 Iyan E. Mulia*
Iyan E. Mulia* Kenji Satake
Kenji Satake- Earthquake Research Institute, The University of Tokyo, Tokyo, Japan
Being situated on the major subduction zones in conjunction with a considerable number of submarine active faults and coastal volcanoes, Japan has a long history of catastrophic tsunami events. Consequently, enormous efforts in disaster mitigation, particularly in relation with tsunami hazards, have been made across the country. It is of our interest to review the developments of tsunami observing systems in Japan, which may lead to a global implication beyond national boundaries. In this paper, we first discuss, in general, the evolution of past to present tsunami observing systems available around the territory of Japan. More specifically, we identify the existing offshore observational networks that are mainly consisted of cabled ocean bottom pressure gages and global navigation satellite system buoys, and briefly analyze their performance and viability in the long-term future. In that context, we also appraise the potential of emerging technologies in the offshore tsunami detection leveraging unconventional platforms such as commercial ships and airplanes, which have recently been introduced by several studies in Japan.
Introduction
Tsunamis have been part of Japan’s history since thousands of years ago. A paleotsunami research conducted in the eastern Hokkaido of Japan identified at least 15 prehistoric tsunamis dating back to approximately 6000 BP that had occurred in the region (Sawai et al., 2009). The abrupt and violent nature of tsunamis has startled the Japanese coastal communities and will continue to threaten for years to come. Hence, the frequent struggles to cope with such a destructive force of nature have brought Japan to the forefront of tsunami disaster prevention technologies. Long before the modern instrumental era, the earliest form of a tsunami disaster prevention was warnings carved in stones, admonishing the inhabitants about the past tsunami event in the vicinity. Hundreds of such stone markers were found along the coasts of Japan, and some were approximately 600 years old (Tkalich, 2011), which indicate the Japanese people’s awareness to the potentially repeated tsunami at the same location. Other than commemorating the ancestral memory of past events, this is among the first notable milestones of the functioning tsunami warning system invented by the Japanese society as part of their efforts to tame the devastating natural disaster.
The stones have now evolved into cutting-edge technologies manifested in various sophisticated geophysical monitoring devices. However, before we proceed with the most recent advanced apparatus, the role of preceding conventional tide gages in the course of tsunami research in Japan is worth acknowledging. A study by Satake et al. (1988) was one of the earliest attempts to thoroughly quantify the response of such a relatively straightforward instrument to tsunamis. To date, there are more than 200 tide gages operating along the coast of Japan1, and some of them have been utilized either for inferring tsunami sources or validating forward models (e.g., Satake et al., 2013; Gusman et al., 2017). Another variant of a sea level measurement tool is seabed wave gages normally deployed at water depths of less than 50 m, which have also been reported to record tsunamis in Japan (Nagai et al., 2004, 2007). However, the typical placements of both tide and wave gages, being adjacent to the coastlines, are not ideal for an early tsunami detection. Hereinafter, we focus our discourse on the state-of-the-art existing and potential offshore tsunami observing systems in Japan.
Existing Offshore Observing Systems
A global navigation satellite system (GNSS) buoy, first known as a global positioning system (GPS) buoy, is an advancement to the tide and wave gages in the tsunami observation, particularly in terms of station locations. The initial deep-sea GNSS buoy dedicated for the tsunami disaster mitigation in Japan was deployed in April 2004 at a water depth of 100 m, about 12 km offshore (Kato et al., 2005). There are presently 18 GNSS buoys around the coasts of Japan moored at water depths of 100–400 m with an approximately 10- to 20-km distance from shorelines (see Figure 1). The entire system is an integral part of the Nationwide Ocean Wave Information Network for Ports and Harbors (NOWPHAS) program administered by The Ports and Harbors Bureau of Japan’s Ministry of Land, Infrastructure, Transport and Tourism together with its associated organizations including the Port and Airport Research Institute. Additionally, a network of GNSS buoys that can also be used to monitor crustal activities is being proposed (Kato et al., 2018). In brief, each unit works using a mounted GNSS receiver on a floating buoy anchored to the seafloor, by which the sea surface fluctuations are measured based on a series of altitude records relative to the Earth’s ellipsoid. Then, the data is transmitted in real time to the terrestrial server via radio link. The GNSS buoy of the NOWPHAS uses a real-time kinematic (RTK) algorithm with an accuracy of 4 cm at a distance of 20 km from the base or reference station (Kawai et al., 2013). Such an accuracy is sufficient for tsunami detections as demonstrated during several events, such as the 2010 Chile (Kato et al., 2011) and 2011 Tohoku-oki (Kawai et al., 2013) tsunamis.
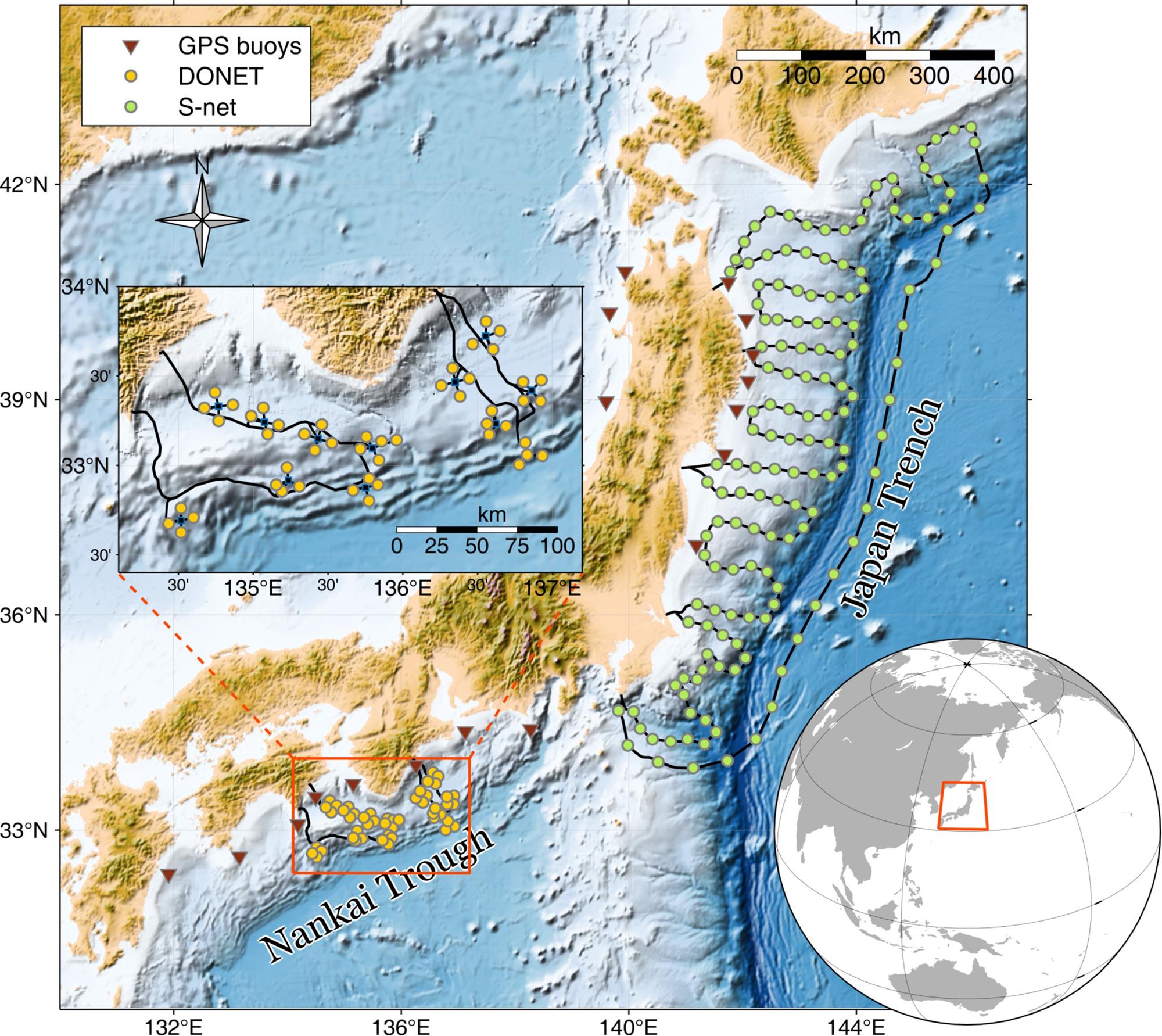
Figure 1. Three major networks of offshore tsunami observing system in Japan.
Unlike the RTK–GNSS buoys, where the measurement accuracy is constrained by the distance to the reference station, another system based on ocean bottom pressure (OBP) gages can be placed farther offshore at seafloor depths of more than 3,000 m. The earliest version of cabled OBP gages in Japan was laid in 1978 off Omaezaki by the Japan Meteorological Agency (Taira et al., 1985), followed by installations of a similar system at other locations operated by several Japanese institutions: the Earthquake Research Institute of the University of Tokyo, the National Research Institute for Earth Science and Disaster Resilience (NIED), and the Japan Agency for Marine–Earth Science and Technology (JAMSTEC). A complete list of prior cabled OBP systems in Japan can be found in Rabinovich and Eblé (2015).
In 2006, JAMSTEC started to install a large-scale 20 innovative cabled OBP gages paired with ocean bottom seismometers (OBSs) called the Deep Ocean-floor Network system for Earthquakes and Tsunamis (DONET) around the Nankai Trough (Figure 1). Later on, the network was expanded with additional 29 stations covering a wider area. In the DONET system, a group of four to five OBP gages are connected to a science node that acted as a hub linking the looped backbone cable to the instruments for data transmission and power (Kaneda et al., 2015). Such a configuration aims for an uninterrupted operation and functioning during the maintenance, replacement, or extension. The cable is one of the main appealing features of the system ensuring a fast and reliable high-rate data communication. Furthermore, the pressure sensor has an excellent accuracy capable of detecting less than a 1-cm tsunami generated by the 2015 Torishima volcanic earthquake (Wang et al., 2019) and a slightly larger tsunami of the 2016 Off-Mie earthquake (Kubota et al., 2018) including the 2011 Tohoku-oki event (Nosov et al., 2018). However, since the system was initially meant to monitor the hypocentral region of the Tonankai earthquake (Nakano et al., 2013), the spatial distribution of stations does not cover the entire seismogenic zone of the Nankai Trough, thus may not be optimal for quantifying earthquakes using tsunami data from other potential source regions (Mulia et al., 2017a).
While the attention was drawn to the Nankai Trough that was expected to host a large submarine earthquake in the near future, a megathrust earthquake ruptured the Japan Trench subduction zone in March 2011. The earthquake of magnitude Mw 9.0 accompanied with a giant tsunami shattered the country with direct tsunami impacts stretching 600 km along the coasts facing the Pacific Ocean (Suppasri et al., 2013). A few years later, as the answer to such a tragic event, the NIED of Japan installed the seafloor observation network for earthquakes and tsunami along the Japan Trench (S-net) consisted of 150 observatories equipped with both OBP gages and OBSs (Figure 1). Similar to DONET, the communication link is via submarine optical cable, but S-net has a considerably vaster coverage encompassing the entire focal region of the 2011 Tohoku-oki earthquake and its surrounding areas. Consequently, the network requires a length of 5,800 km of cable connecting each station within an interval of 30–50 km within an area of 1,000 km × 300 km (Kanazawa et al., 2016). Besides the overall astounding dimension and enhanced station distribution, a particular segment located in the outer rise region would be beneficial for real-time tsunami observations as the wave propagates faster in deep water (Mulia et al., 2019). Since the system is relatively new, S-net has hitherto registered only one small tsunami event from the August 20, 2016 off Sanriku earthquake characterized by a magnitude of Mw 6.0 (Kubota et al., 2020).
Potential Future Observing Systems
An unconventional way of utilizing a GNSS receiver on a ship turns out to be a promising alternative to measure tsunami elevations and currents. This type of measurement has been relatively well established in geodetic science (e.g., Roggenbuck et al., 2014). However, the first use of such an observation to detect the tsunami was reported by Foster et al. (2012), where they accidentally intercepted an offshore tsunami signal of ∼10-cm height near Hawaii originating from the Mw 8.8 2010 Maule, Chile earthquake. More recently, Inazu et al. (2016) conducted thorough analyses on GNSS height positioning records of a navigating research vessel off Tohoku region of Japan. The study suggested that using a precise point positioning (PPP) method, which does not require a reference station, the noise level of measured sea surface height (SSH) is approximately 10 cm, thus is suitable to detect offshore large tsunamis typically generated by earthquakes of magnitudes larger than Mw 8.5. With the noise level characterized from the actual observation, synthetic experiments to forecast coastal tsunami heights originating from a hypothetical megathrust earthquake (Mw 8.7) of the Nankai Trough were introduced (Inazu et al., 2016; Mulia et al., 2017b). Assuming that 92 commercial ships were available as observation platforms during the earthquake, the studies showed promising results complementing the existing DONET system. Inazu et al. (2018) further extended their study to ingeniously make use of GNSS horizontal positioning and ship heading records as a proxy for tsunami current measurement applied to the 2011 Tohoku-oki event. In principle, utilizing ships as observation platforms resembles the GNSS buoy system, but it offers a unique spatial coverage most likely wider than the conventional one, depending on the shipping lanes.
Motivated by the perennial distribution and spatial coverage of commercial airplane routes around Japan, another innovative approach to observe a tsunami from such a high-speed moving platform has been proposed (Hirobe et al., 2019). The notion was then supported by their results of airborne measurements of SSH using an airplane equipped with a GNSS receiver and a radar altimeter. The SSH can be obtained by subtracting the distance between the airborne radar and ocean surface from the airplane absolute altitude relative to a reference of Earth’s ellipsoid retrieved by a GNSS positioning method. In their study, they have conducted several field experiments around the Nankai Trough and validated the observed SSH against satellite altimetry data. Remarkably, the results suggest that the SSH variations along the airplane tracks can be measured with an accuracy of less than 10 cm, which is comparable to the ship-based observation. Similar airborne observations of SSH as part of the Japanese altimetry mission COMPIRA (Coastal and Ocean Measurement mission with Precise and Innovative Radar Altimetry), but for a different purpose with a lower level of accuracy was performed by Uematsu et al. (2013) using a wide-swath altimeter. To demonstrate how such a type of observation can be utilized for a real-time tsunami forecasting, Mulia et al. (2020) proposed an efficient tsunami data assimilation method numerically propagating the virtually observed SSH from actual 65 commercial airplanes to the areas of interest. Through numerical experiments, it is evident that assimilating spatiotemporal variations of SSH along the track of moving platforms can significantly improve the tsunami forecasting skill when underpinned by a decent source estimate.
Discussion
With 18 GNSS buoys, 49 OBPs of DONET, and 150 OBPs of S-net, Japan is a country with the largest offshore tsunami instrumentation in the world. The viability of these contemporary systems is proven by the numerous detected past tsunami events. The systems have greatly contributed to both practical and scientific applications in the tsunami disaster prevention field. However, implementing new similar systems in other regions and maintaining the existing ones are costly. The cost for a unit of GNSS buoy is estimated to be about US$3M, and a 1,000-km cabled observatory with 164 OBP gages is US$500M (Bernard and Titov, 2015). Therefore, it is unlikely to adopt Japan’s array configuration of tsunami observation networks to cover the world’s tsunamigenic regions. Even a more affordable system, such as the Deep-ocean Assessment and Reporting of Tsunamis (DART) (González et al., 2005) with an estimated cost of US$0.5M/station developed by the Pacific Marine Environmental Laboratory of the National Oceanic Atmospheric Administration, is probably still too expensive to maintain as not all tsunami-prone countries participate in this global initiative. Furthermore, regardless of the type, most ocean observing systems using dedicated platforms will inevitably encounter sustainability issues in the long run. For example, the DONET system was designed with the intended effective operational life span of a mere 20–30 years (Kawaguchi et al., 2008). A buoy-based platform has even shorter deployment duration of 1–2 years (González et al., 2005; Rabinovich and Eblé, 2015) or at least 10 years using expectedly improved buoy specifications (Kato et al., 2018).
On the contrary, the proposed new tsunami observing systems based on existing platforms, such as commercial ships and airplanes, may be potent to address future challenges in the tsunami observation, as their number will continuously grow over time. Moreover, the required measuring devices are readily available on a certain type of ships and airplanes, especially that of the more newly built. For example, the GNSS receiver is installed on all passenger ships and other types of ship over certain gross tonnage. Such ships are obligated to broadcast their voyage information (e.g., ship’s identity, type, position, course, speed, navigational status, and other safety-related information) through an Automatic Identification System (AIS), a real-time framework for sending and receiving data, enforced by the International Maritime Organization (IMO) (International Maritime Organization [IMO], 2002). However, a high-precision ship altitude information is not included in the present AIS data, but it can still be useful for large tsunami current observations (Inazu et al., 2018). In addition to the GNSS receiver, the radar altimetry is also available on most recent commercial airplanes, though normally, the radar is activated only during takeoff and landing (Hirobe et al., 2019). Furthermore, since using the existing avionic computer may not be feasible at the moment, radar observations by an airborne platform require a dedicated computer for SSH data processing. Similar to the AIS, commercial airplanes should also broadcast flight information (e.g., aircraft identification, position, altitude, speed, and other parameters) in real time via an Automatic Dependent Surveillance-Broadcast (ADS-B) system to comply with the International Civil Aviation Organization (ICAO) regulation (International Civil Aviation Organization [ICAO], 2014). Overall, the aforementioned studies have shown tangible results that the unconventional platforms can be used to measure tsunamis of more than 10-cm height offshore with a sufficient level of accuracy. However, new ancillary protocols in both AIS and ADS-B systems, to incorporate preprocessed SSH, or possibly other alternative reliable connection methods, are needed for real-time data transmission.
Nowadays, with the growing interest in avionic and maritime operations supported by the rapid advancement of navigation technology, there are many service providers that enable data access both openly and through a subscription. A real-time ship tracker is available owing to the AIS transponder equipped on the ships and a large number of terrestrial AIS-receiving stations supplemented by satellite AIS coverage. MarineTraffic is among other providers of ship tracking interface and data (e.g., FleetMon, Shipfinder, Vesselfinder, etc.) operating more than 2,000 AIS stations over 165 countries that records at least 800 million ship positions monthly2. Comparably, flight-tracking data derived from the ADS-B system is also available from several service providers such as Flightradar243, FlightAware, Plane Finder, etc. It is intriguing that majority of the providers of both ship and airplane tracking data offer free AIS or ADS-B receivers under a community-based project and data-sharing plan. This is an encouraging fact that would be favorable for the purpose of a cost-effective tsunami monitoring once the SSH can be included as one of the variables in the AIS and ADS-B systems. Additionally, data access and display are conveniently available on smartphone applications, which can be further exploited for early warning disseminations.
Although technically possible, activations or customizations of the required features for tsunami observations in the ordinary transportation infrastructures are subject to additional regulatory provisions. Otherwise, voluntary-based observations may also facilitate the implementation of the new approaches. Such a collaborative scheme engaging stakeholders is not new. A voluntary observing ship program for marine meteorological monitoring has been carried out for decades under the World Meteorological Organization auspices (Fletcher, 2008). Another voluntary observation has also been well manifested in the Comprehensive Observation Network for TRace gases by AIrLiner (CONTRAIL) project, in which commercial airlines provide an observational platform for obtaining free tropospheric CO2 worldwide (Machida et al., 2008). The same endeavor aiming at marine disaster preventions should be promoted due to the fact that millions of people around the world and US$ billions in assets are exposed to the global tsunami hazard (Løvholt et al., 2015). We envision that despite the developments of the new tsunami observing systems, which are still in their infancy and are locally applied to Japan, they could potentially serve as a global sustainable tsunami monitoring in the future when all various hurdles have been overcome. As illustrated in Figure 2, the global commercial shipping activities and flight routes exhibit an immense spatial coverage and density across the world’s oceans including at several major subduction zones, which could substantially enhance our preparedness against impending tsunamis.
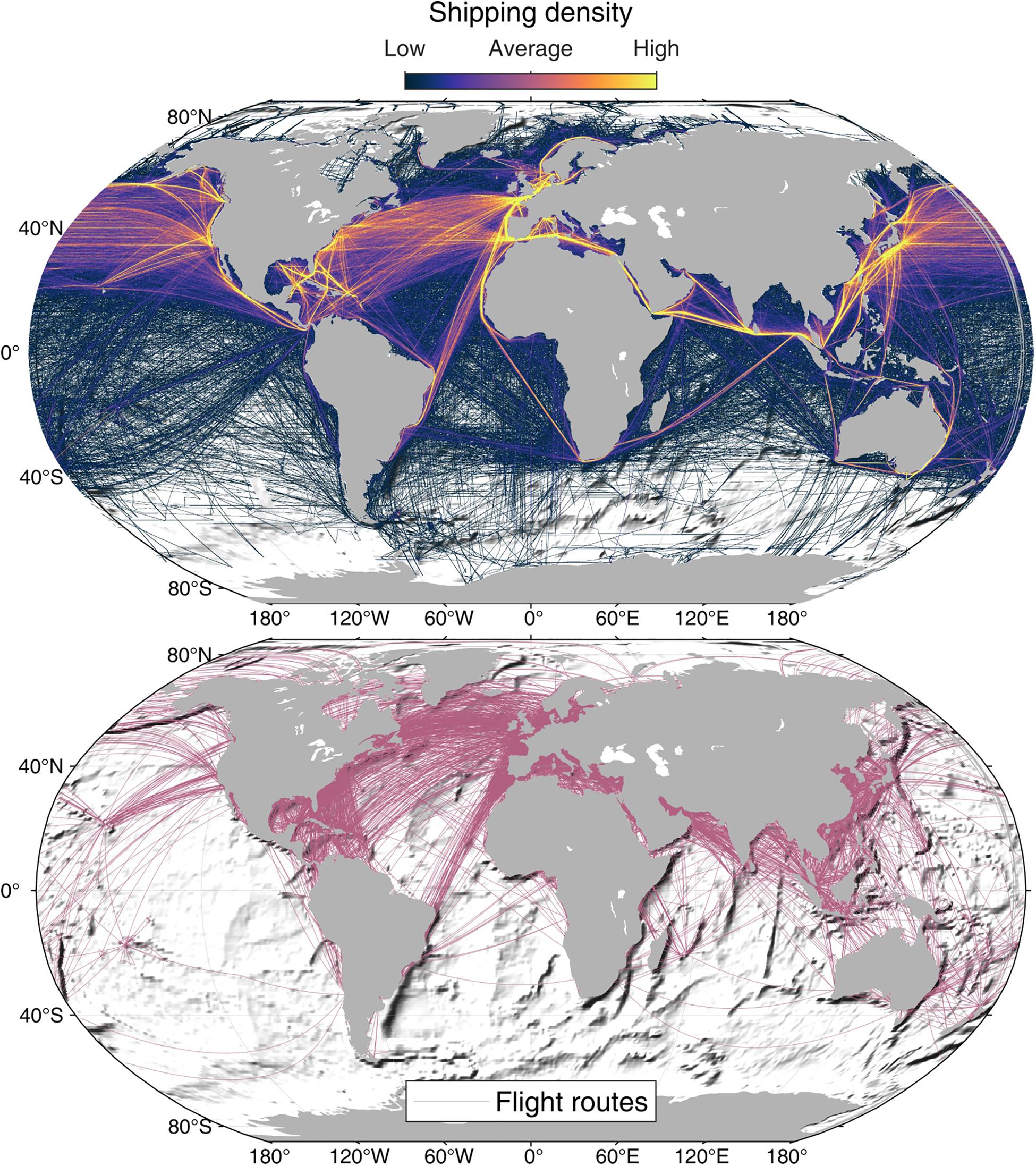
Figure 2. Global shipping density (top) and flight routes over the oceans (bottom).
Author’s Note
The ship density map is from a 1-year period (2004–2005) data obtained from the United Nations Environment Program compiled by the National Center for Ecological Analysis and Synthesis (http://ede.grid.unep.ch). Flight route data is based on airline route database of June 2014 available at https://openflights.org/data.html.
Author Contributions
IM and KS conceived and wrote the manuscript.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Footnotes
- ^ https://www.jodc.go.jp/jodcweb/JDOSS/infoTide.html, accessed 28 February 2020.
- ^ https://www.marinetraffic.com/
- ^ https://www.flightradar24.com/
References
Bernard, E., and Titov, V. (2015). Evolution of tsunami warning systems and products. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 373:20140371. doi: 10.1098/rsta.2014.0371
Fletcher, J. (2008). Meteorological Observations from Ships. Seaways. 7–10. London: The Nautical Institute.
Foster, J. H., Brooks, B. A., Wang, D., Carter, G. S., and Merrifield, M. A. (2012). Improving tsunami warning using commercial ships. Geophys. Res. Lett. 39:L09603.
González, F. I., Bernard, E. N., Meinig, C., Eble, M. C., Mofjeld, H. O., and Stalin, S. (2005). The NTHMP tsunameter network. Nat. Hazards 35, 25–39.
Gusman, A. R., Satake, K., Shinohara, M., Sakai, S. I., and Tanioka, Y. (2017). Fault slip distribution of the 2016 Fukushima earthquake estimated from tsunami waveforms. Pure Appl. Geophys. 174, 2925–2943.
Hirobe, T., Niwa, Y., Endoh, T., Mulia, I. E., Inazu, D., Yoshida, T., et al. (2019). Observation of sea surface height using airborne radar altimetry: a new approach for large offshore tsunami detection. J. Oceanogr. 75, 541–558.
Inazu, D., Ikeya, T., Waseda, T., Hibiya, T., and Shigihara, Y. (2018). Measuring offshore tsunami currents using ship navigation records. Prog. Earth Planet. Sci. 5:38.
Inazu, D., Waseda, T., Hibiya, T., and Ohta, Y. (2016). Assessment of GNSS-based height data of multiple ships for measuring and forecasting great tsunamis. Geosci. Lett. 3:25.
International Civil Aviation Organization [ICAO] (2014). ADS-B Implementation and Operations Guidance Document. Edition 7.0. Available at https://www.icao.int/APAC/Documents/edocs/cns/ADSB_AIGD7.pdf (accessed March 10, 2020).
International Maritime Organization [IMO] (2002). Guidelines for the Onboard Operational Use of Shipborne Automatic Identification System (AIS). Resolution A.917(22), London. Available at http://www.imo.org/en/KnowledgeCentre/IndexofIMOResolutions/Assembly/Documents/A.917(22).pdf (accessed March 10, 2020).
Kanazawa, T., Uehira, K., Mochizuki, M., Shinbo, T., Fujimoto, H., Noguchi, S., et al. (2016). S-Net Project, Cabled Observation Network for Earthquakes and Tsunamis, Abstract WE2B–3 Presented at SubOptic 2016, Suboptic. Tsukuba: National Research Institute for Earth Science and Disaster Resilience.
Kaneda, Y., Kawaguchi, K., Araki, E., Matsumoto, H., Nakamura, T., Kamiya, S., et al. (2015). Development and Application of an Advanced Ocean Floor Network System for Megathrust Earthquakes and Tsunamis. In Seafloor observatories. Berlin: Springer, 643–662.
Kato, T., Terada, Y., Ito, K., Hattori, R., Abe, T., Miyake, T., et al. (2005). Tsunami due to the 2004 September 5th off the Kii peninsula earthquake, Japan, recorded by a new GPS buoy. Earth Planet. Space 57, 297–301.
Kato, T., Terada, Y., Nishimura, H., Nagai, T., and Koshimura, S. (2011). Tsunami records due to the 2010 Chile Earthquake observed by GPS buoys established along the Pacific coast of Japan. Earth Planet. Space 63, e5–e8.
Kato, T., Terada, Y., Tadokoro, K., Kinugasa, N., Futamura, A., Toyoshima, M., et al. (2018). Development of GNSS buoy for a synthetic geohazard monitoring system. J. Disaster Res. 13, 460–471.
Kawaguchi, K., Kaneda, Y., and Araki, E. (2008). “The DONET: a real-time seafloor research infrastructure for the precise earthquake and tsunami monitoring,” in Proceedings of the OCEANS 2008-MTS/IEEE Kobe Techno-Ocean, (Piscataway, NJ: IEEE), 1–4.
Kawai, H., Satoh, M., Kawaguchi, K., and Seki, K. (2013). Characteristics of the 2011 Tohoku tsunami waveform acquired around Japan by NOWPHAS equipment. Coast. Eng. J. 55:1350008.
Kubota, T., Saito, T., and Suzuki, W. (2020). Millimeter-scale tsunami detected by a wide and dense observation array in the deep ocean: fault modeling of an Mw 6.0 interplate earthquake off Sanriku, NE Japan. Geophys. Res. Lett. 47:e2019GL085842.
Kubota, T., Suzuki, W., Nakamura, T., Chikasada, N. Y., Aoi, S., Takahashi, N., et al. (2018). Tsunami source inversion using time-derivative waveform of offshore pressure records to reduce effects of non-tsunami components. Geophys. J. Int. 215, 1200–1214.
Løvholt, F., Griffin, J., and Salgado-Gálvez, M. (2015). “Tsunami Hazard and Risk Assessment on the Global Scale,” in Encyclopedia of Complexity and Systems Science, ed. R. Meyers (Berlin: Springer).
Machida, T., Matsueda, H., Sawa, Y., Nakagawa, Y., Hirotani, K., Kondo, N., et al. (2008). Worldwide measurements of atmospheric CO2 and other trace gas species using commercial airlines. J. Atmos. Ocean. Technol. 25, 1744–1754.
Mulia, I. E., Gusman, A. R., and Satake, K. (2017a). Optimal design for placements of tsunami observing systems to accurately characterize the inducing earthquake. Geophys. Res. Lett. 44, 12–106.
Mulia, I. E., Gusman, A. R., Williamson, A. L., and Satake, K. (2019). An optimized array configuration of tsunami observation network off Southern Java, Indonesia. J. Geophys. Res. Solid Earth 124, 9622–9637.
Mulia, I. E., Hirobe, T., Inazu, D., Endoh, T., Niwa, Y., Gusman, A. R., et al. (2020). Advanced tsunami detection and forecasting by radar on unconventional airborne observing platforms. Sci. Rep. 10, 1–10. doi: 10.1038/s41598-020-59239-1
Mulia, I. E., Inazu, D., Waseda, T., and Gusman, A. R. (2017b). Preparing for the future Nankai Trough tsunami: a data assimilation and inversion analysis from various observational systems. J. Geophys. Res. Oceans 122, 7924–7937.
Nagai, T., Kato, T., Moritani, N., Izumi, H., Terada, Y., and Mitsui, M. (2007). Proposal of hybrid tsunami monitoring network system consisted of offshore, coastal and on-site wave sensors. Coast. Eng. J. 49, 63–76.
Nagai, T., Ogawa, H., Nukada, K., and Kudaka, M. (2004). Characteristics of the observed 2003 Tokachi-off earthquake tsunami profile. Coast. Eng. J. 46, 315–327.
Nakano, M., Nakamura, T., Kamiya, S. I., Ohori, M., and Kaneda, Y. (2013). Intensive seismic activity around the Nankai trough revealed by DONET ocean-floor seismic observations. Earth Planet. Space 65, 5–15.
Nosov, M., Karpov, V., Kolesov, S., Sementsov, K., Matsumoto, H., and Kaneda, Y. (2018). Relationship between pressure variations at the ocean bottom and the acceleration of its motion during a submarine earthquake. Earth Planet. Space 70:100.
Rabinovich, A. B., and Eblé, M. C. (2015). Deep-ocean measurements of tsunami waves. Pure Appl. Geophys. 172, 3281–3312.
Roggenbuck, O., Reinking, J., and Härting, A. (2014). Oceanwide precise determination of sea surface height from in-situ measurements on cargo ships. Mar. Geodesy 37, 77–96.
Satake, K., Fujii, Y., Harada, T., and Namegaya, Y. (2013). Time and space distribution of coseismic slip of the 2011 Tohoku earthquake as inferred from tsunami waveform data. Bull. Seismol. Soc. Am. 103, 1473–1492.
Satake, K., Okada, M., and Abe, K. (1988). Tide gauge response to tsunamis: measurements at 40 tide gauge stations in Japan. J. Mar. Res. 46, 557–571.
Sawai, Y., Kamataki, T., Shishikura, M., Nasu, H., Okamura, Y., Satake, K., et al. (2009). Aperiodic recurrence of geologically recorded tsunamis during the past 5500 years in eastern Hokkaido, Japan. J. Geophys. Res. Solid Earth 114:B01319.
Suppasri, A., Shuto, N., Imamura, F., Koshimura, S., Mas, E., and Yalciner, A. C. (2013). Lessons learned from the 2011 Great East Japan tsunami: performance of tsunami countermeasures, coastal buildings, and tsunami evacuation in Japan. Pure Appl. Geophys. 170, 993–1018. doi: 10.1098/rsta.2014.0373
Taira, K., Teramoto, T., and Kitagawa, S. (1985). Measurements of ocean bottom pressure with a quartz sensor. J. Oceanogr. Soc. Jpn. 41, 181–192.
Uematsu, A., Nakamura, R., Nakajima, Y., and Yajima, Y. (2013). “X-band interferometric SAR sensor for the Japanese altimetry mission, COMPIRA,” in Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium-IGARSS, (Piscataway, NJ: IEEE), 2943–2946.
Keywords: natural hazard, tsunami, offshore observing systems, Japan, unconventional platforms
Citation: Mulia IE and Satake K (2020) Developments of Tsunami Observing Systems in Japan. Front. Earth Sci. 8:145. doi: 10.3389/feart.2020.00145
Received: 13 March 2020; Accepted: 20 April 2020;
Published: 27 May 2020.
Edited by:
Katsuichiro Goda, University of Western Ontario, CanadaReviewed by:
Hyoungsu Park, Oregon State University, United StatesReza Amouzgar, University of Victoria, Canada
Copyright © 2020 Mulia and Satake. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Iyan E. Mulia, aXlhbkBlcmkudS10b2t5by5hYy5qcA==