 Guanghua Zhang
Guanghua Zhang Linghao Zeng2
Linghao Zeng2- 1School of Automation Science and Engineering, Faculty of Electronic and Information Engineering, Xi’an Jiaotong University, Xi’an, China
- 2School of Economics and Management, Chang’an University, Xi’an, China
- 3Beijing Institute of Electronic System Engineering, Beijing, China
- 4State Key Laboratory of Astronautic Dynamics, Xi’an Satellite Control Center, Xi’an, China
- 5Xi’an Satellite Control Center, Xi’an, China
The classical Kalman filter is a very important state estimation approach, which has been widely used in many engineering applications. The Kalman filter is optimal for linear dynamic systems with independent Gaussian noises. However, the independence and Gaussian assumptions may not be satisfied in practice. On the one hand, modeling physical systems usually results in discrete-time state-space models with correlated process and measurement noises. On the other hand, the noise is non-Gaussian when the system is disturbed by heavy-tailed noise. In this case, the performance of the Kalman filter will deteriorate, or even diverge. This paper is devoted to addressing the state estimation problem of linear dynamic systems with high-order autoregressive moving average (ARMA) non-Gaussian noise. First, a triplet Markov model is introduced to model the system with high-order ARMA noise, since this model relaxes the independence assumption of the hidden Markov model. Then, a new filter is derived based on correntropy, instead of the commonly used minimum mean square error (MMSE), to deal with non-Gaussian noise. Unlike the MMSE, which uses only second-order statistics of error, correntropy can capture second-order and higher-order statistics. Finally, simulation results verify the effectiveness of the proposed algorithm.
1 Introduction
State estimation is a very important problem in many engineering applications, such as energy internet, system control, tracking, and so on [Zandavi and Chung (2019); Zhang et al. (2022)]. These engineering applications are essentially a dynamic system, which is usually described as a state-space model. The hidden Markov model (HMM) is the one of the most commonly used state-space models (Zhang et al. (2018)). For linear case, the state estimation problem is generally solved by the well-known Kalman filter(KF) (Kalman (1960)), which is an optimal filter in the minimum mean square error (MMSE) sense. MMSE is one of the most commonly used cost function in the case of Gaussian noise, and MMSE approach is an estimator which minimizes the mean square error. In addition, a large number of nonlinear filters have been proposed to solve nonlinear estimation problems, such as extended Kalman filter, unscented Kalman filter, cubature Kalman filter, particle filter, to name but a few (Anderson and Moore (2012)).
Although the KF in general performs well, it has rigorous requirements, that is, the process and measurement noises of dynamic systems are independent and Gaussian. However, the independence and Gaussian assumptions do not always hold in practice (Zhang G. et al. (2021)). On one hand, in fact, the noise of most dynamic systems is correlated. Research has shown that modeling physical systems usually results in discrete-time state-space models with correlated process and measurement noises, and some practical applications are explained in (Saha and Gustafsson (2012)). In addition, the dynamic and measurement noise may even high-order (i.e., multi-step) correlated in some severe environments (Zhang D. et al. (2021)). On the other hand, the main reason for using the Gaussian assumption is that it is mathematically simple, but in fact, dynamic systems are usually disturbed by some heavy-tailed impulse noise (Roth et al. (2013)). When the independence and Gaussian assumptions are not satisfied, the KF may fail to output reliable estimation results.
To deal with correlated noise, the traditional method is to reconstruct an HMM by prewhitening processing, and then the classical KF can be used to estimate the state (Bar-Shalom et al. (2001)). Another solution is to characterize dynamic systems with correlated noise through more flexible state-space models, such as the pairwise Markov model (PMM) (Pieczynski and Desbouvries (2003)) and the triplet Markov model (TMM) (Ait-El-Fquih and Desbouvries (2006)). In the PMM, the state and measurement as a whole are regarded as a Markov process, which improves the modeling ability of complex dynamic systems. In the TMM, an auxiliary variable is introduced to completely describe the dynamic systems. This auxiliary variable can play a very significant role in some engineering applications. For example, it can characterize the uncertainty of parameters, non-stationarity and error sources. It has been proved that the TMM is more general than the HMM and the PMM, and it structural advantages make it more preferable in addressing some real-world applications, such as image segmentation (Derrode and Pieczynski (2004)), speech processing (Ait El Fquih and Desbouvries (2005)), target tracking (Zhang et al. (2017); Lehmann and Pieczynski (2020, 2021)), and so on.
For non-Gaussian noise, several approaches have been proposed, which are mainly divided into three categories (Izanloo et al. (2016)). The first is to replace the Gaussian distribution with a more extensive heavy-tailed distribution (Huang et al. (2017)). For example, the Student’s t distribution is one of the most commonly used heavy-tailed distribution. The main disadvantage of heavy-tailed distributions is that they are usually analytically difficult, which brings about that related estimation approaches have no closed form solution. The second is the multiple model technique. In this approach, non-Gaussian noise is represented as a finite sum of Gaussian distribution (Shan et al. (2021)). The main difficulty of this approach is how to design the model set reasonably, and the disadvantage is that the amount of calculation will increase sharply with the increase of the number of models. The third is the Monte Carlo approach, in which a set of weighted random particles are employed to characterize the state (Liu et al. (2018)). Generally, sampling-based algorithms can be categorized into deterministic sampling method and random sampling method. Particularly, in the random sampling method, enough particles can approximate the real state with arbitrary precision, at the cost of expensive computation.
In the past few years, the correntropy-based filtering technology has become an important orientation to solve the state estimation of dynamic systems with non-Gaussian noise (Kulikova (2017); Chen et al. (2017)). In information theory, correntropy is a significant mathematical tool to measure the similarity of two random variables. Unlike the commonly utilized MMSE cost function, which uses only second-order statistic of error, the correntropy captures second-order and higher-order information, and is more suitable for non-Gaussian noise, such as heavy-tailed impulsive noise. Several filtering algorithms based on correntropy have been designed in the framework of HMMs, and they are more robust to non-Gaussian noise than the KF and its variants.
In this paper, we are devoted to addressing the state estimation problem of linear dynamic systems with high-order autoregressive moving average (ARMA) non-Gaussian noise. A new Kalman-like filter is developed in the framework of the TMM based on correntropy. First, we resort to a linear TMM to describe dynamic systems with high-order ARMA noise, since the TMM is more general than the HMM. Second, based on the model, a new Kalman-like filter is derived by using correntropy cost function, instead of the commonly used MMSE cost function. Because correntropy can capture not only second-order but also higher-order statistics of error, the proposed algorithm is more robust to non-Gaussian noise than the traditional filter. Finally, simulation results show the effectiveness of the proposed algorithm.
The rest of the paper is organized as follows. Section 2 is the modeling of linear dynamic systems with high-order ARMA noise. Section 3 derives a new Kalman filter by using correntropy cost function in the framework of the TMM. In Section 4, we validate the proposed algorithm via simulations. Finally, conclusion is provided in Section 5.
2 Modeling of linear dynamic systems with high-order ARMA noise
2.1 Linear hidden markov model
Consider the following linear dynamic system
where k is the time index,
In general, noise sequences
2.2 Linear triplet markov model for dynamic systems with high-order ARMA noise
2.2.1 Linear triplet markov chain model
We resort to a linear TMM to describe a linear HMM with correlated noise. Let
where
2.2.2 Modeling high-order ARMA noise using TMM
In this section, we utilize a linear TMM to model dynamic systems with high-order ARMA noise (Zhang D. et al. (2021)). The TMM provides a general framework for these typical stochastic systems.
(1) High-Order ARMA Process Noise.
For high-order ARMA process noise, it can usually be written in the form of the following difference equation:
where
Suppose
where
Then, high-order ARMA process noise can be formulated by
If the process noise in model 1) is high-order ARMA noise, it can be described by model (6). In this case,
Assuming white noise
(2) High-order ARMA Measurement Noise.
For high-order ARMA measurement noise, it can also be written in the following form of difference equation
where
If the measurement noise in model 1) is high-order ARMA noise, it can be described by model (10). Let
Assuming white noise
(3) High-Order ARMA Process and Measurement Noises.
If the process noise and measurement noise are high-order ARMA noises, they can be described by model 6) and model (10), respectively. Let
Assuming white noises
2.3 Restoration algorithm
Let
where the initial state
For model 15) with (16), a Kalman-like filter, called triplet Kalman filter (TKF), has been derived to estimate the state
Initialization:
Prediction:
Update:
The TKF is also an optimal filter in the MMSE sense. It in general performs well in Gaussian noise. However, it performance will deteriorate or even diverge when applied to non-Gaussian systems, since the TKF is derived under MMSE criterion, which only uses second-order statistics of error. To solve this problem, in the next section, a new filter is developed by using correntropy cost function, which utilizes not only second-order but also higher-order statistics information.
3 Correntropy-based triplet kalman filter
3.1 Correntropy
Correntropy is a very useful metric tool to measure the similarity of two random variables in information theory (Chen et al. (2017)). For variables X and Y, the correntropy is defined by
where
There are many options for kernel function. In this paper, we choose the Gaussian kernel function
where σ is the kernel size, and
For the Gaussian kernel function, its Taylor series expansion can be written as
It can be seen that the correntropy is in essence the weighted sum of all even-order moments of error. Compared with the MMSE, which uses only the second-order statistics of error, correntropy captures the second-order and higher-order statistics.
3.2 Main results
In this section, a new filter, called correntropy-based TKF (CTKF), is derived by using correntropy under TMM. For clarity, we first provide the main results, and then give the mathematical derivation.
The initialization and prediction steps of the CTKF are the same as those of the TKF, and its update step is summarized as follows:
Proof. For the linear TMM (2), we have
where I and 0 are identity and zeros matrices, and
To address non-Gaussian noise, we use correntropy instead of MMSE to derive update equations. The cost function based on correntropy is established by
Then the optimal estimation of
Equation 41 can be written by
where
Adding and subtracting a term
Thus, the estimation of
where
Note that the parameter λk is function of
In addition, parameter σ plays an important role in correntropy-based filters. Inspired by (Kulikova (2017)), this paper adopts an adaptive method to choose σ, i.e.,
In this section, a CTKF is developed to address the estimation problem of dynamic systems with high-order ARMA non-Gaussian noise. Instead of the commonly used MMSE criterion, which uses only second-order statistics of error, correntropy is employed to derive the filter, since it can captures second-order and higher-order statistics of error. It can be seen that the structure of CTKF is similar to that of TKF, except that an extra scale parameter λk is involved. The scale parameter is computed according to correntropy criterion to control the gain matrix
4 Numerical simulations
In this section, two scenarios, i.e., dynamic system with high-order ARMA Gaussian and non-Gaussian noise, are taken into account to verify the effectiveness of the TMM and CTKF. In model (1), the state is
where T = 1 is the sampling period. The spectral factors of process and measurement noises are
Case 1:
where
Position and velocity RMSE results are provided in Figure 1. It can be seen that the TKF and SAKF have similar estimation performance, and are better than the standard KF. High-order ARMA process and measurement noises do not meet the independence assumption, resulting in poor estimation performance of the KF. The TKF and SAKF are essentially equivalent, and they are optimal in the MMSE sense. The former models dynamic system with high-order ARMA noise through TMM, and the latter deals with high-order ARMA noise through prewhitening technique. Simulation results show that TMM can accurately model dynamic systems with high-order ARMA noise.
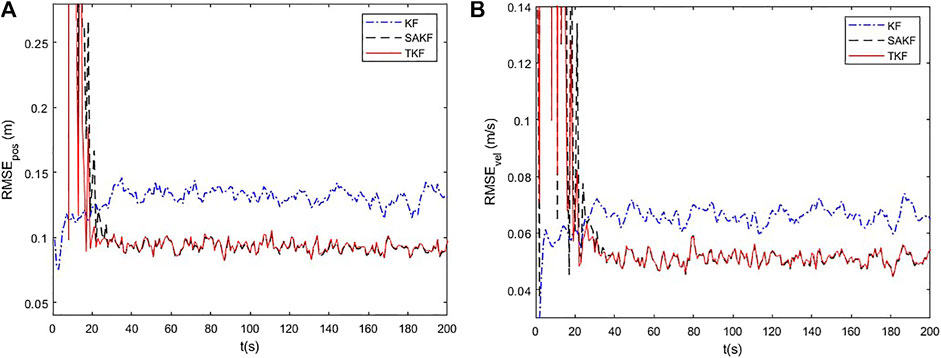
FIGURE 1. RMSE results for different filters. (A) Position RMSE. (B) Velocity RMSE.
Case 2:
For comparison, the TKF and the proposed CTKF are tested. Position and velocity RMSE results are provided in Figure 2. It can be seen that the CTKF performs better than the TKF. Non-Gaussian noise results in the poor estimation performance of the TKF, since it adopts the MMSE criterion, which uses only second-order statistic of error. The CTKF shows stronger robustness to non-Gaussian noise, because the adopted correntropy cost function can capture second-order and higher-order statistics of error. Simulation results show that the CTKF is an effective state estimation method for dynamic systems with high-order ARMA non-Gaussian noise.
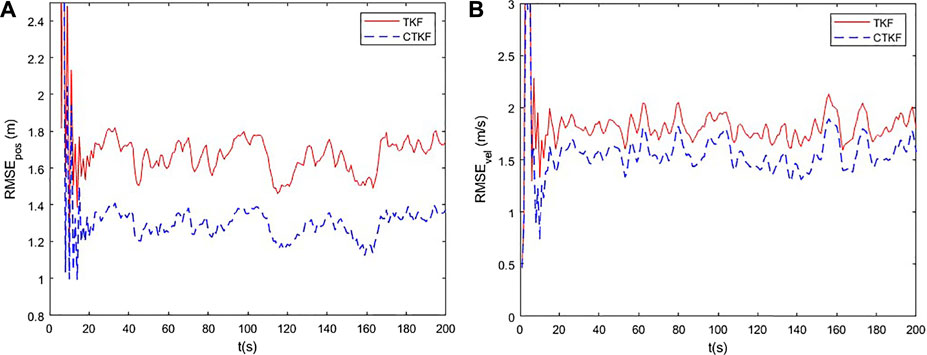
FIGURE 2. RMSE results for different filters. (A) Position RMSE. (B) Velocity RMSE.
5 Conclusion
In this paper, a new filter is designed to solve the state estimation problem of dynamic systems with high-order ARMA non-Gaussian noise. In this filter, high-order ARMA process and measurement noises are modeled in the TMM framework, and then the recursive algorithm is derived by using corretropy cost function. On the one hand, the TMM is more general than the HMM, and it can directly model dynamic systems with high-order ARMA noise. On the other hand, correntropy can capture second-order and higher-order statistics of error, and is more suitable for non-Gaussian noise than the MMSE cost function, which uses only second-order statistics of error. In addition, the CTKF has a simple form, which facilitates its practical application.
Data availability statement
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author.
Author contributions
GZ provided the idea of the work and organized the manuscript, LZ performed the experiment, FL provided revisions to this paper, XL designed experimental scenarios, and NF and SD conducted data analysis.
Funding
This work is supported by National Natural Science Foundation of China under Grants 62103318 and 62173266.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fenrg.2022.990267/full#supplementary-material
References
Ait El Fquih, B., and Desbouvries, F. (2005). “Kalman filtering for triplet Markov chains : Applications and extensions,” in IEEE International Conference on Acoustics, Speech and Signal Processing, ICASSP, Philadelphia, PA, USA, 685–688. vol. IV. doi:10.1109/ICASSP.2005.1416101
Ait-El-Fquih, B., and Desbouvries, F. (2006). Kalman filtering in triplet Markov chains. IEEE Trans. Signal Process. 54, 2957–2963. doi:10.1109/TSP.2006.877651
Bar-Shalom, Y., Li, X. R., and Kirubarajan, T. (2001). Estimation with applications to tracking and navigation: Theory, algorthims and software. New York: Wiley.
Chen, B., Liu, X., Zhao, H., and Principe, J. C. (2017). Maximum correntropy kalman filter. Automatica 76, 70–77. doi:10.1016/j.automatica.2016.10.004
Derrode, S., and Pieczynski, W. (2004). Signal and image segmentation using pairwise Markov chains. IEEE Trans. Signal Process. 52, 2477–2489. doi:10.1109/TSP.2004.832015
Huang, Y., Zhang, Y., Li, N., Wu, Z., and Chambers, J. A. (2017). A novel robust Student’s t-based kalman filter. IEEE Trans. Aerosp. Electron. Syst. 53, 1545–1554. doi:10.1109/TAES.2017.2651684
Izanloo, R., Fakoorian, S. A., Yazdi, H. S., and Simon, D. (2016). “Kalman filtering based on the maximum correntropy criterion in the presence of non-Gaussian noise,” in 2016 Annual Conference on Information Science and Systems, CISS, Princeton, NJ, USA, 500–505. doi:10.1109/CISS.2016.7460553
Kalman, R. E. (1960). A new approach to linear filtering and prediction problems. J. Basic Eng. 82, 35–45. doi:10.1115/1.3662552
Kulikova, M. V. (2017). Square-root algorithms for maximum correntropy estimation of linear discrete-time systems in presence of non-Gaussian noise. Syst. Control Lett. 108, 8–15. doi:10.1016/j.sysconle.2017.07.016
Lehmann, F., and Pieczynski, W. (2021). Reduced-dimension filtering in triplet markov models. IEEE Trans. Autom. Contr. 67, 605–617. doi:10.1109/TAC.2021.3050721
Lehmann, F., and Pieczynski, W. (2020). Suboptimal kalman filtering in triplet markov models using model order reduction. IEEE Signal Process. Lett. 27, 1100–1104. doi:10.1109/LSP.2020.3002420
Liu, X., Qu, H., Zhao, J., and Yue, P. (2018). Maximum correntropy square-root cubature kalman filter with application to SINS/GPS integrated systems. ISA Trans. 80, 195–202. doi:10.1016/j.isatra.2018.05.001
Pieczynski, W., and Desbouvries, F. (2003). “Kalman filtering using pairwise Gaussian models,” in IEEE International Conference on Acoustics, Speech, and Signal Processing, ICASSP 2003, Hong Kong, China, 57–60. doi:10.1109/ICASSP.2003.1201617
Roth, M., özkan, E., and Gustafsson, F. (2013). “A Student’s t filter for heavy tailed process and measurement noise,” in IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 5770–5774. doi:10.1109/ICASSP.2013.6638770
Saha, S., and Gustafsson, F. (2012). Particle filtering with dependent noise processes. IEEE Trans. Signal Process. 60, 4497–4508. doi:10.1109/TSP.2012.2202653
Shan, C., Zhou, W., Jiang, Z., and Shan, H. (2021). A new Gaussian approximate filter with colored non-stationary heavy-tailed measurement noise. Digit. Signal Process. 122, 103358. doi:10.1016/j.dsp.2021.103358
Zandavi, S. M., and Chung, V. (2019). State estimation of nonlinear dynamic system using novel heuristic filter based on genetic algorithm. Soft Comput. 23, 5559–5570. doi:10.1007/s00500-018-3213-y
Zhang, D., Duan, Z., Wang, P., and Zhang, Y. (2021a). “Spacecraft state estimation with multichannel higher-order ARMA colored noises,” in 2021 International Conference on Control, Automation and Information Sciences (ICCAIS) (Xi'an, China: IEEE), 602–607. doi:10.1109/ICCAIS52680.2021.9624490
Zhang, G. H., Han, C. Z., Lian, F., and Zeng, L. H. (2017). Cardinality balanced multi-target multi-Bernoulli filter for pairwise markov model. Acta Autom. Sin. 43, 2100–2108. doi:10.16383/j.aas.2017.c160430
Zhang, G., Lan, J., Zhang, L., He, F., and Li, S. (2021b). Filtering in pairwise markov model with Student’s t non-stationary noise with application to target tracking. IEEE Trans. Signal Process. 69, 1627–1641. doi:10.1109/TSP.2021.3062170
Zhang, G., Lian, F., Han, C., Chen, H., and Fu, N. (2018). Two novel sensor control schemes for multi-target tracking via delta generalised labelled multi-Bernoulli filtering. IET signal Process. 12, 1131–1139. doi:10.1049/iet-spr.2018.5124
Keywords: kalman filter, higher-order autoregressive moving average, non-Gaussian, triplet markov model, correntropy
Citation: Zhang G, Zeng L, Lian F, Liu X, Fu N and Dai S (2022) State estimation for dynamic systems with higher-order autoregressive moving average non-Gaussian noise. Front. Energy Res. 10:990267. doi: 10.3389/fenrg.2022.990267
Received: 09 July 2022; Accepted: 25 July 2022;
Published: 05 September 2022.
Edited by:
Hanlin Zhang, Qingdao University, ChinaCopyright © 2022 Zhang, Zeng, Lian, Liu, Fu and Dai. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Feng Lian, bGlhbmZlbmcxOTgxQG1haWwueGp0dS5lZHUuY24=