 Romain Maure
Romain Maure Barbara Bruno
Barbara Bruno- Socially Assistive Robotics with Artificial Intelligence Lab, Karlsruhe Institute of Technology, Karlsruhe, Germany
Socially assistive robots are increasingly being researched and deployed in various domains such as education, healthcare, service, and even as collaborators in a variety of other workplaces. Similarly, SARs are also expected to interact in a socially acceptable manner with a wide audience, ranging from preschool children to the elderly. This diversity of application domains and target populations raises technical and social challenges that are yet to be overcome. While earlier works relied on the Wizard-of-Oz (WoZ) paradigm to give an illusion of interactivity and intelligence, a transition toward more autonomous robots can be observed. In this article, we present a systematic review, following the PRISMA method, of the last 5 years of Socially Assistive Robotics research, centered around SARs’ level of autonomy with a stronger focus on fully and semi-autonomous robots than non-autonomous ones. Specifically, to analyse SARs’ level of autonomy, the review identifies which sensing and actuation capabilities of SARs are typically automated and which ones are not, and how these capabilities are automated, with the aim of identifying potential gaps to be explored in future research. The review further explores whether SARs’ level of autonomy and capabilities are transparently communicated to the diverse target audiences above described and discusses the potential benefits and drawbacks of such transparency. Finally, with the aim of providing a more holistic view of SARs’ characteristics and application domains, the review also reports the embodiment and commonly envisioned role of SARs, as well as their interventions’ size, length and environment.
1 Introduction
Socially Assistive Robotics (SAR) describes a class of robots that stand at the intersection of assistive robotics, which includes robots that provide assistance to a user, and socially interactive robotics, which includes robots that communicate with a user through social interaction (Feil-Seifer and Matarić, 2011). As assistive robots, SARs’ core function is to provide assistance in a variety of domains ranging from education to health or tasks requiring collaborative teamwork (Breazeal et al., 2016). As social robots, SARs are expected to interact in a natural manner with people of different ages, expertise and cultures (Breazeal et al., 2016). To successfully interact with and properly assist users, SARs require to be equipped with appropriate interaction and actuation capabilities. Similarly, SARs also need to be equipped with sensing capabilities to be able to sense their environment and react appropriately to humans’ inputs and actions. Creating social robots that are competent and capable assistants for people raises technical challenges that are yet to be overcome (Breazeal et al., 2016). As a result of these challenges, many SAR applications rely on the Wizard-of-Oz (WoZ) paradigm, which refers to a person (usually the experimenter and often hidden to the target user) remotely operating a robot and controlling some or all of the robot’s sensing and actuation capabilities, such as its vision, hearing, navigation, speech, gestures, etc (Riek, 2012). WoZ may involve any amount of control along the autonomy spectrum, from full autonomy to full human control (or no autonomy), with human-robot shared autonomy (or semi-autonomy) anywhere in between (Riek, 2012). While technical challenges are often a motivation to choose no or shared autonomy over full autonomy, other factors can also enter into consideration. For example, when robots are used for highly critical tasks that have potential for human safety concerns, less autonomous robots can be preferred (Elbeleidy et al., 2022). Similarly, when robots are used in tasks which require a clear chain of accountability, less autonomous robots can also be recommended so that blame can be appropriately attributed (Elbeleidy et al., 2022). Finally, teleoperation can also be preferred in applications in which the operator is the target user itself and operating the robot is part of the SAR intervention. Although WoZ has advantages and is a convenient tool for human-robot interaction (HRI) researchers, many raise concerns about this technique. For example, Clabaugh and Matarić (2019) consider WoZ methods intractable in SAR domains that require long-term and real-world interventions. As described in Riek (2012), many researchers argue that WoZ has methodological flaws, to the point of stating that there is no real human-robot interaction when using this technique, but rather a human-human interaction through the proxy of a robot. Additionally, Riek (2012) also mentions that researchers are concerned about the ethical flaws of this method, both for the target user, who is subject to deception, and for the operator, who is required to perform deception.
The above discussion highlights how the topic of autonomy in SARs is as old as SARs themselves, and still far from being solved. Indeed, we identified three reviews that explore the relation between SARs and their level of autonomy (LoA).
Clabaugh and Matarić (2019) focus exclusively on fully autonomous robots and explore how full autonomy is achieved. They analyse full autonomy along two dimensions. The first dimension corresponds to the interaction complexity, which is defined by the intervention’s group size and length, as well as the robot’s embodiment and role. The second dimension corresponds to the computational complexity and intelligence of the SAR system, which is defined by the environment’s observability and discreteness, as well as the number of percepts (i.e., sensing modalities) and the level of reasoning of the robot system employed. Riek (2012) focuses solely on studies using the WoZ paradigm (non- and semi-autonomous robots). The review explores how the WoZ technique is typically employed in HRI by classifying studies using criteria proposed by different authors (Fraser and Gilbert, 1991; Green et al., 2004; Steinfeld et al., 2009; Kelley, 1984). These criteria evaluate, for example, the type of WoZ model used (Wizard of Oz, Wizard with Oz, Wizard and Oz, Oz with Wizard, Oz of Wizard, Wizard nor Oz) (Steinfeld et al., 2009), the possibility to simulate the system in an autonomous way in the future (Fraser and Gilbert, 1991), the necessity of providing training to wizards (Fraser and Gilbert, 1991), whether instructions were given to the target users to specify what they could do during the interaction (Green et al., 2004), whether the use of the WoZ technique is part of an iterative design process or not (Kelley, 1984), etc. Finally, Elbeleidy et al. (2022) explores the whole spectrum of autonomy (from non-autonomous to fully autonomous). The authors use Beer et al. (2014)’s definition of autonomy: “The extent to which a robot can sense its environment, plan based on that environment, and act upon that environment with the intent of reaching some task-specific goal without external control.” Using this definition, they compare researchers’ choices of robot’s level of autonomy with frameworks providing guidelines on how to select a robot’s level of autonomy in accordance to the type of intervention and users (Beer et al., 2014), and suggest that there is a mismatch between the two. They also demonstrate that researchers rarely provide a rationale concerning their choice for the robot’s level of autonomy. While Elbeleidy et al. (2022) shed light on an interesting gap in the literature, they only consider the overall level of autonomy of social robots, with no insights on the underlying technologies, unlike the reviews of Clabaugh and Matarić (2019) and Riek (2012).
In the present review, we employ the same search pattern as the one used by Clabaugh and Matarić (2019) (further described in Section 2). By doing so, we aim to skew our research towards publications whose SAR systems presents some degree of autonomy, with the overarching goal of understanding how and through which means autonomy is achieved in HRI. As opposed to the review of Clabaugh and Matarić (2019), however, we do not exclude semi- and non-autonomous SAR works that would result from the search. By doing so, we aim to understand which sensing and actuation capabilities are typically automated, and which ones are not, and attempt to provide insights concerning the choice of robots’ level of autonomy at the functionality level, thus potentially gaping the lack of researcher’s rationale identified by Elbeleidy et al. (2022). It should be noted that, while the search pattern allows to identify publications whose SAR system presents some degree of autonomy (as stated by Clabaugh and Matarić (2019): “The terms in the query only enforce that a paper includes some form of social HRI and ML or AI for automation”), the search pattern does not allow to provide a comprehensive view of non-autonomous SARs. To summarize, this article contributes to the current state of research in Socially Assistive Robotics by providing an up-to-date systematic review focusing on the level of autonomy employed in SAR applications. We report the robots’ embodiment and commonly envisioned role, as well as the interventions’ size, length and environments of SARs. We study autonomy by analysing which sensing and actuation capabilities of social robots are typically automated, and which ones are not, and how these capabilities are automated. Finally, we also study the level of transparency concerning robots’ autonomy and capabilities.
The article is structured as follows. First, we present the methodology of the survey in Section 2. Following the coding scheme introduced in the survey methodology, we analyse the included publications in Section 3 and discuss the insights emerging from the analysis in Section 4. Finally, we conclude and provide opportunities for future research in Section 5.
2 Materials and methods
2.1 Identification, screening and selection of relevant publications
The present study is a systematic review following the PRISMA approach (Page et al., 2021). We used Google Scholar to identify records and limited the search over the last 5 years (from January 2019 to July 2023). We limited our search to the same venues as the ones indicated in Clabaugh and Matarić (2019): the International Conference on Human-Robot Interaction (HRI), the International Conference on Robot and Human Interactive Communication (RO-MAN), the Conference on Human Factors in Computing Systems (CHI), the Interaction Design and Children Conference (IDC), the International Conference on Robotics and Automation (ICRA), the International Conference on Intelligent Robots and Systems (IROS), the Robotics: Science and Systems conference (RSS), the International Conference on Development and Learning and Epigenetic Robotics (ICDL-EpiRob), the Conference on Robot Learning (CoRL), the AAAI Conference on Artificial Intelligence (AAAI), the International Conference on Multimodal Interaction (ICMI), the International Conference on Machine Learning (ICML), and the Conference on Neural Information Processing Systems (NeurIPS). Similarly, and as indicated in Section 1, we used the same search pattern as the one used by Clabaugh and Matarić (2019):
(social OR sociable OR socially) AND (“machine learning” OR “artificial intelligence”) AND “human-robot interaction.”
The search returned 1,138 records. Among them, 10 were identified as duplicates and removed and 37 were removed because they were published at venues excluded from our search. Among the 1,091 remaining reports, one could not be retrieved because it was not correctly referenced anymore, leaving 1,090 articles to be assessed for eligibility. We excluded 51 reports for being meta-analyses. Specifically, these articles do not present a primary study but rather focus on synthesizing, comparing and discussing the work described in other studies. Similarly, we further excluded 185 reports due to their type. These articles are workshop papers, extended abstracts, student competition papers, video demonstration papers, position papers, summaries of a person’s work (e.g., full PhD theses) or project plans. Lastly, we excluded 784 reports as out-of-scope for this review. In particular, an article was considered out-of-scope if it fell in one of the following cases:
1. The work lacks a clear socially assistive application.
2. The work lacks details about the robot’s approach to sensing and acting.
3. The work was covered and expanded on in a subsequent publication.
4. The work lacks a human-robot interaction:
a. There is no interaction between a human and a robot.
b. Human participants only interact with a virtual robot (AR/VR or agent on a display).
c. Human participants only interact with a physical robot in an online format (videoconference).
d. Human participants only watch a video of a pre-recorded human-robot interaction.
In the end, 70 studies were included in the review. Figure 1 summarizes the flow of information through the stages of identification, screening, and inclusion. Figure 2 presents the distribution of publications by venue and by year. Please notice that the low number of publications in 2023 is partly due to the fact that this review only considers articles published in the first half of 2023.
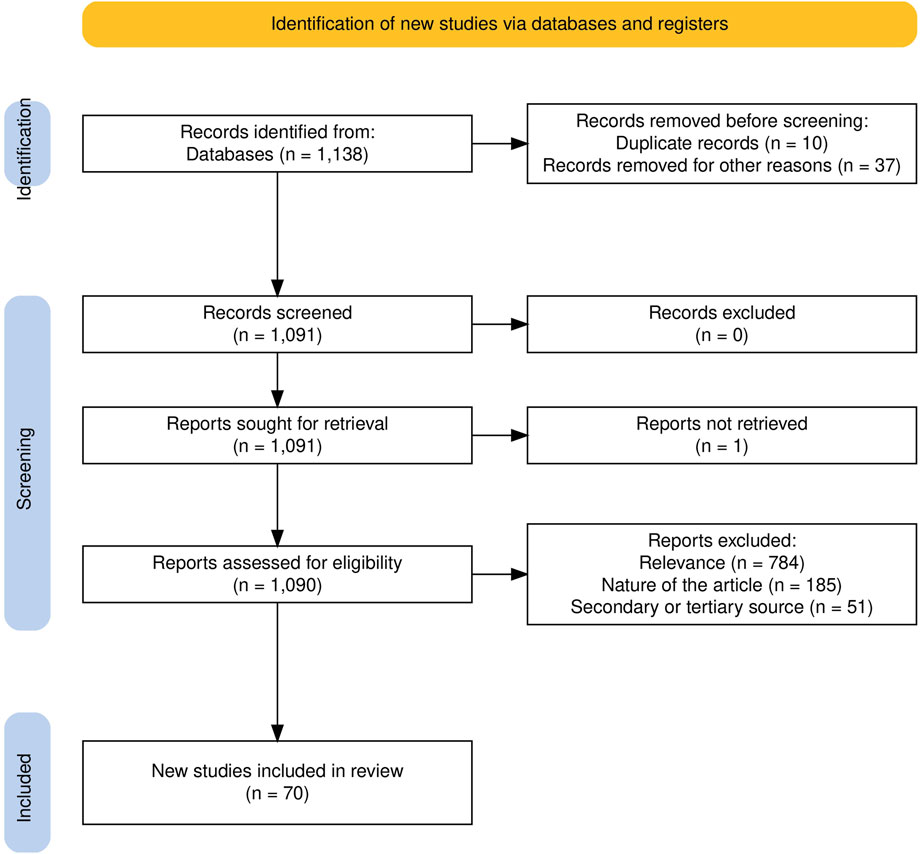
Figure 1. PRISMA flow diagram for the stages of identification, screening and inclusion.
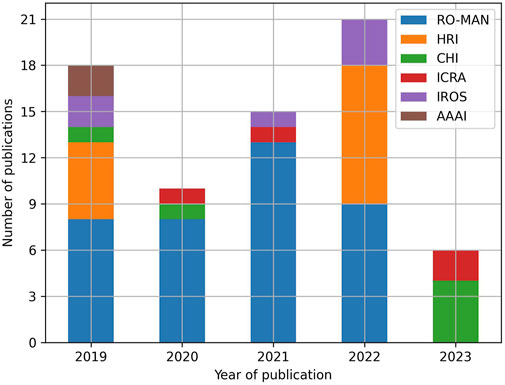
Figure 2. Number of publications by venue and by year.
2.2 Coding of the included publications
After the stages of identification, screening and selection of relevant publications, we coded each of the included 70 publications using the coding scheme1 described below. As introduced in Section 1, and to the best of our knowledge, there is currently no unique and standardized way of evaluating SAR autonomy. The coding scheme of the present review is partially inspired by the coding scheme described in Clabaugh and Matarić (2019). However, since we do not only consider fully autonomous systems, as done in Clabaugh and Matarić (2019), but also non- and semi-autonomous systems, some elements of Clabaugh and Matarić (2019)’s coding scheme were adapted or discarded, while new elements were added, to fit our specific goals and research interests.
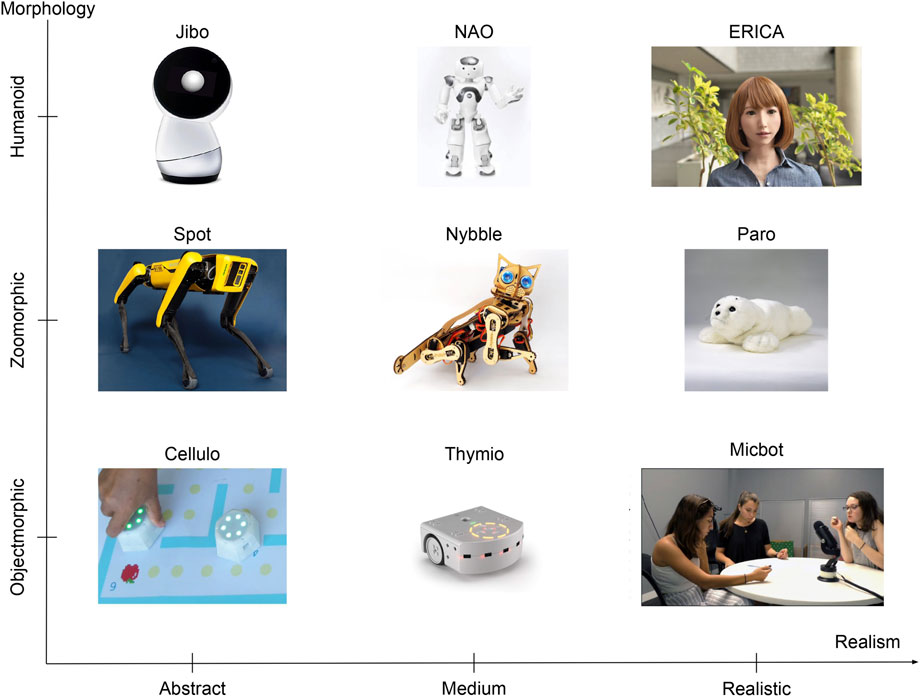
Figure 3. Classification of robots based on their morphology and their realism. The Micbot image is taken from (Tennent et al., 2019).
3 Results
3.1 Fields of application
Concerning the fields of application of SARs, 44.3% of the publications included in this review focus on the health domain, while 27.1% employ social robots for applications related to the field of education, and 28.6% explore the use of social robots in the workplace (Figure 4). Among the health domain, the applications are diverse: helping individuals with ASD (Ramnauth et al., 2022; Carpio et al., 2019; Hijaz et al., 2021), visual impairment (Antunes et al., 2022; Kayukawa et al., 2023) or auditory impairment (Uluer et al., 2020; Chang et al., 2022), promoting physical activity (Kothig et al., 2021; Cooney et al., 2020; Salomons et al., 2022b; Cao et al., 2022; Li X. et al., 2023) or mental wellbeing (Farrall et al., 2023; Dino et al., 2019; Zhang et al., 2023), providing assistance on feeding (Gallenberger et al., 2019; Shaikewitz et al., 2023) or body hygiene (Palinko et al., 2021; Unnikrishnan et al., 2019; Ye et al., 2022), delivering services in clinical environments (Odabasi et al., 2022; Horn et al., 2022) or acting as a telepresence device for caregivers (Fiorini et al., 2020) or patients (Mackey et al., 2022; Wang et al., 2021). In the field of education, the disciplines of science, technology, engineering and mathematics (STEM) are the most commonly considered (Nasir et al., 2019; Donnermann et al., 2020; Ramachandran et al., 2019; Charisi et al., 2021), followed by language learning (Vogt et al., 2019; Kim et al., 2019), storytelling (Zhao and McEwen, 2022; Park et al., 2019), and motor development (Tozadore et al., 2022; Kouvoutsakis et al., 2022), among others. Finally, similarly to the health domain, the use of SARs in the workplace is represented by a variety of scenarios, including as receptionists (Mishra et al., 2019; Hwang et al., 2020; Gunson et al., 2022), waiters (McQuillin et al., 2022; Naik et al., 2021), tour-guides (Del Duchetto et al., 2019; Cauchard et al., 2019), assembly workers (Rajavenkatanarayanan et al., 2020; Lambrecht and Nimpsch, 2019), service providers in retail environments (Takada et al., 2021; Lewandowski et al., 2020), cooking assistants (Yamamoto et al., 2021) or video recording assistants (Li J. et al., 2023).

Figure 4. Proportion of publications per field of application and level of autonomy.
3.2 Populations
Concerning the populations recruited to test the robotics applications (Figure 5), the most represented age categories are the early adulthood (Salomons et al., 2022b; Donnermann et al., 2020) and adulthood categories (Kayukawa et al., 2023; Takada et al., 2021), which are included in respectively 37.1% and 47.1% of the publications analysed in this review. The widespread presence of these age categories is likely explained by the ease to recruit and conduct experiments with such populations. Following these categories, the preschool (Vogt et al., 2019; Tolksdorf and Rohlfing, 2020), school age (Antunes et al., 2022; Kim et al., 2019) and adolescence (Azizi et al., 2022; Nasir et al., 2019) are included in respectively 15.7%, 22.9% and 18.6% of the publications. Most of these age categories are represented by the education domain. Finally, the least represented populations, which are also the most vulnerable, are the elderly (Luperto et al., 2019; Fiorini et al., 2020), early childhood (Zhao and McEwen, 2022) and infancy populations (Kouvoutsakis et al., 2022), which are present in respectively 11.4%, 1.4% and 1.4% of the studies. In a Kendall’s tau-b correlation analysis investigating the relationship between the age of the populations (excluding the unspecified category) and their representation in the publications included in this review, a strong and nearly statistically significant positive correlation was observed,
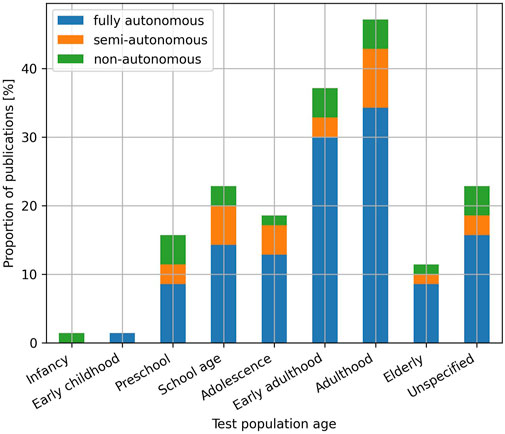
Figure 5. Proportion of publications per age category and level of autonomy. Please notice that a publication can fall into multiple age categories, as explained in Section 2.2.
3.3 Robots used
Concerning the robots used in the studies, NAO, Pepper (Pandey and Gelin, 2018), QTRobot and Jibo are the most commonly employed and represent respectively 14.3%, 10%, 5.7% and 2.9% of the publications (Figure 6A). Various robotic arms such as UR5, KUKA LBR iiwa or FRANKA EMIKA PANDA are also used and collectively account for 14.3% of the publications (Salomons et al., 2022a; Li J. et al., 2023; Ye et al., 2022; Kowalski et al., 2022). The figure also shows that the majority of the studies are conducted with a plethora of diverse robots (52.9%), some being commercially available such as Turtlebot, Double or TIAGo, while some are ad hoc designed, such as Micbot (Tennent et al., 2019), POP Cart (Takada et al., 2021), RIMEPHAS (Palinko et al., 2021) or Cobbie (Lin et al., 2020).

Figure 6. (A) Proportion of the robots used in the studies included in the review. (B) Proportion of publications per robot morphology and level of autonomy. (C) Proportion of publications per robot realism and level of autonomy. (D) Proportion of publications per robot role and level of autonomy.
Most of the robots used have a humanoid morphology (75.7%), while objectmorphic robots represent 21.4% of the publications and zoomorphic robots only represent 2.9% of the publications (Figure 6B). Objectmorphic robots take various forms: a suitcase (Kayukawa et al., 2023), a backpack (Cao et al., 2022), a microphone (Tennent et al., 2019), a wheeled vehicule (Domínguez-Vidal et al., 2021) or a drone (Cauchard et al., 2019), among others. Zoomorphic robots are only employed in two studies: one uses the Luka robot (owl-shaped robot) in a storytelling activity for children (Zhao and McEwen, 2022), while the other used the Keepon robot (canary-shaped robot) in an interaction promoting physical activity in early adulthood individuals (Salomons et al., 2022b).
Most robots present a low (40%) to medium (48.6%) level of realism, while realistic robots are less represented and account for 11.4% of the publications (Figure 6C). Nearly all the realistic robots are objectmorphic (87.5%) and only one publication employs a realistic humanoid robot [Nadine, a robot designed to resemble a middle-aged Caucasian woman, employed in Mishra et al. (2019)].
Concerning the robot’s role, the corpus of publications studied in this review is characterized by a majority of robots acting as a peer (50%) while the subordinate and superior/tutor roles account for 27.1% and 18.6% of the publications respectively (Figure 6D).
3.4 Intervention types
Concerning the type of intervention (Figure 7A), the vast majority of studies are dyadic (80%). Publications characterized by a triadic (Zhang et al., 2023; Kowalski et al., 2022; Charisi et al., 2021), small group (Unnikrishnan et al., 2019; Humblot-Renaux et al., 2021; Tennent et al., 2019) or large group (Velentza et al., 2021; Sackl et al., 2022) interaction sizes represent 10%, 4.3% and 5.7% respectively. No publication using a medium group intervention size is recorded. In a Kendall’s tau-b correlation analysis investigating the relationship between the interaction’s size and their representation in the publications included in this review, a strong but not statistically significant negative correlation was observed,
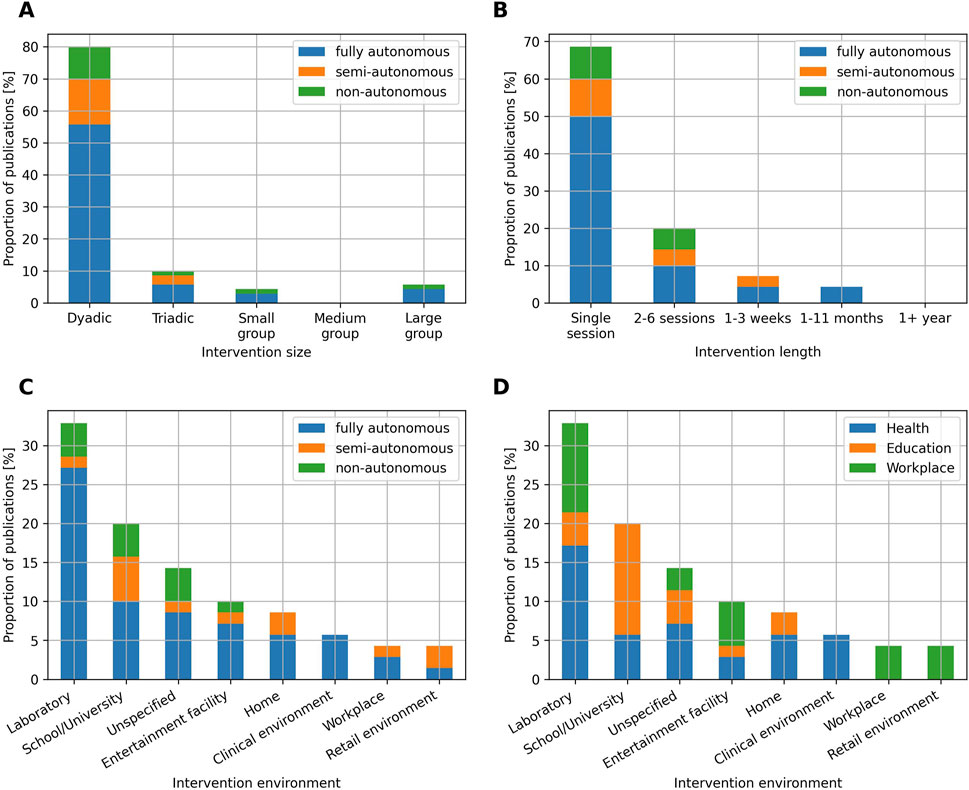
Figure 7. (A) Proportion of publications per intervention size and level of autonomy. (B) Proportion of publications per intervention length and level of autonomy. (C) Proportion of publications per intervention environment and level of autonomy. (D) Proportion of publications per intervention environment and field of application.
Most of the interactions involve only a single session (68.6%), while studies lasting 2 to 6 sessions (Chen et al., 2022; Ramachandran et al., 2019; Rajavenkatanarayanan et al., 2020), 1–3 weeks (Ramnauth et al., 2022; Mizumaru et al., 2019; Dino et al., 2019) and 1–11 months (Zhao and McEwen, 2022; Park et al., 2019; Del Duchetto et al., 2019) represent 20%, 7.1% and 4.3% respectively. No publication lasting more than 1 year is recorded (Figure 7B). In a Kendall’s tau-b correlation analysis investigating the relationship between the interaction’s length and their representation in the publications included in this review, a perfect and statistically significant negative correlation was observed,
Concerning the intervention environment (Figure 7C), 32.9% of the studies are conducted in a laboratory setting, while 52.9% are conducted in-the-wild, and 14.2% of the publications do not report the intervention location. The interventions performed in the real world are various: 20% of the studies are conducted in schools or universities (Kim et al., 2019; Nasir et al., 2019; Velentza et al., 2021; Charisi et al., 2021), 10% are conducted in entertainment facilities such as gym rooms (Sackl et al., 2022), museums (Del Duchetto et al., 2019; Kayukawa et al., 2023) or science festivals (Koenig et al., 2021), 8.6% are conducted at home (Ramnauth et al., 2022; Fiorini et al., 2020), 5.7% are conducted in clinical environments such as hospitals (Palinko et al., 2021), rehabilitation centres (Horn et al., 2022) or retirement homes (Odabasi et al., 2022), 4.3% are conducted in retail environments such as supermarkets (Takada et al., 2021; Lewandowski et al., 2020) or shopping malls (Mizumaru et al., 2019) and 4.3% are conducted in workplace environments such as insurance companies (Mishra et al., 2019), hotels (Nakanishi et al., 2021), etc. Additionally, we observe differences between the fields of applications concerning the proportion of studies conducted in the wild with respect to studies conducted in controlled-laboratory settings (Figure 7D). Education is the domain that is most tested in-the-wild, with 81.2% of the publications. On the other hand, applications related to the health and workplace domains are tested in-the-wild in 53.9% and 55.6% of the cases, respectively.
3.5 Levels of autonomy
Using our search pattern, which mainly targets publications whose SAR system present some degree of autonomy, and following our coding scheme, we obtained the following distribution of level of autonomy: 68.6% of the publications employed robots able to conduct the intervention in a fully autonomous manner, 17.1% employed semi-autonomous robots, and 14.3% employed non-autonomous robots (Figure 8). We conducted statistical tests of association between the level of autonomy and the field of application, the robot’s morphology, the robot’s realism, the robot’s role, the intervention’s size, the intervention’s length and the intervention’s environment. Due to one of the assumptions of the Chi-squared test not being satisfied (expected values above five in at least 80% of the cells of the contingency table) for all these sets of variables, we used the Fisher’s exact test instead. However, due to the nature of this literature review, the row and column totals of the contingency tables could not be fixed, which is one of the assumptions of Fisher’s exact test. As a result, the tests we conducted can not be referred as exact anymore and their power is reduced. We still favoured Fisher’s exact test over alternatives such as Barnard’s test or Boschloo’s test due to the lack of available and tested software implementations (both in R and Python) of these alternative tests for more than two by two contingency tables. Note that we did not conduct a test of association between the level of autonomy and the users’ age, because each publication could fall into multiple age categories, as explained in Section 2.2. As a result, the observations are not mutually exclusive, which is another assumption of the Fisher’s exact test of association. The results of the tests we conducted are summarized in Table 1. For all the variables studied, no statistically significant associations were found

Figure 8. Proportion of publications per level of autonomy.
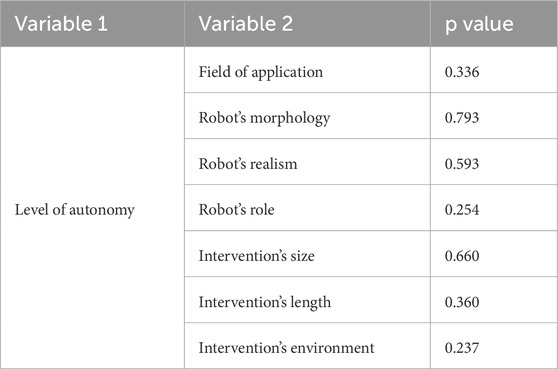
Table 1. Fisher’s exact test statistics (two-tailed).
3.5.1 Sensing
Concerning the sensing modalities (Figure 9), vision is the most prominent and is used in 72.9% of the publications. In 48.6% of the publications, the vision modality is handled fully autonomously by the robot system, while it is handled by a human in 24.3% of the publications. Publications using vision in a fully autonomous manner typically use the internal camera of the robot or external devices such as Intel RealSense or Kinect cameras. Some publications also use Lidars and laser scanners. Vision is used in a variety of ways, for example, Palinko et al. (2021); Ramnauth et al. (2022); Tozadore et al. (2022) use face/body detection to trigger specific behaviours when humans enter the robot’s field of view, Kayukawa et al. (2023); Odabasi et al. (2022) use vision to perform socially-aware navigation in real-world environments, Sackl et al. (2022); Cooney et al. (2020); Salomons et al. (2022b) use body pose estimation to provide feedback to humans during physical activities, McQuillin et al. (2022); Park et al. (2019) use vision to perform facial expression recognition, Gallenberger et al. (2019); Shaikewitz et al. (2023); Lambrecht and Nimpsch (2019) use the eye-in-hand paradigm to allow robotic arms to detect and grasp objects in their reachable workspace. This sensing modality is used for similar purposes when it is handled by humans, for example, Unnikrishnan et al. (2019); Mizumaru et al. (2019) use vision to trigger specific robot behaviours when humans enter the scene, Fiorini et al. (2020); Kouvoutsakis et al. (2022); Yadollahi et al. (2022); Gunson et al. (2022) use vision to navigate the robot in its environment, while Koenig et al. (2021) use vision to perform grasping operations.
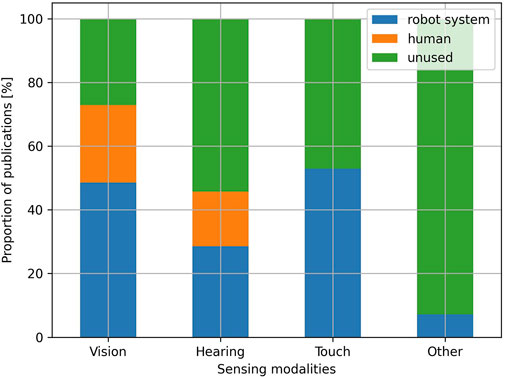
Figure 9. Proportion of publications per sensing modality and actor handling the modalities.
Hearing is used to a lesser extent than vision and is present in 45.7% of the publications, with 28.6% letting hearing being handled by the robot system, and 17.1% by a human. Some publications included in this review justify not using the hearing modality with the inaccuracies of the available speech recognition solutions (Vogt et al., 2019; Donnermann et al., 2020; Tolksdorf and Rohlfing, 2020). In the cases where hearing is implemented in an autonomous manner, the internal robot microphone is typically used. External microphones such as the Amazon Echo Dot, the ReSpeaker 4-microphone array or the microphones present in Kinect devices are also used. The hearing modality is used with varying levels of complexity, for example, Ramnauth et al. (2022) uses voice activity detection: the behaviour of the robot changes according to the presence or absence of an answer from the human user, but the content of the user’s answer, if given, has no influence on the interaction. Most of the other publications adapt the interaction based on the content of the user’s answers. While some only accept a limited set of answers such as basic affirmations or negations like “yes,” “understood,” “no” (Palinko et al., 2021; Luperto et al., 2019), or basic commands like “next,” “start,” “stop,” “help” (Cooney et al., 2020; Yamamoto et al., 2021; Lambrecht and Nimpsch, 2019), others combine speech recognition with more advanced natural language understanding and dialogue management solutions (Kraus et al., 2022; Horn et al., 2022; Dino et al., 2019; Mishra et al., 2019). Finally, only a few studies extract features from the raw audio signals. For example, in Carpio et al. (2019), the robot extracts the spectrogram of the user’s audio signals and uses this information to select appropriate actions in the context of an intervention for individuals with ASD. Similarly, in Humblot-Renaux et al. (2021), the robot extracts the users’ spectrograms and gammatonegrams to perform speaker recognition. Alongside speaker recognition, they also use an array of microphones to perform sound localization, allowing the robot to align toward the current human interlocutor. Sound localization is also used in Tennent et al. (2019) to allow the robot to align toward the interlocutor who talked the least in a group. When hearing is handled by human operators, it is essentially used to perform perfect speech recognition, which is then used to react appropriately to the target user’s prompts and control the flow of the interaction. Unlike vision, where autonomous solutions seem capable to handle the same tasks occasionally delegated to humans, with comparable accuracy, automated hearing solutions seem still far from human performance, particularly in the case of speech recognition.
The touch modality is present in 52.9% of the publications, and is always handled autonomously by the robot. In most cases, this modality is employed through the use of tablets, which are often external to the robot (Apple or Android based tablets, Microsoft Surface, Wacom tablets, etc.). For example, in Vogt et al. (2019) a Microsoft Surface tablet is used as the main support for a language learning activity with children, in Kim et al. (2019) children practice handwriting on a Wacom tablet, in Kraus et al. (2022) an Android-based tablet is used to give tasks to a home assistant robot. The touch modality is also characterized by the use of force sensors, mainly by robotic arms performing grasping tasks (Gallenberger et al., 2019; Shaikewitz et al., 2023), or the use of buttons, which are often used as a way to communicate with the robot (Ramnauth et al., 2022; Kayukawa et al., 2023), or as emergency stop buttons (Odabasi et al., 2022; Dennler et al., 2021).
Finally, 7.1% of the publications used other sensing modalities. Among them, inertial sensing (Zhao and McEwen, 2022; Mizumaru et al., 2019) and heart rate/ECG sensing (Kothig et al., 2021; Farrall et al., 2023) are the most common. In Zhao and McEwen (2022), the robot possesses an inertial measurement unit (IMU) which allows detecting the child’s manipulation of the robot and triggering specific robot behaviours. In Mizumaru et al. (2019), the robot collects IMU data to perform Simultaneous Localization And Mapping (SLAM) and navigate in its environment. In Kothig et al. (2021), the heart rate of the participant is measured to adapt in real-time the difficulty of cardiovascular exercises. In Farrall et al. (2023), the heart rate of the participant is measured and is replicated on a shape-changing pneumatic sphere used for relaxation and anxiety reduction.
3.5.2 Actuation
Concerning the actuation modalities (Figure 10), robot movements are the most employed and appear in 91.4% of the publications. The embodiment of robots, which is the main difference between robots and virtual agents, is thus mostly leveraged by HRI researchers. In 67.1% of the publications, the movements are handled fully autonomously by the robot system, while they are handled by a human operator in 24.3% of the publications. In the case of fully autonomous robots, movements are used in a variety of ways, for example, Kayukawa et al. (2023); Kraus et al. (2022); Odabasi et al. (2022); Del Duchetto et al. (2019) use it to navigate in the environment, Gallenberger et al. (2019); Shaikewitz et al. (2023); Salomons et al. (2022a); Lambrecht and Nimpsch (2019) use it to perform grasping and hand-over tasks, Rossi et al. (2019); Park et al. (2019) use arm and body gestures to make the robot’s emotions more expressive and realistic, Tozadore et al. (2022); Uluer et al. (2020); Dennler et al. (2021) use arm gestures to provide positive or negative feedback during child-robot interactions, Cooney et al. (2020); Kothig et al. (2021); Salomons et al. (2022b) use arm and body gestures to motivate and guide users in physical exercise interventions, Mishra et al. (2019); Nakanishi et al. (2021); Tennent et al. (2019); Humblot-Renaux et al. (2021) use it to align the robot’s head or body toward the user. Robot movements are used for similar purposes when handled by humans: in Fiorini et al. (2020); Kouvoutsakis et al. (2022); Takada et al. (2021); Nasir et al. (2019), the operators control the robots’ movements to make them navigate in the environment, in Koenig et al. (2021) the user operates the robot to perform grasping tasks, in Tolksdorf and Rohlfing (2020) a researcher operates the robot to perform pointing gestures, in Hijaz et al. (2021) a caregiver operator controls the robot’s gestures to make the robot’s emotions more expressive, in Azizi et al. (2022); Velentza et al. (2021), gestures are used to make the robot appear more lively and to complement other actuation modalities, in Tolksdorf and Rohlfing (2020) the operator controls the robot’s head to align it toward the target user.
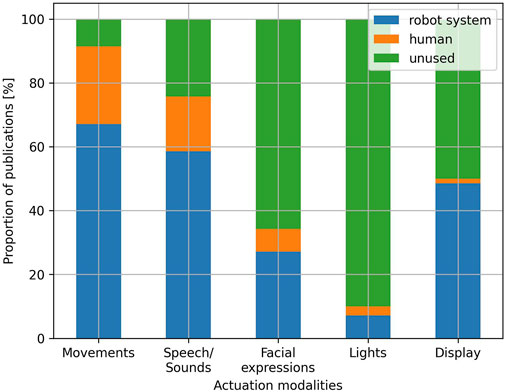
Figure 10. Proportion of publications per actuation modality and actor handling the modalities.
Speech and sounds is the second most used actuation modality and is used in 75.7% of the publications, with the robot handling this modality in a fully autonomous way in 58.6% of the publications, and a human operator handling it in 17.1% of the publications. Similarly to the hearing modality, when speech is handled autonomously by the robot, it is used with varying levels of complexity. At the lowest level, speech is completely pre-programmed and does not depend on the user’s actions. For example, in Alimardani et al. (2022), the robot utterances follow a pre-programmed script, which does not depend on any sensed information from the user. Similarly, in Rossi et al. (2019), a robot uses speech to provide recommendations to the user, but these recommendations always follow the same, user-independent, structure. At the intermediary level, the flow of the interaction can typically be represented with a finite-state machine: the transition from one state of the interaction to another depends on the user’s actions, which are sensed by the robot, and each state is associated with one or more pre-programmed speech routines, keeping the overall interaction rather constrained (Luperto et al., 2019; Kim et al., 2019; Ramnauth et al., 2022; Dennler et al., 2021). Finally, no publication allowing truly open-ended conversations, such as what is permitted by the recent advancements of large language models, is recorded. This is probably mostly explained by the fact that publications using LLMs are too recent to be included in the present survey, although compliance with ethical requirements might also impact the spread of LLM-based solutions in SAR contexts. When speech is handled by a human operator, such more advanced open-ended conversation are possible: for example, in Hijaz et al. (2021), a caregiver answers children with ASD through the robot, as in normal, robot-less, therapy sessions with ASD children. Similarly, in Fiorini et al. (2020), a caregiver communicates with elderly individuals through the robot in the same way as they would normally interact with elderly people at their workplace. In most cases, however, the interaction remains constrained, with the operator taking care of managing the flow of the interaction by sending adapted pre-programmed speech routines for the robot to execute (Azizi et al., 2022; Unnikrishnan et al., 2019; Vogt et al., 2019; Chen et al., 2022). In one publication, a combination of both open-ended speech and pre-programmed speech routines is used by the operator (Nakanishi et al., 2021). While most publications use speech, sounds are also used in several publications: in Sackl et al. (2022); Kothig et al. (2021) music is used to motivate the target users during physical activity, in Farrall et al. (2023) relaxing music is used instead to help with meditation, in Antunes et al. (2022) sounds are used in an inclusive storytelling activity for children with visual disabilities while in Uluer et al. (2020) sounds are used to perform hearing rehabilitation for children with hearing disabilities. While hearing and speech are typically jointly employed in human-human interaction, it is interesting to note the gap between hearing and speech in human-robot interaction. Indeed, 43.4% of the publications using speech and sounds as an actuation modality do not use hearing as a sensing modality. Hearing, and more specifically speech recognition, suffers from several limitations which are likely to explain this gap and that will be further discussed in Section 4.4.
Concerning the use of facial expressions as an actuation modality, it is present in 34.2% of the publications, with 27.1% being handled autonomously by the robot system, and 7.1% being handled by a human operator. This modality is used is several ways, for example, Azizi et al. (2022); Kothig et al. (2021); Dennler et al. (2021) use it to display emotions and provide feedback to users, while Palinko et al. (2021); Naik et al. (2021) use it as a way to align the robot’s gaze towards the user. Many publications also simply use this modality to render the robot more lively, typically synchronizing facial expressions with speech (Dino et al., 2019; Horn et al., 2022; Dennler et al., 2021). In most publications, facial expressions are conveyed through the use of displays acting as the robot face (such as the one of QTRobot) and mainly consist of animated faces or eyes. Only a few publications use robots whose facial expressions are performed through physical mechanisms (Mishra et al., 2019; Del Duchetto et al., 2019; Unnikrishnan et al., 2019). Additionally, in a handful of publications, facial expressions consist of a human operator’s face, which is transmitted through teleoperation on the robot’s display (Fiorini et al., 2020; Bordbar et al., 2021).
Finally, the use of light as an actuation modality is pretty rare and represents only 10% of the publications included in this review. This modality is handled in a fully autonomous way by the robot in 7.1% of the publications, while it is controlled by human operators in 2.9% of the publications. It is used in a variety of ways, for example, Nakanishi et al. (2021); Rossi et al. (2019); Antunes et al. (2022) link light colours to different emotion behaviours, while Kouvoutsakis et al. (2022) uses lights to stimulate the mobility of infant children. Lights are also used to communicate robot’s states and intentions to users. For example, in Nasir et al. (2019) lights are used to communicate an imaginary battery level to children during an educational activity, in Hwang et al. (2020), lights are used to notify the user when the robot is listening, in Lewandowski et al. (2020), lights are used to display the robot’s planned trajectory.
3.5.3 Transparency
When the robots are semi-autonomous or non-autonomous, researchers are the most common operators and represent 40.9% of the publications (Figure 11A). Researchers mainly operate robots for applications related to the field of education, but also appear in applications related to the health and workplace domains (Figure 11B). In 22.7% of the cases, the robots are controlled by field professionals. Field professionals operate robots in applications related to the health and workplace domains. No interventions related to the field of education employ field professionals as operators. It should be noted however that academic researchers were classified as researchers, although one could argue that they are also, to some extent, professionals in education. Examples of field professional operators are caregivers/therapists (Azizi et al., 2022; Fiorini et al., 2020; Hijaz et al., 2021), hotel staffs (Nakanishi et al., 2021) or policemen (Bordbar et al., 2021). Finally, robots are operated by target users themselves in 36.4% of the cases. In the field of education, the target user operators are typically children, for which controlling the robot behaviour is part of an educational activity targeting a specific learning gain. For example, in Nasir et al. (2019), the children learn about computational thinking, and more specifically path planning, by controlling the robot to go from a starting location to a goal destination while minimizing the cost of the path. Similarly, in Yadollahi et al. (2022), the children learn about perspective-taking, by controlling the robot displacements from different perspectives. In the health domain, examples of target user operators are users undergoing rehabilitation, for which controlling the robot is part of the rehabilitation process (Li X. et al., 2023), or users with disabilities for which teleoperation can help with social isolation (Mackey et al., 2022; Wang et al., 2021). Finally, in the workplace domain, Takada et al. (2021) presents a robotic shopping cart which is controlled by the target user and which performs product recommendations.
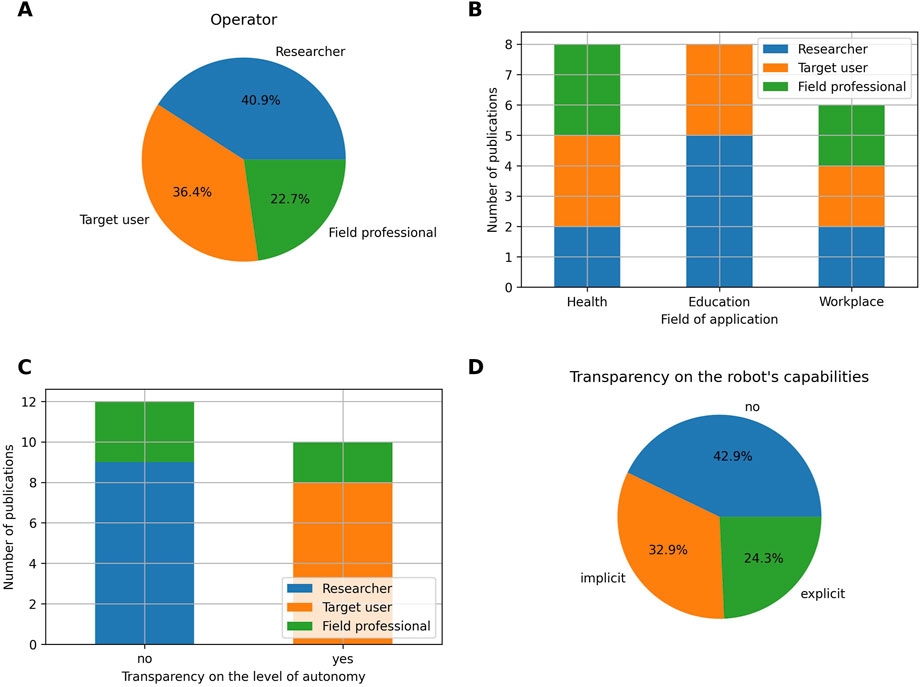
Figure 11. (A) Proportion of operators in the case of non-autonomous and semi-autonomous robots. (B) Number of publications with a semi-autonomous or non-autonomous level of autonomy per operator and field of application. (C) Number of publications per transparency on the level of autonomy and per operator. (D) Transparency on the robot’s capabilities.
Concerning transparency, the level of autonomy is known by the user in 45.5% of the cases (Figure 11C). The level of autonomy is mainly known in applications in which the operator is the target user itself and operating the robot is part of the SAR intervention. This case accounts for 80% of the publications in which the user is aware of the level of autonomy. When researchers are the ones controlling the robot, the level of autonomy is typically not divulged to the target users. Finally, the level of autonomy is divulged in two out of five publications using field professionals as operators. In these two cases, the robot possesses a display on which the face of the teleoperator is video streamed. More specifically, in Fiorini et al. (2020), a robot is placed in the home of elderly individuals, and a caregiver teleoperates the robot to visit and chat with them on a daily basis. In Bordbar et al. (2021), a robot teleoperated by a policeman interacts with another policeman acting as a citizen.
Finally, the robot capabilities are explicitly disclosed to the users in 24.3% of the publications, implicitly disclosed in 32.85% of the publications, and not disclosed in 42.85% of the publications (Figure 11D). Examples of publication that explicitly disclose the robot capabilities are Kraus et al. (2022), in which the robot performs an introductory dialogue to the user, describing its sensory system and functionalities, or Tolksdorf and Rohlfing (2020), in which the experimenter takes care of introducing the robot in a powered-off state to children users and explains its functions: they are for example, told that the robot can talk and move by using its motors. Note that four publications included in this review employed one or several of the publication’s authors as test users of the robotic intervention (Kothig et al., 2021; Chang et al., 2022; Humblot-Renaux et al., 2021; Naik et al., 2021); we consider the robot’s capabilities to be known in such cases. Finally, publications that implicitly disclose the robot’s capabilities are publications that would not directly reveal the robot’s capabilities to the users, but would perform a warm-up session, before the official robotic intervention, to familiarize the users with the robot and the way it acts (Kayukawa et al., 2023; Dino et al., 2019; Dennler et al., 2021).
4 Discussion
4.1 Choice of population
As outlined in Section 3.2, most robotic applications are tested with early adulthood and adulthood populations, while younger and older populations are less represented. This under-representation can be attributed to several factors. First, these populations tend to be more vulnerable, which generally implies that more meticulous considerations should be made when designing robotic interventions, and more thorough ethical applications are required. These needs can be a cause for delays or cancellations of studies, which might in turn reduce the number of publications involving vulnerable participants. Similarly, the need for more carefully designed robotic interventions can be a factor leading to preliminary tests with non-vulnerable participants, and can contribute to a form of mismatch between the population targeted by the robotic interventions and the population used to test the robotic interventions. While we do not observe mismatches based on age in the publications included in this review, we notice mismatches based on other factors such as the health condition for example, (a robotic intervention designed for a population affected by a specific condition is tested on a healthy population) (Carpio et al., 2019; Cooney et al., 2020; Chang et al., 2022). Finally, the assessment of even standard HRI metrics with more vulnerable populations may also present challenges. Conventional HRI assessment means, such as questionnaires, typically do not suit well the younger populations, and alternatives, such as gamified questionnaires (Stals et al., 2024; Druga et al., 2017) or drawings (Rudenko et al., 2024) are still not widely adopted.
This review calls for more representation of the younger and older populations. These populations are not only the least represented, but are also often the most vulnerable, and therefore the ones that could potentially benefit the most from SARs. To this extent, efforts in sharing collected data (Gunes et al., 2022; Bagchi et al., 2023), as well as ensuring agreement within the community concerning which data can and should be shared, could help in developing SARs technologies for these populations and thus in reducing their under-representation. Finally, while preliminary tests on convenience populations can benefit vulnerable populations by preventing risks of harm, the results of such tests might not necessarily transfer to the vulnerable populations. As such, the review calls HRI researchers to consider such tests as a part of the iterative design process but not as a replacement of tests with the populations targeted by a robotic intervention.
4.2 SARs: various, humanoids and peers
As outlined in Section 3.3, the field of HRI is characterized by a plethora of different robots, with some being commercially available, and others being ad hoc designed. This observation can be viewed as positive since choosing or designing a robot to fit a specific intervention and target users can be key to ensuring the success of the intervention. This trend is notably enhanced by the participatory design paradigm, which aims at involving all the stakeholders in the design process of a technology to ensure that the designed technology meets the needs of its user base (Schuler and Namioka, 1993). However, the plethora of robots used can also raise difficulties. The most notable one concerns the replication of studies and their associated findings, as results that might hold for one robot might not necessarily hold for others. Furthermore, the plethora of robots used also makes transferability, and thus reusability of code more difficult, since many robots often come with their own programming interface. This review thus calls for more standardization in terms of software and hardware. Concerning the software, the use of standard middlewares such as ROS, as well as the use of robot programming conventions such as the ones presented in Mohamed and Lemaignan (2021), should be favoured whenever possible. Concerning the hardware, initiatives such as the one presented in Alves-Oliveira et al. (2022) could be further explored by the HRI community. More specifically, Alves-Oliveira et al. (2022) present a social robot embodiment kit which is intended to be flexible and to allow for customization. This kind of robot kit could represent a good tradeoff between customization, to fit a specific intervention and user base, and hardware standardization, as most of the robot hardware remains the same across different intervention cases.
As demonstrated in Section 3.3, the majority of robots employed in the field of HRI exhibit a humanoid morphology (75.7%). Because of such prevalence, researchers should remain conscious of some design principles that may negatively influence the outcomes of their intervention. One of such principles is often referred to as “Form matches function,” and states that target users expect robots to possess the sensing and actuation capabilities suggested by their appearance (Bartneck et al., 2024). In the case of humanoid robots, which are prevalent in this review, people would expect them to do human-like things such as moving, talking, hearing, seeing, etc. While some actuation modalities typically used by humans such as moving and talking are commonly implemented in robots (and even autonomously), as seen in Section 3.5.2, other typically human modalities, such as hearing for example, are used to a smaller extent, as described in Section 3.5.1 and further discussed in Section 4.4. As a result of such a gap, people might get disappointed and negatively perceive the robot. To prevent such issues, it might be interesting to be transparent with the user and communicate what are the actual capabilities of the robot. Alternatively, it might be worth exploring other types of robot morphology, such as zoomorphic or objectmorphic designs, which are currently underrepresented in the literature, and might even be better suited than humanoids for some contexts and applications.
The results of this review also point out that robots are predominantly programmed to act as peers during interventions, while the subordinate and tutor roles are less represented. In the field of education (Tolksdorf and Rohlfing, 2020; Park et al., 2019), justify this choice by mentioning the benefits of peer robots identified by previous research, such as the facts that children may feel more comfortable, less inhibited, and show a greater ability to focus when interacting with a robot that fulfils the role of a peer (Westlund et al., 2016; Zaga et al., 2015). Similarly (Salomons et al., 2022a), compared a robot acting as a peer with one acting as a tutor in an education context and found that participants with low prior domain knowledge learned significantly more with the peer robot. Additionally, the peer robot was also perceived as friendlier, more social, smarter, and more respectful than the tutor robot, regardless of the initial skill level of the participants (Salomons et al., 2022a). While the peer role has strong benefits, we argue that the other roles can also be successful depending on the intervention, and are worth exploring. For instance, Gargot et al. (2021) leveraged the learning by teaching paradigm to treat severe dysgraphia in children. More specifically, a child played the role of the tutor and the robot acted as a tutee requiring help to improve its handwriting. By doing so, positive results were achieved, such as improvements in the child’s handwriting and posture quality.
4.3 SARs: individualized and short-term interventions
The interventions’ size, length, and environment reflect the level of complexity of a given intervention. Large-size interventions are more challenging as they require the robotic system to have more advanced sensing capabilities, as well as take more variables into consideration in the reasoning process. Long-term interventions are challenging from a systems engineering perspective as they require the technology to be robust, intuitive, and engaging enough for repetitive use (Clabaugh and Matarić, 2019). Finally, real-world environments are more noisy and less controlled compared to laboratory settings, and thus also require more robust HRI technology (as further discussed in Section 4.4). As described in Section 3.4, the majority of studies are dyadic (80%) and only involve a single session (68.6%). These findings place the main body of SAR research on the lower end of the complexity spectrum and are consistent with the results of other reviews, such as that of Clabaugh and Matarić (2019), although their review only examines fully autonomous robots.
While focusing on dyadic interactions may reduce the overall complexity of the interventions, this also places SARs as highly individualized intervention tools, and, by extension, as a very expensive technology. It is often argued that one of the main benefits of SARs is to offer individual, adaptive and personalized interactions. While this may be appropriate for certain domains, such as health, which typically relies on individualized interactions, other domains may be affected by this viewpoint of SARs. The field of education, for instance, typically relies on group interactions, and as such, efforts in implementing SAR technology that adapts to groups instead of individuals could not only help in bridging the gap with the real world, but also in mitigating the issue of developing costly technology.
Similarly, the prevalence of single-session interventions also contributes to positioning SARs as an expensive technology, since investing significant amounts of time and effort in developing interventions with a limited lifespan is legitimately questionable. SARs have the potential (and, one could argue, the necessity) to adapt not only to higher interaction sizes but also to longer interaction lengths. This is for example, explored in Park et al. (2019), which is one of the few publications included in this review that conducts an intervention lasting more than a month. Specifically, the authors focus on children’s early literacy training through robot-mediated storytelling. The robot disposes of a large database of children’s storybooks and uses a method based on reinforcement learning to select stories that are optimized for each child’s engagement and linguistic skill progression. The prevalence of single-session interventions also highlights the fact that the main body of HRI research is subject to the novelty effect. As in the case of the intervention size, we argue that also in intervention length there is a discrepancy between the current state of HRI research and the real world. The field of education, for example, is typically a long-term process requiring practice and multiple interventions to be successful (Shute et al., 1998). Similarly, in the health domain, long-term interactions generally have a positive impact on therapeutic alliance, i.e., the collaborative relationship between a healthcare professional and a patient, which in turn, positively affects the efficacy of treatments (Martin et al., 2000). In such domains, the novelty effect greatly impacts the validity and generalizability of findings based on single-session interventions.
Other methods could be used to mitigate the issue of SARs being a costly solution. For example, efforts could be made with respect to the robot’s hardware. Three-dimensional (3D) printing and other technologies such as laser cutting or low-cost single-board computers have helped in this regard (Bartneck et al., 2024). In this review, several publications have employed robots designed with such techniques (Chang et al., 2022; Palinko et al., 2021; Unnikrishnan et al., 2019; Nasir et al., 2019; Lin et al., 2020), however, they remain a minority. This review thus suggests HRI researchers to reflect on the requirements of their research contexts, and favor technologies that are more affordable, and thus potentially more transferable to the society (such as the ones employed in the publications mentioned above or other low-cost and open-source robot designs like Flexi [Alves-Oliveira et al., 2022) or PixelBot (Maure and Bruno, 2023)], whenever their research contexts do not justify a need for expensive and advanced technologies.
4.4 Investigating researchers’ rationale for SARs’ levels of autonomy
In this subsection, we attempt to provide insights concerning the choice of robots’ level of autonomy at the functionality level, in an effort towards understanding the lack of researcher’s rationale identified by Elbeleidy et al. (2022).
As outlined in Section 3.5, the majority of the publications included in this review use robots that are capable of performing the intervention in a fully autonomous manner (68.6%), whereas semi-autonomous and non-autonomous robots are represented in a smaller extent, respectively accounting for 17.1% and 14.3% of the publications. The prominence of fully autonomous SARs can be partly explained by our search pattern, which mainly targets publications whose SAR system present some degree of autonomy. However, it should be noted that this prevalence was also found in the review of Elbeleidy et al. (2022), although they used a search pattern which did not enforce any specific level of autonomy, and thus represents the literature on SAR autonomy more fairly. In their review, Elbeleidy et al. (2022) mention that this vision of fully autonomous SARs by the HRI community may be partly explained by the vision of the researchers who defined the concept of SARs in the first place, who stated: “Ideally, a SAR system requires no expert operator or extensive training for use. It should be self explanatory and capable of being started, stopped, and configured by people already providing care with a minimum burden placed upon them” (Feil-Seifer and Mataric, 2005). This vision is commonly justified by stating that WoZ techniques become intractable in SAR domains requiring long-term and in-the-wild interventions (Clabaugh and Matarić, 2019).
When it comes to the other types of robot LoA (semi-autonomous and non-autonomous), this review argues that their choice over full autonomy could be motivated by the complexity of real-world environments and the limitations of the technologies typically used in the field of HRI. By observing Figure 7C for example, we notice that the majority of studies performed in a laboratory setting use fully autonomous robots (82.6%), while studies performed in the real world use fully autonomous robots to a smaller extent (62.16%). While this finding can appear counter-intuitive at first, since it can be argued that laboratory settings represent the perfect environment to control the interactions and use teleoperated robots in a semi or non-autonomous manner, it can also be argued that laboratory settings, by being more controlled, are less complex, require less robustness, and are thus simpler testbeds for fully autonomous HRI technology. To illustrate this hypothesis, we discuss the cases of two sensing modalities analysed in this review, namely, hearing and touch. To start, it is interesting to note that 71.1% of the publications not using hearing as a sensing modality use the touch modality instead. This observation is likely explained by several limitations of the hearing modality. First, hearing, and more specifically speech recognition, is affected by ambient noises. Although most speech recognition frameworks allow for ambient noise calibration, they remain a limiting factor, making speech recognition difficult to deploy, especially in non-controlled in-the-wild environments. In this review, for example, among the studies taking place in a controlled laboratory setting, hearing is handled fully autonomously by robots in 39.1% of the cases and is handled by humans in 8.69% of the cases. While keeping the predominance of robot-handled hearing, real-world settings significantly reduce this gap: hearing is handled autonomously by robots in 27% of the studies conducted in real-world settings, and by humans in 21.6% of the cases. Second, speech recognition also often suffers from timing issues. Indeed, without proper feedback on the robot side, human users often tend to speak when the robot is not yet listening. Similarly, inaccuracies in voice activity detection often result in the listening phase stopping before the end of users’ utterances. This issue can also arise when humans think and remain silent in between two utterances. Third, as mentioned in Tolksdorf and Rohlfing (2020), some populations, especially children, are often underrepresented in the training process of speech recognition techniques, which lowers the accuracy for these specific populations. In this review, only 10% of the publications involving school age and lower Erikson age categories use hearing in a fully automated way, while it is handled by a human in 30% of the cases, and not used at all in the remaining 60%. Finally, many commonly used speech recognition frameworks also face difficulties when used in interactions involving a group of individuals. For example, in this review, only 28.6% of the publications involving a triadic or bigger intervention size use hearing in a fully automated way, while the remaining 71.4% either rely on humans or do not use this modality at all. On the other hand, most of the limitations mentioned above concerning hearing do not hold for touch sensing. Indeed, the accuracy of this modality is not influenced by ambient noises nor by the age of the population using it, and it is also less impacted by timing issues and the intervention group size. Finally, while touch can allow open-ended user inputs [such as the user’s hand-writing as described in Kim et al. (2019)], it is commonly used for simple and constrained user inputs, suitable for interaction flows defined as a finite-state machine. To conclude, hearing is a good example of a sensing modality which is typically used in human-human interaction, but not used to a similar extent in human-robot interaction because of the challenges associated with it, which are yet to be overcome by the currently existing technical solutions. These technical limitations, which can also apply to other modalities, are a plausible explanation for letting a human operator handle some of the robot capabilities, or replacing them with other more robust and easily automated ones, and thus give one potential rationale for the overall choice of robots’ LoA.
As a closing remark, while some technical challenges associated to the field of HRI remain as of today, we can expect that a growing number of them will be overcome in the future. When it comes to speech recognition of underrepresented populations such as children for example, the latest models, especially the Whisper models, have shown significant improvements in the recent years (Janssens et al., 2024). Such models are also showing improvements concerning responsiveness, achieving delays below the maximum acceptable delay for human-robot interaction
4.5 SARs as undercover HCI
As described in Section 3.5.2, movements represent an essential aspect of SARs and are used to a great extent (91.4% of the publications included in this review). This finding highlights the desire of HRI researchers to leverage the physical embodiment of robots, which is a key element differentiating robots from virtual agents and the field of HCI. On the other hand, as mentioned in Section 3.5.2, 50% of the publications included in this review use displays as an actuation modality, and among them, 80.5% use this modality through hardware components that are external to the robot (not built-in). The fact that displays are often absent from the robots’ original design and are specifically added by HRI researchers highlights their importance in the interaction. Similarly, one can argue that the popularity of Pepper as a SAR platform, as seen in Section 3.3, is partly explained by the fact that it possesses a built-in display. In many cases, the interaction is designed and centred around the display, and the robot rather acts as an animated appendix, complementing the interaction with other actuation modalities, such as movements. While these modalities may contribute to the effectiveness of the intervention, we argue that they remain a complement to the intervention, rather than a necessity, unlike displays, without which the whole intervention would not be possible, thus revealing certain proximity of SARs interventions to HCI rather than HRI. Additionally, we argue that the use of certain modalities, such as movements in particular, solely as a complement to the interaction, underlines a sort of paradox of SARs, which was initially raised by Feil-Seifer and Mataric (2005). By constraining social robots to social gestures, and not letting them rely on direct physical interaction, researchers limit the potential of robots and their main advantage over computers and the field of HCI, which lies in their physical action capabilities. To distinguish the field of HRI from the one of HCI, researchers should reflect on whether the use of displays as the main intervention means is truly necessary, and possibly design novel human-robot interactions that truly take advantage of the robot’s physical embodiment. In that regard, we argue that assistive robots, to reach their full potential, should not be limited to social intervention only, nor to physical intervention only, but rather on a combination of the two. While a previous research workshop already introduced this concept and attempted to bring the physically assistive robotics (PAR) and the socially assistive robotics communities together, it seems that the current body of the literature does not clearly define this concept yet. As such, this review proposes the name Physically and Socially Assistive Robotic (PSAR), and calls for more collaboration between the PAR and SAR communities to provide a clear definition of PSAR as well as to advance the current state of research towards this direction.
4.6 Transparency
Concerning transparency with respect to the level of autonomy and the robots’ capabilities, we believe that these can have both advantages and disadvantages. First, this review argues that transparency on the robot’s capabilities can help the target users in better understanding the system they are interacting with, and thus facilitate the overall interaction. To illustrate this point, we report some of the qualitative results from a publication analyzed in this review, namely, Chen et al. (2022), in which a social robot was used in long-term in-the-wild parent-child-robot storytelling activities. More specifically, the authors report that some parent had no idea what the robot was capable of understanding and/or doing in the triadic interaction and hence had no idea how to interact with the robot properly, especially at the beginning. One of the parent who participated in their study said for example,: “[Jibo] listens to me talking about [the story] and then pipes up with a question [but] you do not really know if it is really understanding you or to what level of understanding you … .” Similarly to this lack of transparency, some of the parents commented on the lack of an initial familiarization process: “But I do admit it did take a bit of getting used to … The first time [Jibo] was talking, I found him more disruptive a bit just because I was not used to it.” While warm-up sessions are explored in some of the publications included in this review, as described in Section 3.5.3, they remain a minority, and the comments mentioned above are a testament to their importance. Finally, the comments mentioned above also highlight the importance of transparency on the robot’s capabilities, to facilitate the overall human-robot interaction.
As discussed in Section 4.2, transparency with respect to the robots’ capabilities can also benefit the interaction by reducing the risk of unmet expectations. Indeed, letting the users know what the robot is capable of, and what it is not, can be a way to avoid raising their expectations over the robots’ actual capabilities, which would in-turn help in preventing any sort of disappointment that would be detrimental to the success of the interaction (Paepcke and Takayama, 2010).
Fully autonomous SARs can also raise ethical concerns when it comes to data privacy and security (Zhong et al., 2025). Indeed, online cloud-based solutions are often leveraged to by-pass the limitations of social robots when it comes to on-board computational power. This is notably the case for some speech recognition libraries or LLMs used as dialogue manager. While these cloud-based solutions offer new opportunities for social robots, they also require users’ data to be handled by third party entities. On that regard, transparency is a necessary requirement to ensure that users are aware of the way their data is extracted and manipulated by social robots. Similarly, initiatives such as TinyML, aiming at compressing standard AI models and enabling their execution on local and low-power hardware, can also assist in reducing the reliance on cloud computing and, by extension, in safeguarding users’ data privacy. While transparency about the robots’ capabilities presents several advantages, we believe that there are specific cases in which such transparency should be avoided. If we take again the example of the Paro robot for instance, it can be argued that one of the reasons of its success resides in its design, which takes advantage of the principle “Interaction expands function.” This design principle, particularly effective for robots with limited capabilities, refers to the act of designing a robot in an open-ended way, in order to incite the target users to “fill in the blanks” left open by the design by themselves (Bartneck et al., 2024). As a result, target users invent their own way of interacting with the robot, which in turn helps in limiting disappointments linked to the robot’s limited capabilities. In such cases, transparency on the robot’s capabilities would work against such design principle, and thus limit the effectiveness of robots relying on it.
Finally, as mentioned by Riek (2012), the WoZ method raises ethical concerns, both for the target user, who is subject to deception, and for the operator, who is required to perform deception. While being transparent on robots’ LoA could represent an ethical solution, it will not change the fact that the robots are controlled by a human, nor guarantee that users will correctly understand or believe the explanation (Nasir et al., 2022).
5 Conclusion
This article reports a systematic review on socially assistive robotics. The review follows the PRISMA method and analyzes 70 publications published over the last 5 years. The publications are studied under different lenses: the application domains, the populations used to test the interventions, the robots’ morphology, realism and role, the interventions’ size, length and environment, the level of autonomy employed in robots based on an analysis of each of their sensing and actuation capabilities, the operators typically involved in the control of non- and semi-autonomous robots, and the transparency with respect to the robots’ level of autonomy and capabilities.
In terms of populations, the main body of SAR research focuses on adult and early adult populations, while younger and older populations are less represented and represent an opportunity for future research. The robots employed to fulfill the role of SAR are various. While this can be advantageous to select a robot that is adapted to a specific intervention and population, it also raises difficulties in terms of transferability of findings between robots, as well as transferability and reuse of code bases. To this end, more standardization is desirable and could be further explored in future research. Additionally, the vast majority of SARs exhibit a humanoid morphology, which might lead the target users to have high expectations about the robots’ capabilities, and in turn cause disappointment. On that regard, other types of robot morphology might be worth exploring in the future. Concerning the interventions in which SARs are employed, most are characterized by individualized and short-term interactions, which contribute to position SARs as an expensive technology with limited impact. Additionally, the short-term nature of SARs studies makes them prone to the novelty effect, which limits the validity of their results. Efforts should be made by the SAR research community to conduct higher-size and longer-term interventions to limit the aforementioned issues. With respect to the level of autonomy, the majority of studies we reviewed employ fully autonomous robots. While this is partly due to our search pattern, which focusses on publications whose SAR system present some degree of autonomy, the prominence of fully autonomous robots was also observed in other literature reviews, mainly the one of Elbeleidy et al. (2022), although using a search pattern representing the spectrum of SAR autonomy more fairly, and can thus be considered a real characteristic of the field. We argue that this prominence is mainly influenced by an initial vision promoting full autonomy in SAR to ensure their tractability and adoption in the real world. On the other hand, among the factors that could explain a preference for non- or semi-autonomous robots, we list intervention designs for which operating the robot is part of the assistive intervention itself, the reluctance of field professionals to use a technology that could potentially replace them, and, above all, the limitations of the current technologies required by SARs. As a result of these limitations, we point out that SARs over-rely on technology traditionally associated to HCI, such as displays and tablets, and we argue that future research, aiming to fully leverage the unique characteristics of HRI, should be dedicated to Physically and Socially Assistive Robots (PSAR): a class of robots not only relying on social interaction to provide assistance, but also taking full advantage of their embodiment, and viewing physical assistance as (also) a type of social assistance or anyway eliciting social reactions that the robot should not ignore. Finally, with respect to transparency about robots’ level of autonomy and capabilities, we argue that these can present several advantages, such as helping the target users in better understanding the system they are interacting with and thus facilitating the overall interaction, or helping in limiting disappointments that would result from over-expectations of the robots’ capabilities. However, we also identify cases in which transparency could be detrimental, and argue that the impact of transparency is still unclear, and requires further research by the community.
This review provides an analysis of socially assistive robotics centered around their level of automation. Several gaps and limitations of the current state of SAR research are identified and significant advancements in the field can be made by addressing these gaps in the future.
Data availability statement
The original contributions presented in the study are publicly available. This data can be found here: https://docs.google.com/spreadsheets/d/1u5dONx1YIGruVeWI9WjGM2jN8EUnffBZhfhXlbh6H5o/edit?usp=sharing.
Author contributions
RM: Conceptualization, Investigation, Methodology, Visualization, Writing – original draft, Writing – review and editing. BB: Conceptualization, Investigation, Methodology, Supervision, Visualization, Writing – original draft, Writing – review and editing.
Funding
The author(s) declare that financial support was received for the research and/or publication of this article. This work was funded by the Baden-Württemberg Ministry of Science, Research and Art (MWK), using funds from the state digitalisation strategy digital@bw.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Any alternative text (alt text) provided alongside figures in this article has been generated by Frontiers with the support of artificial intelligence and reasonable efforts have been made to ensure accuracy, including review by the authors wherever possible. If you identify any issues, please contact us.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
1The list of the 70 included publications and their classification on the basis of the proposed coding scheme is accessible at the following link: https://docs.google.com/spreadsheets/d/1u5dONx1YIGruVeWI9WjGM2jN8EUnffBZhfhXlbh6H5o/edit?usp=sharing
2Fast or speed reading is a technique aimed at increasing the rate at which a person reads text while maintaining comprehension. It often involves a stronger reliance on peripheral vision, with the eyes move from one line to another along a broken path in the form of a snake, rather than following each line from the beginning to the end. More details about speed reading can be found at the following link: https://en.wikipedia.org/wiki/Speed_reading.
References
Alimardani, M., Duret, J. L., Jouen, A.-L., and Hiraki, K. (2022). “Robot-assisted language learning increases functional connectivity in children’s brain,” in 2022 17th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 674–677.
Alves-Oliveira, P., Bavier, M., Malandkar, S., Eldridge, R., Sayigh, J., Björling, E. A., et al. (2022). “Flexi: a robust and flexible social robot embodiment kit,” in Proceedings of the 2022 ACM designing interactive systems conference (New York, NY: IEEE), 1177–1191.
Antunes, C., Neto, I., Correia, F., Paiva, A., and Nicolau, H. (2022). “Inclusive’r stories: an inclusive storytelling activity with an emotional robot,” in 2022 17th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 90–100.
Azizi, N., Chandra, S., Gray, M., Sager, M., Fane, J., and Dautenhahn, K. (2022). “An initial investigation into the use of social robots within an existing educational program for students with learning disabilities,” in 2022 31st IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 1490–1497.
Bagchi, S., Holthaus, P., Beraldo, G., Senft, E., Hernandez Garcia, D., Han, Z., et al. (2023). “Towards improved replicability of human studies in human-robot interaction: recommendations for formalized reporting,” in Companion of the 2023 ACM/IEEE international conference on human-robot interactionv (New York, NY: IEEE), 629–633.
Bartneck, C., Belpaeme, T., Eyssel, F., Kanda, T., Keijsers, M., and Šabanović, S. (2024). Human-robot interaction: an introduction. Cambridge: Cambridge University Press.
Beer, J. M., Fisk, A. D., and Rogers, W. A. (2014). Toward a framework for levels of robot autonomy in human-robot interaction. J. human-Robot Interact. 3, 74. doi:10.5898/jhri.3.2.beer
Bordbar, F., Salehzadeh, R., Cousin, C., Griffin, D. J., and Jalili, N. (2021). “Analyzing human-robot trust in police work using a teleoperated communicative robot,” in 2021 30th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 919–924.
Breazeal, C., Dautenhahn, K., and Kanda, T. (2016). Social robotics. Cham, Switzerland: Springer, Cham, 1935–1972.
Cao, Y., Huang, J., Li, X., Zhang, M., Xiong, C., Mohammed, S., et al. (2022). “Metabolic efficiency improvement of human walking by shoulder stress reduction through load transfer backpack,” in 2022 IEEE/RSJ international conference on intelligent robots and systems (IROS) (New York, NY: IEEE), 3934–3939.
Carpio, E., Clark-Turner, M., and Begum, M. (2019). “Learning sequential human-robot interaction tasks from demonstrations: the role of temporal reasoning,” in 2019 28th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 1–8.
Cauchard, J. R., Tamkin, A., Wang, C. Y., Vink, L., Park, M., Fang, T., et al. (2019). “Drone. io: a gestural and visual interface for human-drone interaction,” in 2019 14th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 153–162.
Chang, C.-M., Sanches, F., Gao, G., Johnson, S., and Liarokapis, M. (2022). “An adaptive, affordable, humanlike arm hand system for deaf and deafblind communication with the American sign language,” in 2022 IEEE/RSJ international conference on intelligent robots and systems (IROS) (New York, NY: IEEE), 871–878.
Charisi, V., Merino, L., Escobar, M., Caballero, F., Gomez, R., and Gómez, E. (2021). “The effects of robot cognitive reliability and social positioning on child-robot team dynamics,” in 2021 IEEE international conference on robotics and automation (ICRA) (New York, NY: IEEE), 9439–9445.
Chen, H., Ostrowski, A. K., Jang, S. J., Breazeal, C., and Park, H. W. (2022). “Designing long-term parent-child-robot triadic interaction at home through lived technology experiences and interviews,” in 2022 31st IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 401–408.
Clabaugh, C., and Matarić, M. (2019). Escaping oz: autonomy in socially assistive robotics. Annu. Rev. Control, Robotics, Aut. Syst. 2, 33–61. doi:10.1146/annurev-control-060117-104911
Cooney, M., Orand, A., Larsson, H., Pihl, J., and Aksoy, E. E. (2020). “Exercising with an “iron man”: design for a robot exercise coach for persons with dementia,” in 2020 29th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 899–905.
Del Duchetto, F., Baxter, P., and Hanheide, M. (2019). “Lindsey the tour guide robot-usage patterns in a museum long-term deployment,” in 2019 28th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 1–8.
Dennler, N., Yunis, C., Realmuto, J., Sanger, T., Nikolaidis, S., and Matarić, M. (2021). “Personalizing user engagement dynamics in a non-verbal communication game for cerebral palsy,” in 2021 30th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 873–879.
Dino, F., Zandie, R., Abdollahi, H., Schoeder, S., and Mahoor, M. H. (2019). “Delivering cognitive behavioral therapy using a conversational social robot,” in 2019 IEEE/RSJ international conference on intelligent robots and systems (IROS) (New York, NY: IEEE), 2089–2095.
Domínguez-Vidal, J. E., Torres-Rodríguez, I. J., Garrell, A., and Sanfeliu, A. (2021). “User-friendly smartphone interface to share knowledge in human-robot collaborative search tasks,” in 2021 30th IEEE international conference on robot & human interactive communication (RO-MAN) (New York, NY: IEEE), 913–918.
Donnermann, M., Schaper, P., and Lugrin, B. (2020). “Integrating a social robot in higher Education–a field study,” in 2020 29th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 573–579.
Druga, S., Williams, R., Breazeal, C., and Resnick, M. (2017). ““hey google is it ok if i eat you?” initial explorations in child-agent interaction,” in Proceedings of the 2017 conference on interaction design and children, 595–600.
Elbeleidy, S., Mott, T., and Williams, T. (2022). “Practical, ethical, and overlooked: teleoperated socially assistive robots in the quest for autonomy,” in 2022 17th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 577–587.
Erikson, E. H., and Erikson, J. M. (1998). The life cycle completed (extended version). New York, USA: W.W. Norton.
Farrall, A., Taylor, J., Ainsworth, B., and Alexander, J. (2023). Manifesting breath: empirical evidence for the integration of shape-changing biofeedback-based artefacts within digital mental health interventions. New York, NY, USA: Association for Computing Machinery, 1–14.
Feil-Seifer, D., and Mataric, M. J. (2005). “Defining socially assistive robotics,” in 9th international conference on rehabilitation robotics, 2005. ICORR 2005 (New York, NY: IEEE), 465–468.
Feil-Seifer, D., and Matarić, M. J. (2011). Socially assistive robotics. IEEE Robotics Automation Mag. 18, 24–31. doi:10.1109/mra.2010.940150
Fiorini, L., Mancioppi, G., Becchimanzi, C., Sorrentino, A., Pistolesi, M., Tosi, F., et al. (2020). “Multidimensional evaluation of telepresence robot: results from a field trial,” in 2020 29th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 1211–1216.
Fraser, N. M., and Gilbert, G. N. (1991). Simulating speech systems. Comput. Speech Lang. 5, 81–99. doi:10.1016/0885-2308(91)90019-m
Gallenberger, D., Bhattacharjee, T., Kim, Y., and Srinivasa, S. S. (2019). “Transfer depends on acquisition: analyzing manipulation strategies for robotic feeding,” in 2019 14th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 267–276.
Gargot, T., Asselborn, T., Zammouri, I., Brunelle, J., Johal, W., Dillenbourg, P., et al. (2021). “It is not the robot who learns, it is me.” treating severe dysgraphia using child–robot interaction. Front. Psychiatry 12, 596055. doi:10.3389/fpsyt.2021.596055
Glas, D. F., Minato, T., Ishi, C. T., Kawahara, T., and Ishiguro, H. (2016). “Erica: the erato intelligent conversational android,” in 2016 25th IEEE international symposium on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 22–29.
Green, A., Huttenrauch, H., and Eklundh, K. S. (2004). “Applying the wizard-of-oz framework to cooperative service discovery and configuration,” in RO-MAN 2004. 13th IEEE international workshop on robot and human interactive communication (IEEE catalog no. 04TH8759) (New York, NY: IEEE), 575–580.
Gunes, H., Broz, F., Crawford, C. S., der Pütten, A. R.-v., Strait, M., and Riek, L. (2022). Reproducibility in human-robot interaction: furthering the science of hri. Curr. Robot. Rep. 3, 281–292. doi:10.1007/s43154-022-00094-5
Gunson, N., García, D. H., Sieińska, W., Dondrup, C., and Lemon, O. (2022). “Developing a social conversational robot for the hospital waiting room,” in 2022 31st IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 1352–1357.
Hijaz, A., Korneder, J., and Louie, W. -Y. G. (2021). “In-the-wild learning from demonstration for therapies for autism spectrum disorder,” in 2021 30th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 1224–1229.
Horn, H.-P., Nadig, M., Hackbarth, J., Willms, C., Jacob, C., Autexier, S., et al. (2022). “Iterative user-centric development of Mobile robotic systems with intuitive multimodal human-robot interaction in a clinic environment,” in 2022 31st IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 963–968.
Humblot-Renaux, G., Li, C., and Chrysostomou, D. (2021). “Why talk to people when you can talk to robots? Far-field speaker identification in the wild,” in 2021 30th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 272–278.
Hwang, E. J., Ahn, B. K., Macdonald, B. A., and Ahn, H. S. (2020). “Demonstration of hospital receptionist robot with extended hybrid code network to select responses and gestures,” in 2020 IEEE international conference on robotics and automation (ICRA) (New York, NY: IEEE), 8013–8018.
Janssens, R., Verhelst, E., Abbo, G. A., Ren, Q., Bernal, M. J. P., and Belpaeme, T. (2024). “Child speech recognition in human-robot interaction: problem solved?,” in International conference on social robotics (Singapore: Springer, Singapore), 476–486.
Kayukawa, S., Sato, D., Murata, M., Ishihara, T., Takagi, H., Morishima, S., et al. (2023). Enhancing blind visitor’™s autonomy in a science museum using an autonomous navigation robot. New York, NY, USA: Association for Computing Machinery, 1–14.
Kelley, J. F. (1984). An iterative design methodology for user-friendly natural language office information applications. ACM Trans. Inf. Syst. (TOIS) 2, 26–41. doi:10.1145/357417.357420
Kim, A., Omarova, M., Zhaksylyk, A., Asselborn, T., Johal, W., Dillenbourg, P., et al. (2019). “Cowriting Kazakh: transitioning to a new latin script using social robots,” in 2019 28th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 1–6.
Koenig, A., y Baena, F. R., and Secoli, R. (2021). “Gesture-based teleoperated grasping for educational robotics,” in 2021 30th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 222–228.
Kothig, A., Munoz, J., Akgun, S. A., Aroyo, A. M., and Dautenhahn, K. (2021). “Connecting humans and robots using physiological signals–closing-the-loop in hri,” in 2021 30th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 735–742.
Kouvoutsakis, G., Baxevani, K., Tanner, H. G., and Kokkoni, E. (2022). “Feasibility of using the robot sphero to promote perceptual-motor exploration in infants,” in 2022 17th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 850–854.
Kowalski, C., Brinkmann, A., Hellmers, S., Fifelski-von Böhlen, C., and Hein, A. (2022). “Comparison of a vr-based and a rule-based robot control method for assistance in a physical human-robot collaboration scenario,” in 2022 31st IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 722–728.
Kraus, M., Wagner, N., Minker, W., Agrawal, A., Schmidt, A., Prasad, P. K., et al. (2022). “Kurt: a household assistance robot capable of proactive dialogue,” in 2022 17th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 855–859.
Lambrecht, J., and Nimpsch, S. (2019). “Human prediction for the natural instruction of handovers in human robot collaboration,” in 2019 28th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 1–6.
Lewandowski, B., Wengefeld, T., Müller, S., Jenny, M., Glende, S., Schröter, C., et al. (2020). “Socially compliant human-robot interaction for autonomous scanning tasks in supermarket environments,” in 2020 29th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 363–370.
Li, J., Sousa, M., Mahadevan, K., Wang, B., Aoyagui, P. A., Yu, N., et al. (2023a). “Stargazer: an interactive camera robot for capturing how-to videos based on subtle instructor cues,” in Proceedings of the 2023 CHI conference on human factors in computing systems, 1–16.
Li, X., Zeng, H., Yang, C., and Song, A. (2023b). “Robot-assisted eye-hand coordination training system by estimating motion direction using smooth-pursuit eye movements,” in 2023 IEEE international conference on robotics and automation (ICRA) (New York, NY: IEEE), 9852–9857.
Lin, Y., Guo, J., Chen, Y., Yao, C., and Ying, F. (2020). It is your turn: collaborative ideation with a co-creative robot through sketch. New York, NY, USA: Association for Computing Machinery, 1–14.
Luperto, M., Romeo, M., Lunardini, F., Basilico, N., Abbate, C., Jones, R., et al. (2019). “Evaluating the acceptability of assistive robots for early detection of mild cognitive impairment,” in 2019 IEEE/RSJ international conference on intelligent robots and systems (IROS) (New York, NY: IEEE), 1257–1264.
Mackey, B., Bremner, P., and Giuliani, M. (2022). “Usability of an immersive control system for a humanoid robot surrogate,” in 2022 31st IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 678–685.
Martin, D. J., Garske, J. P., and Davis, M. K. (2000). Relation of the therapeutic alliance with outcome and other variables: a meta-analytic review. J. Consult. Clin. Psychol. 68, 438–450. doi:10.1037/0022-006x.68.3.438
Maure, R., and Bruno, B. (2023). “Participatory design of a social robot and robot-mediated storytelling activity to raise awareness of gender inequality among children,” in 2023 32nd IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 974–981.
McQuillin, E., Churamani, N., and Gunes, H. (2022). “Learning socially appropriate robo-waiter behaviours through real-time user feedback,” in 2022 17th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 541–550.
Mishra, N., Ramanathan, M., Satapathy, R., Cambria, E., and Magnenat-Thalmann, N. (2019). “Can a humanoid robot be part of the organizational workforce? A user study leveraging sentiment analysis,” in 2019 28th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 1–7.
Mizumaru, K., Satake, S., Kanda, T., and Ono, T. (2019). “Stop doing it! approaching strategy for a robot to admonish pedestrians,” in 2019 14th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 449–457.
Mohamed, Y., and Lemaignan, S. (2021). “Ros for human-robot interaction,” in 2021 IEEE/RSJ international conference on intelligent robots and systems (IROS) (New York, NY: IEEE), 3020–3027.
Mondada, F., Bonani, M., Riedo, F., Briod, M., Pereyre, L., Rétornaz, P., et al. (2017). Bringing robotics to formal education: the thymio open-source hardware robot. IEEE Robotics Automation Mag. 24, 77–85. doi:10.1109/mra.2016.2636372
Naik, L., Palinko, O., Bodenhagen, L., and Krüger, N. (2021). “Multi-modal proactive approaching of humans for human-robot cooperative tasks,” in 2021 30th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 323–329.
Nakanishi, J., Hazama, T., Baba, J., Song, S., Yoshikawa, Y., and Ishiguro, H. (2021). “Exploring possibilities of social robot’™s interactive services in the case of a hotel room,” in 2021 30th IEEE international conference on robot and human interactive communication (RO-MAN) (IEEE), 925–930.
Nasir, J., Norman, U., Johal, W., Olsen, J. K., Shahmoradi, S., and Dillenbourg, P. (2019). “Robot analytics: what do human-robot interaction traces tell us about learning?,” in 2019 28th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 1–7.
Nasir, J., Oppliger, P., Bruno, B., and Dillenbourg, P. (2022). “Questioning wizard of oz: effects of revealing the wizard behind the robot,” in 2022 31st IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 1385–1392.
Odabasi, C., Graf, F., Lindermayr, J., Patel, M., Baumgarten, S. D., and Graf, B. (2022). “Refilling water bottles in elderly care homes with the help of a safe service robot,” in 2022 17th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 101–110.
Özgür, A., Lemaignan, S., Johal, W., Beltran, M., Briod, M., Pereyre, L., et al. (2017). Cellulo: versatile handheld robots for education. New York, NY, USA: Association for Computing Machinery, 119–127.
Paepcke, S., and Takayama, L. (2010). “Judging a bot by its cover: an experiment on expectation setting for personal robots,” in 2010 5th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 45–52.
Page, M. J., McKenzie, J. E., Bossuyt, P. M., Boutron, I., Hoffmann, T. C., Mulrow, C. D., et al. (2021). The prisma 2020 statement: an updated guideline for reporting systematic reviews. bmj 372, n71. doi:10.1136/bmj.n71
Palinko, O., Fredskild, T. U., Andersen, E. T., Heidtmann, C., Sørensen, A. R., Junge, R. P., et al. (2021). “A robotic interface for motivating and educating proper hand sanitization using speech and gaze interaction,” in 2021 30th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 763–769.
Pandey, A. K., and Gelin, R. (2018). A mass-produced sociable humanoid robot: pepper: the first machine of its kind. IEEE Robotics Automation Mag. 25, 40–48. doi:10.1109/mra.2018.2833157
Park, H. W., Grover, I., Spaulding, S., Gomez, L., and Breazeal, C. (2019). A model-free affective reinforcement learning approach to personalization of an autonomous social robot companion for early literacy education. Proc. AAAI Conf. Artif. Intell. 33, 687–694. doi:10.1609/aaai.v33i01.3301687
Rajavenkatanarayanan, A., Nambiappan, H. R., Kyrarini, M., and Makedon, F. (2020). “Towards a real-time cognitive load assessment system for industrial human-robot cooperation,” in 2020 29th IEEE international conference ON robot AND human interactive communication (Ro-Man) (New York, NY: IEEE), 698–705.
Ramachandran, A., Sebo, S. S., and Scassellati, B. (2019). Personalized robot tutoring using the assistive tutor pomdp (at-pomdp). Proc. AAAI Conf. Artif. Intell. 33, 8050–8057. doi:10.1609/aaai.v33i01.33018050
Ramnauth, R., Adéníran, E., Adamson, T., Lewkowicz, M. A., Giridharan, R., Reiner, C., et al. (2022). “A social robot for improving interruptions tolerance and employability in adults with asd,” in 2022 17th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 4–13.
Riek, L. D. (2012). Wizard of oz studies in hri: a systematic review and new reporting guidelines. J. Human-Robot Interact. 1, 119–136. doi:10.5898/jhri.1.1.riek
Rossi, S., Cimmino, T., Matarese, M., and Raiano, M. (2019). “Coherent and incoherent robot emotional behavior for humorous and engaging recommendations,” in 2019 28th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 1–6.
Rudenko, I., Norman, U., Maure, R., Rudenko, A., Weinberger, N., Krebs, F., et al. (2024). Drawings for insight on preschoolers’ perception of robots. Companion 2024 ACM/IEEE Int. Conf. Human-Robot Interact. 920–924. doi:10.1145/3610978.3640608
Sackl, A., Pretolesi, D., Burger, S., Ganglbauer, M., and Tscheligi, M. (2022). “Social robots as coaches: how human-robot interaction positively impacts motivation in sports training sessions,” in 2022 31st IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 141–148.
Salomons, N., Pineda, K. T., Adéjàre, A., and Scassellati, B. (2022a). ““We make a great team!”: aduats with low prior domain knowledge learn more from a peer robot than a tutor robot,” in 2022 17th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 176–184.
Salomons, N., Wallenstein, T., Ghose, D., and Scassellati, B. (2022b). “The impact of an in-home co-located robotic coach in helping people make fewer exercise mistakes,” in 2022 31st IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 149–154.
Schuler, D., and Namioka, A. (1993). Participatory design: principles and practices. Boca Raton, USA: CRC Press.
Shaikewitz, L., Wu, Y., Belkhale, S., Grannen, J., Sundaresan, P., and Sadigh, D. (2023). “In-mouth robotic bite transfer with visual and haptic sensing,” in 2023 IEEE international conference on robotics and automation (ICRA) (New York, NY: IEEE), 9885–9895.
Shibata, T., and Wada, K. (2011). Robot therapy: a new approach for mental healthcare of the Elderly–a mini-review. Gerontology 57, 378–386. doi:10.1159/000319015
Shute, V. J., Gawlick, L. A., and Gluck, K. A. (1998). Effects of practice and learner control on short-and long-term gain and efficiency. Hum. Factors 40, 296–310. doi:10.1518/001872098779480424
Stals, S., Voysey, I., and Baillie, L. (2024). Let’s make this fun!: activities to motivate children and teens to complete questionnaires. New York, NY, USA: Association for Computing Machinery, 1008–1012.
Steinfeld, A., Jenkins, O. C., and Scassellati, B. (2009). The oz of wizard: simulating the human for interaction research. New York, NY, USA: Association for Computing Machinery, 101–108.
Takada, R., Hoshimure, K., Iwamoto, T., and Baba, J. (2021). “Pop cart: product recommendation system by an agent on a shopping cart,” in 2021 30th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 59–66.
Tennent, H., Shen, S., and Jung, M. (2019). “Micbot: a peripheral robotic object to shape conversational dynamics and team performance,” in 2019 14th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 133–142.
Tolksdorf, N. F., and Rohlfing, K. J. (2020). “Parents’™ views on using social robots for language learning,” in 2020 29th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 634–640.
Tozadore, D. C., Wang, C., Marchesi, G., Bruno, B., and Dillenbourg, P. (2022). “A game-based approach for evaluating and customizing handwriting training using an autonomous social robot,” in 2022 31st ieee international conference on robot and human interactive communication (ro-man) (New York, NY: IEEE), 1467–1473.
Tuisku, O., Pekkarinen, S., Hennala, L., and Melkas, H. (2019). “Robots do not replace a nurse with a beating heart” the publicity around a robotic innovation in elderly care. Inf. Technol. People 32, 47–67. doi:10.1108/itp-06-2018-0277
Uluer, P., Kose, H., Oz, B. K., Aydinalev, T. C., and Barkana, D. E. (2020). “Towards an affective robot companion for audiology rehabilitation: how does pepper feel today?,” in 2020 29th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 567–572.
Unnikrishnan, R., Deshmukh, A., Ramesh, S., Babu, S. K., Anitha, P., and Bhavani, R. R. (2019). “Design and perception of a social robot to promote hand washing among children in a rural Indian school,” in 2019 28th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 1–6.
Velentza, A.-M., Fachantidis, N., and Lefkos, I. (2021). “Human or robot university tutor? Future teachers’™ attitudes and learning outcomes,” in 2021 30th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 236–242.
Vogt, P., van den Berghe, R., De Haas, M., Hoffman, L., Kanero, J., Mamus, E., et al. (2019). “Second language tutoring using social robots: a large-scale study,” in 2019 14th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 497–505.
Wang, X., Huang, X., Lin, Y., Zhou, L., Sun, Z., and Xu, Y. (2021). “Design of an ssvep-based bci stimuli system for attention-based robot navigation in robotic telepresence,” in 2021 IEEE/RSJ international conference on intelligent robots and systems (IROS) (New York, NY: IEEE), 4126–4131.
Welfare, K. S., Hallowell, M. R., Shah, J. A., and Riek, L. D. (2019). “Consider the human work experience when integrating robotics in the workplace,” in 2019 14th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 75–84.
Westlund, J. K., Gordon, G., Spaulding, S., Lee, J. J., Plummer, L., Martinez, M., et al. (2016). “Lessons from teachers on performing hri studies with young children in schools,” in 2016 11th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 383–390.
Wurhofer, D., Meneweger, T., Fuchsberger, V., and Tscheligi, M. (2015). “Deploying robots in a production environment: a study on temporal transitions of workers’™ experiences,” in Human-computer Interaction–INTERACT 2015: 15Th IFIP TC 13 international conference, bamberg, Germany, September 14-18, 2015, proceedings, part III 15 (Cham, Switzerland: Springer, Cham), 203–220.
Yadollahi, E., Couto, M., Dillenbourg, P., and Paiva, A. (2022). “Motivating children to practice perspective-taking through playing games with cozmo,” in 2022 31st IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 1482–1489.
Yamamoto, M., Hu, Y., Coronado, E., and Venture, G. (2021). “Impression evaluation of robot’™s behavior when assisting human in a cooking task,” in 2021 30th IEEE international conference on robot and human interactive communication (RO-MAN) (New York, NY: IEEE), 743–748.
Ye, R., Xu, W., Fu, H., Jenamani, R. K., Nguyen, V., Lu, C., et al. (2022). “Rcare world: a human-centric simulation world for caregiving robots,” in 2022 IEEE/RSJ international conference on intelligent robots and systems (IROS) (New York, NY: IEEE), 33–40.
Zaga, C., Lohse, M., Truong, K. P., and Evers, V. (2015). “The effect of a robot’™s social character on children’™s task engagement: peer versus tutor,” in Social robotics: 7th International conference, ICSR 2015, Paris, France, October 26-30, 2015, proceedings 7 (Cham, Switzerland: Springer, Cham), 704–713.
Zhang, A. W., Lin, T.-H., Zhao, X., and Sebo, S. (2023). Ice-breaking technology: robots and computers can foster meaningful connections between strangers through in-person conversations. New York, NY, USA: Association for Computing Machinery, 1–14.
Zhao, Z., and McEwen, R. (2022). ““Let’s read a book together”: A lang-term study on the usage of pre-school children with their home companion robot,” in 2022 17th ACM/IEEE international conference on human-robot interaction (HRI) (New York, NY: IEEE), 24–32.
Keywords: human-robot interaction, socially assistive robotics, level of autonomy, artificial intelligence, robot teleoperation, Wizard of Oz, transparency, systematic review
Citation: Maure R and Bruno B (2025) Autonomy in socially assistive robotics: a systematic review. Front. Robot. AI 12:1586473. doi: 10.3389/frobt.2025.1586473
Received: 02 March 2025; Accepted: 04 August 2025;
Published: 19 September 2025.
Edited by:
Hifza Javed, Honda Research Institute USA Mountain View, United StatesReviewed by:
Sarah Gillet, Royal Institute of Technology, SwedenBaijun Xie, George Washington University, United States
Copyright © 2025 Maure and Bruno. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Romain Maure, cm9tYWluLm1hdXJlQGtpdC5lZHU=