 Chantal Klier
Chantal Klier Birgit Lugrin
Birgit Lugrin- Chair of Computer Science V (Socially Interactive Agents), University of Würzburg, Würzburg, Germany
This article gives a new perspective on designing robotic applications in elderly care with a special focus on socially assistive robots and seniors’ well-being. While various applications have been proposed there is currently no common conceptual model in designing interventions with social robots for seniors. Therefore, we propose a conceptual model that identifies five key domains for designing applications for socially interactive robots to enhance seniors’ well-being. We base our conceptual model on established theories from the social sciences. Namely, we propose that application design should consider integrating Self-Determination Theory by addressing the three basic psychological needs (autonomy, competence, and relatedness) to enhance seniors’ wellbeing. Furthermore, we recommend assessing the impact of social robots on well-being using the five building blocks of the PERMA framework: positive emotions, engagement, relationships, meaning, and accomplishment. By integrating these theoretical perspectives, researchers and developers gain a structured approach to designing social robot applications for cognitively healthy older adults and evaluating their effects.
1 Introduction
The global population is aging, and in Germany alone, a shortage of 690,000 caregivers is projected by 2049 (Statistisches Bundesamt, 2024). Even where staff are available, many residents in nursing homes remain unoccupied for extended periods (Ice, 2002). Consequently, the integration of robotic technologies into elderly care has been the focus of research for several years with various types of assistive robots serving different purposes. While numerous prototypes and research platforms exist, such as robotic drink assistants (Schroer et al., 2015) or walking aid robots (Zhao et al., 2022), these devices typically do not prioritize social interaction, are often expensive or not for sale.
In contrast, this paper focuses on socially interactive robots (Naseer et al., 2025) that are both affordable and commercially available. Often referred to as companion robots (Broekens et al., 2009), these robots are primarily designed to enhance the wellbeing of older adults (Bemelmans et al., 2012). Interventions using the seal robot Paro have demonstrated promising effects regarding individuals with dementia, such as improved mood (Wada et al., 2002), reduced loneliness (Robinson et al., 2013), and lower blood pressure (Robinson et al., 2015). Other notable applications include Pepper playing personalized music to stimulate memory in dementia patients (Kok et al., 2018), and NAO being used in therapy to reduce apathy (Valentí et al., 2015). Yet, a review of randomized controlled trials by Pu et al. (Pu et al., 2019) found no significant impact on the quality of life of older adults, most of whom had cognitive impairments. Still, their narrative review suggested improvements in engagement and interaction.
For seniors before the onset of dementia, often with mild cognitive impairments, promising approaches using social robots for cognitive training have been explored (Carolis et al., 2020), showing improvements in both cognition and emotional health (Vogan et al., 2020). Interestingly, Góngora Alonso et al. (Góngora Alonso et al., 2019) reported that elderly individuals without dementia or only mild cognitive impairments are less likely to accept robots, as they often do not see a need for them and wish to avoid being stigmatized as dependent (Wu et al., 2014). This reluctance may be related to the passive nature of robots like Paro, which have frequently been used in wellbeing studies in recent years (Scoglio et al., 2019). In contrast, more interactive robots offering quizzes or sing-alongs tend to help healthy older adults avoid boredom and develop a sense of attachment to the robot (Lee and Shin, 2024).
While much of the existing research centers on individuals with dementia or cognitive impairments (Abdi et al., 2018), there is a growing recognition of the need to explore how cognitively healthy older adults are affected by social robots (Nichol et al., 2024). When examining this group, there are already promising findings. For instance, Papadopoulos et al. (Papadopoulos et al., 2022) reported significant improvements in emotional wellbeing after 2 weeks of interaction with Pepper. Similarly, using NAO as a fitness coach led to high levels of likeability among seniors (Antonioni et al., 2021). Moreover, suggestions from social robots, whether physical, cognitive, or social, are perceived as persuasive (Hammer et al., 2016).
Building on this potential, the present paper focuses specifically on cognitively healthy older adults. Additionally, we do not adopt a deficit-oriented approach, such as aiming to reduce loneliness (Gasteiger et al., 2021a) or targeting depression (Yen et al., 2024). Instead, our focus is on fostering meaningful, enjoyable interactions that are emotionally rewarding, thereby promoting wellbeing and potentially preventing the emergence of negative emotional states.
Currently, much of the wellbeing oriented research emphasizes behavior change, such as promoting healthy eating (Robinson et al., 2020), or implementing positive psychology coaching (Jeong et al., 2020). However, we argue that a broader range of applications, beyond those aimed at behavior change, can contribute to maintaining or enhancing elderly wellbeing, provided they are intentionally designed with this goal in mind.
Therefore, in this paper, we propose a conceptual model grounded in psychological theory to guide the design of robotic applications for cognitively healthy older adults. In line with the need for theory-driven approaches (Trainum et al., 2023), our model combines the five building blocks of wellbeing from Seligman’s PERMA framework (Seligman, 2011) with core principles from Self-Determination Theory (SDT), specifically the fulfillment of basic psychological needs. While the integration of SDT into social robot design has also been suggested by Janssen and Schadenberg (Janssen and Schadenberg, 2024), through the METUX model (Peters et al., 2018) their approach focuses on user satisfaction and the development of new robots.
In contrast, our model is tailored to support the development of empirically testable applications for existing social robots in real-world settings. By grounding the design process in well-established theories and employing validated measures for both wellbeing and psychological need satisfaction, our model also addresses the call for a standardized approach to evaluate the effectiveness of social robots in elderly care (Andtfolk et al., 2022).
2 Theoretical foundation
In this section, we outline the theoretical foundation of our conceptual model. We begin by introducing Self-Determination Theory and its current relevance in the context of social robots. Next, we present three well-established models of wellbeing and discuss which we consider most suitable for our conceptual model.
2.1 Self-Determination Theory
SDT, proposed by Deci and Ryan (Deci and Ryan, 1985), comprises several so-called mini-theories. One of these is the Basic Psychological Needs Theory, which states that three fundamental needs must be satisfied to foster intrinsic motivation, personal growth, and wellbeing (Deci and Ryan, 2000). These universal needs are (Ryan et al., 2002):
• Autonomy: experiencing one’s actions as self-endorsed and aligned with personal interests and values, rather than being externally controlled.
• Competence: driving to pursue challenges that match one’s abilities, fostering continuous improvement and confidence in one’s actions.
• Relatedness: feeling emotionally connected to others, experiencing mutual care, and having a sense of belonging.
Research indicates that nursing home residents whose psychological needs are met report higher levels of wellbeing (Ferrand et al., 2014). Furthermore, greater perceived autonomy is associated with increased satisfaction (Bangerter et al., 2017). Interestingly, residents seem to prioritize relatedness over autonomy and competence, though with considerable individual variation (Custers et al., 2012). Notably, an SDT-driven physical activity intervention showed greater improvements in depression scores compared to a control group (Liu et al., 2024) and structured activities in long-term care reduce ill-being, primarily through enhanced relatedness (Duncan et al., 2017).
While the integration of those needs into social robotics has been limited, some studies showed promising results. Within the context of learning, van Minkelen et al. (van Minkelen et al., 2020) demonstrated that an SDT-supportive robot lead to increased task engagement and motivation in children. Recently, a social robot designed according to SDT principles significantly increased adult learners’ motivation compared to a control robot without such design (Lu et al., 2023). Given that SDT is a well-established framework for learning (Willems et al., 2012), it is not surprising that current integrations of SDT in social robotics predominantly focus on learning contexts.
In contrast, SDT-driven design has received little attention in social robotics for elderly care. We argue that this approach is particularly well-suited to the domain, as social robots naturally support psychological needs through their interactive presence. Unlike traditional care routines with fixed schedules, robots can offer on-demand activities, promoting autonomy and complementing occupational therapists (Wilson et al., 2016). They can also adapt content to individual skill levels, fostering competence more effectively than group activities led by a human caregiver. While they cannot replace human emotional bonds, their embodied and multimodal interactions (Breazeal et al., 2016) offer a more socially engaging experience than screen-based tools like tablets (Deublein et al., 2020), thereby supporting relatedness.
Several studies have indeed shown that the presence of social robots can support wellbeing among cognitively non-impaired older adults by offering companionship (Ge and Schleimer, 2023), emotional support (Tan et al., 2024), or being a game partner (Khosla et al., 2013). A promising example integrating SDT is the robotic exercise coach by Fasola and Mataric (Fasola and Mataric, 2013), which fostered intrinsic motivation by supporting older users’ autonomy. Based on these findings, we suggest that deliberately incorporating SDT into design could enhance the effectiveness of such interventions in promoting psychological well-being.
Beyond emphasizing the integration of SDT, we argue that the design of robotic applications should also be grounded in a coherent and appropriate framework of psychological wellbeing. Therefore, in the following section, we discuss which model we consider most suitable for guiding and assessing the impact of an SDT-oriented design on the wellbeing of older adults.
2.2 Psychological wellbeing
Psychological wellbeing is often set equal with “happiness”, aligning with a hedonic perspective (Kahneman, 1999). Psychological hedonism states that human behavior is primarily driven by wanting to either experience pleasure or avoid pain (Moore et al., 2019). In contrast, the eudaimonic perspective suggests that the basis of wellbeing is leading a meaningful life, marked by personal growth and self-realization (Waterman, 1993). Over the past decades, psychologists have developed various models and measures to assess mental wellbeing, differing in the degree to which they emphasize hedonic or eudaimonic foundations.
Diener defines subjective wellbeing (SWB) as comprising two components: affective and cognitive evaluations of one’s life (Diener et al., 2009). The affective component aligns with the hedonic perspective by experiencing positive or negative emotions (Diener, 1984). To assess this dimension, the frequently employed Positive and Negative Affect Schedule conceptualizes positive and negative emotions as distinct and independent constructs (Watson et al., 1988), demonstrating strong validity also for older adults (Kercher, 1992). The cognitive evaluation, on the other hand, represents an evaluative assessment of one’s life, often measured using the Satisfaction with Life Scale, that aims to capture a person’s overall life satisfaction (Diener et al., 1985).
In contrast to Diener’s hedonically inspired model of subjective wellbeing (Diener, 1984), Ryff’s model of psychological wellbeing (Ryff and Keyes, 1995) offers an alternative perspective. She argues that an affect-based approach, which emphasizes happiness and life satisfaction, fails to capture psychological functioning and overall mental wellbeing. Her model is inspired by eudaimonic principles and comprises six dimensions: Autonomy, Environmental Mastery, Personal Growth, Positive Relations with Others, Purpose in Life, and Self-Acceptance. These are assessed using Ryff’s Scales of Psychological Wellbeing (Ryff and Keyes, 1995).
While these models highlight different facets of wellbeing, with Diener focusing on hedonic and Ryff on eudaimonic aspects, Seligman (Seligman, 2011) proposes a more integrative approach. Unlike the dichotomy of hedonia and eudaimonia, he combines elements from both perspectives, offering a comprehensive understanding of human flourishing by defining five building blocks of wellbeing: Positive Emotion, Engagement, Relationships, Meaning, and Accomplishment (PERMA). Positive Emotion aligns with the hedonic perspective, emphasizing pleasure and life satisfaction, while the remaining components are rooted in eudaimonic principles, focusing on personal growth, purpose, and fulfillment. By integrating these dimensions, PERMA presents a holistic view of psychological wellbeing, acknowledging that both immediate happiness and long-term psychological fulfillment is essential for overall flourishing. Importantly, Seligman (Seligman, 2011) emphasizes that no single element defines wellbeing on its own. Rather, each contributes independently and is often pursued for its own sake. Based on this, the PERMA-Profiler assesses each of the five building blocks with three items (Butler and Kern, 2016). This scale has demonstrated effectiveness in assessing the wellbeing of elderly in an Iranian sample (Payoun et al., 2020) and is validated in German (Wammerl et al., 2019).
Having outlined three established models of wellbeing, we now discuss which is most appropriate for assessing the impact of social robots on older adults. While enhancing long-term wellbeing remains the ultimate design objective, measuring short-term effects is equally important, as situational wellbeing offers valuable insights for improving robotic applications.
Given that emotions play a central role in human-robot interaction (Spitale and Gunes, 2022), Ryff’s (Ryff and Keyes, 1995) eudaimonic model may overlooks this crucial aspect. Furthermore, dimensions such as Personal Growth, Purpose in Life, and Self-Acceptance are difficult to influence through short-term robotic interventions, making it challenging to evaluate application effects without longitudinal studies. Therefore, the other two models, SWB and PERMA, appear better suited for evaluating the effects of social robots on older adults, as both emphasize emotional experience.
Interestingly, Goodman et al. (Goodman et al., 2018) found that SWB and PERMA capture essentially the same underlying construct of wellbeing. Thus, either framework could validly serve as a basis for assessing the impact of social robot applications on senior wellbeing. However, compared to SWB, PERMA offers a more nuanced approach, enabling detailed analyses of wellbeing across different dimensions. This granularity makes PERMA particularly advantageous for evaluating situational wellbeing during human-robot interactions.
For instance, researchers measuring the impact of social robots may not observe immediate changes in overall life satisfaction, since it is cognitively evaluated over a longer period. However, they may detect variations in momentary wellbeing during specific interventions. PERMA allows comparisons between a person’s overall wellbeing and their situational wellbeing. For example, when playing a game with a robot and reaching a higher level, a person may experience a sense of Accomplishment. Researchers can best capture this momentary contribution to well-being by measuring the five building blocks of wellbeing. This approach helps them understand how different applications may address individual elements of wellbeing to varying degrees. Moreover, this approach provides insights on where applications have potential for optimization. To illustrate, if an application scores high on engagement but low on positive emotions, integrating touch from the robot could enhance the emotional experience (Sawabe et al., 2022).
Further support for applying the PERMA framework in the context of social robots can be found in the reviews by Kachouie et al. (Kachouie et al., 2014; Kachouie et al., 2017), who categorized a range of wellbeing outcomes, such as reduced loneliness and depression, within the dimensions of PERMA. More recently, a PERMA-based wellbeing intervention for college students significantly improved emotion regulation and had a positive impact on mood (Laban et al., 2025). These findings highlight the potential of PERMA as a valuable foundation for designing social robot applications aimed at promoting wellbeing.
3 Conceptual model
Having established the theoretical foundation, we now introduce our conceptual model. Our goal is to support designers and researchers in developing robotic applications for older adults by proposing which types of applications are particularly relevant and how they should be designed. The model is structured around two central guiding questions: What? and How? Before elaborating on the model in detail, we provide a graphical overview in Figure 1.
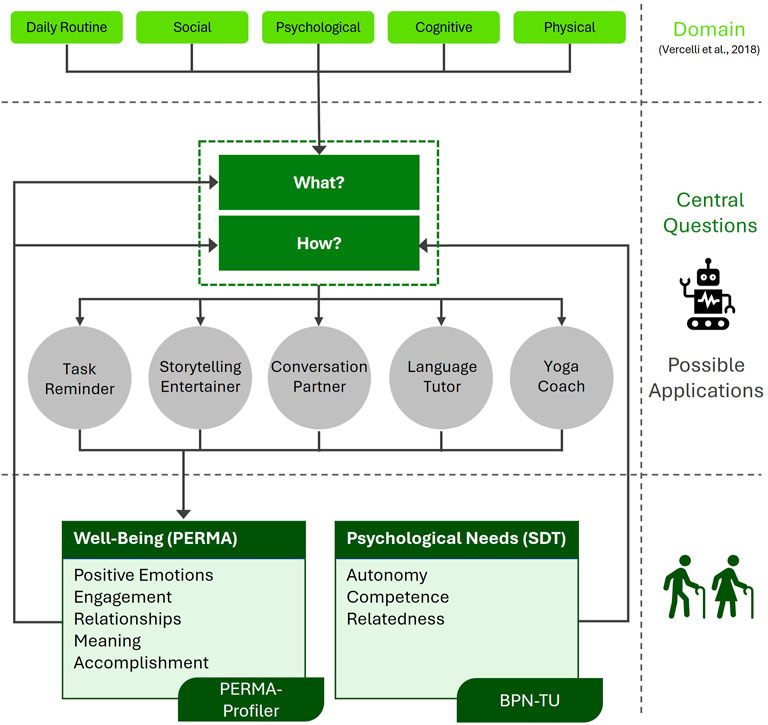
Figure 1. Conceptual model for designing social robot applications in senior care, integrating Self-Determination Theory and the PERMA model.
3.1 What to design?
Current companion robots tend to focus on specific domains (Zhao et al., 2023). To address the question of What? social robots should support, researchers should consider the domain in which their application is rooted to meaningfully benefit older adults. Therefore, we aim to identify key areas where social robots can be effectively integrated into senior care. Bemelmans et al. (Bemelmans et al., 2011) highlighted the potential of social robots at the social, psychological, and physiological levels. While these areas are highly relevant, we argue that additional domains, such as cognitive training (Lim, 2023) or medication reminders (Prakash et al., 2013) require separate consideration. Therefore, we base our conceptual model on the five domains identified by Vercelli et al. (Vercelli et al., 2018) in their comprehensive review: Daily Activities, Social, Psychological, Cognitive, and Physical. We slightly adapt the first category, renaming it to Daily Routine to better reflect the supportive role of social robots in task structuring and reminders, rather than in the direct execution of tasks. In Table 1, we provide examples of existing work and offer an outlook on potential future applications.
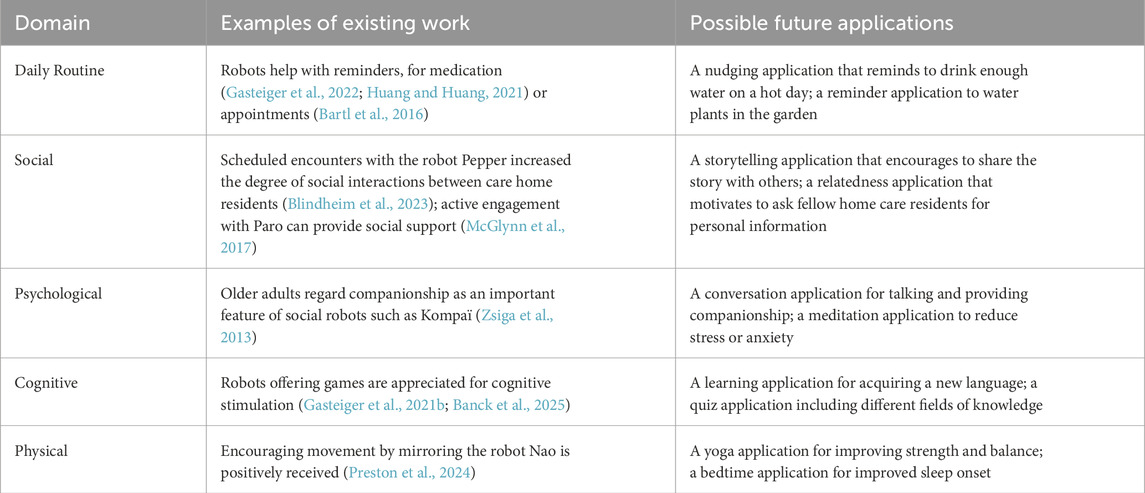
Table 1. Examples of existing work and possible future applications in selected domains.
The PERMA dimensions inform both the What? and the How? in our model. We begin by focusing on how PERMA guides the What?. While new applications can be derived by examining key domains for robotic intervention as explained above, they may also emerge from the building blocks of wellbeing themselves. For example, a researcher might concentrate on the wellbeing dimension Accomplishment, aiming to create an intervention that fosters a sense of achievement. This could lead to a robot that proposes daily challenges, such as exercising on Monday, journaling on Tuesday, and calling one’s grandchildren on Wednesday. By completing these tasks, seniors may experience an enhanced sense of Accomplishment. The resulting application then spans multiple domains, as its basis for idea generation lies in a specific wellbeing dimension rather than a domain-driven starting point.
3.2 How to design?
Having addressed how PERMA can guide the generation of application ideas, we now turn to the How?, by illustrating how the dimensions of wellbeing can serve as guiding principles for application design. For instance, a reminder application within the domain of Daily Routine may encourage older adults to regularly open their windows for fresh air. Rather than issuing a directive, the application can be designed in line with the PERMA-dimension Meaning by framing the action as an act of caregiving. The robot might say, ‘I need some fresh air - could you please open the window for me?’. By responding to this request, older adults are not merely completing a task but may experience a heightened sense of meaning through caring for the robot.
Additionally, SDT also informs the How? aspect of application design, particularly by emphasizing the fulfillment of the three basic psychological needs: autonomy, competence, and relatedness. These needs serve as key design principles, as their satisfaction contributes to wellbeing. Autonomy can best be supported by offering choices. For example, in a storytelling application, the robot could enhance autonomy by enabling older adults to influence the progression of the narrative through interactive decision-making. Competence may be fostered by integrating small riddles into the story, accompanied by positive reinforcement for correct answers and supportive hints when needed. Relatedness can be addressed by having the robot use the listener’s name and encouraging them to share the storytelling experience with friends or family.
3.3 Measuring the effects
To ensure that applications developed using our conceptual model can be tested in the field, standardized and consistent measures for evaluating the interactions are essential. These allow for the comparison of effects across different application types and domains. We therefore propose the use of two validated instruments to assess both wellbeing and the satisfaction of basic psychological needs.
General wellbeing should be measured before the interaction using the PERMA-Profiler (Butler and Kern, 2016). To assess the impact of the interaction itself, we suggest adapting the PERMA-Profiler to capture situational wellbeing. For example, the item “In general, how often do you feel joyful?” can be modified to “How often did you feel joyful during the game with the robot?”. This enables researchers to directly compare baseline and situational wellbeing and identify which dimensions of wellbeing are effectively supported. In cases of low outcomes in specific dimensions, the design can be refined to better target these building blocks of wellbeing. If interactions consistently score high across all PERMA dimensions, on-going interaction with the robot could help maintain or even improve long-term wellbeing in seniors.
In addition to assessing wellbeing, it is also important to evaluate how effectively different applications support the basic psychological needs defined by SDT. While some applications may naturally support specific needs more than others, a consistent evaluation across all three is desirable. For this purpose, we recommend the Basic Psychological Needs Scale for Technology Use (BPN-TU), available in both German and English. This instrument has been specifically developed to measure need satisfaction in human-technology interactions and has been validated involving the social robot Pepper as a rehabilitation tool. Notably, the BPN-TU not only captures relatedness to other people but also to the robot itself (Moradbakhti et al., 2024), making it especially suitable for evaluating social robot applications.
Together, the (adapted) PERMA-Profiler and the BPN-TU provide standardized, comparable metrics across diverse interventions. They support systematic field testing and enable researchers to assess the effectiveness of different applications while identifying areas for improvement.
4 Future work
Given the growing shortage of care workers, the development of meaningful social robot interventions for seniors is becoming increasingly vital. In our future work, we aim to iteratively design at least one application per domain, guided by the principles of our proposed conceptual model. This includes integrating both the PERMA framework and Self-Determination Theory into the design process and evaluating each application using the corresponding validated measures. By doing so, we also intend to test the model’s practical applicability and enhance the comparability of different social robot interventions, ideally extending to applications developed by others. Eventually, our goal is to further establish the model as a standard for designing and evaluating social robot applications in senior care that explicitly aim to promote wellbeing.
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
CK: Visualization, Writing – review and editing, Conceptualization, Writing – original draft, Methodology. BL: Funding acquisition, Writing – review and editing, Project administration, Conceptualization, Methodology, Supervision.
Funding
The author(s) declare that financial support was received for the research and/or publication of this article. This work was conducted within the KIdT project supported by the European Social Fund Plus (ESF+) under Grant 1-2-230972.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Generative AI statement
The author(s) declare that Gen AI was used in the creation of this manuscript. AI was only used for language and style editing, not for creating content.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abdi, J., Al-Hindawi, A., Ng, T., and Vizcaychipi, M. P. (2018). Scoping review on the use of socially assistive robot technology in elderly care. BMJ Open 8, e018815. doi:10.1136/bmjopen-2017-018815
Andtfolk, M., Nyholm, L., Eide, H., and Fagerström, L. (2022). Humanoid robots in the care of older persons: a scoping review. Assistive Technol. official J. RESNA 34, 518–526. doi:10.1080/10400435.2021.1880493
Antonioni, E., Bisconti, P., Massa, N., Nardi, D., and Suriani, V. (2021). “Questioning Items’ Link in Users’ perception of a training robot for elders,” in Social robotics. H. Li, S. S. Ge, Y. Wu, A. Wykowska, H. He, X. Liuet al. (Cham: Springer International Publishing), 509–518.
Banck, M., Ganal, E., Weichert, H.-F., Puppe, F., and Lugrin, B. (2025). “An AI-Driven card playing robot: an empirical study on communicative style and embodiment with elderly adults,” in Proceedings of the 24th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2025) (Detroit, MI, United States: IFAAMAS), 223–232.
Bangerter, L. R., Heid, A. R., Abbott, K., and van Haitsma, K. (2017). Honoring the everyday preferences of nursing home residents: perceived choice and satisfaction with care. Gerontologist 57, 479–486. doi:10.1093/geront/gnv697
Bartl, A., Bosch, S., Brandt, M., Dittrich, M., and Lugrin, B. (2016). “The influence of a social robot’s persona on how it is perceived and accepted by elderly users,” in Social robotics. Editors A. Agah, J.-J. Cabibihan, A. M. Howard, M. A. Salichs, and H. He (Cham: Springer International Publishing), 681–691.
Bemelmans, R., Gelderblom, G. J., Jonker, P., and Witte, L. de (2011). “The potential of socially assistive robotics in care for elderly, a systematic review,” in Human-robot personal relationships. Editors M. H. Lamers, and F. J. Verbeek (Berlin, Heidelberg: Springer Berlin Heidelberg), 83–89.
Bemelmans, R., Gelderblom, G. J., Jonker, P., and Witte, L. de (2012). Socially assistive robots in elderly care: a systematic review into effects and effectiveness. J. Am. Med. Dir. Assoc. 13, 114–120.e1. doi:10.1016/j.jamda.2010.10.002
Blindheim, K., Solberg, M., Hameed, I. A., and Alnes, R. E. (2023). Promoting activity in long-term care facilities with the social robot pepper: a pilot study. Inf. Health Soc. Care 48, 181–195. doi:10.1080/17538157.2022.2086465
Breazeal, C., Dautenhahn, K., and Kanda, T. (2016). “Social robotics,” in Springer handbook of robotics. Editors B. Siciliano, and O. Khatib (Cham: Springer International Publishing), 1935–1972.
Broekens, J., Heerink, M., and Rosendal, H. (2009). Assistive social robots in elderly care: a review. Gerontechnology 23, 94–103. doi:10.4017/gt.2009.08.02.002.00
Butler, J., and Kern, M. L. (2016). The PERMA-Profiler: a brief multidimensional measure of flourishing. Intnl. J. Wellbeing 6, 1–48. doi:10.5502/ijw.v6i3.526
Carolis, B. de, Carofiglio, V., Grimandli, I., Macchiarulo, N., Palestra, G., and Pino, O. (2020). “Using the pepper robot in cognitive stimulation therapy for people with mild cognitive impairment and mild dementia,” in Achi 2020: the thirteenth international conference on advances in computer-human interaction. Editors J. Lloret Mauri, D. Saplacan, K. Çarçani, P. Oky Dicky Ardiansyah, and S. Vasilache (Valencia, Spain), 452–457.
Custers, A. F., Westerhof, G. J., Kuin, Y., Gerritsen, D. L., and Riksen-Walraven, J. M. (2012). Relatedness, autonomy, and competence in the caring relationship: the perspective of nursing home residents. J. Aging Stud. 26, 319–326. doi:10.1016/j.jaging.2012.02.005
Deci, E. L., and Ryan, R. M. (1985). Intrinsic motivation and self-determination in human behavior. Boston, MA: Springer US.
Deci, E. L., and Ryan, R. M. (2000). The “What” and “Why” of goal pursuits: human needs and the self-determination of behavior. Psychol. Inq. 11, 227–268. doi:10.1207/S15327965PLI1104_01
Deublein, A., and Lugrin, B. (2020). “(expressive) social robot or tablet? – on the benefits of embodiment and non-verbal expressivity of the interface for a smart environment,” in Persuasive technology. Designing for future change. Editors S. B. Gram-Hansen, T. S. Jonasen, and C. Midden (Cham: Springer International Publishing), 85–97.
Diener, E. (1984). Subjective well-being. Psychol. Bull. 95, 542–575. doi:10.1037/0033-2909.95.3.542
Diener, E., Emmons, R. A., Larsen, R. J., and Griffin, S. (1985). The satisfaction with life scale. J. Pers. Assess. 49, 71–75. doi:10.1207/s15327752jpa4901_13
Diener, E., Oishi, S., and Lucas, R. E. (2009). “Subjective well-being: the science of happiness and life satisfaction,” in The Oxford handbook of positive psychology. Editors S. J. Lopez, C. R. Snyder, E. Diener, S. Oishi, and R. E. Lucas (Oxford University Press), 186–194.
Duncan, J. M., Killian, T. S., and Lucier-Greer, M. (2017). Leisure, relatedness, and ill-being among older adults in long-term care. Activities, Adapt. and Aging 41, 273–290. doi:10.1080/01924788.2017.1326764
Fasola, J., and Mataric, M. (2013). A socially assistive robot exercise coach for the elderly. J. Human-Robot Interact. 2. doi:10.5898/JHRI.2.2.Fasola
Ferrand, C., Martinent, G., and Durmaz, N. (2014). Psychological need satisfaction and well-being in adults aged 80 years and older living in residential homes: using a self-determination theory perspective. J. Aging Stud. 30, 104–111. doi:10.1016/j.jaging.2014.04.004
Gasteiger, N., Loveys, K., Law, M., and Broadbent, E. (2021a). Friends from the future: a scoping review of research into robots and computer agents to combat loneliness in older people. Clin. Interv. Aging 16, 941–971. doi:10.2147/cia.s282709
Gasteiger, N., Ahn, H. S., Gasteiger, C., Lee, C., Lim, J., Fok, C., et al. (2021b). Robot-delivered cognitive stimulation games for older adults. J. Hum.-Robot Interact. 10, 1–18. doi:10.1145/3451882
Gasteiger, N., Ahn, H. S., Fok, C., Lim, J., Lee, C., Macdonald, B. A., et al. (2022). Older adults' experiences and perceptions of living with bomy, an assistive dailycare robot: a qualitative study. Assist. Technol. 34, 487–497. doi:10.1080/10400435.2021.1877210
Ge, G. L., and Schleimer, S. C. (2023). Robotic technologies and well-being for older adults living at home. JSM 37, 340–350. doi:10.1108/JSM-03-2022-0076
Góngora Alonso, S., Hamrioui, S., La Torre Díez, I. de, Motta Cruz, E., López-Coronado, M., and Franco, M. (2019). Social robots for people with aging and dementia: a systematic review of literature. Telemed. J. E Health 25, 533–540. doi:10.1089/tmj.2018.0051
Goodman, F. R., Disabato, D. J., Kashdan, T. B., and Kauffman, S. B. (2018). Measuring well-being: a comparison of subjective well-being and PERMA. J. Posit. Psychol. 13, 321–332. doi:10.1080/17439760.2017.1388434
Hammer, S., Lugrin, B., Bogomolov, S., Janowski, K., and André, E. (2016). “Investigating politeness strategies and their persuasiveness for a robotic elderly assistant,” in Persuasive technology. Editors A. Meschtscherjakov, B. de Ruyter, V. Fuchsberger, M. Murer, and M. Tscheligi (Cham: Springer International Publishing), 315–326.
Huang, T., and Huang, C. (2021). Attitudes of the elderly living independently towards the use of robots to assist with activities of daily living. Work 69, 55–65. doi:10.3233/WOR-205166
Ice, G. H. (2002). Daily life in a nursing home. J. Aging Stud. 16, 345–359. doi:10.1016/S0890-4065(02)00069-5
Janssen, S., and Schadenberg, B. R. (2024). A psychological need-fulfillment perspective for designing social robots that support well-being. Int J Soc Robotics 16, 857–878. doi:10.1007/s12369-024-01102-8
Jeong, S., Alghowinem, S., Aymerich-Franch, L., Arias, K., Lapedriza, A., Picard, R., et al. (2020). “A robotic positive psychology coach to improve college students’ wellbeing,” in Robots with heart, mind, and soul: the 29th IEEE international conference on robot and human interactive communication 31 August-04 September 2020 Editors F. Ferland, and D. Morocco (Piscataway, NJ: IEEE), 187–194.
Kachouie, R., Sedighadeli, S., Khosla, R., and Chu, M.-T. (2014). Socially assistive robots in elderly care: a mixed-method systematic literature review. Int. J. Human-Computer Interact. 30, 369–393. doi:10.1080/10447318.2013.873278
Kachouie, R., Sedighadeli, S., and Abkenar, A. B. (2017). “The role of socially assistive robots in elderly wellbeing: a systematic review,” in Cross-cultural design. Editor P.-L. P. Rau (Cham: Springer International Publishing), 669–682.
D. Kahneman (1999). Well-being: the foundations of Hedonic psychology (New York: Russell Sage Foundation), 593.
Kercher, K. (1992). Assessing subjective well-being in the old-old. Res. Aging 14, 131–168. doi:10.1177/0164027592142001
Khosla, R., Chu, M.-T., and Nguyen, K. (2013). “Enhancing emotional well being of elderly using assistive social robots in Australia,” in 2013 international conference on biometrics and kansei engineering (Tokyo, Japan: IEEE), 41–46.
Kok, R. de, Rothweiler, J., Scholten, L., van Zoest, M., Boumans, R., and Neerincx, M. (2018). “Combining social robotics and music as a non-medical treatment for people with dementia,” in 2018 27th IEEE international symposium on robot and human interactive communication (RO-MAN) (Nanjing: IEEE), 465–467.
Laban, G., Wang, J., and Gunes, H. (2025). A robot-led intervention for emotion regulation: from expression to reappraisal. arXiv. doi:10.48550/arXiv.2503.18243
Lee, O. E., and Shin, H. (2024). Social workers' perspectives on socially isolated older adults living with a robot companion. J. Gerontol. Soc. Work 67, 621–638. doi:10.1080/01634372.2024.2339974
Lim, J. (2023). Effects of a cognitive-based intervention program using social robot PIO on cognitive function, depression, loneliness, and quality of life of older adults living alone. Front. Public Health 11, 1097485. doi:10.3389/fpubh.2023.1097485
Liu, L., Wang, D., Wu, W., Xiang, M., Li, X., Zhao, Y., et al. (2024). Effectiveness of a self-determination theory-based intervention for nursing home residents with depression: a randomized controlled trial. Heliyon 10, e33818. doi:10.1016/j.heliyon.2024.e33818
Lu, Y., Chen, C., Chen, P., and Yu, S. (2023). Designing social robot for adults using self-determination theory and AI technologies. IEEE Trans. Learn. Technol. 16, 206–218. doi:10.1109/TLT.2023.3250465
McGlynn, S. A., Kemple, S., Mitzner, T. L., King, C.-H. A., and Rogers, W. A. (2017). Understanding the potential of PARO for healthy older adults. Int. J. Human-Computer Stud. 100, 33–47. doi:10.1016/j.ijhcs.2016.12.004
Moore, A. (2019). “Hedonism,” in The stanford encyclopedia of philosophy. Editors E. N. Zalta, and U. Nodelman (Stanford).
Moradbakhti, L., Leichtmann, B., and Mara, M. (2024). Development and validation of a basic psychological needs scale for technology use. Psychol. Test Adapt. Dev. 5, 26–45. doi:10.1027/2698-1866/a000062
Naseer, F., Nasir Khan, M., Tahir, M., Addas, A., and Kashif, H. (2025). Enhancing elderly care with socially assistive robots: a holistic framework for mobility, interaction, and well-being. IEEE Access 13, 82698–82717. doi:10.1109/ACCESS.2025.3567331
Nichol, B., McCready, J., Erfani, G., Comparcini, D., Simonetti, V., Cicolini, G., et al. (2024). Exploring the impact of socially assistive robots on health and wellbeing across the lifespan: an umbrella review and meta-analysis. Int. J. Nurs. Stud. 153, 104730. doi:10.1016/j.ijnurstu.2024.104730
Papadopoulos, C., Castro, N., Nigath, A., Davidson, R., Faulkes, N., Menicatti, R., et al. (2022). The CARESSES randomised controlled trial: exploring the health-related impact of culturally competent artificial intelligence embedded into socially assistive robots and tested in older adult care homes. Int J Soc Robotics 14, 245–256. doi:10.1007/s12369-021-00781-x
Payoun, M., Fadayevatan, R., Lotfi, M.-S., and Foroughan, M. (2020). Psychometric properties of the Persian version of PERMA-Profiler: a tool to assess flourishing in Iranian older adults. Успехи геронтологии 33, 576–584. doi:10.34922/AE.2020.33.3.021
Peters, D., Calvo, R. A., and Ryan, R. M. (2018). Designing for motivation, engagement and wellbeing in digital experience. Front. Psychol. 9, 797. doi:10.3389/fpsyg.2018.00797
Prakash, A., Beer, J. M., Deyle, T., Smarr, C.-A., Chen, T. L., Mitzner, T. L., et al. (2013). Older adults' medication management in the home: how can robots help? Proc. ACM SIGCHI 2013, 283–290. doi:10.1109/HRI.2013.6483600
Preston, R. C., Shippy, M. R., Aldwin, C. M., and Fitter, N. T. (2024). How can robots facilitate physical, cognitive, and social engagement in skilled nursing facilities? Front. Aging 5, 1463460. doi:10.3389/fragi.2024.1463460
Pu, L., Moyle, W., Jones, C., and Todorovic, M. (2019). The effectiveness of social robots for older adults: a systematic review and meta-analysis of randomized controlled studies. Gerontologist 59, e37–e51. doi:10.1093/geront/gny046
Robinson, H., MacDonald, B., Kerse, N., and Broadbent, E. (2013). The psychosocial effects of a companion robot: a randomized controlled trial. J. Am. Med. Dir. Assoc. 14, 661–667. doi:10.1016/j.jamda.2013.02.007
Robinson, H., MacDonald, B., and Broadbent, E. (2015). Physiological effects of a companion robot on blood pressure of older people in residential care facility: a pilot study. Australas. J. Ageing 34, 27–32. doi:10.1111/ajag.12099
Robinson, N. L., Connolly, J., Hides, L., and Kavanagh, D. J. (2020). Social robots as treatment agents: pilot randomized controlled trial to deliver a behavior change intervention. Internet Interv. 21, 100320. doi:10.1016/j.invent.2020.100320
Ryan, R., and Deci, E. (2002). “An overview of self-determination theory: an organismic dialectical perspective,” in Handbook of self-determination research. Editor E. L. Deci (Rochester, NY: University of Rochester Press), 3–36.
Ryff, C. D., and Keyes, C. L. (1995). The structure of psychological well-being revisited. J. Pers. Soc. Psychol. 69, 719–727. doi:10.1037/0022-3514.69.4.719
Sawabe, T., Honda, S., Sato, W., Ishikura, T., Kanbara, M., Yoshikawa, S., et al. (2022). Robot touch with speech boosts positive emotions. Sci. Rep. 12, 6884. doi:10.1038/s41598-022-10503-6
Schroer, S., Killmann, I., Frank, B., Volker, M., Fiederer, L., Ball, T., et al. (2015). “An autonomous robotic assistant for drinking,” in 2015 IEEE international conference on robotics and automation (ICRA); 2015 may 26-30 (Seattle, WA, USA: IEEE), 6482–6487.
Scoglio, A. A., Reilly, E. D., Gorman, J. A., and Drebing, C. E. (2019). Use of social robots in mental health and well-being research: systematic review. J. Med. Internet Res. 21, e13322. doi:10.2196/13322
Seligman, M. E. (2011). Flourish: A visionary new understanding of happiness and well-being. New York: Free Press, 349.
Spitale, M., and Gunes, H. (2022). “Affective robotics for wellbeing: a scoping review,” in 2022 10th international conference on affective computing and intelligent interaction workshops and demos (ACIIW) (Nara, Japan: IEEE), 1–8.
Statistisches Bundesamt (2024). Bis 2049 werden voraussichtlich mindestens 280 000 zusätzliche pflegekräfte benötigt: Pressemitteilung nr. 033 vom 24. Januar 2024. Wiesbaden.
Tan, C. K., Lou, V. W. Q., Cheng, C. Y. M., He, P. C., and Khoo, V. E. J. (2024). Improving the social well-being of single older adults using the LOVOT social robot: qualitative phenomenological study. JMIR Hum. Factors 11, e56669. doi:10.2196/56669
Trainum, K., Tunis, R., Xie, B., and Hauser, E. (2023). Robots in assisted living facilities: scoping review. JMIR Aging 6, e42652. doi:10.2196/42652
Valentí, S. M., Agüera-Ortiz, L., Olazarán Rodríguez, J., Mendoza Rebolledo, C., Pérez Muñoz, A., Rodríguez Pérez, I., et al. (2015). Social robots in advanced dementia. Front. Aging Neurosci. 7, 133. doi:10.3389/fnagi.2015.00133
van Minkelen, P., Gruson, C., van Hees, P., Willems, M., Wit, J. de, Aarts, R., et al. (2020). “Using self-determination theory in social robots to increase motivation in L2 word learning,” in Proceedings of the 2020 ACM/IEEE international conference on human-robot interaction; 23 03 2020 26 03 2020. Editors T. Belpaeme, J. Young, H. Gunes, and L. Riek (New York, NY, USA: ACM), 369–377.
Vercelli, A., Rainero, I., Ciferri, L., Boido, M., and Pirri, F. (2018). Robots in elderly care. DigitCult - Sci. J. Digital Cult. 2, 37–50. doi:10.4399/97888255088954
Vogan, A. A., Alnajjar, F., Gochoo, M., and Khalid, S. (2020). Robots, AI, and cognitive training in an era of mass age-related cognitive decline: a systematic review. IEEE Access 8, 18284–18304. doi:10.1109/ACCESS.2020.2966819
Wada, K., Shibata, T., Saito, T., and Tanie, K. (2002). “Effects of robot assisted activity for elderly people at day service center and analysis of its factors,” in Proceedings of the 4th world congress on intelligent control and automation (cat. No.02EX527) (Shanghai, China: IEEE), 1301–1305.
Wammerl, M., Jaunig, J., Mairunteregger, T., and Streit, P. (2019). The German version of the PERMA-Profiler: evidence for construct and convergent validity of the PERMA theory of well-being in German speaking countries. J. well-being Assess. 3, 75–96. doi:10.1007/s41543-019-00021-0
Waterman, A. S. (1993). Two conceptions of happiness: contrasts of personal expressiveness (Eudaimonia) and Hedonic enjoyment. J. Pers. Soc. Psychol. 64, 678–691. doi:10.1037/0022-3514.64.4.678
Watson, D., Clark, L. A., and Tellegen, A. (1988). Development and validation of brief measures of positive and negative affect: the PANAS scales. J. Pers. Soc. Psychol. 54, 1063–1070. doi:10.1037//0022-3514.54.6.1063
Willems, A. S., and Lewalter, D. (2012). “Self-determination and learning,” in Encyclopedia of the sciences of learning. Editor N. M. Seel (Boston, MA: Springer US), 2993–2997.
Wilson, J., Lee, N., Saechao, A., and Scheutz, M. (2016). “Autonomy and dignity: principles in designing effective social robots to assist in the care of older adults,” in Workshop proceedings: using social robots to improve the quality of life in the elderly (ICSR'16).
Wu, Y.-H., Wrobel, J., Cornuet, M., Kerhervé, H., Damnée, S., and Rigaud, A.-S. (2014). Acceptance of an assistive robot in older adults: a mixed-method study of human–robot interaction over a 1-month period in the living lab setting. Clin. Interv. Aging 9, 801–811. doi:10.2147/CIA.S56435
Yen, H.-Y., Huang, C. W., Chiu, H.-L., and Jin, G. (2024). The effect of social robots on depression and loneliness for older residents in long-term care facilities: a meta-analysis of randomized controlled trials. J. Am. Med. Dir. Assoc. 25, 104979. doi:10.1016/j.jamda.2024.02.017
Zhao, D., Wang, W., Okonkwo, M. C., Yang, Z., Yang, J., and Liu, H. (2022). A safe and compliant noncontact interactive approach for wheeled walking aid robot. Comput. Intell. Neurosci. 2022, 1–20. doi:10.1155/2022/3033920
Zhao, D., Sun, X., Shan, B., Yang, Z., Yang, J., Liu, H., et al. (2023). Research status of elderly-care robots and safe human-robot interaction methods. Front. Neurosci. 17, 1291682. doi:10.3389/fnins.2023.1291682
Zsiga, K., Edelmayer, G., Rumeau, P., Péter, O., Tóth, A., and Fazekas, G. (2013). Home care robot for socially supporting the elderly: focus group studies in three European countries to screen user attitudes and requirements. Int. J. rehabilitation Res. 36, 375–378. doi:10.1097/MRR.0b013e3283643d26
Keywords: social robots, PERMA, self-determination theory, basic psychological needs, elderly, seniors, application design, measurement
Citation: Klier C and Lugrin B (2025) Designing for flourishing: a conceptual model for enhancing older adults’ well-being with social robots. Front. Robot. AI 12:1607373. doi: 10.3389/frobt.2025.1607373
Received: 07 April 2025; Accepted: 31 July 2025;
Published: 20 August 2025.
Edited by:
Cedomir Stanojevic, Indiana University, United StatesReviewed by:
Kerstin Fischer, University of Southern Denmark, DenmarkCopyright © 2025 Klier and Lugrin. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Chantal Klier, Y2hhbnRhbC5rbGllckB1bmktd3VlcnpidXJnLmRl