 Kangyou Su1
Kangyou Su1 Jian Chen
Jian Chen Wenyong Duan
Wenyong Duan- 1Electronic and Information Engineering Department, Guangdong Baiyun University, Guangzhou, China
- 2Undergraduate Office, Yancheng Biological Engineering Higher Vocational Technology School, Yancheng, China
- 3School of Electrical Engineering, Yancheng Institute of Technology, Yancheng, China
With the development and expansion of the power grid, the load frequency control (LFC) scheme receives sensor signals and outputs control signals through an open communication network with a mass of data and extensive information exchange, which may introduce constant, and time-varying delays. This paper considers the optimization and H∞ performance problem for LFC of power systems with time-varying delays. Some improved criteria for guaranteeing the stability and H∞ performance of the closed-loop system with unknown external load disturbances via the Lyapunov stability theory application. An unique delay-dependent proportional-integral (PI) controller and an optimized PI controller are designed for a specified H∞ performance index and set, respectively. The criteria proposed in this paper are based on linear matrix inequalities (LMIs), which can be easily solved by the MATLAB LMI-Toolbox. Finally, in case studies, the effectiveness of our method is demonstrated.
1 Introduction
LFC strategy is equipped to guarantee the power grid frequency, an important index of power quality, stability (de A. F. Mello et al., 2020). With the development and expansion of the power grid, the dedicated independent communication network has been unable to meet the operation of the power grid (Khalil and Swee Peng, 2018). Recently, LFC scheme transmits sensor and control signals based on an open communication network, where random delays and data packets will be introduced into the LFC scheme (Shen et al., 2021). These network factors may cause the LFC system performance degradation and even instability. Thus, it is necessary to study the influence of time-varying delays on performance of the LFC system in an open communication network.
The network controlled LFC system involves two main cases of time-varying delays: 1) the communication time-varying delay from the control center to the governor (Ramakrishnan and Ray, 2015; Yang et al., 2018; Chen et al., 2020; Manikandan and Kokil, 2020), where delay-dependent stability analysis and controller design are investigated by using single delay to model all time delays; 2) In fact, not only the communication time-varying delay from the control center to the governor but also from the sensor to the control center (Jiang et al., 2012; Xu et al., 2017; Shen et al., 2019a), where general delay-dependent stability analysis is studied by using additive time-varying delays to model two different time delays. In a word, the LFC scheme with communication channels can be treated as a typical delayed system. For the stability analysis of the system, it is significance to seek the maximum allowable time delay upper bounds to guarantee the stability of the power system based on LFC scheme, which has attracted more and more scholars’ attention (Ali et al., 2020; del Giudice et al., 2021; Ladygin et al., 2020; Baykov et al., 2019). The stability conditions and controller design are obtained mainly by the Lyapunov stability theory. For further reducing the conservatism of stability criteria, two updates are in progress. On the one hand, the Lyapunov-Krasovskii functional (LKFs) are improved via some novel approaches. Duan et al. (2019a); Duan et al. (2020a); Hua et al. (2021) constructed new LKFs by using the delay decomposition method. The LKFs were modified in Duan et al. (2016); Duan et al. (2017); Scopus et al. (2020); Gholami (2021) by intruducing some multiple integral items. Duan et al. (2020b) augmented the LKF with some augmented vectors. On the other hand, the upper bounds of the derivatives of the LKFs are estimated using some novel tight inequality techniques. Jensen inequality and B-L inequality were proposed in Gu (2000) and Seuret and Gouaisbaut (2015), respectively, where a tight upper bound of the derivative of the LKFs was obtained. Zhang et al. (2017a); Duan et al. (2018); Duan et al. (2019b); Feng et al. (2020); Kwon and Lee (2021) reduced the conservatism of the stability criterion via some relaxed integral inequality techniques. Recently, a novel negative definite inequality equivalent transformation lemma was proposed in Fúlvia et al. (2020), which improved the degree of freedom for solving the LMI in the main theorem without introducing extra conservatism. Thus, there is still room to further reduce the conservatism of stability criteria for the LFC power system along with the update of stability methods for general time-delayed systems.
Moreover, the growing power system based on network control leads to the complexity and uncertainty. Many important control algorithms, such as robust control (Shayeghi et al., 2008), genetic algorithm (Rerkpreedapong et al., 2003), sliding mode control (Vrdoljak et al., 2010) and H∞ control (Dey et al., 2012; Shen et al., 2021), are used to ensure the operation stability and disturbance rejection capability of large-scale power systems. However, in many studies, especially in controller design, the influence of time delays, especially time-varying delays, is ignored. Based on the above discussion, the H∞ LFC problem of power systems with time-varyig delays and load disturbances is studied in this paper. The contributions of this paper can be summarized as follows:
• H∞ performance problem for the LFC power systems with time-varying delays is considered in this paper, where fixed and optimized controller gains for an given H∞ performance index γ and an performance index set [γ1, γ2] are respectively proposed;
• An augmented LKF combining delay-dependent non-integral terms with some single-integral terms under different time-varying delay subintervals are constructed, which reduces the conservatism caused by the LKF structure;
• A novel negative definite inequality equivalent transformation lemma proposed in (Fúlvia et al., 2020) is used to transform the nonlinear inequality to the LMI equivalently, which can be easily solved by the MATLAB LMI-Toolbox.
This paper is organized as follows. Section 2 gives the models of LFC schemes; Section 3 provides stability assessment and H∞ controller design for the LFC system. Section 4 shows cases studies. Conclusions are drawn in Section 5.
Notation: Throughout this paper, the notations are standard.
2 System Description and Problem Preliminaries
In this section, the model of one-area power system equipped with PI controllers and taking into account the time-varying communication delays is given. The basic diagram of the simplified LFC of one-area power system is shown in Figure 1, where e−sd is time delay, arising during the control signal sent from the control center to the governor.
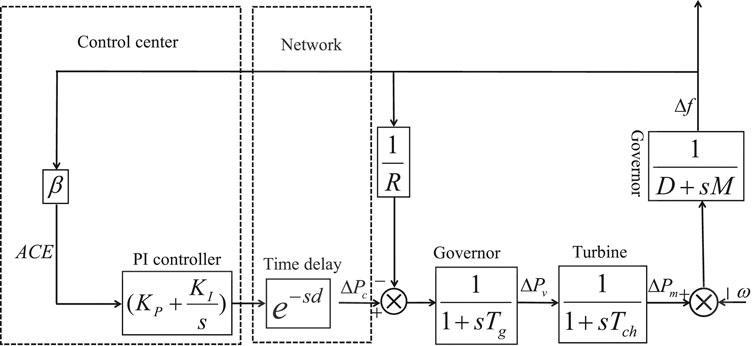
FIGURE 1. The basic diagram of the simplified LFC of one-area power system.
According the LFC system as shown in (Bevrani, 2014) and Figure 1, the common LFC scheme model of one-area can be expressed as follows:
where
and explanations of some terms are shown in Table 1. The following PI controller is used as the LFC scheme:
Due to the existence of the time-varying delay, in the feedback channel, the following is obtained
where h(t) represents the time-varying delay, and 0 ≤ h(t) ≤ h,
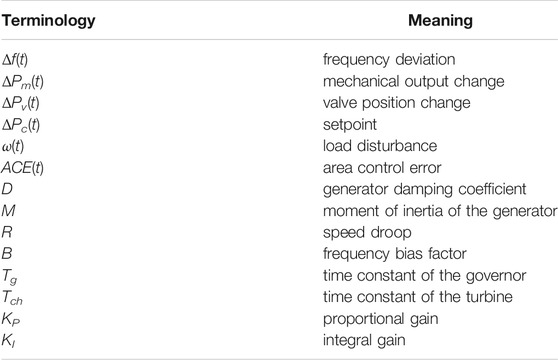
TABLE 1. Explanation of terminologies.
By defining virtual state and measurement output vector as y(t) = col{ACE(t), ∫ACE(t)dt} and x(t) = col{Δf(t), ΔPm(t), ΔPv(t), ∫ACE(t)dt}, K = [KP KI], the closed-loop LFC system can be expressed as the following linear system with time-varying delays:
where ϕ(t) denotes its initial condition which is a vector continuous function of t∈[−h, 0] and the system parameters are listed in the following form
A definition and some lemmas need to be displayed here before we proceed with the next step of calculation and discussion.
Definition 1 (Shen et al., 2019b) the system is considered to be asymptotically stable and meets the H∞ performance index γ if the following conditions are met.
• The system is asymptotically stable when the disturbance input is not taken into account (i.e., ω(t) ≡ 0).
• For any nonzero disturbance, given a positive scalar γ, the following inequality is satisfied under zero initial conditions (x(t) = 0, t ∈ [− d, 0]):
Lemma 1(Seuret and Gouaisbaut, 2015). For a positive definite matrix R and differentiable function x in
where
Lemma 2(Zhang et al., 2017b). For positive definite matrices R1,
the following inequality holds
Lemma 3(Fúlvia et al., 2020). Let symmetric matrices A0, A1,
holds for all ht ∈ [0, h] if and only if there exist a positive definite matrix
where
3 Main Results
In order to make the calculation process more concise, some expressions are given in advance as below
3.1 H∞ Performance Analysis
Theorem 1 Given positive scalars h, μ, ɛj and γ, system (4) is stable and meets the H∞ performance index γ, if there exist positive definite matrices
where the notations of other symbols and matrices can be found in Appendix A. Thus, the controller gain matrix calculated by
where the generalized inverse of (UB) is expressed as (UB)+.
Proof Construct an LKF candidate as
with
where S1(t) = htS11 + S12 and
According to Ri > 0, (i = 1, 2), letting
For an appropriately matrix
Finally, from the above derivation (11)–(15) and definition 1, we have
According to Lemma 3, the LMI (8) implies that Ξ < 0. Due to 0 < t < ∞, associating with (5), it has
Since V(∞) > 0, V(0) ≡ 0, then
which can guarantee that system (4) meets the H∞ performance index. This completes the proof.
3.2 Optimization of the Controller Gain
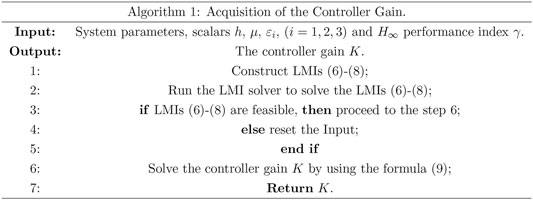
Obviously, the matrix inequalities in Theorem 3.1 are LMIs, which can be easily solved by the MATLAB LMI-Toolbox. That is, for a given H∞ performance index γ, the acquisition of the controller gain K can be processed simply by the convex optimization algorithm described as follows:
For a given H∞ performance index set [γ1, γ2], the controller gain K can be optimized via the binary search technique shown in Figure 2. Algorithm 2 is used to further illustrate the method.
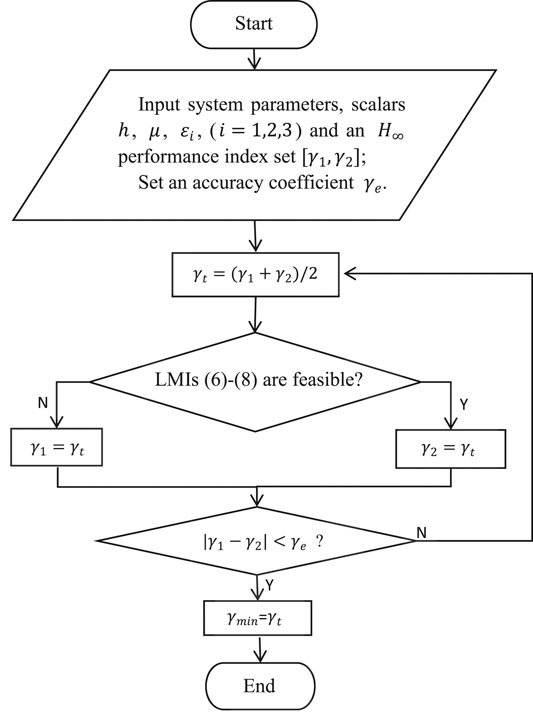
FIGURE 2. Binary search optimization for solving optimal performance index.
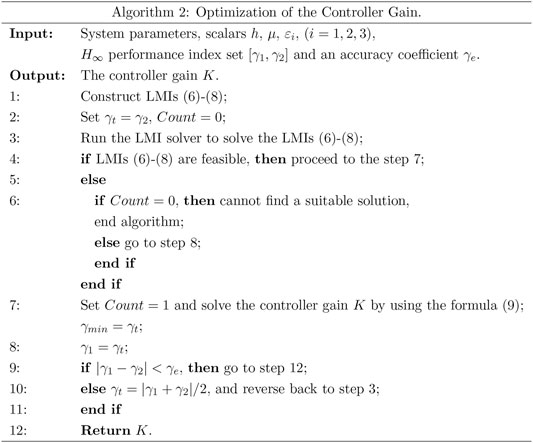
Optimization of the Controller Gain.
Input: System parameters, scalars h, μ, ɛi, (i = 1, 2, 3), H∞ performance index set [γ1, γ2] and an accuracy coefficient γe.
Output: The controller gain K.
1: Construct LMIs (6)–(8);
2: Set γt = γ2, Count = 0;
3: Run the LMI solver to solve the LMIs (6)–(8);
4: if LMIs (6)–8) are feasible, then proceed to the step 7;
5: else
6: if Count = 0, then cannot find a suitable solution,
end algorithm;
else go to step 8;
end if
end if
7: Set Count = 1 and solve the controller gain K by using
8: γ1 = γt;
9: if |γ1 − γ2| < γe, then go to step 12;
10: else γt = |γ1 + γ2|/2, and reverse back to step 3;
11: end if
12: Return K.
3.3 Delay-Dependent Stability Criterion for One-Area System
Remark 1 When dealing with unknown external load disturbances in power systems, it can be modeled as a nonlinear perturbation in the current and delayed state vectors (Ramakrishnan and Ray, 2015):
meets the following condition
where ɛ and θ are known non-negative scalars. A more generalized form of the condition is adopted, as follows:
where M and N are known constant matrices with appropriate dimensions. The non-negative scalars ɛ, θ and matrices M, N can be used to quantify the impact of load disturbances on power systems.
Corollary 1 Given positive scalars h, μ, ɛ, θ and λ system (4) is asymptotically stable, if there exist positive definite matrices
with
and other symbols see Theorem 1.
Proof The proof process of Corollary 1 is similar to Theorem 1, so it is omitted here.
Remark 2 Compared with the literature (Ramakrishnan and Ray, 2015; Yang et al., 2017; Jiao et al., 2021), the results in this paper reduce the conservatism via the augmented LKF application. The LKF proposed in this paper contains more information of the time-varying delay and the coupling information between the state variables and the delay than the literature (Ramakrishnan and Ray, 2015; Yang et al., 2017; Jiao et al., 2021), which reduces the conservatism caused by the LKF structure.
4 Case Studies
In this section, firstly, the effectiveness of the delay-dependent stability criterion for one-area LFC system proposed in this paper is shown. For given different KP and KI values, the maximum allowable time-delay upper bound values (MAUB) can be obtained by solving the LMIs in Corollary 1 via Matlab LMI-Toolbox. The LFC system parameters are described as Table 2 (Jiang et al., 2012), one-area LFC systems will be discussed and comparatively analyzed in the following subsections.

TABLE 2. Parameters of one-area LFC system.
4.1 Conservativeness Comparison
In order to compare with the existing results, Table 3 and Table 4 give the MAUB values of the case of given KP and KI values, ɛ = 0, θ = 0, M = N = 0.1I4,
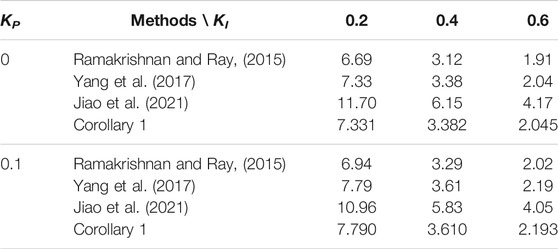
TABLE 3. MAUBs h for μ = 0 under one-area LFC system.
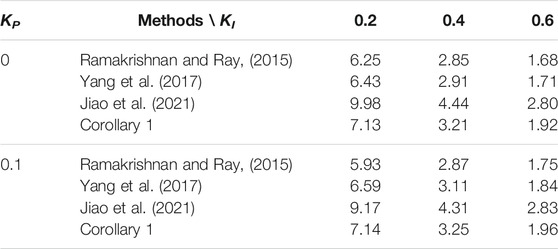
TABLE 4. MAUBs h for μ = 0.9 under one-area LFC system.
Simple simulations are carried out under an increase step load of 0.1 pu happening at 1s and the following assumptions. The simulation results are shown in Figures 3, 4, in which the LFC has achieve its objective and the control system is stable. In addition, according to the red curve a of Figure 3, the LFC system closes to critical stability with h(t) = 7.8, KP = 0.1 and KI = 0.2, while Corollary 1 in this paper obtains the MAUB h = 7.790. Thus, the delay-dependent stability criterion proposed in this paper is effective in estimating the upper bound of the maximum allowable time delay.
• For Figure 3, different KI and fixed KP = 0.1 and μ = 0:
a. KI = 0.2, h(t) = 7.8;
b. KI = 0.2, h(t) = 7.79;
c. KI = 0.4, h(t) = 3.61;
d. KI = 0.6, h(t) = 2.193;
• For Figure 4, different KP, KI fixed μ = 0.9:
a. KP = 0, KI = 0.2,
b. KP = 0, KP = 0.6,
c. KP = 0.1, KI = 0.2,
d. KP = 0.1, KI = 0.6,

FIGURE 3. Frequency deviation and control error responses of one-area LFC scheme under μ = 0.
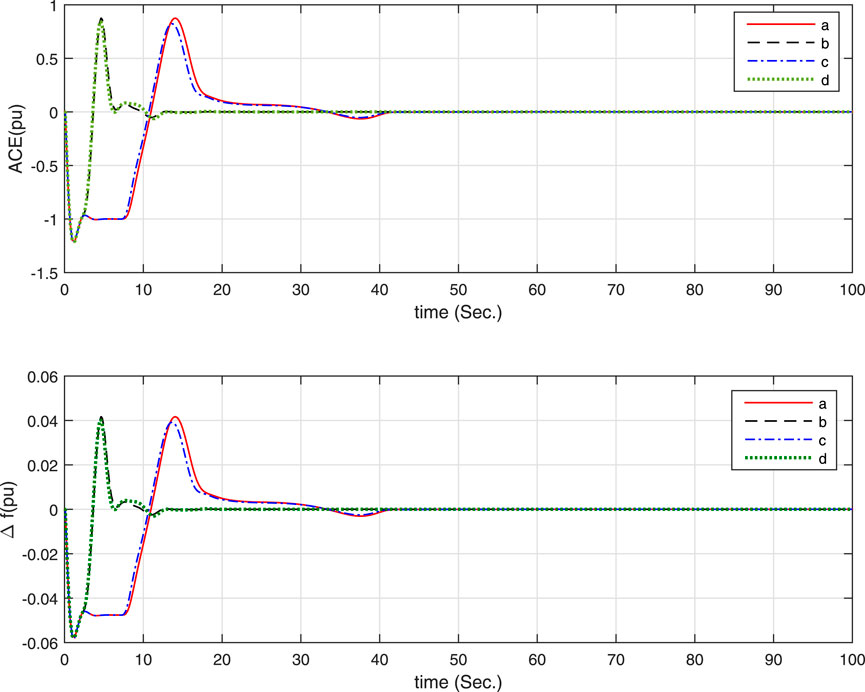
FIGURE 4. Frequency deviation and control error responses of one-area LFC scheme under μ = 0.9.
4.2 Optimization and H∞ Performance Discussion
In this subsection, much attention is focused on the following two aspects.
1) Design of the Controller: the MAUB is preset as 10 s and h(t) is considered as constant (μ = 0) and time-varying delay (μ = 0.9), respectively. For a given H∞ performance index γ = 0.4, the controller gains can be obtained in Table 5 by referring to the process given in Algorithm 1;
2) Optimization of the Controller: the MAUB is preset as 10 s and h(t) is considered as constant (μ = 0) and time-varying delay (μ = 0.9), respectively. For a given H∞ performance index set [0, 100] and γe = 0.5, the controller gains can be obtained in Table 6 by referring to the process given in Algorithm 2.

TABLE 5. Controller gains for h = 10 under different μ.

TABLE 6. Controller gains for h = 10 under different μ.
Simple simulations are carried out under an increase step load of 0.1 pu happening at 1s and the following assumptions. The simulation results are shown in Figures 5, 6, in which the LFC has achieve its objective. This scenario suggests that, the use of optimized controller has the merit of improving the performance of the LFC system in terms of its transient response characteristics as well as disturbance rejection capabilities over the tuned local PI controllers acting alone in the system.
• For Figure 5, h = 10 and γ = 0.4:
a. KP = − 0.0167, KP = 0.0824, h(t) = 8;
b. KP = − 0.0158, KP = 0.0889,
c. KP = − 0.0233, KP = 0.1027,
• For Figure 6, h = 10:
a. KP = − 0.0175, KP = 0.0857, h(t) = 8, γ = 0.3;
b. KP = − 0.0194, KP = 0.1008,
c. KP = − 0.0237, KP = 0.1191,
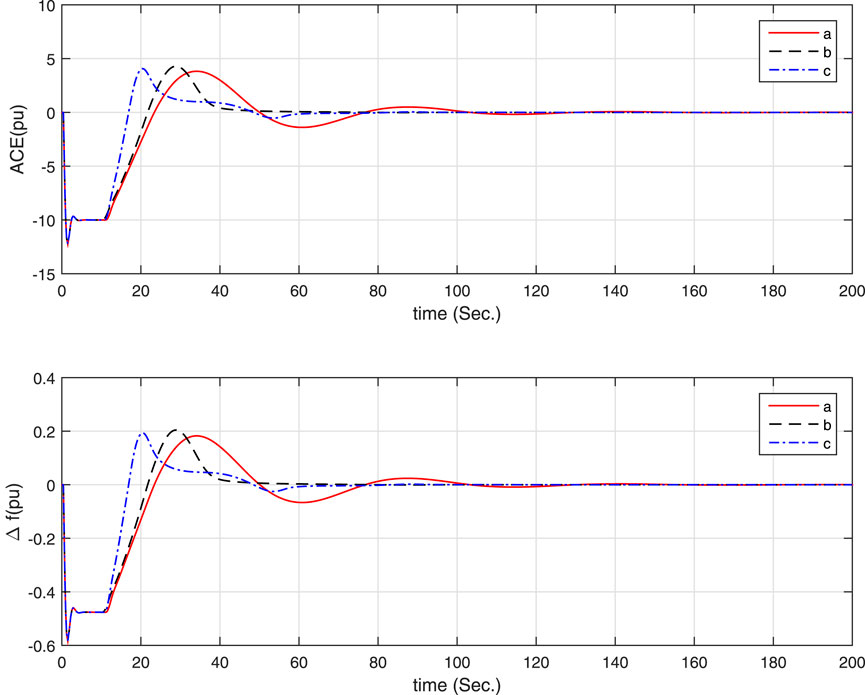
FIGURE 5. Frequency deviation and control error responses of one-area LFC scheme under γ = 0.4.
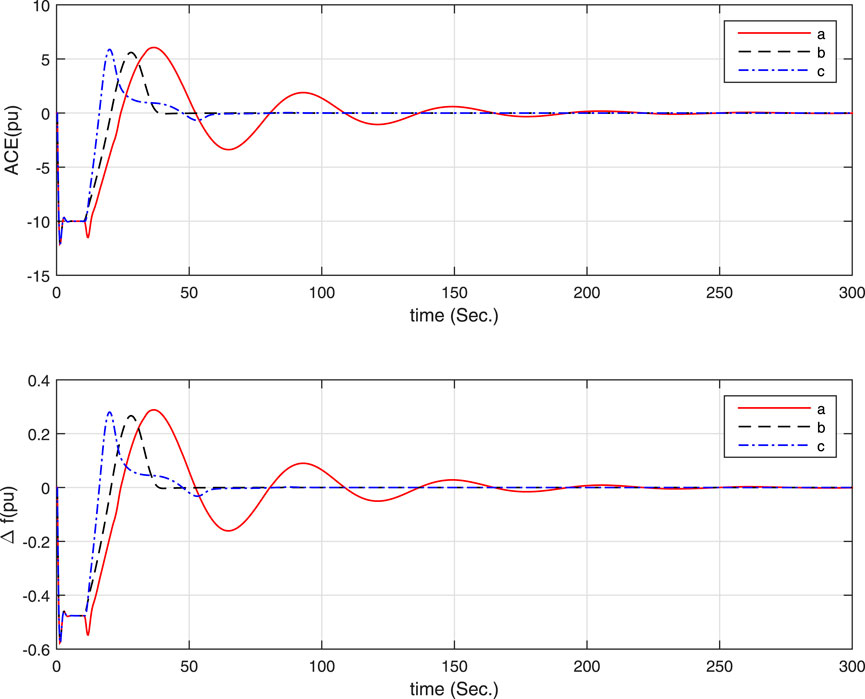
FIGURE 6. Frequency deviation and control error responses of one-area LFC scheme under γ = 0.37.
5 Conclusion
This paper focus on optimization and H∞ performance problem for LFC of power systems with time-varying delays. For the one-area LFC systems with single communication delays, stability criteria are obtained via Lyapunov stability theory application. Firstly, the one-area LFC system is described as linear systems with time-varying delays and load disturbances; Secondly, a modified LKF is constructed, which contains more coupling information between time-varying delays and state variables than some previous published results to further reduce the conservativeness of the stability criterion; Thirdly, an unique delay-dependent PI controller and an optimized PI controller are designed for a specified H∞ performance index and set, respectively. Finally, the effectiveness of the proposed method is illustrated by comparison and discussion in numerical examples, which shows that the use of optimized controller has the merit of improving the performance of the LFC system in terms of its transient response characteristics as well as disturbance rejection capabilities over the tuned local PI controllers acting alone in the system. However, the improvement of stability results is in the cost of increasing computational complexity. The derivation method of the stability criterion presented in this paper can be extended to multi-area LFC system, which is one of our further main topics.
Data Availability Statement
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author.
Author Contributions
Conceptualization, methodology, KS and WD; data curation, software, YL; writingoriginal draft, KS; writingreview and editing, JC. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported partly by the Guangdong higher education innovation strong school project under Grant no. 2018KQNCX296, the Technology Research Plan of Guangzhou under Grant no. 202002030230, the Industry University Research Cooperation Project of Jiangsu Province under Grant no. BY2020649, the NSF of Yancheng Biological Engineering Higher Vocational and Technical School under Grant no. x202104 and the Yellow Sea Rookie of Yancheng Institute of Technology.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary Material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fenrg.2021.762480/full#supplementary-material
References
Ali, D., Mohammad, M., Zeinolabedin, M., and Lieven, V. (2020). A Novel Technique for Load Frequency Control of Multi-Area Power Systems. Energies 13, 2125. doi:10.3390/en13092125
Baykov, D. V., Gulyaev, I. V., Inshakov, A. P., and Teplukhov, D. Y. (2019). Simulation Modeling of an Induction Motor Drive Controlled by an Array Frequency Converter. Russ. Electr. Engin. 90, 485–490. doi:10.3103/s1068371219070034
Chen, B.-Y., Shangguan, X.-C., Jin, L., and Li, D.-Y. (2020). An Improved Stability Criterion for Load Frequency Control of Power Systems with Time-Varying Delays. Energies 13, 2101. doi:10.3390/en13082101
de A. F. Mello, F. R., Apostolopoulou, D., and Alonso, E. (2020). Cost Efficient Distributed Load Frequency Control in Power Systems. IFAC-PapersOnLine 53, 8037–8042. doi:10.1016/j.ifacol.2020.12.2236
del Giudice, D., Brambilla, A., Grillo, S., and Bizzarri, F. (2021). Effects of Inertia, Load Damping and Dead-Bands on Frequency Histograms and Frequency Control of Power Systems. Int. J. Electr. Power Energ. Syst. 129, 106842. doi:10.1016/j.ijepes.2021.106842
Dey, R., Ghosh, S., Ray, G., and Rakshit, A. (2012). H∞ Load Frequency Control of Interconnected Power Systems with Communication Delays. Int. J. Electr. Power Energ. Syst. 42, 672–684. doi:10.1016/j.ijepes.2012.03.035
Duan, W., Du, B., Li, Y., Shen, C., Zhu, X., Li, X., et al. (2018). Improved Sufficient LMI Conditions for the Robust Stability of Time-delayed Neutral-type Lur'e Systems. Int. J. Control. Autom. Syst. 16, 2343–2353. doi:10.1007/s12555-018-0138-2
Duan, W., Fu, X., and Liu, Z. (2017). “Improved robust stability criteria for time-delay Lur’e system. Int. J. Control Automation Syst. 19, 1–12. doi:10.1002/asjc.1339
Duan, W., Fu, X., and Yang, X. (2016). “Further results on the robust stability for neutral-type Lur’e system with mixed delays and sector-bounded nonlinearities. Int. J. Control Automation Syst. 14, 1–9. doi:10.1007/s12555-014-0547-9
Duan, W., Li, Y., and Chen, J. (2020a). An Enhanced Stability Criterion for Linear Time-Delayed Systems via New Lyapunov-Krasovskii Functionals. Adv. Difference Equations 2020, 37–57. doi:10.1186/s13662-019-2439-z
Duan, W., Li, Y., and Chen, J. (2019). Further Stability Analysis for Time-Delayed Neural Networks Based on an Augmented Lyapunov Functional. IEEE Access 7, 104655–104666. doi:10.1109/access.2019.2931714
Duan, W., Li, Y., and Chen, J. (2019). New results on stability analysis of uncertain neutral-type Lur’e systems derived from a modified Lyapunov-Krasovskii functional. Complexity 2019, 1–20. doi:10.1155/2019/1706264
Duan, W., Li, Y., Sun, Y., Chen, J., and Yang, X. (2020). Enhanced master-slave synchronization criteria for chaotic Lur'e systems based on time-delayed feedback control. Mathematics Comput. Simulation 177, 276–294. doi:10.1016/j.matcom.2020.04.010
Feng, W., Luo, F., Duan, W., Li, Y., and Chen, J. (2020). An Improved Stability Criterion for Linear Time-Varying Delay Systems. Automatika 61, 229–237. doi:10.1080/00051144.2019.1706885
Fúlvia, S., de, O., and Fernando, O. (2020). Further Refinements in Stability Conditions for Time-Varying Delay Systems. Appl. Maths. Comput. 369, 124866.
Gholami, Y. (2021). Existence and Global Asymptotic Stability Criteria for Nonlinear Neutral-type Neural Networks Involving Multiple Time Delays Using a Quadratic-Integral Lyapunov Functional. Adv. Differ. Equ 2021, 112. doi:10.1186/s13662-021-03274-3
Gu, K. (2000). “An Integral Inequality in the Stability Problem of Time-Delay Systems,” in Proceedings of the 39th IEEE Conference on Decision and Control, Sydney, NSW, December 12–15, 2000.
Hua, C., Qiu, Y., Wang, Y., and Guan, X. (2021). An Augmented Delays-dependent Region Partitioning Approach for Recurrent Neural Networks with Multiple Time-Varying Delays. Neurocomputing 423, 248–254. doi:10.1016/j.neucom.2020.10.047
Jiang, L., Yao, W., Wu, Q. H., Wen, J. Y., and Cheng, S. J. (2012). Delay-dependent Stability for Load Frequency Control with Constant and Time-Varying Delays. IEEE Trans. Power Syst. 27, 932–941. doi:10.1109/tpwrs.2011.2172821
Jiao, S., Xia, J., Wang, Z., Chen, X., Wang, J., and Shen, H. (2021). An Improved Result on Stability Analysis of Delayed Load Frequency Control Power Systems. Int. J. Control. Autom. Syst. 19, 1633–1639. doi:10.1007/s12555-019-1063-8
Khalil, A., and Swee Peng, A. (2018). An Accurate Method for Delay Margin Computation for Power System Stability. Energies 11, 3466. doi:10.3390/en11123466
Kwon, N. K., and Lee, S. Y. (2021). An Affine Integral Inequality of an Arbitrary Degree for Stability Analysis of Linear Systems with Time-Varying Delays. IEEE Access 9, 51958–51969. doi:10.1109/access.2021.3070149
Ladygin, A. N., Bogachenko, D. D., and Kholin, V. V. (2020). Efficient Control of Induction Motor Current in a Frequency-Controlled Electric Drive. Russ. Electr. Engin. 91, 362–367. doi:10.3103/s106837122006005x
Manikandan, S., and Kokil, P. (2020). Stability Analysis of Load Frequency Control System with Constant Communication Delays. IFAC-PapersOnLine 53, 338–343. doi:10.1016/j.ifacol.2020.06.057
Ramakrishnan, K., and Ray, G. (2015). Stability Criteria for Nonlinearly Perturbed Load Frequency Systems with Time-Delay. IEEE J. Emerg. Sel. Top. Circuits Syst. 5, 383–392. doi:10.1109/jetcas.2015.2462031
Rerkpreedapong, D., Hasanovic, A., and Feliachi, A. (2003). Robust Load Frequency Control Using Genetic Algorithms and Linear Matrix Inequalities. IEEE Trans. Power Syst. 18, 855–861. doi:10.1109/tpwrs.2003.811005
Scopus, P., Tian, Y., and Wang, Z. (2020). Stability Analysis for Delayed Neural Networks Based on the Augmented Lyapunov-Krasovskii Functional with Delay-product-type and Multiple Integral Terms. Neurocomputing 410, 295–303.
Seuret, A., and Gouaisbaut, F. (2015). Hierarchy of LMI Conditions for the Stability Analysis of Time-Delay Systems. Syst. Control. Lett. 81, 1–7. doi:10.1016/j.sysconle.2015.03.007
Shayeghi, H., Jalili, A., and Shayanfar, H. A. (2008). A Robust Mixed H2/H∞ Based LFC of a Deregulated Power System Including SMES. Energ. Convers. Manage. 49, 2656–2668. doi:10.1016/j.enconman.2008.04.006
Shen, C., Li, Y., Zhu, X., and Duan, W. (2019). Improved Stability Criteria for Linear Systems with Two Additive Time-Varying Delays via a Novel Lyapunov Functional. J. Comput. Appl. Maths. 363, 312–324.
Shen, H., Jiao, S., Park, J. H., and Sreeram, V. (2021). An Improved Result on $H_{\infty }$ Load Frequency Control for Power Systems with Time Delays. IEEE Syst. J. 15, 3238–3248. doi:10.1109/JSYST.2020.3014936
Shen, H., Xing, M., Huo, S., Wu, Z.-G., and Park, J. H. (2019). Finite-time H∞ Asynchronous State Estimation for Discrete-Time Fuzzy Markov Jump Neural Networks with Uncertain Measurements. Fuzzy Sets Syst. 356, 113–128. doi:10.1016/j.fss.2018.01.017
Vrdoljak, K., Perić, N., and Petrović, I. (2010). Sliding Mode Based Load-Frequency Control in Power Systems. Electric Power Syst. Res. 80, 514–527. doi:10.1016/j.epsr.2009.10.026
Xu, H.-T., Zhang, C.-K., Jiang, L., and Smith, J. (2017). Stability Analysis of Linear Systems with Two Additive Time-Varying Delays via Delay-product-type Lyapunov Functional. Appl. Math. Model. 45, 955–964. doi:10.1016/j.apm.2017.01.032
Yang, F., He, J., and Wang, D. (2018). New Stability Criteria of Delayed Load Frequency Control Systems via Infinite-Series-Based Inequality. IEEE Trans. Ind. Inf. 14, 231–240. doi:10.1109/tii.2017.2751510
Yang, F., He, J., and Wang, J. (2017). “Novel Stability Analysis of Delayed LFC Power Systems by Infinite-Series-Based Integral Inequality,” in Proceedings of the IEEE Conference on Control Technology and Applications (CCTA), Maui, HI, August 27–30, 2017, 1384–1389. doi:10.1109/ccta.2017.8062652
Zhang, C.-K., He, Y., Jiang, L., and Wu, M. (2017). Notes on Stability of Time-Delay Systems: Bounding Inequalities and Augmented Lyapunov-Krasovskii Functionals. IEEE Trans. Automat. Contr. 62, 5331–5336. doi:10.1109/tac.2016.2635381
Zhang, X.-M., Han, Q.-L., Seuret, A., and Gouaisbaut, F. (2017). An Improved Reciprocally Convex Inequality and an Augmented Lyapunov-Krasovskii Functional for Stability of Linear Systems with Time-Varying Delay. Automatica 84, 221–226. doi:10.1016/j.automatica.2017.04.048
Appendix A
Notations of other symbols and matrices for Theorem 1:
Keywords: optimization and control, power system, smart grids, H ∞ control, load frequency control, time delays
Citation: Su K, Li Y, Chen J and Duan W (2021) Optimization and H∞ Performance Analysis for Load Frequency Control of Power Systems With Time-Varying Delays. Front. Energy Res. 9:762480. doi: 10.3389/fenrg.2021.762480
Received: 22 August 2021; Accepted: 30 September 2021;
Published: 20 October 2021.
Edited by:
Yaxing Ren, University of Warwick, United KingdomReviewed by:
Yan Zhang, Jinling Institute of Technology, ChinaYaping Xia, Xiangtan University, China
Copyright © 2021 Su, Li, Chen and Duan. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Wenyong Duan, ZHd5MTk4NUAxMjYuY29t