 Anand Kumar Mishra
Anand Kumar Mishra Emanuela Del Dottore
Emanuela Del Dottore Ali Sadeghi
Ali Sadeghi Alessio Mondini
Alessio Mondini Barbara Mazzolai
Barbara Mazzolai- 1Center for Micro-BioRobotics, Istituto Italiano di Tecnologia, Pontedera, Italy
- 2The BioRobotics Institute, Scuola Superiore Sant’Anna, Pontedera, Italy
In this paper, we describe the conceptual design and implementation of the Soft Compliant Manipulator for Broad Applications (SIMBA) manipulator, which is designed and developed for participating in the RoboSoft Grand Challenge 2016. In our novel design, we have proposed (1) a modular continuum arm with independent actuation units for each module, to increase maintainability; (2) a soft reconfigurable hand, for a better adaptation of the fingers to objects of different shapes and size; (3) a moving base for increasing the workspace. We used a hybrid approach in designing and manufacturing by integrating soft and hard components, in both materials and actuation, providing high lateral stiffness in the arm through flat springs, soft joints in fingers for more compliancy and tendon-motor actuation mechanism providing flexibility but at the same time precision and speed. The SIMBA manipulator has demonstrated excellent grasping and manipulation capabilities by being able to grasp objects with different fragility, geometry, and size; and by lifting objects with up to 2 kg of weight it demonstrate also to be robust and reliable. The experimental results pointed out that our design and approach can lead to the realization of robots able to act in unknown and unstructured environments in synergy with humans, for a variety of applications where compliancy is fundamental, preserving robustness and safety.
Introduction
Manipulation tasks in unstructured environments are still challenging for roboticists both in grasping of unknown objects and arm displacement or positioning. Classical manipulators such as Kuka,1 Baxter,2 and COMAU3 are excellent in performing precise and repetitive work in well-defined environments, where the high precision of the manipulators can be exploited in many applications, such as packaging, manufacturing, and in automotive industry. However, these manipulators lose their efficiency in unstructured and undefined environments where the size and positions of the obstacles are unknown. Hyper-redundant manipulators based on rigid joints can potentially work in unstructured environments, but their rigid structure can have an unsafe interaction with humans and objects. Recently, the soft robotics community is proposing a new paradigm for approaching challenges of real environment–robot interactions by promoting the employment of low inertial components and flexible materials for instance, with the aim of realizing conformable and adaptable systems while improving safety (Kim et al., 2013; Majidi, 2014).
Continuum arms, a particular class of robotic arms based on the concept of compliancy and generally actuated by tendon motor or flexible fluidic actuators (Webster and Jones, 2010) show good performance in unstructured environments. The first example of continuum arm was the tensor arm (Anderson and Horn, 1967) that was composed of a series of plates interconnected by universal joints driven by tendons. In recent years, bio-inspired solutions have also been proposed: the OctArm (Grissom et al., 2006), an octopus inspired arm composed of three modules of pneumatic muscles actuators (McKibben actuators) and its improvement (Neppalli and Jones, 2007); another octopus arm (Laschi et al., 2009) made purely with soft materials and actuated by tendon (Cianchetti et al., 2011) or by Shape Memory Alloy (Laschi et al., 2012); the elephant trunk manipulator with elastic connection between joints actuated by tendons (Cieslak and Morecki, 1999; Hannan and Walker, 2003); and the Air-Octor (McMahan et al., 2005) by using a rubber tube for the trunk and cable actuation, reducing complexity of fabrication and increasing flexibility. Regarding grippers, soft robotics demonstrated to be prone at solving problems related to the uncertainty of the objects shape. They mainly rely on the passive deformation property of soft materials. This passive deformation is an advantage not only for the adaptation of different shapes of the objects but also for reducing the control complexity on the grasping task. One example of soft gripper is PneuFlex (Deimel and Brock, 2015), an underactuated anthropomorphic soft hand based on pneumatic continuum actuator. But there are other soft grippers that are showing the same adaptability and ability to handle a wide range of different objects, for instance proposing the exploitation of a tendon-based mechanism combined with soft materials (Manti et al., 2015) and underactuated soft grippers based on passive elastic joints, embedding elastomers and tendon (Odhner and Dollar, 2011), or using antagonistic springs (Odhner et al., 2012).
However, even soft robotics shows its limitation, for instance, in the low maneuverability of the arms, in the low accuracy on positioning the end-effectors, and in the lacking of control strategies in 3D dynamics (Jones and Walker, 2006) excluding this approach for applications requiring high precision.
A combination of soft and classical technologies could be a third alternative, overcoming the challenges of both soft and rigid robotics. For instance, Takeuchi and Watanabe (2010) used this hybrid approach developing a tendon actuated multi-fingered robot hand, which has the ability to change the stiffness of the skin at the fingers tip, obtaining different effects on grasping and manipulation according to skin stiffness.
In the present paper, we describe our Soft Compliant Manipulator for Broad Applications (SIMBA) robot, which is purposively designed and developed for the RoboSoft Grand Challenge 2016 (Manipulation Scenario). The aim of this challenge was to compare and discuss the different solutions extracted from the soft robotic principles to overcome problems that can be found performing common manipulation tasks (Figure 1): arm positioning, door opening, and picking and placing of unknown objects. For this purpose, we developed a novel modular arm and a reconfigurable gripper, based on soft robotic principles such as soft actuators and soft materials, providing the robot with compliancy and flexibility to better accomplish the proposed tasks.
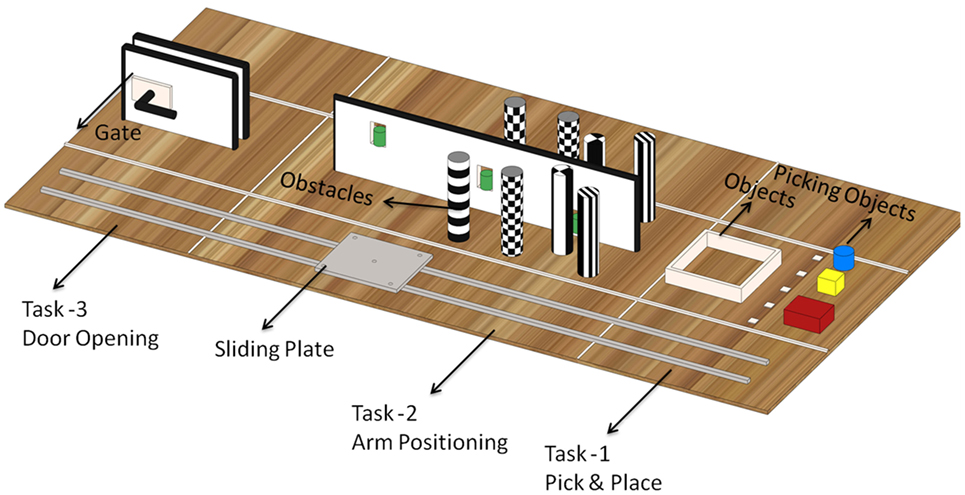
Figure 1. Scenario of manipulation tasks, proposing from left to right: opening the door; reaching a can with the arm positioned in different conditions (without and with obstacles at different positions); and picking and placing of unknown objects. All the distances and constrains were provided in the guidelines of the Challenge.
In the following, we first present the conceptual novel design of the gripper and the soft modular continuum arm, together with their working principles (see Conceptual Design of the SIMBA Manipulator); then, the fabrication process and control (see Fabrication and Control); the results achievable by our robot in each task proposed by the challenge (see Experiments and Results); and finally, we provide some discussions and conclusions (see Discussions and Conclusion).
Conceptual Design of the SIMBA Manipulator
The SIMBA robot consists of three main hardware components: (1) a soft gripper for grasping; (2) a modular soft continuum arm for bending, lifting, and in general for performing manipulation; (3) a prismatic slider for forward or backward movements (Figure 2). The main features considered for designing the robot are lightweight robot, broad workspace, simple fabrication, modular design, and soft actuation. Arm and gripper are tendon-driven mechanisms actuated by DC gear motors, and both these robot components incorporate reconfigurability in their design, feature that significantly improves grasping and manipulation in unstructured environments. A detailed design of each component is here presented together with the description of the functionalities.
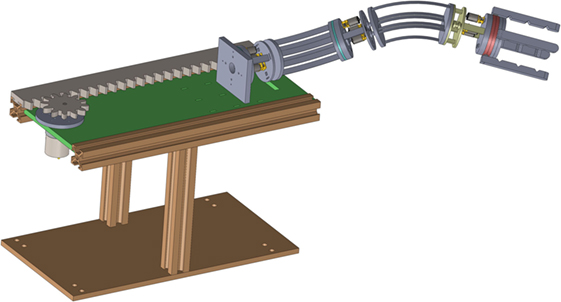
Figure 2. Conceptual design of the Soft Compliant Manipulator for Broad Applications (SIMBA).
The Modular Soft Continuum Arm
The continuum arm (Figure 3A) is composed of two modules each of which is divided into two units (Figures 3B–D): (1) the actuation unit and (2) the bending unit. Each arm module can indeed bend independently from the other, from −90° to +90°, and rotate respect to the central axes, covering all three dimensional workspace. This peculiarity of the design allows the assembled arm to reach a maximum bending of 180° in plane.
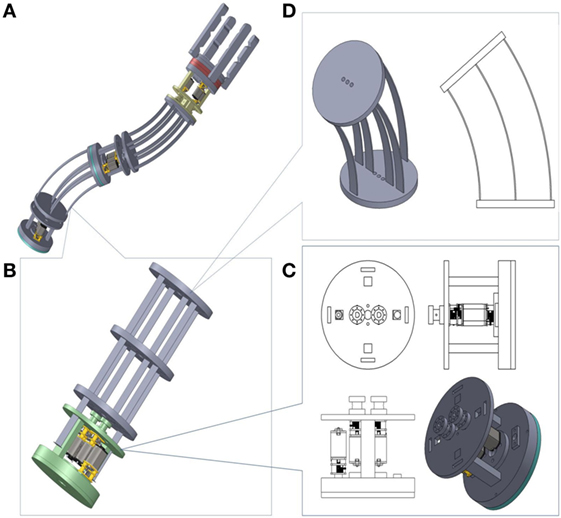
Figure 3. (A) A design overview of the SIMBA manipulator which is composed of two arm modules plus the gripper module; (B) a single arm module that is composed of two units; (C) actuation unit; (D) bending unit. Each arm module has a diameter of 60 mm, a length of 180 mm (110 mm bending unit and 70 mm actuation unit), and a weight of 150 g.
The bending unit has a central support of four soft flat springs and two lateral supports composed of a soft flat spring, permitting full bending in the plane and blocking the movement in the perpendicular direction (Figure 3C). The soft flat springs have the ability to sustain the bending in one direction providing high stiffness on the opposite side and avoiding the buckling of the module. The bending is actuated by a tendon-driven mechanism: a tendon passes through three disks composing the module arm (one tendon on left and one on the right of each module) for the whole length of the module, rolled around the pulley which is connected to the DC gear motor and pulled or released according to the motor movement. In order to guarantee different displacement of the wires and to regulate the stiffness of the module, each tendon of the module is actuated by its own motor (over actuated mechanism).
The Underactuated Soft Gripper
The gripper (Figure 4A) consists of four soft fingers connected to a reconfiguration mechanism (Figure 4C) and an independent actuation module (Figure 4B). The actuation module embeds the actuators for the opening and closing of the fingers and fingers relative rotation.
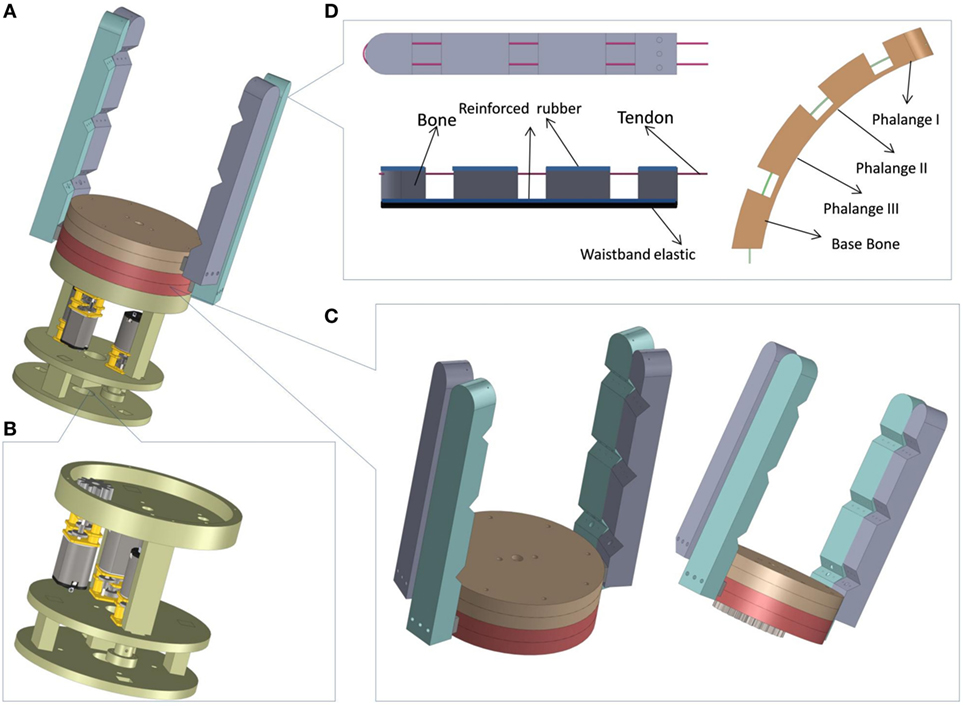
Figure 4. (A) Design of the soft gripper; (B) actuation module; (C) gripper with reconfiguration mechanism; (D) single soft finger design, third phalange is 15 mm × 10 mm × 12 mm, second and first are 20 mm × 10 mm × 10 mm. Each finger is 100 mm × 10 mm × 10 mm, and disks of the reconfiguration mechanisms have 60 mm diameter and 16 mm thickness.
The reconfiguration mechanism has been designed on the sliding principle of two parallel plates. The fingers of the gripper are connected two-by-two, to two circular plates, at 180° each other. The two disks can rotate relatively through a simple gear train mechanism actuated by a DC gear motor, in order to reconfigure the position of the fingers and consequently the orientation of grasping points (Figure 5A).
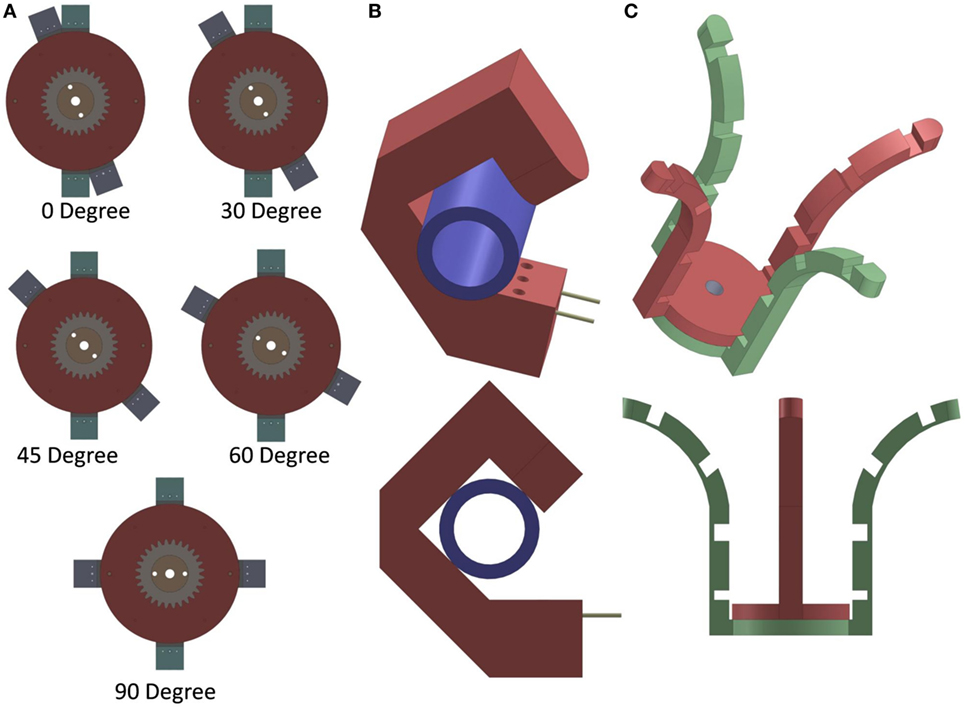
Figure 5. (A) Some reconfigurable positions of the fingers; (B) bending and grasping capability of the fingers; (C) “spider-like” configuration for enlarging the spectrum of objects size that can be grasped.
The grasping is actuated by a tendon-driven mechanism, similar to the arm module bending mechanism. Also in this case, two DC gear motors are used for pulling the fingers wires (one motor each pair of fingers). The fingers have been designed taking inspiration by human fingers (Figure 4D): each finger consists of three phalanges made of an artificial bone (a rigid structure) and connected by tendons, reinforced rubber and elastic waistband. Each finger has indeed three soft joints which can bend in one direction by pulling the tendon and come back passively thanks to the elastic property of rubber and waistband. The soft materials are coupled with a rigid structure to provide the stiffness needed for gripping. By releasing the tendons, it is also possible to configure a particular “spider-like” position (Figure 5C), where the fingers are overturned outwards, increasing the ability of gripping with relatively big objects (Figure 5B).
Prismatic Slider
The arm was connected to a prismatic base (Figure 2) for moving it in forward and backward directions. The sliding is based on the rack and pinion mechanism. The main goal is to use the sliding base to increase the manipulation capability of the arm by increasing the whole arm workspace in manipulation environment. The slider can in fact provide additional 400 mm displacement to the manipulator.
Fabrication and Control
Soft Compliant Manipulator for Broad Applications has been assembled with different components: hard and soft materials, tendons, and motors. For fabricating the arm modules, we used in total eight AISI 301 stainless metal springs (100 mm × 8 mm × 0.3 mm) for the central area of the disks, four AISI 301 stainless metal springs for the lateral area of the disks (150 mm × 8 mm × 0.3 mm), where the material properties of the springs are: tensile strength 1.65–1.86 GPa, Young’s modulus (E) 193 GPa, and Shear Modules (G) 68 GPa. We have used acrylic Plexiglass of different thickness (2, 3, and 5 mm) for making the module supporting structure. The material properties of the acrylic sheets are: tensile strength 80 MPa, Young’s modulus (E) 3.3 GPa, and Flexural rigidity 0.115 GPa. A fishing wire (0.33 mm thick and with 18 kg maximum load) was used to realize the tendons. The rotation of the modules is supplied by DC gear-motors and a gear train mechanism (two spur gears pinion and gear, with gear ratio of 1:2.8). The motors used for actuation are Polulu 986.41:1 micro metal gear motors which provide 9 kg cm torque, 32 RPM at 12 V. The all components have been fabricated by CO2 Laser cutting machine and assembled with the classical fastening techniques. For the gripper, we used the same fabrication technique and materials but introducing also reinforced rubber and elastic waistband for passive actuation. The detailed description of the design is explained in above section.
The components used for the fabrication of the slider are DC motor providing 12.24 kg cm torque and 50 RPM at 12 V, commercial aluminum profiles with slotted bars, rack gear 50:1 with 37 mm × 70 mm fixed on aluminum profile, pinion gear, and a moving plate made of Plexiglass. The full assembled design of manipulator is shown (Figure 6).
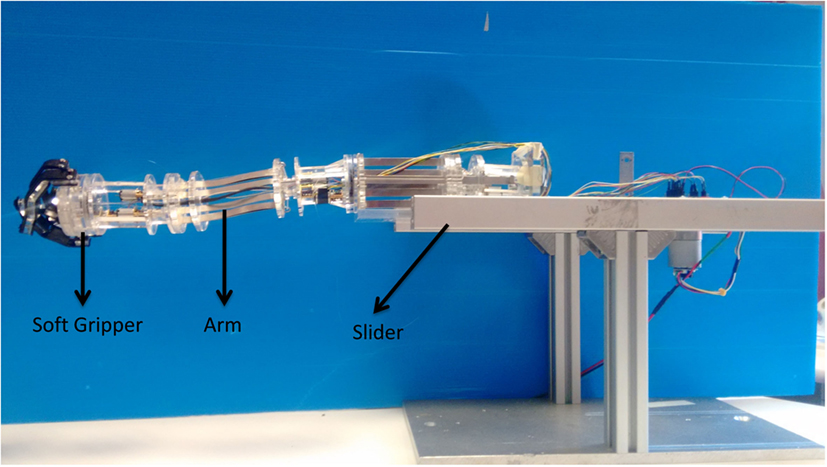
Figure 6. Soft Compliant Manipulator for Broad Applications final assembled prototype.
The hardware components of the manipulator have been controlled by a customized board (Figure 7) embedding a microcontroller (PIC32MX150F128B from Microchip Inc.), 8 motor drivers (LV8548MC from ON Semiconductor) for driving the 10 motors of the manipulator, and a Bluetooth4 module (RN42 from Microchip Inc.) for the remote communication with the control user interface. The user is able to act on the manipulator through an Android5 application (app) developed with Android Studio6 version 2.0 and compiled with target SDK version 23. With the app, it is possible to separately control the three components (the prismatic slider, the continuum arm, and the gripper) by using three different tabs on the main activity of the app. Through this user interface, it is possible to set separately the power of each motors, regulating in this way the tendons length and the relative rotation of each module; but it is also possible to use composite commands involving more than one motor at a time through predefined functionalities introduced to reduce the complexity on controlling the manipulator (e.g., opening and closing the fingers, bending left or right for each arm module or stop all motors in action).
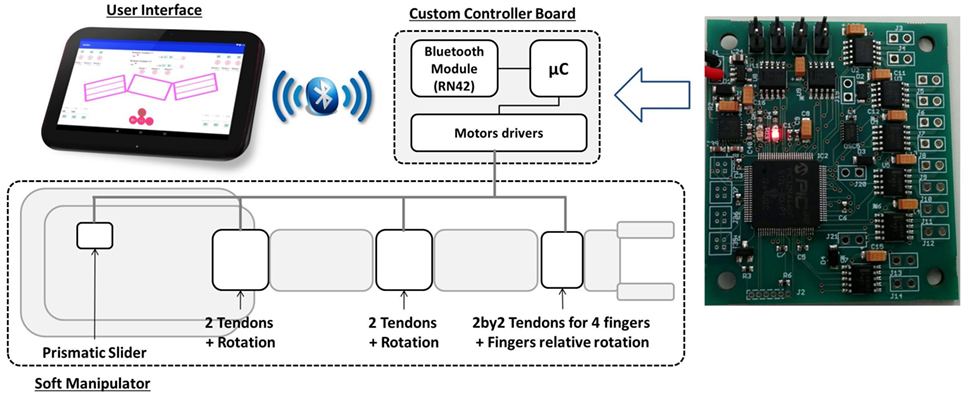
Figure 7. Soft Compliant Manipulator for Broad Applications architecture. The figure shows the connections among the components: Bluetooth connection between the mobile user interface (upper left corner) and the board (right side), and wired connection between the board and the actuation modules (white rectangles with black borders) of each main hardware components of the robot (prismatic slider, two arm modules, and gripper).
Experiments and Results
Our arm and gripper showed very nice performance in both laboratory test and at the RoboSoft Grand Challenge, where we succeeded in the door opening task as well as in the obstacle avoidance tasks. Also, the object grasping and manipulation capacity of our robotic hand are presented in the following from the test performed in laboratory, together with the force characterization of the gripper separate from the arm.
Gripper Force Characterization
The grasping force of the gripper has been measured in both vertical and lateral direction, to evaluate its load carrying capability, the soft rigid body interaction, the grasping and the effectiveness of the fingers reconfigurability. For the experimental trial, we used the universal testing machine (Zwick/Roell Z005) with Xforce P type load cell of 50 N, to which we have attached objects with different geometries (rectangular, spherical, and cylindrical) and size (diameter of 40, 30, 20, and 15 mm for the cylindrical shape).
To measure the force in vertical direction, the fingers where paired two-by-two and placed in the 0° position (Figure 5A) while grasping and pulling the object connected to the testing machine through a pulling wire, fixed perpendicularly to the gripper movement (Figure 8A); while for the lateral force measurement, we changed the gripper orientation and we measured the force in the same plane of gripper movement (Figure 8B). For results consistency, each experiment has been repeated at least three times.
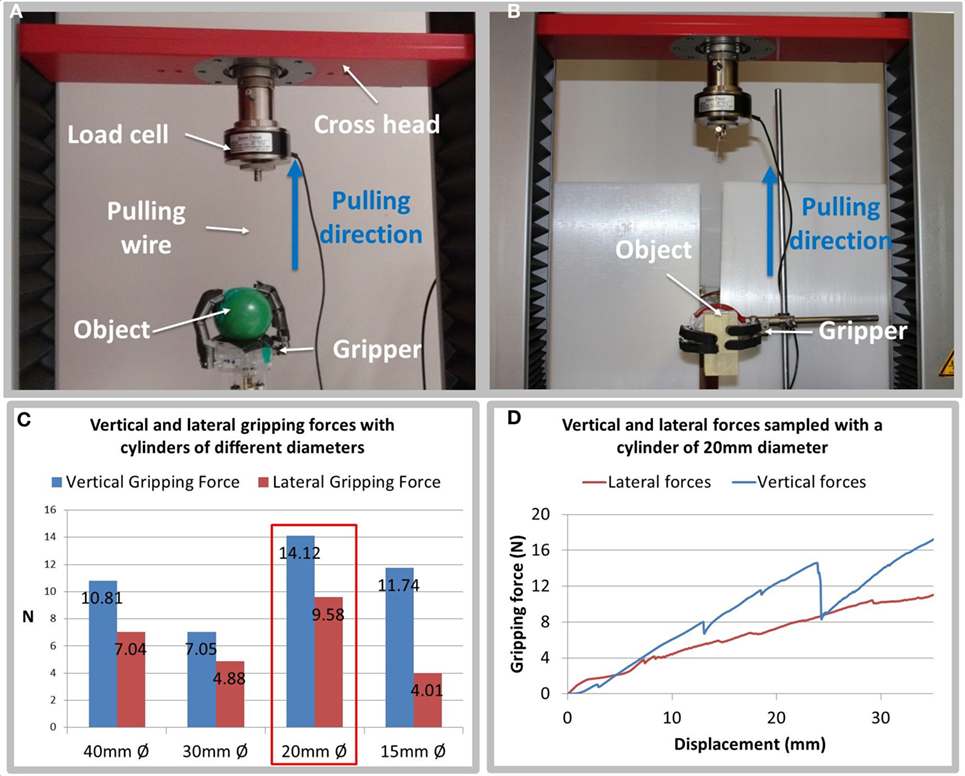
Figure 8. (A,B) show the experimental setup for vertical force characterization and lateral force characterization, respectively; (C) vertical and lateral gripping forces obtained on cylindrical objects with different diameters; (D) sampling of vertical and lateral gripping forces with the cylinder of 20 mm of diameter, over 35 mm of tendon pulling displacement.
We first tested cylindrical objects of different diameters obtaining on average a maximum force of 14.12 N in vertical pulling, and 9.58 N in lateral pulling, with a cylinder of 20 mm of diameter (Figure 8C). The graph in Figure 8D demonstrates that the gripper compliancy helped in the grasping task by adapting the gripping conformation to the object shape and consequently counteracting the force during the pulling of the wire. For prove further this compliancy, we also experimented the gripper with objects of different geometry, founding the averaged maximal forces (Table 1) with standard selected shapes: a rectangular prism (80 mm × 40 mm × 40 mm), a cylinder (40 mm Ø, 80 mm length), and a sphere (43 mm Ø).
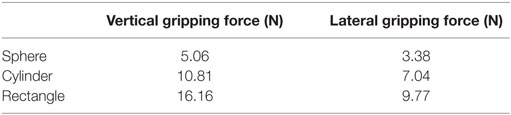
Table 1. Vertical and lateral forces measured while grasping objects with different geometry.
To test how the fingers reconfigurability can influence gripping performance, we simply compared the previous results obtained from one of the selected shapes (spherical object), with the forces measured by placing the fingers in a different configuration (90° each other). The experimental results (Table 2) show that, after the reconfiguration, the grasping force has been improved by 81.2% in vertical direction and by 67.4% in horizontal direction (lateral force).
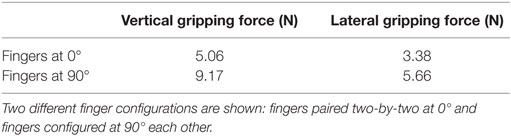
Table 2. Averaged maximal forces, on vertical and lateral grasping for a spherical object with a diameter of 43 mm.
Grasping Postures
Compliancy and reconfigurability, previously exploited with the forces, are fundamental properties for a manipulator working with unknown objects. Therefore, the softness of the gripper has been tested and evaluated also by considering size, surface, irregularity, and fragility of the objects. As it is possible to observe from (Figure 9), the gripper can easily grasp objects bigger than its finger length (100 mm), e.g., the spherical ball in Figure 9A which has a diameter of 120 mm, but also small objects, such as the cylinder of 15 mm diameter in Figure 9D. Also, the gripper is able to safely interact with fragile objects like bulb, egg, and chips. Soft joints and passive actuation, introduced in the design, play a key role for the success of these experiments.
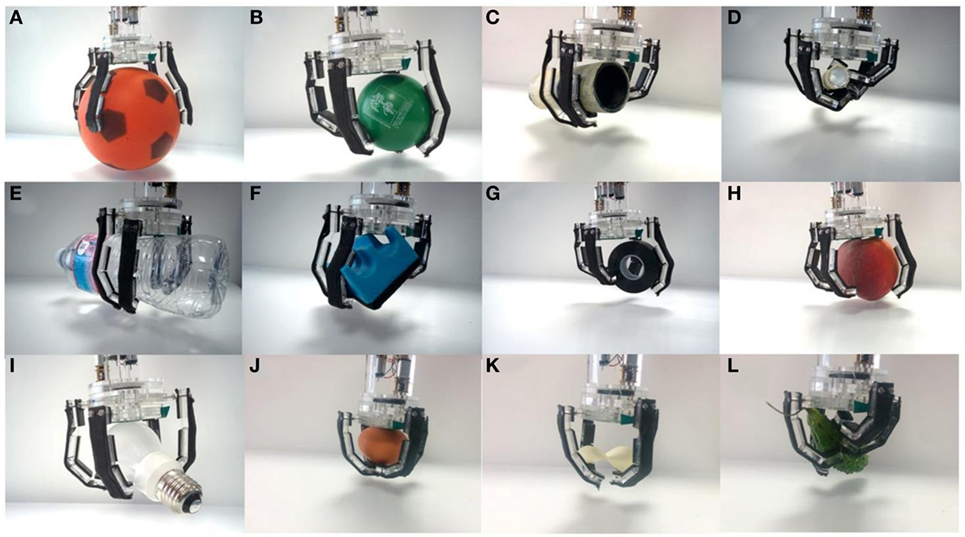
Figure 9. Grasping postures with object of different shapes, sizes, materials, and fragility: (A) sponge ball (120 mm Ø); (B) sponge ball (43 mm Ø); (C) cylinder (40 mm Ø); (D) cylinder (15 mm Ø); (E) bottle; (F) duster; (G) insulating tape; (H) fruit; (I) bulb; (J) egg; (K) potato chip slice; (L) vegetable.
Arm Positioning and Manipulation
Once tested and characterized the gripper, it was possible to completely test the whole robot considering also the continuum arm. In fact, after the assembling, it was possible to observe that, without the need of any actuation but only thanks to the flat springs, the continuum arm is able to lift its own weight (300 g), plus the gripper weight (120 g) and the object weight (Figure 10A). Also, springs, modularity, and soft actuation allowed the arm to easily bend for avoiding obstacles (Figure 10B), preserving good maneuverability for accomplishing tasks even little more complex, like pouring water into a glass (Figure 10C).
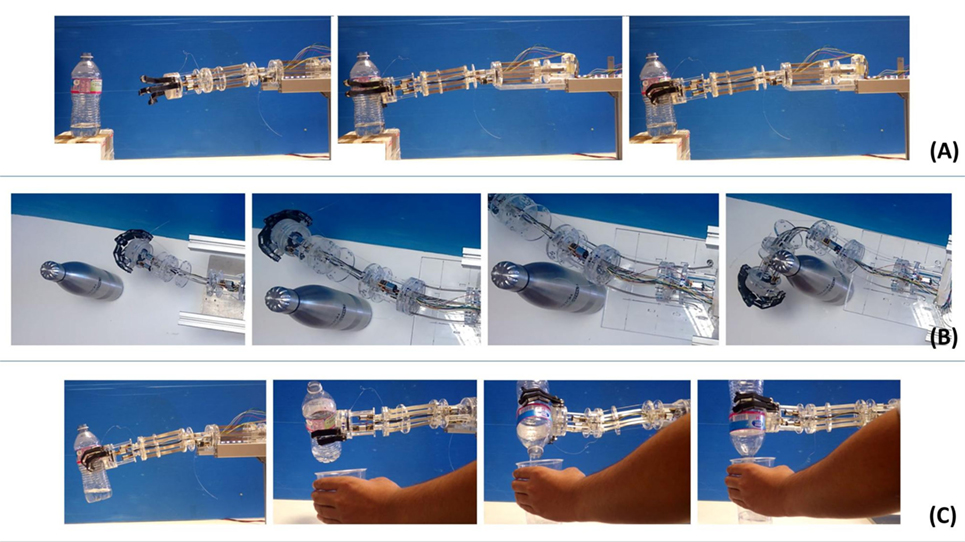
Figure 10. Soft Compliant Manipulator for Broad Applications manipulator in action: (A) a sequence of three frames from approaching and grasping a bottle of water; (B) a sequence of four frames from an obstacle avoidance task, with the arm performing a bending of 90° at the end of the task; (C) sequence of four frames from the manipulation of a bottle while pouring the water into a glass.
Discussions and Conclusion
In this paper, we presented the design and characterization of the SIMBA, which has been developed for competing in the Manipulation Scenario at the RoboSoft Grand Challenge 2016 promoted by the RoboSoft community. In our design, we proposed a hybrid approach to robot manufacturing by harvesting the capability of both soft and rigid robotics. The whole manipulator was able to perform specific and delicate tasks like pouring water, grasping eggs, or instant bending for obstacle avoidance, which are not easy tasks either with classical or soft robotic approaches. Soft materials, like reinforced rubber and elastic waistband, have been alternated to more rigid materials, like Plexiglass; and also the actuation system is a combination of tendons (soft approach) and motors (rigid approach), providing flexibility, compliancy, and at the same time precision and speed. In the arm, for instance, the stiffness needed for its own sustainment is inherently embedded in the flat springs employed as backbone in each module, which are also able to provide enough flexibility for bending; modularity as well is an important and beneficial feature of the design that increases maintainability and can allow a distribution of the control complexity over the modules. Modularity and flexibility together allow reaching great bending angles preserving maneuverability. Also our robotic hand is highly compliant and particularly suitable for working in unstructured environments with unknown objects, mainly due to two features introduced in the design: the reconfigurability of the fingers, for changing the grasping points, and the soft joints, providing high flexibility for a better adaptation to the object shape. This flexibility allows our gripper to set a particular “spider-like” configuration that can be beneficial in case of relatively big objects. Another interesting advantage of the gripper design is the underactuated mechanism. In fact it is possible to control 12 DOFs of the fingers with just two motors, while the elastic material introduced is used to passively bring back the fingers to its initial position after the release of an object. Both features help in reducing control complexity.
The RoboSoft Grand Challenge gave us the possibility to validate all these features into a complex, purposively developed, environment (some pictures from the challenge are collected in Figure 11). During the competition, the robot was able to easily bend, creating a serpentine shape, for avoiding obstacles. In pick and place task, we run out of time, but we have in this paper demonstrated the high adaptability of the gripper according to objects materials, fragility, size, and shape, providing also an esteem of the lifting capability: the gripper is able to grasp and lift objects from about 2 kg (grasping from the top) to 1 kg (if the object is grasped laterally). Finally, in the door opening task, we observed some difficulties induced by lower stiffness of hand, but we overcame the problem by increasing the arm and gripper stiffness. What emerged from the challenge is that there are circumstances where softness needs to be combined with rigidity in order to dynamically adapt the system for a correct and successful interaction with a real environment.
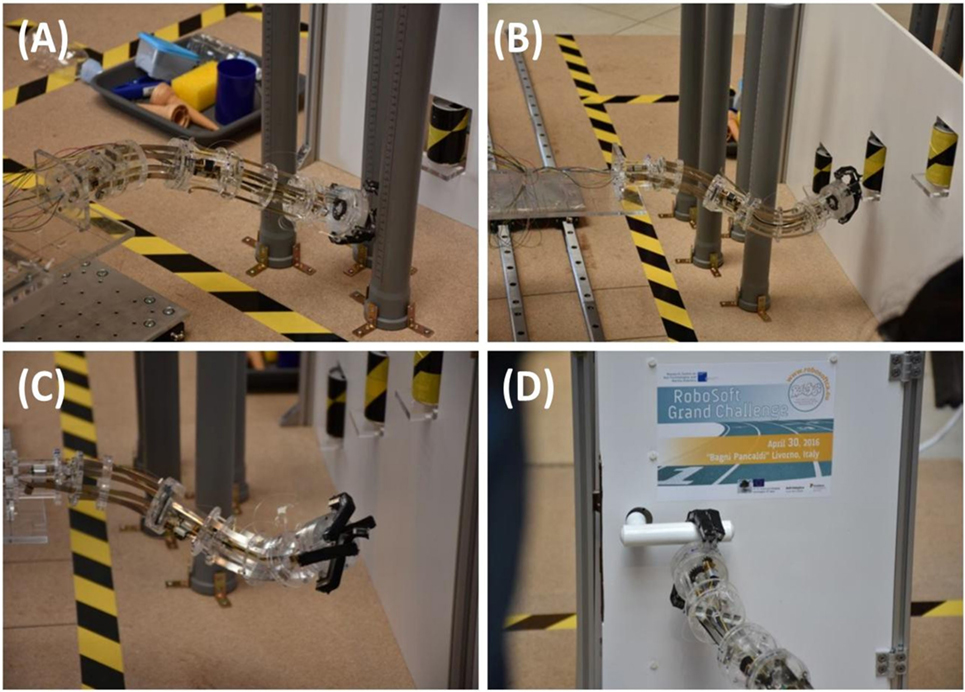
Figure 11. Pictures from the RoboSoft Grand Challenge during Soft Compliant Manipulator for Broad Applications performing some of the tasks: (A,B) two scenes of the obstacle avoidance; (C) closer view of the manipulator; (D) opening door.
Soft Compliant Manipulator for Broad Applications performed many tasks during the competition and in laboratory conditions, which gave a confidence on the reliability and robustness of the robot. Of course, there is always room for improvement. For instance, the robotic system could be ameliorated by enabling more human-like features or fingers with variable stiffness, to improve grasping; by choosing different tendons, to improve robustness and reliability; or by enhancing arm modularity to increase the spectrum of maneuvers.
The union of hard components with soft actuation systems and materials has been proved in our robot to be a good designing approach that can lead to the realization of safer and best performing robots, able to act in unstructured environments in synergy with humans. A robot with such capability can be used for instance in service robotics, gas pipe inspection, manipulation in nuclear environment, and sea exploration.
Author Contributions
AM—design, fabrication, assembly, experimentation, and writing. ED—App design for control, testing, writing, and correction. AS—design discussion and experimentation, writing, and correction. AM—design of controller and experimentation, writing, and correction. BM—advisor, writing, and correction.
Conflict of Interest Statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The handling Editor declared a shared affiliation, though no other collaboration, with the authors ED and AM and states that the process nevertheless met the standards of a fair and objective review.
Acknowledgments
We would like to thank the RoboSoft Grand Challenge 2016 community for organizing the event under RoboSoft Coordination Action on Soft Robotics project (FP7-ICT-2013-C project # 619319).
Supplementary Material
The Supplementary Material for this article can be found online at http://journal.frontiersin.org/article/10.3389/frobt.2017.00004/full#supplementary-material.
Video S1. Arm bending, positioning, and object grasping tasks accomplished by SIMBA continuum manipulator.
Footnotes
- ^http://www.kuka-robotics.com/united_kingdom/en/.
- ^http://www.rethinkrobotics.com/baxter/.
- ^http://www.comau.com/EN/our-competences/robotics.
- ^https://www.bluetooth.com/develop-with-bluetooth.
- ^https://www.android.com/intl/en_uk/ official website, and https://developer.android.com/index.html as reference for android developers.
- ^https://developer.android.com/studio/index.html?gclid=CMm8lImnh84CFQs6GwodfpwIDw refer to this link for last version of the software.
References
Cianchetti, M., Arienti, A., Follador, M., Mazzolai, B., Dario, P., and Laschi, C. (2011). Design concept and validation of a robotic arm inspired by the octopus. Mater. Sci. Eng. C 31, 1230–1239. doi:10.1016/j.msec.2010.12.004
Cieslak, R., and Morecki, A. (1999). Elephant trunk type elastic manipulator-a tool for bulk and liquid materials transportation. Robotica 17, 11–16. doi:10.1017/S0263574799001009
Deimel, R., and Brock, O. (2016). A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 35, 161–185. doi:10.1177/0278364915592961
Grissom, M. D., Chitrakaran, V., Dienno, D., Csencits, M., Pritts, M., Jones, B., et al. (2006). “Design and experimental testing of the OctArm soft robot manipulator,” in Defense and Security Symposium (Orlando, FL: International Society for Optics and Photonics), 62301F–62310F.
Hannan, M. W., and Walker, I. D. (2003). Kinematics and the implementation of an elephant’s trunk manipulator and other continuum style robots. J. Robot. Syst. 20, 45–63. doi:10.1002/rob.10070
Jones, B. A., and Walker, I. D. (2006). Kinematics for multisection continuum robots. IEEE Trans. Robot. 22, 43–55. doi:10.1109/TRO.2005.861458
Kim, S., Laschi, C., and Trimmer, B. (2013). Soft robotics: a bioinspired evolution in robotics. Trends Biotechnol. 31, 287–294. doi:10.1016/j.tibtech.2013.03.002
Laschi, C., Cianchetti, M., Mazzolai, B., Margheri, L., Follador, M., and Dario, P. (2012). Soft robot arm inspired by the octopus. Adv. Robot. 26, 709–727. doi:10.1163/156855312X626343
Laschi, C., Mazzolai, B., Mattoli, V., Cianchetti, M., and Dario, P. (2009). Design of a biomimetic robotic octopus arm. Bioinspir. Biomim. 4, 015006. doi:10.1088/1748-3182/4/1/015006
Majidi, C. (2014). Soft robotics: a perspective—current trends and prospects for the future. Soft Robot. 1, 5–11. doi:10.1089/soro.2013.0001
Manti, M., Hassan, T., Passetti, G., D’Elia, N., Laschi, C., and Cianchetti, M. (2015). A bioinspired soft robotic gripper for adaptable and effective grasping. Soft Robot. 2, 107–116. doi:10.1089/soro.2015.0009
McMahan, W., Jones, B. A., and Walker, I. D. (2005). “Design and implementation of a multi-section continuum robot: air-octor,” in 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (Edmonton, AB: IEEE), 2578–2585.
Neppalli, S., and Jones, B. A. (2007). “Design, construction, and analysis of a continuum robot,” in 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems (San Diego, CA: IEEE), 1503–1507.
Odhner, L. U., and Dollar, A. M. (2011). “Dexterous manipulation with underactuated elastic hands,” in Robotics and Automation (ICRA), 2011 IEEE International Conference (Shanghai: IEEE), 5254–5260.
Odhner, L. U., Ma, R. R., and Dollar, A. M. (2012). “Precision grasping and manipulation of small objects from flat surfaces using underactuated fingers,” in Robotics and Automation (ICRA), 2012 IEEE International Conference (St. Paul, MN: IEEE), 2830–2835.
Takeuchi, H., and Watanabe, T. (2010). “Development of a multi-fingered robot hand with softness-changeable skin mechanism,” in Robotics (ISR), 2010 41st International Symposium on and 2010 6th German Conference on Robotics (ROBOTIK) (Munich: VDE), 1–7.
Keywords: soft robot, continuum arm, modular arm, soft robotic hand, reconfigurable hand, tendon-driven actuation
Citation: Mishra AK, Del Dottore E, Sadeghi A, Mondini A and Mazzolai B (2017) SIMBA: Tendon-Driven Modular Continuum Arm with Soft Reconfigurable Gripper. Front. Robot. AI 4:4. doi: 10.3389/frobt.2017.00004
Received: 03 August 2016; Accepted: 31 January 2017;
Published: 15 February 2017
Edited by:
Marcello Calisti, Sant’Anna School of Advanced Studies, ItalyReviewed by:
Alvo Aabloo, University of Tartu, EstoniaAndrew Adamatzky, University of the West of England, Bristol, UK
Copyright: © 2017 Mishra, Del Dottore, Sadeghi, Mondini and Mazzolai. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) or licensor are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Anand Kumar Mishra, YW5hbmQubWlzaHJhQGlpdC5pdA==