Abstract
Introduction:
Animal-involved scenarios pose significant challenges for autonomous driving systems due to their rarity, unpredictability, and safety-critical nature. Despite their importance, existing vision-language datasets for autonomous driving largely overlook these long-tail situations.
Methods:
To address this gap, we introduce AniDriveQA, a novel visual question answering (VQA) dataset specifically designed to evaluate vision-language models (VLMs) in driving scenarios involving animals. The dataset is constructed through a scalable pipeline that collects diverse animal-related traffic scenes from internet videos, filters and annotates them using object detection and scene classification models, and generates multi-task VQA labels with a large vision-language model. AniDriveQA includes three key task types: scene description, animal description, and driving suggestion.
Results:
For evaluation, a hybrid scheme was employed that combined classification accuracy for structured tasks with LLM-based scoring for open-ended responses. Extensive experiments on various open-source VLMs revealed large performance disparities across models and task types.
Discussion:
The experimental results demonstrate that AniDriveQA effectively exposes the limitations of current VLMs in rare yet safety-critical autonomous driving scenarios. The dataset provides a valuable diagnostic benchmark for advancing reasoning, perception, and decision-making capabilities in future vision-language models.
1 Introduction
The automotive sector is continuously evolving as manufacturers face pressure to enhance safety, adopt sustainable practices and improve design efficiency (Martínez-Hinojosa et al., 2025). Driven by these challenging requirements, automotive manufacturers are increasingly adopting advanced perception and decision-making systems to support drivers and enable autonomous driving (Toropov et al., 2023). Ensuring the safety and reliability of autonomous driving systems requires robust perception and reasoning capabilities, especially in complex and long-tail scenarios. Among these, driving scenes involving the sudden appearance of animals represent a critical yet underexplored challenge. Animals on or near roadways can cause severe traffic disruptions, accidents, and fatalities. In the United States, approximately 1–2 million collisions between vehicles and large animals occur each year, resulting in significant property damage and human casualties (Donaldson, 2017). The presence of animals poses a serious threat to driving safety. Despite advances in object detection and motion planning, current perception and decision-making systems still struggle to generalize to such rare yet safety-critical events, often due to limited training data and insufficient context-aware reasoning.
Recent advancements in large-scale vision-language models (VLMs) have demonstrated promising generalization abilities across diverse visual scenes. These models leverage extensive knowledge bases and strong reasoning capabilities to interpret complex environments. In the context of autonomous driving, VLMs offer the potential to understand not only what is present in a scene but also to reason about behaviors, predict consequences, and suggest appropriate actions. Their ability to perform zero-shot inference and generate structured outputs makes them particularly suitable for addressing long-tail scenarios involving rare or unexpected entities such as animals.
However, as illustrated in Figure 1, animal-involved driving scenarios represent a typical long-tail phenomenon, where such events occur infrequently in driving data. In these safety-critical cases, existing VLMs may still struggle with scene misinterpretation, incorrect behavior analysis, or unsafe recommendations. Figure 1 provides an example where the LLaVA v1.5-7B model fails to accurately recognize the animal and misjudges the potential driving risk, highlighting the need for dedicated datasets targeting such rare yet impactful scenarios.
FIGURE 1

Vision-language model failure in understanding animal-involved driving scenarios.
Despite the capabilities of VLMs, current datasets for vision-language understanding in autonomous driving primarily focus on general objects, road infrastructure, and human behavior. Datasets such as NuScenes-QA Qian et al. (2024), NuScenes-MQA Inoue et al. (2024), MAPLM-QA Cao et al. (2024), DriveLM-nuScenes Sima et al. (2024), and CODA-LM Chen K. et al. (2025) cover diverse driving scenarios but largely overlook the presence of animals and the reasoning required for safe interaction. For example, CODA-LM contains fewer than 500 images involving animals, making it insufficient for systematic evaluation of animal-related reasoning. This lack of targeted evaluation data limits the ability to assess and enhance model performance in animal-involved driving situations, thereby hindering their deployment in real-world safety-critical conditions.
To bridge this gap, this paper proposed AniDriveQA, a visual question answering (VQA) dataset specifically focused on driving scenarios where animals appear. This paper collected image data from various internet sources and leveraged the capabilities of large vision-language models to generate high-quality question-answer pairs covering key reasoning aspects, including animal detection, behavior recognition, impact analysis, and driving suggestions. The dataset enabled systematic evaluation of VLMs in rare and safety-critical contexts, promoting the development of more robust autonomous driving systems. The main contributions are summarized as follows:
this paper collected a diverse set of animal-involved driving images and video clips from internet sources, capturing a wide range of species, traffic scenarios, and environmental conditions.
this paper designed a multi-level visual question answering task suite targeting scene understanding, animal detection, behavior recognition, impact analysis, and driving suggestions.
this paper constructed the AniDriveQA dataset using large vision-language models for automated question-answer generation.
2 Materials and methods
2.1 Related works
2.1.1 Autonomous driving datasets
Traditional autonomous driving datasets, such as KITTI Geiger et al. (2013), nuScenes Caesar et al. (2020), Waymo Open Dataset Sun et al. (2020), Cityscapes Cordts et al. (2016), ApolloScape Huang et al. (2018), BDD100K Yu et al. (2020), and Argoverse Chang et al. (2019), primarily focus on visual perception and scene understanding tasks. These datasets provide multimodal sensor data but lack the textual annotations necessary for evaluating higher-level reasoning and decision-making capabilities.
With the emergence of large language models, several datasets have been proposed to introduce linguistic information into autonomous driving. In real-world settings, datasets such as BDD-X Kim et al. (2018), BDD-OIA Xu et al. (2020), Talk2Car Deruyttere et al. (2019), and NuPrompt Wu et al. (2025) extend existing large-scale driving datasets by adding action explanations, natural language commands, and scene descriptions to support reasoning and planning tasks. In simulation environments, CARLA-NAV Jain et al. (2023), Driving-LLM Chen et al. (2024), LaMPilot Ma et al. (2024), and LangAuto Shao et al. (2024) leverage simulators such as CARLA and HighwayEnv to construct datasets combining language instructions with navigation, decision-making, and closed-loop control tasks. Compared to traditional datasets that primarily focus on perception and low-level control, these language-augmented datasets enable a deeper integration of perception, reasoning, and decision-making, offering new opportunities for building explainable and interactive autonomous driving systems. While existing datasets have advanced multi-modal autonomous driving research, they largely overlook rare but safety-critical events involving animals.
2.1.2 VQA tasks in autonomous driving
VQA tasks have become critical components in autonomous driving research, enabling systems to integrate visual perception with natural language reasoning to better interpret complex environments and support decision-making. Existing datasets have designed VQA tasks across multiple dimensions, including perception and scene understanding, sequential reasoning, and high-level decision support. For example, NuScenes-QA Qian et al. (2024) and MAPLM-QA Cao et al. (2024) focus on perception-oriented tasks such as object existence, counting, and spatial relationship recognition. NuScenesMQA Inoue et al. (2024) enhances answer quality by providing responses in fully structured sentences, thereby offering a richer semantic hierarchy. DriveLM Sima et al. (2024) extends VQA to sequential reasoning by modeling the connections between perception, trajectory prediction, and planning. CODA-LM Chen K. et al. (2025) targets decision-oriented reasoning through hierarchical tasks involving scene analysis, regional risk assessment, and driving suggestion generation. Furthermore, datasets like SUTD-TrafficQA Xu et al. (2021), DrivingVQA Corbière et al. (2025), DriveBench Xie et al. (2025), Rank2Tell Sachdeva et al. (2024) and LingoQA Marcu et al. (2024) explore higher-order reasoning tasks such as event forecasting, causal explanation, counterfactual inference, and driver attention modeling. NuScenes-SpatialQA Tian et al. (2025) is designed for both spatial understanding and spatial reasoning in autonomous driving. In addition, STRIDE-QA Ishihara et al. (2025) defines object-centric spatial, ego-centric spatial, and ego-centric spatiotemporal QA tasks to support fine-grained, predictive reasoning in complex traffic scenarios. AutoTrust Xing et al. (2024) focuses on the influence of trustworthiness factors, such as safety, privacy, and robustness, on the operational performance and reliability of autonomous driving systems across diverse driving scenarios. While these efforts significantly advance multimodal reasoning in autonomous driving, rare yet safety-critical situations–particularly those involving animals–remain largely underexplored.
2.2 Methodology
Animal appearances in driving environments are highly unpredictable, making it costly and inefficient to capture such data through real-world collection. Inspired by the pretraining strategies of large language models, this paper explored internet video platforms as a rich source for animal-involved driving scenes, offering diverse species, lighting conditions, and geographic contexts. This research was conducted at Institute of Computing Technologies, China Academy of Railway Sciences Corporation Ltd., Beijing, China.
This paper manually collected videos from Bilibili and YouTube via keyword search and verified them before batch downloading with yt-dlpyt-dlp Contributors, (2021). Frames were extracted at fixed intervals to build an initial pool. A multi-stage filtering pipeline was then applied: YOLOv5x Jocher (2020) and Grounding DINO Liu S. et al. (2024) detected animals, Places365 Zhou et al. (2017) classified road-related scenes, and CLIP ViT-B/32 Radford et al. (2021) evaluated semantic relevance. Frames passing these stages were manually reviewed for quality assurance.
Based on the alignment between images and textual descriptions, we further filter part of the data to verify whether the image content matches the target semantics. After manual verification, we obtain approximately 12K images that meet the requirements. In addition, during the above data mining process, the results of object detection and scene recognition on the images are stored as pre-annotations, providing references for the subsequent construction of visual question-answering data. The specific video sources and image quantities are summarized in Table 1, while the distributions of animal categories and scenes are shown in Figures 5a,b, respectively.
TABLE 1
| Video platform | Number of videos | Total images | Valid images |
|---|---|---|---|
| Bilibili | 205 | 58,323 | 10,372 |
| YouTube | 31 | 18,796 | 2,448 |
Statistics of data sources.
For annotation, preliminary object and scene information were used as pseudo-labels to assist downstream VQA construction. This paper established a large language model-driven semi-automated validation process with human involvement. The overall data construction process is illustrated in Figure 2.
FIGURE 2
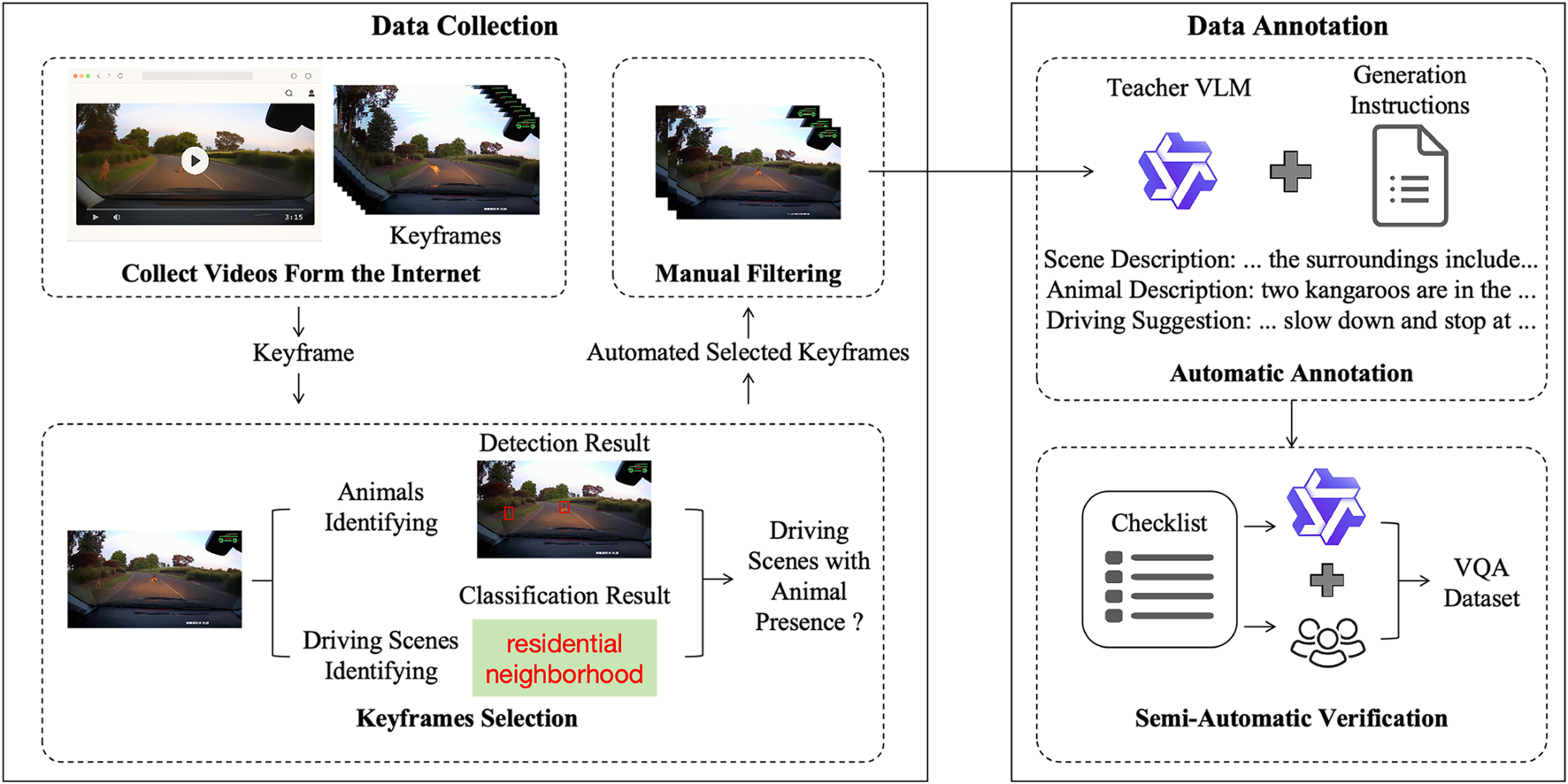
Data construction pipeline.
2.2.1 VQA tasks & metrics
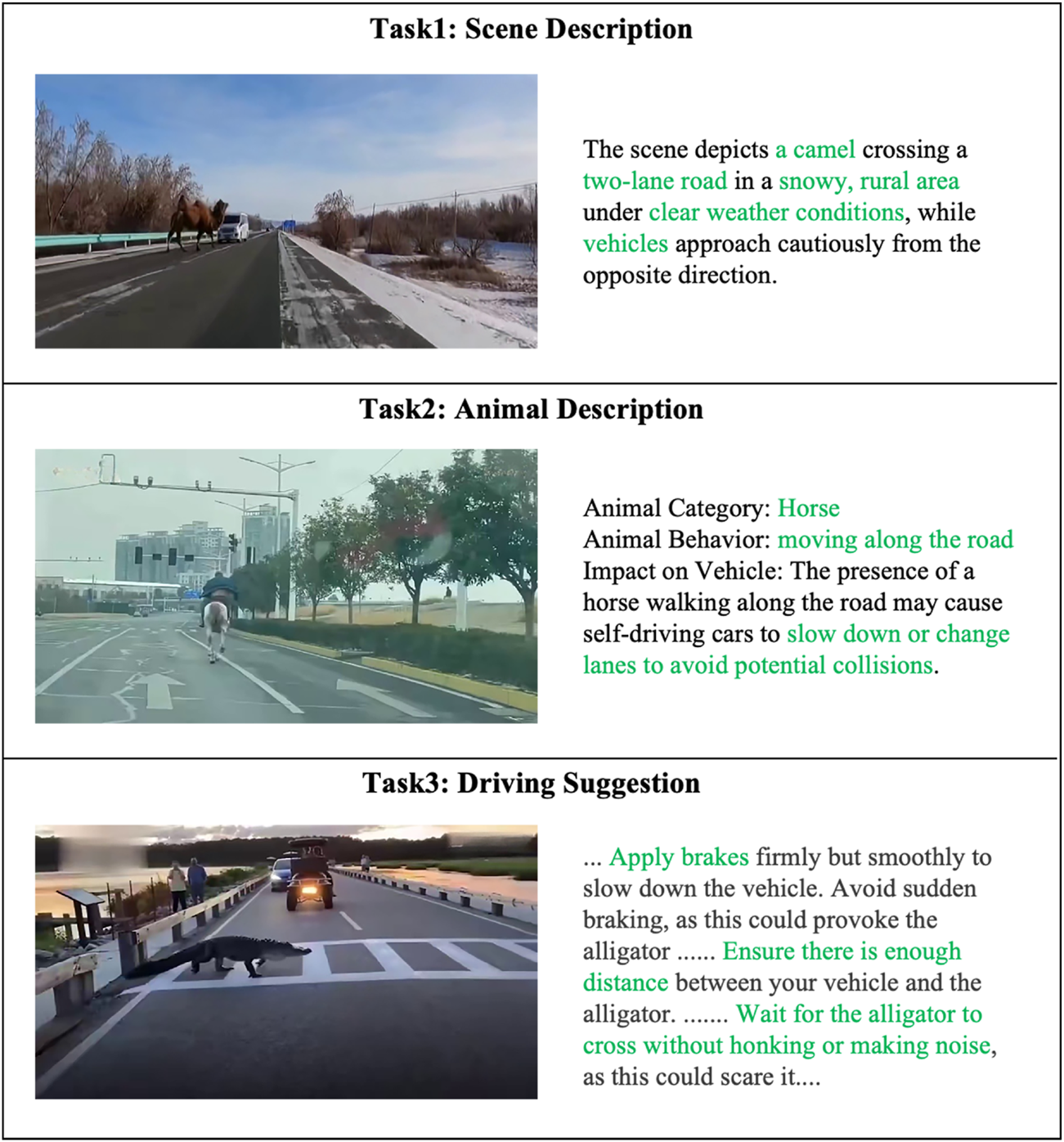
The VQA tasks in AniDriveQA are designed to evaluate vision-language models’ capabilities in scene understanding, animal recognition, and decision-making under complex driving conditions. An overview of the tasks is illustrated in Figure 3.
FIGURE 3
Overview of VQA tasks in AniDriveQA.
2.2.1.1 Scene description task
The scene description task requires models to generate a comprehensive summary of the driving environment, covering elements such as road conditions, weather, scene type, and key participants like vehicles and pedestrians. As illustrated in Task 1 of Figure 3, this task is not limited to identifying common traffic participants but also requires providing detailed descriptions of abnormal or infrequent factors that may pose significant safety risks.
2.2.1.2 Animal description task
The animal description task focuses on identifying the species, describing the behavior (e.g., stationary, crossing the road), and assessing the potential influence of the animal on the ego vehicle’s driving decisions, reflecting the model’s ability to extract fine-grained, behavior-aware information. As illustrated in Task 2 of Figure 3, the presence of a horse moving along the road requires the model to not only detect the animal itself but also reason about the possible consequences for driving safety, such as prompting self-driving cars to slow down or change lanes to avoid potential collisions, highlighting the integration of perception and reasoning in various traffic scenarios.
2.2.1.3 Driving suggestion task
The driving suggestion task evaluates the model’s reasoning ability by requiring it to propose concrete and safety-oriented driving recommendations based on the scene context, particularly considering the animal’s presence and behavior. This task therefore emphasizes the model’s ability to integrate perception with decision-making and to provide actionable guidance in various scenarios. As shown in Task 3 of Figure 3, when an alligator crosses the road, the model should suggest safe actions such as braking smoothly, keeping distance, and waiting quietly until the animal passes.
2.2.1.4 Evaluation metrics
The evaluation of models on AniDriveQA covers both closed-form and open-form VQA tasks, classified based on the nature of their expected responses. Closed-form tasks, including animal species recognition and behavior classification, have a finite set of possible answers and are evaluated using classification accuracy, as defined in Equation 1:where represents the number of samples the model predicted correctly, and represents the total number of samples.
For open-form tasks, including scene description, animal impact analysis, and driving suggestion, model responses are free-form and diverse. Since traditional lexical overlap metrics such as BLEU Papineni et al. (2002) and CIDEr Vedantam et al. (2015) are insufficient to fully capture the semantic quality and reasoning depth of these responses, this paper adopted a large language model (LLM)-based evaluation approach, inspired by recent works (Zheng et al., 2023; Lin and Chen, 2023. Specifically, this paper utilized DeepSeek R1 14B Guo et al. (2025) to conduct prompt-guided evaluations, scoring each response on a 1–10 scale against reference answers and task-specific criteria. Scene description is evaluated based on the accuracy, completeness, and clarity of environmental depiction. Animal impact analysis focuses on the clarity, relevance, and logical soundness of the inferred impact on driving behavior. Driving suggestion assessment considers the reasonableness, safety, contextual adaptability, and clarity of the recommended actions. This hybrid evaluation strategy ensures a comprehensive assessment of both recognition capabilities and complex reasoning abilities critical for safe autonomous driving.
2.2.2 Annotation process
To support the use of AniDriveQA for both training and evaluation, each image depicting an animal-involved driving scenario must be annotated with VQA data aligned to the designed tasks. High-quality annotations are essential for ensuring the accuracy and consistency of model assessment. However, manual annotation is labor-intensive and impractical for large-scale datasets. To address this, this paper developed a multi-step, task-decoupled annotation pipeline, enhanced by a large language model-driven semi-automated validation process, which significantly improves annotation quality and efficiency.
As illustrated in Figure 4, the annotation process begins with object detection to identify entities such as vehicles, pedestrians, animals, and traffic signs. The detection results are stored in structured JSON format and serve as context for guiding the vision-language model Qwen-VL 72B Bai et al. (2023) in generating task-specific answers. Each VQA task is handled independently with tailored prompts: for the scene description task, the model synthesizes a textual summary covering weather, road conditions, and key participants; for the animal description task, it extracts each detected animal, identifies its species, determines its behavior, and analyzes its potential impact on driving decisions; for the driving suggestion task, it reasons over the scene and entities to generate a concise, context-aware recommendation.
FIGURE 4
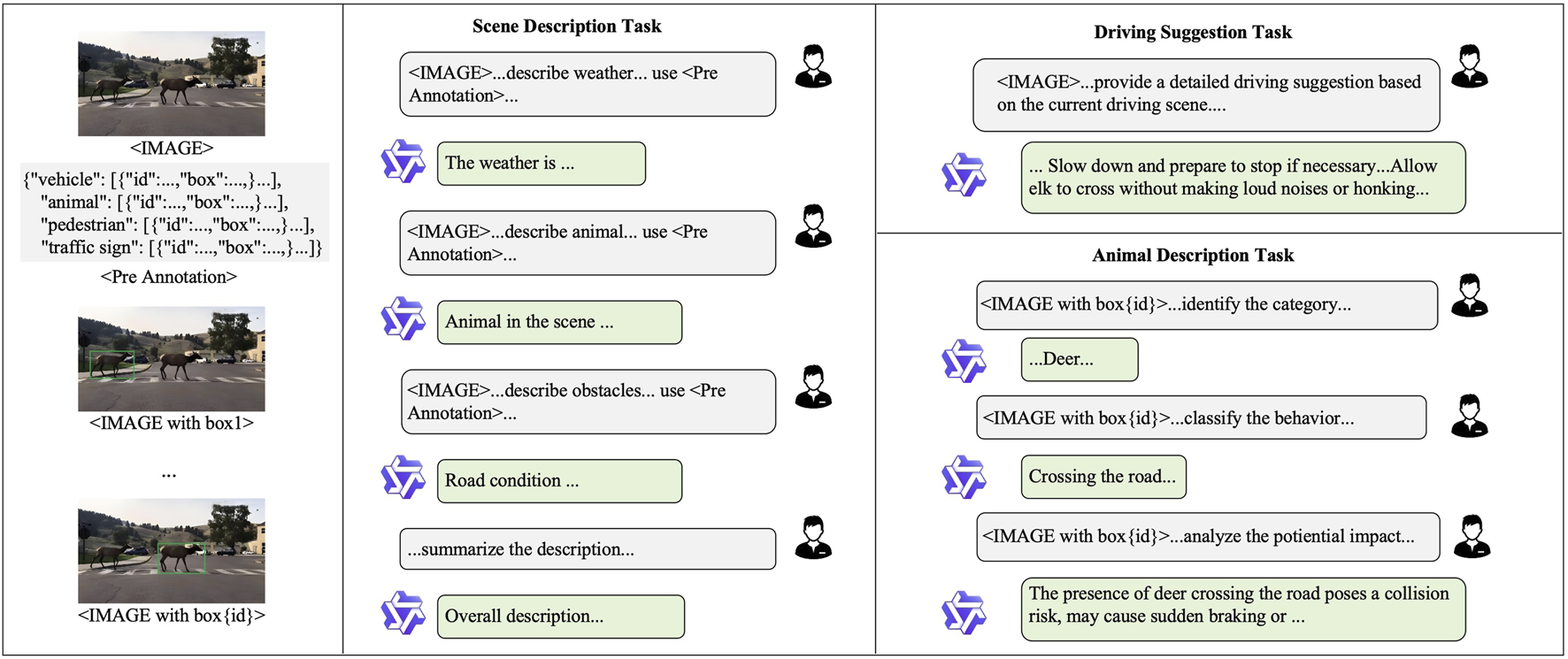
Data annotation pipeline.
All answers are structured into a unified format and undergo a semi-automated validation phase. A large model first inspects the annotations based on a predefined checklist, identifying potential errors and suggesting corrections, which are then reviewed and refined by humans. This hybrid validation strategy balances efficiency with annotation quality, ensuring that the final outputs serve as reliable supervision signals for model training and evaluation.
2.2.3 Statistics
The AniDriveQA dataset contains a total of 12,820 samples. To facilitate both evaluation and finetuning, this paper splits the AniDriveQA dataset evenly into training and testing sets with a 1:1 ratio. The testing set serves as the benchmark for model evaluation, while the training set is used for adaptation experiments.
To demonstrate the diversity of AniDriveQA, this paper provided a statistical overview of the animal species and driving scene types covered in the dataset. As shown in Figures 5a,b, the dataset includes a broad range of animal categories, from commonly seen species such as dogs and deer to rarer or region-specific animals like moose and elephants. This ensures the inclusion of both frequent and long-tail classes that pose unique challenges to autonomous driving systems.
FIGURE 5
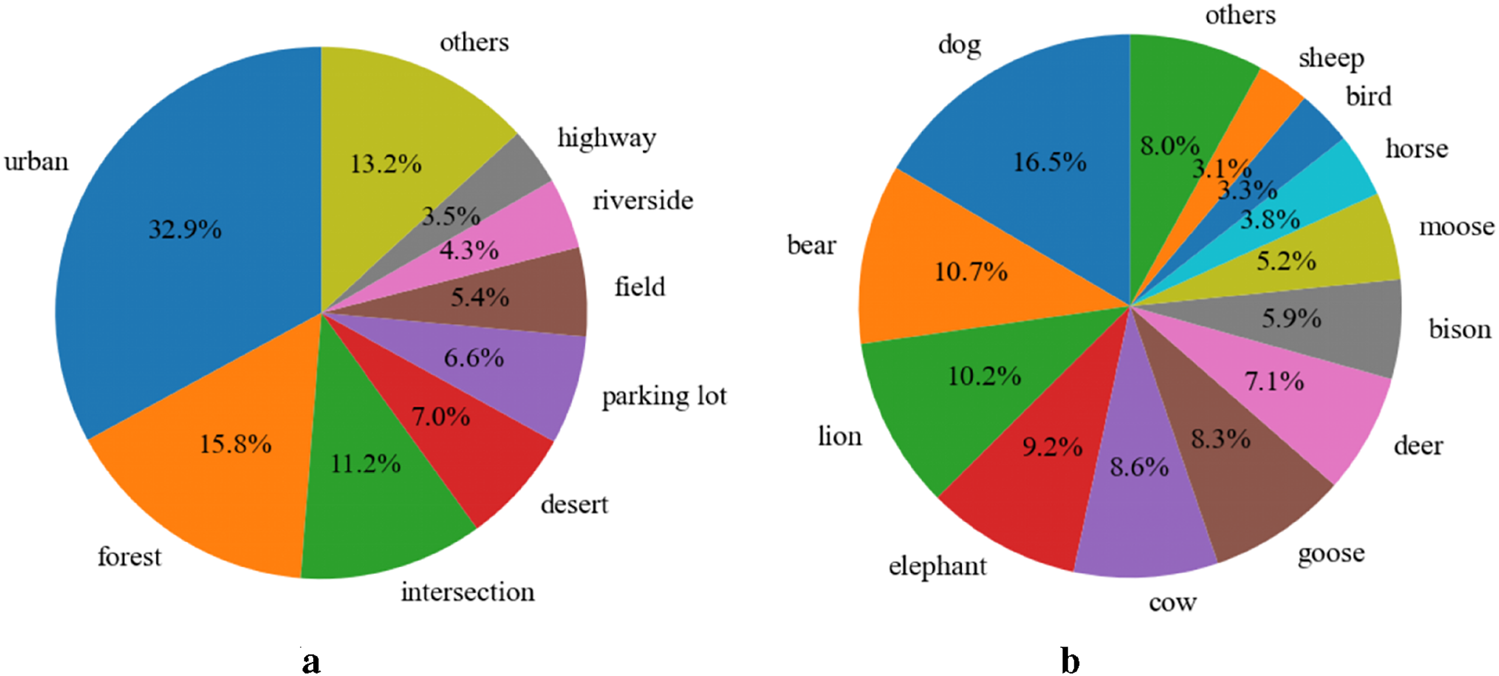
Distribution of scenarios and animal types in the dataset. (a) Scenario statistics. (b) Animal statistics.
The driving scenes in AniDriveQA span various environmental contexts, including urban roads, forests, intersections, and off-road locations such as deserts and riversides. This scene-level diversity reflects the real-world complexity in which animals may appear and allows for a comprehensive evaluation of vision-language models across a spectrum of traffic conditions and geographies.
3 Results
3.1 Implementation details
The methodology employed in this study involves several key components. Data annotation was performed using multi-step reasoning workflows with large language models. Video data were collected via web crawling using yt-dlp, and the Qwen-72B model was deployed locally to perform multi-step reasoning for annotation. For model fine-tuning, LLaVA-v1.5-7B was used as the base model, with LoRA fine-tuning (rank = 8). The LLMFactory toolkit was utilized for large model training. All experiments were conducted on an NVIDIA RTX A6000 GPU with 48 GB memory.
To validate the effectiveness of DeepSeek R1 14B scoring, we had two independent raters manually score the animal impact and driving scene labels for samples generated by two VLM models, LLaVA-1.5-13B (175 samples) Liu et al. (2023) and DeepSeek-VL2-Small (151 samples), on a scale of 1–10. We then computed the Cosine Similarity and Pearson Correlation between these scores and those produced by DeepSeek R1 Guo et al. (2025), to validate the effectiveness of DeepSeek R1’s scoring and its agreement with human ratings. Additionally, we calculated the Cosine Similarity and Pearson Correlation between the scores from the two raters.
LMSYS Zheng et al. (2024a) pointed out the feasibility of using GPT-4 as an evaluator to score question-answering results on a 1–10 scale, showing a high consistency with human evaluations. In addition, LLM-EVAL Lin and Chen (2023) proposed a multidimensional evaluation method for open-domain QA, achieving more comprehensive assessments through prompt engineering. Consistent with these findings, it can be seen in Tables 2, 3 that although DeepSeek’s scores have a lower Pearson correlation with human ratings than the correlation between the human raters themselves, they still show a strong positive correlation, and the cosine similarity is extremely high.
TABLE 2
| ScoreType | Model | Human | Cosine similarity | Pearson correlation | Sample number |
|---|---|---|---|---|---|
| Animal impact | DeepSeek-VL2-Small | Person 0 | 0.978 | 0.231 | 151 |
| Animal impact | DeepSeek-VL2-Small | Person 1 | 0.953 | 0.133 | 151 |
| Animal impact | LLaVA-1.5-13B-HF | Person 0 | 0.978 | 0.178 | 175 |
| Animal impact | LLaVA-1.5-13B-HF | Person 1 | 0.982 | 0.234 | 175 |
| Driving scene | DeepSeek-Vl2-Small | Person 0 | 0.976 | 0.358 | 151 |
| Driving scene | DeepSeek-VL2-Small | Person 1 | 0.932 | 0.432 | 151 |
| Driving scene | LLaVA-1.5-13B-HF | Person 0 | 0.981 | 0.322 | 175 |
| Driving scene | LLaVA-1.5-13B-HF | Person 1 | 0.979 | 0.277 | 175 |
Cosine similarity and Pearson correlation for each ScoreType-Model-Human combination.
TABLE 3
| ScoreType | Model | Cosine similarity | Pearson correlation | Sample number |
|---|---|---|---|---|
| Animal impact | LLaVA-1.5-13B-HF | 0.986 | 0.585 | 175 |
| Animal impact | DeepSeek-VL2-Small | 0.971 | 0.388 | 151 |
| Driving scene | LLaVA-1.5-13B-HF | 0.985 | 0.457 | 175 |
| Driving scene | DeepSeek-VL2-Small | 0.954 | 0.595 | 151 |
Aggregated similarity and correlation between two human annotators for each ScoreType.
3.2 Main results
This paper evaluated eight open-source vision-language models on AniDriveQA, including five 7B-scale models (e.g., LLaVA-1.5-7B, Qwen2.5-VL-7B) and three 13B-scale models (e.g., LLaVA-1.5-13B, InstructBLIP-Vicuna-13B). All models are tested under a zero-shot setting with the same prompt template and evaluated following the metrics described above. To facilitate comparison, subjective scores originally rated on a 1–10 scale are linearly scaled to a 1–100 range. The evaluation results are summarized in Table 4.
TABLE 4
| Model | Scene description text score | Species recognition accuracy | Behavior recognition accuracy | Impact analysis text score | Driving suggestion text score |
|---|---|---|---|---|---|
| Qwen2.5-VL-7B Bai et al. (2025) | 70.42 | 0.64 | 0.77 | 63.88 | 64.39 |
| MiniCPM-Llama3-V2.5 Yao et al. (2024) | 59.03 | 0.59 | 0.67 | 66.83 | 66.10 |
| LLaVA-1.5-7B Liu et al. (2023) | 51.77 | 0.47 | 0.12 | 50.25 | 52.16 |
| InternLM-XComposer2.5-7B Zhang et al. (2024) | 60.01 | 0.59 | 0.87 | 71.77 | 69.59 |
| Janus-Pro-7B Chen et al. (2025b) | 54.33 | 0.55 | 0.24 | 54.92 | 58.32 |
| LLaVA-1.5-13B Liu et al. (2023) | 54.67 | 0.48 | 0.18 | 52.90 | 56.49 |
| InstructBLIP-Vicuna-13B Liu et al. (2024a) | 46.05 | 0.51 | 0.08 | 49.80 | 51.24 |
| Ovis-Clip-Qwen1.5-14B Lu et al. (2024) | 65.19 | 0.57 | 0.65 | 58.92 | 61.98 |
| LLaVA-1.5-7B (Fintuned) | 72.87 | 0.74 | 0.87 | 70.96 | 68.17 |
Performance of open-source VLMs on the AniDriveQA dataset. Bold and underlined values denote the highest and second-highest scores per column.
The results reveal notable differences among models. Qwen2.5-VL-7B achieves the best overall performance, demonstrating strong abilities in both perception and reasoning tasks, with leading results across scene description, species recognition, and driving suggestion. It consistently outperforms other models in both closed-form classification and open-form generation tasks. Other models, such as Ovis-Clip-Qwen1.5-14B and MiniCPM-Llama3-V2.5, perform competitively on closed-form tasks, each achieving species recognition accuracies around 0.6 and maintaining reasonable behavior recognition performance. In contrast, models like LLaVA-1.5 and InstructBLIP-Vicuna-13B show significant limitations in fine-grained reasoning, with behavior recognition accuracies dropping below 0.2, and lower text quality scores in impact analysis and driving suggestion tasks.
These results highlight that while some models perform reasonably on basic recognition tasks, they struggle when deeper semantic understanding and contextual reasoning are required. The results also demonstrate that AniDriveQA effectively distinguishes models’ abilities in perception and reasoning specifically under animal-involved driving scenarios, providing a targeted benchmark for evaluating vision-language models in safety-critical and rare-event contexts. Representative qualitative outputs from selected models are illustrated in Figure 6.
FIGURE 6
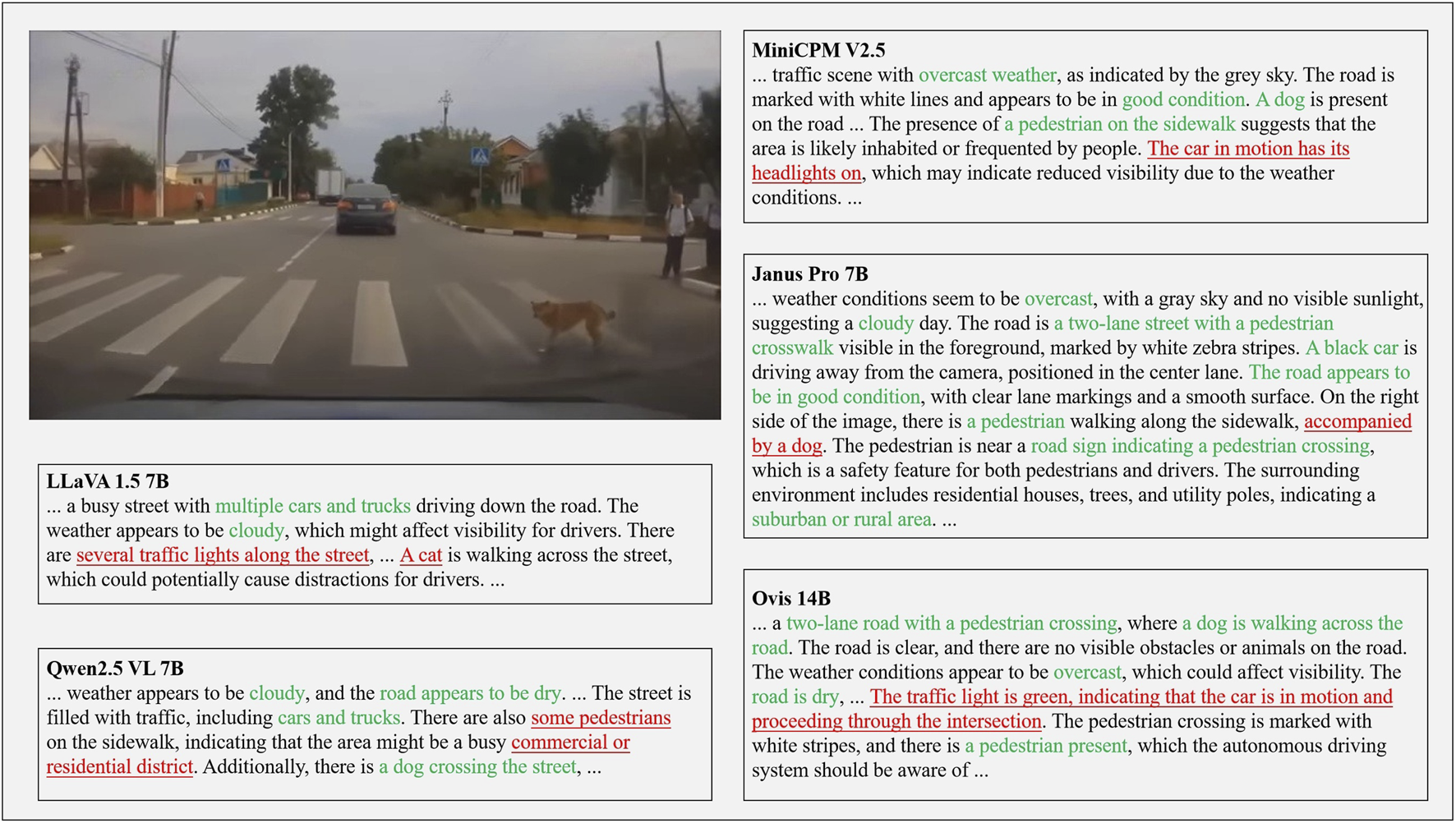
Example outputs generated by different vision-language models.
To further investigate data adaptability, this paper finetuned LLaVA-1.5-7B model on AniDriveQA using the llamafactory toolkit Zheng Y. et al. (2024) and the LoRA technique (Hu et al., 2022). During training, the multimodal projection layers are frozen to maintain visual feature extraction capabilities, while the core LLM and visual encoder parameters are updated. The training process adopts a context window of 4096 tokens, employs a linear warm-up followed by cosine decay across five epochs, and leverages mixed-precision training to improve efficiency.
In addition to finetuning on AniDriveQA alone, this paper explored a mixed-data strategy by combining AniDriveQA with the CODA-LM benchmark. This paper designed three experimental settings: finetuning solely on AniDriveQA, finetuning solely on CODA-LM, and finetuning on the combined dataset. For evaluation, AniDriveQA tasks are assessed using the same methodology described earlier, combining classification accuracy for closed-form tasks and LLM-based scoring for open-form tasks, while CODA-LM tasks are evaluated using its original evaluation protocol. The results are summarized in Table 5.
TABLE 5
| Model | AniDriveQA | CODA-LM | ||||||
|---|---|---|---|---|---|---|---|---|
| Scene description text score | Species recognition accuracy | Behavior recognition accuracy | Impact analysis text score | Driving suggestion text score | General description text score | Regional awareness text score | Driving suggestion text score | |
| LLaVA-1.5-7B | 51.88 | 0.47 | 0.12 | 59.36 | 61.14 | 19.30 | 42.06 | 23.16 |
| Finetuned on AniDriveQA | 72.87 | 0.74 | 0.87 | 70.96 | 68.17 | 30.54 | 38.28 | 49.15 |
| Finetuned on CODA-LM | 70.34 | 0.42 | 0.77 | 61.24 | 64.40 | 54.87 | 74.90 | 57.38 |
| Finetuned on Mixed Data | 74.80 | 0.75 | 0.87 | 68.08 | 71.17 | 59.04 | 64.50 | 60.36 |
Comparison of finetuned models on the AniDriveQA dataset and CODA-LM benchmark. Bold and underlined values denote the highest and second-highest scores per column.
Finetuning solely on AniDriveQA significantly enhances model performance in animal-involved scenarios, highlighting the importance of targeted rare-event data. Finetuning on CODA-LM improves general driving scene understanding but shows limited gains in handling rare animal-related events. Finetuning on the combined dataset achieves the best overall results, suggesting that integrating both traditional and rare driving scenarios enables models to better generalize across common and safety-critical conditions.
Overall, these experiments demonstrate that AniDriveQA is not only a challenging benchmark for evaluating vision-language models in complex autonomous driving scenarios but also an effective resource for improving model robustness and reasoning through finetuning. By rigorously testing models across both closed-form and open-form tasks, AniDriveQA promotes the development of safer and more intelligent autonomous driving systems capable of handling unpredictable real-world situations.
4 Discussion
To better compare our dataset, we evaluate it against the latest similar datasets, as shown in Table 6. Our dataset significantly differs from prior works such as CODA-LM Chen K. et al. (2025) and SUP-AD Sima et al. (2024). Specifically, while CODA-LM Chen K. et al. (2025) contains fewer than 500 scenes with animals and lacks detailed animal information, and SUP-AD Sima et al. (2024) does not provide driving advice or animal information, our dataset contains 12,000 scenes with animals and provides comprehensive annotations including scene descriptions, object descriptions, driving advice, and animal information. This richer annotation enables more detailed analysis and model evaluation, addressing limitations in prior datasets. By incorporating these additional dimensions, our work facilitates more thorough comparisons and insights, thereby enhancing the scope and utility of the results.
TABLE 6
| Dataset | Scenes with animals | Scene desc. | Object desc. | Driving sug. | Animal info. |
|---|---|---|---|---|---|
| CODA-LM Chen et al. (2025a) | 500 | ||||
| SUP-AD Sima et al. (2024) | - | ||||
| Ours | 12K |
Comparison of datasets.
This paper proposed AniDriveQA, a novel visual question answering dataset specifically designed to evaluate the reasoning capabilities of vision-language models in animal-involved driving scenarios. The dataset is constructed through a semi-automated pipeline that combines internet video mining with LLM-based annotation. It covers a diverse set of tasks, including scene description, animal description, and driving suggestion. Comprehensive experiments on a range of open-source models demonstrate the effectiveness of AniDriveQA in revealing the strengths and limitations of current vision-language models in complex and safety-critical scenarios. Nevertheless, deployment remains challenging, and future work should improve model robustness and efficiency to ensure safe and reliable performance under rare animal appearances, real-time constraints, and diverse driving conditions.
This work fills a critical gap in autonomous driving research by introducing a benchmark dataset that systematically evaluates vision-language models in rare but safety-critical animal-involved scenarios, advancing the study of long-tail perception and reasoning. Animal-related traffic accidents cause substantial human, economic, and ecological losses each year, and this research contributes to safer and more reliable autonomous driving systems by enabling more robust perception and decision-making in such scenarios.
Statements
Data availability statement
The dataset AniDriveQA for this study can be found at https://pan.baidu.com/s/1MyUQkr3OuKIJyyTQ2HI_EQ, with the extraction code r2in.
Ethics statement
The manuscript presents research on animals that do not require ethical approval for their study.
Author contributions
RW: Conceptualization, Data curation, Methodology, Software, Validation, Writing – original draft, Writing – review and editing, Visualization. RqW: Conceptualization, Data curation, Methodology, Software, Validation, Visualization, Writing – original draft, Writing – review and editing. HH: Conceptualization, Supervision, Validation, Writing – review and editing. HY: Data curation, Writing – review and editing.
Funding
The author(s) declare that financial support was received for the research and/or publication of this article. This research was supported by the Institute Foundation of China Academy of Railway Sciences Corporation Limited (2023YJ088), the Joint Fund Project of the National Natural Science Foundation of China (U2268217) and the Science and Technology Research and Development Plan of China State Railway Group Co., Ltd. (No. RITS2023KF03, 2023YJ359).
Conflict of interest
Authors RiW and HH were employed by China Academy of Railway Sciences Corporation Ltd.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The authors declare that this study was supported by the Institute Foundation of China Academy of Railway Sciences Corporation Limited and the Science and Technology Research and Development Plan of China State Railway Group Co., Ltd. The funders were involved in the study through their contributions to conceptualization, methodology, software development, validation, supervision, data curation, visualization, and manuscript preparation.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Any alternative text (alt text) provided alongside figures in this article has been generated by Frontiers with the support of artificial intelligence and reasonable efforts have been made to ensure accuracy, including review by the authors wherever possible. If you identify any issues, please contact us.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
1
Bai J. Bai S. Chu Y. Cui Z. Dang K. Deng X. et al (2023). Qwen technical report. arXiv preprint arXiv:2309.16609.
2
Bai S. Chen K. Liu X. Wang J. Ge W. Song S. et al (2025). Qwen2. 5-vl technical report. arXiv preprint arXiv:2502.13923.
3
Caesar H. Bankiti V. Lang A. H. Vora S. Liong V. E. Xu Q. et al (2020). “Nuscenes: a multimodal dataset for autonomous driving,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 11621–11631.
4
Cao X. Zhou T. Ma Y. Ye W. Cui C. Tang K. et al (2024). “Maplm: a real-world large-scale vision-language benchmark for map and traffic scene understanding,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 21819–21830. 10.1109/cvpr52733.2024.02061
5
Chang M.-F. Lambert J. Sangkloy P. Singh J. Bak S. Hartnett A. et al (2019). “Argoverse: 3d tracking and forecasting with rich maps,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 8748–8757.
6
Chen L. Sinavski O. Hünermann J. Karnsund A. Willmott A. J. Birch D. et al (2024). “Driving with llms: fusing object-level vector modality for explainable autonomous driving,” in 2024 IEEE International Conference on Robotics and Automation (ICRA) (IEEE), 14093–14100.
7
Chen K. Li Y. Zhang W. Liu Y. Li P. Gao R. et al (2025a). “Automated evaluation of large vision-language models on self-driving corner cases,” in 2025 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) (IEEE), 7817–7826.
8
Chen X. Wu Z. Liu X. Pan Z. Liu W. Xie Z. et al (2025b). Janus-pro: unified multimodal understanding and generation with data and model scaling. arXiv preprint arXiv:2501.17811.
9
Corbière C. Roburin S. Montariol S. Bosselut A. Alahi A. (2025). Drivingvqa: analyzing visual chain-of-thought reasoning of vision language models in real-world scenarios with driving theory tests. arXiv e-prints, arXiv–2501.
10
Cordts M. Omran M. Ramos S. Rehfeld T. Enzweiler M. Benenson R. et al (2016). “The cityscapes dataset for semantic urban scene understanding,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 3213–3223. 10.1109/cvpr.2016.350
11
Deruyttere T. Vandenhende S. Grujicic D. Van Gool L. Moens M.-F. (2019). Talk2car: taking control of your self-driving car. arXiv preprint arXiv:1909.10838.
12
Donaldson B. M. (2017). Improving animal-vehicle collision data for the strategic application of mitigation. Charlottesville, VA: Virginia Transportation Research Council.
13
Geiger A. Lenz P. Stiller C. Urtasun R. (2013). Vision meets robotics: the kitti dataset. Int. J. Robotics Res.32, 1231–1237. 10.1177/0278364913491297
14
Guo D. Yang D. Zhang H. Song J. Zhang R. Xu R. et al (2025). Deepseek-r1: incentivizing reasoning capability in llms via reinforcement learning. arXiv preprint arXiv:2501.12948.
15
Hu E. J. Shen Y. Wallis P. Allen-Zhu Z. Li Y. Wang S. et al (2022). Lora: low-rank adaptation of large language models. ICLR, 1–3.
16
Huang X. Cheng X. Geng Q. Cao B. Zhou D. Wang P. et al (2018). “The apolloscape dataset for autonomous driving,” in Proceedings of the IEEE conference on computer vision and pattern recognition workshops, 954–960.
17
Inoue Y. Yada Y. Tanahashi K. Yamaguchi Y. (2024). “Nuscenes-mqa: integrated evaluation of captions and qa for autonomous driving datasets using markup annotations,” in Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 930–938. 10.1109/wacvw60836.2024.00104
18
Ishihara K. Sasaki K. Takahashi T. Shiono D. Yamaguchi Y. (2025). Stride-qa: visual question answering dataset for spatiotemporal reasoning in urban driving scenes. arXiv preprint arXiv:2508.10427.
19
Jain K. Chhangani V. Tiwari A. Krishna K. M. Gandhi V. (2023). “Ground then navigate: language-guided navigation in dynamic scenes,” in 2023 IEEE International Conference on Robotics and Automation (ICRA) (IEEE), 4113–4120.
20
Jocher G. (2020). Yolov5 - you only look once. Available online at: https://github.com/ultralytics/yolov5.
21
Kim J. Rohrbach A. Darrell T. Canny J. Akata Z. (2018). “Textual explanations for self-driving vehicles,” in Proceedings of the European conference on computer vision (ECCV), 563–578.
22
Lin Y.-T. Chen Y.-N. (2023). Llm-eval: unified multi-dimensional automatic evaluation for open-domain conversations with large language models. arXiv preprint arXiv:2305.13711.
23
Liu H. Li C. Wu Q. Lee Y. J. (2023). Visual instruction tuning. Adv. neural Inf. Process. Syst.36, 34892–34916.
24
Liu H. Li C. Li Y. Lee Y. J. (2024a). “Improved baselines with visual instruction tuning,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 26296–26306.
25
Liu S. Zeng Z. Ren T. Li F. Zhang H. Yang J. et al (2024b). “Grounding dino: marrying dino with grounded pre-training for open-set object detection,” in European Conference on Computer Vision (Springer), 38–55.
26
Lu S. Li Y. Chen Q.-G. Xu Z. Luo W. Zhang K. et al (2024). Ovis: structural embedding alignment for multimodal large language model. arXiv:2405.20797.
27
Ma Y. Cui C. Cao X. Ye W. Liu P. Lu J. et al (2024). “Lampilot: an open benchmark dataset for autonomous driving with language model programs,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 15141–15151. 10.1109/cvpr52733.2024.01434
28
Marcu A.-M. Chen L. Hünermann J. Karnsund A. Hanotte B. Chidananda P. et al (2024). “Lingoqa: visual question answering for autonomous driving,” in European Conference on Computer Vision (Springer), 252–269.
29
Martínez-Hinojosa R. Garcia-Herrera J. Garduño I. Arcos-Gutiérrez H. Navarro-Rojero M. Mercado-Lemus V. et al (2025). Optimization of polymer stake geometry by fea to enhance the retention force of automotive door panels. Adv. Eng. Lett.4, 73–82. 10.46793/adeletters.2025.4.2.3
30
Papineni K. Roukos S. Ward T. Zhu W.-J. (2002). “Bleu: a method for automatic evaluation of machine translation,” in Proceedings of the 40th annual meeting of the Association for Computational Linguistics, 311–318. 10.3115/1073083.1073135
31
Qian T. Chen J. Zhuo L. Jiao Y. Jiang Y.-G. (2024). “Nuscenes-qa: a multi-modal visual question answering benchmark for autonomous driving scenario,” in Proceedings of the AAAI Conference on Artificial Intelligence, 4542–4550. 10.1609/aaai.v38i5.28253
32
Radford A. Kim J. W. Hallacy C. Ramesh A. Goh G. Agarwal S. et al (2021). “Learning transferable visual models from natural language supervision,” in International conference on machine learning (PmLR), 8748–8763.
33
Sachdeva E. Agarwal N. Chundi S. Roelofs S. Li J. Kochenderfer M. et al (2024). “Rank2tell: a multimodal driving dataset for joint importance ranking and reasoning,” in Proceedings of the IEEE/CVF winter conference on applications of computer vision, 7513–7522.
34
Shao H. Hu Y. Wang L. Song G. Waslander S. L. Liu Y. et al (2024). “Lmdrive: closed-loop end-to-end driving with large language models,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 15120–15130. 10.1109/cvpr52733.2024.01432
35
Sima C. Renz K. Chitta K. Chen L. Zhang H. Xie C. et al (2024). “Drivelm: driving with graph visual question answering,” in European Conference on Computer Vision (Springer), 256–274.
36
Sun P. Kretzschmar H. Dotiwalla X. Chouard A. Patnaik V. Tsui P. et al (2020). “Scalability in perception for autonomous driving: waymo open dataset,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2446–2454.
37
Tian K. Mao J. Zhang Y. Jiang J. Zhou Y. Tu Z. (2025). Nuscenes-spatialqa: a spatial understanding and reasoning benchmark for vision-language models in autonomous driving. arXiv preprint arXiv:2504.03164.
38
Toropov E. Tumasov A. Vashurin A. Butin D. Stepanov E. (2023). Hardware-in-the-loop testing of vehicle’s electronic stability control system. Appl. Eng. Lett. J. Eng. Appl. Sci.8, 70–79. 10.18485/aeletters.2023.8.2.4
39
Vedantam R. Lawrence Zitnick C. Parikh D. (2015). “Cider: consensus-based image description evaluation,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 4566–4575. 10.1109/cvpr.2015.7299087
40
Wu D. Han W. Liu Y. Wang T. Xu C.-z. Zhang X. et al (2025). “Language prompt for autonomous driving,” in Proceedings of the AAAI Conference on Artificial Intelligence, 8359–8367. 10.1609/aaai.v39i8.32902
41
Xie S. Kong L. Dong Y. Sima C. Zhang W. Chen Q. A. et al (2025). Are vlms ready for autonomous driving? an empirical study from the reliability, data, and metric perspectives. arXiv preprint arXiv:2501.04003.
42
Xing S. Hua H. Gao X. Zhu S. Li R. Tian K. et al (2024). Autotrust: benchmarking trustworthiness in large vision language models for autonomous driving. arXiv preprint arXiv:2412.15206.
43
Xu Y. Yang X. Gong L. Lin H.-C. Wu T.-Y. Li Y. et al (2020). “Explainable object-induced action decision for autonomous vehicles,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 9523–9532.
44
Xu L. Huang H. Liu J. (2021). “Sutd-trafficqa: a question answering benchmark and an efficient network for video reasoning over traffic events,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 9878–9888.
45
Yao Y. Yu T. Zhang A. Wang C. Cui J. Zhu H. et al (2024). Minicpm-v: a gpt-4v level mllm on your phone. arXiv preprint arXiv:2408.01800.
46
yt-dlp Contributors (2021). yt-dlp: a youtube-dl fork with additional features and fixes. Available online at: https://github.com/yt-dlp/yt-dlp.
47
Yu F. Chen H. Wang X. Xian W. Chen Y. Liu F. et al (2020). “Bdd100k: a diverse driving dataset for heterogeneous multitask learning,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2636–2645.
48
Zhang P. Dong X. Zang Y. Cao Y. Qian R. Chen L. et al (2024). Internlm-xcomposer-2.5: a versatile large vision language model supporting long-contextual input and output. arXiv preprint arXiv:2407.03320.
49
Zheng L. Chiang W.-L. Sheng Y. Zhuang S. Wu Z. Zhuang Y. et al (2023). Judging llm-as-a-judge with mt-bench and chatbot arena. Adv. Neural Inf. Process. Syst.36, 46595–46623.
50
Zheng L. Chiang W.-L. Sheng Y. Li T. Zhuang S. Wu Z. et al (2024a). Lmsys-chat-1m: a large-scale real-world llm conversation dataset. Available online at: https://arxiv.org/abs/2309.11998.
51
Zheng Y. Zhang R. Zhang J. Ye Y. Luo Z. Feng Z. et al (2024b). Llamafactory: unified efficient fine-tuning of 100+ language models. arXiv preprint arXiv:2403.13372.
52
Zhou B. Lapedriza A. Khosla A. Oliva A. Torralba A. (2017). Places: a 10 million image database for scene recognition. IEEE Trans. Pattern Analysis Mach. Intell.40, 1452–1464. 10.1109/tpami.2017.2723009
Summary
Keywords
vision-language models, visual question answering (VQA), autonomous driving, animal-involved scenarios, benchmark dataset
Citation
Wang R, Wang R, Hu H and Yu H (2025) AniDriveQA: a VQA dataset for driving scenes with animal presence. Front. Robot. AI 12:1684845. doi: 10.3389/frobt.2025.1684845
Received
13 August 2025
Accepted
26 September 2025
Published
28 October 2025
Volume
12 - 2025
Edited by
Kathryn Elizabeth Kasmarik, University of New South Wales Canberra, Australia
Reviewed by
Aleksandar Ašonja, Business Academy University (Novi Sad), Serbia
Muhammad Javed, Shanghai Maritime University, China
Updates
Copyright
© 2025 Wang, Wang, Hu and Yu.
This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Hao Hu, hhcars11@163.com
Disclaimer
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.