 Aida Haghighi1*
Aida Haghighi1* Morteza Cheraghi2
Morteza Cheraghi2 Jérôme Pocachard3Valérie Botta-Genoulaz4Sabrina Jocelyn5Hamidreza Pourzarei6
Jérôme Pocachard3Valérie Botta-Genoulaz4Sabrina Jocelyn5Hamidreza Pourzarei6- 1School of Occupational and Public Health, Faculty of Community Services, Toronto Metropolitan University, Toronto, ON, Canada
- 2Department of Mechanical, Industrial and Mechatronics Engineering, Toronto Metropolitan University, Toronto, ON, Canada
- 3National Education, Engineering Sciences, Lycée Henri Loritz, Nancy, France
- 4INSA Lyon, Université Lumière Lyon 2, Universite Claude Bernard Lyon 1, Université Jean Monnet Saint-Etienne, DISP UR4570, Villeurbanne, France
- 5Institut de Recherche Robert-Sauvé en Santé et en Sécurité du Travail (IRSST), Montréal, QC, Canada
- 6Systems Engineering Department, École de technologie supérieure – ETS, Montreal, QC, Canada
Research organizations and academics often seek to map the development of scientific fields, identify research gaps, and guide the direction of future research. In cobot-related research, the scientific literature consulted does not propose any comprehensive research agenda. Moreover, cobots, industrial robots inherently designed to collaborate with humans, bring with them emerging issues. To solve them, interdisciplinary research is often essential (e.g., combination of engineering, ergonomics and biomechanics expertise to handle safety challenges). This paper proposes an exhaustive study that employs a scoping review and bibliometric analysis to provide a structured macro perspective on the developments, key topics, and trends in cobot research for industry. A total of 2,195 scientific publications were gained from the Web of Science database, and a thorough selection process narrowed them down to 532 papers for comprehensive analysis. Descriptive statistics were employed to analyze bibliometric measures, highlighting publication trends, leading journals, the most productive institutions, engaged countries, influential authors, and prominent research topics. Co-authorship and bibliographic couplings were also examined. Through a co-occurrence analysis of terms, the content and research objectives of the papers were systematically reviewed and lead to a univocal categorization framework. That categorization can support organizations or researchers in different cobotics (collaborative robotics) fields by understanding research developments and trends, identifying collaboration opportunities, selecting suitable publication venues, advancing the theoretical and experimental understanding of automatic collaborative systems, and identifying research directions and predicting the evolution of publication quantity in cobotics.
1 Introduction
Human-Robot collaboration is a current industrial trend following the development of new enabling technologies in the scope of Industry 4.0 (Bortolini et al., 2017; Rosin et al., 2020; Vysocky and Novak, 2016). Humans and robots can work jointly if sufficient safety is guaranteed, leading to the concept of cobots first introduced in (Colgate et al., 1996). Initially, that word “cobot” referred to intrinsically passive manipulators (Colgate et al., 1996). Nowadays, the term “cobot” refers to active manipulators that are industrial robots in the sense of ISO 10218-1:2025 (ISO, 2025a), inherently designed to physically interact with humans or share a same workspace, thanks to one or more of the three following methods: 1) hand-guided control (HGC), 2) speed and separation monitoring (SSM), or 3) power and force limiting (PFL) as described in ISO 10218-2:2025 (ISO, 2025b). That interaction or that space sharing is possible if the risks assessed, associated with the collaborative application, are deemed acceptable for the humans in the vicinity of the cobot. When that collaboration is possible, one can benefit from the advantages of both, thereby transcending the conventional division of labor that often mandates robots to be confined in safety cages, away from human workers. In a collaborative system, humans contribute flexibility, intelligence, cognitive skills, and the capacity to tackle unforeseen challenges, whereas cobots excel in executing repetitive and monotonous tasks with accuracy, agility, and strength (Paliga, 2022). This new technology, cobot, presents an opportunity to reinvent manufacturing systems, leading to better efficiency while improving working conditions (Schmidtler et al., 2015), and possibly even offering benefits for environmental considerations. For example, Alvarez-de-los-Mozos et al. (2020) utilized a cobot for recycling electrical and electronic waste.
As shown in the two subsequent paragraphs below, various papers have been dedicated to reviewing and discussing the existing literature on human-robot interaction in general or on cobots specifically. The aim of these papers is to provide valuable insights into specific topics such as safety in workspaces where humans and cobots interact with each other (Bi et al., 2022; Bi et al., 2021; Bogue, 2017; Broum and Simon, 2020; Chemweno et al., 2020; Kumar et al., 2020; Li et al., 2023; Valori et al., 2021), terminology in the safety of cobotics (Vicentini, 2020), human awareness during collaboration (Grushko et al., 2021), physical and cognitive ergonomics in cobotic workstations (Cardoso et al., 2021), collaborative robotics applications (Montini et al., 2024; Liu et al., 2024a), developments in gripper technologies for cobots (Bogue, 2016a), task planning and programming (El Zaatari et al., 2019; Tsarouchi et al., 2016), designing workplaces where humans and cobots interact with each other (Simoes et al., 2022), and learning methodologies for human-robot collaboration (Mukherjee et al., 2022).
For example, Gualtieri et al. (2021a) conducted a systematic literature review on both safety and ergonomics in cobotics for industry. Similarly, Patil et al. (2023) systematically reviewed safety and ergonomics in cobotics and classified the literature into four sub-categories: contact avoidance and contact detection and mitigation for safety category and physical ergonomics and cognitive ergonomics for ergonomics category. Storm et al. (2022) reviewed safety along with the mental health and wellbeing of workers near cobots. Lu L. et al. (2022) utilized a systematic literature review methodology to identify robot-related factors affecting cobot-related workers’ mental stress or safety awareness. They discussed methods to measure mental stress and safety awareness during human-robot collaboration. Berx et al. (2022a) reviewed literature on cobotics to identify and classify risk factors in human-robot collaboration. Vicentini (2021) provided an extensive review on cobotics, focusing on safety and task planning. Also, valuable information on sensors and actuators for cobots can be found in Bogue et al. (2015), Ogenyi et al. (2021). Villani et al. (2018) carried out a review on cobots, focusing on issues related to physical and cognitive interaction. The issues related to safety, robot programming, sensing technologies for human-robot interaction, and industrial applications of cobotics are explicitly discussed in that paper. While those studies focused on specific topics or challenges in cobotics, the current paper covers scientific articles dealing with all kinds of topics and challenges related to cobotics.
Hentout et al. (2019) studied literature on human-robot interaction in cobotics for industry from 2008 to 2017. They attempted to classify the content of the published works, resulting in a stimulating classification with seven categories, each broken down into several subcategories. Similarly, Matheson et al. (2019) did a practical study on human-robot collaboration in manufacturing from 2009 until 2018, including a remarkable cobot market analysis. They classified the publications into three topics categories (i.e., productivity, safety, human-robot interaction), pointed out some limitations of their equivocal categories. Proia et al. (2022) carried out a systematic review of the control techniques used in cobotics. They classified research works into three main categories: safety, ergonomics, and efficiency. They further discussed and categorized them into sub-categories within each main category to highlight the types of control systems. In addition, Borregan-Alvarado et al. (2024) proposed a model to identify and predict of research topics in collaborative robotics and human-robot interaction technologies. That model is based on scientific articles on human-robot interaction for the 2020–2021 period. The current paper not only covers a broader and more recent time frame (1996–2022), but also provides a clear and consistent univocal categorization framework based on key topics identified through an in-depth bibliometric analysis. Also, given the need to support cobotics researchers in identifying the most active research areas, and relevant journals for publication, as well as opportunities for collaboration to tackle the emerging challenges associated with cobotics, this paper performs a bibliometric analysis on two levels: (1) all cobot-related publications, and (2) specific research fields within cobotics.
As discussed above, the growing attention towards cobots has motivated researchers to generate various review papers in cobotics. Although the previous studies have offered valuable insights, there is a lack of a comprehensive quantitative and qualitative analysis of the current state-of-the-art in cobotics. To address this gap, the present study aims to carry out a thorough review and bibliometric analysis of studies dedicated to cobotics for industry. In summary, this study offers the following specific novel contributions:
(i) Covering an extensive timeframe, it reviews over 25 years of scientific literature since the term “cobot” was first coined in 1996, capturing the evolution and maturation of the field.
(ii) It includes scientific literature dealing with all kinds of topics and challenges related to cobotics.
(iii) It conducts an in-depth bibliometric analysis of cobotics-related literature for industry on two levels: (1) all cobot-related publications, and (2) specific research fields within cobotics. This analysis examines publication trends, leading journals, productive institutions, engaged countries, influential authors, and emerging topics, serving as a critical reference for academics and industry professionals (e.g., engineers) navigating the rapidly evolving field of cobotics.
(iv) It identifies key research directions and predicts the trajectory of publication growth in this domain.
(v) It introduces a clear and consistent univocal categorization framework encompassing six main research topics and 25 subcategories, providing a valuable roadmap for researchers exploring diverse aspects related to cobotics, including safety in collaborative applications, cobot deployment in industrial settings, task optimization between humans and robots, communication between humans and cobots, and cobot actuating systems.
By providing both a structured understanding of existing research and insights into future trends, this work equips scholars and practitioners with the necessary guidance to drive advancements in cobotics.
Besides this introductory section, this paper is organized as follows: the methodology is presented in Section 2, while the results and discussions of quantitative and qualitative analysis of cobot-related research for industrial settings derived from the literature are presented in Sections 3, 4. The final section presents the conclusions and agenda for future research.
2 Methodology
The Preferred Reporting Items for Systematic Reviews and Meta-Analyses extension for Scoping Reviews (PRISMA-ScR) (Tricco et al., 2018) guided this scoping review in the following steps.
2.1 Research questions
This paper aims to address the following main research questions: (i) What are the predominant research interests from the first cobot, i.e., 1996, to the end of 2022, and how can these be systematically classified?; (ii) which research topics in cobotics have garnered the most attention, and which studies and journals are considered most influential in this field?; (iii) who are the leading authors and which countries have made the most significant contributions to cobotics research?; (iv) how has the publication quantity in cobotics evolved over the years, and what trends can be predicted for future research output in this field?; and (v) what are the existing research gaps in cobotics, and what future research directions can be identified through a comprehensive scoping review and bibliometric analysis?
2.2 Identifying relevant studies
First, a comprehensive search strategy was formulated to access a diverse array of articles for consideration. This search was carried out in the ISI Web of Science (WoS), recognized as one of the premier repositories in research, covering the earliest date available in the database up to, and including, December 2022. The search string used was “collaborative robot*” OR cobot * in either the title, abstract, or author keywords fields. Due to the extensive nature of the research conducted, our objective was to identify as many relevant papers (including journal articles, reviews, and conference proceedings) as possible, focusing solely on cobots, totaling 2,195 records. That two-word search string was chosen after trying broader strategies leading to more records. Those broader strategies, including for example, the additional terms OR “human robot interaction” OR HRI multiplied the number of records by at least 40. However, a significant portion of those records was not related to cobots, as per its meaning presented in Section 1. Indeed, research on human-robot interaction or collaboration is also dealt with in the literature for industrial robots that are not inherently designed to interact with humans or for service robots for example. Adding other keywords made the amount of articles to screen impossible to assess humanly in a timely manner by the research assistants, due to limited staff, as well as time and budget constraints. Because of that, and to minimize the number of papers not related to cobots in an industrial context, the paper focuses only on the two-keyword strategy. Analyzing the papers started in 2023 and finished in 2024. The writing of the paper followed in 2025. Figure 1 illustrates the process of the PRISMA-ScR guideline for selecting the relevant literature and the number of papers handled at each part for the chosen strategy.
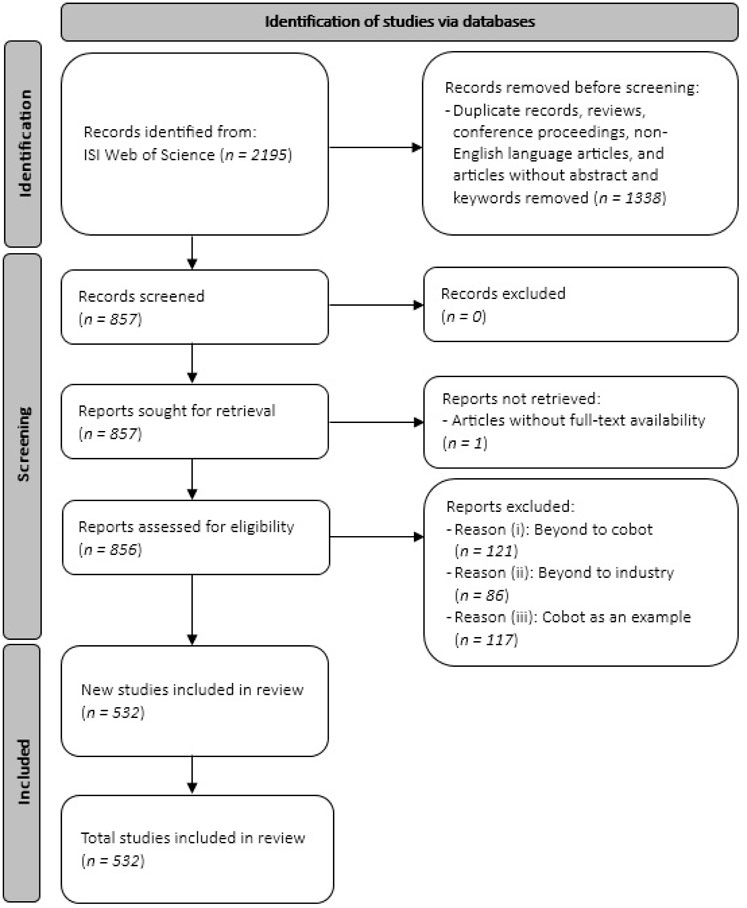
Figure 1. PRISMA-ScR process for selecting the literature.
2.3 Selecting studies
As can be seen in Figure 1, for conducting a scoping review, first, the focus was narrowed only to journal articles with abstracts, keywords, and DOIs, resulting in 857 documents. One record out of these 857 documents was excluded due to the reason of without full-text availability. Then, a screening process was used in order to ensure the exclusion of irrelevant articles. To minimize threats to validity, one team member conducted the screening process while another independently validated their work. Any disagreements during the screening were resolved through discussion between the two team members to reach a consensus and make a final decision. This screening process resulted in the exclusion of 323 papers, based on three specific exclusion criteria (see Figure 1):
(i) Beyond to cobot: 121 papers matched the search keywords but had a different definition from that provided in the introduction. Interestingly, among these articles, 20 focused on various types of robots (often aerial and/or terrestrial robots, and swarms of robots) working collaboratively, but without human.
(ii) Beyond to industry: 86 articles addressed cobots but in fields outside of industry. For example, among these articles, 54 were related to the medical field.
(iii) Cobot as an example: 117 articles occasionally mentioned cobots alongside other Industry 4.0 technologies or used cobots as a testing device for other equipment.
After this screening process, 532 articles were validated for final analysis in this research.
2.4 Charting the data
In this paper, MS Excel and VOSviewer were used for the bibliometric analysis of the 532 retrieved papers. VOSviewer employs the VOS (Visualization of Similarities) mapping method to create networks where the distances between items indicate their degree of similarity. The VOS clustering technique categorizes topics into distinct clusters, each marked with a different color (van Eck and Waltman, 2010; van Eck and Waltman, 2007). These techniques allow for the analysis of papers in terms of co-authorship, co-occurrence of terms in the titles, abstracts, and keywords, as well as the bibliographic couplings of research institutions, countries, or publication sources. Thanks to these features, VOSviewer has been widely applied in the bibliometric analysis in various robotics fields (Wu et al., 2024; Wang J. et al., 2023; Mudhivarthi and Thakur, 2022; Long et al., 2024; Liu and Son, 2024; Li W-S. et al., 2021; Chu et al., 2021). Based on the key topics identified through the bibliometric analysis, a univocal categorization framework was proposed. Two team members reviewed the papers, classifying each to a category based on its main research objective. Any discrepancies were resolved through discussion.
2.5 Synthesizing and reporting the results
The research topic categories were formed and organized by reviewing the papers and their research topics. Furthermore, MS Excel and VOSviewer were used again for bibliometric analysis on each category to gain more specific results for each research topics.
3 Bibliometric analysis–Results and discussions
In this section, we present and discuss the results from the bibliometric analysis of the 532 retrieved papers. In general, the visualizations are interpreted as follows: the size of the spheres and the font of the labels represent the number of occurrences, the colors represent clusters (i.e., a set of closely related items), and the distance between two spheres indicate their relatedness and similarity.
3.1 Publication trends
The number of publications is an important indicator for measuring the development trends within a research domain. By analyzing the number of publications over time, one can easily infer research activity levels and trends, which in turn allows for the estimation of future activity levels (Yang et al., 2019). Figure 2 presents the annual and cumulative number of publications focused on the topic of cobotics for industry. It shows that there were only 14 publications before or in 2015. This period can be considered the initial stage, where little research explicitly focused on cobot in industrial settings. Since 2016, the number of publications in this field has increased significantly. Furthermore, the cumulative number of publications approximately follows an exponential growth pattern, as calculated by Equation 1:
where
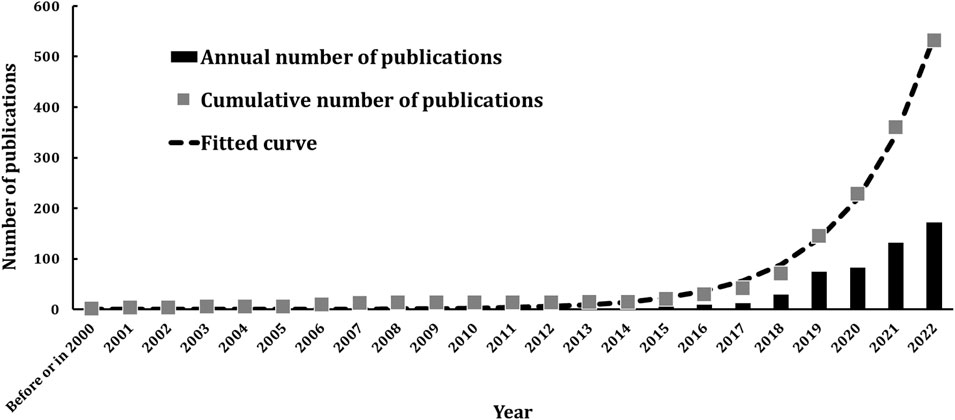
Figure 2. Annual and cumulative number of publications.
The Coefficient of Determination (
where
The model demonstrates a high goodness-of-fit with an
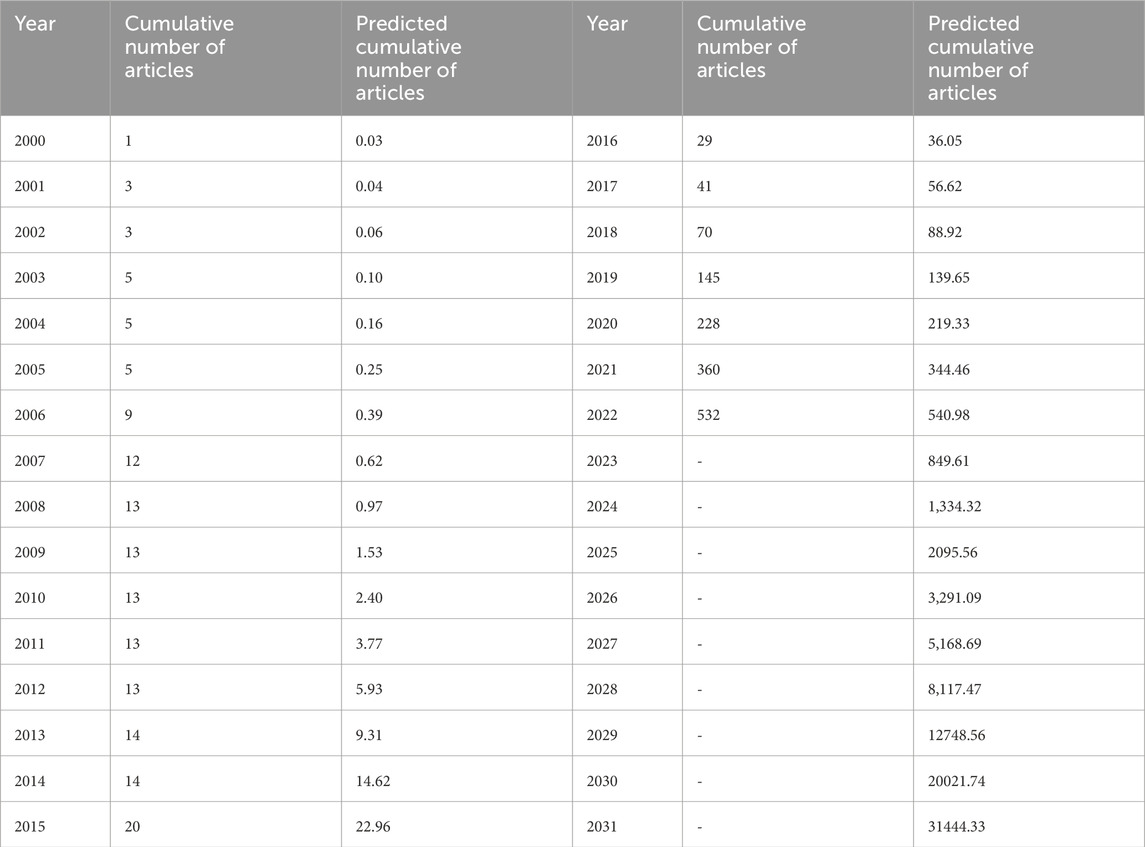
Table 1. Predicted cumulative number of publications.
3.2 Geographical and institutional distribution and cooperation
The geographical span of a research field indicates its versatility and global popularity. The more institutions/countries involved, the more significant the research field. This aspect is explored in the following subsections.
3.2.1 Contributing countries
The 532 retrieved papers come from 59 distinct countries (see Table 2; Figure 3). Figure 3 illustrates the bibliographic coupling among these countries. Bibliographic coupling occurs when publications from two countries reference works from a third country. Each country is represented by a sphere, with the size of the sphere and its label indicating the magnitude of the contribution; larger spheres and labels denote greater contributions. The thickness of the arcs connecting spheres represents bibliographic connections while the colors indicate collaboration clusters of countries.
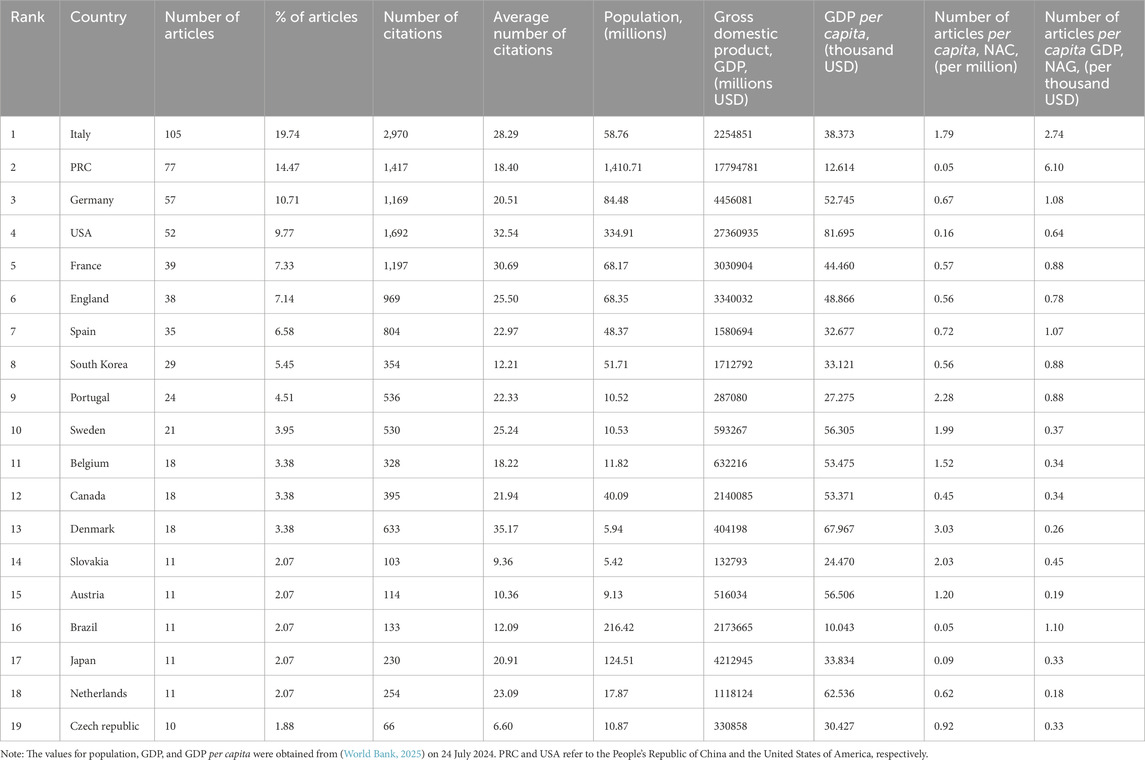
Table 2. Top contributing countries to the field of cobotics for industry.
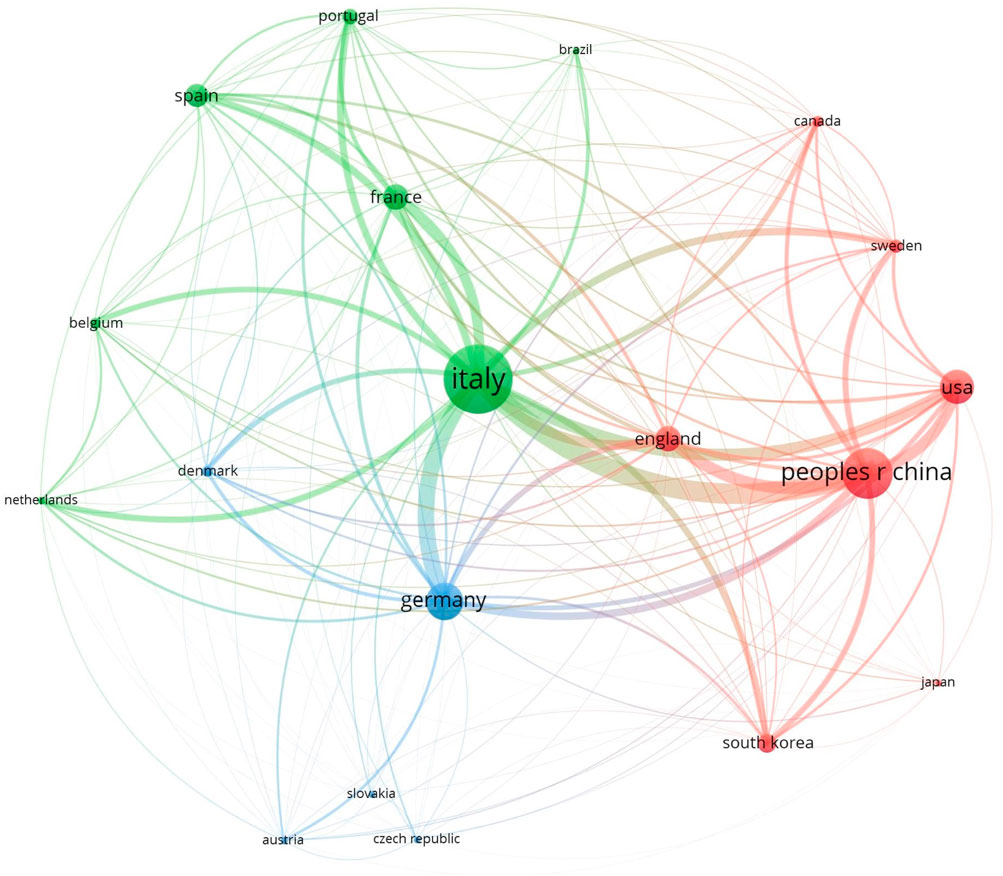
Figure 3. Bibliographic coupling among countries with at least 10 published papers.
Table 2 shows that Italy leads in the number of publications with 105, accounting for approximately 15 percent, followed by the PRC with 77 publications, or about 11 percent. It also indicates that 19 countries have contributed to the advancement of the cobotics field with at least 10 publications each. All Group of Seven (G7) countries—Canada, France, Germany, Italy, Japan, England, and the USA—are active in this research area. Among BRICS countries—Brazil, Russia, India, the PRC, South Africa, Iran, Egypt, Ethiopia, and the United Arab Emirates (UAE)— the PRC is the leading contributor. Also, articles from Thailand, Switzerland, and Egypt have garnered significant attention in the cobot research community, with average citation counts of 112, 52.5, and 39.5, respectively, despite having only 2, 8, and 2 publications. The high average citation rates, combined with the relatively few publications from these countries, highlight the sensitivity of this metric; a small number of highly cited papers can significantly influence the average citation counts when the total number of publications is low.
To more effectively assess a country’s research productivity in a specific area, the number of articles per capita,
where GDP per capita is given by Equation 7.
The
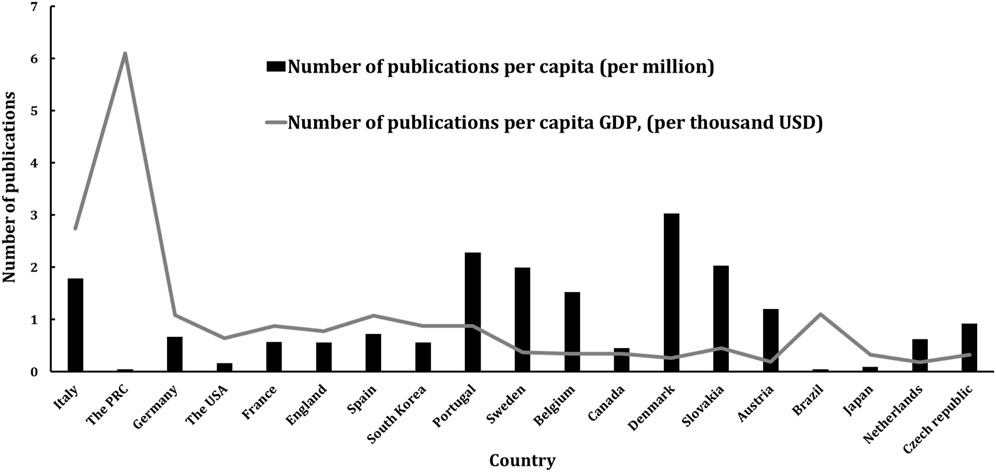
Figure 4. Research efficiency indices of top contributing countries.
3.2.2 Research institutions
An analysis reveals that 570 research institutions have contributed to the 532 retrieved articles advancing the field of cobotics for industry. Among these, 21 institutions have published six or more papers. As shown in Table 3, the most productive institution in cobot research is the Politecnico di Milano, with 16 publications. This is followed by the Politecnico di Torino with 12 publications, and the University of Padua and the University of Coimbra, each with 11 publications. Among the 21 institutions publishing six or more papers, the University of Modena and Reggio Emilia stands out, having attracted the most attention from scholars based on both the total number of citations and the average number of citations. Notably, 7 of the top 21 institutions are from Italy, highlighting the country’s dominance in this research area. Figure 5 represents the bibliographic coupling among research institutions. Bibliographic coupling occurs when publications from two institutions reference works from a third common institution. Each research institution is represented by a sphere, with the size of the sphere and its label indicating the magnitude of the institution’s contribution. The larger the sphere and label, the greater the contribution. The colors represent clusters of institutions, while the thickness of the arcs between spheres represents the strength of the bibliographic coupling.
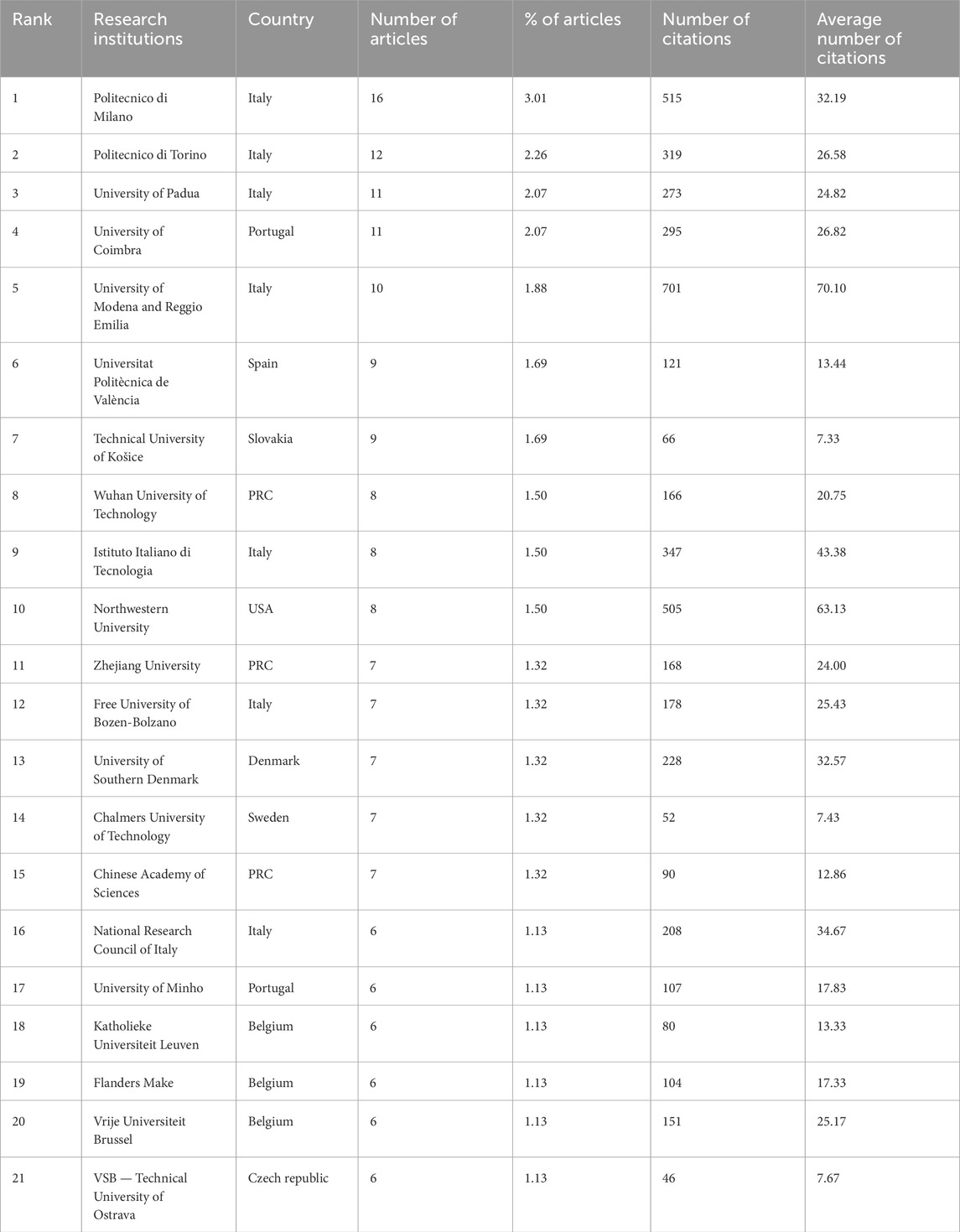
Table 3. Top contributing institutions to the field of cobotics for industry.
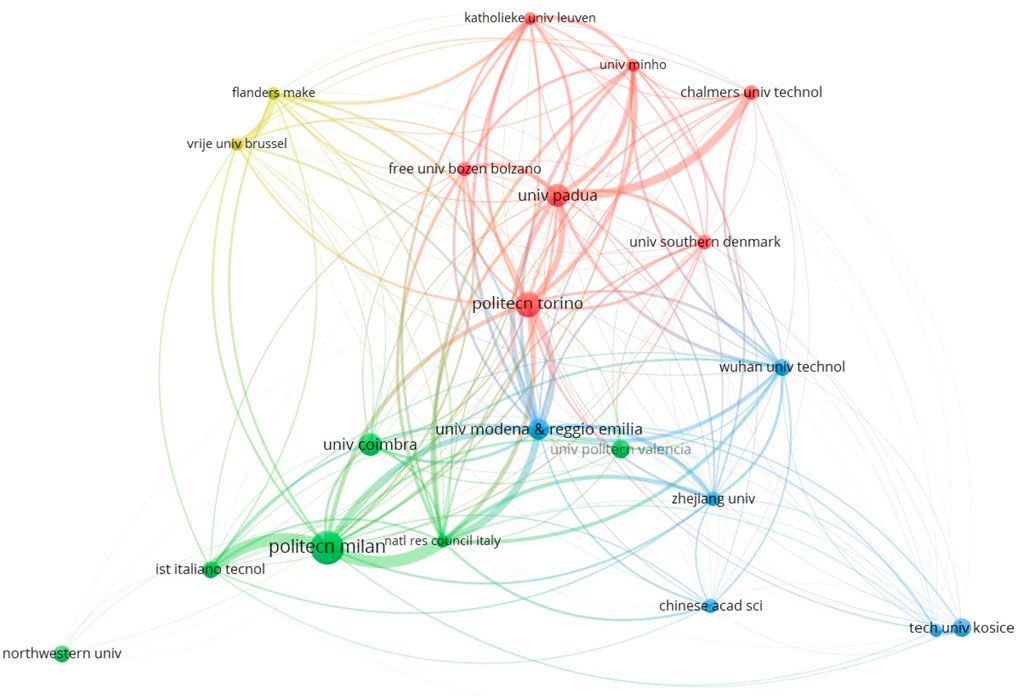
Figure 5. Bibliographic coupling among research institutions with at least six published papers.
3.3 Potential sources
The analysis of publication sources is essential to identify the main journals in a research field, to help researchers find relevant literature and select the right journals for their work. The analysis of 532 selected papers revealed that they came from 156 different journals. Table 4 lists journals that have published more than 10 papers on cobotics for industry. The journal “Robotics and Computer-Integrated Manufacturing” is the leading source, with 35 publications, followed by “IEEE Robotics and Automation Letters” with 33 papers, “Applied Sciences-Basel” with 29 papers, and the “International Journal of Advanced Manufacturing Technology” with 26 papers. Regarding citations, “Robotics and Computer-Integrated Manufacturing” ranks first with 1,602 citations, followed by the “International Journal of Advanced Manufacturing Technology” with 760 citations, and “IEEE Robotics and Automation Letters” with 734 citations. However, papers published in “Mechatronics” attracted the most attention on average, with 62.09 citations per paper, while “Robotics and Computer-Integrated Manufacturing” ranks second with 45.77 average citations. Figure 6 illustrates the bibliographic coupling among various publication sources active in the cobotics with at least 10 papers. The size of each sphere indicates the journal’s relative strength in publishing cobotics papers, the color represents clusters of journals, and the thickness of the arcs between journals indicates the strength of their bibliographic coupling.
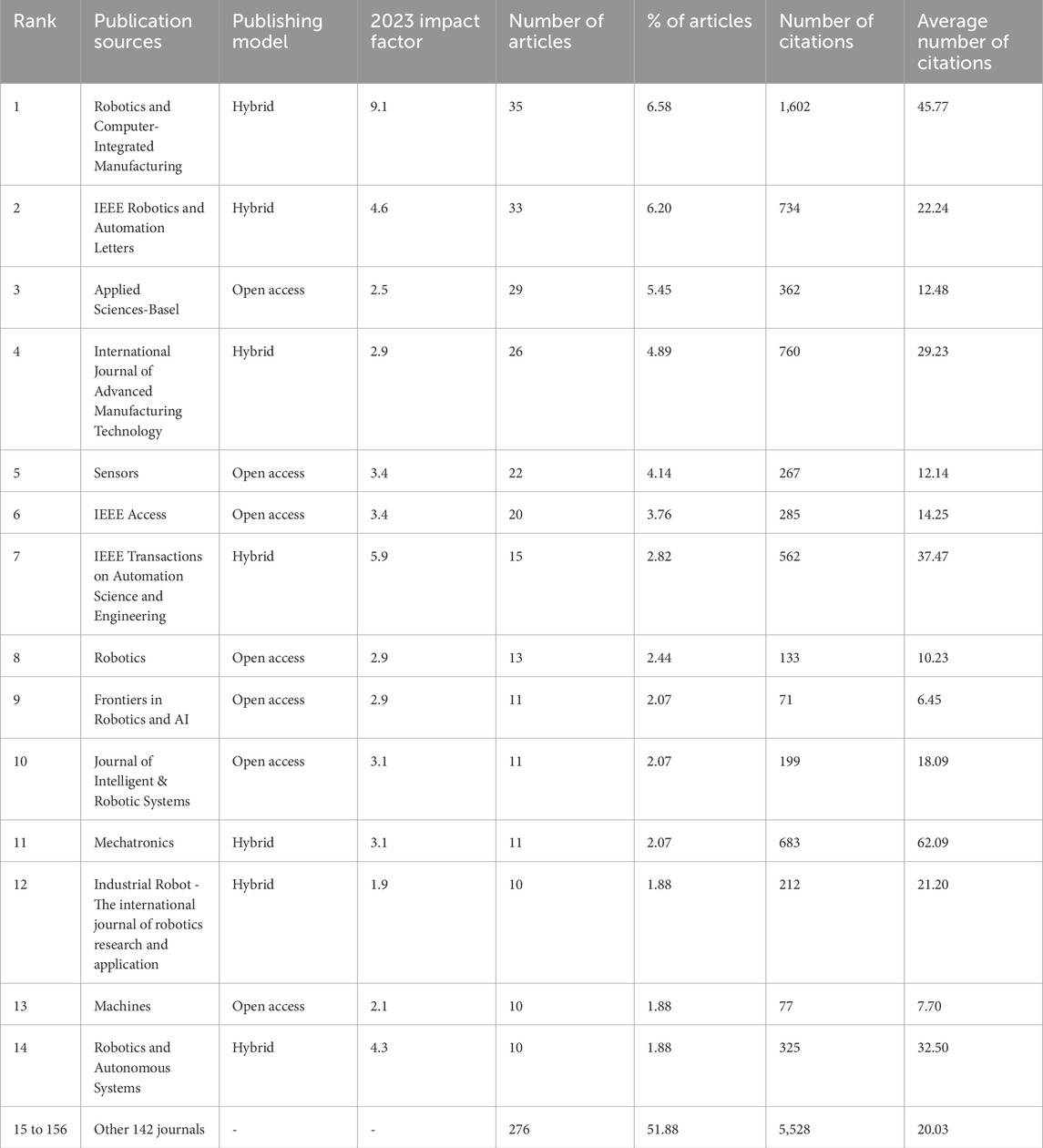
Table 4. Contributions of publication sources to the field of cobotics for industry.
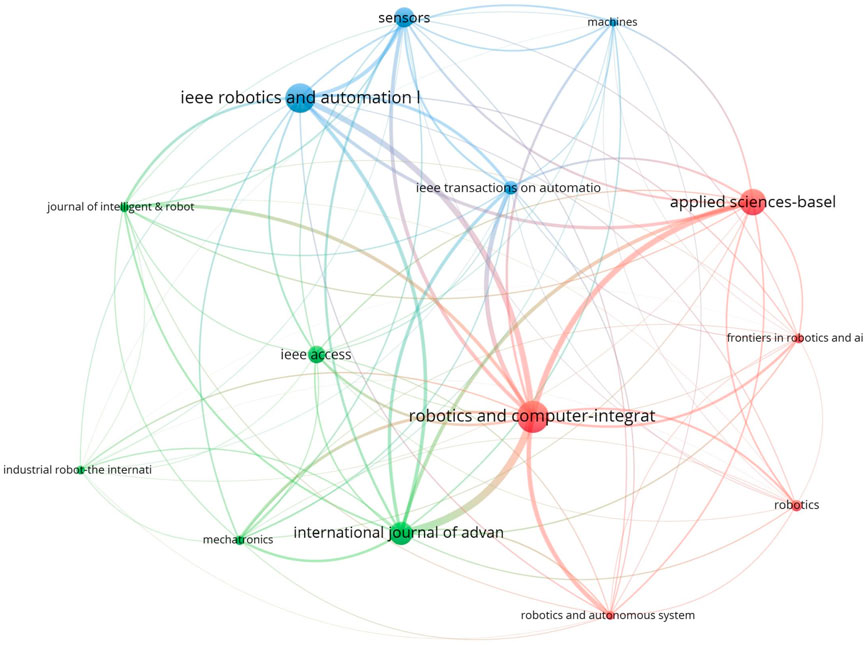
Figure 6. Bibliographic coupling among publication sources with at least 10 papers.
3.4 The most productive and influential authors and their cooperation network
Analyzing the number of publications and citations of authors, and mapping co-authorship relationship, allows for the identification of the most productive and influential authors and the most prominent research groups in the field, according to the PRISMA-ScR process applied for literature selection (see Figure 1). This information is invaluable for researchers seeking collaboration and insights from leading experts. The 532 retrieved papers were contributed by 1704 authors, with 26 authors having at least 5 publications, and 26 authors having a minimum of 200 citations (see Table 5). Understanding authors’ contributions to the cobotics research field requires evaluating both the number of articles and citations, and authors are ranked based on these metrics in Table 5. Even though this paper reviewed as many relevant papers as possible, the results are limited to documents retrieved through the PRISMA-ScR process described in Figure 1. For example, some publications may not be indexed in the WoS database, may have been missed due to the chosen search string, may have been excluded based on criteria such as being conference proceedings. These limitations could introduce inaccuracies. Another potential source of bias is the inability to distinguish between authors with identical names. Likewise, authors who publish under different names may not be correctly linked. To address this issue, it is strongly recommended that researchers be assigned a unique, persistent identifier, such as the Open Researcher and Contributor ID (ORCID), upon publishing their first paper. This would help resolve such issues, regardless of how a researcher’s name appears across different publications (van Nunen et al., 2018; Chiu and Ho, 2007).
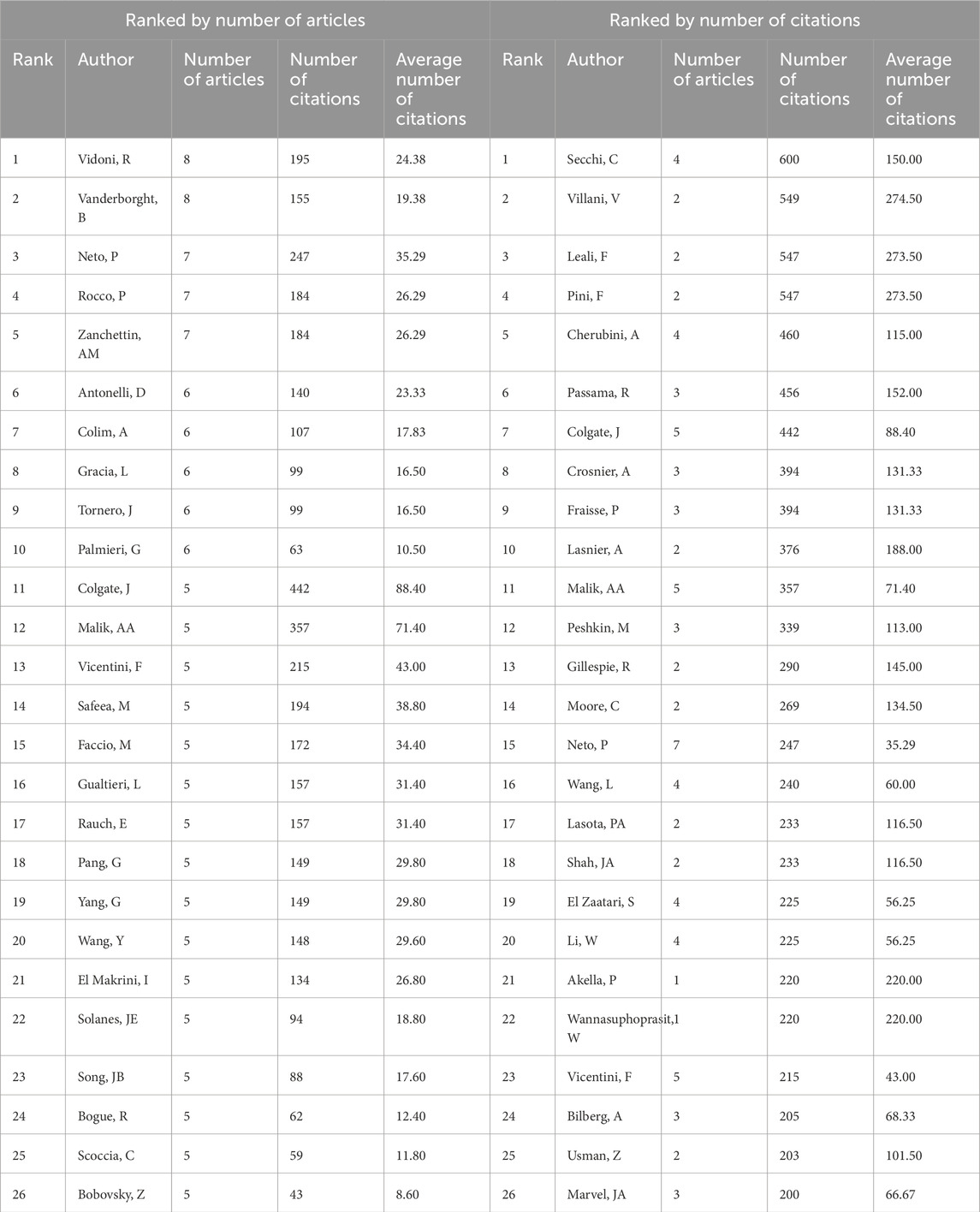
Table 5. Contributions of authors to the field of cobotics for industry.
Vidoni, R., and Vanderborght, B. lead the ranking in terms of the number of articles, with 8 papers each. Vidoni, a professor at the Free University of Bozen-Bolzano (Bolzano, Italy), specializes in high-performance (energy, vibration, safety, collaborative) automatic machines. Vanderborght, a professor at the Vrije Universiteit Brussel (Brussels, Belgium), focuses on cognitive and physical human-robot interaction, robot-assisted therapy, humanoids, and rehabilitation robotics using variable impedance actuators. In terms of citations, Secchi, C. leads with 600 citations. Secchi is a professor at the University of Modena and Reggio Emilia, known for his work in human-robot collaboration, multi-robot systems, and medical robotics.
Figure 7 illustrates co-authorship in the cobotics research field for industry, with spheres representing authors, colors indicating clusters of authors, and arcs showing co-authorship strength. It reveals that the international community actively engaged in cobotic research remains limited.
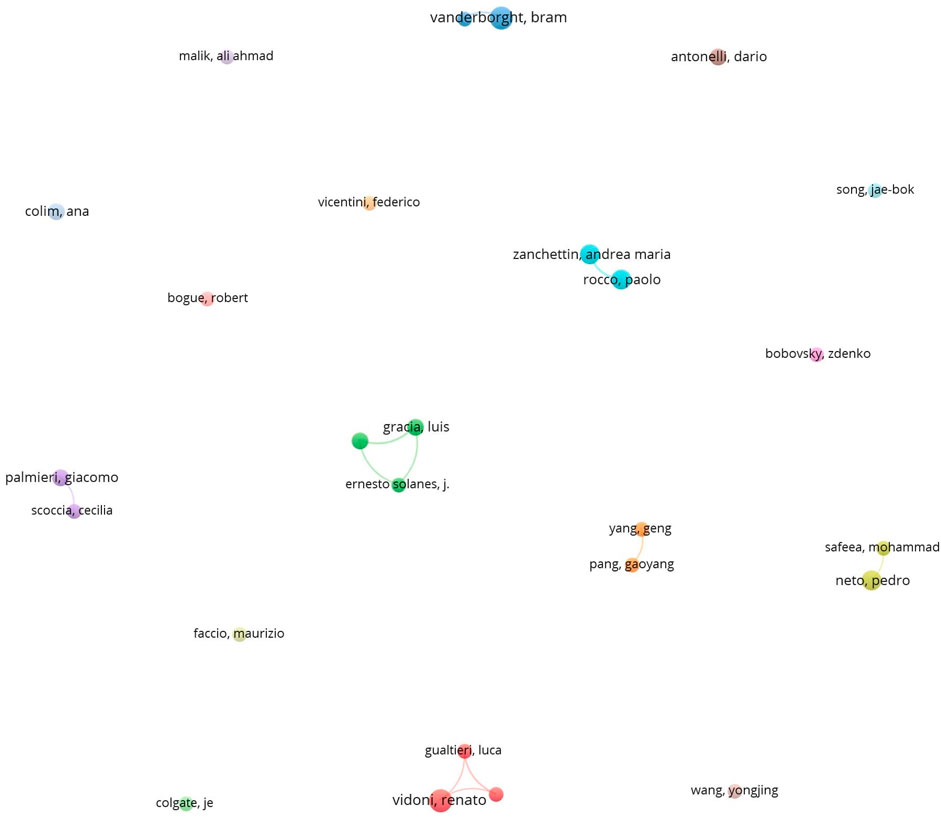
Figure 7. Co-authorship network with at least five publications.
3.5 Prominent research topics
Analyzing the frequency of terms in the 532 retrieved papers offers valuable insights into the main research topics within the field of cobotics for industry. To identify the most prominent topics, a terms co-occurrence density map was constructed. Terms appearing in at least five papers were included, while general terms such as “work”, “model”, or “methodology”, as well as cobot-specific terms like “robot”, “collaboration”, “collaborative robot”, or “cobot”, were excluded. This process identified a total of 71 relevant terms, with their co-occurrence density visualized in Figure 8.
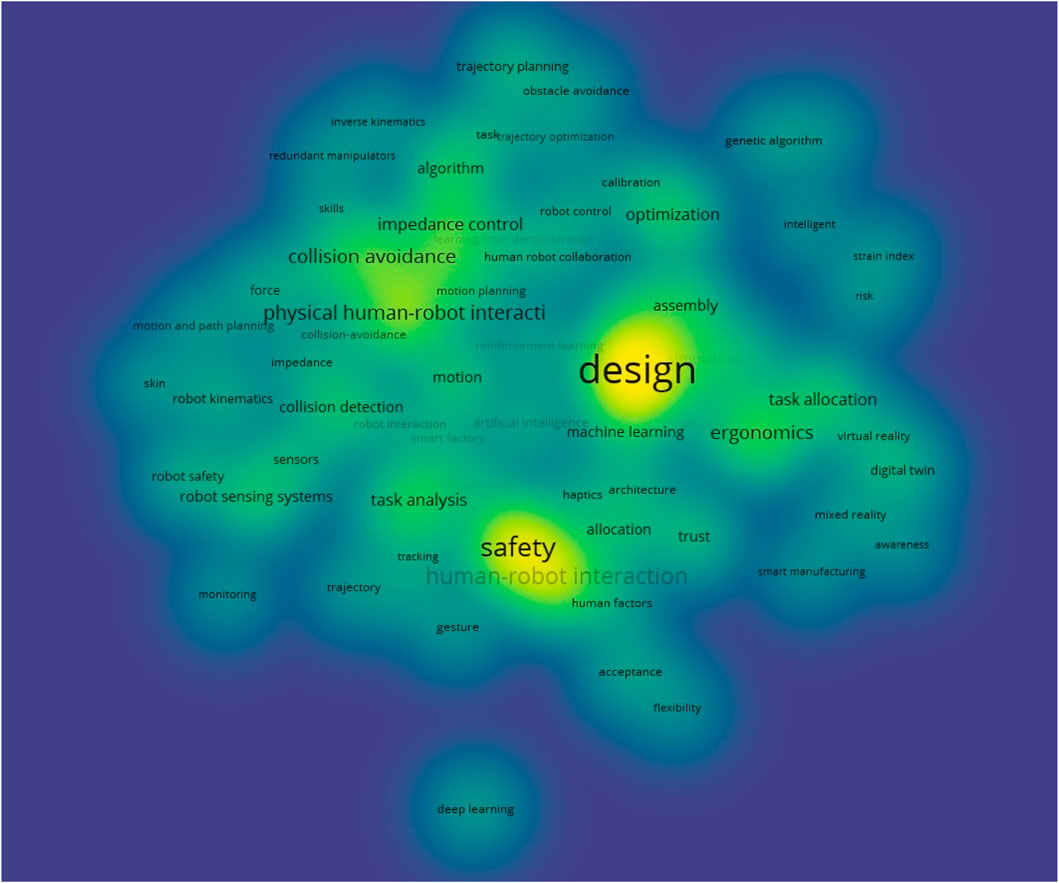
Figure 8. Density of term co-occurrence with a minimum of five occurrences.
4 Content analysis–Results and discussions
In this section, we provide the results and discussions of the content review. The content analysis of the paper resulted into a univocal categorization framework, along with a bibliometric analysis for each category. A thorough analysis of the terms on the map (Figure 8) led to creating 25 sub-categories of research topics. Afterwards, those sub-categories have been grouped into six categories, as shown in Figure 9. The categories are: 1) deployment of cobots, 2) safety in cobotics for industry, 3) human-robot tasks allocation, 4) human-robot interaction, 5) performance of actuating systems, and 6) robot program generation. In this section, we provide a high-level overview of existing viewpoints by categorizing and discussing them using the categorization framework. A brief discussion of the research topics (i.e., categories) is presented in the following subsections.
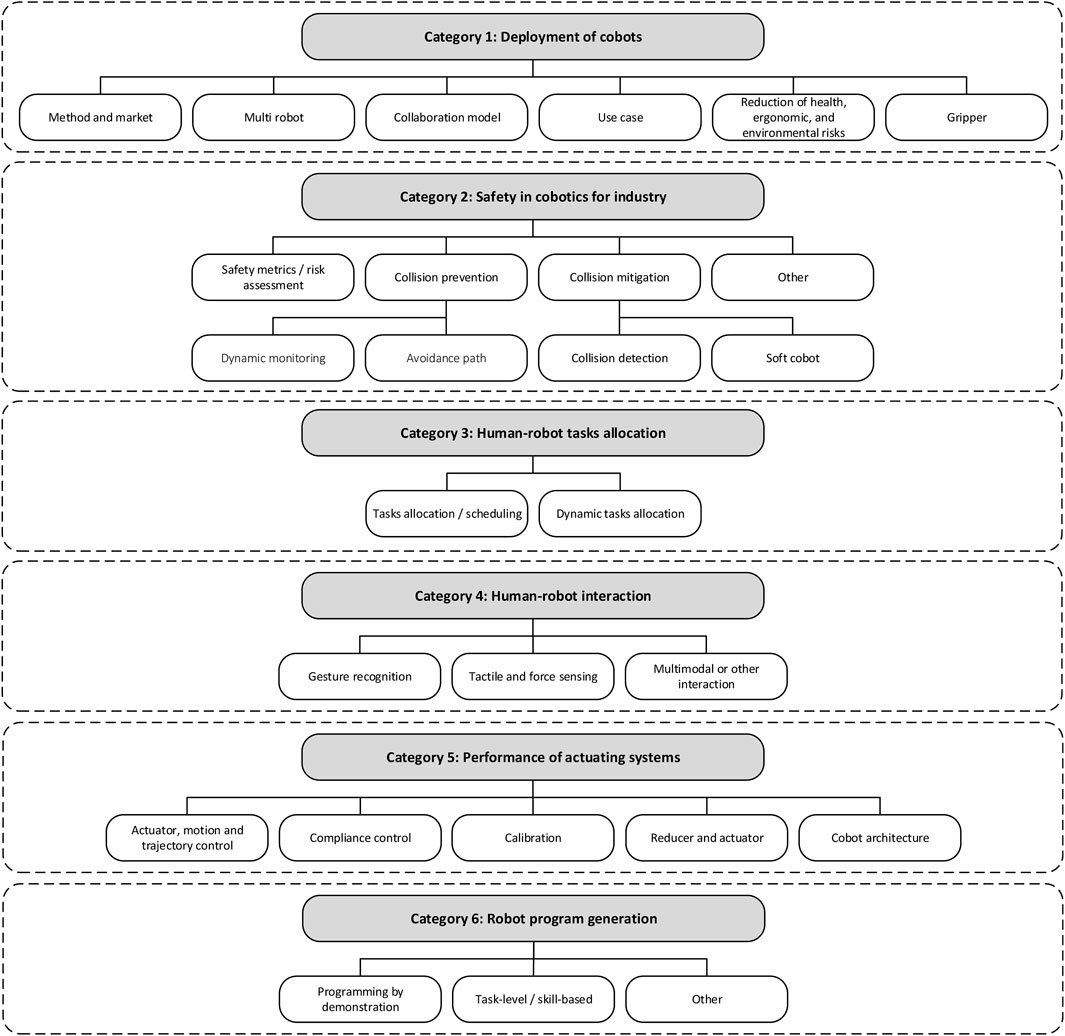
Figure 9. The framework for developing research topics in cobotics for industry.
4.1 Deployment of cobots
The category “Deployment of cobots” is how to deploy cobots in an industrial organization. Methodologies for deployment are studied to optimize cobots’ integration. Furthermore, comparing traditional robots versus cobots (Faccio et al., 2019), maximizing with other enabling technologies (e.g., virtual reality and digital twins) are some examples of research outputs. For instance, using a digital twin, which is a virtual replica (model) of a real system, can guide and enhance the performance of the actual system. Several researchers put efforts to explore the application of digital twins (Gallala et al., 2022; Lima et al., 2019; Malik and Brem, 2021; Ronzoni et al., 2021), virtual reality (Badia et al., 2022), mixed reality (Ostanin et al., 2021), or a combination of them (Pérez et al., 2020; Wolfartsberger et al., 2019), to address complexities in workspaces where humans and cobots interact with each other.
Growing interests on cobots in commercial markets has been investigated in the literature. These papers presented here explore the market potential and future prospects of cobots. For example, scholars have predicted that the significance of cobots will continue to grow (Bogue, 2022; Bogue, 2016b; Bloss, 2016). Although the cobotic is a relatively new research topic in the industrial robotics, the applications of cobots are rapidly expanding in industrial sectors such as assembly, packaging, and surface treatment. This category also covers the papers that use cases explained how to deploy efficiently cobots for studied applications. Table 6 presents an outline of the deployment of collaborative applications.
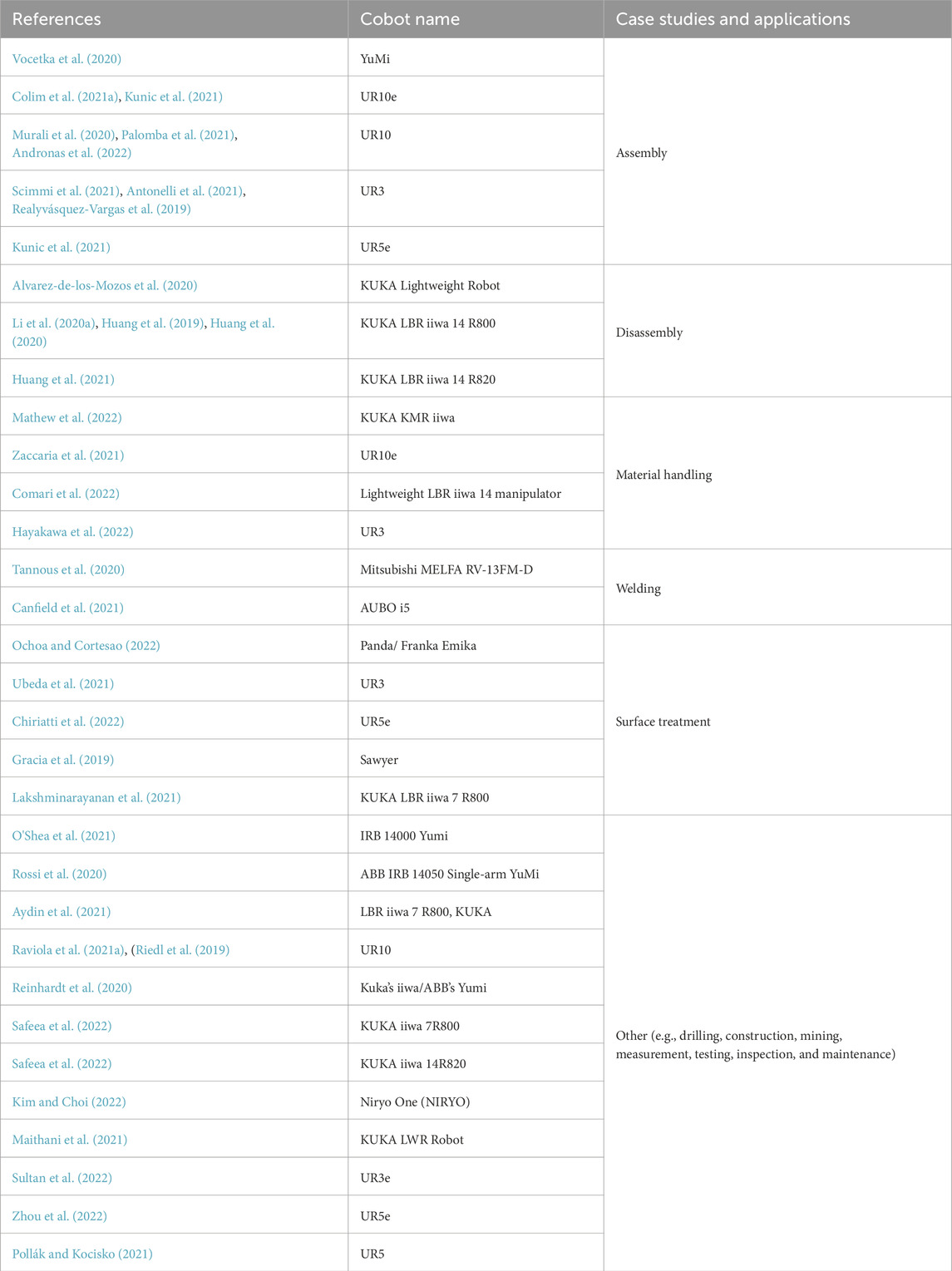
Table 6. Examples of the industrial collaborative-application-related research.
Despite increasing cobot-related applications, their adoption remains inadequate in real environments. Therefore, researchers investigate on effective parameters on cobots’ adoption such as trust between operator and cobot. Styles of human-robot symbiosis are modelled or experienced to improve trust and operators’ satisfaction as well as performance (Lambrechts et al., 2021; Zemlyak et al., 2022; Baumgartner et al., 2022; Quintana et al., 2022; Mateus et al., 2019; Andersson et al., 2021; Liu and Cao, 2022; Simoes et al., 2020; Bagheri et al., 2022; Kopp et al., 2022; Maurtua et al., 2017a; Sauer et al., 2021). Clearly enough, successfully deploying a cobot in a system depends on various factors and can have both positive and negative impacts. Therefore, evaluating the cobot’s impacts (e.g., economic, social, environmental impacts) before deployment is crucial. This category can contain works that investigate the impacts of cobots, as well as those that develop models at improving these impacts (Alvarez-de-los-Mozos et al., 2020; Ronzoni et al., 2021; Colim et al., 2021a; Palomba et al., 2021; Realyvásquez-Vargas et al., 2019; Chiriatti et al., 2022; Colim et al., 2021b; Zhang YJ. et al., 2021; Ojstersek et al., 2022; Calvo and Gil, 2022; Navas-Reascos et al., 2022; Javernik et al., 2022; Kim et al., 2021; El Makrini et al., 2022; Liu and Wang, 2020; Gualtieri et al., 2020; Ibáñez et al., 2021).
As discussed above, one of the advantages of implementing cobots is the reduction of health, ergonomic, and environmental risks (which is a social consideration), such as biomechanical overload. Industrial workers face to various ergonomic hazards such as improper postures, repetitive motions, heavy lifting, and vibrations. Several techniques are available to assess ergonomic risk factors, including observational, tool-based, and questionnaire-based methods (Cheraghi et al., 2019). Among these, observational methods like Rapid Upper Limb Assessment (RULA) (McAtamney and Corlett, 1993), Rapid Entire Body Assessment (REBA) (Hignett and McAtamney, 2000), Posture, Activity, Tools and Handling (PATH) (Buchholz et al., 1996), and the Ovako Working Posture Analysing System (OWAS) (Karhu et al., 1977) are widely used. These methods have been extensively applied for ergonomic evaluation of collaborative systems, including RULA (Colim et al., 2021a; Palomba et al., 2021; Chiriatti et al., 2022; Colim et al., 2021b; Navas-Reascos et al., 2022; Gualtieri et al., 2020; Ibáñez et al., 2021; Colim et al., 2021c), the Strain Index (SI) (Colim et al., 2021b; Zhang YJ. et al., 2021), NIOSH indices (Ronzoni et al., 2021), REBA (El Makrini et al., 2019), KIM-MHO (Colim et al., 2021b; Colim et al., 2020), EAWS (Maurice et al., 2019), JSI (Navas-Reascos et al., 2022), and OCRA (Ronzoni et al., 2021; Gualtieri et al., 2020). Despite their popularity, conventional techniques for evaluating ergonomic conditions in cobot-related workspaces have limitations: they may not cover all types of activities in a collaborative environment, and they are incapable of addressing dynamic phenomena, such as fast motions. Consequently, it is more accurate to employ a technique specifically designed for assessing ergonomic risks of collaborative jobs. To address this need, researchers can be attracted to propose methods specifically developed for evaluating ergonomic risks associated with collaborative activities (Maurice et al., 2017).
Grippers are the most widely adopted end-effectors in collaborative industrial applications. They are essential for tasks requiring precision and versatility like human-hand capabilities, making them an interesting research topic in the field of cobotics. Grippers must be designed to be cost-effective and capable of handling a wide range of objects that vary in size, shape, and stiffness. In addition, they should ensure operator safety by limiting contact forces and avoiding sharp edges and pinch points. This sub-category has been attracted a lot of attentions of the cobotic researchers (Bogue, 2016a; Birglen, 2019; Iqbal et al., 2021; Anwar et al., 2019).
4.2 Safety in cobotics for industry
This category represents how to guarantee the safety of the operator while optimizing the performance of the cobot. It is mainly dedicated to the risk of an unwanted collision between the cobot and the operator. This category comprises papers discussing standards for cobot safety and how to meet them. According to those papers, the main safety standards related to robotic are Section IV of Chapter 4 of OSHA Technical Manual (OSHA, 2017), ANSI/RIA R15.06 (Association, 2012), ISO 10218-1 (ISO, 2011a), and ISO 10218-2 (ISO, 2011b). Among these standards, the most relevant standard addressing cobots in addition to conventional industrial robots is ISO 10218, Parts 1 and 2. While the papers analyzed regarding the safety category used the 2011 version of ISO 10218, a recent version of that standard was issued in 2025, i.e., after the publication of those papers. The 2011 version of part 2 introduced the concept of “collaborative robots”, which is no longer used in its 2025 version (ISO, 2025a; ISO, 2025b). The latter focuses more on the collaborative aspect of the robot application. However, to design a safe collaborative workspace, a technical specification ISO/TS 15066 (ISO, 2016), that complements the former version of ISO 10218 was needed. Now, most of that TS is available and updated in the 2025 version of ISO 10218.
The ISO 10218:2011 and ISO/TS 15066:2016 cited in the papers introduced four safety methods for a collaborative application: (i) safety-rated monitored stop (SRMS), (ii) hand guiding (HG), (iii) SSM, and (iv) PFL. The 2025 version of ISO 10218 now only considers methods (ii) to (iv) for collaborative applications. Even though SRMS is not in the 2025 version, the following paragraph describes succinctly each of the four methods for better understanding of their meaning.
In the SRMS method, both the operator and cobot could not operate simultaneously within the shared space. To avoid an unwanted collision, the cobot would have been stopped when it detects an operator inside the shared space. In the HG method, the operator directly teaches the cobot by physically moving it. In the SSM method, the cobot’s speed adjusts based on the separation distance between the operator and the cobot. The PFL method is prone to unintentional collisions. It limits the quasi-static contact (i.e., contact between an operator and part of a robot system, where the operator body part can be clamped between a moving part of a robot system and another fixed or moving part of the robot cell) and transient contact (i.e., contact between an operator and part of a robot system, where the operator body part is not clamped and can recoil or retract from the moving part of the robot system) forces below specific thresholds to mitigate human injuries. Achieving that involves active safety measures like compliance control and passive safety measures like edge smoothing during the cobot’s design stage. Based on ISO 10218-2:2025, hazard identification and risk analysis is needed to identify the hazards and assess the risks of both the cobot system and the collaborative environment and then select the proper safety measures (ISO, 2011a).
The developed methodologies in the literature related to the risk of collision between a cobot and an operator can be classified into two main groups: (i) pre-collision (collision prevention), and (ii) post-collision (collision mitigation). The pre-collision approach aims to ensure the safety of operators by detecting potential collisions between the cobot and the operator. This detection is achieved through safety sensor systems such as proximity and visual sensors, or by predicting unintended collisions using stochastic or machine learning methods. Once a potential collision is identified, preventive measures are implemented to avoid it (Li et al., 2023; Gualtieri et al., 2021a; Zorman et al., 2023). In the context of pre-collision strategies, the former SRMS, as well as the actual HG, and SSM safety methods played a key role in the papers analyzed.
Dynamic monitoring allows to know where are located the robot and the operator in unstructured and time-varying environment using advanced sensing technologies. Various approaches have been developed, including the use of virtual reality, Internet of Things (IoT), and sensing technologies to monitor humans in robot workspaces, aiming to prevent collisions (Tsuji and Kohama, 2019; Farsoni et al., 2022; Guerra et al., 2016; Gradolewski et al., 2020; Geiger and Waldschmidt, 2019; Ferraguti et al., 2020; Costanzo et al., 2022; Bin Islam et al., 2019; Barbosa et al., 2022; Safeea and Neto, 2019; Benli et al., 2019; Kianoush et al., 2021). Effective collision avoidance and path optimization are crucial for maintaining safety and productivity in collaborative applications. Therefore, several studies have focused on pre-collision algorithms and dynamic path planning to minimize collision risks and improve cycle times (Scimmi et al., 2021; Kot et al., 2022; Scalera et al., 2022; Chiriatti et al., 2021; Zanchettin et al., 2022; Chan and Tsai, 2020). In addition, the visibility of the robot to the human operator can significantly impact both the operator’s comfort and the probability of collisions. This critical factor has been examined in several research papers with the aim of enhancing the safety of collaborative application (Tarbouriech and Suleiman, 2020; Dufour et al., 2020; Najmaei et al., 2010). Readers interested in further exploration of collision avoidance can find successful efforts in (Simas et al., 2022; Scoccia et al., 2021; Safeea et al., 2019; Elguea-Aguinaco et al., 2022).
On the contrary, the post-collision approach focuses on operator safety through the detection of unintended collisions and then mitigation of energy transfer during these collisions that can lead to human injuries or even fatalities (Li et al., 2023; Gualtieri et al., 2021a; Zorman et al., 2023). In the context of post-collision strategies, the PFL method is employed. As mentioned above, although the PFL method allows unintentional collisions, it is required to include contact force measurements to validate safety (Zimmermann et al., 2022). Therefore, techniques (such as statistical models) to determine contact force thresholds for using in PFL method has been proposed (Behrens et al., 2022). Additionally, several testing procedures for validating safety in PFL method have been developed (DGUV, 2017; ANSI, 2018), and the reliability of such tests have been examined (Scibilia et al., 2021).
Soft cobots (i.e., cobots that can deform and yield in a collision) are often equipped with a protective covering, known as “skin”, to offer both active protection (detecting collisions and initiating cobot reactions) and passive protection (providing a cushioning effect to mitigate the consequences of collisions). Therefore, developing cobot skins take a great apportion of studies in this category (Runge and Raatz, 2017; Ye et al., 2022; Svarny et al., 2022; Pang et al., 2021; Nguyen et al., 2021; Ge et al., 2022; Ye ZQ. et al., 2020; O'Neill et al., 2018; Tsuji and Kohama, 2020; Heng et al., 2021). Furthermore, to reduce cobot production costs, sensor-less collision detection methods (e.g., neural network-based approaches) have gained attention (Kwon et al., 2021; Lee and Song, 2016; Heo et al., 2019; Sharkawy et al., 2020a; Ma et al., 2020; Czubenko and Kowalczuk, 2021; Le and Kang, 2022; Yen et al., 2019; Kim, 2022). Many other studies have contributed to the field of collision detection, including (Heo et al., 2019; Abu Al-Haija and Al-Saraireh, 2022; Amin et al., 2020; Huang et al., 2022; Lee et al., 2019; Li W. et al., 2020; Long et al., 2022; Lu SN. et al., 2022; Nguyen and Case, 2022; Park et al., 2022; Ren et al., 2018; Rodrigues et al., 2023; Shin et al., 2019; Strazdas et al., 2021; Xiao et al., 2018; Yun A. et al., 2022; Zhang ZJ. et al., 2021), providing valuable information for researchers. To ensure the operator’s safety in a collaborative workspace, in addition to measuring and controlling the interaction force, other parameters like its direction, the point of application, and the time required to measure these parameters are also important and can form the research objective of a study (Popov et al., 2021).
Several techniques have been developed for identifying and evaluating system hazards, such as Failure Mode and Effect Analysis (FMEA), Job Safety Analysis (JSA), and Fault tree analysis (FTA), as well as for assessing human reliability, including Human Error Assessment and Reduction Technique (HEART) and Cognitive Reliability and Error Analysis Method (CREAM). These generic techniques can be applied to cobotics. However, due to the unique challenges inherent in cobotic applications, some researchers have worked on developing safety metrics and risk assessment tools specifically for these systems (Askarpour et al., 2019; Marvel et al., 2015; Pantano et al., 2022; Vemula et al., 2018; Vicentini et al., 2020). A safety metric or risk assessment tool for cobotics should be able to consider various parameters, such as the uncertainty associated with human operator behaviors, the potential severity of physical contact between the cobot and the operator, and changes within the system. Last but not least, one of the key factors that can impact safe collaboration in cobotics is the threat of cyber-attacks. Defense strategies to protect workers against cyber-attacks have been also investigated (Khalid et al., 2018).
4.3 Human-robot tasks allocation
“Human-robot tasks allocation” aims to distribute the tasks between humans and cobots. This involves determining the sequence of tasks and deciding which agent (cobot or human) should perform each task. With shorter product life cycles and high-mix production, the job splitting between the agents is becoming increasingly important. Research in this field has focused on optimizing task allocation to enhance efficiency, ergonomics, and economic factors. Optimization models aim to minimize makespan and production costs while considering ergonomic risks and worker wellbeing (El Makrini et al., 2019; Yu et al., 2020; Wang et al., 2018; Nourmohammadi et al., 2022; Mura and Dini, 2022; Liu et al., 2024b; Liau and Ryu, 2022a; Gjeldum et al., 2022; Cai et al., 2023; Ferreira et al., 2021; Kinast et al., 2022; Almasarwah et al., 2022; Stecke and Mokhtarzadeh, 2022; Mura and Dini, 2019; Li ZX. et al., 2021; Weckenborg et al., 2022; Pearce et al., 2018; Boschetti et al., 2021a).
As revealed in the above-reviewed papers, optimal human-robot task allocation involves balancing objectives like minimizing cycle time, costs, and ergonomic risks. Selecting the best approach is challenging due to conflicting requirements. For instance, minimizing production costs by assigning more tasks to cheaper work cells may delay deliveries, while minimizing makespan may increase costs. Additionally, relying solely on these objectives may lead to assigning high-risk tasks to human workers. Thus, the collaborative applications designers should comprehensively consider economic, social, and environmental aspects to ensure sustainable task allocation in collaborative applications.
These approaches are powerful in a deterministic collaborative environment, where both the operator and the cobot must adhere to a pre-planned task sequence. However, in real collaborative task-allocation problems, various uncertain parameters, especially those related to the operator, should be considered. For example, the operator may deviate from the task sequence, either by mistake or based on personal preference. Such deviations may not yield the predefined optimal solution but could have a negligible impact on the objectives of the system. In such scenarios, the process may halt if the cobot cannot adapt to new conditions or human actions. Therefore, a cobot should be capable of finding alternative solutions while still maintaining the original objectives. To address these uncertainties, dynamic task allocation models have been developed (Antonelli et al., 2021; Pupa et al., 2021; Petzoldt et al., 2022; Chacón et al., 2021; Messeri et al., 2022; Casalino et al., 2021; Antonelli and Bruno, 2019; Bruno and Antonelli, 2018; Pupa et al., 2022).
4.4 Human-robot interaction
“Human-robot interaction” gathers research on the way that the human and the robot interact themselves (co-working) in order to perform their allocated industrial actions. In the collaborative application, the operator often defines the objective of collaborative work and the cobot assists the operator to achieve this objective. The cobot must therefore be able to learn from the operator and estimate his intentions. Various input interaction modes are explored to instruct the cobot about the state of humans or their intentions such as gesture visual recognition and force sensing.
Gesture (e.g., hand, body, and head) visual recognition is one of the most powerful communication mode which can be developed by techniques such as wearable sensors, inertial measurement unit (IMU) sensors surface electromyography (EMG) signals (Mukherjee et al., 2022; Papanagiotou et al., 2021; El Aswad et al., 2021; Coupeté et al., 2019; Mendes, 2022; Cornak et al., 2022; Tang et al., 2015; Shukla et al., 2018; Lee et al., 2022). Besides vision-based systems, wearable systems capable of measuring joint rotation can easily capture an operator’s gestures. However, a primary limitation of such systems is their potential interference with the operator’s work. In addressing this challenge, wireless wearable system designed to determine the orientation of the operator’s upper body parts has been developed (Skulj et al., 2021). Tactile sensing allows cobots to detect and interpret pressure and force exerted by human operators (Olivares-Alarcos et al., 2019; Bauer et al., 2008). Cobotics leveraging tactile sensors can dynamically determine human grasp positions and intentions being able to ability to adapt to human actions and improve overall interaction efficiency (Li TJ. et al., 2021; Ansari et al., 2020). Overall, numerous papers in this category focus on designing and developing new sensors to improve cobotic systems and increasing their cost-effectiveness (Zaid et al., 2022; Long et al., 2021; Fu and Cai, 2022; Castano-Cano et al., 2022). In human-robot interactions, relying solely on mechanical force-torque sensors to measure forces can sometimes lead to the unintentional measurement of additional forces arising from the robot’s contact with an unpredictable environment. This can potentially introduce inconsistencies in human-robot interactions (Ajoudani et al., 2018). As an alternative approach, bio-signals, like EMG signals, can be used to directly measure the forces exerted by the human operator (Bednarczyk et al., 2022).
In a collaborative application, communication methods extend beyond gesture recognition and force sensing to include natural speech, gaze, graphical signage, and physiological signals (e.g., electroencephalographic (EEG)) (Dmytriyev et al., 2022; Eimontaite et al., 2022; Eimontaite et al., 2019). Natural speech and gaze are also crucial for effective human-robot interaction. Speech control systems allow operators to command multiple robots in different languages (Hofer and Strohmeier, 2019). Also, using EEG signals, emotional states (e.g., fearful) of operators can be assessed in a cobotic system (Buerkle et al., 2021; Borboni et al., 2022; Eyam et al., 2021). In addition, to enhance communication reliability, some researchers have adopted multimodal interaction modes to provide complementary or redundant input options (Tsuji and Kohama, 2022).
4.5 Performance of actuating systems
“Performance of actuating systems” is how to improve the actuating system of a cobot through its logical or physical equipment. The control of trajectory and motion is addressed in this category. To achieve high efficiency, precision, and safety in cobotics, numerous researchers have made efforts to develop trajectory and motion planning methods. These methods aim to balance performance with psychological and physical safety of the operator (Zhao et al., 2022; Ye L. et al., 2020; Wittmann and Rixen, 2022; Vysocky et al., 2020a; Sidobre and Desornneaux, 2019; Magyar et al., 2019; Li et al., 2019; Krämer and Bertram, 2022; Kraemer et al., 2020; Chen et al., 2018; Liu et al., 2022a; Rojas et al., 2019; Rojas et al., 2020; Zhu et al., 2022; Palleschi et al., 2021).
Force control was originally developed for applications where the robot’s end-effector comes into direct physical contact with its environment, often involving tasks like surface treatments, such as polishing and grinding (Ochoa and Cortesao, 2022; Ubeda et al., 2021; Gracia et al., 2019; Lakshminarayanan et al., 2021; Perez-Vidal et al., 2019). These scenarios require precise force management to achieve the desired quality of work. Due to the safety concerns, force control and its variants, such as impedance control and admittance control, become increasingly significant in a collaborative system. Impedance control involves computing the robot’s resistance to motion when external forces are applied, while admittance (i.e., the inverse of the impedance) control focuses on adjusting the robot’s trajectory in response to external forces (Siciliano and Villani, 1999; Khan et al., 2014). Impedance/admittance control is commonly employed in cobotics for physical interactions among humans, cobots, and the environment (Aydin et al., 2021; Li et al., 2020c; Kim and Yang, 2021; Dou et al., 2022). Compliance (the opposite of stiffness), i.e., the ability to yield or adapt to external forces, can be achieved through (i) active compliance, and (ii) passive compliance. Active compliance is a software-based approach, allowing the robot to dynamically respond to external forces. Passive compliance, on the other hand, is designed into the robot’s mechanical structure, allowing it to naturally respond to external forces. Both approaches have been extensively investigated in the literature (Huang et al., 2019; Huang et al., 2020; Huang et al., 2021; Zhang SL. et al., 2021; Zeng F. et al., 2019).
The ability to vary stiffness is crucial in cobotics. High stiffness is employed for regular operational routines, while reduced stiffness can minor contact forces or even be a detector of collisions (Ayoubi et al., 2019; Ayoubi et al., 2020; Liu YW. et al., 2021). In addition, variable stiffness enables the cobot to perform diverse tasks (Ren et al., 2019a). Clearly enough, accuracy is a critical performance characteristic of a cobotic system, particularly in applications that demand precise positioning, manipulation, or sensing. Calibration is the process that guarantees the cobotic system achieves the desired accuracy. Research in this area focuses on improving metrology system and calibration techniques (Pagani et al., 2021; Yun HT. et al., 2022; Kim et al., 2022; Pollák et al., 2020; Kolyubin et al., 2019).
In the literature, some concepts of novel architecture of cobots are explored, such as modular components between cobots, two armed cobot, or extra components to reduce inertia. For instance, the integration of two cobotic arms significantly enhances the potential of cobotics for industrial applications, allowing for tasks such as handling bulky and heavy objects (Liu LY. et al., 2021; Cherubini et al., 2019). In addition, as discussed above, one of the most significant advantages of cobots over traditional industrial robots is their adaptability to a wide range of tasks. However, achieving this flexibility requires more than just reprogramming; the hardware components also need to be reconfigured (Romiti et al., 2022; Smrcek et al., 2022; Schou and Madsen, 2017; Wojtynek et al., 2019).
4.6 Robot program generation
“Robot program generation” is how to generate the program for the cobot, by benefiting of the collaboration with humans. It is useful to enable a fast and easy-to-attain cobot task reconfiguration, even for inexperienced operators. Programming by demonstration develops a manual physical guiding of the cobot by its end-effector. System records waypoints, force inside joints or gripper. This method has been widely applied in the literature (Canfield et al., 2021; Ochoa and Cortesao, 2022; Wang et al., 2019a; Wang LK. et al., 2022; Wang LK. et al., 2023; Tadese et al., 2021; Svejda et al., 2022; Stenmark et al., 2018; Rozo et al., 2016; Müller et al., 2020; Iturrate et al., 2021; De Winter et al., 2019; Carfi et al., 2020; Al-Yacoub et al., 2021a; Ajaykumar et al., 2021; Wang et al., 2021; Soares et al., 2021; El et al., 2022; Halim et al., 2022; Safeea and Neto, 2022). While “programming by demonstration” requires a lower level of knowledge from the operator, a cobot’s functionality is typically limited to replaying recorded actions. To overcome this limitation, teaching the cobot from visual input through demonstrations has been developed in the literature (De Coninck et al., 2020).
Skill-based programming reaches the same objective of quick and easy programming, enabling cobots to handle a wide range of tasks. In skill-based programming, robots follow a hierarchy that involves lower-level entities called “robot skills”. These skills represent specific actions that the robot is capable of executing. A task (e.g., removing a specific object from a table) is a sequence of the skills (e.g., pick up object) along with specified parameters (e.g., the object to pick up). Skills are pre-defined by the robotics programmer. The sequence of skills and their associated parameters, required to complete a task, is explicitly programmed by non-expert robot operators in the factory (Schou et al., 2018; Pedersen et al., 2016). Skill-based programming has gained the attention of several research studies (Giberti et al., 2022; Polverini et al., 2019; Herrero et al., 2017).
4.7 Bibliometric analysis of research topics
Each of the 532 retrieved papers was classified according to its main research objective. Figure 10 displays both the annual and cumulative number of publications for each research topic. The trends observed conclude that the exponential growth previously identified in Figure 2 is consistent across all research topics. It is evident that publications across all research topics have become more regular since 2016. Also, Table 7 provides the number of papers for each research topic, along with citation analysis and details on the most productive authors, institutions, countries, and leading journals. The most popular research topics are “safety in cobotics for industry” with 151 papers, followed by “deployment of cobots” with 141 papers and “performance of actuating systems” with 102 papers.
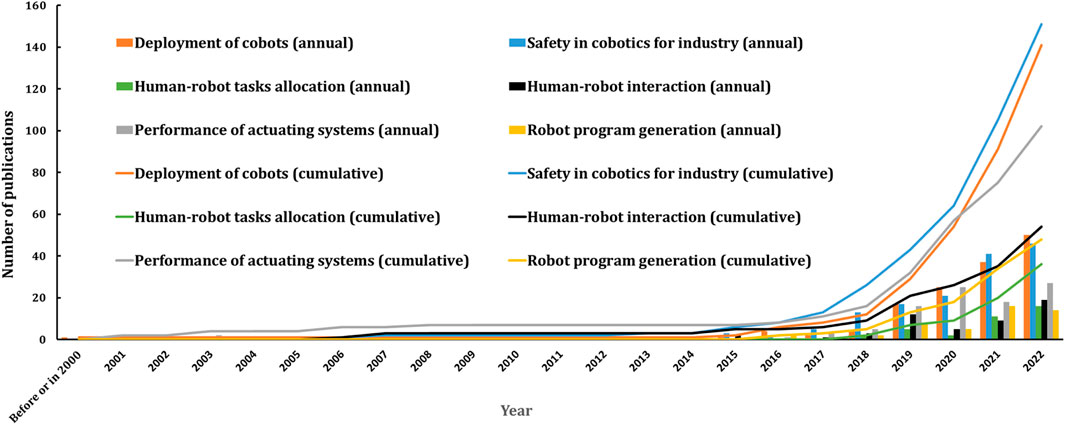
Figure 10. Evolution of research topics over time.
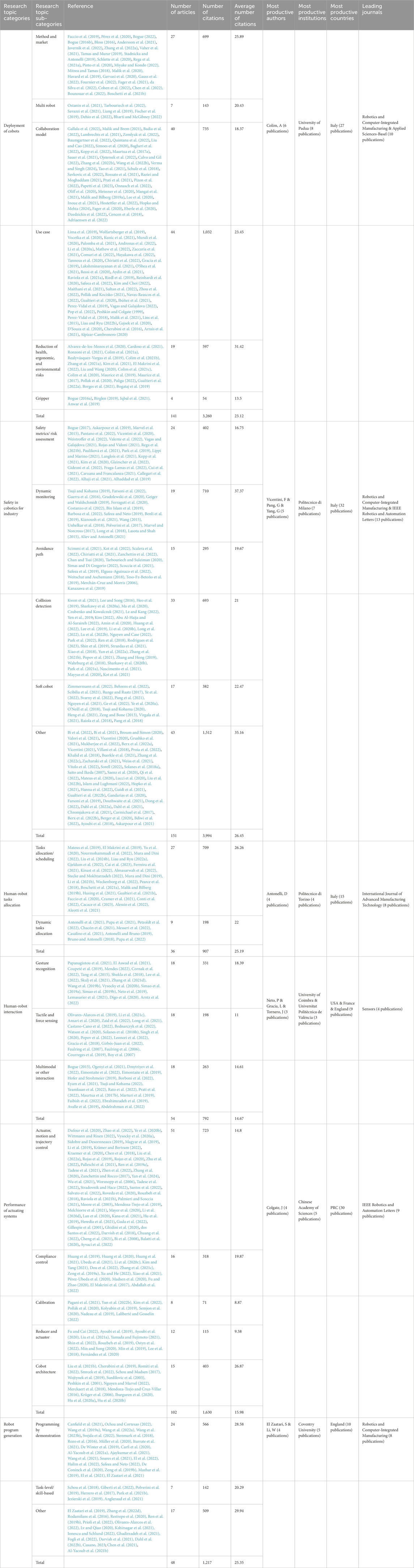
Table 7. Bibliometric analysis of research topics.
4.8 Advances for 2023 and 2024
Being aware that this paper presents an analysis of the scientific literature up to the end of 2022 in a fast-growing field, due to the constraints explained in Section 2.2, we present in this section some references, that give an idea of the trends in that domain for 2023 and 2024.
The International Federation of Robotics (IFR) (IFR, 2024) stated the top five global robotics trends in 2024: 1) AI and machine learning, 2) cobots in new applications, 3) mobile manipulators, 4) digital twins, and 5) humanoids. While trend 2 is about cobotics expanding in areas such as welding, trends 1, 3, and 4 can serve collaborative applications. Indeed, according to IFR, further cognitive collaboration with humans will be possible thanks to AI. Semeraro et al. (Semeraro et al., 2023) agree that machine learning has a great potential in HRI since it is a new way to develop cognitive models and behavioural blocks. IFR thinks that the possibility of mounting cobots onto mobile platforms generates new opportunities that will increase the demand for cobots. As shown in (Zafar et al., 2024), digital twins can serve collaborative applications by making them safer, through testing and optimizing the approach for HRI thanks to real-time data.
5 Conclusion and future research agenda
In cobot-related research, as the consulted scientific literature does not propose a comprehensive research agenda and lacks an extensive quantitative and qualitative analysis of the current state-of-the-art in cobotics, this paper has presented a scoping review and bibliometric analysis of the literature to investigate and reveal the development of cobotic research. Based on an analysis of 532 publications, retrieved from 2,195 records from the WoS database between 1996 and 2022, the study examined publication trends, leading journals, productive institutions, engaged countries, influential authors, and key topics. The study provides a macro-level guideline for cobotics researchers. The results demonstrate that, although the term “cobot” was first introduced in 1996 designating a passive manipulator, documented research activity in the field of industrial robots designed for collaboration with humans has become more regular from 2016 and has experienced exponential growth since then. The “Politecnico di Milano” is identified as the leading institution in terms of the number of publications, and the journal “Robotics and Computer-Integrated Manufacturing” is the primary source of publications. Professors Vidoni and Vanderborght are recognized as the most productive authors based on publication count. The contribution of countries was evaluated using two additional indices: the number of articles per capita and the number of articles per capita GDP. While Italy leads in total publications, Denmark has the highest proportion of its population engaged in cobotics research, and the PRC ranks first in terms of financial support for cobotics research. Furthermore, this paper provides a univocal categorization that includes deployment of cobots, safety in cobotics for industry, human-robot tasks allocation, human-robot interaction, performance of actuating systems, and robot program generation. This classification helps cobotic researchers in different fields understand research developments and trends, identify opportunities for collaboration, and select appropriate journals for publication. The most active research topic categories are, in order of importance: “safety in cobotics for industry”, “deployment of cobots”, and “performance of actuating systems.” In the latter, the “actuator, motion and trajectory control” sub-category was found to be the most popular among cobotic researchers.
Although this paper reviewed as many relevant papers as possible, the results are limited to documents indexed in the WoS database. Consequently, there may be other publications not indexed in this database, which could introduce inaccuracies in the results. Nonetheless, despite cobotics being a highly multidisciplinary research field, the co-authorship analysis reveals that there is still a limited international collaborative community actively engaged in cobotic research. Further research in the cobotics field could benefit from more international collaboration with multidisciplinary experts. Also, although the results showed that deploying cobots is one of the most prominent research topics in the field of cobotics, and cobot applications are rapidly increasing in industrial sectors such as assembly, packaging, and surface treatment, there remains significant potential for exploring other opportunities. Designing, and deploying cobots in new use cases can greatly advance the field of cobotics research. As clearly presented in this paper, there is an increase in research activity but not a diversification of research topics. It may be time to explore new research topics aligned with current industry challenges and societal needs: for example, social responsibility is not effectively addressed, which could be an important future research direction. Literature on cobots can also be reviewed and analyzed through emerging trends such as sustainability and Artificial Intelligence (AI). Therefore, conducting systematic reviews and bibliometric analyses on sustainability in cobots or the application of AI to cobots could be a promising avenue for future research.
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
AH: Writing – review and editing, Supervision, Formal Analysis, Project administration, Methodology, Funding acquisition, Data curation, Conceptualization. MC: Writing – review and editing, Data curation, Software, Conceptualization, Visualization, Methodology, Resources, Formal Analysis, Writing – original draft. JP: Data curation, Conceptualization, Methodology, Writing – review and editing, Resources, Writing – original draft, Visualization, Formal Analysis, Software. VB-G: Formal Analysis, Methodology, Data curation, Writing – review and editing, Writing – original draft, Conceptualization. SJ: Data curation, Methodology, Conceptualization, Project administration, Funding acquisition, Writing – review and editing, Formal Analysis, Software. HP: Conceptualization, Methodology, Writing – original draft, Formal Analysis, Data curation.
Funding
The author(s) declare that financial support was received for the research and/or publication of this article. The authors received financial support from the Faculty of Community Services at Toronto Metropolitan University and the Institut de recherche Robert-Sauvé en santé et en sécurité du travail (IRSST) for conducting this research and publishing this article.
Acknowledgments
The authors would like to thank the Faculty of Community Services at Toronto Metropolitan University and the Institut de recherche Robert-Sauvé en santé et en sécurité du travail (IRSST) for funding this research.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abdallah, M., Chen, A., Campeau-Lecours, A., and Gosselin, C. (2022). How to reduce the impedance for pHRI: admittance control or underactuation? Mechatronics 84, 102768. doi:10.1016/j.mechatronics.2022.102768
Abdelrahman, A. A., Strazdas, D., Khalifa, A., Hintz, J., Hempel, T., and Al-Hamadi, A. (2022). Multimodal engagement prediction in multiperson human-robot interaction. IEEE Access 10, 61980–61991. doi:10.1109/access.2022.3182469
Abu Al-Haija, Q., and Al-Saraireh, J. (2022). Asymmetric identification model for human-robot contacts via supervised learning. Symmetry-Basel 14 (3), 591. doi:10.3390/sym14030591
Adriaensen, A., Berx, N., Pintelon, L., Costantino, F., Di Gravio, G., and Patriarca, R. (2022). Interdependence Analysis in collaborative robot applications from a joint cognitive functional perspective. Int. J. Ind. Ergon. 90, 103320. doi:10.1016/j.ergon.2022.103320
Ajaykumar, G., Stiber, M., and Huang, C. M. (2021). Designing user-centric programming aids for kinesthetic teaching of collaborative robots. Robot. Auton. Syst. 145, 103845. doi:10.1016/j.robot.2021.103845
Ajoudani, A., Zanchettin, A. M., Ivaldi, S., Albu-Schäffer, A., Kosuge, K., and Khatib, O. (2018). Progress and prospects of the human–robot collaboration. Auton. Robot. 42, 957–975. doi:10.1007/s10514-017-9677-2
Alauddin, M., Khan, F., Imtiaz, S., and Ahmed, S. (2018). A bibliometric review and analysis of data-driven fault detection and diagnosis methods for process systems. Ind. Eng. Chem. Res. 57 (32), 10719–10735. doi:10.1021/acs.iecr.8b00936
Aleotti, J., Baldassarri, A., Bonfè, M., Carricato, M., Chiaravalli, D., Di Leva, R., et al. (2021). Toward future automatic warehouses: an autonomous depalletizing system based on mobile manipulation and 3D perception. Appl. Sci. Basel 11 (13), 5959. doi:10.3390/app11135959
Alessio, A., Aliev, K., and Antonelli, D. (2022). Multicriteria task classification in human-robot collaborative assembly through fuzzy inference. J. Intell. Manuf. 35, 1909–1927. doi:10.1007/s10845-022-02062-4
Alhaddad, A. Y., Cabibihan, J. J., Hayek, A., and Bonarini, A. (2019). A low-cost test rig for impact experiments on a dummy head. Hardwarex 6, e00068. doi:10.1016/j.ohx.2019.e00068
Alhaji, B., Prilla, M., and Rausch, A. (2021). Trust dynamics and verbal assurances in human robot physical collaboration. Front. Artif. Intell. 4, 703504. doi:10.3389/frai.2021.703504
Aliev, K., and Antonelli, D. (2021). Proposal of a monitoring system for collaborative robots to predict outages and to assess reliability factors exploiting machine learning. Appl. Sci. Basel 11 (4), 1621. doi:10.3390/app11041621
Almasarwah, N., Abdelall, E., Suer, G. A., Pagan, J., and You, Y. Q. (2022). Collaborative robots' assembly system in the manufacturing area, assembly system 4.0. Int. J. Adv. Manuf. Technol. 122 (2), 1069–1081. doi:10.1007/s00170-022-09932-4
Alpízar-Cambronero, A. (2020). 3D scanning and detection of objects for a subsequent manipulation by a collaborative robot. Tecno Marcha 33, 128–140. doi:10.18845/tm.v33i7.5488
Alvarez-de-los-Mozos, E., Rentería-Bilbao, A., and Díaz-Martín, F. (2020). WEEE recycling and circular economy assisted by collaborative robots. Appl. Sci. Basel 10 (14), 4800. doi:10.3390/app10144800
Al-Yacoub, A., Flanagan, M., Buerkle, A., Bamber, T., Ferreira, P., Hubbard, E. M., et al. (2021b). Data-Driven modelling of human-human Co-manipulation using force and muscle surface electromyogram activities. Electronics 10 (13), 1509. doi:10.3390/electronics10131509
Al-Yacoub, A., Zhao, Y. C., Eaton, W., Goh, Y. M., and Lohse, N. (2021a). Improving human robot collaboration through Force/Torque based learning for object manipulation. Robot. Comput. Integr. Manuf. 69, 102111. doi:10.1016/j.rcim.2020.102111
Amin, F. M., Rezayati, M., van de Venn, H. W., and Karimpour, H. (2020). A mixed-perception approach for safe human-robot collaboration in industrial automation. Sensors 20 (21), 6347. doi:10.3390/s20216347
Amin, M. T., Khan, F., and Amyotte, P. (2019). A bibliometric review of process safety and risk analysis. Process Saf. Environ. Prot. 126, 366–381. doi:10.1016/j.psep.2019.04.015
Andersson, S. K. L., Granlund, A., Bruch, J., and Hedelind, M. (2021). Experienced challenges when implementing collaborative robot applications in assembly operations. Int. J. Autom. Technol. 15 (5), 678–688. doi:10.20965/ijat.2021.p0678
Andronas, D., Arkouli, Z., Zacharaki, N., Michalos, G., Sardelis, A., Papanikolopoulos, G., et al. (2022). On the perception and handling of deformable objects - a robotic cell for white goods industry. Robot. Comput. Integr. Manuf. 77, 102358. doi:10.1016/j.rcim.2022.102358
Angleraud, A., Sefat, A. M., Netzev, M., and Pieters, R. (2021). Coordinating shared tasks in human-robot collaboration by commands. Front. Robot. AI 8, 734548. doi:10.3389/frobt.2021.734548
Ansari, R. J., Giordano, G., Sjöberg, J., and Karayiannidis, Y. (2020). Human grasp position estimation for human-robot cooperative object manipulation. Robot. Auton. Syst. 131, 103600. doi:10.1016/j.robot.2020.103600
ANSI (2018). Technical report—industrial robots and robot systems—safety requirements—testing methods for power & force limited collaborative applications, document ANSI RIA TR r15.806-2018. American National Standards Institute.
Antonelli, D., and Bruno, G. (2019). Dynamic distribution of assembly tasks in a collaborative workcell of humans and robots. FME Trans. 47 (4), 723–730. doi:10.5937/fmet1904723a
Antonelli, D., Zeng, Q. F., Aliev, K., and Liu, X. M. (2021). Robust assembly sequence generation in a human-robot collaborative workcell by reinforcement learning. FME Trans. 49 (4), 851–858. doi:10.5937/fme2104851a
Anwar, M., Al Khawli, T., Hussain, I., Gan, D. M., and Renda, F. (2019). Modeling and prototyping of a soft closed-chain modular gripper. Int. J. Robot. Res. Appl. 46 (1), 135–145. doi:10.1108/ir-09-2018-0180
Arntz, A., Strassmann, C., Völker, S., and Eimler, S. C. (2022). Collaborating eye to eye: effects of workplace design on the perception of dominance of collaboration robots. Front. Robot. AI 9, 999308. doi:10.3389/frobt.2022.999308
Arrais, R., Costa, C. M., Ribeiro, P., Rocha, L. F., Silva, M., and Veiga, G. (2021). On the development of a collaborative robotic system for industrial coating cells. Int. J. Adv. Manuf. Technol. 115 (3), 853–871. doi:10.1007/s00170-020-06167-z
Askarpour, M., Lestingi, L., Longoni, S., Iannacci, N., Rossi, M., and Vicentini, F. (2021). Formally-based model-driven development of collaborative robotic applications. J. Intell. Robot. Syst. 102 (3), 59. doi:10.1007/s10846-021-01386-2
Askarpour, M., Mandrioli, D., Rossi, M., and Vicentini, F. (2019). Formal model of human erroneous behavior for safety analysis in collaborative robotics. Robot. Comput. Integr. Manuf. 57, 465–476. doi:10.1016/j.rcim.2019.01.001
Association, R. I. (2012). ANSI/RIA R15. 06: 2012 Safety Requirements for industrial robots and robot systems. Ann Arbor.
Avalle, G., De Pace, F., Fornaro, C., Manuri, F., and Sanna, A. (2019). An augmented reality system to support fault visualization in industrial robotic tasks. IEEE Access 7, 132343–132359. doi:10.1109/access.2019.2940887
Aydin, Y., Sirintuna, D., and Basdogan, C. (2021). Towards collaborative drilling with a cobot using admittance controller. Trans. Inst. Meas. Control. 43 (8), 1760–1773. doi:10.1177/0142331220934643
Ayoubi, Y., Laribi, M. A., Arsicault, M., and Zeghloul, S. (2020). Safe pHRI via the variable stiffness safety-oriented mechanism (V2SOM): simulation and experimental validations. Appl. Sci. Basel 10 (11), 3810. doi:10.3390/app10113810
Ayoubi, Y., Laribi, M. A., Courrèges, F., Zeghloul, S., and Arsicault, M. (2018). Complete design methodology of biomimetic safety device for cobots' prismatic joints. Robot. Auton. Syst. 102, 44–53. doi:10.1016/j.robot.2018.01.008
Ayoubi, Y., Laribi, M. A., Zeghloul, S., and Arsicault, M. (2019). V2SOM: a novel safety mechanism dedicated to a cobot's rotary joints. Robot 8 (1), 18. doi:10.3390/robotics8010018
Ayvaci, Ö., Szulczynski, P., and Kielczewski, M. (2022). Identifying dynamic parameters with a novel software design for the M-DOF collaborative robot. IEEE Access 10, 24627–24637. doi:10.1109/access.2022.3151070
Badia, S. B. I., Silva, P. A., Branco, D., Pinto, A., Carvalho, C., Menezes, P., et al. (2022). Virtual reality for safe testing and development in collaborative robotics: challenges and perspectives. Electronics 11 (11), 1726. doi:10.3390/electronics11111726
Bagheri, E., De Winter, J., and Vanderborght, B. (2022). Transparent interaction based learning for human-robot collaboration. Front. Robot. AI 9, 754955. doi:10.3389/frobt.2022.754955
Balatti, P., Fusaro, F., Villa, N., Lamon, E., and Ajoudani, A. (2020). A collaborative robotic approach to autonomous pallet jack transportation and positioning. IEEE Access 8, 142191–142204. doi:10.1109/access.2020.3013382
Barbosa, G., Ledebour, C., De Oliveira, A. T., Rodrigues, I. R., Sadok, D., Kelner, J., et al. (2022). HOSA: an end-to-end safety system for human-robot interaction. J. Intell. Robot. Syst. 105 (4), 95. doi:10.1007/s10846-022-01701-5
Bauer, A., Wollherr, D., and Buss, M. (2008). Human–robot collaboration: a survey. Int. J. Humanoid Robot. 5 (01), 47–66. doi:10.1142/s0219843608001303
Baumgartner, M., Kopp, T., and Kinkel, S. (2022). Analysing factory workers' acceptance of collaborative robots: a web-based tool for company representatives. Electronics 11 (1), 145. doi:10.3390/electronics11010145
Bdiwi, M., Al, N. I., Halim, J., Bauer, S., Eichler, P., and Ihlenfeldt, S. (2022). Towards safety4.0: a novel approach for flexible human-robot-interaction based on safety-related dynamic finite-state machine with multilayer operation modes. Front. Robot. AI 9, 1002226. doi:10.3389/frobt.2022.1002226
Bednarczyk, M., Omran, H., and Bayle, B. (2022). EMG-based variable impedance control with passivity guarantees for collaborative robotics. IEEE Robot. Autom. Lett. 7 (2), 4307–4312. doi:10.1109/lra.2022.3149575
Behrens, R., Pliske, G., Umbreit, M., Piatek, S., Walcher, F., and Elkmann, N. (2022). A statistical model to determine biomechanical limits for physically safe interactions with collaborative robots. Front. Robot. AI 8, 667818. doi:10.3389/frobt.2021.667818
Benli, E., Spidalieri, R. L., and Motai, Y. (2019). Thermal multisensor fusion for collaborative robotics. IEEE Trans. Ind. Inf. 15 (7), 3784–3795. doi:10.1109/tii.2019.2908626
Berger, T., Bonte, T., Santin, J. J., and Sallez, Y. (2020). The concept of “safety bubble” for reconfigurable assembly systems. Manuf. Lett. 24, 77–81. doi:10.1016/j.mfglet.2020.03.015
Berx, N., Adriaensen, A., Decré, W., and Pintelon, L. (2022b). Assessing system-wide safety readiness for successful human-robot collaboration adoption. Safety 8 (3), 48. doi:10.3390/safety8030048
Berx, N., Decré, W., Morag, I., Chemweno, P., and Pintelon, L. (2022a). Identification and classification of risk factors for human-robot collaboration from a system-wide perspective. Comput. Ind. Eng. 163, 107827. doi:10.1016/j.cie.2021.107827
Bharti, S., and McGibney, A. (2022). CoRoL: a reliable framework for computation offloading in collaborative robots. IEEE Internet Things J. 9 (19), 18195–18207. doi:10.1109/jiot.2022.3155587
Bi, Z. M., Chen, B., Xu, L. D., Wu, C., Malott, C., Chamberlin, M., et al. (2022). Security and safety assurance of collaborative manufacturing in industry 4.0. Enterp. Inf. Syst. 16 (12). doi:10.1080/17517575.2021.2008512
Bi, Z. M., Lang, S. Y. T., and Wang, L. H. (2008). Improved control and simulation models of a tricycle collaborative robot. J. Intell. Manuf. 19 (6), 715–722. doi:10.1007/s10845-008-0122-4
Bi, Z. M., Luo, C. M., Miao, Z. H., Zhang, B., Zhang, W. J., and Wang, L. H. (2021). Safety assurance mechanisms of collaborative robotic systems in manufacturing. Robot. Comput. Integr. Manuf. 67, 102022. doi:10.1016/j.rcim.2020.102022
Bin Islam, S. O., Lughmani, W. A., Qureshi, W. S., Khalid, A., Mariscal, M. A., and Garcia-Herrero, S. (2019). Exploiting visual cues for safe and flexible cyber-physical production systems. Adv. Mech. Eng. 11 (12). doi:10.1177/1687814019897228
Birglen, L. (2019). Design of a partially-coupled self-adaptive robotic finger optimized for collaborative robots. Auton. Robot. 43 (2), 523–538. doi:10.1007/s10514-018-9802-x
Bloss, R. (2016). Collaborative robots are rapidly providing major improvements in productivity, safety, programing ease, portability and cost while addressing many new applications. Ind. Robot. Int. J. 43 (5), 463–468. doi:10.1108/ir-05-2016-0148
Bogataj, D., Battini, D., Calzavara, M., and Persona, A. (2019). The ageing workforce challenge: investments in collaborative robots or contribution to pension schemes, from the multi-echelon perspective. Int. J. Prod. Econ. 210, 97–106. doi:10.1016/j.ijpe.2018.12.016
Bogue, R. (2015). Sensors for robotic perception. Part one: human interaction and intentions. Ind. Robot. Int. J. 42 (5), 386–391. doi:10.1108/ir-05-2015-0098
Bogue, R. (2016a). Flexible and soft robotic grippers: the key to new markets? Ind Robot. Int. J. 43 (3), 258–263. doi:10.1108/ir-01-2016-0027
Bogue, R. (2016b). Europe continues to lead the way in the collaborative robot business. Int. J. 43 (1), 6–11. doi:10.1108/ir-10-2015-0195
Bogue, R. (2017). Robots that interact with humans: a review of safety technologies and standards. Ind. Robot. Int. J. 44 (4), 395–400. doi:10.1108/ir-04-2017-0070
Bogue, R. (2022). The changing face of the automotive robotics industry. Int. J. Robot. Res. Appl. 49 (3), 386–390. doi:10.1108/ir-01-2022-0022
Borboni, A., Elamvazuthi, I., and Cusano, N. (2022). EEG-based empathic safe cobot. Machines. 10 (8), 603. doi:10.3390/machines10080603
Borges, G. D., Reis, A. M., Neto, R. A., de Mattos, D. L., Cardoso, A., Goncalves, H., et al. (2021). Decision-making framework for implementing safer human-robot collaboration workstations: system dynamics modeling. Safety 7 (4), 75. doi:10.3390/safety7040075
Borregan-Alvarado, J., Alvarez-Meaza, I., Cilleruelo-Carrasco, E., and Rio-Belver, R. M. (2024). Human–robot interaction: predicting research agenda by long short-term memory. PeerJ Comput. Sci. 10, e2335. doi:10.7717/peerj-cs.2335
Bortolini, M., Ferrari, E., Gamberi, M., Pilati, F., and Faccio, M. (2017). Assembly system design in the Industry 4.0 era: a general framework. IFAC-Papersonline 50 (1), 5700–5705. doi:10.1016/j.ifacol.2017.08.1121
Boschetti, G., Bottin, M., Faccio, M., and Minto, R. (2021b). Multi-robot multi-operator collaborative assembly systems: a performance evaluation model. J. Intell. Manuf. 32 (5), 1455–1470. doi:10.1007/s10845-020-01714-7
Boschetti, G., Faccio, M., Milanese, M., and Minto, R. (2021a). C-ALB (Collaborative Assembly Line Balancing): a new approach in cobot solutions. Int. J. Adv. Manuf. Technol. 116 (9-10), 3027–3042. doi:10.1007/s00170-021-07565-7
Bounouar, M., Bearee, R., Siadat, A., and Benchekroun, T. H. (2022). On the role of human operators in the design process of cobotic systems. Cogn. Technol. Work 24 (1), 57–73. doi:10.1007/s10111-021-00691-y
Boy, E. S., Burdet, E., Teo, C. L., and Colgate, J. E. (2007). Investigation of motion guidance with scooter cobot and collaborative learning. IEEE Trans. Robot. 23 (2), 245–255. doi:10.1109/tro.2006.889488
Broum, T., and Simon, M. (2020). Safety requirements related to collaborative robots in the czech republic. MM Sci. J. 2020, 3852–3856. doi:10.17973/mmsj.2020_03_2019136
Bruno, G., and Antonelli, D. (2018). Dynamic task classification and assignment for the management of human-robot collaborative teams in workcells. Int. J. Adv. Manuf. Technol. 98 (9-12), 2415–2427. doi:10.1007/s00170-018-2400-4
Buchholz, B., Paquet, V., Punnett, L., Lee, D., and Moir, S. (1996). PATH: a work sampling-based approach to ergonomic job analysis for construction and other non-repetitive work. Appl. Ergon. 27 (3), 177–187. doi:10.1016/0003-6870(95)00078-x
Buerkle, A., Bamber, T., Lohse, N., and Ferreira, P. (2021). Feasibility of detecting potential emergencies in symbiotic human-robot collaboration with a mobile EEG. Robot. Comput. Integr. Manuf. 72, 102179. doi:10.1016/j.rcim.2021.102179
Cacace, J., Caccavale, R., Finzi, A., and Grieco, R. (2023). Combining human guidance and structured task execution during physical human-robot collaboration. J. Intell. Manuf. 34 (7), 3053–3067. doi:10.1007/s10845-022-01989-y
Cai, M., Liang, R. S., Luo, X. G., and Liu, C. L. (2023). Task allocation strategies considering task matching and ergonomics in the human-robot collaborative hybrid assembly cell. Int. J. Prod. Res. 61 (21), 7213–7232. doi:10.1080/00207543.2022.2147234
Callegari, M., Carbonari, L., Costa, D., Palmieri, G., Palpacelli, M. C., Papetti, A., et al. (2022). Tools and methods for human robot collaboration: case studies at i-LABS. Machines 10 (11), 997. doi:10.3390/machines10110997
Calvo, R., and Gil, P. (2022). Evaluation of collaborative robot sustainable integration in manufacturing assembly by using process time savings. Materials 15 (2), 611. doi:10.3390/ma15020611
Canfield, S. L., Owens, J. S., and Zuccaro, S. G. (2021). Zero moment control for lead-through teach programming and process monitoring of a collaborative welding robot. J. Mech. Robot. Trans. ASME 13 (3). doi:10.1115/1.4050102
Cardoso, A., Colim, A., Bicho, E., Braga, A. C., Menozzi, M., and Arezes, P. (2021). Ergonomics and human factors as a requirement to implement safer collaborative robotic workstations: a literature review. Safety 7 (4), 71. doi:10.3390/safety7040071
Carfi, A., Villalobos, J., Coronado, E., Bruno, B., and Mastrogiovanni, F. (2020). Can human-inspired learning behaviour facilitate human-robot interaction? Int. J. Soc. Robot. 12 (1), 173–186. doi:10.1007/s12369-019-00548-5
Carmichael, M. G., Liu, D. K., and Waldron, K. J. (2017). A framework for singularity-robust manipulator control during physical human-robot interaction. Int. J. Robot. Res. 36 (5-7), 861–876. doi:10.1177/0278364917698748
Caruana, L., and Francalanza, E. (2021). Safety 4.0 for collaborative robotics in the factories of the future. FME Trans. 49 (4), 842–850. doi:10.5937/fme2104842c
Casalino, A., Zanchettin, A. M., Piroddi, L., and Rocco, P. (2021). Optimal scheduling of human-robot collaborative assembly operations with time petri nets. IEEE Trans. Autom. Sci. Eng. 18 (1), 70–84. doi:10.1109/tase.2019.2932150
Castano-Cano, D., Grossard, M., and Hubert, A. (2022). Resonant sensors for multi-axis force and torque estimation in collaborative robotics. Mechatronics 82, 102703. doi:10.1016/j.mechatronics.2021.102703
Cencen, A., Verlinden, J. C., and Geraedts, J. M. P. (2018). Design methodology to improve human-robot coproduction in small- and medium-sized enterprises. IEEE-ASME Trans. Mechatronics 23 (3), 1092–1102. doi:10.1109/tmech.2018.2839357
Chacón, A., Ponsa, P., and Angulo, C. (2021). Cognitive interaction analysis in human-robot collaboration using an assembly task. Electronics 10 (11), 1317. doi:10.3390/electronics10111317
Chan, C. C., and Tsai, C. C. (2020). Collision-Free speed alteration strategy for human safety in human-robot coexistence environments. IEEE Access 8, 80120–80133. doi:10.1109/access.2020.2988654
Chemweno, P., Pintelon, L., and Decre, W. (2020). Orienting safety assurance with outcomes of hazard analysis and risk assessment: a review of the ISO 15066 standard for collaborative robot systems. Saf. Sci. 129, 104832. doi:10.1016/j.ssci.2020.104832
Chen, N., Huang, N. J., Radwin, R., and Li, J. S. (2022). Analysis of assembly-time performance (ATP) in manufacturing operations with collaborative robots: a systems approach. Int. J. Prod. Res. 60 (1), 277–296. doi:10.1080/00207543.2021.2000060
Chen, Q. L., Heydari, B., and Moghaddam, M. (2021). Leveraging task modularity in reinforcement learning for adaptable industry 4.0 automation. J. Mech. Des. 143 (7). doi:10.1115/1.4049531
Chen, S. X., Luo, M. Z., Jiang, G. W., and Abdelaziz, O. (2018). Collaborative robot zero moment control for direct teaching based on self-measured gravity and friction. Int. J. Adv. Robot. Syst. 15 (6). doi:10.1177/1729881418808711
Cheng, C. A., Mukadam, M., Issac, J., Birchfield, S., Fox, D., Boots, B., et al. (2021). RMPflow: a geometric framework for generation of multitask motion policies. IEEE Trans. Autom. Sci. Eng. 18 (3), 968–987. doi:10.1109/tase.2021.3053422
Cheraghi, M., Shahrabi-Farahani, M., and Moussavi-Najarkola, S. A. (2019). Ergonomic risk factors evaluation of work-related musculoskeletal disorders by PATH and MMH in a construction industry. Iran. J. Health Saf. Environ. 6 (1), 1175–1189.
Cherubini, A., Passama, R., Crosnier, A., Lasnier, A., and Fraisse, P. (2016). Collaborative manufacturing with physical human-robot interaction. Robot. Comput. Integr. Manuf. 40, 1–13. doi:10.1016/j.rcim.2015.12.007
Cherubini, A., Passama, R., Navarro, B., Sorour, M., Khelloufi, A., Mazhar, O., et al. (2019). A collaborative robot for the factory of the future: BAZAR. Int. J. Adv. Manuf. Technol. 105 (9), 3643–3659. doi:10.1007/s00170-019-03806-y
Chiriatti, G., Ciccarelli, M., Forlini, M., Franchini, M., Palmieri, G., Papetti, A., et al. (2022). Human-Centered design of a collaborative robotic system for the shoe-polishing process. Machines 10 (11), 1082. doi:10.3390/machines10111082
Chiriatti, G., Palmieri, G., Scoccia, C., Palpacelli, M. C., and Callegari, M. (2021). Adaptive obstacle avoidance for a class of collaborative robots. Machines 9 (6), 113. doi:10.3390/machines9060113
Chiu, W.-T., and Ho, Y.-S. (2007). Bibliometric analysis of tsunami research. Scientometrics 73 (1), 3–17. doi:10.1007/s11192-005-1523-1
Chromjakova, F., Trentesaux, D., and Kwarteng, M. A. (2021). Human and cobot cooperation ethics: the process management concept of the production workplace. J. Compet. 13 (3), 21–38. doi:10.7441/joc.2021.03.02
Chu, X., Yan, P., Zhang, N., Feng, L., Guo, K., Lu, C., et al. (2021). A bibliometric analysis of overall and top 100 most-cited studies about robotic surgery versus open surgery. Surg. Innov. 29 (2), 203–214. doi:10.1177/15533506211026411
Chuang, Y. J., Chang, H., Sun, Y. T., and Tsung, T. T. (2022). Stick-slip in hand guidance of palletizing robot as collaborative robot. Int. J. Adv. Robot. Syst. 19 (5), 172988062211311. doi:10.1177/17298806221131138
Cohen, Y., Shoval, S., Faccio, M., and Minto, R. (2022). Deploying cobots in collaborative systems: major considerations and productivity analysis. Int. J. Prod. Res. 60 (6), 1815–1831. doi:10.1080/00207543.2020.1870758
J. E. Colgate, W. Wannasuphoprasit, and M. A. Peshkin (1996). Cobots: robots for collaboration with human operators. ASME international mechanical engineering congress and exposition (American Society of Mechanical Engineers).
Colim, A., Faria, C., Braga, A. C., Sousa, N., Rocha, L., Carneiro, P., et al. (2020). Towards an ergonomic assessment framework for industrial assembly workstations-A case study. Appl. Sci. Basel 10 (9), 3048. doi:10.3390/app10093048
Colim, A., Faria, C., Cunha, J., Oliveira, J., Sousa, N., and Rocha, L. A. (2021c). Physical ergonomic improvement and safe design of an assembly workstation through collaborative robotics. Safety 7 (1), 14. doi:10.3390/safety7010014
Colim, A., Morgado, R., Carneiro, P., Costa, N., Faria, C., Sousa, N., et al. (2021b). Lean manufacturing and ergonomics integration: defining productivity and wellbeing indicators in a human-robot workstation. Sustainability 13 (4), 1931. doi:10.3390/su13041931
Colim, A., Portugal, R. M., Dinis-Carvalho, J., and Sousa, N. (2021a). An empirical study of the work conditions and productive performance after collaborative robotics implementation in a manufacturing assembly process. FME Trans. 49 (4), 859–866. doi:10.5937/fme2104859C
Comari, S., Di Leva, R., Carricato, M., Badini, S., Carapia, A., Collepalumbo, G., et al. (2022). Mobile cobots for autonomous raw-material feeding of automatic packaging machines. J. Manuf. Syst. 64, 211–224. doi:10.1016/j.jmsy.2022.06.007
Conti, C. J., Varde, A. S., and Wang, W. T. (2022). Human-robot collaboration with commonsense reasoning in smart manufacturing contexts. IEEE Trans. Autom. Sci. Eng. 19 (3), 1784–1797. doi:10.1109/tase.2022.3159595
Cornak, M., Toelgyessy, M., and Hubinsky, P. (2022). Innovative collaborative method for interaction between a human operator and robotic manipulator using pointing gestures. Appl. Sci. Basel 12 (1). doi:10.3390/app12010258
Costanzo, M., De Maria, G., Lettera, G., and Natale, C. (2022). A multimodal approach to human safety in collaborative robotic workcells. IEEE Trans. Autom. Sci. Eng. 19 (2), 1202–1216. doi:10.1109/tase.2020.3043286
Coupeté, E., Moutarde, F., and Manitsaris, S. (2019). Multi-users online recognition of technical gestures for natural human-robot collaboration in manufacturing. Auton. Robot. 43 (6), 1309–1325. doi:10.1007/s10514-018-9704-y
Courreges, F., Laribi, M. A., Arsicault, M., Absi, J., and Zeghloul, S. (2019). In vivo and in vitro comparative assessment of the log-linearized Hunt-Crossley model for impact-contact modeling in physical human-robot interactions. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 233 (10), 1376–1391. doi:10.1177/0959651819834750
Cramer, M., Kellens, K., and Demeester, E. (2021). Probabilistic decision model for adaptive task planning in human-robot collaborative assembly based on designer and operator intents. IEEE Robot. Autom. Lett. 6 (4), 7325–7332. doi:10.1109/lra.2021.3095513
Cui, Z. Y., Rahman, M. A., Hai, T., Yao, L., Du, P. X., and Yaseen, Z. M. (2021). Need for developing a security robot-based risk management for emerging practices in the workplace using the Advanced Human-Robot Collaboration Model. Work A J. Prev. Assess. Rehabil. 68 (3), 825–834. doi:10.3233/wor-203416
Cusano, N. (2023). Cobot and sobot: for a new ontology of collaborative and social robots. Found. Sci. 28 (4), 1143–1155. doi:10.1007/s10699-022-09860-2
Czubenko, M., and Kowalczuk, Z. (2021). A simple neural network for collision detection of collaborative robots. Sensors 21 (12), 4235. doi:10.3390/s21124235
Dahl, M., Bengtsson, K., and Falkman, P. (2021). Application of the sequence planner control framework to an intelligent automation system with a focus on error handling. Machines 9 (3), 59. doi:10.3390/machines9030059
Dahl, M., Eros, E., Bengtsson, K., Fabian, M., and Falkman, P. (2022a). Sequence planner: a framework for control of intelligent automation systems. Appl. Sci. Basel 12 (11), 5433. doi:10.3390/app12115433
Dahl, M., Larsen, C., Eros, E., Bengtsson, K., Fabian, M., and Falkman, P. (2022b). Interactive formal specification for efficient preparation of intelligent automation systems. CIRP J. Manuf. Sci. Technol. 38, 129–138. doi:10.1016/j.cirpj.2022.04.013
Darvish, K., Simetti, E., Mastrogiovanni, F., and Casalino, G. (2021). A hierarchical architecture for human-robot cooperation processes. IEEE Trans. Robot. 37 (2), 567–586. doi:10.1109/tro.2020.3033715
Darvish, K., Wanderlingh, F., Bruno, B., Simetti, E., Mastrogiovanni, F., and Casalino, G. (2018). Flexible human-robot cooperation models for assisted shop-floor tasks. Mechatronics 51, 97–114. doi:10.1016/j.mechatronics.2018.03.006
da Silva, E. R., Schou, C., Hjorth, S., Tryggvason, F., and Sorensen, M. S. (2022). Plug & Produce robot assistants as shared resources: a simulation approach. J. Manuf. Syst. 63, 107–117. doi:10.1016/j.jmsy.2022.03.004
De Coninck, E., Verbelen, T., Van Molle, P., Simoens, P., and Dhoedt, B. (2020). Learning robots to grasp by demonstration. Robot. Auton. Syst. 127, 103474. doi:10.1016/j.robot.2020.103474
Dehio, N., Smith, J., Wigand, D. L., Mohammadi, P., Mistry, M., and Steil, J. J. (2022). Enabling impedance-based physical human-multi-robot collaboration: experiments with four torque-controlled manipulators. Int. J. Robot. Res. 41 (1), 68–84. doi:10.1177/02783649211053650
De Winter, J., De Beir, A., El Makrini, I., van de Perre, G., Nowé, A., and Vanderborght, B. (2019). Accelerating interactive reinforcement learning by human advice for an assembly task by a cobot. Robot 8 (4), 104. doi:10.3390/robotics8040104
Dguv, GSAI (2017). “‘DGUV-information—collaborative robot systems. Design of systems with ‘power and force limiting’ function,” in Fachbereich Holz und Metall (Germany: German Social Accident Insurance), 11–12.
Digo, E., Antonelli, M., Cornagliotto, V., Pastorelli, S., and Gastaldi, L. (2020). Collection and analysis of human upper limbs motion features for collaborative robotic applications. Robot 9 (2), 33. doi:10.3390/robotics9020033
Dmytriyev, Y., Insero, F., Carnevale, M., and Giberti, H. (2022). Brain-Computer interface and hand-guiding control in a human-robot collaborative assembly task. Machines 10 (8), 654. doi:10.3390/machines10080654
Dong, S. Q., Pan, X. A., and Wang, H. G. (2022). An improved equivalent impact model of human thorax for human-robot collaboration. Int. J. Intell. Robot. Appl. 6 (3), 426–436. doi:10.1007/s41315-021-00213-z
dos Santos, M. C., Palácios, R. H. C., Mendonça, M., Fabri, J. A., and Godoy, W. F. (2022). A neural autonomous robotic manipulator with three degrees of freedom. Int. J. Intell. Syst. 37 (9), 5597–5616. doi:10.1002/int.22803
Dou, S. X., Xiao, J. L., Zhao, W., Yuan, H., and Liu, H. T. (2022). A robot skill learning framework based on compliant movement primitives. J. Intell. Robot. Syst. 104 (3), 53. doi:10.1007/s10846-022-01605-4
Douthwaite, J. A., Lesage, B., Gleirscher, M., Calinescu, R., Aitken, J. M., Alexander, R., et al. (2021). A modular digital twinning framework for safety assurance of collaborative robotics. Front. Robot. AI 8, 758099. doi:10.3389/frobt.2021.758099
D'Souza, F., Costa, J., and Pires, J. N. (2020). Development of a solution for adding a collaborative robot to an industrial AGV. Ind Robot. Int. J. Robot. Res. Appl. 47 (5), 723–735. doi:10.1108/IR-01-2020-0004
Dufour, K., Ocampo-Jimenez, J., and Suleiman, W. (2020). Visual-spatial attention as a comfort measure in human-robot collaborative tasks. Robot. Auton. Syst. 133, 103626. doi:10.1016/j.robot.2020.103626
Dzedzickis, A., Subaciute-Zemaitiene, J., Sutinys, E., Samukaite-Bubniene, U., and Bucinskas, V. (2022). Advanced applications of industrial robotics: new trends and possibilities. Appl. Sci. Basel 12 (1). doi:10.3390/app12010135
Eberle, H., Nasuto, S. J., and Hayashi, Y. (2020). Synchronization-based control for a collaborative robot. R. Soc. Open Sci. 7 (12), 201267. doi:10.1098/rsos.201267
Ebrahimzadeh, A., Chowdhury, M., and Maier, M. (2019). Human-agent-robot task coordination in FiWi-based tactile Internet infrastructures using context- and self-awareness. IEEE Trans. Netw. Serv. Manag. 16 (3), 1127–1142. doi:10.1109/tnsm.2019.2922904
Eimontaite, I., Cameron, D., Rolph, J., Mokaram, S., Aitken, J. M., Gwilt, I., et al. (2022). Dynamic graphical instructions result in improved attitudes and decreased task completion time in human-robot Co-working: an experimental manufacturing study. Sustainability 14 (6), 3289. doi:10.3390/su14063289
Eimontaite, I., Gwilt, I., Cameron, D., Aitken, J. M., Rolph, J., Mokaram, S., et al. (2019). Language-free graphical signage improves human performance and reduces anxiety when working collaboratively with robots. Int. J. Adv. Manuf. Technol. 100 (1-4), 55–73. doi:10.1007/s00170-018-2625-2
El, Z. S., Wang, Y. Q., Hu, Y. D., and Li, W. D. (2022). An improved approach of task-parameterized learning from demonstrations for cobots in dynamic manufacturing. J. Intell. Manuf. 33 (5), 1503–1519. doi:10.1007/s10845-021-01743-w
El, Z. S., Wang, Y. Q., Li, W. D., and Peng, Y. Q. (2021). iTP-LfD: improved task parametrised learning from demonstration for adaptive path generation of cobot. Robot. Comput. Integr. Manuf. 69, 102109. doi:10.1016/j.rcim.2020.102109
El Aswad, F., Djogdom, G. V. T., Otis, M. J. D., Ayena, J. C., and Meziane, R. (2021). Image generation for 2D-CNN using time-series signal features from foot gesture applied to select cobot operating mode. Sensors 21 (17), 5743. doi:10.3390/s21175743
Elguea-Aguinaco, I., Serrano-Muñoz, A., Chrysostomou, D., Inziarte-Hidalgo, I., Bogh, S., and Arana-Arexolaleiba, N. (2022). Goal-conditioned reinforcement learning within a human-robot disassembly environment. Appl. Sci. Basel 12 (22), 11610. doi:10.3390/app122211610
El Makrini, I., Mathijssen, G., Verhaegen, S., Verstraten, T., and Vanderborght, B. (2022). A virtual element-based postural optimization method for improved ergonomics during human-robot collaboration. IEEE Trans. Autom. Sci. Eng. 19 (3), 1772–1783. doi:10.1109/tase.2022.3147702
El Makrini, I., Merckaert, K., De Winter, J., Lefeber, D., and Vanderborght, B. (2019). Task allocation for improved ergonomics in human-robot collaborative assembly. Interact. Stud. 20 (1), 102–133. doi:10.1075/is.18018.mak
El Makrini, I., Rodriguez-Guerrero, C., Lefeber, D., and Vanderborght, B. (2017). The variable boundary layer sliding mode control: a safe and performant control for compliant joint manipulators. IEEE Robot. Autom. Lett. 2 (1), 1–92. doi:10.1109/lra.2016.2587059
El Zaatari, S., Li, W. D., and Usman, Z. (2021). Ring Gaussian mixture modelling and regression for collaborative robots. Robot. Auton. Syst. 145, 103864. doi:10.1016/j.robot.2021.103864
El Zaatari, S., Marei, M., Li, W. D., and Usman, Z. (2019). Cobot programming for collaborative industrial tasks: an overview. Robot. Auton. Syst. 116, 162–180. doi:10.1016/j.robot.2019.03.003
Eyam, A. T., Mohammed, W. M., and Lastra, J. L. M. (2021). Emotion-Driven analysis and control of human-robot interactions in collaborative applications. Sensors 21 (14), 4626. doi:10.3390/s21144626
Faccio, M., Bottin, M., and Rosati, G. (2019). Collaborative and traditional robotic assembly: a comparison model. Int. J. Adv. Manuf. Technol. 102 (5-8), 1355–1372. doi:10.1007/s00170-018-03247-z
Faccio, M., Minto, R., Rosati, G., and Bottin, M. (2020). The influence of the product characteristics on human-robot collaboration: a model for the performance of collaborative robotic assembly. Int. J. Adv. Manuf. Technol. 106 (5-6), 2317–2331. doi:10.1007/s00170-019-04670-6
Fager, P., Calzavara, M., and Sgarbossa, F. (2020). Modelling time efficiency of cobot-supported kit preparation. Int. J. Adv. Manuf. Technol. 106 (5-6), 2227–2241. doi:10.1007/s00170-019-04679-x
Fager, P., Sgarbossa, F., and Calzavara, M. (2021). Cost modelling of onboard cobot-supported item sorting in a picking system. Int. J. Prod. Res. 59 (11), 3269–3284. doi:10.1080/00207543.2020.1854484
Faibish, T., Kshirsagar, A., Hoffman, G., and Edan, Y. (2022). Human preferences for robot eye gaze in human-to-robot handovers. Int. J. Soc. Robot. 14 (4), 995–1012. doi:10.1007/s12369-021-00836-z
Farsoni, S., Ferraguti, F., and Bonfè, M. (2019). Safety-oriented robot payload identification using collision-free path planning and decoupling motions. Robot. Comput. Integr. Manuf. 59, 189–200. doi:10.1016/j.rcim.2019.04.011
Farsoni, S., Rizzi, J., Ufondu, G. N., and Bonfè, M. (2022). Planning collision-free robot motions in a human-robot shared workspace via mixed reality and sensor-fusion skeleton tracking. Electronics 11 (15), 2407. doi:10.3390/electronics11152407
Faulring, E. L., Colgate, J. E., and Peshkin, M. A. (2006). The cobotic hand controller: design, control and performance of a novel haptic display. Int. J. Robot. Res. 25 (11), 1099–1119. doi:10.1177/0278364906072094
Faulring, E. L., Lynch, K. M., Colgate, J. E., and Peshkin, M. A. (2007). Haptic display of constrained dynamic systems via admittance displays. IEEE Trans. Robot. 23 (1), 101–111. doi:10.1109/tro.2006.886837
Fernández, J. D., Yu, B. B., Bargsten, V., Zipper, M., and Sprengel, H. (2020). Design, modelling and control of novel series-elastic actuators for industrial robots. Actuators 9 (1), 6. doi:10.3390/act9010006
Ferraguti, F., Bertuletti, M., Landi, C. T., Bonfe, M., Fantuzzi, C., and Secchi, C. (2020). A control barrier function approach for maximizing performance while fulfilling to ISO/TS 15066 regulations. IEEE Robot. Autom. Lett. 5 (4), 5921–5928. doi:10.1109/lra.2020.3010494
Ferreira, C., Figueira, G., and Amorim, P. (2021). Scheduling Human-Robot Teams in collaborative working cells. Int. J. Prod. Econ. 235, 108094. doi:10.1016/j.ijpe.2021.108094
Fischer, H., Vulliez, M., Laguillaumie, P., Vulliez, P., and Gazeau, J. P. (2019). RTRobMultiAxisControl: a framework for real-time multiaxis and multirobot control. IEEE Trans. Autom. Sci. Eng. 16 (3), 1205–1217. doi:10.1109/tase.2018.2889813
Fogli, D., Gargioni, L., Guida, G., and Tampalini, F. (2022). A hybrid approach to user-oriented programming of collaborative robots. Robot. Comput. Integr. Manuf. 73, 102234. doi:10.1016/j.rcim.2021.102234
Fournier, É., Kilgus, D., Landry, A., Hmedan, B., Pellier, D., Fiorino, H., et al. (2022). The impacts of human-cobot collaboration on perceived cognitive load and usability during an industrial task: an exploratory experiment. IISE Trans. Occup. Ergon. Hum. Factors 10 (2), 83–90. doi:10.1080/24725838.2022.2072021
Fraga-Lamas, P., Barros, D., Lopes, S. I., and Fernández-Caramés, T. M. (2022). Mist and edge computing cyber-physical human-centered systems for industry 5.0: a cost-effective IoT thermal imaging safety system. Sensors 22 (21), 8500. doi:10.3390/s22218500
Fu, B., and Cai, G. W. (2022). Design and optimization of a joint torque sensor with small crosstalk error for robots. Meas. (. Mahwah. N. J). 200, 111629. doi:10.1016/j.measurement.2022.111629
Fu, L., and Zhao, J. (2020). Maxwell model-based null space compliance control in the task-priority framework for redundant manipulators. IEEE Access 8, 35892–35904. doi:10.1109/access.2020.2975125
Gajsek, B., Stradovnik, S., and Hace, A. (2020). Sustainable move towards flexible, robotic, human-involving workplace. Sustainability 12 (16), 6590. doi:10.3390/su12166590
Gallala, A., Kumar, A. A., Hichri, B., and Plapper, P. (2022). Digital twin for human-robot interactions by means of industry 4.0 enabling technologies. Sensors 22 (13), 4950. doi:10.3390/s22134950
Gandarias, J. M., Wang, Y. J., Stilli, A., García-Cerezo, A. J., Gómez-de-Gabriel, J. M., and Wurdemann, H. A. (2020). Open-loop position control in collaborative, modular variable-stiffness-link (VSL) robots. IEEE Robot. Autom. Lett. 5 (2), 1772–1779. doi:10.1109/lra.2020.2969943
Gauss, L., Lacerda, D. P., Cauchick-Miguel, P. A., and Sellitto, M. A. (2022). Market-driven modularity: an empirical application in the design of a family of autonomous mobile palletizers. Int. J. Adv. Manuf. Technol. 123 (3-4), 1377–1400. doi:10.1007/s00170-022-10128-z
Ge, C. Y., Wang, Z. L., Liu, Z., Wu, T. H., Wang, S., Ren, X. Y., et al. (2022). A capacitive and piezoresistive hybrid sensor for long-distance proximity and wide-range force detection in human-robot collaboration. Adv. Intell. Syst. 4 (3). doi:10.1002/aisy.202100213
Geiger, M., and Waldschmidt, C. (2019). 160-GHz radar proximity sensor with distributed and flexible antennas for collaborative robots. IEEE Access 7, 14977–14984. doi:10.1109/access.2019.2891909
Gervasi, R., Mastrogiaconno, L., and Franceschini, F. (2020). A conceptual framework to evaluate human-robot collaboration. Int. J. Adv. Manuf. Technol. 108 (3), 841–865. doi:10.1007/s00170-020-05363-1
Ghadirzadeh, A., Chen, X., Yin, W. J., Yi, Z. R., Björkman, M., and Kragic, D. (2021). Human-Centered collaborative robots with deep reinforcement learning. IEEE Robot. Autom. Lett. 6 (2), 566–571. doi:10.1109/lra.2020.3047730
Ghidini, S., Beschi, M., and Pedrocchi, N. (2020). A robust linear control strategy to enhance damping of a series elastic actuator on a collaborative robot. J. Intell. Robot. Syst. 98 (3-4), 627–641. doi:10.1007/s10846-019-01071-5
Giberti, H., Abbattista, T., Carnevale, M., Giagu, L., and Cristini, F. (2022). A methodology for flexible implementation of collaborative robots in smart manufacturing systems. Robot 11 (1), 9. doi:10.3390/robotics11010009
Gideoni, R., Honig, S., and Oron-Gilad, T. (2022). Is it personal? The impact of personally relevant robotic failures (PeRFs) on humans' trust, likeability, and willingness to use the robot. Int. J. Soc. Robot. 16, 1049–1067. doi:10.1007/s12369-022-00912-y
Gillespie, R. B., Colgate, J. E., and Peshkin, M. A. (2001). A general framework for cobot control. IEEE Trans. Robot. Autom. 17 (4), 391–401. doi:10.1109/70.954752
Girbés-Juan, V., Schettino, V., Gracia, L., Solanes, J. E., Demiris, Y., and Tornero, J. (2022). Combining haptics and inertial motion capture to enhance remote control of a dual-arm robot. J. Multimodal User Interfaces 16 (2), 219–238. doi:10.1007/s12193-021-00386-8
Gjeldum, N., Aljinovic, A., Zizic, M. C., and Mladineo, M. (2022). Collaborative robot task allocation on an assembly line using the decision support system. Int. J. Comput. Integr. Manuf. 35 (4-5), 510–526. doi:10.1080/0951192x.2021.1946856
Gleirscher, M., Calinescu, R., Douthwaite, J., Lesage, B., Paterson, C., Aitken, J., et al. (2022). Verified synthesis of optimal safety controllers for human-robot collaboration. Sci. Comput. Program 218, 102809. doi:10.1016/j.scico.2022.102809
Gracia, L., Solanes, J. E., Muñoz-Benavent, P., Miro, J. V., Perez-Vidal, C., and Tornero, J. (2018). Adaptive sliding mode control for robotic surface treatment using force feedback. Mechatronics 52, 102–118. doi:10.1016/j.mechatronics.2018.04.008
Gracia, L., Solanes, J. E., Muñoz-Benavent, P., Miro, J. V., Perez-Vidal, C., and Tornero, J. (2019). Human-robot collaboration for surface treatment tasks. Interact. Stud. 20 (1), 148–184. doi:10.1075/is.18010.gra?locatt=mode:legacy
Gradolewski, D., Maslowski, D., Dziak, D., Jachimezyk, B., Mundlamuri, S. T., Prakash, C. G., et al. (2020). A distributed computing real-time safety system of collaborative robot. Elektron. Elektrotech. 26 (2), 4–14. doi:10.5755/j01.eie.26.2.25757
Grushko, S., Vysocky, A., Suder, J., Glogar, L., and Bobovsky, Z. (2021). Improving human awareness during collaboration with robot: review. MM Sci. J. 2021, 5475–5480. doi:10.17973/mmsj.2021_12_2021181
Gualtieri, L., Fraboni, F., De Marchi, M., and Rauch, E. (2022a). Development and evaluation of design guidelines for cognitive ergonomics in human-robot collaborative assembly systems. Appl. Ergon. 104, 103807. doi:10.1016/j.apergo.2022.103807
Gualtieri, L., Palomba, I., Merati, F. A., Rauch, E., and Vidoni, R. (2020). Design of human-centered collaborative assembly workstations for the improvement of operators' physical ergonomics and production efficiency: a case study. Sustainability 12 (9), 3606. doi:10.3390/su12093606
Gualtieri, L., Rauch, E., and Vidoni, R. (2021a). Emerging research fields in safety and ergonomics in industrial collaborative robotics: a systematic literature review. Robot. Comput. Integr. Manuf. 67, 101998. doi:10.1016/j.rcim.2020.101998
Gualtieri, L., Rauch, E., and Vidoni, R. (2021b). Methodology for the definition of the optimal assembly cycle and calculation of the optimized assembly cycle time in human-robot collaborative assembly. Int. J. Adv. Manuf. Technol. 113 (7-8), 2369–2384. doi:10.1007/s00170-021-06653-y
Gualtieri, L., Rauch, E., and Vidoni, R. (2022b). Development and validation of guidelines for safety in human-robot collaborative assembly systems. Comput. Ind. Eng. 163, 107801. doi:10.1016/j.cie.2021.107801
Guda, V., Mugisha, S., Chevallereau, C., Zoppi, M., Molfino, R., and Chablat, D. (2022). Motion strategies for a cobot in a context of intermittent haptic interface. J. Mech. Robot. Trans. ASME. 14 (4). doi:10.1115/1.4054509
Guerra, E., Munguia, R., Bolea, Y., and Grau, A. (2016). Human collaborative localization and mapping in indoor environments with non-continuous stereo. Sensors 16 (3), 275. doi:10.3390/s16030275
Guidi, S., Marchigiani, E., Roncato, S., and Parlangeli, O. (2021). Human beings and robots: are there any differences in the attribution of punishments for the same crimes? Behav. Inf. Technol. 40 (5), 445–453. doi:10.1080/0144929x.2021.1905879
Halim, J., Eichler, P., Krusche, S., Bdiwi, M., and Ihlenfeldt, S. (2022). No-code robotic programming for agile production: a new markerless-approach for multimodal natural interaction in a human-robot collaboration context. Front. Robot. AI 9, 1001955. doi:10.3389/frobt.2022.1001955
Hanna, A., Larsson, S., Gotvall, P. L., and Bengtsson, K. (2022). Deliberative safety for industrial intelligent human–robot collaboration: regulatory challenges and solutions for taking the next step towards industry 4.0. Comput. Integr. Manuf. 78, 102386. doi:10.1016/j.rcim.2022.102386
Havard, V., Jeanne, B., Lacomblez, M., and Baudry, D. (2019). Digital twin and virtual reality: a co-simulation environment for design and assessment of industrial workstations. Prod. Manuf. Res. Open Access J. 7 (1), 472–489. doi:10.1080/21693277.2019.1660283
Hayakawa, S., Wan, W. W., Koyama, K., and Harada, K. (2022). A dual-arm robot that autonomously lifts up and tumbles heavy plates using crane pulley blocks. IEEE Trans. Autom. Sci. Eng. 19 (4), 3444–3458. doi:10.1109/tase.2021.3121586
Heng, W. Z., Yang, G., Pang, G. Y., Ye, Z. Q., Lv, H. H., Du, J., et al. (2021). Fluid-Driven soft CoboSkin for safer human-robot collaboration: fabrication and adaptation. Adv. Intell. Syst. 3 (3). doi:10.1002/aisy.202170030
Hentout, A., Aouache, M., Maoudj, A., and Akli, I. (2019). Human-robot interaction in industrial collaborative robotics: a literature review of the decade 2008-2017. Adv. Robot. 33 (15-16), 764–799. doi:10.1080/01691864.2019.1636714
Heo, Y. J., Kim, D., Lee, W., Kim, H., Park, J., and Chung, W. K. (2019). Collision detection for industrial collaborative robots: a deep learning approach. IEEE Robot. Autom. Lett. 4 (2), 740–746. doi:10.1109/lra.2019.2893400
Heredia, J., Schlette, C., and Kjaergaard, M. B. (2021). Data-Driven energy estimation of individual instructions in user-defined robot programs for collaborative robots. IEEE Robot. Autom. Lett. 6 (4), 6836–6843. doi:10.1109/lra.2021.3094781
Herrero, H., Abou Moughlbay, A., Outón, J. L., Sallé, D., and de Ipiña, K. L. (2017). Skill based robot programming: assembly, vision and Workspace Monitoring skill interaction. Neurocomputing 255, 61–70. doi:10.1016/j.neucom.2016.09.133
Hignett, S., and McAtamney, L. (2000). Rapid entire body assessment (REBA). Appl. Ergon. 31 (2), 201–205. doi:10.1016/s0003-6870(99)00039-3
Hofer, D. P., and Strohmeier, F. (2019). Multilingual speech control for ROS-driven robots. Elektrotech. Inf. Tech. 136 (7), 334–340. doi:10.1007/s00502-019-00739-y
Hopko, S. K., Khurana, R., Mehta, R. K., and Pagilla, P. R. (2021). Effect of cognitive fatigue, operator sex, and robot assistance on task performance metrics, workload, and situation awareness in human-robot collaboration. IEEE Robot. Autom. Lett. 6 (2), 3049–3056. doi:10.1109/lra.2021.3062787
Hopko, S. K., and Mehta, R. K. (2024). Trust in shared-space collaborative robots: shedding light on the human brain. Hum. Factors. 66 (2), 490–509. doi:10.1177/00187208221109039
Hostettler, D., Mayer, S., and Hildebrand, C. (2022). Human-like movements of industrial robots positively impact observer perception. Int. J. Soc. Robot. 15, 1399–1417. doi:10.1007/s12369-022-00954-2
Hu, M. W., Wang, H. G., and Pan, X. N. (2020a). Multi-objective global optimum design of collaborative robots. Struct. Multidiscip. Optim. 62 (3), 1547–1561. doi:10.1007/s00158-020-02563-x
Hu, M. W., Wang, H. G., and Pan, X. N. (2020b). Optimal configuration selection for stiffness identification of 7-Dof collaborative robots. Intell. Serv. Robot. 13 (3), 379–391. doi:10.1007/s11370-020-00322-x
Hu, M. W., Wang, H. G., Pan, X. N., and Tian, Y. (2019). Optimal synthesis of pose repeatability for collaborative robots based on the ISO 9283 standard. Int. J. Robot. Res. Appl. 46 (6), 812–818. doi:10.1108/ir-03-2019-0056
Huang, J., Pham, D. T., Li, R. Y., Qu, M., Wang, Y. J., Kerin, M., et al. (2021). An experimental human-robot collaborative disassembly cell. Comput. Ind. Eng. 155, 107189. doi:10.1016/j.cie.2021.107189
Huang, J., Pham, D. T., Wang, Y. J., Ji, C. Q., Xu, W. J., Liu, Q., et al. (2019). A strategy for human-robot collaboration in taking products apart for remanufacture. FME Trans. 47 (4), 731–738. doi:10.5937/fmet1904731h
Huang, J., Pham, D. T., Wang, Y. J., Qu, M., Ji, C. Q., Su, S. Z., et al. (2020). A case study in human-robot collaboration in the disassembly of press-fitted components. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 234 (3), 654–664. doi:10.1177/0954405419883060
Huang, S. F., Gao, M., Liu, L., Chen, J. H., and Zhang, J. W. (2022). Collision detection for cobots: a back-input compensation approach. IEEE-ASME Trans. Mechatronics. 27 (6), 4951–4962. doi:10.1109/tmech.2022.3169084
Husing, E., Weidemann, C., Lorenz, M., Corves, B., and Hüsing, M. (2021). Determining robotic assistance for inclusive workplaces for people with disabilities. Robot 10 (1), 44. doi:10.3390/robotics10010044
Ibáñez, V. R., Pujol, F. A., Ortega, S. G., and Perpiñán, J. M. S. (2021). Collaborative robotics in wire harnesses spot taping process. Comput. Ind. 125, 103370. doi:10.1016/j.compind.2020.103370
Ibarguren, A., Eimontaite, I., Outón, J. L., and Fletcher, S. (2020). Dual arm Co-manipulation architecture with enhanced human-robot communication for large Part Manipulation. Sensors 20 (21), 6151. doi:10.3390/s20216151
Inoue, S., Urata, A., Kodama, T., Huwer, T., Maruyama, Y., Fujita, S., et al. (2021). High-precision mobile robotic manipulator for reconfigurable manufacturing systems. Int. J. Autom. Technol. 15 (5), 651–660. doi:10.20965/ijat.2021.p0651
Ionescu, T. B., and Schlund, S. (2022). Programming cobots by voice: a pragmatic, web-based approach. Int. J. Comput. Integr. Manuf. 36, 86–109. doi:10.1080/0951192x.2022.2148754
Iqbal, Z., Pozzi, M., Prattichizzo, D., and Salvietti, G. (2021). Detachable robotic grippers for human-robot collaboration. Front. Robot. AI 8, 644532. doi:10.3389/frobt.2021.644532
Islam, S. O. B., and Lughmani, W. A. (2022). A connective framework for social collaborative robotic system. Machines 10 (11), 1086. doi:10.3390/machines10111086
ISO. ISO 10218-1: 2011 - robots and robotic devices — safety requirements for industrial robots —Part 1: robots (2011a).
ISO. ISO 10218-2: 2011 - robots and robotic devices — safety requirements for industrial robots — Part 2: robot systems and integration (2011b).
ISO (2016). ISO/TS 15066: 2016: robots and robotic devices–collaborative robots. Geneva, Switzerland.
ISO. ISO 10218-2:2025 - robotics — safety requirements — Part 2: industrial robot applications and robot cells (2025b).
Iturrate, I., Kramberger, A., and Sloth, C. (2021). Quick setup of force-controlled industrial gluing tasks using learning from demonstration. Front. Robot. AI 8, 767878. doi:10.3389/frobt.2021.767878
Javernik, A., Buchmeister, B., and Ojstersek, R. (2022). Impact of Cobot parameters on the worker productivity: optimization challenge. Adv. Prod. Eng. Manag. 17 (4), 494–504. doi:10.14743/apem2022.4.451
Jezierski, E., Luczak, P., Smyczynski, P., and Zarychta, D. (2019). Human-robot cooperation in sorting of randomly distributed objects. Arch. Control Sci. 29 (4), 603–615. doi:10.24425/acs.2019.131228
Kana, S., Lakshminarayanan, S., Mohan, D. M., and Campolo, D. (2021). Impedance controlled human-robot collaborative tooling for edge chamfering and polishing applications. Robot. Comput. Integr. Manuf. 72, 102199. doi:10.1016/j.rcim.2021.102199
Kanazawa, A., Kinugawa, J., and Kosuge, K. (2019). Adaptive motion planning for a collaborative robot based on prediction uncertainty to enhance human safety and work efficiency. IEEE Trans. Robot. 35 (4), 817–832. doi:10.1109/tro.2019.2911800
Karhu, O., Kansi, P., and Kuorinka, I. (1977). Correcting working postures in industry: a practical method for analysis. Appl. Ergon. 8 (4), 199–201. doi:10.1016/0003-6870(77)90164-8
Khalid, A., Kirisci, P., Khan, Z. H., Ghrairi, Z., Thoben, K. D., and Pannek, J. (2018). Security framework for industrial collaborative robotic cyber-physical systems. Comput. Ind. 97, 132–145. doi:10.1016/j.compind.2018.02.009
Khan, S. G., Herrmann, G., Al Grafi, M., Pipe, T., and Melhuish, C. (2014). Compliance control and human–robot interaction: Part 1—survey. Int. J. Humanoid Robot. 11 (03), 1430001. doi:10.1142/s0219843614300013
Kianoush, S., Savazzi, S., Beschi, M., Sigg, S., and Rampa, V. (2021). A multisensory edge-cloud platform for opportunistic radio sensing in cobot environments. IEEE Internet Things J. 8 (2), 1154–1168. doi:10.1109/jiot.2020.3011809
Kim, E., Kirschner, R., Yamada, Y., and Okamoto, S. (2020). Estimating probability of human hand intrusion for speed and separation monitoring using interference theory. Robot. Comput. Integr. Manuf. 61, 101819. doi:10.1016/j.rcim.2019.101819
Kim, H., and Choi, Y. (2022). Lab scale model experiment of smart hopper system to remove blockages using machine vision and collaborative robot. Appl. Sci. Basel 12 (2), 579. doi:10.3390/app12020579
Kim, H., and Yang, W. (2021). Variable admittance control based on human-robot collaboration observer using frequency analysis for sensitive and safe interaction. Sensors 21 (5), 1899. doi:10.3390/s21051899
Kim, J. (2022). Collision detection and reaction for a collaborative robot with sensorless admittance control. Mechatronics 84, 102811. doi:10.1016/j.mechatronics.2022.102811
Kim, W., Peternel, L., Lorenzini, M., Babic, J., and Ajoudani, A. (2021). A human-robot collaboration framework for improving ergonomics during dexterous operation of power tools. Robot. Comput. Integr. Manuf. 68, 102084. doi:10.1016/j.rcim.2020.102084
Kim, Y. S., Dagalakis, N. G., Marvel, J., and Cheok, G. (2022). Design and testing of wireless motion gauges for two collaborative robot arms. Meas. Sci. Rev. 22 (2), 84–91. doi:10.2478/msr-2022-0011
Kinast, A., Braune, R., Doerner, K. F., Rinderle-Ma, S., and Weckenborg, C. (2022). A hybrid metaheuristic solution approach for the cobot assignment and job shop scheduling problem. J. Ind. Inf. Integr. 28, 100350. doi:10.1016/j.jii.2022.100350
Kolyubin, S., Shiriaev, A., and Jubien, A. (2019). Consistent kinematics and dynamics calibration of lightweight redundant industrial manipulators. Int. J. Adv. Manuf. Technol. 101 (1-4), 243–259. doi:10.1007/s00170-018-2868-y
Kopp, T., Baumgartner, M., and Kinkel, S. (2021). Success factors for introducing industrial human-robot interaction in practice: an empirically driven framework. Int. J. Adv. Manuf. Technol. 112 (3-4), 685–704. doi:10.1007/s00170-020-06398-0
Kopp, T., Baumgartner, M., and Kinkel, S. (2022). How linguistic framing affects factory workers' initial trust in collaborative robots: the interplay between anthropomorphism and technological replacement. Int. J. Hum. Comput. Stud. 158, 102730. doi:10.1016/j.ijhcs.2021.102730
Kot, T., Bobovsky, Z., Brandstötter, M., Krys, V., Virgala, I., and Novak, P. (2021). Finding optimal manipulator arm shapes to avoid collisions in a static environment. Appl. Sci. Basel 11 (1). doi:10.3390/app11010064
Kot, T., Wierbica, R., Oscadal, P., Spurny, T., and Bobovsky, Z. (2022). Using elastic bands for collision avoidance in collaborative robotics. IEEE Access 10, 106972–106987. doi:10.1109/access.2022.3212407
Kraemer, M., Roesmann, C., Hoffmann, F., and Bertram, T. (2020). Model predictive control of a collaborative manipulator considering dynamic obstacles. Optim. Control Appl. Methods 41 (4), 1211–1232. doi:10.1002/oca.2599
Krämer, M., and Bertram, T. (2022). Improving local trajectory optimization by enhanced initialization and global guidance. IEEE Access 10, 29633–29645. doi:10.1109/access.2022.3159233
Krüger, J., Bernhardt, R., Surdilovic, D., and Spur, G. (2006). Intelligent assist systems for flexible assembly. CIRP Ann. Manuf. Technol. 55 (1), 29–32. doi:10.1016/s0007-8506(07)60359-x
Kshirsagar, A., Hoffman, G., and Biess, A. (2021). Evaluating guided policy search for human-robot handovers. IEEE Robot. Autom. Lett. 6 (2), 3933–3940. doi:10.1109/lra.2021.3067299
Kumar, S., Savur, C., and Sahin, F. (2020). Survey of human–robot collaboration in industrial settings: awareness, intelligence, and compliance. IEEE Trans. Syst. Man. Cybern. Syst. 51 (1), 280–297. doi:10.1109/tsmc.2020.3041231
Kunic, A., Naboni, R., Kramberger, A., and Schlette, C. (2021). Design and assembly automation of the robotic reversible timber beam. Autom. Constr. 123, 103531. doi:10.1016/j.autcon.2020.103531
Kwon, W., Jin, Y., and Lee, S. J. (2021). Uncertainty-aware knowledge distillation for collision identification of collaborative robots. Sensors 21 (19), 6674. doi:10.3390/s21196674
Lakshminarayanan, S., Kana, S., Mohan, D. M., Manyar, O. M., Then, D., and Campolo, D. (2021). An adaptive framework for robotic polishing based on impedance control. Int. J. Adv. Manuf. Technol. 112 (1-2), 401–417. doi:10.1007/s00170-020-06270-1
Laliberté, T., and Gosselin, C. (2022). Low-impedance displacement sensors for intuitive physical human-robot interaction: motion guidance, design, and prototyping. IEEE Trans. Robot. 38 (3), 1518–1530. doi:10.1109/tro.2021.3121610
Lambrechts, W., Klaver, J. S., Koudijzer, L., and Semeijn, J. (2021). Human factors influencing the implementation of cobots in high volume distribution centres. Logistics-Basel. 5 (2), 32. doi:10.3390/logistics5020032
Lan, J. Y., Xie, Y. G., Liu, G. J., and Cao, M. X. (2020). A multi-objective trajectory planning method for collaborative robot. Electronics 9 (5), 859. doi:10.3390/electronics9050859
Langlois, K., Rodriguez-Cianca, D., Serrien, B., De Winter, J., Verstraten, T., Rodriguez-Guerrero, C., et al. (2021). Investigating the effects of strapping pressure on human-robot interface dynamics using a soft robotic cuff. IEEE Trans. Med. Robot. Bionics. 3 (1), 146–155. doi:10.1109/tmrb.2020.3042255
Lasota, P. A., and Shah, J. A. (2015). Analyzing the effects of human-aware motion planning on close-proximity human-robot collaboration. Hum. Factors. 57 (1), 21–33. doi:10.1177/0018720814565188
Le, Q. D., and Kang, H. J. (2022). Implementation of sensorless contact force estimation in collaborative robot based on adaptive third-order sliding mode observer. Syst. Sci. Control Eng. 10 (1), 507–516. doi:10.1080/21642583.2022.2063201
Lee, H., Kim, S. D., and Amin, M. (2022). Control framework for collaborative robot using imitation learning-based teleoperation from human digital twin to robot digital twin. Mechatronics 85, 102833. doi:10.1016/j.mechatronics.2022.102833
Lee, H. S., Liau, Y. Y., Kim, S., and Ryu, K. (2020). Model-based human robot collaboration system for small batch assembly with a virtual fence. Int. J. Precis. Eng. Manuf. Green Technol. 7 (3), 609–623. doi:10.1007/s40684-020-00214-6
Lee, S. D., Ahn, K. H., and Song, J. B. (2019). Subspace projection-based collision detection for physical interaction tasks of collaborative robots. Int. J. Precis. Eng. Manuf. 20 (7), 1119–1126. doi:10.1007/s12541-019-00130-z
Lee, S. D., and Song, J. B. (2016). Sensorless collision detection based on friction model for a robot manipulator. Int. J. Precis. Eng. Manuf. 17 (1), 11–17. doi:10.1007/s12541-016-0002-3
Lee, W. B., Park, H. C., Ahn, K. H., and Song, J. B. (2018). Safe robot joint brake based on an elastic latch module. Mechatronics 56, 67–72. doi:10.1016/j.mechatronics.2018.10.007
Lemasurier, G., Bejerano, G., Albanese, V., Parrillo, J., Yanco, H. A., Amerson, N., et al. (2021). Methods for expressing robot intent for human-robot collaboration in shared workspaces. ACM Trans. Hum. Robot. Interact. 10 (4), 1–27. doi:10.1145/3472223
Leonori, M., Gandarias, J. M., and Ajoudani, A. (2022). MOCA-S: a sensitive mobile collaborative robotic assistant exploiting low-cost capacitive tactile cover and whole-body control. IEEE Robot. Autom. Lett. 7 (3), 7920–7927. doi:10.1109/lra.2022.3186053
Li, H. Y., Dharmawan, A. G., Paranawithana, I., Yang, L. J., and Tan, U. X. (2020c). A control scheme for physical human-robot interaction coupled with an environment of unknown stiffness. J. Intell. Robot. Syst. 100 (1), 165–182. doi:10.1007/s10846-020-01176-2
Li, H. Y., Yang, L. J., and Tan, U. X. (2020d). A control scheme for smooth transition in physical human-robot-environment between two modes: augmentation and autonomous. IEEE Robot. Autom. Lett. 5 (4), 5803–5810. doi:10.1109/lra.2020.3010450
Li, R. Y., Pham, D. T., Huang, J., Tan, Y. G., Qu, M., Wang, Y. J., et al. (2020a). Unfastening of hexagonal headed screws by a collaborative robot. IEEE Trans. Autom. Sci. Eng. 17 (3), 1455–1468. doi:10.1109/TASE.2019.2958712
Li, T. J., Zhang, Y., and Zhou, J. X. (2019). Trajectory planning of high precision collaborative robots. CMES-Comput Model Eng. Sci. 118 (3), 583–598. doi:10.31614/cmes.2018.04891
Li, T. J., Zheng, K. W., Liu, J. Y., Jia, X. H., and Feng, J. B. (2021c). Research on operation intention based on flexible tactile sensing handle. IEEE Access 9, 12362–12373. doi:10.1109/access.2021.3050991
Li, W., Han, Y., Wu, J. H., and Xiong, Z. H. (2020b). Collision detection of robots based on a force/torque sensor at the bedplate. IEEE-ASME Trans. Mechatronics. 25 (5), 2565–2573. doi:10.1109/tmech.2020.2995904
Li, W., Hu, Y., Zhou, Y., and Pham, D. T. (2023). Safe human–robot collaboration for industrial settings: a survey. J. Intell. Manuf. 35, 2235–2261. doi:10.1007/s10845-023-02159-4
Li, W.-S., Yan, Q., Chen, W.-T., Li, G.-Y., and Cong, L. (2021a). Global research trends in robotic applications in spinal medicine: a systematic bibliometric analysis. World Neurosurg. 155, e778–e785. doi:10.1016/j.wneu.2021.08.139
Li, Z. X., Janardhanan, M. N., and Tang, Q. H. (2021b). Multi-objective migrating bird optimization algorithm for cost-oriented assembly line balancing problem with collaborative robots. Neural Comput. Appl. 33 (14), 8575–8596. doi:10.1007/s00521-020-05610-2
Liang, C. D., Wang, L. M., Yao, X. Y., Liu, Z. W., and Ge, M. F. (2019). Multi-target tracking of networked heterogeneous collaborative robots in task space. Nonlinear Dyn. 97 (2), 1159–1173. doi:10.1007/s11071-019-05038-x
Liau, Y. Y., and Ryu, K. (2022a). Genetic algorithm-based task allocation in multiple modes of human-robot collaboration systems with two cobots. Int. J. Adv. Manuf. Technol. 119 (11-12), 7291–7309. doi:10.1007/s00170-022-08670-x
Liau, Y. Y., and Ryu, K. (2022b). Application framework of collaborative robot to mold assembly processes. Ind. Eng. Manag. Syst. 21 (4), 658–669. doi:10.7232/iems.2022.21.4.658
Lima, F., de Carvalho, C. N., Acardi, M. B. S., dos Santos, E. G., de Miranda, G. B., Maia, R. F., et al. (2019). Digital manufacturing tools in the simulation of collaborative robots: towards industry 4.0. Braz J. Oper. Prod. Manag. 16 (2), 261–280. doi:10.14488/bjopm.2019.v16.n2.a8
Lins, R. G., Givigi, S. N., and Kurka, P. R. G. (2015). Vision-based measurement for localization of objects in 3-D for robotic applications. IEEE Trans. Instrum. Meas. 64 (11), 2950–2958. doi:10.1109/tim.2015.2440556
Lippi, M., and Marino, A. (2021). Human multi-robot safe interaction: a trajectory scaling approach based on safety assessment. IEEE Trans. Control Syst. Technol. 29 (4), 1565–1580. doi:10.1109/tcst.2020.3009031
Liu, B., Fu, W. P., Wang, W., Gao, Z. Q., Li, R., Peng, L. X., et al. (2022b). Research on cobot action decision-making method based on intuitionistic fuzzy set and game theory. IEEE Access 10, 103349–103363. doi:10.1109/access.2022.3205305
Liu, B., Fu, W. P., Wang, W., Li, R., Gao, Z. Q., Peng, L. X., et al. (2022a). Cobot motion planning algorithm for ensuring human safety based on behavioral dynamics. Sensors 22 (12), 4376. doi:10.3390/s22124376
Liu, D., and Cao, J. W. (2022). Determinants of collaborative robots innovation adoption in small and medium-sized enterprises: an empirical study in China. Appl. Sci. Basel 12 (19), 10085. doi:10.3390/app121910085
Liu, D., and Son, S. (2024). Trends and knowledge structure in collaborative robot research in the knowledge economy era: a bibliometric analysis. J Knowl Econ.
Liu, H. Y., and Wang, L. H. (2020). Remote human-robot collaboration: a cyber-physical system application for hazard manufacturing environment. J. Manuf. Syst. 54, 24–34. doi:10.1016/j.jmsy.2019.11.001
Liu, L., Guo, F., Zou, Z. S., and Duffy, V. G. (2024a). Application, development and future opportunities of collaborative robots (cobots) in manufacturing: a literature review. Int. J. Hum. Comput. Interact. 40 (4), 915–932. doi:10.1080/10447318.2022.2041907
Liu, L., Schoen, A. J., Henrichs, C., Li, J. S., Mutlu, B., Radwin, R. G., et al. (2024b). Human robot collaboration for enhancing work activities. Hum. Factors 66 (1), 158–179. doi:10.1177/00187208221077722
Liu, L. Y., Liu, Q. Y., Song, Y., Pang, B., Yuan, X. F., and Xu, Q. Y. (2021b). A collaborative control method of dual-arm robots based on deep reinforcement learning. Appl. Sci. Basel 11 (4), 1816. doi:10.3390/app11041816
Liu, Y. W., Cui, S. P., and Sun, Y. J. (2021a). Mechanical design and analysis of a novel variable stiffness actuator with symmetrical pivot adjustment. Front. Mech. Eng. 16 (4), 711–725. doi:10.1007/s11465-021-0647-1
Long, J. Y., Liang, Q. K., Sun, W., Wang, Y. N., and Zhang, D. (2021). Ultrathin three-Axis FBG wrist force sensor for collaborative robots. IEEE Trans. Instrum. Meas. 70, 1–15. doi:10.1109/tim.2021.3086898
Long, P., Chevallereau, C., Chablat, D., and Girin, A. (2018). An industrial security system for human-robot coexistence. Int. J. Robot. Res. Appl. 45 (2), 220–226. doi:10.1108/ir-09-2017-0165
Long, S. K., Dang, X. J., Sun, S. L., Wang, Y. J., and Gui, M. Z. (2022). A novel sliding mode momentum observer for collaborative robot collision detection. Machines. 10 (9), 818. doi:10.3390/machines10090818
Long, X., Chen, J., Li, J., and Luo, Z. (2024). The current status and global trends of clinical trials related to robotic surgery: a bibliometric and visualized study. J. Robot. Surg. 18 (1), 193. doi:10.1007/s11701-024-01940-8
Lu, L., Xie, Z., Wang, H., Li, L., and Xu, X. (2022a). Mental stress and safety awareness during human-robot collaboration-Review. Appl. Ergon. 105, 103832. doi:10.1016/j.apergo.2022.103832
Lu, S. N., Xu, Z. D., and Wang, B. R. (2022b). Human-robot collision detection based on the improved camshift algorithm and bounding box. Int. J. Control Autom. Syst. 20 (10), 3347–3360. doi:10.1007/s12555-021-0280-0
Lucci, N., Lacevic, B., Zanchettin, A. M., and Rocco, P. (2020). Combining speed and separation monitoring with power and force limiting for safe collaborative robotics applications. IEEE Robot. Autom. Lett. 5 (4), 6121–6128. doi:10.1109/lra.2020.3010211
Lv, Z. H., and Qiao, L. (2020). Deep belief network and linear perceptron based cognitive computing for collaborative robots. Appl. Soft Comput. 92, 106300. doi:10.1016/j.asoc.2020.106300
Ma, L. J., Dong, L. L., Han, Y., Yan, J., and Zhou, J. M. (2020). A method of sensorless collision detection based on motor current for robot manipulator. Int. J. Appl. Electromagn. Mech. 64 (1-4), 237–244. doi:10.3233/jae-209327
Madsen, E., Rosenlund, O. S., Brandt, D., and Zhang, X. P. (2020). Comprehensive modeling and identification of nonlinear joint dynamics for collaborative industrial robot manipulators. Control Eng. Pract. 101, 104462. doi:10.1016/j.conengprac.2020.104462
Magyar, B., Tsiogkas, N., Brito, B., Patel, M., Lane, D., and Wang, S. (2019). Guided stochastic optimization for motion planning. Front. Robot. AI 6, 105. doi:10.3389/frobt.2019.00105
Maithani, H., Ramon, J. A. C., Lequievre, L., Mezouar, Y., and Alric, M. (2021). Exoscarne: assistive strategies for an industrial meat cutting system based on physical human-robot interaction. Appl. Sci. Basel 11 (9), 3907. doi:10.3390/app11093907
Malik, A. A., and Bilberg, A. (2019a). Developing a reference model for human-robot interaction. Int. J. Interact. Des. Manuf. 13 (4), 1541–1547. doi:10.1007/s12008-019-00591-6
Malik, A. A., and Bilberg, A. (2019b). Complexity-based task allocation in human-robot collaborative assembly. Int. J. Robot. Res. Appl. 46 (4), 471–480. doi:10.1108/ir-11-2018-0231
Malik, A. A., and Brem, A. (2021). Digital twins for collaborative robots: a case study in human-robot interaction. Robot. Comput. Integr. Manuf. 68, 102092. doi:10.1016/j.rcim.2020.102092
Malik, A. A., Masood, T., and Bilberg, A. (2020). Virtual reality in manufacturing: immersive and collaborative artificial-reality in design of human-robot workspace. Int. J. Comput. Integr. Manuf. 33 (1), 22–37. doi:10.1080/0951192x.2019.1690685
Malik, A. A., Masood, T., and Kousar, R. (2021). Reconfiguring and ramping-up ventilator production in the face of COVID-19: can robots help? J. Manuf. Syst. 60, 864–875. doi:10.1016/j.jmsy.2020.09.008
Mangat, A. S., Mangler, J., and Rinderle-Ma, S. (2021). Interactive Process Automation based on lightweight object detection in manufacturing processes. Comput. Ind. 130, 103482. doi:10.1016/j.compind.2021.103482
Marturi, N., Kopicki, M., Rastegarpanah, A., Rajasekaran, V., Adjigble, M., Stolkin, R., et al. (2019). Dynamic grasp and trajectory planning for moving objects. Auton. Robot. 43 (5), 1241–1256. doi:10.1007/s10514-018-9799-1
Marvel, J. A., Falco, J., and Marstio, I. (2015). Characterizing task-based human-robot collaboration safety in manufacturing. IEEE Trans. Syst. Man. Cybern. Syst. 45 (2), 260–275. doi:10.1109/tsmc.2014.2337275
Marvel, J. A., and Norcross, R. (2017). Implementing speed and separation monitoring in collaborative robot workcells. Robot. Comput. Integr. Manuf. 44, 144–155. doi:10.1016/j.rcim.2016.08.001
Mateus, J. C., Claeys, D., Limère, V., Cottyn, J., and Aghezzaf, E. (2019). A structured methodology for the design of a human-robot collaborative assembly workplace. Int. J. Adv. Manuf. Technol. 102 (5-8), 2663–2681. doi:10.1007/s00170-019-03356-3
Mateus, J. C., Claeys, D., Limère, V., Cottyn, J., and Aghezzaf, E. (2020). Base part centered assembly task precedence generation. Int. J. Adv. Manuf. Technol. 107 (1-2), 607–616. doi:10.1007/s00170-019-04864-y
Matheson, E., Minto, R., Zampieri, E. G. G., Faccio, M., and Rosati, G. (2019). Human-robot collaboration in manufacturing applications: a review. Robot 8 (4), 100. doi:10.3390/robotics8040100
Mathew, R., McGee, R., Roche, K., Warreth, S., and Papakostas, N. (2022). Introducing mobile collaborative robots into bioprocessing environments: personalised drug manufacturing and environmental monitoring. Appl. Sci. Basel 12 (21), 10895. doi:10.3390/app122110895
Maurice, P., Malaisé, A., Amiot, C., Paris, N., Richard, G., Rochel, O., et al. (2019). Human movement and ergonomics: an industry-oriented dataset for collaborative robotics. Int. J. Robot. Res. 38 (14), 1529–1537. doi:10.1177/0278364919882089
Maurice, P., Padois, V., Measson, Y., and Bidaud, P. (2017). Human-oriented design of collaborative robots. Int. J. Ind. Ergon. 57, 88–102. doi:10.1016/j.ergon.2016.11.011
Maurtua, I., Fernández, I., Tellaeche, A., Kildal, J., Susperregi, L., Ibarguren, A., et al. (2017b). Natural multimodal communication for human-robot collaboration. Int. J. Adv. Robot. Syst. 14 (4), 172988141771604. doi:10.1177/1729881417716043
Maurtua, I., Ibarguren, A., Kildal, J., Susperregi, L., and Sierra, B. (2017a). Human-robot collaboration in industrial applications: safety, interaction and trust. Int. J. Adv. Robot. Syst. 14 (4), 172988141771601. doi:10.1177/1729881417716010
Mayer, A., Müller, D., Raisch, A., and Sawodny, O. (2020). Model-predictive reference trajectory planning for redundant pneumatic collaborative robots. AT-Automatisierungstech 68 (5), 360–374. doi:10.1515/auto-2019-0127
Mayyas, M., Vadlamudi, S. P., and Syed, M. A. (2020). Fenceless obstacle avoidance method for efficient and safe human-robot collaboration in a shared work space. Int. J. Adv. Robot. Syst. 17 (5). doi:10.1177/1729881420959018
Mazhar, O., Navarro, B., Ramdani, S., Passama, R., and Cherubini, A. (2019). A real-time human-robot interaction framework with robust background invariant hand gesture detection. Robot. Comput. Integr. Manuf. 60, 34–48. doi:10.1016/j.rcim.2019.05.008
McAtamney, L., and Corlett, E. N. (1993). RULA: a survey method for the investigation of work-related upper limb disorders. Appl. Ergon. 24 (2), 91–99. doi:10.1016/0003-6870(93)90080-s
Meissner, A., Trübswetter, A., Conti-Kufner, A. S., and Schmidtler, J. (2020). Friend or foe? Understanding assembly workers' acceptance of human-robot collaboration. ACM Trans. Hum. Robot. Interact. 10 (1), 1–30. doi:10.1145/3399433
Melchiorre, M., Scimmi, L. S., Mauro, S., and Pastorelli, S. P. (2021). Vision-based control architecture for human-robot hand-over applications. Asian J. Control 23 (1), 105–117. doi:10.1002/asjc.2480
Mendes, N. (2022). Surface electromyography signal recognition based on deep learning for human-robot interaction and collaboration. J. Intell. Robot. Syst. 105 (2), 42. doi:10.1007/s10846-022-01666-5
Mendoza-Trejo, O., and Cruz-Villar, C. A. (2016). Modelling and experimental validation of a planar 2-dof cobot as a differential-algebraic equation system. Appl. Math. Model 40 (21-22), 9327–9341. doi:10.1016/j.apm.2016.06.007
Mendoza-Trejo, O., Padilla-Garcia, E. A., Cruz-Villar, C. A., and Rodríguez-Angeles, A. (2019). Free kinematic singularity controller for a planetary gear based cobot. Int. J. Soc. Robot. 11 (2), 211–218. doi:10.1007/s12369-018-0486-3
Merchán-Cruz, E. A., and Morris, A. S. (2006). Fuzzy-GA-based trajectory planner for robot manipulators sharing a common workspace. IEEE Trans. Robot. 22 (4), 613–624. doi:10.1109/tro.2006.878789
Merckaert, K., De Beir, A., Adriaens, N., El Makrini, I., Van Ham, R., and Vanderborght, B. (2018). Independent load carrying and measurement manipulator robot arm for improved payload to mass ratio. Robot. Comput. Integr. Manuf. 53, 135–140. doi:10.1016/j.rcim.2018.04.001
Messeri, C., Bicchi, A., Zanchettin, A. M., and Rocco, P. (2022). A dynamic task allocation strategy to mitigate the human physical fatigue in collaborative robotics. IEEE Robot. Autom. Lett. 7 (2), 2178–2185. doi:10.1109/lra.2022.3143520
Min, J. K., Ahn, K. H., Park, H. C., and Song, J. B. (2019). A novel reactive-type joint torque sensor with high torsional stiffness for robot applications. Mechatronics 63, 102265. doi:10.1016/j.mechatronics.2019.102265
Min, J. K., and Song, J. B. (2020). Sensor block type joint torque sensor insensitive to crosstalk error. IEEE Sens. J. 20 (7), 3469–3475. doi:10.1109/jsen.2019.2959842
Mitrea, D., and Tamas, L. (2018). Manufacturing execution system specific data analysis-use case with a cobot. IEEE Access 6, 50245–50259. doi:10.1109/access.2018.2869346
Miyake, Y., and Kondo, Y. (2022). A study on new machining method applied to a collaborative robot for drilling. Robot. Comput. Integr. Manuf. 78, 102409. doi:10.1016/j.rcim.2022.102409
Montini, E., Daniele, F., Agbomemewa, L., Confalonieri, M., Cutrona, V., Bettoni, A., et al. (2024). Collaborative robotics: a survey from literature and practitioners perspectives. J. Intell. Robot. Syst. 110 (3), 117. doi:10.1007/s10846-024-02141-z
Moore, C. A., Peshkin, M. A., and Colgate, J. E. (2003). Cobot implementation of virtual paths and 3-D virtual surfaces. IEEE Trans. Robot. Autom. 19 (2), 347–351. doi:10.1109/tra.2003.808866
Mudhivarthi, B. R., and Thakur, P. (2022). Integration of artificial intelligence in robotic vehicles: a bibliometric analysis;13(1):110–120. doi:10.1515/pjbr-2022-0102
Mukherjee, D., Gupta, K., Chang, L. H., and Najjaran, H. (2022). A survey of robot learning strategies for human-robot collaboration in industrial settings. Robot. Comput. Integr. Manuf. 73, 102231. doi:10.1016/j.rcim.2021.102231
Müller, D., Veil, C., Seidel, M., and Sawodny, O. (2020). One-Shot kinesthetic programming by demonstration for soft collaborative robots. Mechatronics 70, 102418. doi:10.1016/j.mechatronics.2020.102418
Mura, M. D., and Dini, G. (2019). Designing assembly lines with humans and collaborative robots: a genetic approach. CIRP Ann. Manuf. Technol. 68 (1), 1–4. doi:10.1016/j.cirp.2019.04.006
Mura, M. D., and Dini, G. (2022). Job rotation and human-robot collaboration for enhancing ergonomics in assembly lines by a genetic algorithm. Int. J. Adv. Manuf. Technol. 118 (9-10), 2901–2914. doi:10.1007/s00170-021-08068-1
Murali, P. K., Darvish, K., and Mastrogiovanni, F. (2020). Deployment and evaluation of a flexible human-robot collaboration model based on AND/OR graphs in a manufacturing environment. Intell. Serv. Robot. 13 (4), 439–457. doi:10.1007/s11370-020-00332-9
Nadeau, N. A., Bonev, I. A., and Joubair, A. (2019). Impedance control self-calibration of a collaborative robot using kinematic coupling. Robot 8 (2), 33. doi:10.3390/robotics8020033
N. Najmaei, S. Lele, M. Kermani, and R. Sobot (2010). “Human factors for robot safety assessment,” 2010 IEEE/ASME international conference on advanced intelligent mechatronics (IEEE).
Nascimento, H., Mujica, M., and Benoussaad, M. (2021). Collision avoidance interaction between human and a hidden robot based on kinect and robot data fusion. IEEE Robot. Autom. Lett. 6 (1), 88–94. doi:10.1109/lra.2020.3032104
Navas-Reascos, G. E., Romero, D., Rodriguez, C. A., Guedea, F., and Stahre, J. (2022). Wire harness assembly process supported by a collaborative robot: a case study focus on ergonomics. Robot 11 (6), 131. doi:10.3390/robotics11060131
Neto, P., Simao, M., Mendes, N., and Safeea, M. (2019). Gesture-based human-robot interaction for human assistance in manufacturing. Int. J. Adv. Manuf. Technol. 101 (1-4), 119–135. doi:10.1007/s00170-018-2788-x
Nguyen, T. D., Kim, T., Noh, J., Phung, H., Kang, G., and Choi, H. R. (2021). Skin-Type proximity sensor by using the change of electromagnetic field. IEEE Trans. Ind. Electron 68 (3), 2379–2388. doi:10.1109/tie.2020.2975503
Nguyen, V., and Case, J. (2022). Compensation of electrical current drift in human-robot collision. Int. J. Adv. Manuf. Technol. 123 (7-8), 2783–2791. doi:10.1007/s00170-022-10369-y
Nguyen, V., and Marvel, J. A. (2022). Modeling of industrial robot kinematics using a hybrid analytical and statistical approach. J. Mech. Robot. Trans. ASME. 14 (5). doi:10.1115/1.4053734
Nourmohammadi, A., Fathi, M., and Ng, A. H. C. (2022). Balancing and scheduling assembly lines with human-robot collaboration tasks. Comput. Oper. Res. 140, 105674. doi:10.1016/j.cor.2021.105674
Ochoa, H., and Cortesao, R. (2022). Impedance control architecture for robotic-assisted mold polishing based on human demonstration. IEEE Trans. Ind. Electron 69 (4), 3822–3830. doi:10.1109/tie.2021.3073310
Ogenyi, U. E., Liu, J. G., Yang, C. G., Ju, Z. J., and Liu, H. H. (2021). Physical human-robot collaboration: robotic systems, learning methods, collaborative strategies, sensors, and actuators. IEEE Trans. Cybern. 51 (4), 1888–1901. doi:10.1109/tcyb.2019.2947532
Ojstersek, R., Javernik, A., and Buchmeister, B. (2022). Importance of sustainable collaborative workplaces - simulation modelling approach. Int. J. Simul. Model 21 (4), 627–638. doi:10.2507/ijsimm21-4-623
Oliff, H., Liu, Y., Kumar, M., and Williams, M. (2020). Improving human-robot interaction utilizing learning and intelligence: a human factors-based approach. IEEE Trans. Autom. Sci. Eng. 17 (3), 1–14. doi:10.1109/tase.2020.2967093
Olivares-Alarcos, A., Foix, S., and Alenyà, G. (2019). On inferring intentions in shared tasks for industrial collaborative robots. Electronics 8 (11), 1306. doi:10.3390/electronics8111306
Olivares-Alarcos, A., Foix, S., Borgo, S., and Alenyà, G. (2022). OCRA - an ontology for collaborative robotics and adaptation. Comput. Ind. 138, 103627. doi:10.1016/j.compind.2022.103627
O'Neill, J., Lu, J., Dockter, R., and Kowalewski, T. (2018). Stretchable, flexible, scalable smart skin sensors for robotic position and force estimation. Sensors 18 (4), 953. doi:10.3390/s18040953
Onnasch, L., Kostadinova, E., and Schweidler, P. (2022). Humans can't resist robot eyes - reflexive cueing with pseudo-social stimuli. Front. Robot. AI 9, 848295. doi:10.3389/frobt.2022.848295
OSHA. OSHA technical manual - industrial robot systems and industrial robot system safety (section IV of chapter 4). Occupational safety and health administration (OSHA) (2017).
O'Shea, N., Kennedy, D., Tobin, J. T., and Fenelon, M. A. (2021). Reconstituting infant formula powder using a collaborative robot ?CoBoT? to mimic human biomechanical movements. Innov. Food Sci. Emerg. Technol. 67, 102562. doi:10.1016/j.ifset.2020.102562
Ostanin, M., Yagfarov, R., Devitt, D., Akhmetzyanov, A., and Klimchik, A. (2021). Multi robots interactive control using mixed reality. Int. J. Prod. Res. 59 (23), 7126–7138. doi:10.1080/00207543.2020.1834640
Ostyn, F., Vanderborght, B., and Crevecoeur, G. (2022). Overload clutch with integrated torque sensing and decoupling detection for collision tolerant hybrid high-speed industrial cobots. IEEE Robot. Autom. Lett. 7 (4), 12601–12607. doi:10.1109/lra.2022.3220527
Pagani, R., Nuzzi, C., Ghidelli, M., Borboni, A., Lancini, M., and Legnani, G. (2021). Cobot user frame calibration: evaluation and comparison between positioning repeatability performances achieved by traditional and vision-based methods. Robot 10 (1), 45. doi:10.3390/robotics10010045
Paliga, M. (2022). Human–cobot interaction fluency and cobot operators’ job performance. The mediating role of work engagement: a survey. Robot. Auton. Syst. 155, 104191. doi:10.1016/j.robot.2022.104191
Palleschi, A., Hamad, M., Abdolshah, S., Garabini, M., Haddadin, S., and Pallottino, L. (2021). Fast and safe trajectory planning: solving the cobot performance/safety trade-off in human-robot shared environments. IEEE Robot. Autom. Lett. 6 (3), 5445–5452. doi:10.1109/lra.2021.3076968
Palmieri, G., and Scoccia, C. (2021). Motion planning and control of redundant manipulators for dynamical obstacle avoidance. Machines 9 (6), 121. doi:10.3390/machines9060121
Palomba, I., Gualtieri, L., Rojas, R., Rauch, E., Vidoni, R., and Ghedin, A. (2021). Mechatronic Re-design of a manual assembly workstation into a collaborative one for wire harness assemblies. Robot 10 (1), 43. doi:10.3390/robotics10010043
Pang, G. Y., Deng, J., Wang, F. J. H., Zhang, J. H., Pang, Z. B., and Yang, G. (2018). Development of flexible robot skin for safe and natural human-robot collaboration. Micromachines 9 (11), 576. doi:10.3390/mi9110576
Pang, G. Y., Yang, G., Heng, W. Z., Ye, Z. Q., Huang, X. Y., Yang, H. Y., et al. (2021). CoboSkin: soft robot skin with variable stiffness for safer human-robot collaboration. IEEE Trans. Ind. Electron 68 (4), 3303–3314. doi:10.1109/tie.2020.2978728
Pantano, M., Pavlovskyi, Y., Schulenburg, E., Traganos, K., Ahmadi, S., Regulin, D., et al. (2022). Novel approach using risk analysis component to continuously update collaborative robotics applications in the smart, connected factory model. Appl. Sci. Basel 12 (11), 5639. doi:10.3390/app12115639
Papanagiotou, D., Senteri, G., and Manitsaris, S. (2021). Egocentric gesture recognition using 3D convolutional neural networks for the spatiotemporal adaptation of collaborative robots. Front. Neurorobot 15, 703545. doi:10.3389/fnbot.2021.703545
Papetti, A., Ciccarelli, M., Scoccia, C., Palmieri, G., and Germani, M. (2023). A human-oriented design process for collaborative robotics. Int. J. Comput. Integr. Manuf. 36 (12), 1760–1782. doi:10.1080/0951192x.2022.2128222
Park, K. M., Kim, J., Park, J., and Park, F. C. (2021a). Learning-based real-time detection of robot collisions without joint torque sensors. IEEE Robot. Autom. Lett. 6 (1), 103–110. doi:10.1109/lra.2020.3033269
Park, K. M., Park, Y., Yoon, S., and Park, F. C. (2022). Collision detection for robot manipulators using unsupervised anomaly detection algorithms. IEEE-ASME Trans. Mechatronics. 27 (5), 2841–2851. doi:10.1109/tmech.2021.3119057
Park, M. Y., Choi, J. S., Kim, K. S., Rhim, S., Park, H. J., and Shin, M. K. (2019). Identification of a closed cutaneous injury after mechanical trauma caused by collision. Skin. Res. Technol. 25 (4), 440–446. doi:10.1111/srt.12670
Park, Y. S., Yoo, D. Y., and Lee, J. W. (2021b). Programmable motion-fault detection for a collaborative robot. IEEE Access 9, 133123–133142. doi:10.1109/access.2021.3114505
Patil, S., Vasu, V., and Srinadh, K. V. S. (2023). Advances and perspectives in collaborative robotics: a review of key technologies and emerging trends. Discov. Mech. Eng. 2 (1), 13. doi:10.1007/s44245-023-00021-8
Pauliková, A., UbirovaBabel'ová, Z. G. M., and Ubárová, M. (2021). Analysis of the impact of human-cobot collaborative manufacturing implementation on the occupational health and safety and the quality requirements. Int. J. Environ. Res. Public Health 18 (4), 1927. doi:10.3390/ijerph18041927
Pearce, M., Mutlu, B., Shah, J., and Radwin, R. (2018). Optimizing makespan and ergonomics in integrating collaborative robots into manufacturing processes. IEEE Trans. Autom. Sci. Eng. 15 (4), 1772–1784. doi:10.1109/tase.2018.2789820
Pedersen, M. R., Nalpantidis, L., Andersen, R. S., Schou, C., Bøgh, S., Krüger, V., et al. (2016). Robot skills for manufacturing: from concept to industrial deployment. Robot. Comput. Integr. Manuf. 37, 282–291. doi:10.1016/j.rcim.2015.04.002
Pérez, L., Rodríguez-Jiménez, S., Rodríguez, N., Usamentiaga, R., and García, D. F. (2020). Digital twin and virtual reality based methodology for multi-robot manufacturing cell commissioning. Appl. Sci. Basel 10 (10), 3633. doi:10.3390/app10103633
Pérez-Ubeda, R., Zotovic-Stanisic, R., and Gutiérrez, S. C. (2020). Force control improvement in collaborative robots through theory analysis and experimental endorsement. Appl. Sci. Basel 10 (12), 4329. doi:10.3390/app10124329
Perez-Vidal, C., Gracia, L., de Paco, J. M., Wirkus, M., Azorin, J. M., and de Gea, J. (2018). Automation of product packaging for industrial applications. Int. J. Comput. Integr. Manuf. 31 (2), 129–137. doi:10.1080/0951192x.2017.1369165
Perez-Vidal, C., Gracia, L., Sanchez-Caballero, S., Solanes, J. E., Saccon, A., and Tornero, J. (2019). Design of a polishing tool for collaborative robotics using minimum viable product approach. Int. J. Comput. Integr. Manuf. 32 (9), 848–857. doi:10.1080/0951192x.2019.1637026
Peshkin, M., and Colgate, J. E. (1999). Cobots. Ind. Robot. 26 (5), 335–341. doi:10.1108/01439919910283722
Peshkin, M. A., Colgate, J. E., Wannasuphoprasit, W., Moore, C. A., Gillespie, R. B., and Akella, P. (2001). Cobot architecture. IEEE Trans. Robot. Autom. 17 (4), 377–390. doi:10.1109/70.954751
Petzoldt, C., Niermann, D., Maack, E., Sontopski, M., Vur, B., and Freitag, M. (2022). Implementation and evaluation of dynamic task allocation for human-robot collaboration in assembly. Appl. Sci. Basel 12 (24), 12645. doi:10.3390/app122412645
Pinto, A. R., Kildal, J., and Lazkano, E. (2020). Multimodal mixed reality impact on a hand guiding task with a holographic cobot. Multimodal Technol. Interact. 4 (4), 78. doi:10.3390/mti4040078
Pizon, J., Cioch, M., Kanski, L., and García, E. S. (2022). Cobots implementation in the era of industry 5.0 using modern business and management solutions. Adv. Sci. Technol. Res. J. 16 (6), 166–178. doi:10.12913/22998624/156222
Pollak, A., Paliga, M., Pulopulos, M. M., Kozusznik, B., and Kozusznik, M. W. (2020). Stress in manual and autonomous modes of collaboration with a cobot. Comput. Hum. Behav. 112, 106469. doi:10.1016/j.chb.2020.106469
Pollák, M., and Kocisko, M. (2021). Design and implementation of 3D printing using a universal printing system on the robot arm UR5. Tem. J. Technol. Educ. Manag. Inf. 10 (4), 1895–1899. doi:10.18421/tem104-53
Pollák, M., Kocisko, M., Paulisin, D., and Baron, P. (2020). Measurement of unidirectional pose accuracy and repeatability of the collaborative robot UR5. Adv. Mech. Eng. 12 (12). doi:10.1177/1687814020972893
Polverini, M. P., Zanchettin, A. M., and Rocco, P. (2017). A computationally efficient safety assessment for collaborative robotics applications. Robot. Comput. Integr. Manuf. 46, 25–37. doi:10.1016/j.rcim.2016.11.002
Polverini, M. P., Zanchettin, A. M., and Rocco, P. (2019). A constraint-based programming approach for robotic assembly skills implementation. Robot. Comput. Integr. Manuf. 59, 69–81. doi:10.1016/j.rcim.2019.03.005
Pop, E., Campean, E., Braga, I. C., and Ispas, D. (2022). New product development of a robotic soldering cell using lean manufacturing methodology. Sustainability 14 (21), 14057. doi:10.3390/su142114057
Popov, D., Klimchik, A., and Pashkevich, A. (2021). Real-time estimation of multiple potential contact locations and forces. IEEE Robot. Autom. Lett. 6 (4), 7025–7032. doi:10.1109/lra.2021.3095902
Popov, D., Klimchik, A., and Pashkevich, A. (2022). Robustness of interaction parameters identification technique for collaborative robots. IEEE Robot. Autom. Lett. 7 (4), 8582–8589. doi:10.1109/lra.2022.3188886
Prati, E., Peruzzini, M., Pellicciari, M., and Raffaeli, R. (2021). How to include user eXperience in the design of human-robot interaction. Robot. Comput. Integr. Manuf. 68, 102072. doi:10.1016/j.rcim.2020.102072
Prati, E., Villani, V., Grandi, F., Peruzzini, M., and Sabattini, L. (2022). Use of interaction design methodologies for human-robot collaboration in industrial scenarios. IEEE Trans. Autom. Sci. Eng. 19 (4), 3126–3138. doi:10.1109/tase.2021.3107583
Prioli, J. P. J., Liu, S. Y., Shen, Y. F., Huynh, V. T., Rickli, J. L., Yang, H. J., et al. (2022). Empirical study for human engagement in collaborative robot programming. J. Integr. Des. Process Sci. 26 (2), 159–181. doi:10.3233/JID-221012
Proia, S., Carli, R., Cavone, G., and Dotoli, M. (2022). Control techniques for safe, ergonomic, and efficient human-robot collaboration in the digital industry: a survey. IEEE Trans. Autom. Sci. Eng. 19 (3), 1798–1819. doi:10.1109/tase.2021.3131011
Pupa, A., Van Dijk, W., Brekelmans, C., and Secchi, C. (2022). A resilient and effective task scheduling approach for industrial human-robot collaboration. Sensors 22 (13), 4901. doi:10.3390/s22134901
Pupa, A., Van Dijk, W., and Secchi, C. (2021). A human-centered dynamic scheduling architecture for collaborative application. IEEE Robot. Autom. Lett. 6 (3), 4736–4743. doi:10.1109/lra.2021.3068888
Qi, K. K., Song, Z. B., and Dai, J. S. (2022). Safe physical human-robot interaction: a quasi whole-body sensing method based on novel laser-ranging sensor ring pairs. Robot. Comput. Integr. Manuf. 75, 102280. doi:10.1016/j.rcim.2021.102280
Quintana, J. J., Ferrer, M. A., Diaz, M., Feo, J. J., Wolniakowski, A., and Miatliuk, K. (2022). Uniform vs. Lognormal kinematics in robots: perceptual preferences for robotic movements. Appl. Sci. Basel 12 (23), 12045. doi:10.3390/app122312045
Raiola, G., Cardenas, C. A., Tadele, T. S., de Vries, T., and Stramigioli, S. (2018). Development of a safety-and energy-aware impedance controller for collaborative robots. IEEE Robot. Autom. Lett. 3 (2), 1237–1244. doi:10.1109/lra.2018.2795639
Rato, D., Oliveira, M., Santos, V., Gomes, M., and Sappa, A. (2022). A sensor-to-pattern calibration framework for multi-modal industrial collaborative cells. J. Manuf. Syst. 64, 497–507. doi:10.1016/j.jmsy.2022.07.006
Raviola, A., Antonacci, M., Marino, F., Jacazio, G., Sorli, M., and Wende, G. (2021a). Collaborative robotics: enhance maintenance procedures on primary flight control servo-actuators. Appl. Sci. Basel 11 (11), 4929. doi:10.3390/app11114929
Raviola, A., Guida, R., De Martin, A., Pastorelli, S., Mauro, S., and Sorli, M. (2021b). Effects of temperature and mounting configuration on the dynamic parameters identification of industrial robots. Robot 10 (3), 83. doi:10.3390/robotics10030083
Raziei, Z., and Moghaddam, M. (2021). Adaptable automation with modular deep reinforcement learning and policy transfer. Eng. Appl. Artif. Intell. 103, 104296. doi:10.1016/j.engappai.2021.104296
Realyvásquez-Vargas, A., Arredondo-Soto, K. C., García-Alcaraz, J. L., Márquez-Lobato, B. Y., and Cruz-García, J. (2019). Introduction and configuration of a collaborative robot in an assembly task as a means to decrease occupational risks and increase efficiency in a manufacturing company. Robot. Comput. Integr. Manuf. 57, 315–328. doi:10.1016/j.rcim.2018.12.015
Rega, A., Di Marino, C., Pasquariello, A., Vitolo, F., Patalano, S., Zanella, A., et al. (2021b). Collaborative workplace design: a knowledge-based approach to promote human-robot collaboration and multi-objective layout optimization. Appl. Sci. Basel 11 (24), 12147. doi:10.3390/app112412147
Rega, A., Vitolo, F., Di Marino, C., and Patalano, S. (2021a). A knowledge-based approach to the layout optimization of human-robot collaborative workplace. Int. J. Interact. Des. Manuf. 15 (1), 133–135. doi:10.1007/s12008-020-00742-0
Reinhardt, D., Haeusler, M. H., London, K., Loke, L., Feng, Y. B., Barata, E. D., et al. (2020). CoBuilt 4.0: investigating the potential of collaborative robotics for subject matter experts. Int. J. Archit. Comput. 18 (4), 353–370. doi:10.1177/1478077120948742
Ren, T. Y., Dong, Y. F., Wu, D., and Chen, K. (2018). Collision detection and identification for robot manipulators based on extended state observer. Control Eng. Pract. 79, 144–153. doi:10.1016/j.conengprac.2018.07.004
Ren, T. Y., Dong, Y. F., Wu, D., and Chen, K. (2019a). Impedance control of collaborative robots based on joint torque servo with active disturbance rejection. Ind. Robot. Int. J. Robot. Res. Appl. 46 (4), 518–528. doi:10.1108/ir-06-2018-0130
Ren, T. Y., Dong, Y. F., Wu, D., and Chen, K. (2019b). Design of direct teaching behavior of collaborative robot based on force interaction. J. Intell. Robot. Syst. 96 (1), 83–93. doi:10.1007/s10846-019-00986-3
Restrepo, S. S., Raiola, G., Guerry, J., D'Elia, E., Lamy, X., and Sidobre, D. (2020). Toward an intuitive and iterative 6D virtual guide programming framework for assisted human-robot comanipulation. Robotica 38 (10), 1778–1806. doi:10.1017/s0263574720000016
Riedl, M., Denzl, R., Felberbauer, M., and Lankmair, T. (2019). High-resolution geometry measurement with a collaborative robot. MM Sci. J. 2019, 3386–3392. doi:10.17973/MMSJ.2019_11_2019097
Rodamilans, G. B., Villani, E., Trabasso, L. G., de Oliveira, W. R., and Suterio, R. (2016). A comparison of industrial robots interface: force guidance system and teach pendant operation. Int. J. Robot. Res. Appl. 43 (5), 552–562. doi:10.1108/ir-02-2016-0074
Rodrigues, I. R., Dantas, M., de Oliveira, A. T., Barbosa, G., Bezerra, D., Souza, R., et al. (2023). A framework for robotic arm pose estimation and movement prediction based on deep and extreme learning models. J. Supercomput 79 (7), 7176–7205. doi:10.1007/s11227-022-04936-z
Rojas, R. A., Garcia, M. A. R., Wehrle, E., and Vidoni, R. (2019). A variational approach to minimum-jerk trajectories for psychological safety in collaborative assembly stations. IEEE Robot. Autom. Lett. 4 (2), 823–829. doi:10.1109/lra.2019.2893018
Rojas, R. A., and Vidoni, R. (2021). Designing fast and smooth trajectories in collaborative workstations. IEEE Robot. Autom. Lett. 6 (2), 1700–1706. doi:10.1109/lra.2021.3058916
Rojas, R. A., Wehrle, E., and Vidoni, R. (2020). A multicriteria motion planning approach for combining smoothness and speed in collaborative assembly systems. Appl. Sci. Basel 10 (15), 5086. doi:10.3390/app10155086
Romiti, E., Malzahn, J., Kashiri, N., Iacobelli, F., Ruzzon, M., Laurenzi, A., et al. (2022). Toward a plug-and-work reconfigurable cobot. IEEE-ASME Trans. Mechatronics 27 (5), 3219–3231. doi:10.1109/tmech.2021.3106043
Ronzoni, M., Accorsi, R., Botti, L., and Manzini, R. (2021). A support-design framework for Cooperative Robots systems in labor-intensive manufacturing processes. J. Manuf. Syst. 61, 646–657. doi:10.1016/j.jmsy.2021.10.008
Rosin, F., Forget, P., Lamouri, S., and Pellerin, R. (2020). Impacts of industry 4.0 technologies on lean principles. Int. J. Prod. Res. 58 (6), 1644–1661. doi:10.1080/00207543.2019.1672902
Rossato, C., Pluchino, P., Cellini, N., Jacucci, G., Spagnolli, A., and Gamberini, L. (2021). Facing with collaborative robots: the subjective experience in senior and younger workers. Cyberpsychol Behav. Soc. Netw. 24 (5), 349–356. doi:10.1089/cyber.2020.0180
Rossi, F., Pini, F., Carlesimo, A., Dalpadulo, E., Blumetti, F., Gherardini, F., et al. (2020). Effective integration of Cobots and additive manufacturing for reconfigurable assembly solutions of biomedical products. Int. J. Interact. Des. Manuf. 14 (3), 1085–1089. doi:10.1007/s12008-020-00682-9
Rouzbeh, B., Bone, G. M., and Ashby, G. (2018). High-accuracy position control of a rotary pneumatic actuator. IEEE-ASME Trans. Mechatronics. 23 (6), 2774–2781. doi:10.1109/tmech.2018.2870177
Rouzbeh, B., Bone, G. M., Ashby, G., and Li, E. (2019). Design, implementation and control of an improved hybrid pneumatic-electric actuator for robot arms. IEEE Access 7, 14699–14713. doi:10.1109/access.2019.2891532
Roveda, L., Maskani, J., Franceschi, P., Abdi, A., Braghin, F., Tosatti, L. M., et al. (2020). Model-based reinforcement learning variable impedance control for human-robot collaboration. J. Intell. Robot. Syst. 100 (2), 417–433. doi:10.1007/s10846-020-01183-3
Rozo, L., Calinon, S., Caldwell, D. G., Jiménez, P., and Torras, C. (2016). Learning physical collaborative robot behaviors from human demonstrations. IEEE Trans. Robot. 32 (3), 513–527. doi:10.1109/tro.2016.2540623
Runge, G., and Raatz, A. (2017). A framework for the automated design and modelling of soft robotic systems. CIRP Ann. Manuf. Technol. 66 (1), 9–12. doi:10.1016/j.cirp.2017.04.104
Saenz, J., Behrens, R., Schulenburg, E., Petersen, H., Gibaru, O., Neto, P., et al. (2020). Methods for considering safety in design of robotics applications featuring human-robot collaboration. Int. J. Adv. Manuf. Technol. 107 (5-6), 2313–2331. doi:10.1007/s00170-020-05076-5
Safeea, M., Bearee, R., and Neto, P. (2022). An integrated framework for collaborative robot-assisted additive manufacturing. J. Manuf. Process 81, 406–413. doi:10.1016/j.jmapro.2022.06.067
Safeea, M., and Neto, P. (2019). Minimum distance calculation using laser scanner and IMUs for safe human-robot interaction. Robot. Comput. Integr. Manuf. 58, 33–42. doi:10.1016/j.rcim.2019.01.008
Safeea, M., and Neto, P. (2022). Precise positioning of collaborative robotic manipulators using hand-guiding. Int. J. Adv. Manuf. Technol. 120 (7-8), 5497–5508. doi:10.1007/s00170-022-09107-1
Safeea, M., Neto, P., and Bearee, R. (2019). On-line collision avoidance for collaborative robot manipulators by adjusting off-line generated paths: an industrial use case. Robot. Auton. Syst. 119, 278–288. doi:10.1016/j.robot.2019.07.013
Saito, T., and Ikeda, H. (2007). Development of normally closed type of magnetorheological clutch and its application to safe torque control system of human-collaborative robot. J. Intell. Mater Syst. Struct. 18 (12), 1181–1185. doi:10.1177/1045389x07084755
Salvato, E., Vanzella, W., Fenu, G., and Pellegrino, F. A. (2022). Singularity avoidance for cart-mounted hand-guided collaborative robots: a variational approach. Robot 11 (4), 79. doi:10.3390/robotics11040079
Santos, K. R. D., Villani, E., de Oliveira, W. R., and Dttman, A. (2022). Comparison of visual servoing technologies for robotized aerospace structural assembly and inspection. Robot. Comput. Integr. Manuf. 73, 102237. doi:10.1016/j.rcim.2021.102237
Sauer, V., Sauer, A., and Mertens, A. (2021). Zoomorphic gestures for communicating cobot states. IEEE Robot. Autom. Lett. 6 (2), 2179–2185. doi:10.1109/lra.2021.3060416
Savazzi, S., Nicoli, M., Bennis, M., Kianoush, S., and Barbieri, L. (2021). Opportunities of federated learning in connected, cooperative, and automated industrial systems. IEEE Commun. Mag. 59 (2), 16–21. doi:10.1109/mcom.001.2000200
Savkovic, M., Caiazzo, C., Djapan, M., Vukicevic, A. M., Pusica, M., and Macuzic, I. (2022). Development of modular and adaptive laboratory set-up for neuroergonomic and human-robot interaction research. Front. Neurorobot 16, 863637. doi:10.3389/fnbot.2022.863637
Scalera, L., Giusti, A., Vidoni, R., and Gasparetto, A. (2022). Enhancing fluency and productivity in human-robot collaboration through online scaling of dynamic safety zones. Int. J. Adv. Manuf. Technol. 121 (9-10), 6783–6798. doi:10.1007/s00170-022-09781-1
Schlette, C., Buch, A. G., Hagelskjær, F., Iturrate, I., Kraft, D., Kramberger, A., et al. (2020). Towards robot cell matrices for agile production - SDU Robotics' assembly cell at the WRC 2018. Adv. Robot. 34 (7-8), 422–438. doi:10.1080/01691864.2019.1686422
Schmidtler, J., Knott, V., Hölzel, C., and Bengler, K. (2015). Human centered assistance applications for the working environment of the future. Occup. Ergon. 12 (3), 83–95. doi:10.3233/OER-150226
Schou, C., Andersen, R. S., Chrysostomou, D., Bogh, S., and Madsen, O. (2018). Skill-based instruction of collaborative robots in industrial settings. Robot. Comput. Integr. Manuf. 53, 72–80. doi:10.1016/j.rcim.2018.03.008
Schou, C., and Madsen, O. (2017). A plug and produce framework for industrial collaborative robots. Int. J. Adv. Robot. Syst. 14 (4), 172988141771747. doi:10.1177/1729881417717472
Schulz, R., Kratzer, P., and Toussaint, M. (2018). Preferred interaction styles for human-robot collaboration vary over tasks with different action types. Front. Neurorobot 12, 36. doi:10.3389/fnbot.2018.00036
Scibilia, A., Valori, M., Pedrocchi, N., Fassi, I., Herbster, S., Behrens, R., et al. (2021). Analysis of interlaboratory safety related tests in power and force limited collaborative robots. IEEE Access 9, 80873–80882. doi:10.1109/access.2021.3085109
Scimmi, L. S., Melchiorre, M., Troise, M., Mauro, S., and Pastorelli, S. (2021). A practical and effective layout for a safe human-robot collaborative assembly task. Appl. Sci. Basel 11 (4), 1763. doi:10.3390/app11041763
Scoccia, C., Palmieri, G., Palpacelli, M. C., and Callegari, M. (2021). A collision avoidance strategy for redundant manipulators in dynamically variable environments: on-line perturbations of off-line generated trajectories. Machines 9 (2), 30. doi:10.3390/machines9020030
Semeraro, F., Griffiths, A., and Cangelosi, A. (2023). Human–robot collaboration and machine learning: a systematic review of recent research. Robot. Comput. Integr. Manuf. 79, 102432. doi:10.1016/j.rcim.2022.102432
Semjon, J., Janos, R., Sukop, M., Tuleja, P., Hajduk, M., Jurus, O., et al. (2020). Verification of the UR5 robot's properties after a crash caused by a fall of a transferred load from a crane. Int. J. Adv. Robot. Syst. 17 (1). doi:10.1177/1729881420904209
Sharkawy, A. N., Koustoumpardis, P. N., and Aspragathos, N. (2020a). Human-robot collisions detection for safe human-robot interaction using one multi-input-output neural network. Soft Comput. 24 (9), 6687–6719. doi:10.1007/s00500-019-04306-7
Sharkawy, A. N., Koustoumpardis, P. N., and Aspragathos, N. (2020b). Neural network design for manipulator collision detection based only on the joint position sensors. Robotica 38 (10), 1737–1755. doi:10.1017/s0263574719000985
Shin, D. Y., Jung, M. J., Lee, K. B., Lee, K. D., and Kim, W. H. (2022). A study on the improvement of torque density of an axial slot-less flux permanent magnet synchronous motor for collaborative robot. Energies 15 (9), 3464. doi:10.3390/en15093464
Shin, H., Kim, S., Seo, K., and Rhim, S. (2019). A virtual pressure and force sensor for safety evaluation in collaboration robot application. Sensors 19 (19), 4328. doi:10.3390/s19194328
Shukla, D., Erkent, Ö., and Piater, J. (2018). A comparative study of botulinum toxin: a with triamcinolone compared to triamcinolone alone in the treatment of osteoarthritis of knee, Anesth. Essays Res., 12, 47, 49. doi:10.4103/aer.AER_210_17
Sidobre, D., and Desornneaux, K. (2019). Smooth cubic polynomial trajectories for human-robot interactions. J. Intell. Robot. Syst. 95 (3-4), 851–869. doi:10.1007/s10846-018-0936-z
Simao, M., Neto, P., and Gibaru, O. (2019b). Improving novelty detection with generative adversarial networks on hand gesture data. Neurocomputing 358, 437–445. doi:10.1016/j.neucom.2019.05.064
Simao, M. A., Gibaru, O., and Neto, P. (2019a). Online recognition of incomplete gesture data to interface collaborative robots. IEEE Trans. Ind. Electron 66 (12), 9372–9382. doi:10.1109/tie.2019.2891449
Simas, H., and Di Gregorio, R. (2022). Collision avoidance for redundant 7-DOF robots using a critically damped dynamic approach. Robot 11 (5), 93. doi:10.3390/robotics11050093
Simoes, A. C., Pinto, A., Santos, J., Pinheiro, S., and Romero, D. (2022). Designing human-robot collaboration (HRC) workspaces in industrial settings: a systematic literature review. J. Manuf. Syst. 62, 28–43. doi:10.1016/j.jmsy.2021.11.007
Simoes, A. C., Soares, A. L., and Barros, A. C. (2020). Factors influencing the intention of managers to adopt collaborative robots (cobots) in manufacturing organizations. J. Eng. Technol. Manag. 57, 101574. doi:10.1016/j.jengtecman.2020.101574
Singh, J., Srinivasan, A. R., Neumann, G., and Kucukyilmaz, A. (2020). Haptic-guided teleoperation of a 7-DoF collaborative robot arm with an identical twin master. IEEE Trans. Haptics 13 (1), 246–252. doi:10.1109/toh.2020.2971485
Skulj, G., Vrabic, R., and Podrzaj, P. (2021). A wearable IMU system for flexible teleoperation of a collaborative industrial robot. Sensors 21 (17), 5871. doi:10.3390/s21175871
Smrcek, J., Smeringai, P., and Smeringaiova, A. (2022). SpinBOT kit the new generation of robots - analysis of operating characteristics. MM Sci. J. 2022, 6216–6219. doi:10.17973/mmsj.2022_12_2022010
Soares, I., Petry, M., and Moreira, A. P. (2021). Programming robots by demonstration using augmented reality. Sensors 21 (17), 5976. doi:10.3390/s21175976
Solanes, J. E., Gracia, L., Muñoz-Benavent, P., Miro, J. V., Carmichael, M. G., and Tornero, J. (2018a). Human-robot collaboration for safe object transportation using force feedback. Robot. Auton. Syst. 107, 196–208. doi:10.1016/j.robot.2018.06.003
Solanes, J. E., Gracia, L., Muñoz-Benavent, P., Miro, J. V., Girbés, V., and Tornero, J. (2018b). Human-robot cooperation for robust surface treatment using non-conventional sliding mode control. ISA Trans. 80, 528–541. doi:10.1016/j.isatra.2018.05.013
Sorell, T. (2022). Cobots, “co-operation” and the replacement of human skill. Ethics Inf. Technol. 24 (4), 44. doi:10.1007/s10676-022-09667-6
Stadnicka, D., and Antonelli, D. (2019). Human-robot collaborative work cell implementation through lean thinking. Int. J. Comput. Integr. Manuf. 32 (6), 580–595. doi:10.1080/0951192x.2019.1599437
Stecke, K. E., and Mokhtarzadeh, M. (2022). Balancing collaborative human-robot assembly lines to optimise cycle time and ergonomic risk. Int. J. Prod. Res. 60 (1), 25–47. doi:10.1080/00207543.2021.1989077
Stenmark, M., Haage, M., Topp, E. A., and Malec, J. (2018). Supporting semantic capture during kinesthetic teaching of collaborative industrial robots. Int. J. Semant. Comput. 12 (01), 167–186. doi:10.1142/s1793351x18400093
Storm, F. A., Chiappini, M., Dei, C., Piazza, C., André, E., Reissner, N., et al. (2022). Physical and mental well-being of cobot workers: a scoping review using the Software-Hardware-Environment-Liveware-Liveware-Organization model. Hum. Factors Ergon. Manuf. Serv. Ind. 32 (5), 419–435. doi:10.1002/hfm.20952
Stradovnik, S., and Hace, A. (2022). Task-Oriented evaluation of the feasible kinematic directional capabilities for robot machining. Sensors 22 (11), 4267. doi:10.3390/s22114267
Strazdas, D., Hintz, J., and Al-Hamadi, A. (2021). Robo-HUD: interaction concept for contactless operation of industrial cobotic systems. Appl. Sci. Basel 11 (12), 5366. doi:10.3390/app11125366
Sultan, T., Xu, X. C., Rozin, E. H., Sorjonen, J., Ketolainen, J., Wikström, H., et al. (2022). Effect of shape on the physical properties of pharmaceutical tablets. Int. J. Pharm. 624, 121993. doi:10.1016/j.ijpharm.2022.121993
Surdilovic, D., Bernhardt, R., and Zhang, L. (2003). New intelligent power-assist systems based on differential transmission. Robotica 21, 295–302. doi:10.1017/s0263574702004800
Svarny, P., Rozlivek, J., Rustler, L., Sramek, M., Deli, O., Zillich, M., et al. (2022). Effect of active and passive protective soft skins on collision forces in human-robot collaboration. Robot Comput. Integr. Manuf. 78, 102363. doi:10.1016/j.rcim.2022.102363
Svejda, M., Goubej, M., Jáger, A., Reitinger, J., and Severa, O. (2022). Affordable motion tracking system for intuitive programming of industrial robots. Sensors 22 (13), 4962. doi:10.3390/s22134962
Tadese, M., Pico, N., Seo, S., and Moon, H. (2022). A two-step method for dynamic parameter identification of Indy7 collaborative robot manipulator. Sensors 22 (24), 9708. doi:10.3390/s22249708
Tadese, M. A., Yumbla, F., Yi, J. S., Lee, W., Park, J., and Moon, H. (2021). Passivity guaranteed dynamic friction model with temperature and load correction: modeling and compensation for collaborative industrial robot. IEEE Access 9, 71210–71221. doi:10.1109/access.2021.3076308
Tamas, L., and Murar, M. (2019). Smart CPS: vertical integration overview and user story with a cobot. Int. J. Comput. Integr. Manuf. 32 (4-5), 504–521. doi:10.1080/0951192x.2018.1535196
Tang, G., Asif, S., and Webb, P. (2015). The integration of contactless static pose recognition and dynamic hand motion tracking control system for industrial human and robot collaboration. Ind. Robot. Int. J. Robot. Res. Appl. 42 (5), 416–428. doi:10.1108/ir-03-2015-0059
Tannous, M., Miraglia, M., Inglese, F., Giorgini, L., Ricciardi, F., Pelliccia, R., et al. (2020). Haptic-based touch detection for collaborative robots in welding applications. Robot. Comput. Integr. Manuf. 64, 101952. doi:10.1016/j.rcim.2020.101952
Tao, H., Rahman, M. A., Al-Saffar, A., Zhang, R. R., Salih, S. Q., Zain, J. M., et al. (2021). Security robot for the prevention of workplace violence using the non-linear adaptive heuristic mathematical model. Work A J. Prev. Assess. Rehabil. 68 (3), 853–861. doi:10.3233/wor-203419
Tarbouriech, S., Navarro, B., Fraisse, P., Crosnier, A., Cherubini, A., and Salle, D. (2022). An admittance based hierarchical control framework for dual-arm cobots. Mechatronics 86, 102814. doi:10.1016/j.mechatronics.2022.102814
Tarbouriech, S., and Suleiman, W. (2020). Bi-Objective motion planning approach for safe motions: application to a collaborative robot. J. Intell. Robot. Syst. 99 (1), 45–63. doi:10.1007/s10846-019-01110-1
Teso-Fz-Betoño, D., Zulueta, E., Fernandez-Gamiz, U., Aramendia, I., and Uriarte, I. (2019). A free navigation of an AGV to a non-static target with obstacle avoidance. Electronics 8 (2), 159. doi:10.3390/electronics8020159
Tricco, A. C., Lillie, E., Zarin, W., O'Brien, K. K., Colquhoun, H., Levac, D., et al. (2018). PRISMA extension for scoping reviews (PRISMA-ScR): checklist and explanation. Ann. Intern Med. 169 (7), 467–473. doi:10.7326/m18-0850
Tsarouchi, P., Makris, S., and Chryssolouris, G. (2016). Human–robot interaction review and challenges on task planning and programming. Int. J. Comput. Integr. Manuf. 29 (8), 916–931. doi:10.1080/0951192x.2015.1130251
Tsuji, S., and Kohama, T. (2019). Proximity skin sensor using time-of-flight sensor for human collaborative robot. IEEE Sens. J. 19 (14), 5859–5864. doi:10.1109/jsen.2019.2905848
Tsuji, S., and Kohama, T. (2020). Self-capacitance proximity and tactile skin sensor with Shock-absorbing structure for a collaborative robot. IEEE Sens. J. 20 (24), 15075–15084. doi:10.1109/jsen.2020.3011701
Tsuji, S., and Kohama, T. (2022). Sensor module combining time-of-flight with self-capacitance proximity and tactile sensors for robot. IEEE Sens. J. 22 (1), 858–866. doi:10.1109/jsen.2021.3130230
Ubeda, R. P., Rubert, S. G. C., Stanisic, R. Z., and Ivars, A. P. (2021). Behavioural study of the force control loop used in a collaborative robot for sanding materials. Materials 14 (1). doi:10.3390/ma14010067
Unhelkar, V. V., Lasota, P. A., Tyroller, Q., Buhai, R. D., Marceau, L., Deml, B., et al. (2018). Human-aware robotic assistant for collaborative assembly: integrating human motion prediction with planning in time. IEEE Robot. Autom. Lett. 3 (3), 2394–2401. doi:10.1109/lra.2018.2812906
Vagas, M., and Galajdova, A. (2021). Application of speed and separation monitoring technique at automated assembly process. MM Sci. J. 2021, 4420–4423. doi:10.17973/mmsj.2021_6_2021036
Vagas, M., and Galajdova, A. (2022). Methodology for cobots implementation into the assembly applications. MM Sci. J. 2022, 5638–5642. doi:10.17973/mmsj.2022_06_2022016
Vaher, K., Mahmood, K., Otto, T., and Riives, J. (2021). Simulation based feasibility analysis of autonomously movable robot arm. Proc. Est. Acad. Sci. 70 (4), 422–428. doi:10.3176/proc.2021.4.08
Valente, A., Pavesi, G., Zamboni, M., and Carpanzano, E. (2022). Deliberative robotics-a novel interactive control framework enhancing human-robot collaboration. CIRP Ann. Manuf. Technol. 71 (1), 21–24. doi:10.1016/j.cirp.2022.03.045
Valori, M., Scibilia, A., Fassi, I., Saenz, J., Behrens, R., Herbster, S., et al. (2021). Validating safety in human-robot collaboration: standards and new perspectives. Robot 10 (2), 65. doi:10.3390/robotics10020065
N. J. van Eck, and L. Waltman (2007). “VOS: a new method for visualizing Similarities between objects,” Advances in data analysis (Berlin, Heidelberg: Springer Berlin Heidelberg).
van Eck, N. J., and Waltman, L. (2010). Software survey: VOSviewer, a computer program for bibliometric mapping. Scientometrics 84 (2), 523–538. doi:10.1007/s11192-009-0146-3
van Nunen, K., Li, J., Reniers, G., and Ponnet, K. (2018). Bibliometric analysis of safety culture research. Saf. Sci. 108, 248–258. doi:10.1016/j.ssci.2017.08.011
Vemula, B., Matthias, B., and Ahmad, A. (2018). A design metric for safety assessment of industrial robot design suitable for power-and force-limited collaborative operation. Int. J. Intell. Robot. Appl. 2 (2), 226–234. doi:10.1007/s41315-018-0055-9
Verma, S., and Singh, V. (2024). The employees intention to work in artificial intelligence-based hybrid environments. IEEE Trans. Eng. Manag. 71, 3266–3277. doi:10.1109/tem.2022.3193664
Vicentini, F. (2020). Terminology in safety of collaborative robotics. Robot. Comput. Integr. Manuf. 63, 101921. doi:10.1016/j.rcim.2019.101921
Vicentini, F. (2021). Collaborative robotics: a survey. J. Mech. Des. 143 (4). doi:10.1115/1.4046238
Vicentini, F., Askarpour, M., Rossi, M. G., and Mandrioli, D. (2020). Safety assessment of collaborative robotics through automated formal verification. IEEE Trans. Robot. 36 (1), 42–61. doi:10.1109/tro.2019.2937471
Villani, V., Pini, F., Leali, F., and Secchi, C. (2018). Survey on human-robot collaboration in industrial settings: safety, intuitive interfaces and applications. Mechatronics 55, 248–266. doi:10.1016/j.mechatronics.2018.02.009
Virgala, I., Prada, E., and Vagas, M. (2021). Power and force limiting technique at collaborative workplace. MM Sci. J. 2021, 4424–4427. doi:10.17973/mmsj.2021_6_2021037
Vitolo, F., Rega, A., Di Marino, C., Pasquariello, A., Zanella, A., and Patalano, S. (2022). Mobile robots and cobots integration: a preliminary design of a mechatronic interface by using mbse approach. Appl. Sci. Basel 12 (1), 419. doi:10.3390/app12010419
Vocetka, M., Suder, J., and Huczala, D. (2020). The use of the two-handed collaborative robot in non-collaborative application. Acta Polytech. 60 (2), 151–157. doi:10.14311/ap.2020.60.0151
Vysocky, A., Grushko, S., Oscádal, P., Kot, T., Babjak, J., János, R., et al. (2020b). Analysis of precision and stability of hand tracking with leap motion sensor. Sensors. 20 (15), 4088. doi:10.3390/s20154088
Vysocky, A., and Novak, P. (2016). Human-robot collaboration in industry. MM Sci. J. 9 (2), 903–906. doi:10.17973/mmsj.2016_06_201611
Vysocky, A., Paprok, R., Safarík, J., Kot, T., Bobovsky, Z., Novák, P., et al. (2020a). Reduction in robotic arm energy consumption by particle swarm optimization. Appl. Sci. Basel 10 (22), 8241. doi:10.3390/app10228241
Wahrburg, A., Bös, J., Listmann, K. D., Dai, F., Matthias, B., and Ding, H. (2018). Motor-current-based estimation of cartesian contact forces and torques for robotic manipulators and its application to force control. IEEE Trans. Autom. Sci. Eng. 15 (2), 879–886. doi:10.1109/TASE.2017.2691136
Wang, J., Chen, Y., Huo, S., Mai, L., and Jia, F. (2023a). Research hotspots and trends of social robot interaction design: a bibliometric analysis. Sensors 23 (23), 9369. doi:10.3390/s23239369
Wang, L. H. (2015). Collaborative robot monitoring and control for enhanced sustainability. Int. J. Adv. Manuf. Technol. 81 (9-12), 1433–1445. doi:10.1007/s00170-013-4864-6
Wang, L. K., Jia, S. Y., Wang, G. Y., Turner, A., and Ratchev, S. (2023b). Enhancing learning capabilities of movement primitives under distributed probabilistic framework for flexible assembly tasks. Neural Comput. Appl. 35 (32), 23453–23464. doi:10.1007/s00521-021-06543-0
Wang, L. K., Wang, G. Y., Jia, S. Y., Turner, A., and Ratchev, S. (2022a). Imitation learning for coordinated human-robot collaboration based on hidden state-space models. Robot. Comput. Integr. Manuf. 76, 102310. doi:10.1016/j.rcim.2021.102310
Wang, Q., Liu, D. K., Carmichael, M. G., Aldini, S., and Lin, C. T. (2022b). Computational model of robot trust in human Co-worker for physical human-robot collaboration. IEEE Robot. Autom. Lett. 7 (2), 3146–3153. doi:10.1109/lra.2022.3145957
Wang, W., Li, R., Diekel, Z. M., and Jia, Y. (2018). Robot action planning by online optimization in human–robot collaborative tasks. Int. J. Intell. Robot. Appl. 2, 161–179. doi:10.1007/s41315-018-0054-x
Wang, W. T., Li, R., Chen, Y., Diekel, Z. M., and Jia, Y. Y. (2019a). Facilitating human-robot collaborative tasks by teaching-learning-collaboration from human demonstrations. IEEE Trans. Autom. Sci. Eng. 16 (2), 640–653. doi:10.1109/tase.2018.2840345
Wang, W. T., Li, R., Diekel, Z. M., Chen, Y., Zhang, Z. J., and Jia, Y. Y. (2019b). Controlling object hand-over in human-robot collaboration via natural wearable sensing. IEEE Trans. Hum. Mach. Syst. 49 (1), 59–71. doi:10.1109/thms.2018.2883176
Wang, Y. Q., Hu, Y. D., El Zaatari, S., Li, W. D., and Zhou, Y. (2021). Optimised learning from demonstrations for collaborative robots. Robot. Comput. Integr. Manuf. 71, 102169. doi:10.1016/j.rcim.2021.102169
Watson, J., Miller, A., and Correll, N. (2020). Autonomous industrial assembly using force, torque, and RGB-D sensing. Adv. Robot. 34 (7-8), 546–559. doi:10.48550/arXiv.2002.02580
Weckenborg, C., Thies, C., and Spengler, T. S. (2022). Harmonizing ergonomics and economics of assembly lines using collaborative robots and exoskeletons. J. Manuf. Syst. 62, 681–702. doi:10.1016/j.jmsy.2022.02.005
Weiss, A., Wortmeier, A. K., and Kubicek, B. (2021). Cobots in industry 4.0: a roadmap for future practice studies on human-robot collaboration. IEEE Trans. Hum. Mach. Syst. 51 (4), 335–345. doi:10.1109/thms.2021.3092684
Weistroffer, V., Keith, F., Bisiaux, A., Andriot, C., and Lasnier, A. (2022). Using physics-based digital twins and extended reality for the safety and ergonomics evaluation of cobotic workstations. Front. Virtual Real 3. doi:10.3389/frvir.2022.781830
Weitschat, R., and Aschemann, H. (2018). Safe and efficient human-robot collaboration Part II: optimal generalized human-in-the-loop real-time motion generation. IEEE Robot. Autom. Lett. 3 (4), 3781–3788. doi:10.1109/lra.2018.2856531
Wittmann, J., and Rixen, D. J. (2022). Time-optimization of trajectories using zero-clamped cubic splines and their analytical gradients. IEEE Robot. Autom. Lett. 7 (2), 4528–4534. doi:10.1109/lra.2022.3148468
Wojtynek, M., Steil, J. J., and Wrede, S. (2019). Plug, plan and produce as enabler for easy workcell setup and collaborative robot programming in smart factories. Kunstl Intell. 33 (2), 151–161. doi:10.1007/s13218-019-00595-0
Wolfartsberger, J., Haslwanter, J. D. H., and Lindorfer, R. (2019). Perspectives on assistive systems for manual assembly tasks in industry. Technologies 7 (1), 12. doi:10.3390/technologies7010012
World Bank (2025). World Bank group. Available online at: https://data.worldbank.org.
Worsnopp, T., Peshkin, M., Lynch, K., and Colgate, J. E. (2006). Controlling the apparent inertia of passive human-interactive robots. J. Dyn. Syst. Meas. Control Trans. ASME 128 (1), 44–52. doi:10.1115/1.2168165
Wu, H., Liu, Y., Chang, R., and Wu, L. (2024). Research status quo and trends of construction robotics: a bibliometric analysis. J. Comput. Civ. Eng. 38 (1), 03123001. doi:10.1061/jccee5.cpeng-5274
Wu, Y. Q., Lamon, E., Zhao, F., Kim, W., and Ajoudani, A. (2021). Unified approach for hybrid motion control of MOCA based on weighted whole-body cartesian impedance formulation. IEEE Robot. Autom. Lett. 6 (2), 3505–3512. doi:10.1109/lra.2021.3062316
Xiao, J. L., Dou, S. X., Zhao, W., and Liu, H. T. (2021). Sensorless human-robot collaborative assembly considering load and friction compensation. IEEE Robot. Autom. Lett. 6 (3), 5945–5952. doi:10.1109/lra.2021.3088789
Xiao, J. L., Zhang, Q. L., Hong, Y., Wang, G. D., and Zeng, F. (2018). Collision detection algorithm for collaborative robots considering joint friction. Int. J. Adv. Robot. Syst. 15 (4). doi:10.1177/1729881418788992
Xu, S. L., and He, B. (2022). A compliance modeling method of flexible rotary joint for collaborative robot using passive network synthesis theory. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 236 (8), 4038–4048. doi:10.1177/09544062211047113
Yamada, S., and Fujimoto, H. (2021). Position-based high backdrivable control using load-side encoder and backlash. IEEJ J. Ind. Appl. 10 (2), 142–152. doi:10.1541/ieejjia.20004583
Yan, Z. C., He, W., Wang, Y. H., Sun, L., Yu, X. B., and He, W. (2024). Probabilistic motion prediction and skill learning for human-to-cobot dual-arm handover control. IEEE Trans. Neural Netw. Learn Syst. 35 (1), 1192–1204. doi:10.1109/tnnls.2022.3182973
Yang, Y., Reniers, G., Chen, G., and Goerlandt, F. (2019). A bibliometric review of laboratory safety in universities. Saf. Sci. 120, 14–24. doi:10.1016/j.ssci.2019.06.022
Ye, L., Xiong, G. L., Zeng, C., and Zhang, H. (2020b). Trajectory tracking control of 7-DOF redundant robot based on estimation of intention in physical human-robot interaction. Sci. Prog. 103 (3), 36850420953642. doi:10.1177/0036850420953642
Ye, Z. Q., Pang, G. Y., Xu, K. C., Hou, Z. Y., Lv, H. H., Shen, Y. R., et al. (2022). Soft robot skin with conformal adaptability for on-body tactile perception of collaborative robots. IEEE Robot. Autom. Lett. 7 (2), 5127–5134. doi:10.1109/lra.2022.3155225
Ye, Z. Q., Yang, G., Pang, G. Y., Huang, X. Y., and Yang, H. Y. (2020a). Design and implementation of robot skin using highly sensitive sponge sensor. IEEE Trans. Med. Robot. Bionics. 2 (4), 670–680. doi:10.1109/tmrb.2020.3020320
Yeamkuan, S., Chamnongthai, K., and Pichitwong, W. (2022). A 3D point-of-intention estimation method using multimodal fusion of hand pointing, eye gaze and depth sensing for collaborative robots. IEEE Sens. J. 22 (3), 2700–2710. doi:10.1109/jsen.2021.3133471
Yen, S. H., Tang, P. C., Lin, Y. C., and Lin, C. Y. (2019). Development of a virtual force sensor for a low-cost collaborative robot and applications to safety control. Sensors 19 (11), 2603. doi:10.3390/s19112603
Yu, T., Huang, J., and Chang, Q. (2020). Mastering the working sequence in human-robot collaborative assembly based on reinforcement learning. IEEE Access 8, 163868–163877. doi:10.1109/access.2020.3021904
Yun, A., Lee, W., Kim, S., Kim, J. H., and Yoon, H. (2022a). Development of a robot arm link system embedded with a three-Axis sensor with a simple structure capable of excellent external collision detection. Sensors 22 (3), 1222. doi:10.3390/s22031222
Yun, H. T., Jeon, H., Yang, S. H., and Jun, M. B. G. (2022b). Calibration of industrial robots with spherical joint using single wire encoder. Manuf. Lett. 33, 46–50. doi:10.1016/j.mfglet.2022.07.120
Zaccaria, F., Baldassarri, A., Palli, G., and Carricato, M. (2021). A mobile robotized system for depalletizing applications: design and experimentation. IEEE Access 9, 96682–96691. doi:10.1109/access.2021.3092580
Zacharaki, A., Kostavelis, I., and Dokas, I. (2021). Decision making with STPA through markov decision process, a theoretic framework for safe human-robot collaboration. Appl. Sci. Basel 11 (11), 5212. doi:10.3390/app11115212
Zafar, M. H., Langås, E. F., and Sanfilippo, F. (2024). Exploring the synergies between collaborative robotics, digital twins, augmentation, and industry 5.0 for smart manufacturing: a state-of-the-art review. Robot. Comput. Integr. Manuf. 89, 102769. doi:10.1016/j.rcim.2024.102769
Zaid, I. M., Halwani, M., Ayyad, A., Imam, A., Almaskari, F., Hassanin, H., et al. (2022). Elastomer-based visuotactile sensor for normality of robotic manufacturing systems. Polymers 14 (23), 5097. doi:10.3390/polym14235097
Zanchettin, A. M., Messeri, C., Cristantielli, D., and Rocco, P. (2022). Trajectory optimisation in collaborative robotics based on simulations and genetic algorithms. Int. J. Intell. Robot. Appl. 6 (4), 707–723. doi:10.1007/s41315-022-00240-4
Zanchettin, A. M., and Rocco, P. (2017). Motion planning for robotic manipulators using robust constrained control. Control Eng. Pract. 59, 127–136. doi:10.1016/j.conengprac.2016.11.010
Zemlyak, S., Gusarova, O., and Sivakova, S. (2022). Assessing the influence of collaborative technology adoption-mediating role of sociotechnical, organizational, and economic factors. Sustainability 14 (21), 14271. doi:10.3390/su142114271
Zeng, C., Yang, C. G., Zhong, J. P., and Zhang, J. W. (2019b). Encoding multiple sensor data for robotic learning skills from multimodal demonstration. IEEE Access 7, 145604–145613. doi:10.1109/access.2019.2945484
Zeng, F., Xiao, J. L., and Liu, H. T. (2019a). Force/torque sensorless compliant control strategy for assembly tasks using a 6-DOF collaborative robot. IEEE Access 7, 108795–108805. doi:10.1109/access.2019.2931515
Zeng, L. Q., and Bone, G. M. (2013). Design of elastomeric foam-covered robotic manipulators to enhance human safety. Mech. Mach. Theory 60, 1–27. doi:10.1016/j.mechmachtheory.2012.09.010
Zhang, G., Xu, Z., Hou, Z. C., Yang, W. L., Liang, J. M., Yang, G., et al. (2020). A systematic error compensation strategy based on an optimized recurrent neural network for collaborative robot dynamics. Appl. Sci. Basel 10 (19), 6743. doi:10.3390/app10196743
Zhang, J. J., Wang, P., and Gao, R. X. (2021d). Hybrid machine learning for human action recognition and prediction in assembly. Robot. Comput. Integr. Manuf. 72, 102184. doi:10.1016/j.rcim.2021.102184
Zhang, R., Li, J., Zheng, P., Lu, Y. Q., Bao, J. S., and Sun, X. M. (2022b). A fusion-based spiking neural network approach for predicting collaboration request in human-robot collaboration. Robot. Comput. Integr. Manuf. 78, 102383. doi:10.1016/j.rcim.2022.102383
Zhang, S., Li, S. Q., Li, X., Xiong, Y. J., and Xie, Z. (2022c). A human-robot dynamic fusion safety algorithm for collaborative operations of cobots. J. Intell. Robot. Syst. 104 (1), 18. doi:10.1007/s10846-021-01534-8
Zhang, S., Li, S. Q., Wang, H. P., and Li, X. (2022d). An intelligent manufacturing cell based on human-robot collaboration of frequent task learning for flexible manufacturing. Int. J. Adv. Manuf. Technol. 120 (9-10), 5725–5740. doi:10.1007/s00170-022-09005-6
Zhang, S. L., Ge, Y. G., Wang, H. T., and Wang, S. (2021c). Mechanical design and dynamic compliance control of lightweight manipulator. Int. J. Autom. Comput. 18 (6), 926–934. doi:10.1007/s11633-021-1311-2
Zhang, T., and Hong, J. D. (2019). Collision detection method for industrial robot based on envelope-like lines. Int. J. Robot. Res. Appl. 46 (4), 510–517. doi:10.1108/ir-12-2018-0261
Zhang, Y. J., Huang, N. J., Radwin, R. G., Wang, Z., and Li, J. S. (2022a). Flow time in a human-robot collaborative assembly process: performance evaluation, system properties, and a case study. IISE Trans. 54 (3), 238–250. doi:10.1080/24725854.2021.1907489
Zhang, Y. J., Liu, L., Huang, N. J., Radwin, R., and Li, J. S. (2021a). From manual operation to collaborative robot assembly: an integrated model of productivity and ergonomic performance. IEEE Robot. Autom. Lett. 6 (2), 895–902. doi:10.1109/lra.2021.3052427
Zhang, Z. J., Qian, K., Schuller, B. W., and Wollherr, D. (2021b). An online robot collision detection and identification scheme by supervised learning and bayesian decision theory. IEEE Trans. Autom. Sci. Eng. 18 (3), 1144–1156. doi:10.1109/tase.2020.2997094
Zhao, Y. T., Chen, J., and Li, W. G. (2022). Improved whale algorithm and its application in cobot excitation trajectory optimization. Int. J. Intell. Robot. Appl. 6 (4), 615–624. doi:10.1007/s41315-022-00264-w
Zhen, S. C., Cui, W. X., Liu, X. L., Meng, G. J., and Chen, Y. H. (2022). A novel model-based robust control design for collaborative robot joint module. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 236 (9), 4520–4532. doi:10.1177/09544062211054753
Zhou, Z. X., Li, L. H., Fursterling, A., Durocher, H. J., Mouridsen, J., and Zhang, X. P. (2022). Learning-based object detection and localization for a mobile robot manipulator in SME production. Robot. Comput. Integr. Manuf. 73, 102229. doi:10.1016/j.rcim.2021.102229
Zhu, M. L., Huang, C., Qiu, Z. Q., Zheng, W., and Gong, D. W. (2022). Parallel image-based visual servoing/force control of a collaborative delta robot. Front. Neurorobot 16, 922704. doi:10.3389/fnbot.2022.922704
Zimmermann, J., Huelke, M., and Clermont, M. (2022). Experimental comparison of biofidel measuring devices used for the validation of collaborative robotics applications. Int. J. Environ. Res. Public Health 19 (20), 13657. doi:10.3390/ijerph192013657
Keywords: collaborative robotics, cobot, scoping review, bibliometric analysis, cobotics research trends, safety
Citation: Haghighi A, Cheraghi M, Pocachard J, Botta-Genoulaz V, Jocelyn S and Pourzarei H (2025) A comprehensive review and bibliometric analysis on collaborative robotics for industry: safety emerging as a core focus. Front. Robot. AI 12:1605682. doi: 10.3389/frobt.2025.1605682
Received: 03 April 2025; Accepted: 16 July 2025;
Published: 12 September 2025.
Edited by:
Oscar De Silva, Memorial University of Newfoundland, CanadaReviewed by:
Riccardo Minto, University of Padua, ItalyElias Montini, University of Applied Sciences and Arts of Italian Switzerland, Switzerland
Copyright © 2025 Haghighi, Cheraghi, Pocachard, Botta-Genoulaz, Jocelyn and Pourzarei. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Aida Haghighi, YWlkYS5oYWdoaWdoaUB0b3JvbnRvbXUuY2E=