 Yinqian Sun
Yinqian Sun Yi Zeng
Yi Zeng Yang Li
Yang Li- 1Research Center for Brain-Inspired Intelligence, Institute of Automation, Chinese Academy of Sciences, Beijing, China
- 2School of Future Technology, University of Chinese Academy of Sciences, Beijing, China
- 3School of Artificial Intelligence, University of Chinese Academy of Sciences, Beijing, China
- 4National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Sciences, Beijing, China
- 5Center for Excellence in Brain Science and Intelligence Technology, Chinese Academy of Sciences, Shanghai, China
Brain-inspired spiking neural networks (SNNs) are successfully applied to many pattern recognition domains. The SNNs-based deep structure has achieved considerable results in perceptual tasks, such as image classification and target detection. However, applying deep SNNs in reinforcement learning (RL) tasks is still a problem to be explored. Although there have been previous studies on the combination of SNNs and RL, most focus on robotic control problems with shallow networks or using the ANN-SNN conversion method to implement spiking deep Q networks (SDQN). In this study, we mathematically analyzed the problem of the disappearance of spiking signal features in SDQN and proposed a potential-based layer normalization (pbLN) method to train spiking deep Q networks directly. Experiment shows that compared with state-of-art ANN-SNN conversion method and other SDQN works, the proposed pbLN spiking deep Q networks (PL-SDQN) achieved better performance on Atari game tasks.
1. Introduction
Inspired by biological brain neurons, the spiking neural network uses differential dynamics equations and spike information encoding methods to build computing node models in neural networks (Maass, 1997). The traditional artificial neuron models, such as Perceptron and Sigmoids, sum the inputs and pass them through a non-linear activation function as model output. Unlike ANNs, the spiking neurons accept signals from presynaptic inputs with a particular synapses model. They then integrate the post-synaptic potential, firing a spike when the somatic potential exceeds a threshold. The neuron potential is reset when the spike is released to prepare for the next integrate-and-fire process. According to the complex structure and dynamic characteristics of biological neurons, the spiking neuron model has many forms, including the leaky integrated-and-fire (LIF) model, Izhikevich model, Hodgkin-Huxley, and spike response model.
Spike neural networks can be applied to different domains of pattern information processing. SNNs have achieved competitive performance on many tasks compared with ANN. Spiking Resnet is trained for image classification (Fang et al., 2021), and Spiking-YOLO (Kim et al., 2020) uses the ANN-SNN conversion method to implement faster and more efficient object detection. Brain visual pathway-inspired spiking neural networks process image features with biologically plausible computing method (Hopkins et al., 2018). CRSNN (Fang and Zeng, 2021) implemented causal reasoning with SNN and Spike-Timing-Dependent Plasticity (STDP). QS-SNN (Sun et al., 2021) takes advantage of a spatio-temporal property of spike trains and processes complement information with spiking rate and phase encoding. In addition, Zhao et al. (2018) and Cox and Witten (2019) implement basal ganglia-based SNNs models in many decision-making tasks. Besides, using neural networks to decode neuronal spike trains and activity enables an understanding of how the brain processes sensory and behavioral signals. Deep neural networks decoder are used to reconstruct pixel-level image features from two-photon calcium neural signals (Zhang et al., 2022). Additionally, Xu et al. (2022) proposed a DSPD framework to reconstruct multi-modal sensory information from neural spike representations. The neuromorphic hardware based on SNNs, such as TrueNorth (Merolla et al., 2014), SpiNNakers (Furber et al., 2014), and Loihi (Davies et al., 2018) reduces the energy consumption by thousands of times than chips based on traditional computing architecture.
Although there have been previous studies on the combination of SNNs and RL, most focus on robotic control problems with shallow networks and few neurons. Reward-modulated spike-timing-dependent plasticity (R-STDP) is used for training SNN to control robot keeping within the lane. Lele et al. proposed SNN central pattern generators (CPG) and leaned with stochastic reinforcement-based STDP to control hexapod walking (Lele et al., 2020). PopSAN (Tang et al., 2020) trained spiking actors with a deep critic network and validated on OpenAI gym continuous control benchmarks and autonomous robots. This work adopts actor-critic architecture and explores the combination of deep reinforcement learning and spiking neural networks. However, they only achieved implementing actor network with SNN, the critic for state-action value estimation was still using ANN. Therefore, they did not exploit the low-power advantage of implementing SNN. Because of the optimizing hardness and learning latency, agent based on SNN is challenging to be trained in reinforcement learning tasks. ANN-to-SNN conversion method (Rueckauer et al., 2017) is used to implement DQN with a spiking neural network (Patel et al., 2019; Tan et al., 2020). They first trained ANN-based DQN policy and then transferred the network weight to SNN, using SNN to plat Atari game as shown in Figure 1. Zhang et al. (2021) used knowledge distillation to train student SNN with a deep Q network teacher, but the student SNN does not being trained by the RL method with reward and does not interact with the environment.
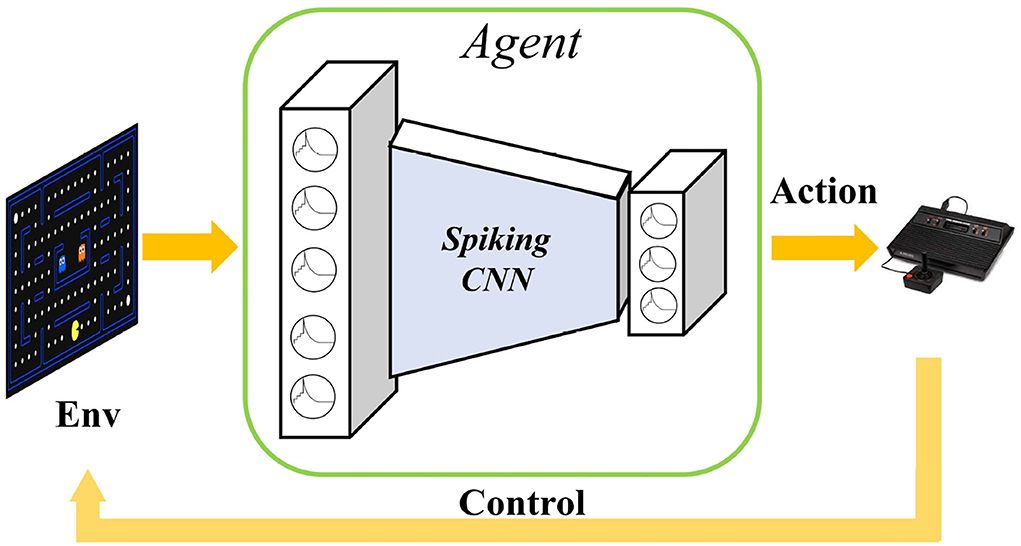
Figure 1. Playing Atari games with spiking neural networks. The raw original video image is input into the spiking convolutional neural networks to extract image features, and finally the action selection implemented by the SNN output layer. The selected action is used to control the activity of the agent in the environment to obtain more rewards.
Direct training of SNNs can obtain better performance advantages than ANNs to SNNs method and improve energy efficiency (Wu et al., 2019; Zheng et al., 2020). Although many successful cases of implementing a directly trained SNNs model in computer vision tasks, the direct training of SNNs in the deep reinforcement learning (DRL) model is facing more difficulty. One of the most important factors hindering the application of SNN in DRL is the disappearance of spike firing activity in deep spiking convolutional neural networks. The studies by Liu et al. (2021) and Chen et al. (2022) proposed direct training methods for spiking deep Q networks in RL tasks, but they do not deal with the vanishing problem in spiking activity in SDQN. In this study, we mathematically analyzed the problem of the disappearance of spiking signal features in SDQN and proposed a potential-based layer normalization (pbLN) method to train spiking deep Q networks directly. Experiments show that our study achieves better performance than SDQN based on the ANNs to SNNs method and other trained spiking DQN models. We summarize our contributions as follows:
• We analyze how the spiking mechanism influences information feature extraction in deep SNNs and found that the binary property of the spike hugely dissipates the variance and shifts the mean of network inputs. The pattern features of information are quickly vanishing in spiking deep Q networks.
• We propose the potential-based layer normalization method to keep the unique sensitivity of spiking neuron in deep Q networks.
• We construct a spiking deep Q network and implement it in gym Atari environments. The spiking deep Q network is directly trained with a surrogate function, and the experiments show that the pbLN improves the performance of SNN in RL tasks.
2. Methods
In this section, we introduce our study with three aspects. First, we construct a spiking deep Q network to estimate state-action value. Second, we analyze the feature vanishing in SNN and its influences on reinforcement learning. Third, we propose the potential-based layer normalization method and train the spiking deep Q network with a backpropagation algorithm.
2.1. Spiking deep Q network
In order to better reflect the characteristics of SNNs in the reinforcement learning environments, we construct our spiking Q networks as same as the DQN architecture shown in Figure 2. Three-layers spiking convolution neural networks process raw game screen images from gym Atari simulation to generate vision embedding. Then the vision embedding spike trains are processed by fully connected (FC) spiking neurons population to output control action. We use weighted spike integration to generate continuous real state-action values from discrete spikes.
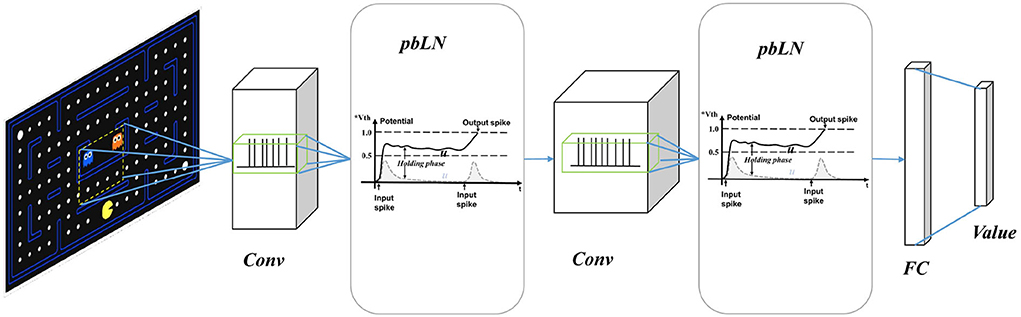
Figure 2. Spiking deep Q network with potential-based layer normalization. It has the same network structure as DQN, with three layers of convolution and two layers of full connection. The network outputs an estimate of the state-action value, which is used for the selection of actions and TD based learning.
The neuron model in the spiking Q Network is adapted from the leaky integrate-and-fire (LIF) model.
where u is membrane potential, and τ is the decay constant. x is postsynaptic potential (PSP). When the membrane potential exceeds thresholds Vth, the neuron fires a spike, and the membrane potential is reset to Vreset. Here, we use Heaviside step function H to implement the spiking procedure, and our model's neuron dynamic process can be described as follows:
Let as decay factor of neuron potential, we get the clear format of Equation 2 as . The represents the number l layer spike outputs. Neuron input xt of convolutional layers in vision processing is a 2D convolution operation on the previous layer's spike features and can be written as:
where wl is kernel weight of l convolutional layer. In the FC layer, xt is the weighted sum of the previous layer spikes:
State-action value is generated from the time-window mean value of weighted sum spikes output from FC layer as Equation (7) and T is the time-windows length of SNN simulation.
Unlike the ANN-SNN conversion based method or SNN-DNN hybrid training, our proposed model is directly optimized using the TD error about the network output with target values as
The proposed deep spiking Q network is directly trained by the Spatio-temporal Backpropagation (STBP) algorithm (Wu et al., 2018). For the final output weight Wi, we have the derivatives:
where δL is Q learning temporal difference
The derivative temporal chain of the networks weight is written as:
At the non-differentiable point of the neuron firing a spike, we use the surrogate function to approximate the derivative of ot with respect to ut as follows:
2.2. The feature information vanishing in spiking neural networks
In the process of deep network training, the change of network parameters will cause a change in the distribution of the network outputs, which is called Internal Covariant Shift (ICS) (Ioffe and Szegedy, 2015). Network parameters in ANN models are updated with training operations such as the gradient descent algorithm. Due to linear transformations and nonlinear activation in each layer, small changes in the low-level network layer will be amplified as the number of network layers deepens, and the network output will also change accordingly. Compared with ANN, SNN has more difficulty in processing information except for the ICS problem. First, unlike the linear transformation of ANN neurons, spiking neurons use kinetic equations to process input signal, which has a large nonlinear characteristic. Second, the spike outputs change the distribution of inputs severely, and the useful features of information are lost in deep layers. Thus, it needs more effort to solve the ICS problem in SNNs.
For N layers SNN, the proceeding procedure can be written as Algorithm 1. Because the spiking neuron model needs to accumulate the membrane potential in the whole simulation time window, the information is processed along both time and space dimensions. Considering the binary distribution of spikes ot, the means of spike E(ot) and variance D(ot) have below property .
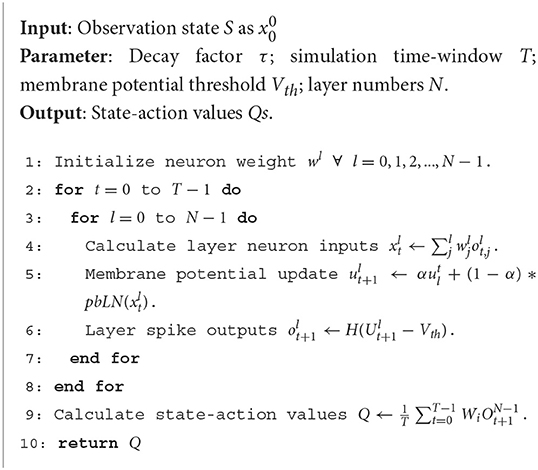
Algorithm 1. Proceeding process of spiking deep Q networks.
LEMMA 1. Let ψ(i, j) = (1−α)2α2(j−i), synapse weight W is randomly initialized with E(W) = 0 and is independent with ot, the variance of neuron potential is calculated as
Supposing the neuron in layer l fired the first spike after t time steps, we denote the variance of neuron membrane potential at time t+1 and layer l as Equation 15. Lemma 1 shows the relationship of neuron membrane potential ut with previous inputs spike history and synaptic weight. Additionally, the presynaptic spike inputs' effect decays with the time factor α for ψ(i, j)∈(0, 1]. Refer to the proofs in Supplementary material for details.
THEOREM 1. Let , the neuron in layer l firing spikes with:
ε is the signal loss ratio transmitted by spiking neural networks. Additionally, if ε < 1, the mean of neuron's spikes E(ot) tends to zero with the increase of the number of layers. The variance of spikes D(ot) is also decreasing, which results in neuronal firing spikes vanishing rapidly and the deep layer of SNNs is very prone to no spiking activity. This problem makes deep SNNs lose signal features in information processing. In addition, in deep spiking convolutional neural networks, which use local connections and sharing weight operations, the spike signal disappearance problem is more prominent. It makes it hard for the deep SCNN to be directly trained and weakens the performance of SNN models.
2.3. Potential based layer normalization
According Equation (16), the problem of spike information vanishing in SNNs can be alleviated by initializing synapse weights with greater distributional variance or setting the spiking neuron model with a little potential threshold. But increasing D(W) will damage performance and make converging the model difficult. Besides, too small threshold potential will make neurons too active to distinguish useful information. To solve this contradiction, some works using the potential normalization methods in spiking neural networks, such as NeuNorm (Wu et al., 2019) using auxiliary neurons to add spikes together and proposing inputs with scalar norm, and tdNorm (Zheng et al., 2020) extending batch normalization to time dimensions.
But these methods are suitable for supervised learning tasks such as image classification or object detection because, in those tasks, the SNNs are trained with batched data inputs. Compared with supervised learning, the environment information of reinforcement learning is more complex. First, in RL tasks spike vanishing problem of deep SNN models is quite serious. For example, we counted each layer's spiking deep Q network firing activity distribution when applied to Atari games. The statistical evidence in the Result section shows that the SDQN suffers serious spiking information reduction in deep layers. Second, unlike supervised learning, SNN agents in RL have no invariant and accurate learning labels and need to interact with the environment to collect data and reward information. The hysteresis of learning samples makes the SDQN model unable to effectively overcome the drawbacks caused by the disappearance of spike signals in output layers. Third, the input format in the RL task is not batched, so the normalization methods used in supervised learning can not be applied to SDQN.
In this study, we propose a potential-based layer normalization method to solve the spike activity vanishing problem in SDQN. We apply the normalization operation methods on PSP xt in convolution layers. The previous layers' spikes are processed as Equation 5 and further normalized as follows:
where in convolution layer H = C× H× W with C for channels number, and [H, W] is the feature's shape in each channel.
PSP xt is normalized into distribution with zero mean and one variance is shown as Equation 17. This normalization method is different from NeuNorm and tdNorm. NeuNorm applied normalization operation on neuron spikes ot. Additionally, tdNorm used batch normalization method on the time dimension, which needs to calculated [xt+1, xt+2, …, xt+T] in advance.
Normalizing xt will weaken the characteristic information in the feature maps, and the zero means and one variance do not suit the spiking neuron. Thus, we adapted the LIF neuron model as:
where λt and βt are learnable parameters, which are initialized at the beginning as Equation 21. The process of pbLN changes the distribution of neural PSP and is depicted in Figure 3. The parameter λt has the same effect of increasing D(W), and βt plays a role in the dynamic firing threshold. By separating the learnable parameters, the SNN model avoids the oscillation of the learning process caused by increasing D(W) and the over-discharge of neurons caused by the threshold being too small, which reduces the information processing capability of the model.
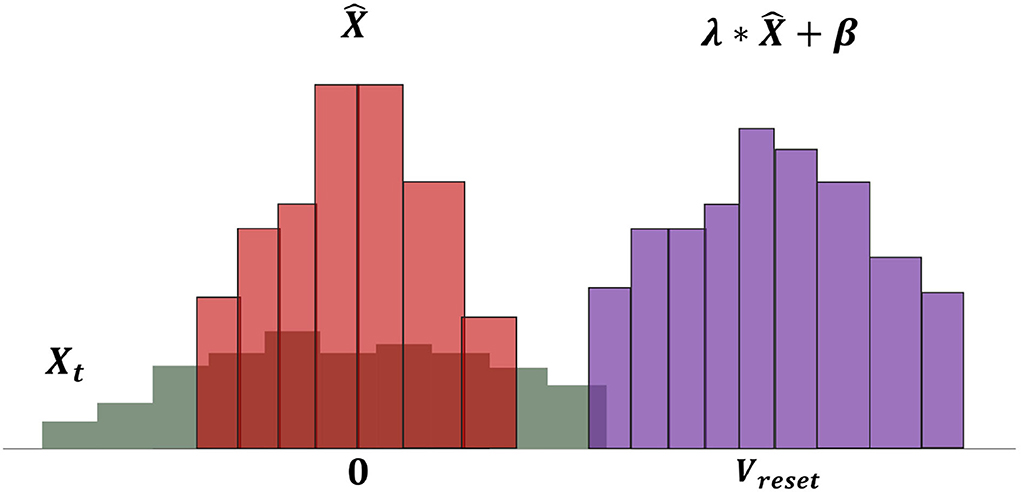
Figure 3. Operations of neural potential-based layer normalization. The bars in the figure represent the distribution of PSP potential. The gray bars show the original PSP potential X, and it is first normalized to zero means and one variance magenta bars. The final shift factor β and scale factor λ make the PSP potential suiting to spiking neurons.
The effect of pbLN on membrane potential is shown in Figure 4. When the spike signal of the previous layer is input, the membrane potential begins to rise. Compared with the LIF model, neurons with the function of pbLN are affected by neighbors and can hold the membrane potential values so that the neuron can fire a spike as long as it receives little input in the future. This puts the neuron in an easy-to-fire state where it can process long-time interval signals and reduces the loss of features when passing on the input information.
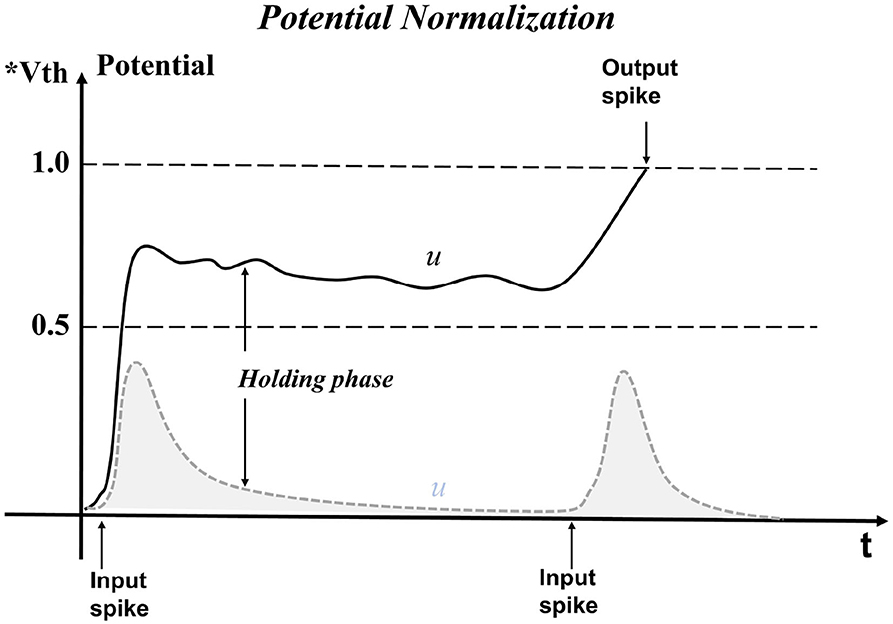
Figure 4. Neuron potential is maintained by the normalization method. The gray dotted line is the change of membrane potential of neurons without normalization when receiving spike inputs. Additionally, the solid black line is neuron potential changed by normalization. Neurons are difficult to fire when the time interval of external stimulation is relatively large. Instead, with normalization operations, the membrane potential is affected by the neighbor neurons, and the leakage trend will slow down, which increases the probability of neurons firing spikes.
3. Results
PL-SDQN is a spiking neural network model based on LIF neurons and has the same network structure as traditional DQN. It contains three convolutional layers with a “c32k8-c64k4-c64k3” neural structure. The hidden layers are fully connected with 512 neurons, and the output is ten values as the weighted summation of the outputs of the hidden layer. We directly trained PL-SDQN on reinforcement learning tasks. The results show that spiking deep Q networks combined with the potential-based layer normalization method can achieve better performance on Atari games than traditional DQN and ANN-to-SNN conversion methods.
3.1. Statistic evidence of spiking activity reduction in deep layers
We counted each layer's firing spikes of SDQN to show the deep layer spike vanish phenomenon and the promoting effect of the pbLN method. The SDQN model is initialized by random synaptic weight and then used to play the Atari game. We calculated the ratio of neurons with firing activity to each layer's total number of neurons.
We tested each game ten times and counted the firing rate of each layer. These experiments' average and SD are shown in Figure 5. The results show that convolution layers in SDQN are difficult to transfer spiking activities. Spikes from the first layer (conv1) are rarely transmitted to the next layer. There is almost no spike firing activity in the second (conv2) and third (conv3) layers.
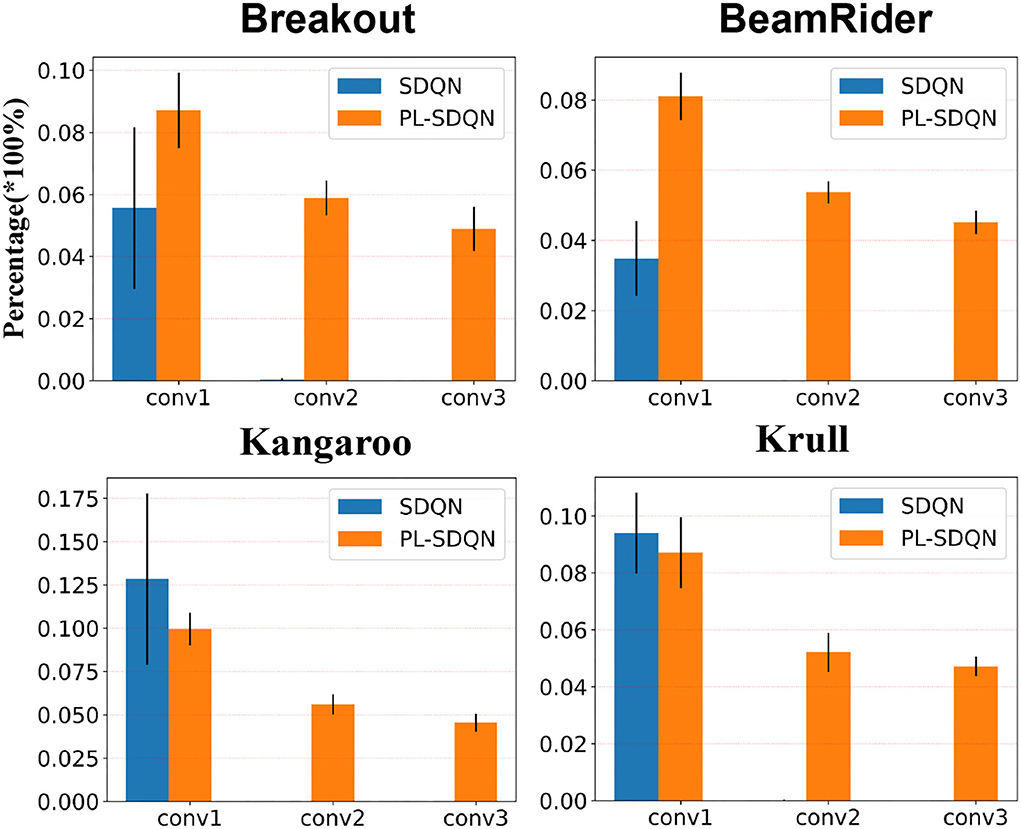
Figure 5. Fire rates on different convolutional layers of SDQN. The blue bars depict the spike fire rate in SDQN without normalization. Additionally, the orange bars are for our model PL-SDQN. The black vertical line on top of each bar is the SD of 10 experimental data.
Compared with the vanishing problems in SDQN, the proposed pbLN method improves the deep layer spiking activities. The bottom rows in Figure 5 show that the pbLN method not only increases the first layer's activity to make later layers fire more spikes it also improves the inner sensitivity of each layer of the network to spike inputs.
3.2. Performance and analysis of Atari games
We compared our model with the vanilla DQN model and ANN-SNN conversion based SDQN model, and the performance are obtained on 16 Atari games. All models are trained directly with the same settings and optimized by Adam's methods as Supplementary Table S1. The ANN-SNN conversion based SDQN implements the same method as the state-of-the-art works proposed by Li and Zeng (2022) with simulation time window Tcon = 256. Additionally, the PL-SDQN is directly trained by the backpropagation method with simulation times set as T = 16. We train all of the models for 20 million frame steps. We conducted ten tests and recorded the mean and SD of scores. The results are shown in Figure 6 and Table 1.
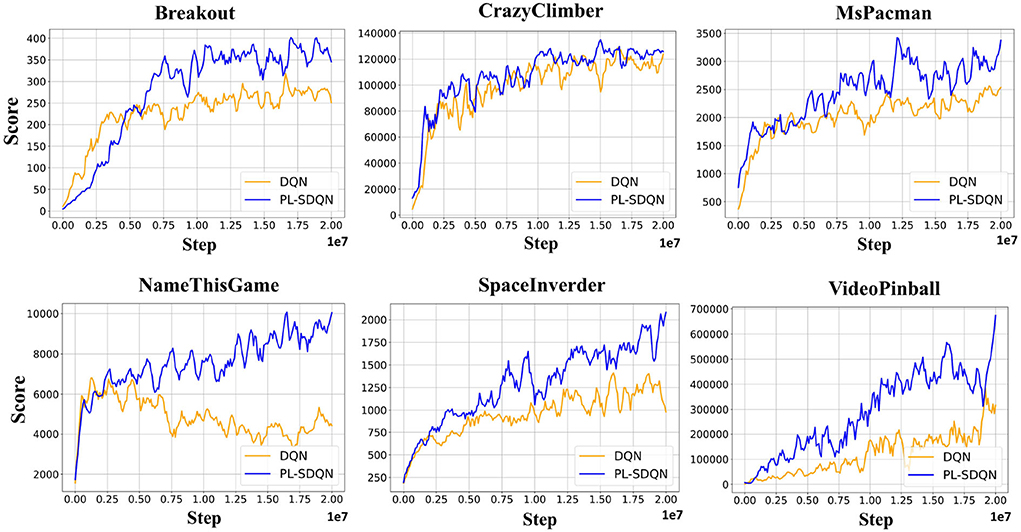
Figure 6. PL-SDQN performance on Atari games. The learning curves in the figure show that our PL-SDQN model achieves faster and better performance than the original DQN benchmarks. Although in the Breakout game, the DQN model learns faster at the beginning, our model catches up with it quickly and achieves better performance at the end. We smooth each curve with a moving average of 5 for clarity.
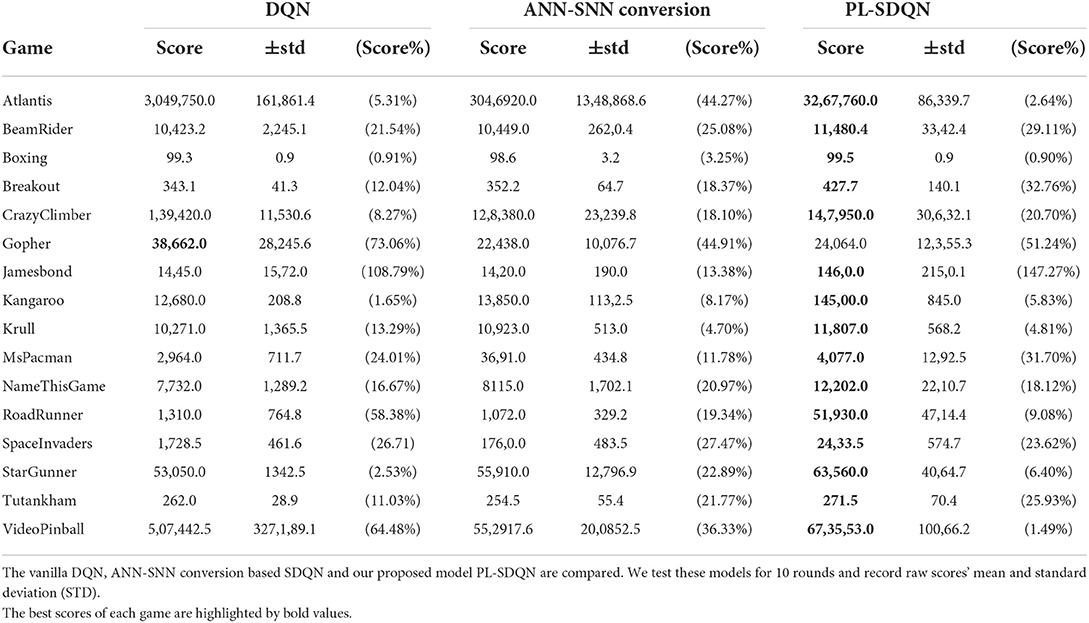
Table 1. Details of Atari game experiments.
PL-SDQN model that we proposed achieves better performance than vanilla DQN and conversion based SDQN model. The data in Table 1 shows that our model has achieved performance advantages over the other two methods in 15 games. Additionally, the curves in Figure 6 show that our method achieves faster and more stable learning than the vanilla DQN.
3.3. Experiments on potential normalization effects
In order to show the improvement of our proposed pbLN method on the spiking deep Q model, we compared PL-SDQN with other directly trained SDQN models in articles by Liu et al. (2021) and Chen et al. (2022). Because the other works compared with different DQN backbones, we recorded the promotion rate of SDQN model scores for the special DQN methods the authors compared in their article.
The result in Table 2 shows that our PL-SDQN model is more robust on different games and achieves better performance than other SDQN methods. Compared with the SNN model in Chen et al. (2022), the PL-SDQN has better generalization and robustness in more experiments for successfully surpassing DQN benchmarks on 14 games out of a total of 15 games tested.
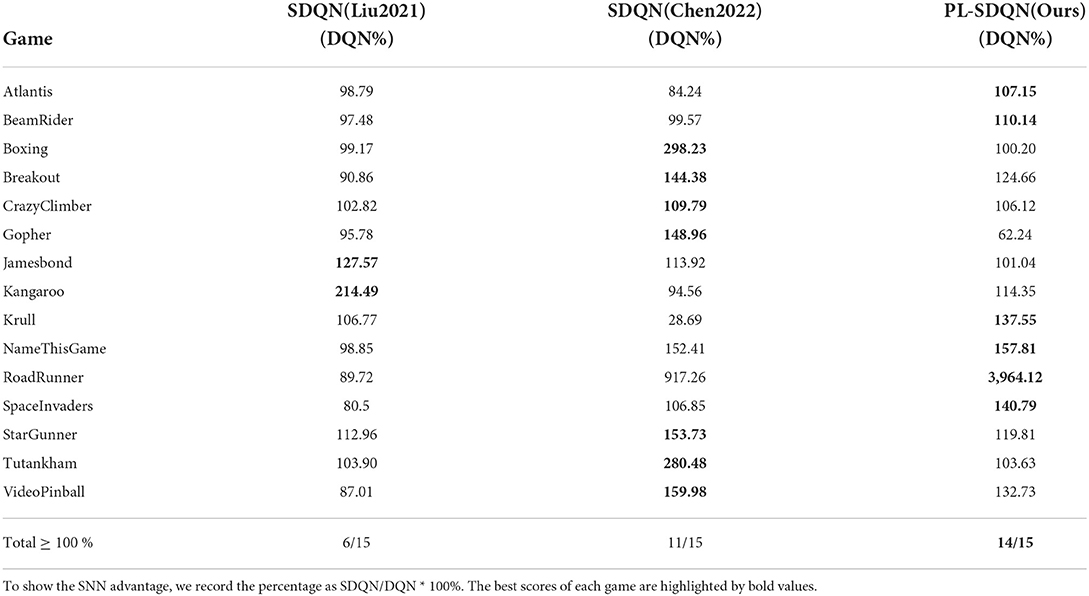
Table 2. The comparison of our PL-SDQN model with state-of-art spiking deep Q networks.
We analyze that our model has an advantage in the test game because the spiking activity vanishing in deep layers of SNN reduces the performance of the SDQN model. The proposed pbLN method can well counteract the impact of the input signal change on the model's performance to improve the ability to spike neural networks in the reinforcement learning task. Unlike PL-SDQN, the SDQN method based on ANN-SNN conversion faces the problem of spike accuracy and requires a long simulation process. The performance of ANN-SNN conversion SDQN is challenging to surpass the original ANN model. The other directly trained SDQN models compared in Table 2 do not focus on the spike information vanishing problem in spiking neural networks. Although the layer normalization method weakens the specificity of the convolutional layer channels, it helps boost the spiking convolution neural network's performance for increasing neuronal activity.
The primary computational consumption of potential-based layer normalization is concentrated in the features mean and variance calculation. The computational complexity of mean and variance operation is and severally. Thus, we can get the pbLN method's computational complexity as . Except for the SDQN model, the pbLN method can be used for other SNN models that do not process data in large batch format, such as recurrent spiking neural networks and SNNs for robot control tasks.
4. Discussion and conclusion
In this study, we directly trained the deep spiking neural networks on the Atari game reinforcement learning task. Because of the characteristics of discrete bias and the hard optimization problem, spiking neural network is difficult to apply to the reinforcement learning field in complex scenarios. We mathematically analyze why spiking neural networks are difficult to generate firing activity and propose a potential based layer normalization method to increase spiking activity in deep layers of SNN. This method can increase the firing rate of the deep spiking neural network so that the input information features can be transferred to the output layer. Additionally, the experiment results show that compared with vanilla DQN and ANN-SNN conversion based SDQN methods, our PL-SDQN model achieves better task performance. Besides, our model has better generalization and robustness compared to other directly trained SDQN methods on Atari game reinforcement learning tasks.
Data availability statement
The original contributions presented in the study are included in the article/Supplementary material, further inquiries can be directed to the corresponding author. Source code can be found in https://github.com/BrainCog-X/Brain-Cog/tree/main/examples/decision_making/RL.
Author contributions
YS wrote the code, performed the experiments, analyzed the data, and wrote the manuscript. YZ proposed and supervised the project and contributed to writing the manuscript. YL participated in helpful discussions and contributed to part of the experiments. All authors contributed to the article and approved the submitted version.
Funding
This study was supported by the National Key Research and Development Program (Grant No. 2020AAA0104305), the Strategic Priority Research Program of the Chinese Academy of Sciences (Grant No. XDB32070100), and the National Natural Science Foundation of China (Grant No. 62106261).
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The handling editor Z-GH declared a shared affiliation with the authors at the time of review.
Publisher's note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fnins.2022.953368/full#supplementary-material
References
Chen, D., Peng, P., Huang, T., and Tian, Y. (2022). Deep reinforcement learning with spiking q-learning. arXiv preprint arXiv:2201.09754. doi: 10.48550/arXiv.2201.09754
Cox, J., and Witten, I. B. (2019). Striatal circuits for reward learning and decision-making. Nat. Rev. Neurosci. 20, 482–494. doi: 10.1038/s41583-019-0189-2
Davies, M., Srinivasa, N., Lin, T.-H., Chinya, G., Cao, Y., Choday, S. H., et al. (2018). Loihi: a neuromorphic manycore processor with on-chip learning. IEEE Micro 38, 82–99. doi: 10.1109/MM.2018.112130359
Fang, H., and Zeng, Y. (2021). “A brain-inspired causal reasoning model based on spiking neural networks,” in 2021 International Joint Conference on Neural Networks (IJCNN) (Shenzhen: IEEE), 1–5.
Fang, W., Yu, Z., Chen, Y., Huang, T., Masquelier, T., and Tian, Y. (2021). “Deep residual learning in spiking neural networks,” in Advances in Neural Information Processing Systems 34 (Shenzhen).
Furber, S. B., Galluppi, F., Temple, S., and Plana, L. A. (2014). The spinnaker project. Proc. IEEE 102, 652–665. doi: 10.1109/JPROC.2014.2304638
Hopkins, M., Pineda-García, G., Bogdan, P. A., and Furber, S. B. (2018). Spiking neural networks for computer vision. Interface Focus 8, 20180007. doi: 10.1098/rsfs.2018.0007
Ioffe, S., and Szegedy, C. (2015). “Batch normalization: accelerating deep network training by reducing internal covariate shift,” in International Conference on Machine Learning (Lille: PMLR), 448–456.
Kim, S., Park, S., Na, B., and Yoon, S. (2020). Spiking-yolo: spiking neural network for energy-efficient object detection. In Proc. AAAI Conf. Artif. Intell. 34, 11270–11277. doi: 10.1609/aaai.v34i07.6787
Lele, A. S., Fang, Y., Ting, J., and Raychowdhury, A. (2020). “Learning to walk: spike based reinforcement learning for hexapod robot central pattern generation,” in 2020 2nd IEEE International Conference on Artificial Intelligence Circuits and Systems (AICAS) (Genova: IEEE), 208–212.
Li, Y., and Zeng, Y. (2022). Efficient and accurate conversion of spiking neural network with burst spikes. arXiv preprint arXiv:2204.13271. doi: 10.24963/ijcai.2022/345
Liu, G., Deng, W., Xie, X., Huang, L., and Tang, H. (2021). Human-level control through directly-trained deep spiking q-networks. arXiv preprint arXiv:2201.07211. doi: 10.48550/arXiv.2201.07211
Maass, W. (1997). Networks of spiking neurons: the third generation of neural network models. Neural Networks 10, 1659–1671. doi: 10.1016/S0893-6080(97)00011-7
Merolla, P. A., Arthur, J. V., Alvarez-Icaza, R., Cassidy, A. S., Sawada, J., Akopyan, F., et al. (2014). A million spiking-neuron integrated circuit with a scalable communication network and interface. Science 345, 668–673. doi: 10.1126/science.1254642
Patel, D., Hazan, H., Saunders, D. J., Siegelmann, H. T., and Kozma, R. (2019). Improved robustness of reinforcement learning policies upon conversion to spiking neuronal network platforms applied to atari breakout game. Neural Networks 120, 108–115. doi: 10.1016/j.neunet.2019.08.009
Rueckauer, B., Lungu, I.-A., Hu, Y., Pfeiffer, M., and Liu, S.-C. (2017). Conversion of continuous-valued deep networks to efficient event-driven networks for image classification. Front. Neurosci. 11, 682. doi: 10.3389/fnins.2017.00682
Sun, Y., Zeng, Y., and Zhang, T. (2021). Quantum superposition inspired spiking neural network. iScience 24, 102880. doi: 10.1016/j.isci.2021.102880
Tan, W., Patel, D., and Kozma, R. (2020). Strategy and benchmark for converting deep q-networks to event-driven spiking neural networks. arXiv preprint arXiv:2009.14456. doi: 10.48550/arXiv.2009.14456
Tang, G., Kumar, N., Yoo, R., and Michmizos, K. P. (2020). Deep reinforcement learning with population-coded spiking neural network for continuous control. arXiv preprint arXiv:2010.09635. doi: 10.48550/arXiv.2010.09635
Wu, Y., Deng, L., Li, G., Zhu, J., and Shi, L. (2018). Spatio-temporal backpropagation for training high-performance spiking neural networks. Front. Neurosci. 12, 331. doi: 10.3389/fnins.2018.00331
Wu, Y., Deng, L., Li, G., Zhu, J., Xie, Y., and Shi, L. (2019). Direct training for spiking neural networks: faster, larger, better. Proc. AAAI Conf. Artif. Intell. 33, 1311–1318. doi: 10.1609/aaai.v33i01.33011311
Xu, Q., Shen, J., Ran, X., Tang, H., Pan, G., and Liu, J. K. (2022). Robust transcoding sensory information with neural spikes. IEEE Trans. Neural Netw. Learn. Syst. 33, 1935–1946. doi: 10.1109/TNNLS.2021.3107449
Zhang, L., Cao, J., Zhang, Y., Zhou, B., and Feng, S. (2021). Distilling neuron spike with high temperature in reinforcement learning agents. arXiv preprint arXiv:2108.10078. doi: 10.48550/arXiv.2108.10078
Zhang, Y., Bu, T., Zhang, J., Tang, S., Yu, Z., Liu, J. K., et al. (2022). Decoding pixel-level image features from two-photon calcium signals of macaque visual cortex. Neural Comput. 34, 1369–1397. doi: 10.1162/neco_a_01498
Zhao, F., Zeng, Y., and Xu, B. (2018). A brain-inspired decision-making spiking neural network and its application in unmanned aerial vehicle. Front. Neurorobot. 12, 56. doi: 10.3389/fnbot.2018.00056
Keywords: brain-inspired decision model, SDQN, reinforcement learning, potential normalization, spiking activity
Citation: Sun Y, Zeng Y and Li Y (2022) Solving the spike feature information vanishing problem in spiking deep Q network with potential based normalization. Front. Neurosci. 16:953368. doi: 10.3389/fnins.2022.953368
Received: 26 May 2021; Accepted: 29 July 2022;
Published: 25 August 2022.
Edited by:
Zeng-Guang Hou, Institute of Automation (CAS), ChinaReviewed by:
Daniel Saunders, University of Massachusetts Amherst, United StatesQi Xu, Dalian University of Technology, China
Copyright © 2022 Sun, Zeng and Li. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Yi Zeng, eWkuemVuZ0BpYS5hYy5jbg==
†These authors have contributed equally to this work and share first authorship