 Tiina Kasuk
Tiina Kasuk Janika Leoste
Janika Leoste Sirje Virkus
Sirje Virkus- 1IT College, School of Information Technologies, Tallinn University of Technology, Tallinn, Estonia
- 2School of Educational Sciences, Tallinn University, Tallinn, Estonia
- 3School of Digital Technologies, Tallinn University, Tallinn, Estonia
Introduction: The aim of this article is to provide a report on the development of a pedagogical design model for the effective adoption of telepresence robots (TPRs) in synchronous hybrid learning settings.
Methods: Following the design thinking approach, we conducted three qualitative studies. In the first study, we examined the needs of and opportunities for using TPRs in education as well as some of the related challenges. This was based on the personal experiences of six academic staff members in two Estonian higher education institutions. Building on the first study, we designed a 13-week synchronous hybrid undergraduate-level course using TPRs. The course was delivered to six students. Based on the students’ homework and written feedback, the first prototype of a pedagogical design model was subsequently developed. In the third study, this model was piloted with 56 teachers by means of a two-hour hands-on synchronous hybrid workshop.
Results: Based on the teachers’ feedback, the prototype was further improved and the PEPCII Pedagogical Design Model was completed. The PEPCII model comprises six central components that address key barriers to the adoption of TPR-s in education: Physical Operational and Educational Environment, Ethical and Cybersecurity Considerations, Cognitive and Physical Limitations, Pedagogical Integration, Inclusive Access and Engagement, and Instructional Methods.
Discussion: The PEPCII model addresses critical barriers to TPR adoption in education. Future research is required to validate the model in varied classroom settings over longer durations, and to assess impacts on engagement and well-being of TPR users, on-site students, and instructors.
1 Introduction
Emerging technologies offer many new opportunities for education. At the same time, adopting them in education constitutes a complex social process that, in order to succeed, should keep pace with rapid and often unpredictable technological advances. While allowing for equipping students with advanced skills demanded on the labor market, designing technology-supported pedagogies and developing the necessary classroom practices require a thorough grasp of the educational processes. Ensuring the effective adoption of new technologies also requires careful consideration of the stages of learning and environmental factors (Leoste et al., 2021). Haphazard adoption of new technologies may easily have an effect quite different from the one expected.
Emerging technologies have been found having a positive effect on the effectiveness of hybrid learning, particularly with regard to improving the quality of synchronous hybrid learning. Synchronous hybrid learning means teaching face-to-face and remote students simultaneously in real time (Raes et al., 2020). According to Fabian et al. (2024), the main challenges of synchronous hybrid learning include students feeling excluded and disconnected from their peers and experiencing difficulties in collaborating with other students. The perceived lack of social engagement may lead to the loss of attention to learning, having a negative impact on learning outcomes. The central question remains how to ensure the well-being and effective participation of everybody present in the synchronous hybrid learning environment.
Telepresence robots (TPRs) constitute a novel remote learning technology potentially suitable for use in synchronous hybrid learning environments. The concept of telepresence was first introduced by Minsky (1980). A TPR can be described as a teleconferencing system on wheels, providing remotely located participants with a physical presence in the classroom (Tsui et al., 2011). Compared to traditional videoconferencing, TPRs offer higher levels of social presence, allowing remote participants to move around, freely choosing their position in the room, and dynamically changing their interaction partners (Cha et al., 2017). Social presence is defined as “the degree to which a person is perceived as a ‘real person’ in mediated communication” (Short et al., 1976). Such features make TPRs a promising tool for giving students access to education in times of emergencies or when access is hindered by health-related or other issues (Weibel et al., 2020; Page et al., 2021). Despite these benefits, the adoption of TPRs in education faces several challenges. While some studies, such as Elmimouni et al. (2024), offer recommendations for enhancing the TPR-mediated learning experience, most of the available research focuses primarily on the problems associated with their technical use. For instance, Perifanou et al. (2022), Velinov et al. (2021), and Häfner et al. (2023) have discussed various technical limitations of and challenges related to using TPRs in educational settings.
Kasuk and Virkus (2024) have suggested that to avoid focusing merely on technical issues and to allow for shifting the attention to creating learning designs for classroom practices, TPR implementation studies should rely on technology integration frameworks and pedagogical design models. Various such frameworks and models have been developed for the purposes of assessing the perceived usefulness of technology in education and the ease of its integration. Applicable for real life situations, these models can guide the adoption of new technologies in education as well as in other organizational settings. Among the literature reviewed by Kasuk and Virkus (2024), covering the period from 2011 to 2022, only a few studies (Fischer et al., 2019; Han and Conti, 2020) had used technology acceptance models. These models included the Technology Acceptance Model (TAM) by Davis (1989) and the Unified Theory of Acceptance and Use of Technology (UTAUT) by Venkatesh et al. (2003). Besides the studies focusing on TAMs available in the Scopus database, the articles published between 2022 and 2024 on the use of TPRs in education included the following: (a) Mascret et al. (2023) used pre- and post-tests as research instruments to assess how older adults adopt guidance via TPR, relying on TAM constructs such as perceived usefulness, perceived ease of use, perceived enjoyment, and the intention to use; (b) Huun and Slaven (2024) assessed the perceived usefulness and ease of use of technology by students in simulations, building their study on the respective TAM constructs; finally, (c) Arthanat et al. (2023) developed a set of UTAUT-based guiding questions to explore the possibilities of using TPRs in training older adults in the context of creating telehealth opportunities.
In addition to using UTAUT and TAM, several available studies have been guided by the principles of the Technological Pedagogical Content Knowledge (TPACK) model. TPACK (Mishra and Koehler, 2006) is a framework that helps teachers integrate technology into their pedagogies by combining content knowledge (understanding the subject matter), pedagogical knowledge (knowing how to teach effectively), and technological knowledge (understanding how to use technology in the classroom). The TPACK framework is particularly significant as the developers tend to design technological solutions according to their personal preferences, while overlooking the pedagogical aspects (McGraw Hill Canada, 2019). The TPACK framework explains how technology can support teaching, allowing for presenting content in new ways. Using the TPACK model can improve educational outcomes, as it ensures that technology is integrated purposefully and in alignment with pedagogical best practices, and appropriate for subject-specific content. Teachers with strong experience in using TPACK are likely to create more engaging, personalized, and future-ready learning environments that meet diverse student needs and prepare them for a technology-driven world (Inan and Lowther, 2010).
In addition to the previously mentioned models, other available models are specifically designed for adopting TPRs in education. TRinE (Telepresence Robots in Education) 4D is a four-category model by Perifanou (2023), describing a pedagogical approach for adopting TPRs in the classroom while using action research methodology as its basis. TRinE 4D includes the following pedagogical factors in adopting TPRs: (a) the educational context, (b) the educational TR settings, and (c) the teaching methods and tools. The model consists of the following stages: define (analyze information regarding the subject and students), describe (describe the number of participants involved via TPR, the role of TPR-mediated participants, and the types of TPR), decide (select teaching methods and tools), and design (plan the process). The model has been designed to support teachers, instructional designers, and other users in adopting TPRs in education (Perifanou, 2023). Chan et al. (2022) have developed a 4C model to adapt TPRs into HyFlex classrooms. The 4C model includes the following components: content (teaching materials), collaboration (active learning through collaboration), community (presence and sense of belonging), and communication (interaction with the teacher and other students).
Both the 4C and the TRinE 4D models start from the micro level while adopting TPRs. Perifanou (2023) and Chan et al. (2022) emphasize while developing their models that the adaptation of TPRs must consider the subject matter and its specifics, the students and their needs, as well as cover the selection of teaching methods that enable the collaboration and TPR-mediated participation, focusing on content. In the case of both models it remains, however, unclear which technology acceptance or adoption model, framework, or theory they rely on. Neither of the models addresses ethics and cybersecurity concerns or considers environmental setup issues in their use of TPRs. While there is limited research available that addresses either technology acceptance or pedagogical approaches in the context of TPRs, there is also a notable absence of comprehensive pedagogical design models that would encompass both approaches specifically for the purposes of TPRs.
To fill this gap, the research project described in the current article has aimed to develop such a model for the purposes of a more effective integration of TPRs into synchronous hybrid learning environments. The article is organized in the following manner: the second section outlines the research methodology and describes the empirical studies, the third section presents the overall results, the fourth section offers the PEPCII model, the fifth discusses the findings, and the sixth and final section concludes the study.
2 Empirical studies
The research project presented here was conducted from October 2023 to July 2024 and included three empirical studies (see Figure 1) to explore systematically the adoption of TPRs in higher education.
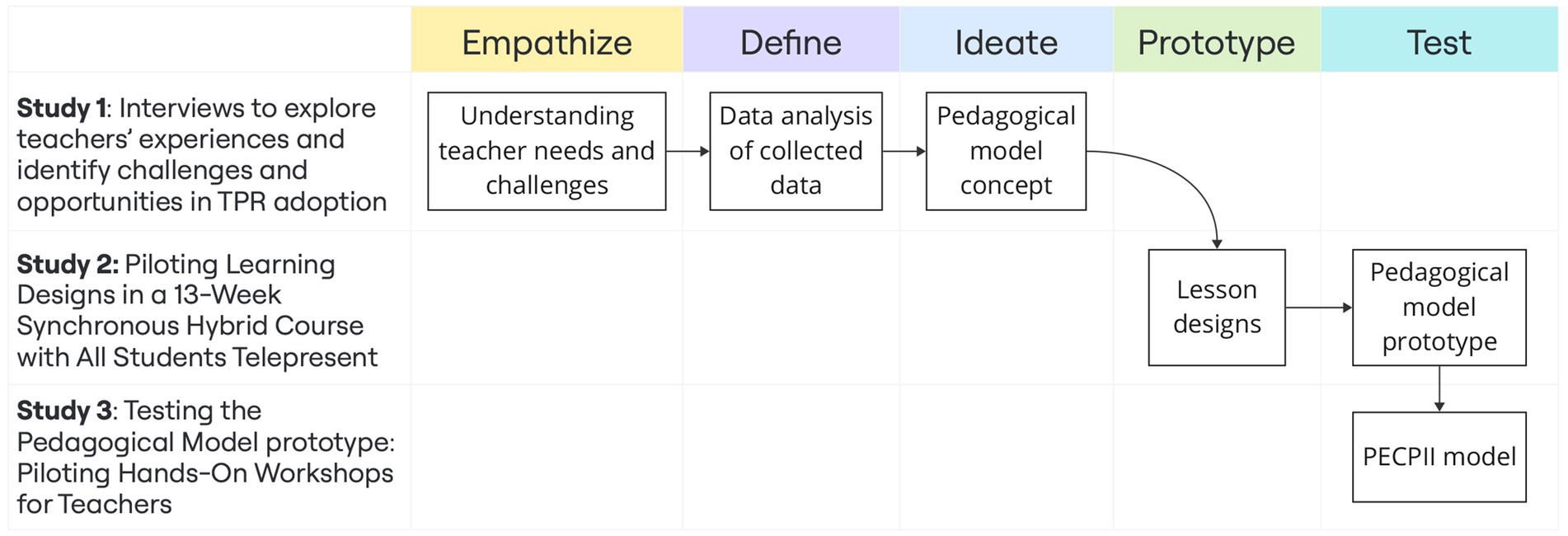
Figure 1. The Study design describes activities in all three studies that align with the Design Thinking process: empathize, define, ideate, prototype and test.
The first study included interviews with six higher education teaching staff members from Estonia to explore teachers’ experiences and identify challenges and opportunities in the adoption of TPRs. Based on the results of this study, we have developed learning designs supporting the use of TPRs in student learning. As the next step, the second study piloted the learning designs in a 13-week synchronous hybrid course, with all students attending in telepresence mode. In the third and final study, which relied on the results from the previous studies, we tested the pedagogical design model prototype by piloting it during hands-on workshops for teachers. Double 3 (Double Robotics), Ohmni (Ohmni Labs) TPRs, and the TEMI v3 (Robo TEMI) robot assistant with the TPR functionality were used in all three studies. In some cases, the participants already had previous experience using these particular types of robots.
The Design Thinking Process (Brown, 2008) served as the guiding framework structuring the research. While the first study provided input for understanding teachers’ needs, challenges, and opportunities in using TPRs in the learning process, the second study offered an opportunity to test the initial concept of the pedagogical design model. Testing the learning designs created from the initial pedagogical design model in the second study further included students’ expectations, challenges, and opportunities regarding TPR use in learning. In the second study, we piloted the learning designs and developed the first pedagogical design model as a result of testing. During the third study, feedback was gathered for the purposes of the prototype development, ultimately leading to creating the PEPCII model. Each study was guided by a relevant research question. Based on the answers to these questions, we propose our comprehensive pedagogical design model for integrating TPRs in synchronous hybrid learning environments.
The validity of the research results is ensured by means of using a design thinking-based iterative process and three empirical studies (see Figure 2). We had three connected studies that helped develop the pedagogical design model. The data collected from the interviews with the teachers, the students’ reflections and the focus group interviews combined with the workshops have allowed us to use data triangulation to strengthen the internal validity of the results. To ensure constructional value, we applied thematic coding in data analysis. While prototyping the pedagogical design model, testing and revising it strengthened the reliability of the research.
To guide our study, we formed the research questions, leaning on the iterative design thinking-based research process, grounding each next question in the empirical evidence from the previous stage. The first research question (RQ1) was a result of the need to find out practical barriers that were identified during preliminary teacher interviews, and of the gaps in existing literature about technology integration in hybrid settings – viewed from the perspective of technical and pedagogical challenges that teachers encounter with TPRs. Our goal was to ensure that the next research stages were based on real-life experience and practical realities. The second research question (RQ2) was based on the knowledge from Study 1 and had a theoretical emphasis on two core challenges that are frequently brought out in synchronous hybrid learning research: social presence and student engagement. We focused on the factors that influence students’ perceived presence and engagement with TPRs. Thus, RQ2 addressed the need to understand student experiences deeply, and aimed to ensure that besides technical and teaching-related aspects, the pedagogical model considered also student-centric elements necessary for effective learning. The third research question (RQ3) used the findings from Studies 1 and 2 to provide broader validation and refinement for the emerging pedagogical model. The focus was on identifying specific educational scenarios suitable for productive TPR use and factors enhancing or limiting their effectiveness. By explicitly targeting conditions and factors critical for successful TPR integration, this research question intended to bridge theory and practice, ultimately contributing actionable and empirically validated recommendations for educators and institutions.
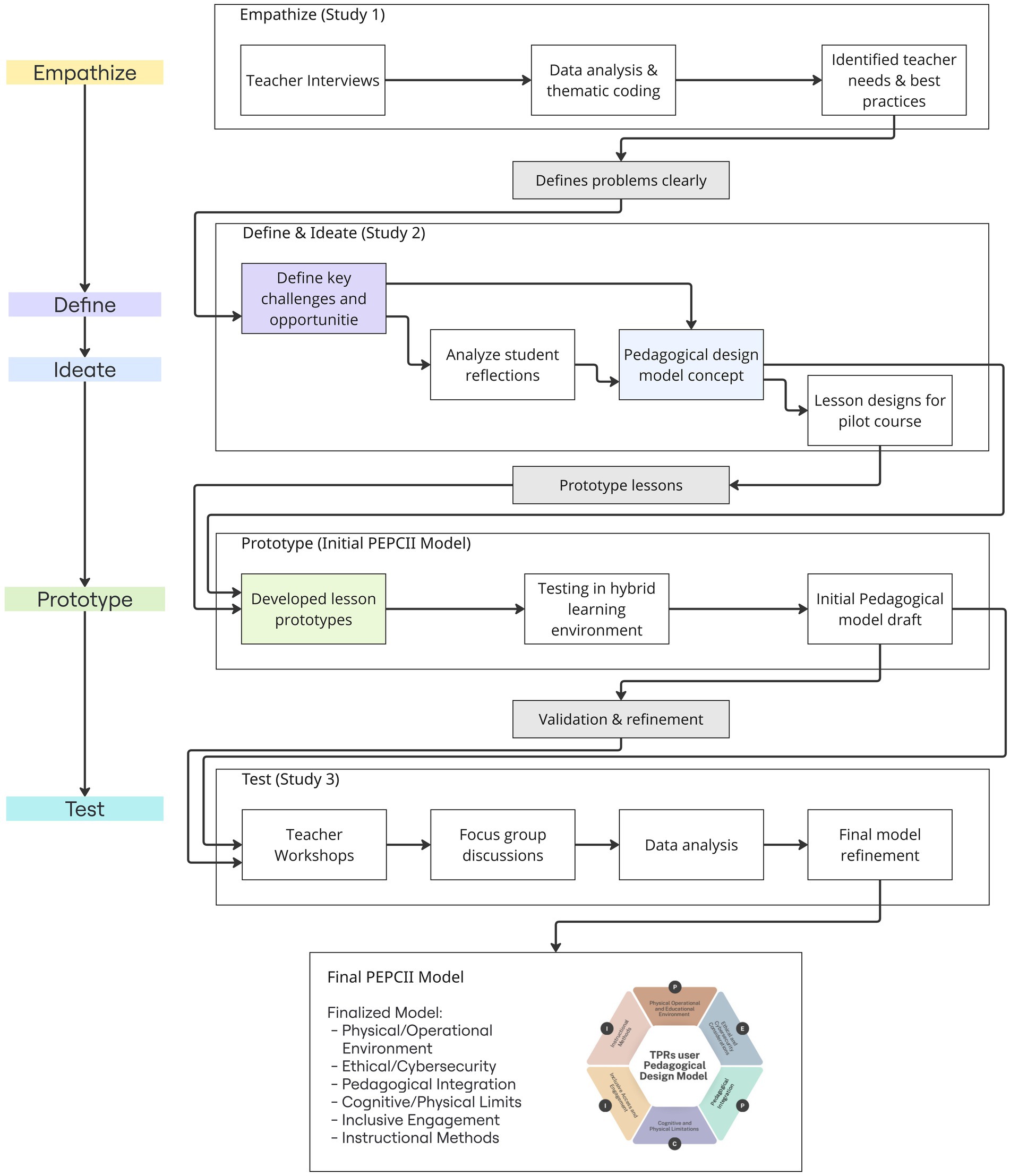
Figure 2. Flowchart of the PEPCII Pedagogical Design Model development.
2.1 Study 1: interviews to explore teachers’ experiences and identify challenges and opportunities in TPR adoption
The research question for Study 1 is the following:
RQ1: What technical and pedagogical challenges do teachers encounter while using TPRs in teaching, and what impact do these challenges have on the quality of teaching and student engagement?
2.1.1 Methods and materials
The study included teachers from Estonian higher education institutions with prior experience in conducting or having attended TPR-mediated lessons. At the time of the study, teachers with sufficient experience of using TPRs were found in only two higher education institutions. All teachers meeting these criteria were invited to participate in a semi-structured interview. A total of six teachers, aged 30 to 67, participated in the interview. Four interviews were conducted in Estonian and two in English. The group included two female and four male participants. Given that TPR constitutes an emerging technology that remains underutilized in education, a purposive sample of experts was selected, with their shared opinions grounded in their practical experience with the adoption of the new technology.
The interviews conducted via Zoom and Microsoft Teams between October and November 2023 were recorded with the participants’ consent. The transcriptions were prepared using Tekstiks.ee (Olev and Alumäe, 2022) and Notta.ai, followed by manual error correction. Thematic content analysis (Smith, 1992) revealed the key categories related to the teachers’ technical solutions, classroom limitations, the importance of external support (e.g., assistants), and practical recommendations for novice TPR users. Figure 3 illustrates the concept map of the interviews’ thematic content analysis.
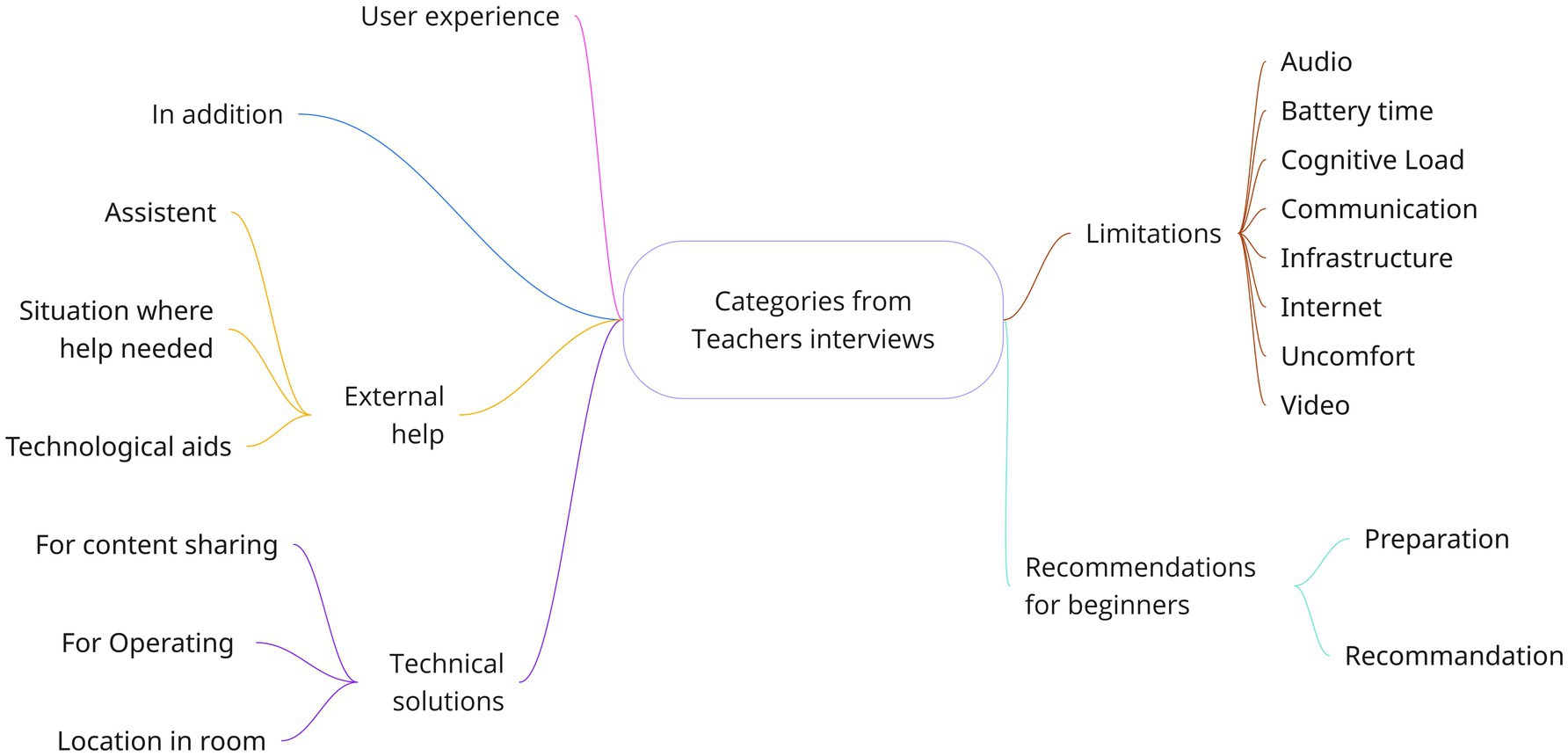
Figure 3. Conceptual map of Study 1 Thematical Categories. This mind map organizes key themes extracted from interviews with teachers, highlighting areas such as user experience, technical solutions, external help, limitations (e.g., audio, cognitive load, infrastructure), and recommendations for beginners.
2.1.2 Results: the challenges and opportunities in TPR adoption
The interviews allowed for identifying three main cases of TPR use in education: (1) conducting lessons mediated by a TPR by remote teachers, including the active presentation of learning content, such as slides, drawings, and diagrams; (2) enabling students to participate remotely in classroom activities and discussions when they are unable to attend in person; (3) facilitating teachers’ remote participation in events, training, seminars, or meetings through TPRs.
The teachers who participated in our research emphasized several technical prerequisites for the effective use of TPRs. Most often they highlighted the issues such as clear audibility and visibility as critical factors influencing the quality of communication, particularly in the context of teaching in large classrooms. They also suggested using multiple screens or a single large screen, preferably with 4K resolution, to allow for the simultaneous use of the TPR interface and other necessary tools for presenting the learning content. It was suggested that adding an extra communication channel, such as a video conferencing solution, would improve the visibility of teaching content to the entire class. The teachers stressed that to improve the quality of sound, the voice of a remotely present teacher should be transmitted through a separate audio channel.
One teacher described the importance of the TPR’s location in the classroom in the following manner: “I solved the problem by positioning myself right next to the large interactive whiteboard with the robot and drawing on it as if I were physically present. I used Zoom’s Whiteboard to draw with the mouse.” (I1) To ensure clear communication as one of the pre-requisites for the inclusion of all students, particularly in noisy or acoustically poor classrooms, the teachers considered it critical to choose a quiet environment for the TPR use, as well as using high-quality headphone and microphone sets. While some teachers felt that built-in laptop speakers and microphones were sufficient for audio transmission at the basic level, they noted that in more demanding environments better quality equipment might be needed.
The interviews revealed several limitations to teaching caused by the use of TPRs. Noting that facial expressions play an important role in supporting non-verbal communication, the teachers identified their limited ability to use body language as one of the significant challenges. The low quality of the voice transmission was often mentioned as an issue to be considered while choosing a suitable audio equipment. One participant commented on the quality of signal transmission within the TPR’s communication system: “Sometimes I was not getting good quality sound and picture. Because of this, I had to change my position in the classroom quickly to get a better view and a better audio and video quality.” (I6) Additionally, the teachers stressed that relying on the internet and the poor quality of connection often led to delays, making the use of the TPR difficult. The lack of a text-based communication channel was also mentioned as a distinct challenge, making it difficult to share teaching resources in real time and as a result of this – hindering teaching. Another limitation mentioned was the speed of the TPRs’ movement, as the robots’ inadequate speed may easily complicate conducting discussions and cause delays in teachers’ responses, particularly in more dynamic classroom situations.
One of the often-mentioned issues in the interviews was the availability of designated support staff or teaching assistants who would support the smooth delivery of TPR-mediated teaching. The presence of the support staff would allow the teacher to focus solely on delivering a lesson while the assistant would deal with all technical issues. During the lesson, the assistant might also provide feedback to the teacher regarding any particular technical issues and concerns, such as the quality and volume of the audio signal. Together with teaching assistants, teachers can remotely plan the integration of TPRs in their teaching, adapting the learning environment to accommodate TPRs’ movement, and test the equipment for planned TPR supported activities. More experienced assistants could also provide additional on-site support, for example presenting teaching materials.
Our interviewees offered recommendations to new TPR users. The participants stressed the significance of thorough preparation. It was suggested that teachers should consider how to use TPRs in engaging students in discussions. One interviewee argued for a thorough preparation in the following manner: “You must prepare thoroughly to avoid your teaching being disrupted. Using a robot should not disturb other students.” (I2) Before conducting a lesson using a TPR, the equipment should be checked regarding the internet coverage in the classroom, the robot’s battery life, and the quality of audio and video transmission. Another interviewee described the required pre-lesson activities: “One limitation is the battery life of the robot. I always check it in the storage room one or two hours before the class.” (I5) Attention should also be given to the teacher’s appearance on the TPR screen. One important recommendation to teachers was to attend introductory lessons provided by experienced TPR users. This would allow teachers to better prepare for their classes, choosing effective communication strategies as well as strategies to compensate for their inability to use body language while communicating with students.
The interviewees suggested conducting pilot trials before offering full-scale TPR-mediated lessons to further refine teachers’ TPR using skills. This would allow new TPR users to develop their skills in facilitating group discussions and other classrooms activities while receiving immediate feedback from experienced TPR users. They should also learn how to identify video blind spots and audio signal distortions. New robot users should also be made aware of the ethical and cybersecurity concerns entailed in TPR-facilitated teaching. One interviewee pointed out the merits of small-scale piloting: “You need to see the robot in action – how it moves in the classroom, what it does, and how it sounds.” (I3).
Some of the participants also stressed the importance of ongoing professional development to help TPR users build their confidence. Creating peer groups where new techniques might be shared, challenges discussed, and new methods and equipment presented was one of the ways to support teachers using TPRs in professional development. Continuing professional development allows for appreciating technology supported education as a living and evolving practice, as opposed to mechanical incorporation of various gadgets in classroom activities.
The insights gained from Study 1 formed the foundation for the design of the subsequent study phases, highlighting some of the key considerations in the TPR adoption and use.
2.2 Study 2: piloting learning designs in a 13-week synchronous hybrid course with all students telepresent
The research question for Study 2 is the following:
RQ2: What factors influence students’ sense of social presence and engagement during TPR-mediated participation in classroom activities?
2.2.1 Methods and materials
In the spring semester of 2023/2024, a 13-week hybrid learning course was launched to develop and refine the prototype of a pedagogical design model for the effective use of TPRs in higher education. The participants of this course were also invited to participate in the second 292 stage of this study. In total there were 6 participants (undergraduate students, under 30 years old, 293 3 female and 3 male students). The decision to take part in the study was a voluntary one and it 294 was explained to the students that as such, it did not influence their grades in any way. Building on the findings from Study 1, the course Enhancing Social Interaction in Education and Business uses TPRs and allows for testing the practical application of robots in real-world learning environments. The course covered six critical aspects of TPRs’ use, laying the foundations for a robust pedagogical design model to guide their integration in teaching. Each week’s tasks aligned with one of the six aspects of TPR use: operating environments, educational settings, cognitive and physical limitations, inclusivity and ethics, and instructional methods.
In the first week, the students learned to operate the TPRs, navigating classrooms and open spaces while practicing communicating with both the participants present in the classroom as well as the TPR-mediated students. In subsequent weeks, the students were instructed to adapt the TPRs according to classroom-specific needs, such as conducting vision tests, evaluating content visibility, and presenting lessons. The cognitive and physical limitations of TPRs were also explored through tasks such as using virtual and physical whiteboards, navigating unfamiliar environments, and adapting teaching methods for remote teaching. One week focused entirely on the ethical and cybersecurity dimensions of the use of TPRs. The final week brought the entire content together, with students participating in mini-lectures, collaborative group work, and digital worksheet activities to simulate real classroom dynamics. The students were assigned learning-design-based homework after each lesson, giving them an opportunity to reflect on the lessons and explore the possibilities of using TPRs in similar situations. For example, based on their expressions in the practical session, the students had to analyze the environment (including the technical solution) they had, describe in which learning area they perceived the strongest cognitive overload, reflect on the physical limitations they experienced during the hands-on session, and how they could overcome these limitations. These home assignments (3 from each student) were submitted to thematic content analysis. Microsoft Excel was used for data analysis. Figure 4 illustrates the concept map of the thematic content analysis of the students’ homework.
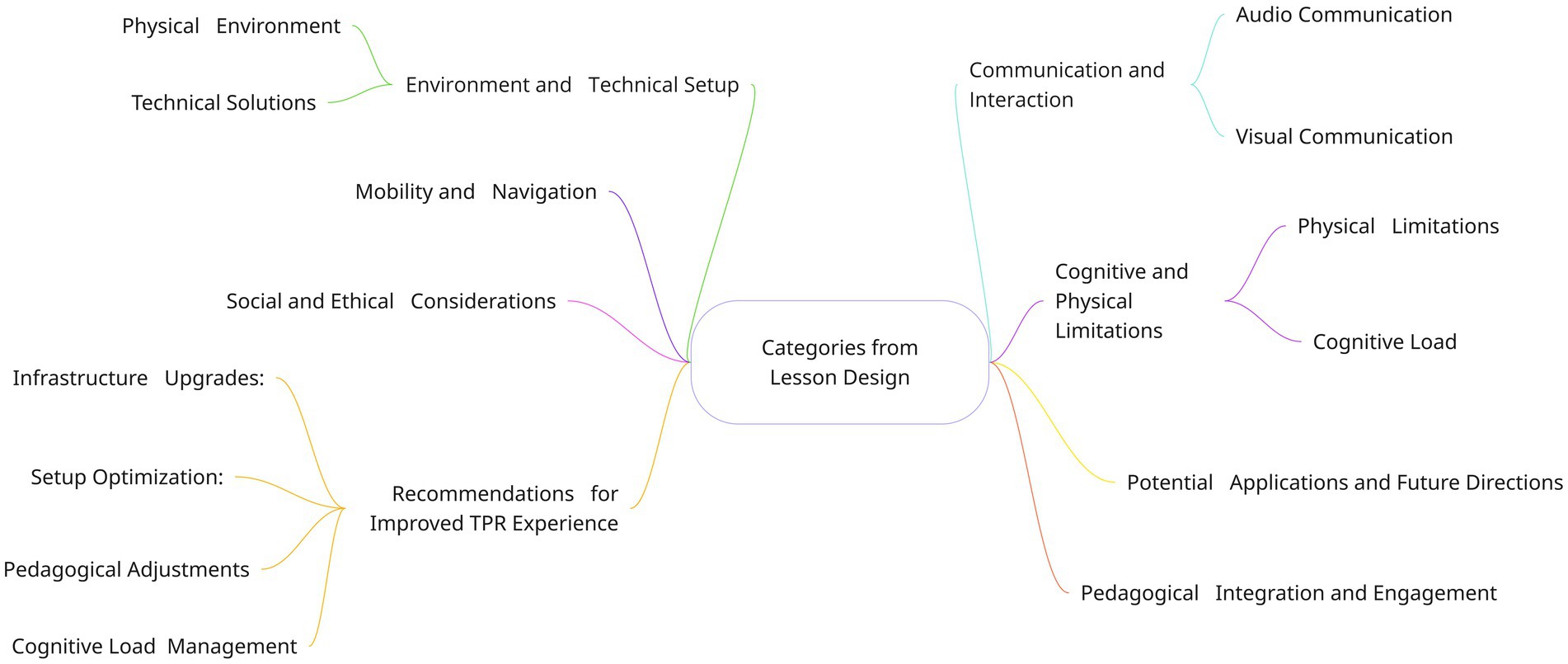
Figure 4. Conceptual map of Study 2 Thematical Categories. This conceptual map outlines the critical considerations for lesson design, including environmental and technical setup, mobility and navigation, communication and interaction, cognitive and physical limitations, as well as recommendations for enhancing the TPR experience.
2.2.2 Results: factors influencing students’ sense of social presence and engagement during TPR-mediated participation
2.2.2.1 Enhancing the presence
The students reported that they felt a stronger sense of presence and engagement when using TPRs as opposed to standard video conferencing. The sense of presence was strengthened by the TPR’s ability to move independently and the opportunity to interact with classmates. One student reflected their own experience: “Encouraging social interaction in a positive environment and respecting ethical boundaries of the interaction, like privacy and etiquette, are all crucial factors in encouraging a communicative situation. In a productive communicative situation, the benefits of TPRs for (non-verbal) communication can be utilized, making them more useful for learning than a traditional video conference.” (Student A) A sense of deeper engagement was supported by using digital collaboration tools during group assignments, where TPR-mediated students could actively contribute to teamwork. Another student observed: “Social interactions are a fundamental part of learning, offering opportunities for collaboration and discussion.” (Student B).
2.2.2.2 Lowering cognitive load
Student reflections revealed that working with multiple open windows during a class increases cognitive load, especially when using a single monitor with limited screen space, as it risks breaking the visual connection with the classroom. One participant reported: “I perceived the strongest cognitive overload in the first experiment, where I had to split my attention between Zoom with PowerPoint and the TPR user interface” (Student A). Expanding the computer desktop with an additional monitor made it possible to maintain a virtual connection to the classroom while keeping other necessary applications visible. Combining digital learning materials such as worksheets with TPR-mediated substitutes to paper learning materials helped students reduce their cognitive load and supported gaining deeper understanding of the material. The students also mentioned installing an additional 360-degree camera to provide a better overview of the classroom, improving the perception of the classroom environment. One student suggested further opportunities to lower cognitive load in the following manner: “I would also recommend using an Owl 360* view camera to keep the overview of noise and movement in the classroom.” (Student A) Creating predefined classroom maps, including marking important locations, helps reduce the strain associated with TPR navigation. A student noticed: “Moving with a map provided a gratifying and smooth driving experience with much less cognitive load.” (Student A) When multiple users simultaneously use the same TPR, it is crucial to agree on the distribution of roles.
2.2.2.3 Ethics and cybersecurity
The students identified particular ethical and cybersecurity concerns. Issues may arise because the TPR camera is more mobile and, in some models, even better than the human eye. There is also a risk that through the TPR a student may gain unauthorized access to confidential information. Another potential threat is access via active TPR links that were not properly deactivated. The students emphasized the importance of maintaining a respectful attitude toward TPR users. One student noted, for example: “To be ethical, I now need your consent to lift your TPR body across the threshold.” (Student A). To ensure privacy, the emergence of potential security incidents must be minimized. As another student pointed out: “If the people using the lab are not careful, a TPR may access some ‘secret’ or personal information.” (Student B) The results of Study 2 were used as the principal data for developing the initial version of the PEPCII model (see also Section 4) that was validated in Study 3, and then finalized, based on the results from Study 3.
2.3 Study 3: testing the pedagogical design model prototype: piloting hands-on workshops for teachers
The research question for Study 3 is the following:
RQ3: Which educational scenarios allow for the productive use of TPRs, and which factors, respectively, contribute to or hinder the effectiveness their use?
2.3.1 Methods and materials
In Study 3, we shifted the focus to preparing teachers for the practical adoption of TPRs in their teaching. The goal was to acquire a broader understanding of the effectiveness and acceptability of TPRs while developing the first version of the PEPCII Pedagogical Design Model for TPR Users. From May to July 2024, we organized a series of 13 workshops, each lasting for 90 min. The workshops were attended by 56 teachers from Estonia and abroad. In the workshops, we offered hands-on experience in using TPRs and also used the robots to gather the participants’ perceptions of their use in the actual classroom setting.
Through the workshops we intended to equip the participants with specific basic skills of operating TPRs in an educational context. Conducted in the format of synchronous hybrid sessions, the workshops included both remote presence and in-person elements. The participants joined the workshops using Zoom, while the instructor and their assistants worked from a specially prepared classroom (see Figure 5). The equipment included a 360-degree camera to provide an immersive view of the teaching space and an additional web camera to ensure that the participants could see and follow the instructor clearly. The classroom layout was simplified by removing unnecessary furniture, enabling the TPR’s unrestricted movement. A screen and a whiteboard were set at the front of the classroom.
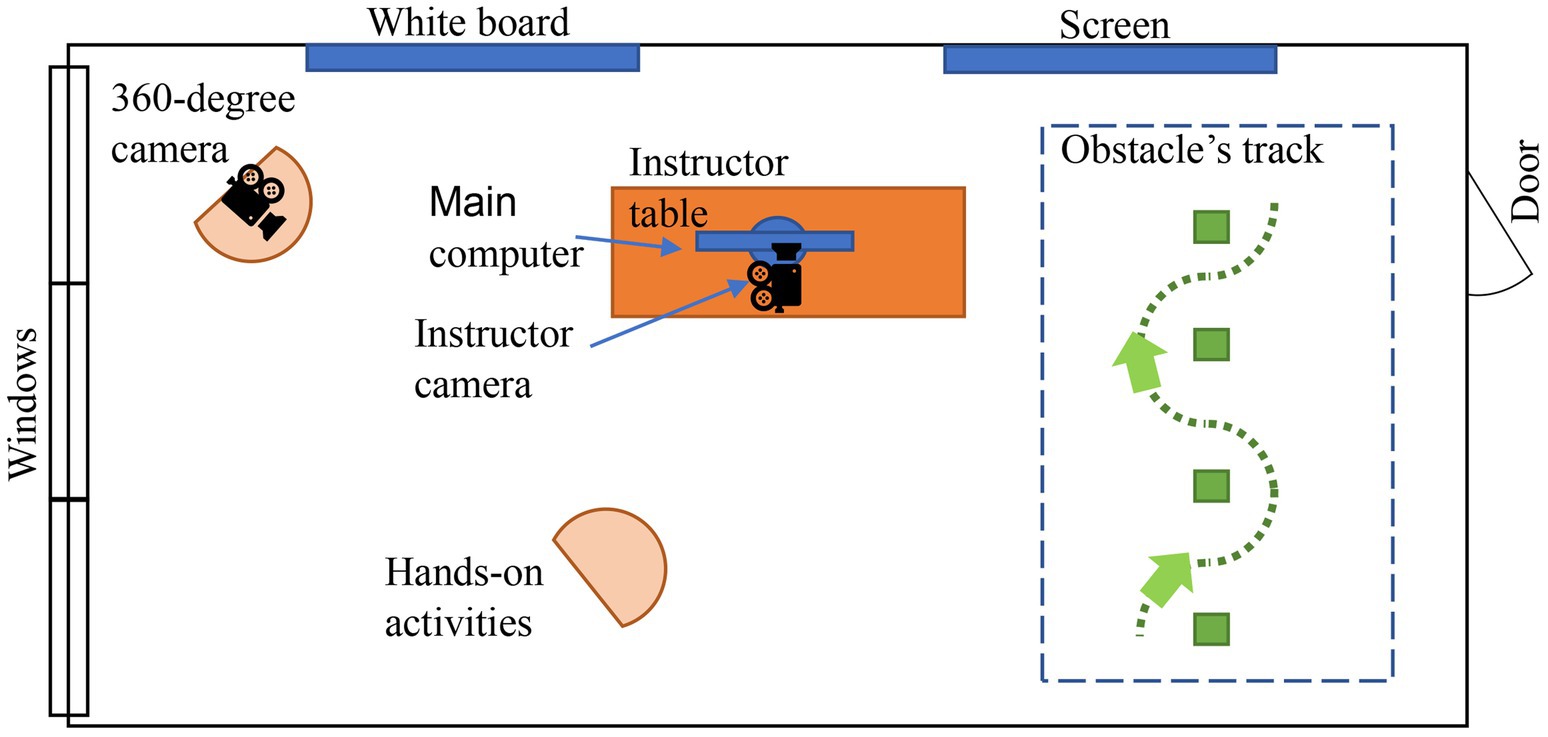
Figure 5. Workshop classroom design describes the learning environment in which workshops are conducted. In the front of the classroom, a screen for presenting slides and a whiteboard were placed for use in practical activities. One camera was connected to the instructor’s computer and Zoom. The second one was connected to the second computer to provide a 360-degree overview from the classroom to Zoom. The obstacle track was set up in the classroom; arrows indicated the TPRs moving in direction. One classroom side was covered with windows.
Each workshop was opened with an introductory session, offering a technical overview of TPRs and explaining the structure of training. After that, the participants were given access to a TPR link via Zoom. Following this, a virtual tour was provided. The practical tasks assigned then to the participants included navigating an obstacle course, delivering mini lectures, and interacting with the class. The session concluded with a focus group discussion, where participants reflected on their experience, particularly focusing on their use of TPRs and views on TPR applications.
The workshops were attended by a diverse group of participants, the majority of them working in higher education (71%). A smaller number of the participants had a general education background (27%) and one person (2%) represented early childhood education. While teachers from Estonia constituted the majority (36), participants from the countries such as Cyprus (14), Austria (2), Finland (1), Portugal (1), Greece (1), and Belgium (1) were also present. Focus group interviews were conducted with a total of 43 participants.
Focus group discussions aimed at identifying challenges and opportunities in the use of TPRs were inspired by three open-ended questions: Under which circumstances is it appropriate to use TPRs in education? How should the teachers and students involved in TPR-mediated education be prepared for it? What kind of technical and other support does effective use of TPRs require? The discussions were transcribed, anonymized, and analyzed using thematic content analysis. As a result, we developed scenarios for the use of TPRs and listed the factors that contribute to or hinder their effectiveness. Figure 6 illustrates the concept map of the thematic content analysis of focus group interviews.
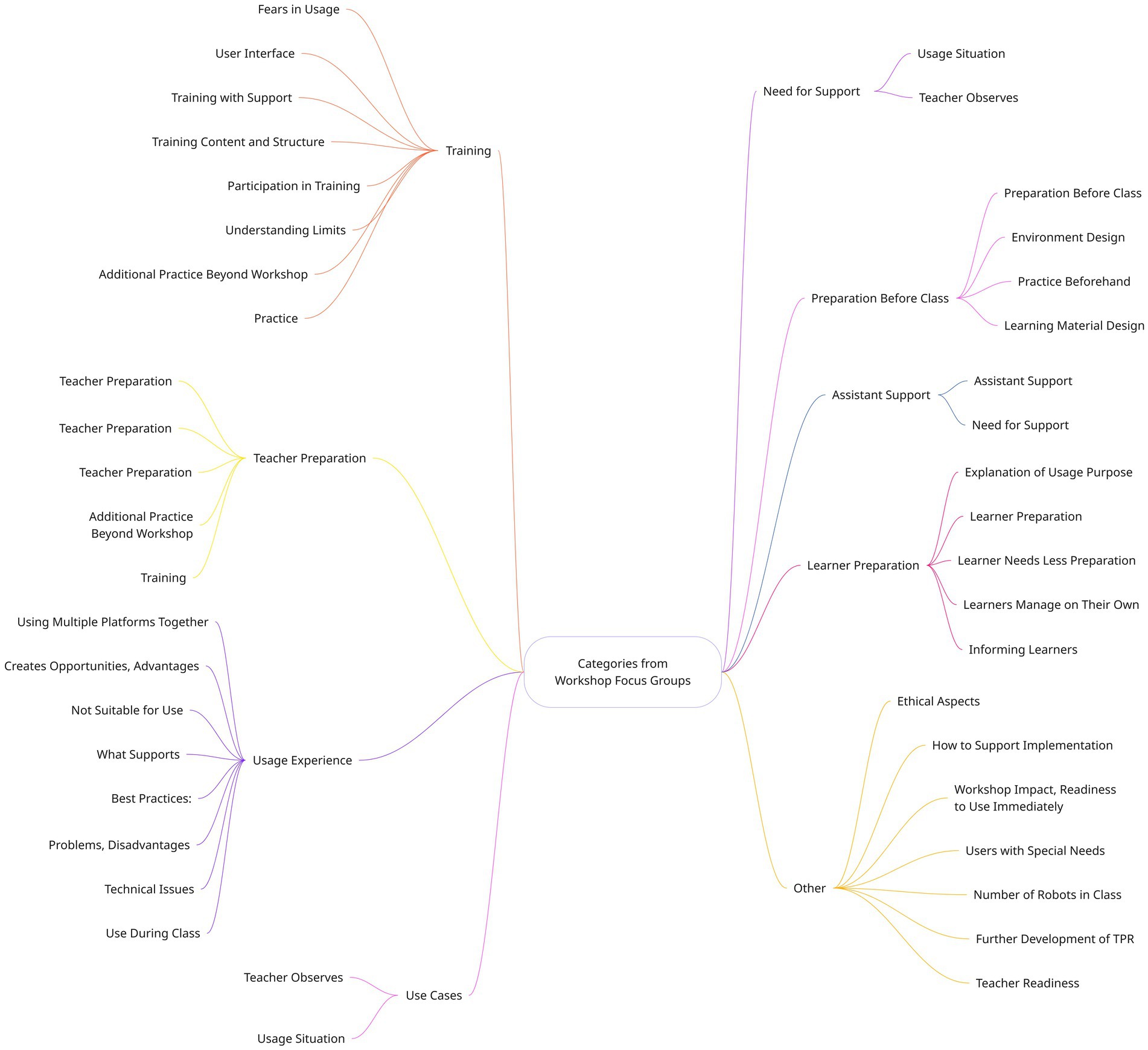
Figure 6. Conceptual map of Study 3 Thematical Categories. This conceptual map categorizes feedback from workshop focus groups, detailing aspects such as need for support, preparation before class, training, assistant and student preparation, teacher preparation, and other factors including ethical aspects and future directions for TPR development.
2.3.2 Results: educational scenarios for the use of TPRs and factors that contribute to or hinder their effectiveness
2.3.2.1 Instances of use
The respondents identified multiple scenarios under which they considered TPR integration justified, including situations where physical attendance might be restricted by illness, injury, or geographic limitations. TPRs were further perceived as beneficial for remote monitoring of collaborative assignments, virtual access to restricted zones such as specialized laboratories with strict biosafety and security requirements, and observation of practical skill acquisition. One participant elaborated on this extended application: “At that time, I also felt that looking back now on that period of distance learning, especially for music lessons, one big advantage was truly that I could observe more closely how the students hold their instruments or which keys they press, and so on – how their finger positions are and all these kinds of things.” (P10F).
2.3.2.2 Assistance
The participants reiterated the necessity of having technical support staff available to address logistical demands and emergent hardware or software issues throughout the TPR-mediated instruction. On-site assistance was deemed especially critical for teachers operating the TPR to ensure uninterrupted educational delivery. One respondent explained the need for technical support: “You need an assistant because, well, the instructor should focus on the educational content and facilitating teaching, not on dealing with one particular person or maybe several, especially if they are present as robots.” (P29F).
2.3.2.3 Preparation
The teachers emphasized the importance of thorough training and iterative practice sessions to build confidence and aptitude in TPR use. Recommendations included offering blended professional development training, encompassing both online tutorials and in-person workshops to enhance skill acquisition. One teacher stressed that it is important to open the wide variety of possibles TPR uses in education: “Collecting a lot more possibilities because this is a new technology, and there are hundreds of different ways to use it.” (P43M).
2.3.2.4 Additional issues
Some participants suggested that there should not be more than 1–2 robots in simultaneous use. One respondent suggested “I would actually prefer if the school had fewer robots in use, but those robots would be truly high-quality, with a good quality image, adjustable to as short a time delay as possible.” (P13F) Some participants discussed the ethical perspective of making education accessible. The importance of making additional support available to organizations adopting TPRs was also mentioned. Several participants discussed technical aspects related to the development of TPRs, for example, whether integrating VR solutions in robots might be desirable or whether it would be necessary to further develop the user interface to simplify the use of the robots. One respondent argued that “The user interface of this telepresence robot is not up to date.” (P35M).
3 Aggregated results
3.1 The opportunities and limitations of using TPRs in teaching and learning
This study confirms previously noted opportunities of using TPRs, such as enhanced social presence, increased student engagement, and greater flexibility in classroom dynamics, enabling meaningful remote participation in education and providing access to specialized environments (e.g., laboratories). Although many of these opportunities have already been recognized in earlier literature, these results add to the body of literature by recognizing the noted advantages across multiple robot platforms, including the recently released TEMI v3 robot (July 31, 2023). Our results suggest that observed benefits such as enhanced social presence and classroom flexibility are consistent, regardless of specific robot types. As for limitations, the results similarly highlight previously noted technical challenges, such as connectivity disruptions, spatial navigation constraints, and issues related to audio-visual clarity. However, the methodological approach of testing these challenges systematically in this study with multiple TPRs in (including the newest available technology) highlights that the persistence of technical problems is not merely attributable to individual robot models but is inherent in the current state of telepresence robotics technology itself. Recognizing this generalized limitation emphasizes the urgent need for further technological development and targeted improvements to infrastructure if TPR-mediated hybrid learning is to become genuinely scalable and reliable.
3.2 Knowledge, skills, and preparation required from teachers and students to use TPRs effectively
Studies 2 and 3 demonstrate that the effective use of TPRs requires comprehensive preparation from both teachers and students. Teachers need technical skills for operating TPRs, including managing dual screens and troubleshooting basic technical issues. The study also stressed the importance of iterative practice sessions, professional development workshops, and a well-structured model of building up confidence. Students need initial orientation on the operation of TPRs and an understanding of classroom dynamics. Although this result is seemingly similar to ones achieved in previous studies, it highlights that even technologically proficient users, such as PhD students in technical fields, encounter notable challenges when adapting to classroom dynamics via TPRs. It seems that the use of TPRs could demand complex cognitive and situational adjustments, not merely technical competence. Thus, targeted orientation on classroom interaction dynamics is crucial, irrespective of users’ technical expertise. In addition, structured support such as on-site technical assistance remains essential to reduce potential disruptions and facilitate smooth, meaningful integration of robots into educational environments.
4 Developing a pedagogical design model
By consolidating the knowledge derived from the review of the state-of-the-art literature and our empirical studies – the interviews, a 13-week hybrid course, and teacher workshops– we designed the final model that is presented as a PEPCII model for the effective use of TPRs. Each of its categories aligns with the Technological Pedagogical Content Knowledge (TPACK) framework (Mishra and Koehler, 2006), while also addressing technology acceptance concerns identified in the broader technology acceptance literature. Table 1 compares the Perifanou (2023) TRinE 4D, Chan et al. (2022) 4C, and the PEPCII model.
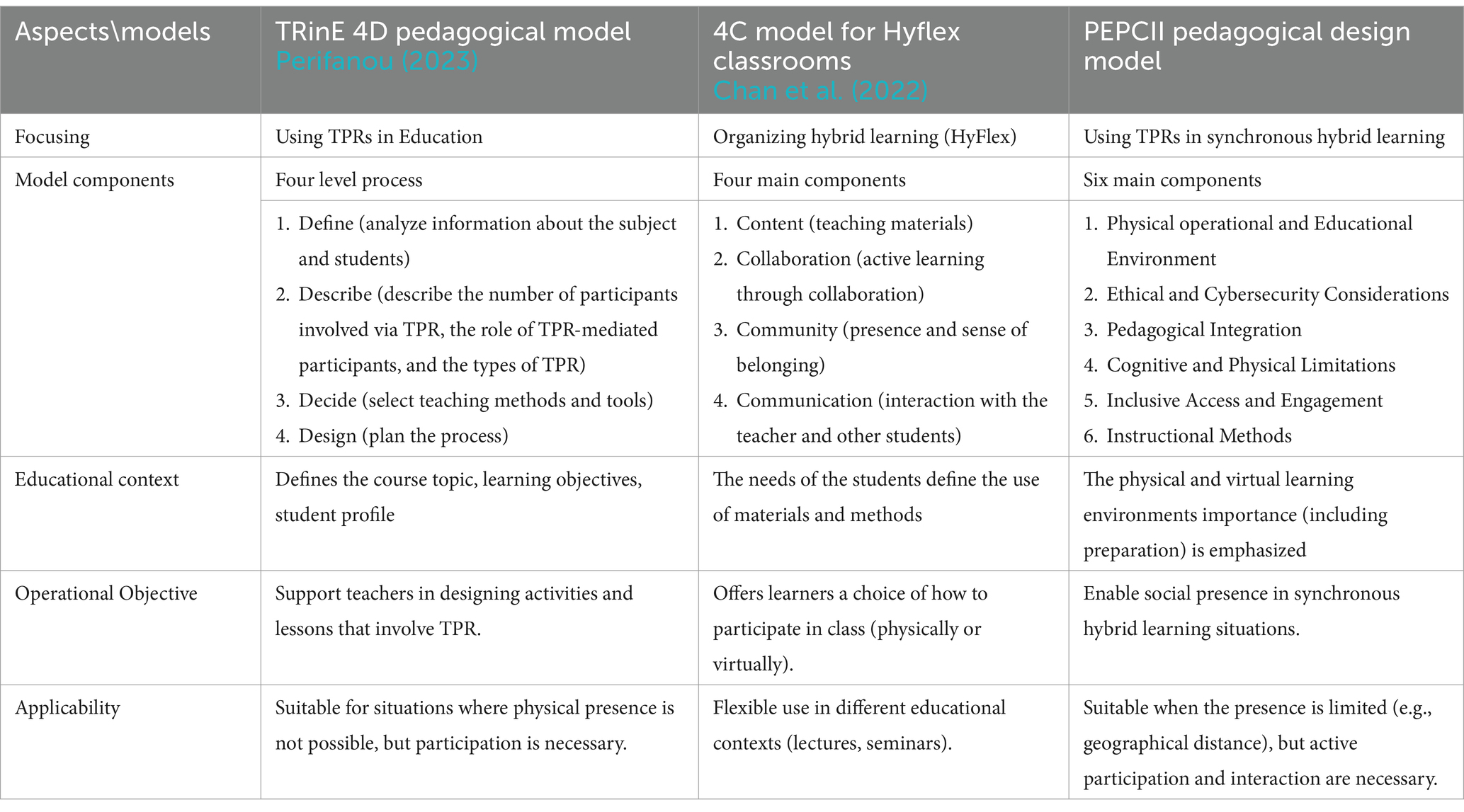
Table 1. Comparisons of TRinE 4D, 4C and the PEPCII model.
The purpose of TRinE 4D is to provide teachers with support for adopting TPRs in teaching and adapting their teaching accordingly. The 4C model offers a hybrid learning framework that enables flexible and active communication through technology, including using TPRs. As a distinct advancement from the previous models, the PEPCII pedagogical design model reveals that in addition to the technical aspects, the use of TPRs in hybrid learning must address the importance of ethical concerns and the systematic need to support teachers and students in their use of TPRs. To provide a better learning experience and improve the quality of learning, cognitive and physical limitations must also be considered. In summary, the PEPCII model offers a broader approach to effectively adopting TPRs, and as it addresses both technology and pedagogy aspects, it can help to create higher-quality and more inclusive hybrid learning environments.
In addition, as compared to the TRinE 4D and 4C models, the PEPCII model emphasizes some of the particularly critical aspects related to adopting TPRs as an emerging technology, drawing attention to ethics, student engagement, and high cognitive load. TRinE 4D and 4C primarily focus on teaching strategies and collaboration in hybrid environments, while overlooking data protection and equitable access issues. The PEPCII model explicitly raises the issues of ethics and cybersecurity to mitigate the risks arising from these domains and to ensure the responsible use of technology. It also addresses potential problems associated with cognitive load, which are often neglected as the primary focus tends to be on the planning and organization of learning activities. The PEPCII model brings challenges related to cognitive load into focus and offers potential remedies. By applying the PEPCII model to TPRs, we ensure their sustainable and effective use in hybrid learning.
As a result of the study, the PEPCII model that stands for Pedagogical Design Model for Integrating Telepresence Robots in Synchronous Hybrid Learning was developed. PEPCII is an acronym derived from six components (see Figure 7) that pertain to various aspects of using TPRs. The PEPCII model was created based on empirical studies and related literature. Table 2 connects the PEPCII components with our empirical findings and some of the previously published articles. The components of the PEPCII model are the following: (a) Physical Operational and Educational Environment, (b) Ethical and Cybersecurity Considerations, (c) Pedagogical Integration, (d) Cognitive and Physical Limitations, (e) Inclusive Access and Engagement, and (f) Instructional Methods.
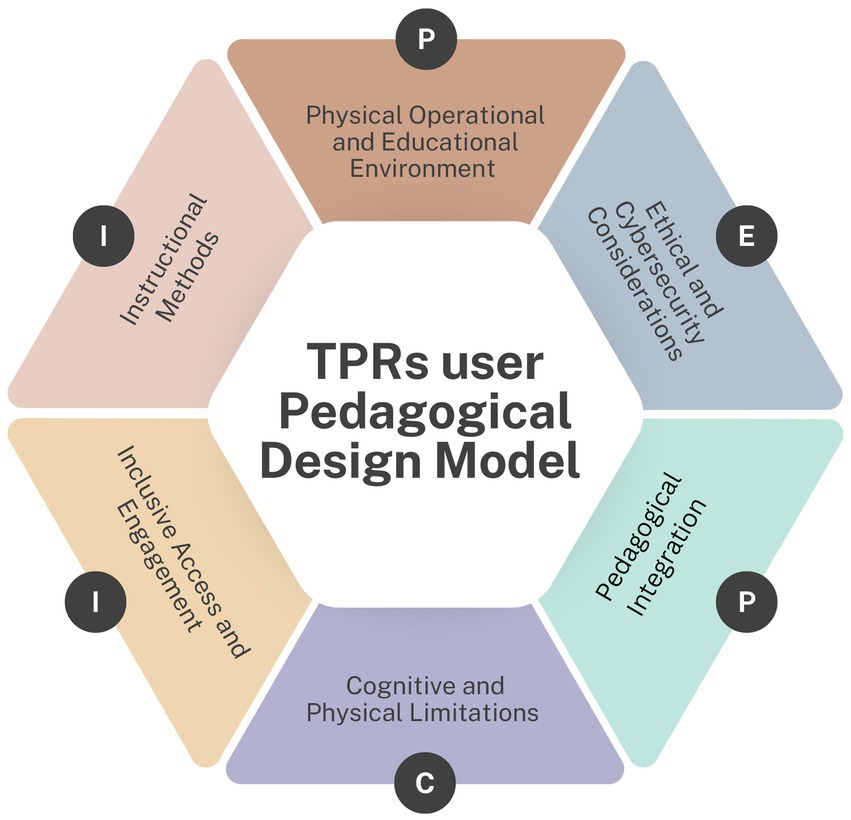
Figure 7. Visualizes the components of the PEPCII Pedagogical Design Model for TPR users.
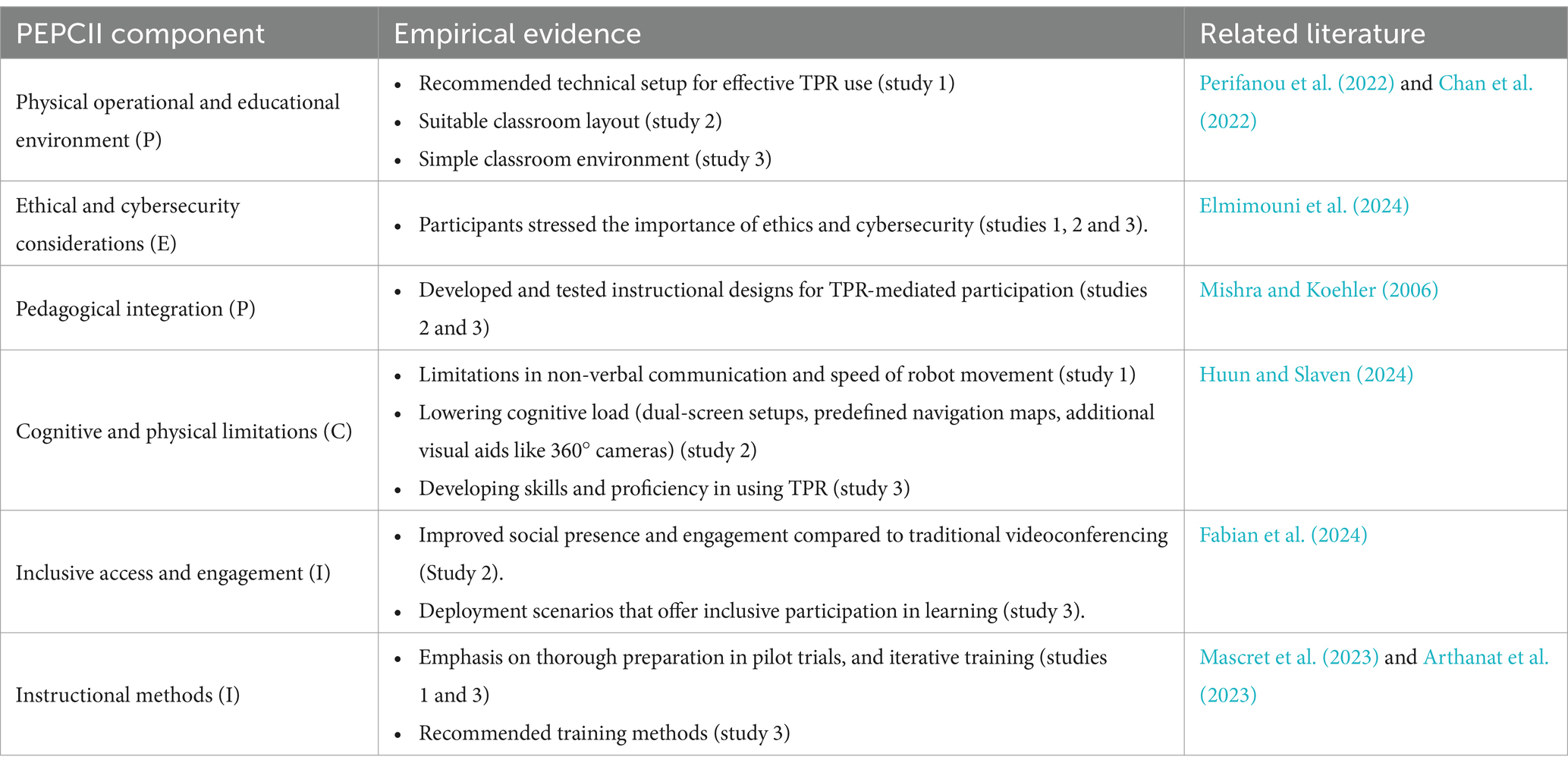
Table 2. Traceability table between PEPCII components, empirical evidence and previously published papers.
4.1 Physical operational and educational environment (P)
This Component of the model consists of two subcomponents. First, it describes the requirements and recommendations for the environment where the TPR operates, including ensuring the highest possible quality of the remote presentation and maintaining focus during the delivery of the lesson. Second, it describes the environment where the TPR moves and operates, addressing the infrastructure readiness for integrating TPRs into the educational process and ensuring the well-being of all individuals involved.
In Study 1, the teachers highlighted that for the effective use of TPR, attention must be paid to the design of the learning environment, including such details as the arrangement of the furniture. The layout of the learning environment affects how actively the TPR-mediated student can engage with what is happening in the physical classroom through hearing and seeing. One interviewee explained.
Study 2 confirmed the previously mentioned results. The possibility of using predefined maps and mapping paths of the robot’s movement helps to reduce the students’ cognitive load while navigating the learning environment.
The simplified classroom layout used in Study 3 confirmed that the user experience and satisfaction of the TPR-mediated participant are directly influenced by the setup of the learning environment.
4.2 Ethical and cybersecurity considerations (E)
In Study 2, the students were concerned that the robots’ cameras might compromise the privacy of other individuals present in the learning environment. According to some of the students, it is also important to consider ethical questions, such as obtaining consent and being aware of the situation. The students also pointed out potential cybersecurity risks associated with the use of TPRs. For example, that unauthorized use of robots might allow access to confidential information.
The participants in Study 3 emphasized that at the organizational level it is important to consider how to use TPRs in school environments. These observations indicate that ethics and cybersecurity are essential aspects when using TPRs in educational settings.
4.3 Pedagogical integration (P)
The Pedagogical Integration component provides recommendations for designing an educational process that enables participants’ active involvement through TPRs, including the use of assessment methods that support learning by means of feedback and adaptive teaching techniques.
Study 2 focused on the pedagogical aspects of using TPRs in a real learning situation over a 13-week period. During the course, the use of TPRs was tested in various active learning formats, including group work. Participating students valued highly the integration of TPRs into teaching.
In Study 3, the participants stressed the need to align the use of TPRs with the expected learning outcomes, while maintaining the importance of flexibility and the use of prepared supportive materials. Based on these insights, we conclude that it is essential to emphasize the importance of instructional design in the use of TPRs in teaching– moving beyond their mere physical presence in the instructional space.
4.4 Cognitive and physical limitations (C)
This component addresses particular cognitive and physical challenges related to the use of TPRs and offers solutions for overcoming some of the related limitations. Regarding cognitive challenges, it highlights the creation of conditions that allow users to focus on learning and teaching, such as designing a user-friendly environment and preparing for participation through TPRs. For physical challenges, it specifies the support a TPR user needs to effectively engage in the learning process remotely.
In Study 2, the participating students noticed cognitive overload when engaging in learning activities through TPRs – especially when they had to use additional learning materials or present something themselves. To reduce the cognitive load, they suggested using multiple monitors and visual aids.
In both Study 1 and Study 3, the participants identified slow navigation and signal transmission delays as issues of concern. The participating teachers pointed out that delays in signal transmission hinder real-time response and dynamic interaction. Based on the above, we argue that addressing physical and cognitive limitations constitutes a significant aspect of the effective use of TPRs in education.
4.5 Inclusive access and engagement (I)
This component of the proposed model covers ensuring equal access to teaching for all participants through the adaptation to diverse learning needs and providing a learning environment that respects cultural differences. All our studies highlighted that using TPRs enables active participation when physical presence is not possible.
In Study 3, the participants saw the potential of using TPRs in special education or for students in rural schools. Based on the above, the use of TPRs ensures better accessibility to education and enhances student engagement.
4.6 Instructional methods (I)
The Instructional Methods’ component of our model focuses on particular aspects critical to facilitating the educational process, such as providing clear instructions, offering additional training opportunities, and promoting the visibility of best practices.
In Study 1, the participants emphasized the need for thoughtful lesson planning and the development of backup plans. They considered prior practice, rehearsing the planned activities, equipment checks, and the availability of technical support during the learning process as key to a successful TPR experience.
The participants in Study 3 mentioned that practical workshops and training sessions help to increase teachers’ confidence and allow building their competence. According to the participants, the successful adoption of TPRs depends on the availability of training materials, opportunities for experience sharing, and hands-on practice.
Prior research (e.g., Elmimouni et al., 2024) has already suggested that systematically addressing challenges caused by the use of TPRs can significantly improve students’ learning experience. Our final study has strengthened this point by demonstrating how explicit instructions on classroom lighting, slide color combinations, recommended TPR speeds, and designated communication channels for immediate technical support can substantially reduce both teachers’ and students’ cognitive load, thus supporting our step-by-step approach (Kasuk and Virkus, 2024).
The use of the PEPCII model in the adoption of TPRs in education will ensure a systematic approach to improving the quality of synchronous hybrid learning, allowing students to be socially present in the learning environment. Following the recommendations outlined in this article ensures that the use of TPRs in the classroom remains ethical, pedagogically effective, and inclusive for all participants. Accordingly, the PEPCII model supports sustainable technology innovation in education.
5 Discussion
The findings presented in this study demonstrate both the benefits and the complexity of integrating TPRs in hybrid educational environments. By triangulating evidence from the three studies, this research contributes to the existing literature on technology integration (Mishra and Koehler, 2006; Elmimouni et al., 2024; Kasuk and Virkus, 2024) and underscores the importance of developing carefully calibrated pedagogical and technical frameworks for the use of TPRs.
One of our significant findings regarding the adoption of TPRs in education stresses the need to consider more than the mere hardware and software readiness. Educationally effective adoption of robotic technologies in education requires a coordinated approach across multiple domains of knowledge and practice. Although prior models such as TPACK have already revealed the interplay between technological, pedagogical, and content knowledge (Mishra and Koehler, 2006), the current article affirms that operational, cognitive, physical, ethical, and instructional dimensions are equally critical for ensuring effective TPR integration. While the PEPCII model proposed here aligns with the TPACK framework, it is unique in explicitly incorporating considerations covering distinct aspects of physical learning environments and issues such as inclusivity, ethics, and cybersecurity. Teachers’ testimonies related to the indispensability of the well-structured support – be it in the form of on-site assistants, carefully prepared classrooms, or professional development workshops – further reflect the iterative nature of technology acceptance processes conceptualized in broader frameworks such as TAM and UTAUT (Arthanat et al., 2023; Mascret et al., 2023).
Consistent with some of the earlier studies, our research confirms that TPR-mediated learning can promote a heightened sense of presence and autonomy as compared to conventional video conferencing tools, thereby mitigating student disengagement in hybrid settings (Kasuk and Virkus, 2024). The results of our Study 2 demonstrate that providing users with low-cognitive-load solutions, for instance, dual-monitor setups and pre-mapped classroom navigation, reduces the time spent on troubleshooting and task-switching, ultimately improving the quality of instruction. Additionally, TPRs’ mobility supports spontaneous interaction among the participants and their social presence – outcomes that are particularly germane for remote students who would otherwise have limited access to in-person activities (Huun and Slaven, 2024).
Nonetheless, significant barriers persist. Challenges such as weak internet connectivity, audio-visual disruptions, and limited navigational dexterity suggest a delicate balance between technology’s affordances and accompanying constraints (Kasuk and Virkus, 2024). TPR-mediated instruction entails heightened dependence on stable infrastructures and support staff; teachers working under conditions of limited resources may find it difficult to adopt TPRs as extensively as sometimes recommended. Additionally, the novelty of TPR-mediated learning requires ongoing professional development for both teachers and technical support teams, emphasizing the socio-technical nature of technology uptake (Perifanou, 2023).
Moreover, the importance of detailed pedagogical planning cannot be overstated. Participant feedback from our studies 1 and 3 showed that success hinges on aligning TPR functionality with specific educational objectives. Whether delivering synchronous lectures or supporting remote student presence, teachers must proactively plan for their activities to capitalize on the benefits of TPR mobility and camera functionalities. This calls for targeted orientation sessions to explain operational protocols, share digital literacy expectations, and describe the accessibility model. Partial reliance on participants with IT or information-science backgrounds may lead to a higher collective competence of the entire group of participants than what one might expect finding among regular teachers. Future research involving a wider demographic variety of teachers and students can help assess the transferability of our model to other subject areas and across educational levels.
Lastly, ethical considerations, particularly surrounding the issues of security and inclusivity, warrant permanent attention. Study 3 activities and workshop discussions support the view that the use of TPRs in sensitive environments, such as laboratories and other specialized facilities, gives rise to additional complexities related to controlling camera angles, maintaining privacy, and clarifying data-handling protocols. These insights corroborate earlier findings (Elmimouni et al., 2024) that a structured approach to data security, supported by institutional policy, is essential for mitigating potential risks associated with remote access.
In summary, our findings confirm that TPRs offer a promising medium for enhancing synchronous hybrid learning when integrated with systematically developed pedagogical frameworks, sustained technical support, and inclusive policy guidelines. Although TPR deployment can be resource-intensive, strategic planning and gradual professional development substantially alleviate such challenges. The resulting PEPCII model offers a comprehensive lens for researchers, practitioners, and policymakers to interrogate the pedagogical and logistical prerequisites for TPR adoption.
6 Conclusion
The research project described in this article contributes to the growing body of literature on telepresence robots in education by proposing and validating a PEPCII model that offers a structured approach to TPR integration. Building on the already established technology-integration frameworks such as TPACK, SAMR, and TAM, the model addresses the multifaceted nature of TPR use in hybrid learning contexts. Through three studies, the research has captured both the promises and the practical challenges inherent in TPR implementation.
Some of the key outcomes of our research demonstrate that TPR-mediated instruction supports improved presence, facilitates flexible class participation, and extends the physical boundaries of the classroom. However, realizing these benefits requires robust support mechanisms, including on-site technical personnel, careful lesson planning, reliable internet infrastructure, and thorough training for both teachers and students. A consistent theme across our studies has been the necessity of proactively reducing cognitive load – by way of dual-screen setups, comprehensive classroom mapping, and seamless integration of digital tools.
Despite the promising outcomes of the three studies, certain limitations must be acknowledged. First, several technical challenges remained unresolved throughout the research. Participants reported persistent issues such as unstable internet connections, audio delays in large classroom environments, and limited navigational control of the TPRs, particularly in settings with obstacles or cluttered layouts. Even with the implementation of solutions such as dual-screen setups, 360-degree cameras, and pre-mapped classroom layouts, these technical problems occasionally disrupted communication and reduced the level of participants’ engagement. For example, delayed voice transmission often impaired real-time discussions, and momentary disconnections negatively affected the continuity of learning sessions.
Second, the prior experience and background of the participants had an impact on study outcomes. Many of the teachers and students involved had prior professional or academic experience in information technology or educational technology. Their familiarity with digital tools and openness to experimentation most likely contributed to the successful adoption of TPRs, and the richness of feedback provided. However, this introduces a potential bias, as these users may have been more inclined to overlook or adapt to technical shortcomings than educators with less technological confidence. As such, the generalizability of the findings to broader, more diverse educational settings may be limited.
However, although the relatively small sample size of six teachers and six students limits the generalizability of our results, the qualitative approach adopted helps to bring out the depth of insight of the participants, offering understanding of specific challenges and opportunities in adopting TPRs in higher education, and informing subsequent larger-scale research and pedagogical design. Future research should explore how these challenges affect populations with lower levels of digital literacy and explore long-term technical reliability and support requirements for sustainable TPR integration across varied educational contexts.
This research provides a practical roadmap for embedding TPRs in academic contexts by synthesizing best practices and addressing common challenges. With continuous refinement, thoughtful instructional design, and collaborative effort among the stakeholders, telepresence robots have the potential to transform hybrid education into an inclusive, interactive, and sustainable learning environment – ultimately enriching the educational experience for remote and in-person students alike.
Data availability statement
The datasets presented in this article are not readily available due to confidentiality agreements, participant privacy concerns, or institutional policies. No data sharing is permitted to ensure the protection of sensitive information. Requests to access the datasets should be directed to dGlpbmEua2FzdWtAdGFsdGVjaC5lZQ==.
Ethics statement
Ethical review and approval was not required for the study on human participants in accordance with the local legislation and institutional requirements. The studies were conducted in accordance with the local legislation and institutional requirements. Written informed consent from the participants was not required to participate in this study in accordance with the national legislation and the institutional requirements.
Author contributions
TK: Conceptualization, Data curation, Investigation, Methodology, Project administration, Resources, Visualization, Writing – original draft, Writing – review & editing, Formal analysis. JL: Conceptualization, Methodology, Supervision, Writing – review & editing, Validation. SV: Supervision, Writing – review & editing.
Funding
The author(s) declare that no financial support was received for the research and/or publication of this article.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Generative AI statement
The author(s) declare that no Gen AI was used in the creation of this manuscript.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Arthanat, S., Rossignol, H., Preble, E., Grimm, K., Corvini, M., Wilcox, J., et al. (2023). Perspectives on a telepresence robot at an independent living facility: lessons learned and implications. J. Enabling Technol. 18, 1–12. doi: 10.1108/JET-05-2023-0014
Cha, E., Chen, S., and Mataric, M. J. (2017). “Designing telepresence robots for K-12 education,” in 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN). IEEE, 683–688. doi: 10.1109/ROMAN.2017.8172377
Chan, H. C. B., Dou, Y., Jiang, Y., and Li, P. (2022) A 4C model for Hyflex classrooms, in 2022 IEEE 46th Annual Computers, Software, and Applications Conference (COMPSAC), 145–150.
Davis, F. D. (1989). Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Q. 13, 319–340. doi: 10.2307/249008
Elmimouni, H., Šabanović, S., and Rode, J. A. (2024). Navigating the cyborg classroom: telepresence robots, accessibility challenges, and inclusivity in the classroom. ACM Trans. Access. Comput. 17, 1–21. doi: 10.1145/3672569
Fabian, K., Smith, S., and Taylor-Smith, E. (2024). Being in two places at the same time: a future for hybrid learning based on student preferences. TechTrends 68, 693–704. doi: 10.1007/s11528-024-00974-x
Fischer, A. J., Bloomfield, B. S., Clark, R. R., McClelland, A. L., and Erchul, W. P. (2019). Increasing student compliance with teacher instructions using telepresence robot problem-solving teleconsultation. Int. J. Sch. Educ. Psychol. 7, 158–172. doi: 10.1080/21683603.2018.1470948
Häfner, P., Wernbacher, T., Pfeiffer, A., Denk, N., Economides, A., Perifanou, M., et al. (2023). “Limits and benefits of using telepresence robots for educational purposes” in Learning in the age of digital and green transition. ICL 2022. Lecture Notes in Networks and Systems. eds. M. E. Auer, W. Pachatz, and T. Rüütmann, vol. 634 (Cham: Springer), 23–33.
Han, J., and Conti, D. (2020). The use of UTAUT and post acceptance models to investigate the attitude towards a telepresence robot in an educational setting. Robotics 9:34. doi: 10.3390/robotics9020034
Huun, K. M., and Slaven, J. E. (2024). Robotic telepresence and face-to-face collaborative nursing simulation: a correlational, cross-sectional study. Clin. Simul. Nurs. 90:101525. doi: 10.1016/j.ecns.2024.101525
Inan, F. A., and Lowther, D. L. (2010). Factors affecting technology integration in K-12 classrooms: a path model. Educ. Technol. Res. Dev. 58, 137–154. doi: 10.1007/s11423-009-9132-y
Kasuk, T., and Virkus, S. (2024). Exploring the power of telepresence: enhancing education through telepresence robots. Inf. Learn. Sci. 125, 109–137. doi: 10.1108/ILS-07-2023-0093
Leoste, J., Õun, T., Loogma, K., and San Martín López, J. (2021). Designing training programs to introduce emerging technologies to future workers—a pilot study based on the example of artificial intelligence enhanced robotics. Mathematics 9:2876. doi: 10.3390/math9222876
Mascret, N., Vors, O., and Temprado, J.-J. (2023). Mobile telepresence robot as a new service to remotely supervise older adults’ physical activity: effectiveness, acceptance, and perception. Int. J. Soc. Robot. 15, 1243–1260. doi: 10.1007/s12369-023-01025-w
McGraw Hill Canada. (2019). What is TPACK theory and how can it be used in the classroom?. Available online at: https://www.mheducation.ca/blog/what-is-tpack-theory-and-how-can-it-be-used-in-the-classroom/ (accessed: 27 December 2024)
Minsky, M. (1980) Telepresence, OMNI Mag., 44–52. Available online at: https://philpapers.org/rec/MINT (Accessed December 29, 2024).
Mishra, P., and Koehler, M. J. (2006). Technological pedagogical content knowledge: a framework for teacher knowledge. Teachers Coll. Rec. 108, 1017–1054. doi: 10.1111/j.1467-9620.2006.00684.x
Olev, A., and Alumäe, T. (2022). Estonian speech recognition and transcription editing service. Balt. J. Mod. Comput. 10, 409–421. doi: 10.22364/bjmc.2022.10.3.14
Page, A., Charteris, J., and Berman, J. (2021). Telepresence robot use for children with chronic illness in Australian schools: a scoping review and thematic analysis. Int. J. Soc. Robot. 13, 1281–1293. doi: 10.1007/s12369-020-00714-0
Perifanou, M. (2023). ““TRINE 4D pedagogical model”: designing teaching scenarios for using telepresence robots in education” in Responsive and sustainable educational futures. EC-TEL 2023. Lecture Notes in Computer Science. eds. O. Viberg, I. Jivet, P. Muñoz-Merino, M. Perifanou, and T. Papathoma, vol. 14200 (Cham: Springer, Springer), 605–610.
Perifanou, M., Economides, A. A., Häfner, P., and Wernbacher, T. (2022). “Mobile telepresence robots in education: strengths, opportunities, weaknesses, and challenges” in Educating for a new future: Making sense of technology-enhanced learning adoption. EC-TEL 2022. Lecture Notes in Computer Science. eds. I. Hilliger, P. J. Muñoz-Merino, T. De Laet, A. Ortega-Arranz, and T. Farrell (Cham: Springer), 13450.
Raes, A., Detienne, L., Windey, I., and Depaepe, F. (2020). A systematic literature review on synchronous hybrid learning: gaps identified. Learn. Environ. Res. 23, 269–290. doi: 10.1007/s10984-019-09303-z
Short, J., Williams, E., and Christie, B. A. (1976). The social psychology of telecommunications. Available online at: https://api.semanticscholar.org/CorpusID:144403490 (Accessed December 24, 2024).
Smith, C. P. (1992). Motivation and personality: handbook of thematic content analysis. Cambridge: Cambridge University Press.
Tsui, K. M., Desai, M., Yanco, H. A., and Uhlik, C. (2011). Exploring use cases for telepresence robots, in Proceedings of the 6th International Conference on Human-Robot Interaction. HRI’11: International Conference on Human-Robot Interaction, Lausanne Switzerland: ACM, 11–18.
Velinov, A., Koceski, S., and Koceska, N. (2021). A review of the usage of telepresence robots in education. Balkan J. Appl. Math. Inform. 4, 27–40.
Venkatesh, V., Morris, M. G., Davis, G. B., and Davis, F. D. (2003). User acceptance of information technology: toward a unified view. MIS Q. 27, 425–478. doi: 10.2307/30036540
Weibel, M., Nielsen, M. K. F., Topperzer, M. K., Hammer, N. M., Møller, S. W., Schmiegelow, K., et al. (2020). Back to school with telepresence robot technology: a qualitative pilot study about how telepresence robots help school-aged children and adolescents with cancer to remain socially and academically connected with their school classes during treatment. Nurs. Open 7, 988–997. doi: 10.1002/nop2.471
Keywords: telepresence robot, pedagogical design model, synchronous hybrid learning, social presence, technology acceptance
Citation: Kasuk T, Leoste J and Virkus S (2025) Enhancing synchronous hybrid learning with telepresence robots: a PEPCII pedagogical design model for remote and onsite student engagement. Front. Educ. 10:1554065. doi: 10.3389/feduc.2025.1554065
Edited by:
Octavian Dospinescu, Alexandru Ioan Cuza University, RomaniaReviewed by:
Claudio Germak, Polytechnic University of Turin, ItalyOscar Peña-Cáceres, Cesar Vallejo University, Peru
Copyright © 2025 Kasuk, Leoste and Virkus. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Tiina Kasuk, dGlpbmEua2FzdWtAdGFsdGVjaC5lZQ==