 Muhammad Nouman Arif1
Muhammad Nouman Arif1 Zaki Ud Din1,2*
Zaki Ud Din1,2* Azhar ul Haq1
Azhar ul Haq1 Khalid Mehmood Cheema3
Khalid Mehmood Cheema3 Ahmad H. Milyani4
Ahmad H. Milyani4 Naeem-ul-Islam5
Naeem-ul-Islam5 Iqra Ashfaq1
Iqra Ashfaq1- 1College of Electrical and Mechanical Engineering, National University of Sciences and Technology, Islamabad, Pakistan
- 2Department of Engineering, Lancaster University, Lancaster, United Kingdom
- 3Department of Electronic Engineering Fatima Jinnah Women University, Rawalpindi, Pakistan
- 4Center of Research Excellence in Renewable Energy and Power Systems, Department of Electrical and Computer Engineering, K. A. CARE Energy Research and Innovation Center, King Abdulaziz University, Jeddah, Saudi Arabia
- 5Department of Computer Science and Engineering and International Bachelors Program in Informatics (IBPI), Yuan Ze University, Taoyuan, Taiwan
Cascaded H-bridge 5-level inverters (CHB-5LIs) have gained significant traction in high-power applications owing to their capacity to produce high-quality output voltage with minimal harmonic distortion. However, their intricate architecture presents notable challenges for fault diagnosis, particularly concerning open switch faults. In this study, we propose a deep learning-based approach for diagnosing open switch faults in CHB-5LIs. We present a simulation model of the CHB-5LI with open switch faults and generate a dataset comprising voltage waveforms for various fault scenarios. Leveraging this dataset, we train a Convolutional-1D Neural Network (CNN-1D) featuring a multi-layer architecture comprising convolutional and fully connected layers, culminating in the Softmax function for classification. Our method achieves an impressive classification accuracy exceeding 98 percent on previously unseen fault scenarios, underscoring the efficacy of our approach for CHB-5LI fault diagnosis. Additionally, we conducted a thorough analysis of CNN-1D performance and compared it with traditional and other deep learning models for fault diagnosis techniques. The accuracy of other deep learning models on the generated dataset is as follows: RNN is 88.9 percent, 1D-ResNet is 88.8 percent, and Time Inception model is 89.4 percent. Simulation results showcase that our proposed CNN-1D based approach surpasses other methods in terms of accuracy and robustness, elucidating the potential of deep learning for fault diagnosis in intricate power electronics systems. The fault diagnosis time for the proposed method as a fault diagnosis tool for the simulation case is 0.060 ms, compared to 0.062 ms for RNN and 0.065 ms for ResNet.
1 Introduction
Cascaded H-Bridge 5-Level Inverters (CHB-5Lıs) have been widely used in high-power applications due to their ability to generate high-quality output voltage with low harmonic distortion. However, fault diagnosis of CHB-5LIs remains a challenging task due to the complexity of their structure and the variety of fault types that can occur. Among the various types of faults that can occur in CHB-5LIs are classified into two categories of i) open switch faults and ii) short circuit faults.
Open switch faults (Anand et al., 2018) occur when one or more switches in the inverter fail to conduct properly, leading to an interruption in the current path. Short circuit faults occur when two or more switches in the inverter conduct simultaneously, creating a direct current path between the DC source and ground. Both types of faults can result in abnormal voltage waveforms and can damage the inverter and connected devices, if not detected and rectified in a timely manner. The main focus of this paper is to diagnose open switch fault in CHB-5LIs.
Open switch faults can lead to significant damage to the inverter and the load and can even pose a safety hazard in some cases. Therefore, early detection and diagnosis of open switch faults is essential for ensuring the reliability and safety of CHB-5LIs in high-power applications. Therefore, the application of fault diagnosis and localization is of great interest in academia and industry.
Moreover, the proposed approach can be extended to diagnose faults in other types of inverters and power electronics systems. Inverters are widely used in renewable energy systems, electric vehicles, and other applications, and fault diagnosis is crucial for maintaining their performance and reliability. Therefore, developing machine learning-based fault diagnosis approaches for other types of inverters and power electronics systems can have significant implications for industry and society.
Different open switch fault diagnosis techniques have been proposed in literature. The existing fault diagnosis techniques can be roughly divided into signal processing based and machine learning based approaches. The signal processing-based approach might be treated as traditional fault diagnosis methods, which rely on signal processing techniques such as wavelet analysis, Fourier analysis, and time-frequency analysis to extract features from the measured voltage or current signals and identify the type and location of faults.
Farhadi and Babaei proposed a topology called cross-switched MLI for reducing the number of power electronic switches Kangarlu and Babaei (2013). The main advantage of this topology is that the utilization of moderate voltage rating switches to avoid the polarity part in its structure; therefore, it is more apt to static volt-ampere reactive generation, magnetic resonance imaging application. This topology is found to be suitable for high voltage applications only.
The ref J. A. Caballero et al. (2017) introduced a 5-level single phase VSI in this paper. This topology includes two switches that are bidirectional. The work was aimed at decreasing the number of components, complexity of the system, and the number of gate drives used. The control strategy for the VSI is formulated using the space vector current controller. This topology meets simple constraints but is unable to decrease the number of components and voltage stress. Masaoud, et al. also proposed a 5-level three phase DC link inverter. The topology aimed to reduce the number of DC sources, gate drives, switches, and the area required for installation. The modulation scheme used in this work is dependent on the switching states of the VSI. However, this topology is not suitable for higher voltage level requirements.
The semiconductor switch fault diagnosis based on motor current Park’s vector pattern for voltage source inverter-fed AC drives is proposed in Mendes. A.M.S and Saraiva (1998) and A.M.S and A.J.M (1999). Since output currents are used in these methods, classification accuracy varies with load. The fault detection in a five-level diode-clamped multilevel inverter using wavelet analysis of output voltages and input DC currents is discussed in Keswani and Ballal (2015) and Keswani and Ballal (2014). Input current varies with loads that may lead to misinterpretation under a large load variation. In Hu (2022), a method to detect the open-circuit fault of loads and semiconductors is discussed. The authors used discrete wavelet transform-based analysis for the classification of fault. The detection of fault is performed with the help of switching pulses and corresponding line voltages. When the fault occurs, the line voltage magnitude will be between the threshold voltage specified and can detect the fault. Once the fault is detected, fault classification algorithms will start working where multi-resolution analysis (MRA) of wavelet transform is used to extract the unique feature of each fault from the measured line voltage.
From the aforementioned it can be concluded that signal processing-based fault diagnosis methods suffers from drawbacks of using mathematical models and signal processing techniques, which can be complex and time consuming. Contrary to the signal processing-based approaches, several machine learning-based methods have been proposed in the existing literature to detect and diagnose faults in CHB-5LIs. The use of machine learning techniques for fault diagnosis in CHB-5LIs is a challenging task due to the complex nature of the system and the various types of faults that can occur.
Machine learning algorithms have been widely used in the power industry, such as Narciso (2020) has presented a comprehensive review of the machine learning algorithms in the power industry to study energy efficiency. In Zhou (2019), a backpropagation neural network with a genetic algorithm is used for fault detection. Bridge arm voltage is selected as the fault diagnosis signal. DC components with fundamentals and harmonics are fed as the input data for the BP neural network. Weights and thresholds of the BP neural network are optimized with the help of a genetic algorithm. This method can detect the individual switch fault effectively, but the computational effort is high.
In Kuraku and Yi (2019), a fuzzy-based fault detection approach is presented to identify single and multiple switch faults in motor drives. The phase current of the drive is employed as a fault identification characteristic; nevertheless, the absence of a systematic methodology and slower reaction are the fundamental limitations of fuzzy logic-based fault detection. Despite fault detection, locating the exact location of the fault in diagonal pairs of switches in CHB MLI is challenging due to the identical fault features. Therefore, there is still a lack of studies in determining the exact location of faulty switches in multiple fault scenarios.
The author in this paper proposed Raj and George (2018), an intelligent FD approach is deployed to locate single switch gate drive faults on CHB MLI. The FD using two distinct machine learning (ML) algorithms, SVM and KNN, is suggested, with the PPCASVM-based ML algorithms providing the most accurate and efficient fault detection. Moreover, the approaches presented in Raj and George (2018), Ali and Che (2021) give SS fault detection in CHB MLI and do not address the faults in multiple switches.
The Support Vector Machine (SVM) model is used along with Relative Principal Component Analysis (RPCA) in X. Hao et al. (2014). This paper proposes a simple and fast diagnostic method for open switch fault in cascaded H-bridge multilevel inverter. The classification algorithm is less complex, and the fault location identification can be done accurately within one cycle of the output voltage. Single switch open fault is analyzed for 5-level CHB MLI.
The existing machine learning based approaches, while showing promise in fault detection and localization, exhibit limitations that necessitate a transition to deep learning. Traditional machine learning struggles to unravel the intricate fault patterns inherent to complex systems like Multilevel Inverters (MLIs). The reliance on manually engineered features impedes its adaptability to the diverse fault scenarios and temporal dependencies present in MLIs. Consequently, the research pivot to deep learning, exemplified by the CNN-1D architecture, becomes crucial to overcome these constraints, enabling automatic feature extraction and enhancing the accuracy and efficiency of fault diagnosis in the realm of CHB MLIs.
The author in this paper Yu et al. (2023a) introduces a novel machine vision approach combining deep CNNs and improved D-S theory for evaluating corrosion and coating defects in coal handling plants. Initially, CNNs analyze structural surface images for defect identification, followed by an enhanced D-S fusion algorithm to combine results from multiple CNNs. The method, validated on a dataset of 3,593 surface images with various defect severities, notably improves recognition accuracy and reduces misclassification rates. Furthermore, robustness tests demonstrate effectiveness even under noise pollution, highlighting the approach’s practical applicability.
In Yu et al. (2023c), a novel deep learning approach to predict the degradation of compressive strength in cement-based materials exposed to sulphate conditions, addressing a significant gap in existing predictive models. A deep convolutional neural network (DCNN) is constructed with optimized hyperparameters through particle swarm optimization, utilizing input variables such as cement content, water-to-cement ratio, sand, sulphate concentration, and exposure temperature. Experimental validation demonstrates superior performance compared to traditional models, offering a promising solution for accurately predicting remaining strength in cement-based materials under sulphate attack, crucial for assessing long-term durability in marine environments.
The author in this paper proposed Yu et al. (2022) an automated vision-based method for identifying surface cracks in concrete structures, aiming to overcome limitations of current manual inspection methods. By utilizing pre-trained CNNs and transfer learning on a dataset of 41,780 concrete surface images, the proposed approach achieves improved crack detection accuracy through decision-level image fusion with a modified Dempster-Shafer algorithm. Validation against single CNN models and robustness testing against various types of noise demonstrate the superiority and practical applicability of the method, showcasing its potential for accurate crack profiling in real-world scenarios.
A novel hybrid framework integrates optimized deep learning models and multi-sensor fusion for diagnosing the condition of concrete arch beams in Yu et al. (2023b). Vibration responses undergo principal component analysis for noise reduction, followed by deep networks based on stacked autoencoders (SAE) at each sensor for initial diagnosis. An enhanced whale optimization algorithm optimizes network parameters, while Dempster-Shafer fusion combines sensor outputs for accurate final diagnosis. Laboratory tests on a miniature Sydney Harbour Bridge component with artificial damages validate the method’s effectiveness in detecting structural damage even with limited sensors and high uncertainties.
The review of existing literature underscores the pressing requirement for advancing fault detection for inverters. The impetus for the proposed research can be succinctly encapsulated as follows:
• Refining Fault Localization: Current fault detection approaches manage to detect faults but struggle to accurately pinpoint the specific location of faults in diagonal pairs of switches within CHB MLI. The inherent similarity in fault features adds complexity to this challenge, leaving a gap in research regarding the precise identification of faulty switches within diverse fault scenarios.
• Addressing Simultaneous Faults: The effectiveness of fault diagnosis can be compromised when attempting to identify simultaneous faults across multiple switches. This shortcoming can lead to incorrect diagnoses and the potential delay of vital reconfigurations, emphasizing the need for improved accuracy in handling such scenarios.
• Holistic Fault Consideration: The severity of faults showcases significant variations contingent upon fault types, locations, and operational contexts. This underscores the necessity for a fault diagnosis scheme capable of swift and accurate detection, and classification across an extensive range of potential fault scenarios.
Through a comprehensive exploration of existing literature, several gaps have emerged in the current fault detection and localization techniques applied to Multilevel Inverters (MLIs). The traditional model-based strategies, signal processing techniques, and metaheuristic methods have all exhibited limitations in delivering robust fault detection, particularly concerning single and double switch faults. Moreover, the evaluation of these techniques often lacks depth, especially in assessing their performance under various fault scenarios.
Moreover, signal processing methods tend to falter in the presence of signal noise. The need for optimization and transformation methods to enhance the accuracy of fault diagnosis becomes evident. To address these challenges, this study shifts its focus towards AI-based fault detection and localization approaches, harnessing the capabilities of CNN-1D architecture. Outlined below are the key contributions made by this research endeavor:
• The primary objective of this study is to introduce an innovative approach utilizing CNN-1D architecture for the fault detection and localization process within the context of Cascaded H-Bridge Multilevel Inverters (CHB MLI), so that it can detect both single and double open circuit faults, effectively accommodating a wide array of fault types, their varying locations, and differing operating conditions.
• The method’s performance is underscored by impressive results. Achieving a high detection accuracy rate, this approach showcases its efficiency in pinpointing the location of single and double open circuit faults.
In this paper, we propose a deep learning-based approach for open switch fault diagnosis in CHB-5LIs using only voltage waveform data. Our approach is based on a convolutional neural network (CNN) architecture that can detect a maximum of two switches faults at a time. The proposed approach can diagnose open switch faults with high accuracy and can help improve the reliability and safety of CHB-5LIs in high-power applications.
The remainder of this paper is organized as follows. Section 2 discusses the brief overview of the structure and operation of CHB-5LIs and discusses the different types of faults that can occur. Section 3 describes the proposed fault diagnosis approach, including the dataset preparation, the CNN architecture, and the training and testing procedures. Section 4 presents the results of the proposed approach and compares them with those of traditional fault diagnosis methods. Finally, Section 5 concludes the paper and discusses future directions for research in this area.
2 Modeling and operation of CHB-5LIs
The Cascaded H-Bridge Multilevel Inverter (CHB MLI), a collaborative interplay unfolds between the h-bridge modules and the low-voltage DC power sources. This collaborative synergy is pivotal in furnishing power levels that can be either elevated or diminished. Such power level adjustments are achieved through the strategic addition or removal of h-bridge modules from the system.
In this intricate orchestration, each h-bridge unit assumes a critical role. Configured with precision, these units generate three distinctive output voltage levels: +Vdc, 0Vdc, and -Vdc. This voltage differentiation is accomplished by meticulously manipulating the connections between the direct current (DC) supply and the load. These connections are facilitated through an array of switch configurations, carefully orchestrated to achieve the desired voltage polarity and amplitude.
In essence, the CHB MLI thrives on the harmonious cooperation between the h-bridge modules and the low-voltage DC power sources. This cooperation empowers the system to effectively tailor power levels according to requirements, thereby enabling a versatile and dynamic energy distribution mechanism.
The structure of CHB-5LIs shown in Figure 1 consists of two H-bridge units connected in series, as in Figure 1 each H-bridge unit consisting of four switches and a DC source. The number of H-bridge units determines the number of output levels, with each level corresponding to a unique combination of switch states. CHB5LIs can achieve a maximum of five output levels, hence the name 5-level inverter. The number of output phase voltage levels m is defined by:
Where n is the number of separated DC sources and m represent the output level of the multi-level inverter.
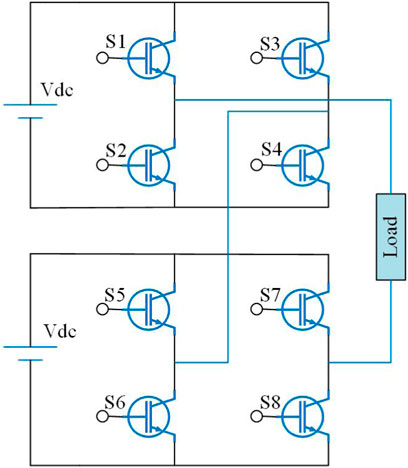
Figure 1. Cascaded H-bridge 5 level inverter switch based structure.
The output voltage levels, and their corresponding switching states are given in Table 1. “1” means the corresponding switch is in ON position and “0” means corresponding switch is in OFF state. Table 1 represent the switching state w.r.t Figure 1.
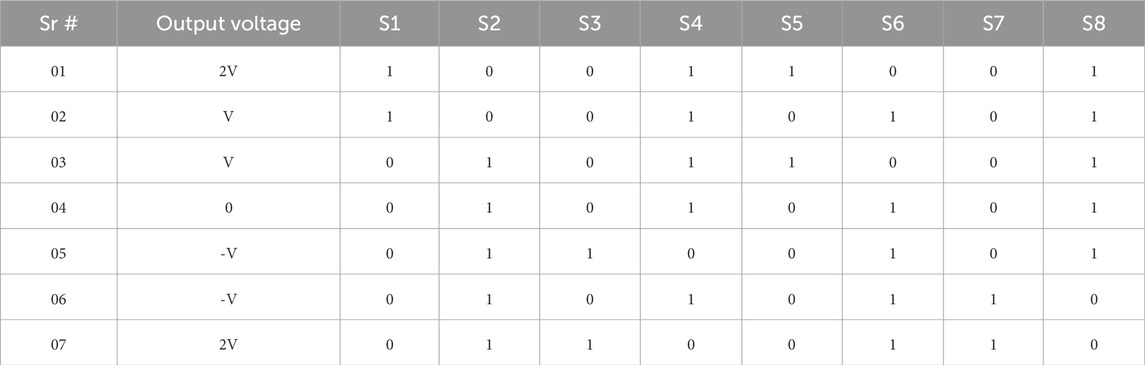
Table 1. Voltage levels and Switching states for CHB-5LI’s.
The operation of CHB-5LIs involves switching the different combinations of switches to achieve the desired output voltage waveform. The switches are controlled using a Pulse Width Modulation (PWM) technique, which adjusts the width of the switch pulses to regulate the output voltage. The PWM technique also helps to reduce the harmonic distortion in the output voltage waveform. The voltage equations for each of the H-bridge modules can be written as follows:
where Vab1 and Vab2 are the voltages across the first and second H-bridge modules, and Vload is voltage across the output load respectively.
To generate PWM signals for a CHB-5LI, we use carrier-based pulse width modulation (PWM) with a sinusoidal carrier waveform. The carrier waveform is used to generate a high-frequency oscillating signal, while the modulation signal is used to control the amplitude of the carrier waveform to generate the desired output voltage.
The modulation signal is typically generated by comparing the desired output voltage with a reference voltage using a feedback control loop. The output of the control loop is then fed into a comparator circuit that compares the modulation signal with the carrier waveform to generate the PWM signal.
The modulation index (m) represents the ratio of the amplitude of the desired output waveform to the maximum amplitude of the fundamental output voltage. It can be calculated as follows:
where Vref is the reference voltage, and Vdc is the DC bus voltage.
The PWM waveform for each H-bridge module can be generated using the following equation:
where i = 1,2 and di is the phase shift of the ith PWM waveform. The values of di are typically chosen such that the switching frequency of the inverter is constant (Figure 2).
Despite their advantages, CHB-5LIs are prone to different types of faults, which can lead to significant damage to the inverter and the connected load, and even pose a safety hazard in some cases. The different types of faults that can occur in CHB-5LIs include open switch faults, short circuit faults, and capacitor voltage imbalances. Open switch faults occur when one or more switches in the H-bridge units fail to operate properly, resulting in an incomplete circuit. This can lead to a high voltage across the faulty switch, which can cause damage to the switch and the connected load. Short circuit faults occur when there is a direct connection between the high voltage and low voltage sides of the inverter, resulting in a high current flow that can damage the switches and the load. Capacitor voltage imbalances occur when there is a difference in the voltage across the capacitors in the H-bridge units, which can lead to unequal sharing of the load and potentially cause damage to the capacitors. Here this paper just focuses on open switch faults with maximum two switches fault detection at a time only.
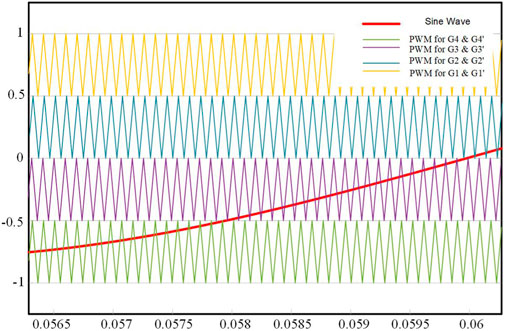
Figure 2. PWM generation for CHB-5LI’s.
2.1 Analysis and impact of open circuit faults
• When there is no switch in faulty state. Then all switches perform well and dilervers the five level at the output. The structure of no switch faulty is shown in Figure 1 and output waveform of CHB-5LI’s, when no switch is in faulty state is shown in Figure 3.
• Single switch fault, which involves the occurrence of an Open Circuit Fault (OCF) at one of the switches S1 to S8 the outcome manifests as a reduction in the peak voltage as shown in Figure 5. This reduction is observed in either the positive or negative voltage levels, contingent upon the position of the affected switch. Consequently, the average peak voltage experiences a decrease. The faulty switch is shown in Figure 4A and the output of single switch number one is shown in Figure 4B.
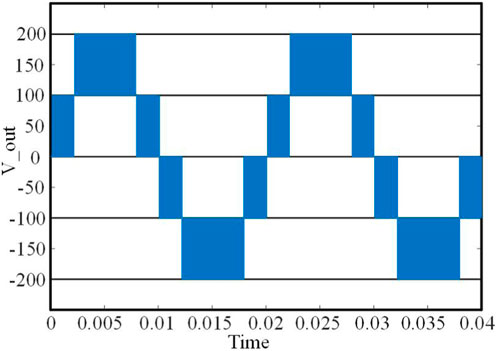
Figure 3. No switch faulty output.

Figure 4. (A) S1 Faulty Switch. (B) Single Switch Faulty Output in CHB-5LI’s.
Double Switch (DS) fault within the Cascaded H-Bridge Multilevel Inverter has a discernible impact on the load voltage. This impact results in a variable output voltage waveform characterized by diminished voltage levels. In the context of this study, these DS faults are classified as intricate and multifaceted anomalies.
The instances of double switch fault cases within the main inverter are systematically organized into three distinct fault classes. This classification approach helps categorize and comprehend the various manifestations of DS faults, contributing to a more comprehensive understanding of their behavior and consequences.
• Failure of diagonal switches such as switches S1 and S4 as shown in Figure 5A, or S2 and S3 leading to open-circuit conditions, a notable outcome is the reduction of peak voltage to 50% V. The occurrence of a Double Switch (DS) fault in this context introduces an element of asymmetry to the output voltage waveform as shown in Figure 5B. This asymmetry results from the unbalanced operation caused by the fault, thereby influencing the overall shape and characteristics of the output waveform.
• Upper or lower switches experience a failure specifically, switches S1 and S3, or S2 and S4 as shown in Figure 6A, resulting in open circuit conditions, a distinct outcome emerges. The peak voltage experiences a reduction during both halves of the cycle. Despite the absence of the two voltage levels due to the fault, an interesting observation is that the voltage waveform maintains its symmetry. This means that, despite the fault-induced reduction in peak voltage, the waveform’s fundamental symmetry is retained as shown in Figure 6B, albeit with altered voltage levels.
• The failure of a leg within the system, when switches within the same leg experience a fault shown in Figure 7A, leads to a distinct outcome. In such instances, the output voltage becomes nullified. This phenomenon sets this particular type of Open Circuit Fault (OCF) apart from other OCF types. Through careful analysis, it becomes evident that the fault characteristics in the output voltage waveform of diagonal switches, upper and lower switches, and leg switches shown in Figure 7B, display notable similarities. Consequently, these fault types are logically grouped together into three distinct categories, based on these shared fault characteristics and patterns.
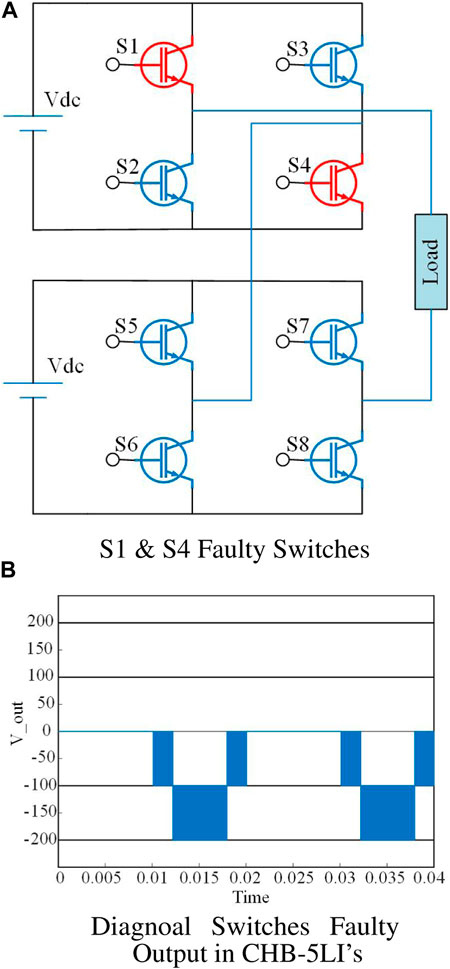
Figure 5. (A) S1 and S4 Faulty Switches. (B) Diagnoal Switches Faulty Output in CHB-5LI’s.
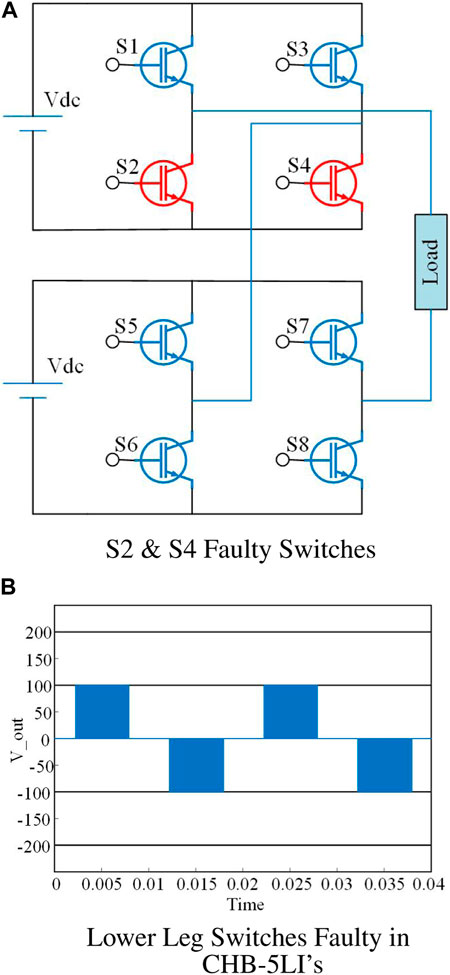
Figure 6. (A) S2 and S4 Faulty Switches. (B) Lower Leg Switches Faulty in CHB-5LI’s.
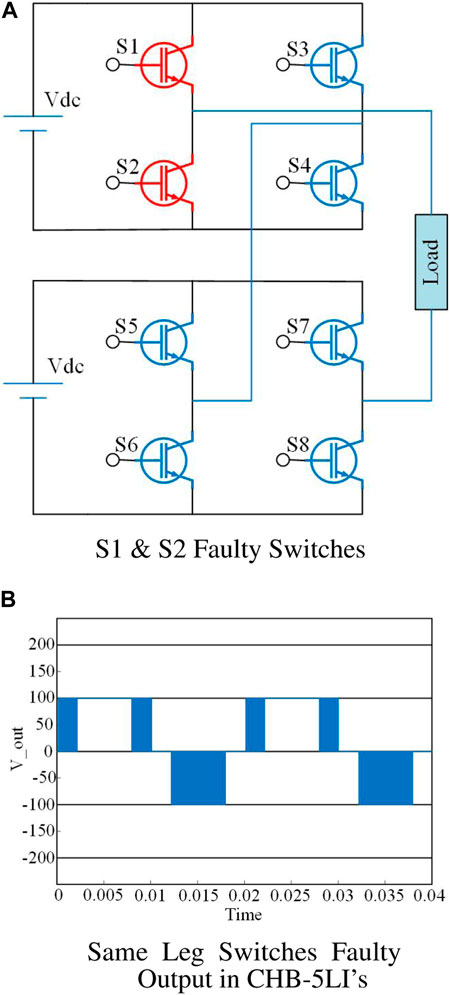
Figure 7. (A) S1 and S2 Faulty Switches. (B) Same Leg Switches Faulty Output in CHB-5LI’s.
Detecting and diagnosing faults in CHB-5LIs is essential for ensuring their reliability and safety in high-power applications. Traditional fault diagnosis methods for CHB-5LIs typically rely on mathematical models and signal processing techniques, which can be complex and time consuming. However, recent advances in deep learning based approaches have shown promising results in fault diagnosis of power electronics systems, including CHB-5LIs.
3 Methodology
The proposed fault diagnosis approach for open switch fault diagnosis of cascaded H-bridge 5-level inverters (CHB-5LIs) using deep learning includes dataset preparation, convolutional neural network (CNN) architecture, and training and testing procedures, the flow of the research is shown in Figure 8.
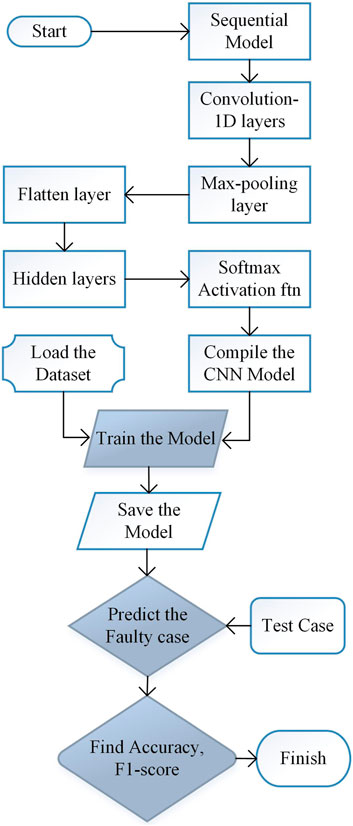
Figure 8. Proposed method flow chart.
The proposed Fault Detection (FD) system for the Cascaded H-Bridge Multilevel Inverter (CHB MLI) using a 1D Convolutional Neural Network (CNN-1D) architecture. The CNN-1D framework is particularly well-suited for sequential data, like the voltage signals collected from the CHB MLI. This architecture leverages the strengths of CNNs while accommodating the nature of time-series data. The proposed method flow chart is shown in Figure 8, this method detect the faulty switches of cascaded h-bridge 5 level inverters using CNN-1D, as discussed in Figure 8.
The input layer of the CNN-1D accepts features such as output voltage, individual h-bridge voltage, and switch pair voltages, extracted from simulation results. The voltage measurements are then preprocessed by normalizing the values to the range of [0,1] to improve the convergence speed of the CNN-1D model during training. These features are sequentially analyzed using 1D convolutional layers. The 1D convolution operation detects temporal patterns and dependencies within the data, crucial for fault feature extraction. The mathematical modeling of a 1D convolutional layer involves the convolution operation and the use of filters or kernels.
Let’s denote the input sequence as X and the filter as W. The convolution operation in a 1D convolutional layer can be expressed as follows:
Here:
• (X∗W)[i] represents the result of the convolution operation at position i.
• K is the size of the filter (also known as the kernel size).
• X [i + k] denotes the value of the input sequence at position i + k.
• W [k] represents the weight of the filter at position k.
Following the convolutions, activation functions like ReLU are applied element-wise to the convolved outputs, injecting non-linearity and allowing the network to learn complex relationships present in the time-series data. The mathematical expression for the ReLU activation function is given by:
This (8) simply returns the input x if it is positive, and it returns 0 for any negative input. The function introduces non-linearity to the model, allowing the neural network to learn complex patterns and relationships in the data during training.
Pooling layers, designed for 1D data, perform downsampling along the time axis. This reduces the computational load and enables the network to focus on salient temporal patterns while retaining their temporal relationships. The mathematical equation for the 1D max pooling operation is given an input sequence X, and a pooling window of size P, the output sequence Y is obtained by selecting the maximum value within each window of size P:
Here:
• Y [i] is the output at position i.
• P is the size of the pooling window.
• X [i × P + k] represents the value of the input sequence at position i × P + k.
The depth of the CNN-1D architecture is determined by the number of hidden layers, the architecture of CNN-1D is given in Figure 9. In this proposal, two hidden layers are employed, each comprising multiple filters. These filters capture distinct temporal features and contribute to the network’s ability to identify fault-related patterns. Subsequently, max average pooling simplifies the feature maps’ temporal dimensions, preserving essential information while further reducing computational demands.
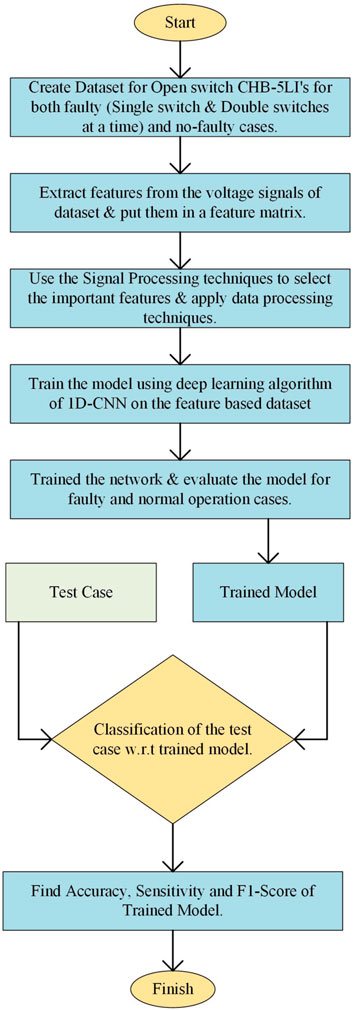
Figure 9. CNN-1D model flow chart.
Fully connected layers follow, which fuse the learned temporal features for decision-making. These layers allow the network to recognize complex temporal patterns and make accurate fault classifications.
Here in this paper we used Adam optimizer as it combines ideas from two other popular optimization algorithms: RMSprop (Root Mean Square Propagation) and Momentum. The purpose of Adam is to provide an adaptive learning rate to different parameters during training, allowing for faster convergence and improved performance. The Adam optimizer maintains two moving averages for each parameter: the first moment (mean) and the second moment (uncentered variance). These moving averages are then used to adaptively adjust the learning rates for each parameter.
Here:
Ultimately, the output layer, activated with suitable functions, generates the classification results. The CNN-1D’s architecture and sequential analysis ensure effective fault detection and diagnosis in the CHB MLI system.
The proposed CNN architecture consists of three convolutional layers, followed by two fully connected layers, and a softmax output layer. Each convolutional layer is followed by a batch normalization layer and a rectified linear unit (ReLU) activation function. The output of the final convolutional layer is flattened and fed into the fully connected layers, which are also followed by batch normalization layers and ReLU activation functions. The softmax output layer is used to classify the faults. Tables 2, 3 shows the size of each layer used in CNN-1D model and total number of parameter used by this model for training.
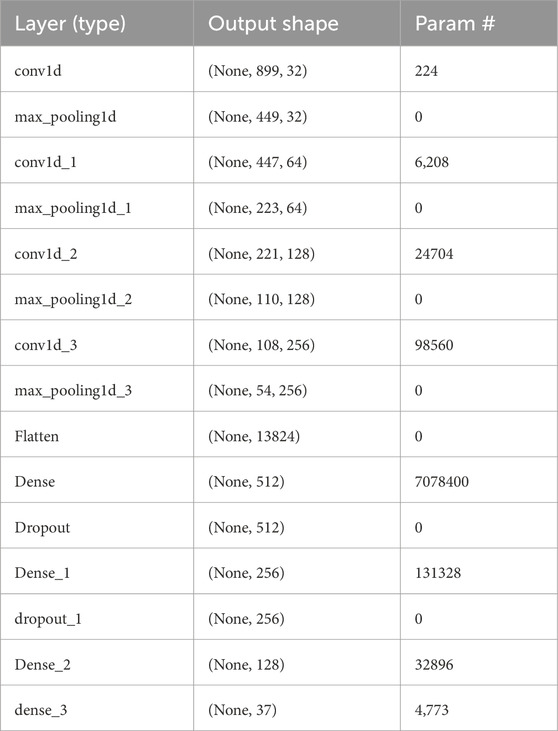
Table 2. Model sequential.
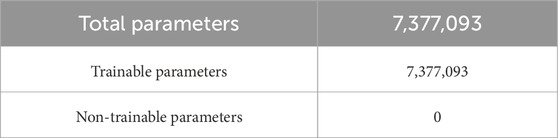
Table 3. Details of parameters.
For training, an extensive dataset containing both normal and faulty conditions is employed. The dataset is partitioned into training, validation, and testing subsets, enabling the network to generalize well. Backpropagation, in conjunction with optimization techniques like Adam or RMSprop, adjusts the network’s weights and biases to minimize the loss, thereby enhancing the network’s capacity to detect faults.
4 Results and discussion
In the section, the study finding of CNN -1D model that was developed for dealing with fault detection in open switch cascaded H-Bridge 5-level inverter are presented. First, we present the evaluation values that will be used to evaluate the proposed CNN-1D algorithm. The accuracy of the model achieve by this model is 98.99% and loss of the model is 0.0177%.
After that, the results of CNN model training and testing are presented in Figures 10A, B respectively which include the findings of model accuracy, and model loss function curves on 20 learning epochs for the proposed deep learning model. This model is trained using Adam optimizer, which acheives better results as compared to other optimzer.
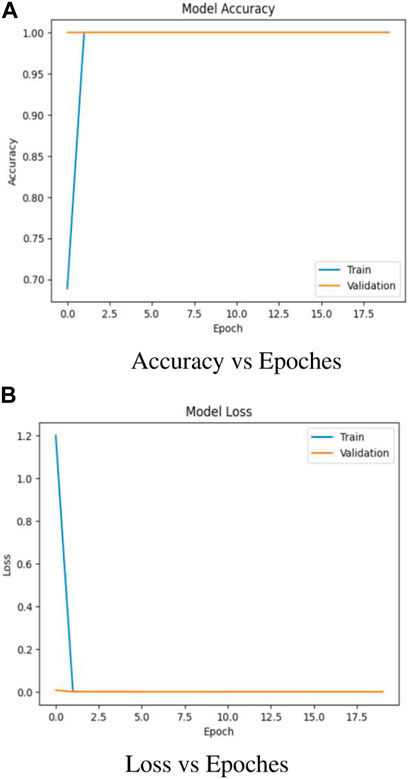
Figure 10. (A) Accuracy vs. Epoches. (B) Loss vs. Epoches. CNN-1D Model.
The test case when switch 1 and 3 are faulty at a time, then the results of performance metrics results is this scenario are shown in Figure 11 and calculated values are shown in Table 4. The Performance metrics are measures used to assess the effectiveness, efficiency, and overall success of a system, process, or activity, here performance metrics for specific case is shared in Figure 11.
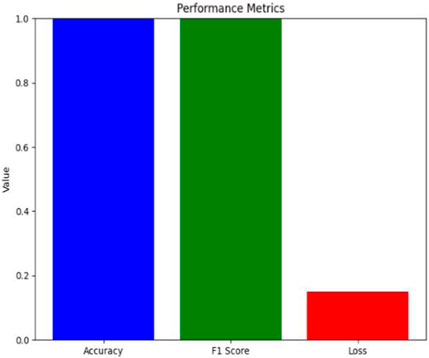
Figure 11. Performance metrics for Switch 1 and 3 faulty.
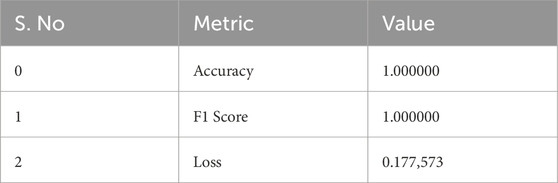
Table 4. Performance metrics for SW faulty 1 and 3
For the comparison purpose, we trained our model using different deep learning techniques, RNNs are designed to process sequential data by maintaining internal memory. A common variant, particularly for sequence classification tasks, is the Long Short-Term Memory (LSTM) or Gated Recurrent Unit (GRU) architecture due to their ability to capture long-range dependencies. For this paper we used three numbers of LSTM layers to capture varying levels of abstraction. The number of hidden units in each LSTM layer can be adjusted based on the complexity of the dataset and computational resources. For training of model we used the sigmod activation function. The learning rate can be determined through experimentation, and first time get common values from literature which is 0.01, in Figures 12A, B demonstrate the model accuracy and model loss respectively for RNN based model on 20 learning epochs with help of Adam optimizer. As shown in Figures 12A, B, we can observe that model accuracy is round about 89% only, the main reason behind is that, RNN used the LSTM method, so for this specific generated dataset, RNN model does not gives as good accuracy as CNN-1D gives.
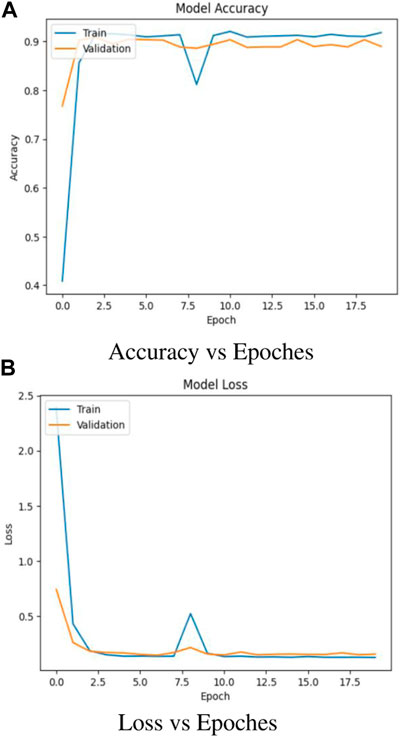
Figure 12. RNN model. (A) Accuracy vs. Epoches. (B) Loss vs. Epoches.
Figures 13A, B demonstrate the model accuracy and model loss respectively for Inception time-based model on 20 learning epochs with help of Adam optimizer. Time inception models are sensitive to the distribution of the training data. If the distribution of the test data differs significantly from the training data, performance may degrade will CNN-1D model does not suffering with this problem.
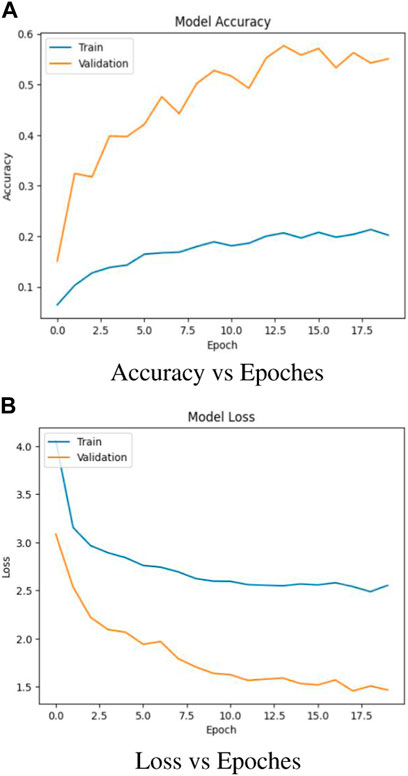
Figure 13. Time inception model. (A) Accuracy vs. Epoches. (B) Loss vs. Epoches.
ResNet is characterized by residual blocks that allow for training very deep networks by mitigating the vanishing gradient problem. ResNet typically consists of several residual blocks stacked on top of each other. The number of blocks and layers within each block can vary depending on the depth of the network desired. Each residual block consists of convolutional layers followed by shortcut connections. Here we experiment with different configurations of convolutional layers and the number of filters in each layer. But the final ResNet model contain four residual block for model training for the generated dataset. ReLU is used as the activation function within each residual block. Batch normalization technique applied before the activation function to improve training stability. Figures 14A, B demonstrate the model accuracy and model loss respectively for 1D-Resnet based model on 20 learning epochs with help of SGD optimizer, the issue with this model for the generated dataset is that with a large number of layers, are prone to overfitting, particularly when the training dataset is limited. Overfitting can result in poor generalization to new, unseen data.
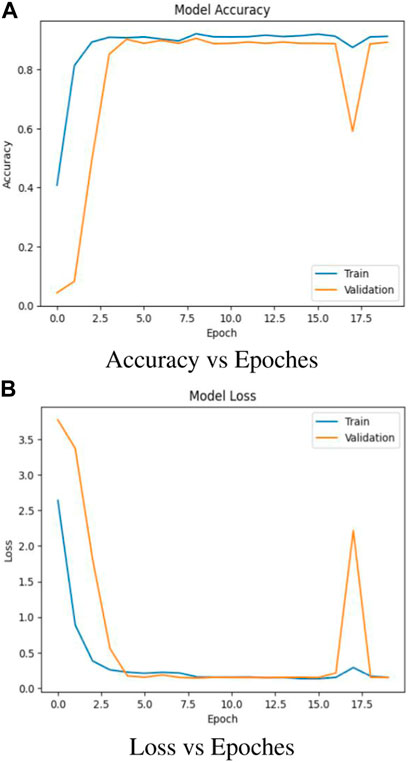
Figure 14. 1D-Resnet model. (A) Accuracy vs. Epoches. (B) Loss vs. Epoches.
We trained different deep learning models on the collected dataset of cascaded H-Bridge 5 level inverter for making comparisons between these models with CNN-1D model. Table 5 below shows the comparison based on accuracy, F-score, and loss. This was done for simplicity of reader for better understanding why we pick CNN-1D over other models.

Table 5. Comparision of different deep learning models.
Evaluation metrics such as accuracy, precision, recall, and F1-score gauge the CNN-1D’s performance in distinguishing normal from faulty conditions. This approach demonstrates the potency of CNN-1D architecture in advancing fault diagnosis and classification for dynamic systems like the CHB MLI over other deep learning models.
In summary, the proposed fault diagnosis approach includes dataset preparation, CNN architecture, and training and testing procedures. The approach is designed to detect open switch faults in CHB-5LIs using voltage measurements only and can also detect maximum two faults at the same time. The proposed approach can achieve high accuracy, precision, recall, and F1-score for fault diagnosis in CHB-5LIs.
5 Conclusion
In conclusion, our proposed approach showed promising results for fault diagnosis in the cascaded H-bridge 5-level inverter using deep learning. The approach was able to diagnose faults accurately and detect multiple faults simultaneously, which is a significant improvement compared to traditional methods. Moreover, the proposed approach was less sensitive to changes in operating conditions and fault types and required less expert knowledge, making it more accessible for practitioners in the field.
Future directions for research in this area is to investigate the performance of the proposed approach with different fault types and operating conditions. While the proposed approach showed promising results for open switch faults, other types of faults such as short-circuits, or overloading may require different approaches or modifications to the existing approach. Additionally, the proposed approach was tested using simulations, and further research can be conducted to evaluate its performance with real-world datasets and experimental setups.
We aim to complement our simulation-based approach with experimental validation to enhance the reliability and applicability of our fault diagnosis method for CHB-5LIs. Specifically, we recognize the need to investigate the impact of saturation and dead time effects, which can potentially exist in practical implementations of CHB-5LIs. Saturation effects may occur due to limitations in the magnetic components or power semiconductor devices, leading to non-linear behavior in the inverter’s operation. Dead time, on the other hand, refers to the duration during which both the high and low side switches of an H-bridge inverter are turned off to prevent shoot-through currents. Understanding the effects of saturation and dead time on the performance of the inverter system is crucial, as they can introduce additional complexities and uncertainties that may influence fault diagnosis accuracy. Therefore, in future investigations, we will explore how saturation and dead time effects manifest in the voltage waveforms and their implications for fault diagnosis. This will involve conducting experimental studies to capture real-world phenomena and validate our simulation findings. By considering these factors, we aim to develop a more comprehensive and robust fault diagnosis methodology for CHB-5LIs that accounts for practical implementation challenges.
Data availability statement
The original contributions presented in the study are included in the article/Supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
MA: Conceptualization, Funding acquisition, Investigation, Methodology, Project administration, Resources, Supervision, Validation, Visualization, Writing–review and editing. ZD: Conceptualization, Data curation, Formal Analysis, Investigation, Methodology, Software, Validation, Writing–original draft, Writing–review and editing. AuH: Formal Analysis, Funding acquisition, Project administration, Resources, Supervision, Validation, Visualization, Writing–review and editing. KC: Data curation, Methodology, Project administration, Resources, Validation, Writing–review and editing. AM: Funding acquisition, Project administration, Resources, Visualization, Writing–review and editing. N-u-I: Data curation, Methodology, Project administration, Software, Supervision, Validation, Visualization, Writing–review and editing. IA: Conceptualization, Data curation, Investigation, Software, Writing–review and editing.
Funding
The author(s) declare that no financial support was received for the research, authorship, and/or publication of this article.
Acknowledgments
The authors would like to express their profound gratitude to King Abdullah City for Atomic and Renewable Energy (K.A.CARE) for their financial support in accomplishing this work. The authors would also like to acknowledge the support provided by King Abdulaziz University, Jeddah, Saudi Arabia.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Ali, A. H., and Che, Z. (2021) Open switch fault diagnosis of cascade h-bridge multi-level inverter in distributed power generators by machine learning algorithms.
A.M.S, M. and A.J.M, C. (1999). Voltage source inverter fault diagnosis in variable speed ac drives by the average current park’s vector approach
Anand, A., Akhil, V. B., Raj, N., Jagadanand, G., and George, S. (2018) An open switch fault detection strategy using mean voltage prediction for cascaded h-bridge multilevel inverters, 1–5.
Hao, X., Jian, Z., Qi, J., and Jingang, H. (2014) Rpca-svm fault diagnosis strategy of cascaded h-bridge multilevel inverters.
Hu, Y. C. (2022) A diagnostic method for open circuit faults of loads and semiconductors in 3l-npc inverters.
Caballero J. A., N. G., Fernández E. F., Soria-Moya A., Almonacid F., Perez-Higueras P.et al. (2017). Analytical transfer equations for the spectral modelling of iii–v multijunction concentrator solar cells. doi:10.1109/cde.2017.7905241
Keswani, S., and Renge, M. M. (2014). Wavelet modulus maxima for single switch open fault in multi-level inverter 42, 889–900. doi:10.1080/15325008.2014.903538
Keswani, S. H. M., and Ballal, M. (2015) Multiresolution analysis for converter switch faults identification.
Kuraku, , and Yi, R. (2019) Fuzzy logic based open-circuit fault diagnosis in igbt for cmli fed pmsm drive.
Mendes, A. M. S., and Saraiva, E. (1998). Voltage source inverter fault diagnosis in variable speed ac drives by park’s vector approach, , doi:10.1049/cp:19980607
Raj, A., and George, S. (2018) Switch fault detection and diagnosis in space vector modulated cascaded h-bridge multilevel inverter.
Yu, Y., Hoshyar, A., Samali, B., Zhang, G., Rashidi, M., and Mohammadi, M. (2023a). Corrosion and coating defect assessment of coal handling and preparation plants (chpp) using an ensemble of deep convolutional neural networks and decision-level data fusion. Neural Comput. Appl. 35, 18697–18718. doi:10.1007/s00521-023-08699-3
Yu, Y., Li, J., Li, J., Xia, Y., Ding, Z., and Samali, B. (2023b). Automated damage diagnosis of concrete jack arch beam using optimized deep stacked autoencoders and multi-sensor fusion. Dev. Built Environ. 14, 100128. doi:10.1016/j.dibe.2023.100128
Yu, Y., Samali, B., Rashidi, M., Mohammadi, M., Nguyen, T. N., and Zhang, G. (2022). Vision-based concrete crack detection using a hybrid framework considering noise effect. J. Build. Eng. 61, 105246. doi:10.1016/j.jobe.2022.105246
Yu, Y., Zhang, C., Xie, X., Yousefi, A. M., Zhang, G., Li, J., et al. (2023c). Compressive strength evaluation of cement-based materials in sulphate environment using optimized deep learning technology. Dev. Built Environ. 16, 100298. doi:10.1016/j.dibe.2023.100298
Keywords: open switch fault diagnosis, cascaded H-bridge 5-level inverter, deep learning, convolutional neural network (CNN), fault detection
Citation: Arif MN, Din ZU, ul Haq A, Cheema KM, Milyani AH, Naeem-ul-Islam and Ashfaq I (2024) Open switch fault diagnosis of cascaded H-bridge 5-level inverter using deep learning. Front. Energy Res. 12:1388273. doi: 10.3389/fenrg.2024.1388273
Received: 19 February 2024; Accepted: 29 April 2024;
Published: 22 May 2024.
Edited by:
Yang Yu, University of New South Wales, AustraliaReviewed by:
Bin Duan, Shandong University, ChinaXutong Zhang, University of Technology Sydney, Australia
Copyright © 2024 Arif, Din, ul Haq, Cheema, Milyani, Naeem-ul-Islam and Ashfaq. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Zaki Ud Din, ei5kaW5AbGFuY2FzdGVyLmFjLnVr, enVkZGluLmNlbWVAY2VtZS5udXN0LmVkdS5waw==