JPO.0b013e31827af7c1
Pylatiuk, C., Muller-Riederer, M., Kargov, A., Schulz, S., Schill, O., Reischl, M., et al. (2009). “Comparison of surface EMG monitoring electrodes for long-term use in rehabilitation device control,” in 2009 IEEE International Conference on Rehabilitation Robotics (Kyoto), 300–304. doi: 10.1109/ICORR.2009.5209576
Qi, S., Wu, X., Chen, W. H., Liu, J., Zhang, J., and Wang, J. (2020). semg-based recognition of composite motion with convolutional neural network. Sens. Actuators A 311:112046. doi: 10.1016/j.sna.2020.112046
Rizzoglio, F., Pierella, C., Santis, D. D., Mussa-Ivaldi, F., and Casadio, M. (2020). A hybrid body-machine interface integrating signals from muscles and motions. J. Neural Eng. 17:046004. doi: 10.1088/1741-2552/ab9b6c
Rodríguez-Tapia, B., Soto, I., Martínez, D. M., and Arballo, N. C. (2020). Myoelectric interfaces and related applications: current state of EMG signal processing–a systematic review. IEEE Access 8, 7792–7805. doi: 10.1109/ACCESS.2019.2963881
Samuel, O. W., Asogbon, M. G., Geng, Y., Al-Timemy, A. H., Pirbhulal, S., Ji, N., et al. (2019). Intelligent EMG pattern recognition control method for upper-limb multifunctional prostheses: advances, current challenges, and future prospects. IEEE Access 7, 10150–10165. doi: 10.1109/ACCESS.2019.2891350
Saponas, T. S., Tan, D. S., Morris, D., and Balakrishnan, R. (2008). “Demonstrating the feasibility of using forearm electromyography for muscle-computer interfaces,” in Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, CHI '08 (New York, NY: Association for Computing Machinery), 515–524. doi: 10.1145/1357054.1357138
Saponas, T. S., Tan, D. S., Morris, D., Turner, J., and Landay, J. A. (2010). “Making muscle-computer interfaces more practical,” in Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, CHI '10 (New York, NY: Association for Computing Machinery), 851–854. doi: 10.1145/1753326.1753451
Sartori, M., Llyod, D. G., and Farina, D. (2016). Neural data-driven musculoskeletal modeling for personalized neurorehabilitation technologies. IEEE Trans. Biomed. Eng. 63, 879–893. doi: 10.1109/TBME.2016.2538296
Sawant, A. G., Nitnaware, V. N., and Deshpande, A. A. (2020). “Spartan-6 FPGA implementation of AES algorithm,” in ICCCE 2019, eds A. Kumar and S. Mozar (Singapore: Springer Singapore), 205–211. doi: 10.1007/978-981-13-8715-9_26
Scano, A., Zanoletti, M., Pirovano, I., Spinelli, L., Contini, D., Torricelli, A., et al. (2019). NIRS-EMG for clinical applications: a systematic review. Appl. Sci. 9:2952. doi: 10.3390/app9152952
Scheme, E. J., Englehart, K. B., and Hudgins, B. S. (2011). Selective classification for improved robustness of myoelectric control under nonideal conditions. IEEE Trans. Biomed. Eng. 58, 1698–1705. doi: 10.1109/TBME.2011.2113182
Scheme, E. J., Hudgins, B. S., and Englehart, K. B. (2013). Confidence-based rejection for improved pattern recognition myoelectric control. IEEE Trans. Biomed. Eng. 60, 1563–1570. doi: 10.1109/TBME.2013.2238939
Schmitz, A., Pattacini, U., Nori, F., Natale, L., Metta, G., and Sandini, G. (2010). “Design, realization and sensorization of the dexterous iCub hand,” in 2010 10th IEEE-RAS International Conference on Humanoid Robots (Nashville, TN), 186–191. doi: 10.1109/ICHR.2010.5686825
Shim, H., and Lee, S. (2015). Multi-channel electromyography pattern classification using deep belief networks for enhanced user experience. J. Central South Univ. 22, 1801–1808. doi: 10.1007/s11771-015-2698-0
Simao, M., Neto, P., and Gibaru, O. (2019). EMG-based online classification of gestures with recurrent neural networks. Pattern Recognit. Lett. 128, 45–51. doi: 10.1016/j.patrec.2019.07.021
Simon, A. M., Hargrove, L. J., Lock, B. A., and Kuiken, T. A. (2011). A decision-based velocity ramp for minimizing the effect of misclassifications during real-time pattern recognition control. IEEE Trans. Biomed. Eng. 58, 2360–2368. doi: 10.1109/TBME.2011.2155063
Smith, A., Nanda, P., and Brown, E. E. (2009). “Development of a myoelectric control scheme based on a time delayed neural network,” in 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society (Minneapolis, MN), 3004–3007. doi: 10.1109/IEMBS.2009.5332846
Sun, Y., and Yu, X. B. (2016). Capacitive biopotential measurement for electrophysiological signal acquisition: a review. IEEE Sens. J. 16, 2832–2853. doi: 10.1109/JSEN.2016.2519392
Tam, S., Boukadoum, M., Campeau-Lecours, A., and Gosselin, B. (2020). A fully embedded adaptive real-time hand gesture classifier leveraging HD-semg and deep learning. IEEE Trans. Biomed. Circuits Syst. 14, 232–243. doi: 10.1109/TBCAS.2019.2955641
Tenore, F. V. G., Ramos, A., Fahmy, A., Acharya, S., Etienne-Cummings, R., and Thakor, N. V. (2009). Decoding of individuated finger movements using surface electromyography. IEEE Trans. Biomed. Eng. 56, 1427–1434. doi: 10.1109/TBME.2008.2005485
Tong, R., Zhang, Y., Chen, H., and Liu, H. (2019). Learn the temporal-spatial feature of sEMG via dual-flow network. Int. J. Humanoid Robot. 16:1941004. doi: 10.1142/S0219843619410044
Triwiyanto, T., Pawana, I. P. A., and Purnomo, M. H. (2020). An improved performance of deep learning based on convolution neural network to classify the hand motion by evaluating hyper parameter. IEEE Trans. Neural Syst. Rehabil. Eng. 28, 1678–1688. doi: 10.1109/TNSRE.2020.2999505
Tsinganos, P., Cornelis, B., Cornelis, J., Jansen, B., and Skodras, A. (2018). “Deep learning in EMG-based gesture recognition,” in Proceedings of the 5h International Conference on Physiological Computing Systems (Seville, SP: SciTePress), 107–114. doi: 10.5220/0006960201070114
Tsinganos, P., Cornelis, B., Cornelis, J., Jansen, B., and Skodras, A. (2019). “Improved gesture recognition based on sEMG signals and TCN,” in ICASSP 2019–2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP) (Brighton), 1169–1173. doi: 10.1109/ICASSP.2019.8683239
van der Niet, O., Bongers, R. M., and van der Sluis, C. K. (2013). Functionality of i-LIMB and i-LIMB pulse hands: case report. J. Rehabil. Res. Dev. 50, 1123–1128. doi: 10.1682/JRRD.2012.08.0140
Vasluian, E., de Jong, I. G. M., Janssen, W. G. M., Poelma, M. J., van Wijk, I., Reinders-Messelink, H. A., et al. (2013). Opinions of youngsters with congenital below-elbow deficiency, and those of their parents and professionals concerning prosthetic use and rehabilitation treatment. PLoS ONE 8:e67101. doi: 10.1371/journal.pone.0067101
Vasquez Tieck, J. C., Weber, S., Stewart, T. C., Roennau, A., and Dillmann, R. (2019). “Triggering robot hand reflexes with human EMG data using spiking neurons,” in Intelligent Autonomous Systems 15, eds M. Strand, R. Dillmann, E. Menegatti, and S. Ghidoni (Cham: Springer International Publishing), 902–916. doi: 10.1007/978-3-030-01370-7_70
Vergara, M., Sancho-Bru, J., Gracia-Ibáñez, V., and Pérez-González, A. (2014). An introductory study of common grasps used by adults during performance of activities of daily living. J. Hand Ther. 27, 225–234. doi: 10.1016/j.jht.2014.04.002
Vidovic, M. M., Hwang, H.-J., Amsüss, S., Hahne, J. M., Farina, D., and Müller, K. (2016). Improving the robustness of myoelectric pattern recognition for upper limb prostheses by covariate shift adaptation. IEEE Trans. Neural Syst. Rehabil. Eng. 24, 961–970. doi: 10.1109/TNSRE.2015.2492619
Vujaklija, I., Roche, A. D., Hasenoehrl, T., Sturma, A., Amsuess, S., Farina, D., et al. (2017). Translating research on myoelectric control into clinics' are the performance assessment methods adequate? Front. Neurorobot. 11:7. doi: 10.3389/fnbot.2017.00007
Vujaklija, I., Shalchyan, V., Kamavuako, E. N., Jiang, N., Marateb, H. R., and Farina, D. (2018). Online mapping of EMG signals into kinematics by autoencoding. J. Neuroeng. Rehabil. 15:21. doi: 10.1186/s12984-018-0363-1
Waibel, A., Hanazawa, T., Hinton, G., Shikano, K., and Lang, K. J. (1989). Phoneme recognition using time-delay neural networks. IEEE Trans. Acoust. Speech Signal Process. 37, 328–339. doi: 10.1109/29.21701
Wang, C., Guo, W., Zhang, H., Guo, L., Huang, C., and Lin, C. (2020). sEMG-based continuous estimation of grasp movements by long-short term memory network. Biomed. Signal Process. Control 59:101774. doi: 10.1016/j.bspc.2019.101774
Wang, J., Chen, Y., Hao, S., Peng, X., and Hu, L. (2019). Deep learning for sensor-based activity recognition: a survey. Pattern Recognit. Lett. 119, 3–11. doi: 10.1016/j.patrec.2018.02.010
Waris, A., Mendez, I., Englehart, K., Jensen, W., and Kamavuako, E. N. (2019). On the robustness of real-time myoelectric control investigations: a multiday Fitts' law approach. J. Neural Eng. 16:026003. doi: 10.1088/1741-2552/aae9d4
Wei, W., Wong, Y., Du, Y., Hu, Y., Kankanhalli, M., and Geng, W. (2019). A multi-stream convolutional neural network for sEMG-based gesture recognition in muscle-computer interface. Pattern Recognit. Lett. 119, 131–138. doi: 10.1016/j.patrec.2017.12.005
Wu, Y., Zheng, B., and Zhao, Y. (2018). “Dynamic gesture recognition based on LSTM-CNN,” in 2018 Chinese Automation Congress (CAC) (Piscataway, NJ: IEEE), 2446–2450. doi: 10.1109/CAC.2018.8623035
Wurth, S. M., and Hargrove, L. J. (2014). A real-time comparison between direct control, sequential pattern recognition control and simultaneous pattern recognition control using a Fitts' law style assessment procedure. J. Neuroeng. Rehabil. 11:91. doi: 10.1186/1743-0003-11-91
Xia, P., Hu, J., and Peng, Y. (2018). Emg-based estimation of limb movement using deep learning with recurrent convolutional neural networks. Artif. Organs 42, E67–E77. doi: 10.1111/aor.13004
Xiao, F., Chen, Y., and Zhu, Y. (2020). GADF/GASF-HOG:feature extraction methods for hand movement classification from surface electromyography. J. Neural Eng. 17:046016. doi: 10.1088/1741-2552/ab9db9
Yang, D., Gu, Y., Liu, R., and Liu, H. (2014). Dexterous motion recognition for myoelectric control of multifunctional transradial prostheses. Adv. Robot. 28, 1533–1543. doi: 10.1080/01691864.2014.957723
Yang, D., Gu, Y., Thakor, N. V., and Liu, H. (2019). Improving the functionality, robustness, and adaptability of myoelectric control for dexterous motion restoration. Exp. Brain Res. 237, 291–311. doi: 10.1007/s00221-018-5441-x
Yang, K., and Zhang, Z. (2019). “Real-time pattern recognition for hand gesture based on ANN and surface EMG,” in 2019 IEEE 8th Joint International Information Technology and Artificial Intelligence Conference (ITAIC) (Chongqing), 799–802. doi: 10.1109/ITAIC.2019.8785894
Yang, W., Yang, D., Li, J., Liu, Y., and Liu, H. (2018). “EMG dataset augmentation approaches for improving the multi-DOF wrist movement regression accuracy and robustness,” in 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO) (Kuala Lumpur), 1268–1273. doi: 10.1109/ROBIO.2018.8664790
Yosinski, J., Clune, J., Bengio, Y., and Lipson, H. (2014). “How transferable are features in deep neural networks?” in Advances in Neural Information Processing Systems (Montreal, CA), 3320–3328.
Young, A. J., Hargrove, L. J., and Kuiken, T. A. (2011). The effects of electrode size and orientation on the sensitivity of myoelectric pattern recognition systems to electrode shift. IEEE Trans. Biomed. Eng. 58, 2537–2544. doi: 10.1109/TBME.2011.2159216
Yu, B., Zhang, X., Wu, L., Chen, X., and Chen, X. (2020). A novel postprocessing method for robust myoelectric pattern-recognition control through movement pattern transition detection. IEEE Trans. Hum. Mach. Syst. 50, 32–41. doi: 10.1109/THMS.2019.2953262
Zanghieri, M., Benatti, S., Burrello, A., Kartsch, V., Conti, F., and Benini, L. (2020a). Robust real-time embedded emg recognition framework using temporal convolutional networks on a multicore IOT processor. IEEE Trans. Biomed. Circuits Syst. 14, 244–256. doi: 10.1109/TBCAS.2019.2959160
Zanghieri, M., Benatti, S., Conti, F., Burrello, A., and Benini, L. (2020b). “Temporal variability analysis in sEMG hand grasp recognition using temporal convolutional networks,” in 2020 2nd IEEE International Conference on Artificial Intelligence Circuits and Systems (AICAS) (Genova), 228–232. doi: 10.1109/AICAS48895.2020.9073888
Zhai, X., Jelfs, B., Chan, R. H. M., and Tin, C. (2017). Self-recalibrating surface emg pattern recognition for neuroprosthesis control based on convolutional neural network. Front. Neurosci. 11:379. doi: 10.3389/fnins.2017.00379
Zhang, J., Ling, C., and Li, S. (2019a). Emg signals based human action recognition via deep belief networks. IFAC Papers Online 52, 271–276. doi: 10.1016/j.ifacol.2019.12.108
Zhang, X., Chen, X., Li, Y., Lantz, V., Wang, K., and Yang, J. (2011). A framework for hand gesture recognition based on accelerometer and EMG sensors. IEEE Trans. Syst. Man Cybernet. A Syst. Hum. 41, 1064–1076. doi: 10.1109/TSMCA.2011.2116004
Zhang, X., Li, X., Samuel, O. W., Huang, Z., Fang, P., and Li, G. (2017). Improving the robustness of electromyogram-pattern recognition for prosthetic control by a postprocessing strategy. Front. Neurorobot. 11:51. doi: 10.3389/fnbot.2017.00051
Zhang, Z., He, C., and Yang, K. (2020). A novel surface electromyographic signal-based hand gesture prediction using a recurrent neural network. Sensors 20:3994. doi: 10.3390/s20143994
Zhang, Z., Yang, K., Qian, J., and Zhang, L. (2019). Real-time surface EMG pattern recognition for hand gestures based on an artificial neural network. Sensors 19:3170. doi: 10.3390/s19143170
Zia ur Rehman, M., Gilani, S. O., Waris, A., Niazi, I. K., Slabaugh, G., Farina, D., et al. (2018a). Stacked sparse autoencoders for emg-based classification of hand motions: a comparative multi day analyses between surface and intramuscular EMG. Appl. Sci. 8:1126. doi: 10.3390/app8071126
Keywords: hand gesture recognition, prosthesis hand, deep learning, pattern recognition, convolutional neural network, recurrent neural network, surface electromyography
Citation: Li W, Shi P and Yu H (2021) Gesture Recognition Using Surface Electromyography and Deep Learning for Prostheses Hand: State-of-the-Art, Challenges, and Future. Front. Neurosci. 15:621885. doi: 10.3389/fnins.2021.621885
Received: 27 October 2020; Accepted: 23 February 2021;
Published: 26 April 2021.
Edited by:
Michela Chiappalone, Italian Institute of Technology (IIT), ItalyReviewed by:
Can A. Yucesoy, Boğaziçi University, TurkeySimone Tanzarella, Italian Institute of Technology (IIT), Italy
Copyright © 2021 Li, Shi and Yu. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Ping Shi, cHNoaUB1c3N0LmVkdS5jbg==