 Anders Lager1,2
Anders Lager1,2 Alessandro V. Papadopoulos
Alessandro V. Papadopoulos- 1Mälardalen University, Västerås, Sweden
- 2ABB AB, Västerås, Sweden
Modern industrial robots are increasingly deployed in dynamic environments, where unpredictable events are expected to impact the robot’s operation. Under these conditions, runtime task replanning is required to avoid failures and unnecessary stops, while keeping up productivity. Task replanning is a long-sighted complement to path replanning, which is mostly concerned with avoiding unexpected obstacles that can lead to potentially unsafe situations. This paper focuses on task replanning as a way to dynamically adjust the robot behaviour to the continuously evolving environment in which it is deployed. Analogously to probabilistic roadmaps used in path planning, we propose the concept of Task roadmaps as a method to replan tasks by leveraging an offline generated search space. A graph-based model of the robot application is converted to a task scheduling problem to be solved by a proposed Branch and Bound (B&B) approach and two benchmark approaches: Mixed Integer Linear Programming (MILP) and Planning Domain Definition Language (PDDL). The B&B approach is proposed to compute the task roadmap, which is then reused to replan for unforeseeable events. The optimality and efficiency of this replanning approach are demonstrated in a simulation-based experiment with a mobile manipulator in a kitting application. In this study, the proposed B&B Task Roadmap replanning approach is significantly faster than a MILP solver and a PDDL based planner.
1 Introduction
With the introduction of stationary and mobile robots in collaborative settings (Ajoudani et al., 2018), robots need a more sophisticated autonomous behaviour to handle an increasingly dynamic environment both safely and efficiently. Robots must be capable of dealing with such uncertainty at runtime, without impacting too much on their expected productivity. The path planning problem has been extensively discussed in the literature (Kavraki et al., 1996; Mac et al., 2016; Costa and Silva, 2019; Mannucci et al., 2019; Tajvar et al., 2020) as one important aspect to be able to guarantee a safe operation of the robot, and avoid collision with humans, robots, or other unexpected objects present in the environment. However, an efficient feasible path may not be easy to find at runtime, e.g., due to physical constraints of the environment, and the robot may need to stop waiting for the path to be cleared or make an extended detour. Whenever an unforeseeable event is perceived, e.g., the robot path is not cleared, or a task exception occurs, a task replanner can re-assign the sequence of tasks to the robot to keep its productivity high (Lager et al., 2019).
In this paper, we propose a task planning approach for industrial robots and service robots, called Task Roadmaps (TRM), that can be used for replanning the robot’s task allocation at runtime. The approach is inspired by Probabilistic Roadmaps (Kavraki et al., 1996), as it uses a similar idea to speed up the replanning of tasks at runtime. An initial plan may be generated offline while replanning is an online activity that has a direct impact on productivity, as well as the perceived reactive responsiveness of a robot.
In this work, the TRM approach is applied to a robot application modelled in the form of a Robot Task Scheduling Graph (RTSG). RTSG is an intuitive graph-based task modelling formalism for robot applications in dynamic environments that was proposed in our previous work (Lager et al., 2021). An RTSG model can be converted to a mathematical representation of the related task scheduling problem as a Mixed Integer Linear Programming (MILP) problem. The solution of the MILP problem provides the execution sequence of tasks to complete the mission with a minimized makespan. Additionally, an RTSG model can be converted to a domain and problem description in the Planning Domain Definition Language (PDDL), allowing for the scheduling problem to be solved by planners compatible with this format.
Unfortunately, the MILP formulation is an NP-hard problem (Miloradović et al., 2020; Miloradović et al., 2021), and computing a solution can be time-consuming. Compared to MILP solvers, PDDL based planners tend to be more efficient for RTSG models with more constraints but less efficient for models with fewer constraints (Lager et al., 2021).
In this paper, we propose the concept of TRM and present a Branch and Bound (B&B) algorithm to solve the very same scheduling problem described above while generating a reusable planning space (a task roadmap). Whenever replanning is needed, the B&B algorithm can leverage the planning space, which will speed up the replanning time considerably. This usage scenario of the algorithm is referred to as B&B-TRM.
In a simulation-based experimental study, we compare the replanning performance for a MILP solver, a PDDL planner, B&B, and B&B-TRM in a kitting application with a mobile manipulator. The experiments show a significant reduction of task replanning time with B&B-TRM compared to the other approaches, while providing equivalent solutions in terms of cost.
The remainder of this paper is organized as follows. Section 2 presents related works, Section 4 gives an introduction to the task modelling formalism, RTSG, and the general scheduling problem. Section 4 details the scheduling problem formulation as a MILP, Section 5 shows how RTSG can be converted to PDDL. Section 6 introduces Task Roadmaps, exemplified with a B&B scheduling algorithm for RTSG models. Section 7 presents the experimental results, while Section 8 concludes the paper.
2 Related Work
Some replanning approaches make a new plan from scratch when an unexpected condition occurs, e.g., see the work by Weser et al. (2010). This is a solid approach for high-quality plans but often at a high price of computational time for large problem instances. Moreover, our approach essentially makes a replanning from scratch but in addition, it leverages the search space generated to find the initial plan, thereby reducing the planning time.
Other approaches try to reuse the initially generated plan, modifying parts of it to adapt to unexpectedly changed or more refined conditions. The purpose can be to locally optimize the initially planned sequence, e.g., with rule-based transformational planning (Kazhoyan et al., 2020) or by rearranging subgoals at runtime using Hierarchical Planning (Hadfield-Menell et al., 2013). The purpose can also be to repair a plan, e.g., by making a rule-based rearrangement of operations (Lou et al., 2012). This way of replanning can be more simple and efficient than replanning from scratch, but the quality of a modified plan may become less optimal or invalid (McDermott, 1992). A sophisticated variant of this approach creates an adaptable and partially ordered initial plan, having an online algorithm generating a set of completely ordered plans and dispatching the one with the best chance for success given the current state (Lima et al., 2020).
The Traveling Salesperson Problem (TSP) with Precedence Constraints (PCs) with a fixed starting- and endpoint is a special case of the scheduling problem for RTSG models targeted in this work. RTSG models additionally include alternative sequences and interrupt locks. One example of a TSP-PC problem instance is TSP with pickup and delivery (Dumitrescu et al., 2009). Recently, a dynamic programming approach to solve TSP-PC dating back to 1979 was revisited (Salii, 2019). In this approach, which is akin to our proposed B&B (that uses a breadth-first and forward search approach), the algorithm starts from an empty set of nodes and uses an expansion operator to select the order-theoretic minimal of the remaining nodes in every iteration.
3 Task Modelling Formalism and Scheduling Problem Formulation
In this section, RTSG, the task modelling formalism used in this paper, is presented. This is followed by a description of the task scheduling problem and related assumptions.
3.1 Robot Task Scheduling Graph
An RTSG is a directed acyclic graph, as exemplified in Figure 1. The graph is composed, e.g. by a domain expert, to specify the variability of a task sequence from a start node (S) to a goal node (G) that will achieve a higher-level goal, e.g., to fetch and deliver a selection of different objects from a warehouse. S has one outgoing edge and G has one incoming edge. Intermediate nodes in rectangular form represent tasks that may be executed in a scheduled sequence to reach the goal. Tasks have one incoming and one outgoing edge and represent robot actions at different locations in the environment, e.g. the fetching of an object. Edges and paths (of edges) represent precedence constraints. For example, if there is a directed path from task A to task B, then task A must precede task B in any schedule where both A and B are present. The remaining nodes, with a circular shape, are logical nodes that guide the variability of the task sequence. These are intuitively described in the next Sections 3.2–3.4
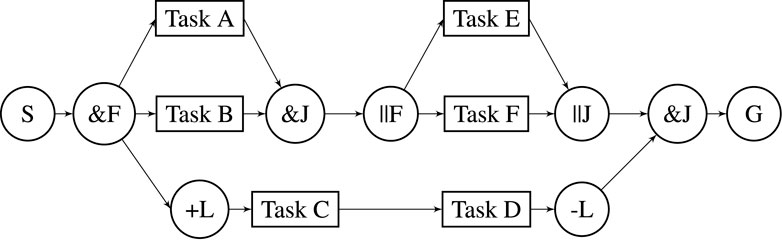
FIGURE 1. Robot task scheduling graph.
3.2 AND-Pairs
An AND-pair is an AND-Join node (&J) and a corresponding preceding AND-Fork node (&F). The AND-Fork node has a single incoming edge and multiple outgoing edges, while the AND-Join node has multiple incoming edges and a single outgoing edge. AND-pairs split a single branch into parallel branches at the AND-Fork node (&F) and rejoin them at the AND-Join node (&J).
The function of AND-pairs is to indicate more complex precedence constraints by being able to fork and rejoin branches. The mutual scheduling order of tasks in different parallel branches is variable since there is no directed path between them. Additionally, tasks in these branches must be scheduled before any task succeeding the AND-Join node.
3.3 OR-Pairs
An OR-pair is an OR-Fork node and a corresponding succeeding OR-Join node. The OR-Fork node has a single incoming edge and multiple outgoing edges while the OR-Join node has multiple incoming edges and a single outgoing edge. An OR-pair contains alternative branches of tasks, where at most one of them will be scheduled. If an OR-pair is contained by another OR-pair, it is said to be internal, otherwise, it is external. For an external OR-pair, one of its contained branches will be scheduled. For an internal OR-pair, one of its branches will be scheduled if the OR-pair is a part of a scheduled branch.
3.4 Lock-Pairs
A Lock-pair is an +L node and a corresponding succeeding -L node. These nodes have a single incoming edge and a single outgoing edge. The sub-graph between a Lock-pair must be scheduled uninterrupted by externally located tasks.
3.5 The Task Scheduling Problem
The problem to solve is to generate a sequence of tasks that minimises the cost to achieve the goal in a way that satisfies the constraints of the given RTSG model. Apart from the sequencing of tasks, a selection of alternative tasks is generally included in the scheduling problem. The cost to be minimized includes routing costs implicated by the task sequence selection.
It is a deterministic, single robot scheduling problem with non-concurrent tasks, where the task allocation type is a time extended assignment (Gerkey and Matarić, 2004). The state is fully observable at planning/replanning.
Targeted replanning scenarios handle unexpected states that are blocking or delaying the progress of task execution. They include the considering of obstacles that are obstructing the execution of the initially planned path/route or blocking the access of planned task locations. Additionally, they may include unexpected circumstances affecting the time to execute a task, e.g., when the robot needs to pick an object from a shelf location, and there are no objects in the box; the box will be eventually refilled, e.g., by a human but the completion of the task is affected by an unexpected duration. As a consequence of the replanning scenario, the cost for the initially planned sequence may increase and in the extreme case make it impracticable. The transition cost may become changed between many tasks and not only affect the currently running task or its successor. After rescheduling, the order of tasks to be executed may be changed or remain. Additionally, alternative tasks may become replaced.
Replanning for an unexpected adding of sub-goals, requiring a structural modification/extension of the RTSG model, is not investigated in this work. However, the removal of modelled sub-goals may be handled, e.g., by penalizing the cost for related tasks or with a selective pruning by the proposed B&B algorithm.
The computational complexity of the RTSG scheduling problem depends on the structure of the graph. As a simplistic example, the RTSG can be used to model two alternative branches of totally-ordered sequences of actions encapsulated by an OR-pair. The solution to this problem can be solved in polynomial time. On the other hand, RTSG can also be used to model a Traveling Sales Person problem (TSP). This is a problem that is known to be NP-hard (Grefenstette et al., 1985) indicating the general RTSG problem is at least NP-hard.
A planner supporting temporal PDDL may be used to address problems of harder complexity classes than NP, e.g. a temporal plan existence problem may be EXPSPACE-complete (Rintanen, 2007). Rintanen shows that a significant fragment of temporal PDDL planning problems can be reduced in polynomial time to classical planning with a complexity class of PSPACE. The requirements for this reduction include no overlapping of the same action and state-independent action duration. However, RTSG planning problems have state-dependent action durations. Classical domain-independent planning languages do not support state-dependent cost. However, it might be possible to reduce the problem into a classical problem by generating a manifold of fixed-cost actions (Geißer et al., 2015). The modelling approach in this work is not based on a standardized format, e.g., classical PDDL, which is too limited for the approach. Instead, it uses the native SAS+ format (Bäckström and Nebel, 1995). Despite the improvements suggested by Geißer et al., these conversions will in the worst case grow exponentially. The combination of these drawbacks for the usage of classical planners motivated the selection of a temporal PDDL planner as one of the benchmarks in this study.
4 Mixed Integer Linear Programming Representation
The task scheduling problem can be formulated as a Mixed Integer Linear Programming (MILP) problem where the decision variables and the constraints are derived from the RTSG model. The optimization objective is to minimize a cost function, e.g., in the form of a total completion time. The MILP problem formulation is detailed in this section.
4.1 Notation
4.2 Problem Formulation
The problem that needs to be solved is to select a set of tasks within
Note that
The cost for selecting a transition between task
The optimization problem aims to minimize the following cost function:
4.3 General Constraints
The minimization problem is subject to the following constraints.
4.4 Lock-Pair Definitions and Constraints
A Lock-pair contains a set of tasks,
The constraints associated with Lock-pairs restrict transitions from/to tasks contained by the pair. There can at most be one transition from external tasks to the first tasks, and at most one transition from the last tasks to external tasks:
4.5 OR-Pair Definitions and Constraints
The OR-pair constraints presented in this section can handle OR-Pairs inside OR-Pairs etc., in a recursive manner. To express the OR-pair constraints we first need to prepare some supporting definitions and operators:
An OR-pair contains a set of OP nodes, where an OP node is either a task node or an internal OR-pair. In the same way, internal OR-pairs contain OP nodes etc.
Formally,
One primary OP-node,
With these definitions, the OR-pair constraints can be summarized:
4.6 Replanning Constraints
In dynamic environments, some unforeseeable events may make the initially computed plan not possible to execute. To complete the robot mission, a replanning can be initiated. Such a replanning can, besides changing the order of tasks, exploit other OR-pair branches of the RTSG to successfully complete the mission in an alternative way. On the other hand, if one or more tasks in an OR-pair branch are already completed, the remaining tasks in this branch will also become scheduled in the new plan. For replanning, one needs to introduce additional constraints to account for completed tasks, and for capturing the changed situation that hinders the completion of the initial plan. The set
Further, the costs for possible transitions between tasks,
5 Planning Domain Definition Language Representation
PDDL is a general domain-independent modelling formalism for setting up planning problems, originating from classical planning (Fikes and Nilsson, 1971). It is used to define planning problems in many areas, also outside the field of robotics. Planning problems that are represented in a PDDL format can be solved by many different planner algorithms, e.g., Temporal Fast Downward (TFD) (Eyerich et al., 2009) and POPF2 (Coles et al., 2011). Since an RTSG model can be converted to a PDDL planning problem (Lager et al., 2021), many different planner algorithms are available. One of these, TFD, is used in this work as a benchmark. The reason for selecting TFD was it is ability to find high quality solutions in comparison with other planners/solvers in our previous work (Lager et al., 2021). For compatibility, planners need to support some parts of PDDL2.1 (Fox and Long, 2003) that extends PDDL with syntax for temporal planning.
5.1 Planning Domain Definition Language Introduction
A PDDL problem specification is divided into a domain description and a problem description. In the domain description, definitions are made that can be reused for similar planning problems. The most basic definitions include:
A basic PDDL problem description includes:
The task of a planner algorithm is to process the domain and problem description and find a sequence of applicable actions operating on the existing objects, that will change the initial state to a state where the goal state is fulfilled. This plan generation process is not investigated here. Instead, details are presented on how to convert the RTSG task modelling formalism into PDDL, thereby enabling plan generation with already existing planner algorithms.
5.2 Conversion From Robot Task Scheduling Graph to Planning Domain Definition Language
In general, when converting an RTSG model to a PDDL specification, the RTSG nodes become objects and the edges become facts. Two types of PDDL actions are defined:
5.2.1 A Planning Domain Definition Language Domain for Robot Task Scheduling Graph
Listing 1 presents a PDDL domain for a general RTSG. The domain is almost independent of the RTSG model that shall be converted.
Listing 1:. PDDL domain
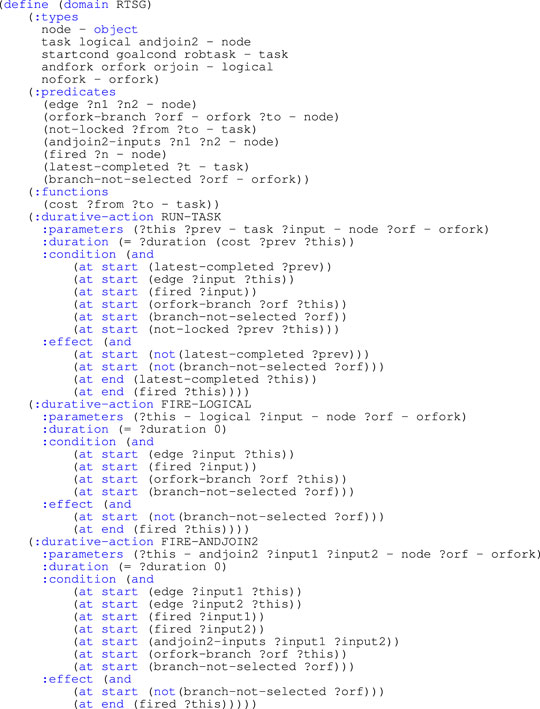
All object types are derived from the node type, and are used to represent nodes in an RTSG model. There are two types of node: task and logical. task represents actions or states that affects the cost of a plan: startcond, goalcond and robtask. logical represents different types of logical nodes: andfork, orfork and orjoin. Different andjoin types are defined for each number of incoming edges that needs to be represented in the RTSG model. For example, andjoin2 represents an AND-Join with two incoming edges. A nofork object is a dummy object that helps in the modelling of alternative branches. Lock-pair nodes are not represented by object types; instead their constraints are modelled with not-locked facts.
Among the static predicates, that cannot be affected by any action, edge represents an edge between two nodes. orfork-branch specifies the outgoing connection from an OR-Fork to another node. not-locked specifies if a transition between two tasks is not locked. The other predicates are dynamic and can be created or removed by actions: fired specifies if a node (task or logical) is completed. latest-completed specifies if a task is the latest completed task. branch-not-selected specifies if an alternative branch for an OR-Fork not has been selected.
There are two types of actions: to run a task and to fire a transition for a logical node. There is one action that runs all tasks, i.e. RUN-TASK. There are a limited number of actions for logical nodes, i.e. FIRE-LOGICAL to run transitions for all non AND-Join nodes, FIRE-ANDJOIN2 for transitions of AND-Joins with two incoming edges, FIRE-ANDJOIN3 for 3 incoming edges etc. Additional AND-Join actions must only be defined if they exist in the RTSG model.
Running a task has a duration and the duration is represented by a cost function that specifies the cost of performing a task (to) after completing another task (from). The preconditions require that the node connected to the incoming edge has been fired. If this connected node is an OR-Fork, it is required that a branch not yet has been selected. It is also required that a transition from the latest completed task not is locked. The effects update the dynamic predicates: The task becomes both fired and the latest-completed. The branch-not-selected is removed for the task’s orfork.
Fire a transition for a logical node has a zero duration, i.e., free of cost. The preconditions require that the node connected to the incoming edge has been fired. If this connected node is an OR-Fork, it is required that a branch not yet has been selected. The effects update the dynamic predicates: The logical node becomes fired and the branch-not-selected is removed for the logical node’s orfork. For an AND-Join action, the preconditions additionally require every node connected to the incoming edges to be fired.
5.2.2 A Planning Domain Definition Language Problem for an Robot Task Scheduling Graph Model
Listing 2 exemplifies a PDDL problem description at initial planning, that is converted from the RTSG model in Figure 1. Some of the data in the conversion are left out, indicated with ’
Listing 2.. PDDL problem
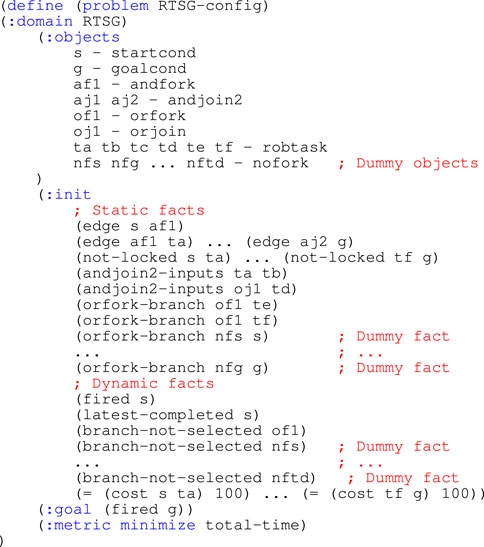
The objects and the static facts listed in the PDDL problem are dependent on the structure of the RTSG model.
Objects are defined for all nodes in the RTSG graph except for Lock-pair nodes. Additionally, nofork objects are created for all nodes that do not have an incoming edge from an OR-Fork node. noforks are dummy objects assisting in the selection of alternative OR-Fork branches.
Static facts are created to represent the structural elements of the RTSG model. The edges are represented with edge facts that specify connected nodes. However, edges to/from Lock-Pair nodes are bypassed. not-locked facts are created for each valid transition between two tasks, with respect to precedence constraints as well as Lock-pair constraints. For each AND-Join node, an andjoinX-inputs fact is created that specifies all nodes connected to its X incoming edges. For each node connected to the outgoing edge of an OR-Fork node, an orfork-branch fact is created indicating this orfork. For all other nodes, an orfork-branch fact is created indicating their nofork object.
Dynamic facts are created to represent all possible intermediate states of a task execution sequence. A fired fact is added for all completed nodes. For the initial state, as illustrated in Listing 2, there is only a single fired fact for the start node. At replanning, a fired fact is additionally added for all completed tasks and for the logical nodes that precede completed tasks. A single latest-completed fact specifies the latest completed task. At initial planning, the start node is always the latest-completed, while this may have changed at replanning. For the initial plan, a branch-not-selected fact is created for each orfork and nofork. At replanning, these facts are removed if the orfork has a fired fact or if the node that is connected to the nofork has a fired fact.
Finally, the numerical cost value for all not-locked transitions between tasks is specified. In a replanning scenario, these values may become changed by the current state of the modelled application.
The required goal state is a fired fact for the goal object. The objective of the plan, the metric, is to minimize the makespan.
6 Task Roadmaps
We developed a Branch and Bound (B&B) algorithm, to compute solutions of scheduling problems modelled with RTSG as detailed in Section 4. The algorithm makes a breadth-first expansion of a search tree. It is a forward search that is guided from the start node of the RTSG model. When replanning is needed, the algorithm is designed to make a new plan while considering the current conditions, e.g., the location of the robot and the sequence of already completed tasks. Optionally, the search space that was constructed while generating the initial sequence can be reused. This option avoids the need of expanding a new search space from scratch, making the replanning significantly faster with preserved quality of generated plans.
In analogy with Probabilistic Roadmaps (Kavraki et al., 1996), the search space is referred to as the Task Roadmap (TRM) that is created in a learning phase and used for runtime replanning in a query phase. In Table 1, we compare the basic characteristics between Probabilistic Roadmaps (PRM) and TRM.
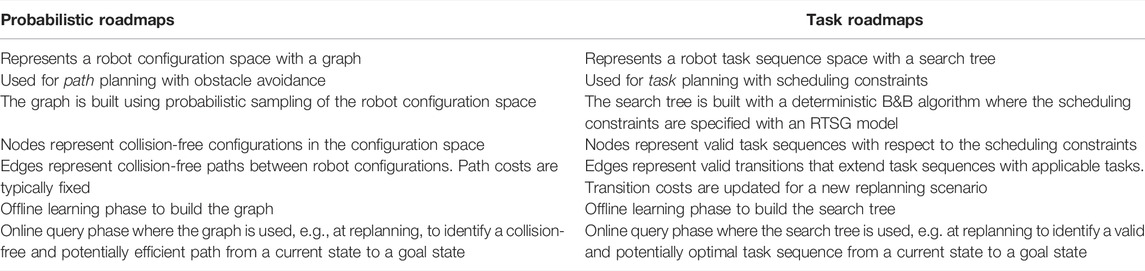
TABLE 1. Similarities of the basic characteristics for Probabilistic Roadmaps and Task Roadmaps, respectively.
Additionally, a saved Task Roadmap may be leveraged to speed up initial planning for an RTSG model if it has the same graph structure as the model used to generate the Task Roadmap.
6.1 Learning Phase
In the learning phase, a search tree is expanded by the B&B algorithm acting on a Robot Task Scheduling Graph (RTSG) to find an initial task sequence.In the search tree, see Figure 2, the initial start condition is represented by the root node
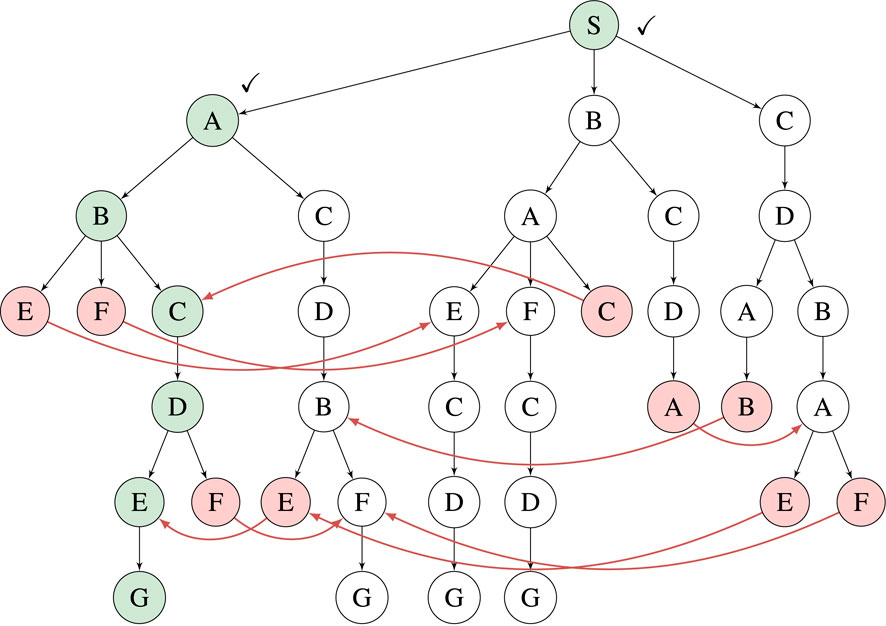
FIGURE 2. Visualization of a B&B search tree for the RTSG model in Figure 1. This expanded search tree makes up the Task Roadmap. The initial task sequence is marked in green and completed nodes have a checkmark. Pruned nodes are red and have red pruning edges.
6.2 Query Phase
At a point of replanning, the world is in a new state where the robot has completed 0 to
The query phase is divided into 2 steps:
1) The first step is to identify the current node of the search tree. This is the node that represents the sequence of already completed tasks. If no tasks have been completed, the root node becomes the current node.
2) The second step is to find the most efficient task sequence between the current node and a goal-reaching node in the search tree. In this step, pruning edges are leveraged to explore nodes without children.
When replanning is made while reusing an existing search tree, we will refer to this method as B&B-TRM. And when replanning is made from scratch with a single and non-expanded root node, we will refer to this method as B&B. The memory required for replanning with B&B-TRM is always the same amount as required by B&B to find the initial task sequence in the learning phase and create the Task Roadmap. Replanning with B&B will in worst case require the same amount of memory as B&B-TRM, i.e., if no tasks are completed. If some tasks are already completed the memory need becomes reduced due to the smaller problem size. Both methods are realized with the same algorithm. This algorithm takes as input a list of already completed tasks. It also needs cost estimates for actions and transitions with respect to the current state. The search starts from the root node, which may be an initial single node or the top node of an existing search tree. It is a breadth-first search where any existing children are reused instead of being created while expanding the search. It is pruning all nodes in the first generation except the one that matches the first completed task. Then all nodes in the second generation are pruned except the one that matches the second completed task etc. This goes on until the current node is reached. From this node and onwards, only equivalent nodes are pruned. If an expansion is required from a node without children, the algorithm will look for a peer of the node. If no peer is found (e.g., since the algorithm is run without a TRM), all applicable children of the node are identified by a search of the RTSG and created. If instead a peer is found, the peer’s children are adopted by this node. If the peer lacks children, the peer’s peer’s children are adopted etc. These adopted children are top nodes of sub-trees that are disconnected from the peer and reconnected to the new parent node. The cost of all reused children adopted or previously existing, need to be updated to consider the new cost of the parent. The search continues until the goal is reached in all active (non-pruned) search nodes. Finally, the goal-reaching node with the lowest cost is identified.
Due to the exchange of subtrees between peers, each replanning will potentially modify the structure of the search tree. However, no information is lost that is required for later replanning. The significant reduction of planning time from reusing nodes comes from 1) removing the process of searching the RTSG to find possible search tree propagations and 2) removing the process of creating nodes from scratch.
6.3 B&B and B&B-TRM
A pseudo-code for B&B and B&B-TRM is given in Algorithm 1.
Algorithm 1:. B&B and B&B-TRM.

The algorithm starts at the ScheduleTasks function. It takes as input arguments a root node and a list of already completed tasks. The root node keeps the starting conditions for planning, e.g., the current location of the robot. At initial planning, the root node does not have any children. After completing the initial planning, it has been expanded to a search tree. At replanning, the expanded root node can be used as an input argument to ScheduleTasks, thereby speeding up the planning time. This usage scenario is referred to as the B&B-TRM algorithm. If instead a non-expanded root node is used, the search tree will be generated from scratch, which is referred to as the B&B algorithm.
ScheduleTasks runs a loop where a new generation of nodes is fully explored in every cycle, starting from the root node. From each generation, any goal-reaching nodes (sequences) are collected. The loop continues until no more generations can be explored. Finally, ScheduleTasks returns the goal-reaching sequence with the lowest cost. For each explored generation, pruning is made among equivalent nodes (in the algorithm referred to as
To explore a new generation, the recursive GetGeneration function is used. The first argument,
7 Results
7.1 Use Case
The use case is a kitting application in a warehouse. A mobile manipulator shall deliver kit boxes filled with several specified objects to a delivery station. Objects and empty kit boxes are located on 5 different shelves in a simple warehouse as illustrated in Figure 3.
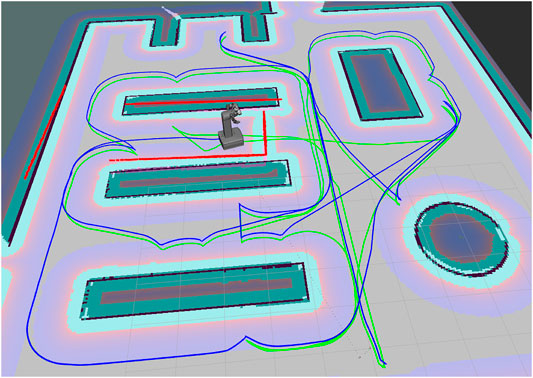
FIGURE 3. Warehouse layout. The light green path, starting and ending at the bottom right, is the initial route for Scenario (B). The robot has stopped in front of an obstacle that is blocking the initially planned movement. The red lines along the shelves, the wall and the obstacle indicate the objects perceived by the robot’s laser scanner. A replanned route in blue, starting at the robot’s location, has changed the order of the remaining tasks.
The robot can carry 2 kit boxes and fill them in parallel. The process to deliver the kits is divided into 5 phases: Fetch empty kit boxes, Fetch layer 1, Fetch interlayer, Fetch layer 2, and Deliver kits. There are two types of tasks: The first is to load empty kit boxes, and the second is to fetch an object to a carried kit box. Three different scenarios (A, B and C) are modelled with RTSG, see Figures 4–6. Task names, e.g.,

FIGURE 4. RTSG representation of Scenario A.
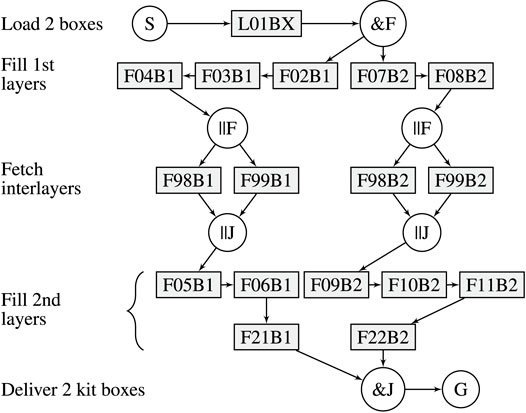
FIGURE 5. RTSG representation of Scenario B.
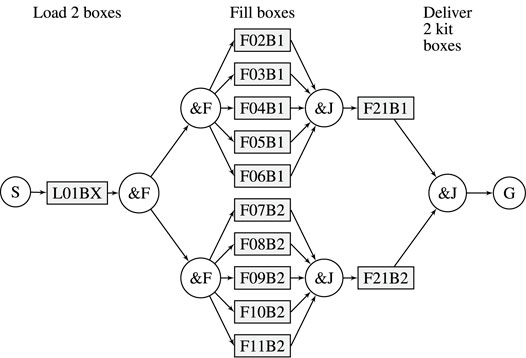
FIGURE 6. RTSG representation of Scenario C.
When converting the three scenarios to MILP problem formulations, the number of variables and constraints are indicated in Table 2. Additionally, some lazy constraints are added dynamically when required for Eqs. 7 and 8 while running the MILP solver. The theoretical number of constraints for these equations can be very high and defining them all may not be viable.
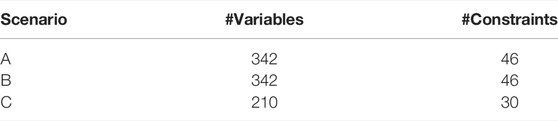
TABLE 2. Variables and constraints for the MILP problem formulations.
7.2 Experimental Setup
The simple warehouse world is modelled with the Gazebo simulator (Koenig and Howard, 2004). This includes the shelves, the mobile robot and an obstacle that may interfere with the robot path. ROS Navigation Stack (Guimarães et al., 2016) is used to navigate the robot between different locations. The navigation is guided by a 2D map of the warehouse that initially does not include the obstacle. While navigating, the robot simultaneously maps changes in the simulated world with respect to the map.
The benchmarked planners include the proposed B&B and B&B-TRM algorithms, a MILP solver (Gurobi Optimization, 2021) and Temporal Fast Downward (TFD) (Eyerich et al., 2009) which is a PDDL based temporal planner. An initial task sequence is generated from the RTSG model with B&B, MILP and TFD. Additionally, B&B generates a task roadmap that is reused by B&B-TRM in all replanning experiments. The transition costs between tasks are represented by the collision-free path lengths generated with the Dijkstra algorithm from the initial map. The initial task sequence corresponds to a route in the warehouse that starts and ends at the same location. In the simulation-based replanning experiments, the robot navigates the initially computed route, which turned out to be the very same route for all planners, while simultaneously mapping the environment with a simulated laser scanner. When the first task is reached, the next task is dispatched etc. During the progress of the plan execution, the planned motion to the next task becomes blocked by the obstacle at randomized locations along the path. The part of the obstacle that is visible from the robot while approaching it and stopping a short distance nearby (1–1.5 m), becomes included in the map. A replanning is initiated from a randomized location of the robot in front of the obstacle on the planned path. For this purpose, the initial planning problem is updated to become a replanning problem, considering already completed tasks, the robot’s (randomized) current location and updated transition costs caused by the updated map. Depending on the location of the obstacle and its effect on collision-free path lengths between tasks, the replanned routes may change or keep the sequence of tasks. Replanning may fail if the location of the obstacle blocks a planned task when there are no alternative tasks. If a collision-free path can not be found between two tasks, the transition cost is penalized to a very high value that will help to detect a failed plan. All replanning scenarios were run with the benchmarked planners, including B&B-TRM and B&B (without the TRM). The number of already completed tasks at replanning,
7.3 Experimental results
Figure 7 shows the experimental results for the four planner algorithms, i.e., B&B, B&B-TRM, TFD and the MILP solver. The graphs show the minimum, the median, and the maximum replanning time for the four algorithms, as a function of the number of completed tasks
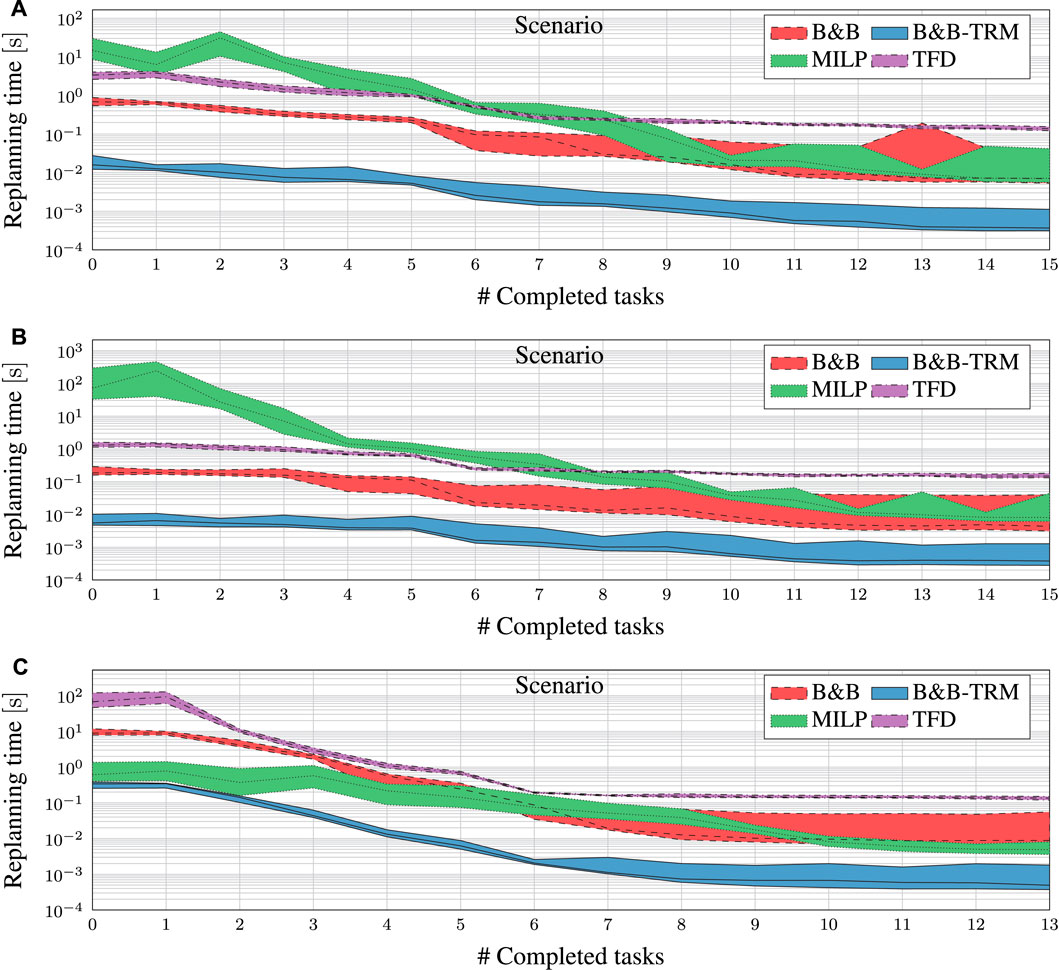
FIGURE 7. Replanning time for B&B (dashed area), B&B-TRM (solid area) and MILP (dotted area) at different task completion levels. The central line in each area indicates the median. Note that the vertical axis is logarithmic.
For each experiment in all scenarios, B&B-TRM and B&B reach the very same objective value as the solution computed by the MILP solver, suggesting that the proposed algorithms may be optimal. However, further investigation on the optimality of the proposed algorithms is needed. TFD also reaches the very same objective values in all experiments. The replanning time for B&B-TRM is less than 1 s (and often a fraction of that) for all scenarios. As expected from B&B-TRM essentially being a reduced version of B&B, it outperforms B&B in every scenario by an average factor of 26. The factor tends to increase slightly for scaled-up problem instances with fewer completed tasks.
B&B-TRM outperforms the MILP solver in Scenario A by a factor greater than 152 for the largest problem instances
B&B-TRM outperforms TFD by a factor greater than 149 for all
Finally, it is worth noticing that both the B&B-TRM approach and TFD provide a more predictable performance than MILP, highlighted by the limited variability (standard deviation) of the replanning time.
7.4 Scalability Investigation
As discussed in Section 3.5, the complexity of the scheduling problem depends on the structure of the graph. It is assumed that the scalability of the presented algorithm also depends on this structure, and how the graph is scaled. In order to investigate how the algorithm may scale for growing problem sizes, an experiment was setup targeting the graph in scenario A. The size of this graph was modified in different steps. For each problem size, memory consumption and replanning time were measured. The number of tree nodes in the Task Roadmap are used to represent memory consumption. All replanning times were measured at random locations before completing the first very task, which is the worst case. Scenario A was scaled in two ways, 1) by changing the number of tasks in each layer of the kit boxes (Figure 8ab), by changing the number of layers in the kit boxes (Figure 8B). Both scaling scenarios indicate an exponential growth of the memory consumption, but at different rates where scaling the number of layers is more advantageous. Scaling the number of layers introduces a lot of precedence constraints, while the scaling of layer sizes introduces very few. The B&B-TRM replanning times are within a few seconds for the included problem sizes. The scalability experiments confirms that memory consumption may be a limitation for the algorithm in some scenarios. Especially for less constrained, scaled up problem scenarios.
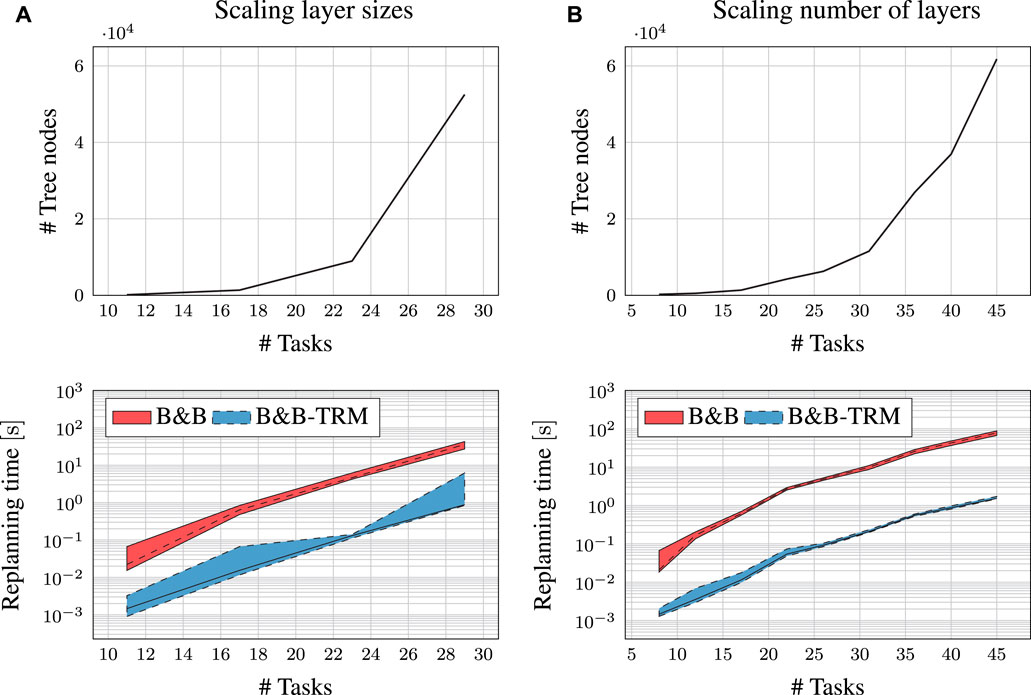
FIGURE 8. Scalability experiments for Scenario A. ‘#Tasks’ indicates the number of tasks in the RTSG. ‘#Tree nodes’ indicates the number of nodes in the Task Roadmap search tree.
8 Conclusion and Future Work
We have proposed the concept of Task Roadmaps (TRM) and shown that it is a promising strategy to speed up online replanning of robot tasks, thereby contributing to improved productivity in a dynamic environment. We have presented a strategy to implement Task Roadmaps, using a Robot Task Scheduling Graph to model a robot application, Branch and Bound (B&B) for initial planning and B&B-TRM for replanning. The benefits, as well as the limitations for this strategy, have been investigated in an experimental study where a MILP solver and a PDDL based planner have been used as benchmarks.
Future work will address the combining of different replanning strategies with the modelling and runtime observation of disturbance behaviours. Another interesting extension is to widen the scope to multi-robot task allocation and scheduling.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Author Contributions
AL conceived the presented idea, developed the theory, and performed the experiments. AP and GS encouraged AL to investigate how to improve replanning scenarios for the B&B algorithm. GS conceived the idea to investigate the synergies of the replanning concept with Probabilistic Roadmaps. AP, GS, and TN supervised the findings of this work. All authors discussed the results and contributed to the development of the final manuscript.
Funding
This work was funded by The Knowledge Foundation (KKS), project ARRAY (Project number: #20170214), and by The Swedish Foundation for Strategic Research (SSF), project FuturAS (Project number: SM20-0035).
Conflict of Interest
Author AL and GS were employed by ABB AB.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Ajoudani, A., Zanchettin, A. M., Ivaldi, S., Albu-Schäffer, A., Kosuge, K., and Khatib, O. (2018). Progress and Prospects of the Human-Robot Collaboration. Auton. Robot 42, 957–975. doi:10.1007/s10514-017-9677-2
Bäckström, C., and Nebel, B. (1995). Complexity Results for SAS+Planning. Comput. Intell 11, 625–655. doi:10.1111/j.1467-8640.1995.tb00052.x
Coles, A., Coles, A., Clark, A., and Gilmore, S. (2011). “Cost-sensitive Concurrent Planning under Duration Uncertainty for Service-Level Agreements,” in Proceedings of the 21st International Conference on Automated Planning and Scheduling, ICAPS 2011, Freiburg, Germany, June 11-16, 2011.
Costa, M. M., and Silva, M. F. (2019). “A Survey on Path Planning Algorithms for mobile Robots,” in 2019 IEEE Int. Conf. On Autonomous Robot Systems and Competitions (ICARSC) (IEEE), 1–7. doi:10.1109/ICARSC.2019.8733623
Dumitrescu, I., Ropke, S., Cordeau, J.-F., and Laporte, G. (2010). The Traveling Salesman Problem with Pickup and Delivery: Polyhedral Results and a branch-and-cut Algorithm. Math. Program 121, 269–305. doi:10.1007/s10107-008-0234-9
Eyerich, P., Mattmüller, R., and Röger, G. (2009). “Using the Context-Enhanced Additive Heuristic for Temporal and Numeric Planning,” in Proceedings of the Nineteenth International Conference on Automated Planning and Scheduling. ICAPS’09. AAAI Press.
Fikes, R. E., and Nilsson, N. J. (1971). Strips: A New Approach to the Application of Theorem Proving to Problem Solving. Artif. Intelligence 2, 189–208. doi:10.1016/0004-3702(71)90010-5
Fox, M., and Long, D. (2003). PDDL2.1: An Extension to PDDL for Expressing Temporal Planning Domains. ArXiv abs/1106.4561.
Geißer, F., Keller, T., and Mattmüller, R. (2015). “Delete Relaxations for Planning with State-dependent Action Costs,” in Proceedings of the 24th International Conference on Artificial Intelligence (AAAI Press), 1573–1579. IJCAI’15.
Gerkey, B. P., and Matarić, M. J. (2004). “A Formal Analysis and Taxonomy of Task Allocation in Multi-Robot Systems,” in The International Journal of Robotics Research (SAGE), 23, 939–954. doi:10.1177/0278364904045564Int. J. Robotics Res.
Grefenstette, J., Gopal, R., Rosmaita, B., and Van Gucht, D. (1985). “Genetic Algorithms for the Traveling Salesman Problem,” in Proceedings of the first International Conference on Genetic Algorithms and their Applications (Taylor & Francis), 160–168.
Guimarães, R. L., de Oliveira, A. S., Fabro, J. A., Becker, T., and Brenner, V. A. (2016). ROS Navigation: Concepts and Tutorial. Cham: Springer, 121–160. doi:10.1007/978-3-319-26054-9_6ROS Navigation: Concepts and Tutorial
Hadfield-Menell, D., Kaelbling, L. P., and Lozano-Pérez, T. (2013). “Optimization in the Now: Dynamic Peephole Optimization for Hierarchical Planning,” in 2013 IEEE Int. Conf. On Robotics and Automation (IEEE), 4560–4567. doi:10.1109/icra.2013.6631225
Kavraki, L. E., Svestka, P., Latombe, J.-C., and Overmars, M. H. (1996). Probabilistic Roadmaps for Path Planning in High-Dimensional Configuration Spaces. IEEE Trans. Robot. Automat. 12, 566–580. doi:10.1109/70.508439
Kazhoyan, G., Niedzwiecki, A., and Beetz, M. (2020). “Towards Plan Transformations for Real-World mobile Fetch and Place,” in 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May-31 Aug. 2020, 11011–11017. doi:10.1109/ICRA40945.2020.9197446
Koenig, N., and Howard, A. (2004). “Design and Use Paradigms for Gazebo, an Open-Source Multi-Robot Simulator,” in 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), Sendai, Japan, 28 Sept.-2 Oct. 2004, 2149–2154.3
Lager, A., Papadopoulos, A., Spampinato, G., and Nolte, T. (2021). “A Task Modelling Formalism for Industrial mobile Robot Applications,” in 20th International Conference on Advanced Robotics. IEEE. doi:10.1109/icar53236.2021.9659481
Lager, A., Spampinato, G., Papadopoulos, A. V., and Nolte, T. (2019). “Towards Reactive Robot Applications in Dynamic Environments,” in IEEE Int. Conf. On Emerging Tech. and Factory Automation (ETFA) (IEEE), 1603–1606. doi:10.1109/etfa.2019.8868963
Lima, O., Cashmore, M., Magazzeni, D., Micheli, A., and Ventura, R. (2020). Robust Plan Execution with Unexpected Observations. arXiv [Preprint]. Available at: https://doi.org/10.48550/arXiv.2003.09401.
Lou, P., Liu, Q., Zhou, Z., Wang, H., and Sun, S. X. (2012). Multi-agent-based Proactive-Reactive Scheduling for a Job Shop. Int. J. Adv. Manuf Technol. 59, 311–324. doi:10.1007/s00170-011-3482-4
Mac, T. T., Copot, C., Tran, D. T., and De Keyser, R. (2016). Heuristic Approaches in Robot Path Planning: A Survey. Robotics Autonomous Syst. 86, 13–28. doi:10.1016/j.robot.2016.08.001
Mannucci, A., Pallottino, L., and Pecora, F. (2019). Provably Safe Multi-Robot Coordination with Unreliable Communication. IEEE Robot. Autom. Lett. 4, 3232–3239. doi:10.1109/lra.2019.2924849
Miloradović, B., Çürüklü, B., Ekström, M., and Papadopoulos, A. V. (2020). “A Genetic Algorithm Approach to Multi-Agent mission Planning Problems,” in Operations Research and Enterprise Systems (Cham: Springer Int. Publishing), 109–134. doi:10.1007/978-3-030-37584-3_6
Miloradovic, B., Çürüklü, B., Ekström, M., and Papadopoulos, A. V. (2021). GMP: A Genetic Mission Planner for Heterogeneous Multirobot System Applications. IEEE Trans. Cybern. [Epub ahead of print]. doi:10.1109/TCYB.2021.3070913
Rintanen, J. (2007). “Complexity of Concurrent Temporal Planning,” in Proceedings of the Seventeenth International Conference on International Conference on Automated Planning and Scheduling (AAAI Press), 280–287. ICAPS’07.
Salii, Y. (2019). Revisiting Dynamic Programming for Precedence-Constrained Traveling Salesman Problem and its Time-dependent Generalization. Eur. J. Oper. Res. 272, 32–42. doi:10.1016/j.ejor.2018.06.003
Tajvar, P., Barbosa, F. S., and Tumova, J. (2020). “Safe Motion Planning for an Uncertain Non-holonomic System with Temporal Logic Specification,” in 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE), Hong Kong, China, 20-21 Aug. 2020, 349–354. doi:10.1109/CASE48305.2020.9216891
Keywords: autonomous robots, task planning, optimization, ROS, robot task modelling
Citation: Lager A, Spampinato G, Papadopoulos AV and Nolte T (2022) Task Roadmaps: Speeding up Task Replanning. Front. Robot. AI 9:816355. doi: 10.3389/frobt.2022.816355
Received: 16 November 2021; Accepted: 29 March 2022;
Published: 28 April 2022.
Edited by:
Giovanni Indiveri, University of Genoa, ItalyReviewed by:
Lukas Chrpa, Czech Technical University in Prague, CzechiaTin Lai, The University of Sydney, Australia
Copyright © 2022 Lager, Spampinato, Papadopoulos and Nolte. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Alessandro V. Papadopoulos, YWxlc3NhbmRyby5wYXBhZG9wb3Vsb3NAbWR1LnNl