 Waleed Alhosaini
Waleed Alhosaini Obaid Aldosari
Obaid Aldosari Salem Batiyah3
Salem Batiyah3- 1Department of Electrical Engineering, College of Engineering, Jouf University, Sakaka, Saudi Arabia
- 2Electrical Engineering Department, College of Engineering, Prince Sattam Bin Abdulaziz University, Wadi Al-Dawasir, Saudi Arabia
- 3Department of Electrical Engineering, Yanbu Industrial College, Yanbu Alsinaiyah, Almadina, Saudi Arabia
Integrating second-life batteries (SLBs) into energy storage systems (ESSs) offers a sustainable and cost-effective solution for extending battery utility. However, the inherent uncertainties and performance variations of these aged batteries present significant challenges in maintaining system stability and efficiency. Hence, this work introduces a robust control strategy employing an H-infinity
1 Introduction
Battery energy storage systems (BESSs) have become increasingly essential in modern power grids due to the rapid growth of intermittent renewable energy sources (RESs) such as solar and wind power. These BESSs provide efficient storage solutions necessary for maintaining grid stability and reliability (Zhao et al., 2025; Lakshmi and Marimuthu, 2025). Hence, BESS addresses this intermittency by storing excess energy during periods of high generation and releasing it when demand peaks or generation drops. Thus, it effectively contributes to supply-demand balancing and enhances grid reliability. Furthermore, BESS improves grid resilience by providing essential ancillary support such as frequency regulation, voltage regulation, and rapid response during grid disturbances (Li et al., 2025; Luo et al., 2021; Khan et al., 2025). This capability significantly reduces reliance on fossil-fuel power plants, lowering operational costs and minimizing environmental impact (Gokul et al., 2022). Consequently, utilities and grid operators increasingly integrate BESS to ensure efficient energy management, improve system efficiency, and support sustainable energy transitions. This growing deployment reflects a fundamental shift towards smarter, more resilient, and environmentally responsible energy infrastructures. However, adopting BESSs in modern power grids faces several challenges, among which, high upfront investment costs remain a significant barrier, despite declining battery prices (Fazeli et al., 2021; Zhang et al., 2023a). Additionally, limited battery lifespan and performance degradation over time pose financial and operational uncertainties (He et al., 2022; Haram et al., 2023).
Hence, second-life batteries (SLBs), which are repurposed from electric vehicles (EVs) after their initial capacity declines, offer significant potential to enhance sustainability and cost-effectiveness in modern power grids. This is due to the fact that SLBs extend the material lifecycle, considerably reducing environmental impacts associated with battery disposal and raw material extraction. The reduced acquisition costs make them particularly attractive for grid operators and utilities seeking affordable solutions to manage intermittent renewable energy. Therefore, deploying SLBs facilitates greater integration of renewables by providing accessible and scalable energy storage, enhancing grid flexibility and stability without incurring prohibitive expenses. Thus, SLBs stand as a crucial component in advancing economically viable and environmentally responsible energy storage solutions within modern power infrastructure. Nevertheless, integrating SLBs into the electric grid involves several notable challenges, particularly the variability in battery health, nonlinear dynamics, and uncertainties associated with renewable generation and load fluctuations. These challenges highlight the need for advanced topologies and control strategies that can ensure stability and reliability under uncertain operating conditions and unmodeled dynamics (Dipti et al., 2020; Mandrile et al., 2023; Hassanpour et al., 2024).
Thus, a two-phase interleaved boost converter (IBC) is selected in this work since it offers higher power handling capability, reduced input and output current ripple, and improved thermal distribution compared to a conventional single-phase boost converter (Zhu et al., 2023; Dai et al., 2023). These features are particularly important when integrating SLBs, whose degraded and uncertain characteristics make them more sensitive to ripple currents and voltage stress. By employing an interleaved structure, the converter ensures smoother current flow and higher efficiency, which leads to extending the lifetime of SLBs and maintaining stable power delivery. At the same time, the inherent parameter uncertainties of SLBs require a robust control strategy. Even though classical linear controllers, such as PI control, remain widely used for power converters because of their simplicity and ease of tuning in steady operating regions, they are not the suitable controllers for applications involving SLBs. This is due to the fact that PI control performance typically degrades under large parametric changes or operating conditions. Thus, they often require re-tuning or gain scheduling for different operating points (Wang and He, 2022; Shan et al., 2020; Gorji et al., 2019; Hameed et al., 2025). Hence, adaptive PID control techniques can normally be adopted for similar systems to track time-varying plants and operating points (Wu et al., 2022). However, the adaptation mechanism of these controllers can be too slow to react to sudden load changes or rapid degradation in SLBs, which may lead to instability during fast transients. To handle the parametric variations of the SLB systems, load variations, and the power converter nonlinearities, advanced control approaches such as sliding mode control (SMC) might be considered due to their finite-time convergence and strong matched disturbance rejection. Nevertheless, SMC suffers from chattering, measurement noise sensitivity, and design complications when unmatched uncertainties or high switching frequency effects appear (Zhang et al., 2023b). Model predictive control (MPC) provides explicit constraint handling and multivariable performance capability, yet MPC can be computationally heavy for fast switching converters and requires accurate prediction models and forecasts (Korada and Mishra, 2023). Thus, H-infinity (
This study proposes the use of an advanced control strategy, i.e.,
2 System description and modeling
The investigated system, shown in Figure 1, consists of a battery energy storage system (BESS), mainly a SLB connected to a two-phase IBC through an internal resistance, i.e., Rint, a DC-link capacitor, i.e., CLink, supplying power to a resistive load. The two-phase IBC consists of two identical boost converter legs connected in parallel at the input and series-connected at the output through a common DC bus. The converter consists of, 1) two input inductors, i.e., L1 and L2, one inductor for each phase, to store and transfer energy during switching; 2) power semiconductor devices, i.e., S1 and S2, to control the energy transfer by alternating between ON and OFF states in each phase, 3) two diodes, i.e., D1 and D2, provide a current path to the output when the switches are OFF, enabling the inductors to discharge energy to the load, and 4) an output capacitor, i.e., Cout to smooth out the pulsating current delivered from both phases and maintains a steady DC output voltage (Zhu et al., 2023; Dai et al., 2023). The converter supplies power to resistive loads, i.e., R1 and R2 as demonstrated in Figure 1. Together, these components ensure step-up voltage conversion with reduced ripple, improved efficiency, and enhanced dynamic response.
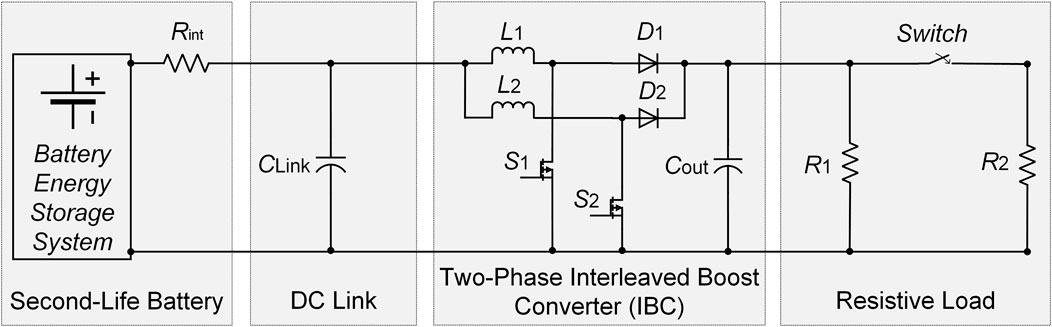
Figure 1. The one-line diagram of the system under investigation.
Even though the SLB exhibits performance limitations, such as increased internal resistance and capacity fade as a result of aging, it serves as an economical and sustainable energy source. The DC-link capacitor stabilizes the input voltage and smooths voltage ripples. Hence, the reliability of the conversion stage is improved. The two-phase IBC is selected to effectively step up the battery voltage to the required higher DC voltage level, while reducing input current ripple, and boosting overall conversion efficiency compared to conventional single-phase converters. A closed-loop control scheme, described later in this work, is developed to effectively regulate the converter’s output voltage, ensuring stable and consistent power delivery to the resistive load despite the inherent uncertainties associated with SLB performance. This integrated system offers a promising solution for sustainably repurposing aged batteries in grid-connected applications.
2.1 Second-life battery (SLB) modeling
In this work, the SLB is modeled to ensure that the aging-induced has influence on its electrical performance. SLBs exhibit notable degradation in capacity, internal resistance, and voltage behavior as a result of the previous usage in electric vehicles, thermal stress, and electrochemical wear (Du et al., 2021). The SLB is represented using an equivalent circuit model consisting of a voltage source Voc (SOC), internal resistance Rint, and degraded capacity CSLB. The open-circuit voltage (OCV) is a function of the state of charge (SOC), represented by a flattened curve due to aging as in Equation 1,
where a and b are empirical coefficients derived from aged battery characterization data.
The increased Rint (typically 0.10–0.30 Ω) causes voltage drop under load that is given by Equation 2,
The CSLB is modeled as in Equation 3,
where D is the degradation factor (typically 30–50% capacity loss).
Now, the SOC is calculated using Coulomb counting using Equation 4,
To account for the performance degradation, the SLB parameters were adapted based on empirical and literature-supported degradation trends, as summarized in Table 1. This model enables the accurate simulation of aged battery dynamics in energy storage systems, particularly in applications involving renewable integration or converter-based grid interfacing. It also provides the foundation for evaluating system-level performance under realistic operating conditions using degraded battery assets.
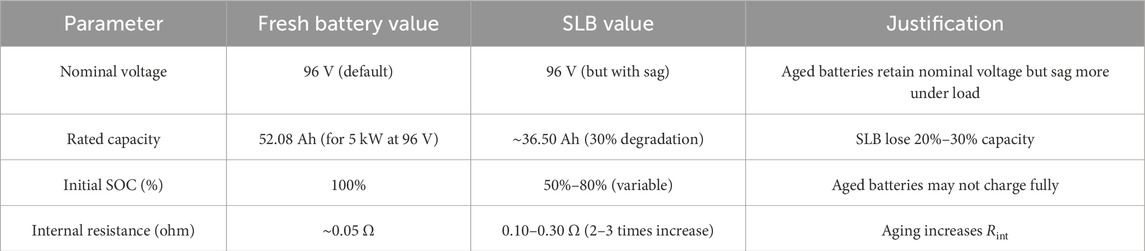
Table 1. Comparative parameters of fresh battery and SLB used in the paper.
2.2 Two-phase interleaved boost converter (IBC) modeling
The simplified state-space model of the two-phase IBC is derived by considering averaged converter small signal approach where the two parallel converter legs are assumed to operate identically but with a 180° phase shift. This interleaving technique improves performance by reducing input and output current ripples and distributing thermal and electrical stress across the switching elements. As illustrated in Figure 1, each phase of the 2-phase IBC comprises an inductor, i.e., L1 and L2, a diode, i.e., D1 and D2, and a controlled power switch, i.e., S1 and S2. Both phases of the two-phase IBC feed into a common output capacitor, i.e., Cout which is connected to a resistive load. By summing the currents of both phases, the system can be represented using an equivalent inductance L, and the total output is connected to a common output capacitor Cout and a resistive load. The model is developed assuming continuous conduction mode (CCM) and ideal components, assuming that the switching ripples and parasitic do not exist. In this case, two state variables are defined, which are the output capacitor voltage, i.e., vout, and the average inductor current, i.e., iL. Assuming ideal components, equal current sharing, and perfectly synchronized operation, the converter can be modeled as a single equivalent boost converter with reduced inductor ripple and effective inductance L/N, where N = 2 for the two-phase case. The state-space equations of the two-phase IBC developed by analyzing energy storage elements during switching intervals (Zhu et al., 2023; Dai et al., 2023).
Assuming ideal and symmetrical operation, the inductor currents share equally, and the total inductor current is defined as in Equation 5,
Using the ripple-averaged approach, the dynamic behavior of the converter is described by Equations 6, 7,
where vout(t) is the output voltage, vin(t) is the input voltage, d is the duty cycle, and N = 2 is the number of interleaved phases.
For small-signal modeling, the equations are linearized around a steady-state operating point as demonstrated in Equations 8–10,
Assuming d is constant during the perturbation analysis and only the input voltage vin(t) is subject to disturbance, the linearized equations, i.e., Equations 11, 12 become,
To simplify the model, D is assumed to be small, such that (1 – D) ≈ 1, which yields Equations 13, 14,
Now, let the state vector and input, i.e., Equation 15, be defined as,
Finally, the system can be expressed in the standard state-space form as presented in Equation 16,
with the system matrices given by Equation 17,
where the state vector is,
This model captures the essential dynamics needed for controller design while preserving simplicity for implementation.
3 H-infinity (
In power electronics applications,
Figure 2 presents the feedback structure of the weighted
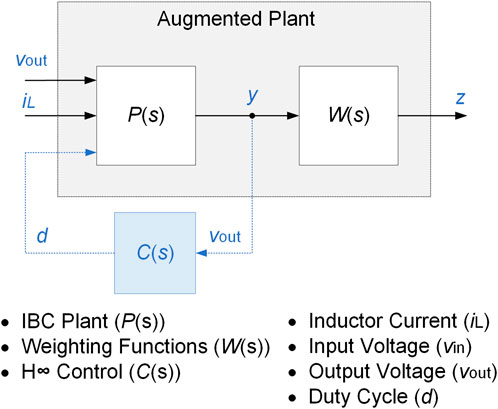
Figure 2. The feedback structure of the weighted
The goal of mixed-sensitivity
While
where γ represents the worst-case closed-loop performance, i.e., performance bound, over all frequencies.
The three weighting functions
The second weighting function,
Finally,
These design objectives were verified in the frequency domain by overlaying the closed-loop transfer functions
Figure 3 demonstrates the closed-loop control system structure used for the
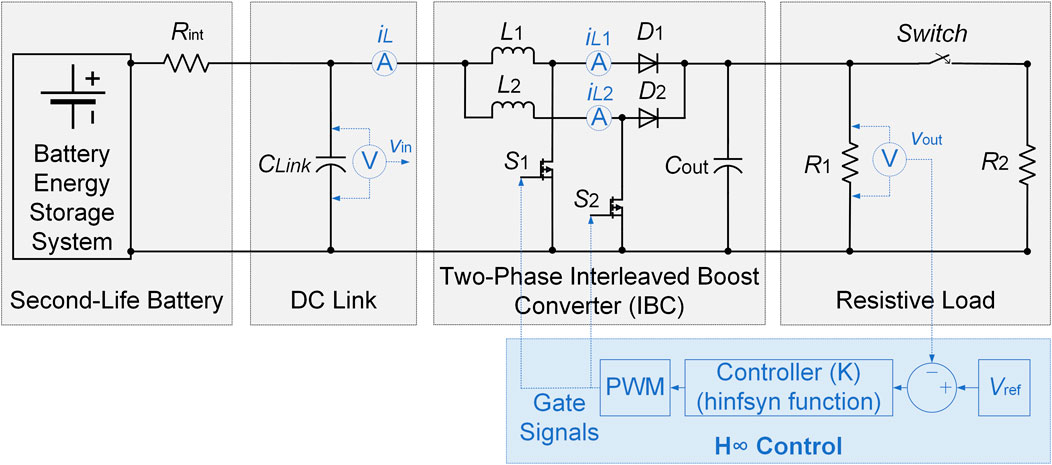
Figure 3. The control block diagram of the proposed
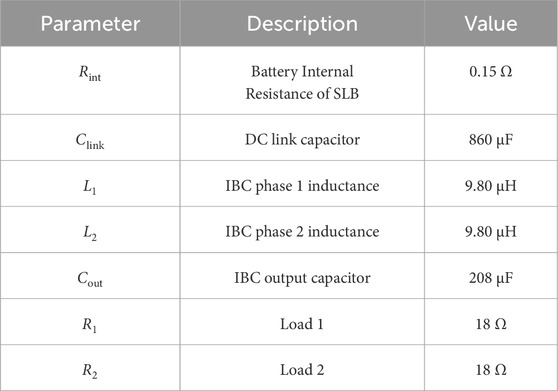
Table 2. Investigated System’s parameters.
Finally, MATLAB’s augw function was used to construct the augmented plant, and MATLAB’s hinfsyn function to solve the problem yields the optimal continuous-time controller
4 Simulation results and discussions
To assess the performance of the proposed
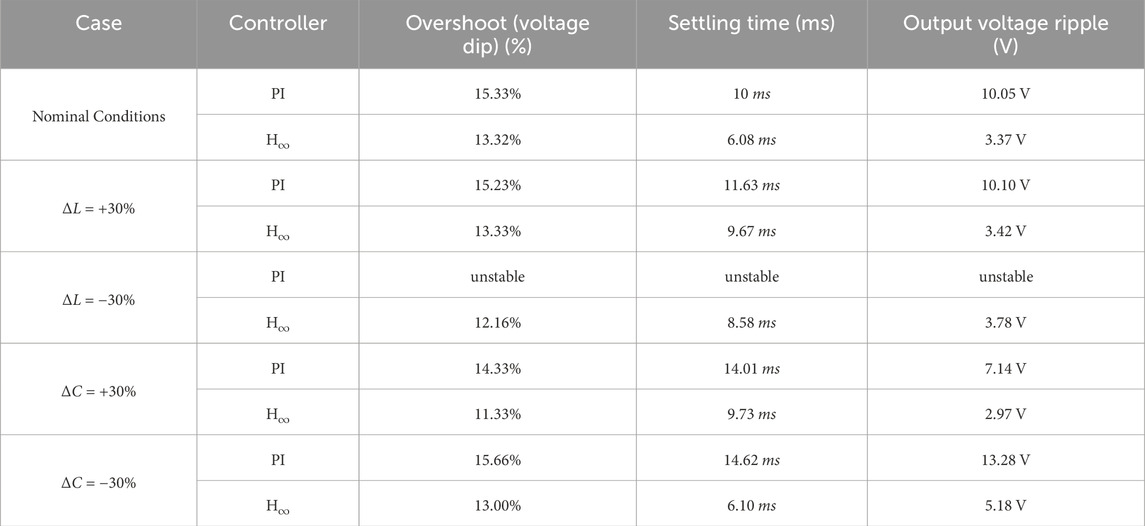
Table 3. Quantitative comparison of PI and
4.1 Comparative performance evaluation for
During the load step change, the
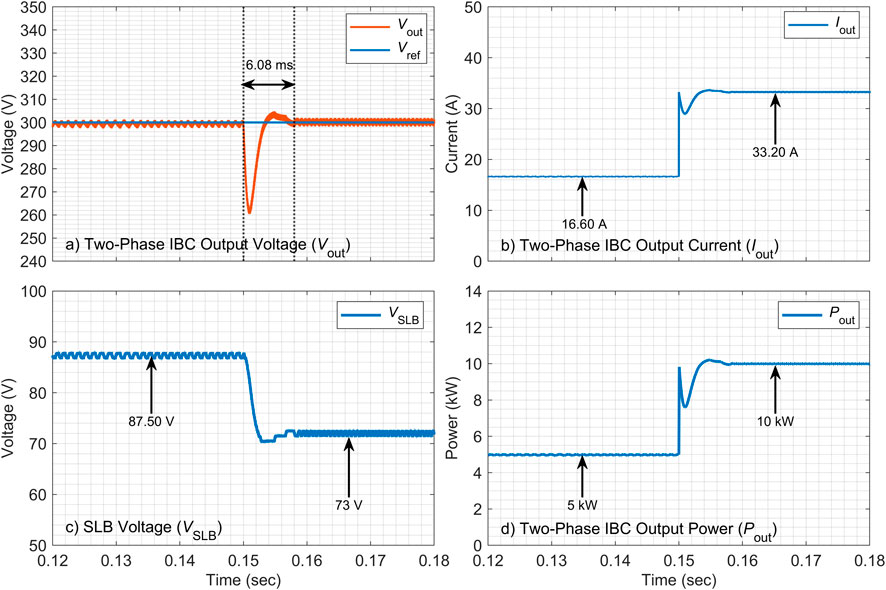
Figure 4. Two-phase IBC results during load step change using
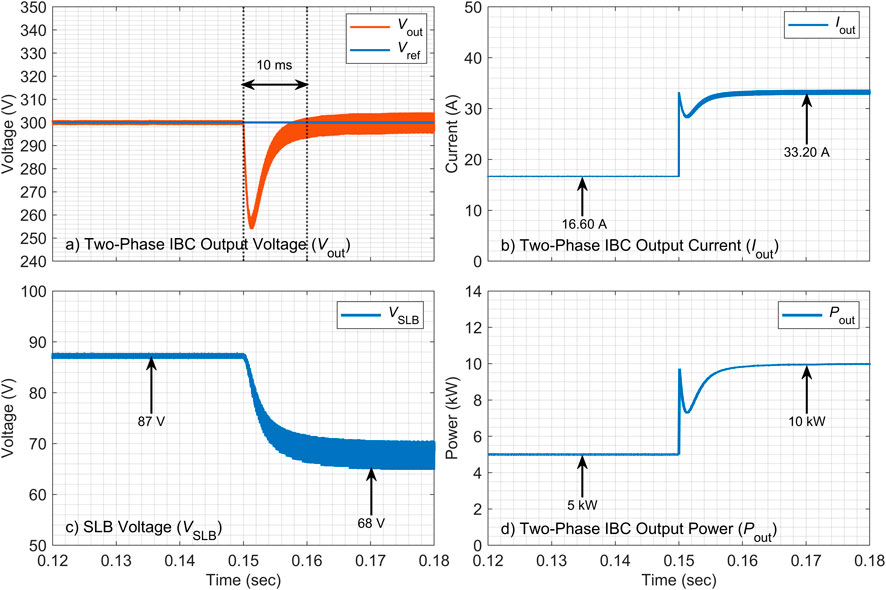
Figure 5. Two-phase IBC results during load step change using PI controller.
4.2 Comparative performance evaluation for
In this section of this paper, several parameter sensitivity tests have been performed to evaluate the robustness of the
4.2.1 + 30% inductor value change
Based on the results presented in Figure 6 of the parameter sensitivity test, a clear performance advantage of the
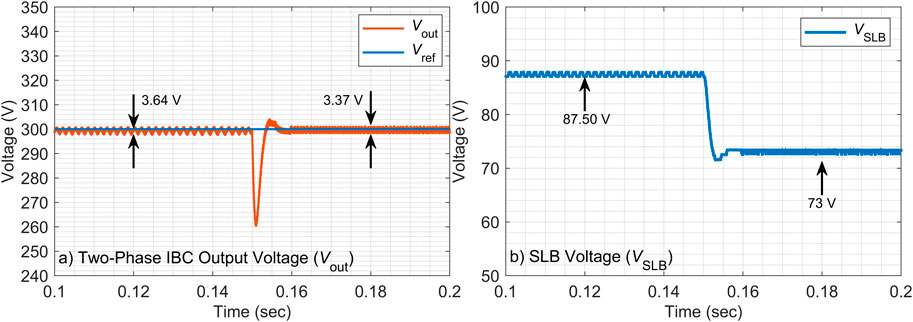
Figure 6. Two-phase IBC output voltage and SLB voltage during
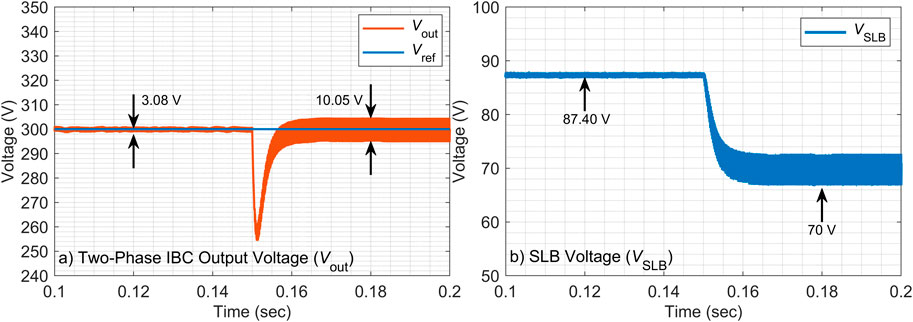
Figure 7. Two-phase IBC output voltage and SLB voltage during PI control with ∆L = +30%.
4.2.2 −30% inductor value change
The robustness of the
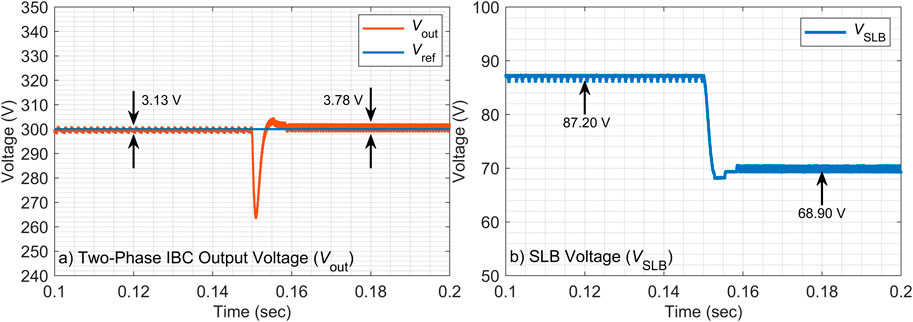
Figure 8. Two-phase IBC output voltage and SLB voltage during
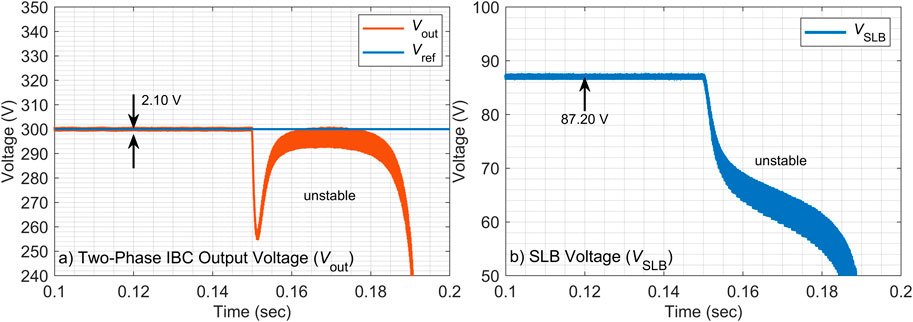
Figure 9. Two-phase IBC output voltage and SLB voltage during PI control with ∆L = −30%.
4.2.3 + 30% capacitor value change
To further evaluate the effectiveness of
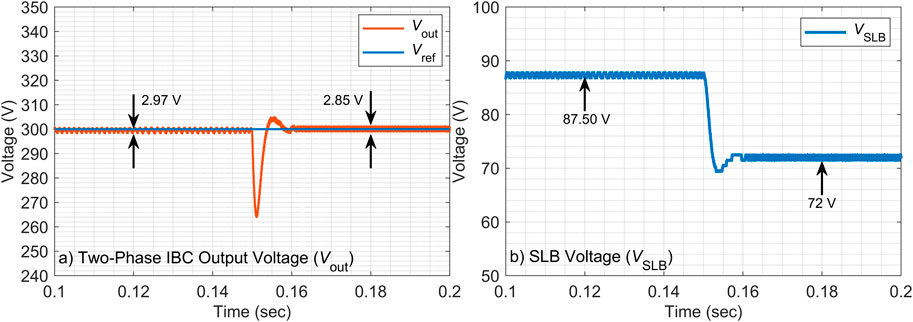
Figure 10. Two-phase IBC output voltage and SLB voltage during
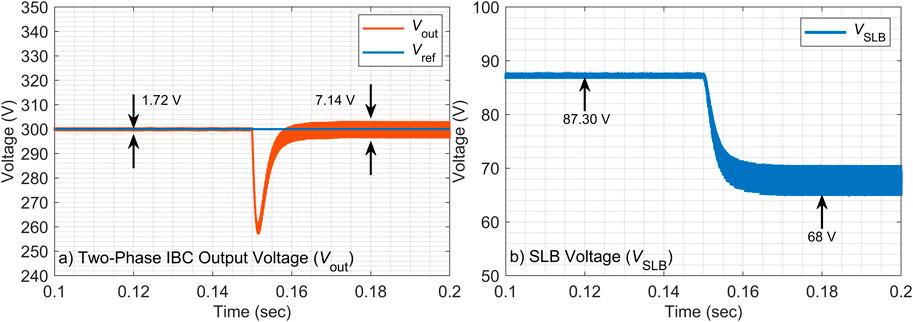
Figure 11. Two-phase IBC output voltage and SLB voltage during PI control with ∆C = +30%.
4.2.4 −30% capacitor value change
The final parameter sensitivity test involved a 30% reduction in the output capacitor value, with the results compared in Figures 12, 13. The
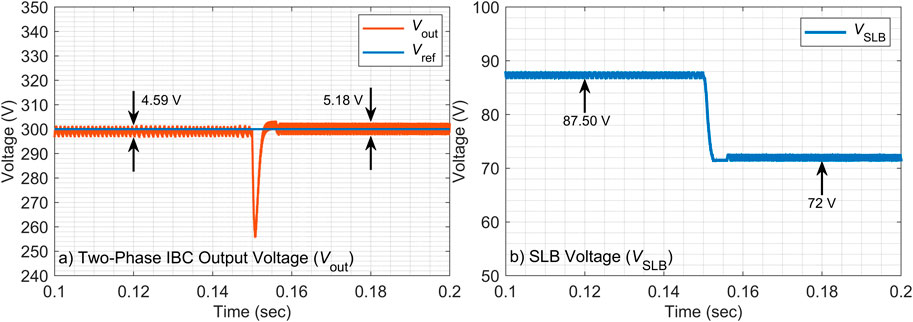
Figure 12. Two-phase IBC output voltage and SLB voltage during
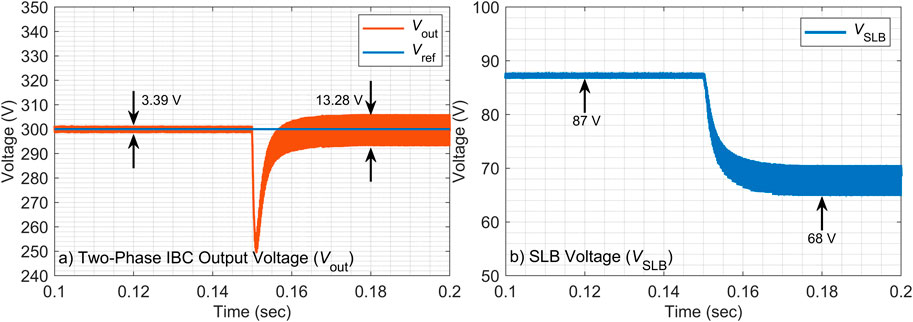
Figure 13. Two-phase IBC output voltage and SLB voltage during PI control with ∆C = −30%.
4.3 Discussions
Under nominal operating conditions, the
Overall, these quantitative comparisons, listed in Table 3, confirm that the proposed
5 Conclusion
This research successfully developed and validated a robust
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
WA: Conceptualization, Formal Analysis, Investigation, Methodology, Project administration, Software, Supervision, Validation, Visualization, Writing – original draft, Writing – review and editing. OA: Conceptualization, Funding acquisition, Methodology, Project administration, Supervision, Validation, Visualization, Writing – original draft, Writing – review and editing. SB: Conceptualization, Formal Analysis, Investigation, Methodology, Software, Validation, Visualization, Writing – review and editing.
Funding
The author(s) declare that financial support was received for the research and/or publication of this article. The authors extend their appreciation to Prince Sattam bin Abdulaziz University for funding this research work through the project number (PSAU/2023/01/27070).
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Generative AI statement
The author(s) declare that Generative AI was used in the creation of this manuscript. To improve and review English writing.
Any alternative text (alt text) provided alongside figures in this article has been generated by Frontiers with the support of artificial intelligence and reasonable efforts have been made to ensure accuracy, including review by the authors wherever possible. If you identify any issues, please contact us.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Ait, R. N., Rahoui, A., Boukais, B., Benkhoris, M. F., Ait-Ahmed, M., and Djerioui, A. (2024). Design and implementation of robust
Boukerdja, M., Chouder, A., Hassaine, L., Bouamama, B. O., Issa, W., and Louassaa, K. (2020).
Dai, Z., Liu, J., Li, K., Mai, Z., and Xue, G. (2023). Research on a modeling and control strategy for interleaved boost converters with coupled inductors. Energies 16, 3810. doi:10.3390/en16093810
Dipti, K., Siddharth, S., Renata, A., Hyung, C. K., and Annick, A. (2020). Evaluating the cost and carbon footprint of second-life electric vehicle batteries in residential and utility-level applications. Waste Manag. 113, 497–507. doi:10.1016/j.wasman.2020.05.034
Du, B., Yu, Z., Yi, S., He, Y., and Luo, Y. (2021). State-of-charge estimation for second-life lithium-ion batteries based on cell difference model and adaptive fading unscented Kalman filter algorithm. Int. J. Low-Carbon Technol. 16 (3), 927–939. doi:10.1093/ijlct/ctab019
Fazeli, A., Stadie, M., Kerner, M., Poplavskaya, K., Nagaoka, H., Kapeller, J., et al. (2021). “A techno-economic investigation for the application of second-life electric vehicle batteries for behind-the-meter services,” in Proc. IEEE Elect. Power Energy Conf., 20–27. doi:10.1109/EPEC52095.2021.9621638
Gokul, S. T., Mehdi, S., Elmira, J., Ben, H., Saad, M., and Alex, S. (2022). Role of optimization techniques in microgrid energy management systems—A review. Energy Strategy Rev. 43, 100899. doi:10.1016/j.esr.2022.100899
Gorji, S. A., Sahebi, H. G., Ektesabi, M., and Rad, A. B. (2019). Topologies and control schemes of bidirectional DC–DC power converters: an overview. IEEE Access 7, 117997–118019. doi:10.1109/ACCESS.2019.2937239
Hameed, H. Q., Hasan, F. A., and Rashad, L. J. (2025). Robust
Haram, M. H. S. M., Sarker, M. T., Ramasamy, G., and Ngu, E. E. (2023). Second life EV batteries: technical evaluation, design framework, and case analysis. IEEE Access 11, 138799–138812. doi:10.1109/ACCESS.2023.3340044
Hassanpour, N., Chub, A., Yadav, N., Blinov, A., and Vinnikov, D. (2024). High-efficiency partial power converter for integration of second-life battery energy storage systems in DC microgrids. IEEE Open J. Ind. Electron. Soc. 5, 847–860. doi:10.1109/OJIES.2024.3389466
He, G., Chen, Q., Moutis, P., Kar, S., and Whitacre, J. F. (2022). An intertemporal decision framework for electrochemical energy storage management. Nat. Energy 7, 404–412. doi:10.1038/s41560-018-0129-9
Khan, A. M., Hekmati, A., and Bagheri, M. (2025). Enhancing cost-effectiveness in residential microgrids: an optimization for energy management with proactive electric vehicle charging. Front. Energy Res. 13, 1454448. doi:10.3389/fenrg.2025.1454448
Korada, D. M. R., and Mishra, M. K. (2023). Fixed switching frequency model predictive current control for grid-connected inverter with improved dynamic and steady state performance. IEEE Access 11, 104094–104105. doi:10.1109/ACCESS.2023.3317537
Lakshmi, S. N. D., and Marimuthu, R. (2025). Distributed model predictive control strategy for microgrid frequency regulation. Energy Rep. 13, 1158–1170. doi:10.1016/j.egyr.2024.12.071
Li, Z., Xie, D., Ye, H., Li, Y., Li, J., Chen, Y., et al. (2025). Chance-constrained optimal schedule of battery energy storage considering the uncertainties of renewable generation. Front. Energy Res. 13, 1588704. doi:10.3389/fenrg.2025.1588704
Liu, Z., Jouzdani, J. E., and Eren, S. (2025). “Novel H-infinity controller for DAB converter under constant current load,” in IEEE 34th Int. Symp. Ind. Electron. (ISIE) (Toronto, Canada), 1–6. doi:10.1109/ISIE62713.2025.11124786
Luo, W., Stynski, S., Chub, A., Franquelo, L. G., Malinowski, M., and Vinnikov, D. (2021). Utility-scale energy storage systems: a comprehensive review of their applications, challenges, and future directions. IEEE Ind. Electron. Mag. 15 (4), 17–27. doi:10.1109/MIE.2020.3026169
Mandrile, F., Pastorelli, M., Musumeci, S., Urkiri, I. A., and Remirez, A. (2023). Second life management from battery storage system of electric waterborne transport applications: perspectives and solutions. IEEE Access 11, 35122–35139. doi:10.1109/ACCESS.2023.3265168
Mukherjee, N., and Strickland, D. (2015). Control of second-life hybrid battery energy storage system based on modular boost-multilevel buck converter. IEEE Trans. Ind. Electron. 62 (2), 1034–1046. doi:10.1109/TIE.2014.2341598
Mukherjee, N., and Strickland, D. (2016). Analysis and comparative study of different converter modes in modular second-life hybrid battery energy storage systems. IEEE J. Emerg. Sel. Top. Power Electron. 4 (2), 547–563. doi:10.1109/JESTPE.2015.2460334
Naim, R., Weiss, G., and Ben-Yaakov, S. (1997).
Shan, Y., Hu, J., and Guerrero, J. M. (2020). A model predictive power control method for PV and energy storage systems with voltage support capability. IEEE Trans. Smart Grid 11 (2), 1018–1029. doi:10.1109/TSG.2019.2929751
Song, H., Chen, H., Wang, Y., and Sun, X.-E. (2024). An overview about second-life battery utilization for energy storage: key challenges and solutions. Energies 17, 6163. doi:10.3390/en17236163
Wang, Y., and He, J. (2022). “Fast solution of adaptive dynamic programming for intelligent vehicle predictive controller,” in China automation congress (CAC) (Xiamen, China), 1918–1923. doi:10.1109/CAC57257.2022.10055132
Wu, L., Liu, J., Vazquez, S., and Mazumder, S. K. (2022). Sliding mode control in power converters and drives: a review. IEEE/CAA J. Autom. Sin. 9 (3), 392–406. doi:10.1109/JAS.2021.1004380
Yıldıran, N., and Tacer, E. (2019). A new approach to H-infinity control for grid-connected inverters in photovoltaic generation systems. Electr. Power Components Syst. 47, 1413–1422. doi:10.1080/15325008.2019.1689445
Zhang, Y., Wei, D., Luo, F., Deng, Y., Qiu, J., and Dong, Z. Y. (2023a). Two-stage capacity determination framework for residential second-life BESSs considering cloud energy storage service. IEEE Syst. J. 17 (3), 4737–4747. doi:10.1109/JSYST.2022.3232732
Zhang, X., Zhao, Y., Jiang, H., and Wei, M. (2023b). Design of integral sliding mode control and fuzzy adaptive PI control for voltage stability in DC microgrid. Front. Energy Res. 11, 1278305. doi:10.3389/fenrg.2023.1278305
Zhao, Y., Li, H., Wan, C., Du, D., and Chen, B. (2025). Microgrid energy management considering energy storage degradation cost. Batteries 11, 169. doi:10.3390/batteries11050169
Keywords: interleaved boost converter (IBC), second-life battery (SLB), energy storage system (ESS), grid integration, H-infinity control
Citation: Alhosaini W, Aldosari O and Batiyah S (2025) Robust H-infinity control of a two-phase interleaved boost converter for second-life battery integration in battery energy storage systems. Front. Energy Res. 13:1689813. doi: 10.3389/fenrg.2025.1689813
Received: 20 August 2025; Accepted: 30 September 2025;
Published: 10 November 2025.
Edited by:
Shuang Zhao, Hefei University of Technology, ChinaReviewed by:
Mahmood Saadeh, The Hashemite University, JordanMed Darwish, Brunel University London, United Kingdom
Copyright © 2025 Alhosaini, Aldosari and Batiyah. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Obaid Aldosari, b20uYWxkb3NhcmlAcHNhdS5lZHUuc2E=