 Davide Picchi*
Davide Picchi* Sigrid Brell-Çokcan
Sigrid Brell-Çokcan- Chair of Individualized Production, RWTH Aachen University, Aachen, Germany
Mini cranes play a pivotal role in construction due to their versatility across numerous scenarios. Recent advancements in Reinforcement Learning (RL) have enabled agents to operate cranes in virtual environments for predetermined tasks, paving the way for future real-world deployment. Traditionally, most RL agents use a squashed Gaussian distribution to select actions. In this study, we investigate a mini-crane scenario that could potentially be fully automated by AI and explore replacing the Gaussian distribution with the Kumaraswamy distribution, a close relative of the Beta distribution, for action stochastic selection. Our results indicate that the Kumaraswamy distribution offers computational advantages while maintaining robust performance, making it an attractive alternative for RL applications in continuous control applications.
1 Introduction
The advent of artificial intelligence (AI) has had a profound impact on the approach to solving automation problems, leading to a radical paradigm shift in a wide range of fields. In the domain of automation and engineering, Reinforcement Learning plays an important role in developing new concepts in which an agent is capable of controlling dynamic systems without the necessity of solving or modeling them with differential equations or similar methods. In Reinforcement Learning, an agent can control a dynamic system by repeating actions and receiving a reward from the environment (Sutton and Andrew, 2018). By maximizing the reward, an agent can efficiently learn a specific task. This approach opens new avenues for automating tasks even in traditionally underdigitalized sectors like construction. Concurrent with this development, there has been a paradigm shift in various fields, including the construction sector, despite its relative underdigitalization. The capacity to train an agent capable of controlling a construction machine through the creation of a dynamic simulation environment and the iteration of agent actions over multiple time steps is now a possibility. The dynamic programming approach, developed many decades ago, has undergone extensive refinement and enhancement through the integration of numerous novel algorithms in recent years, particularly through the extensive integration of neural networks as universal function approximators (Sutton and Andrew, 2018). One of the most interesting and efficient algorithms used in many Reinforcement Learning applications today is the Proximal Policy Optimization (PPO) algorithm (Schulman et al., 2017). This algorithm is on-policy based, offering robust performance in many robotic tasks and rapid convergence. In a paper published by Hsu et al. (2020), the authors revisited the algorithm, introducing several modifications. One of these modifications was to use a Beta distribution instead of a Gaussian distribution for the stochastic agent. The authors demonstrated that the Beta distribution produced accurate results and, in many benchmark environments, these results were superior to those obtained by other algorithms (Hsu et al., 2020). The effort to improve performance results is exemplified in the research conducted by Chou et al. (2017) by incorporating the Beta distribution within gradient-based policies for continuous control in the context of deep Reinforcement Learning. The authors have documented higher scores and faster convergence properties compared to those achieved using a Gaussian distribution, across a range of different gradient policies (Chou et al., 2017). The objective of this study is to determine whether an agent has the capacity to acquire the skills necessary to operate a mini-crane and subsequently transfer that knowledge to a real crane. Simultaneously, an evaluation of the Kumaraswamy distribution as a potential replacement for the Gaussian or Beta distribution is warranted.
1.1 The Kumaraswamy distribution
In recent advances within the fields of Reinforcement Learning and control systems, the selection of probability distributions has emerged as a pivotal element in the effective modeling of action spaces. Conventionally, the utilization of squashed Gaussian distributions has been prevalent due to their capacity to model continuous variables with a defined support. However, this study proposes the use of the Kumaraswamy distribution as an alternative to the Beta distribution. The Kumaraswamy distribution is distinguished by its flexibility and computational efficiency and it is distinct from a Gaussian distribution in that it does not necessitate the application of non-linear functions to achieve bounded outputs, a process referred to as squashing. Instead, the Kumaraswamy distribution inherently operates within a defined interval, that is,
Despite many similarities to the Beta distribution, such as two coefficients
1. It allows for a simplified form of log-probability computation, which is easier and faster to compute than the Beta distribution. This is a very important aspect, since the log-probability computation is fundamental in any gradient policy algorithm.
2. It has a closed-form derivative, which makes it easier and numerically stable for the gradient computation compared to the Beta distribution. This requirement is necessary for a differentiable policy parameterization.
3. Its entropy computation has a closed form solution, in contrast to the Beta distribution, which requires numerical integration. Entropy calculation is a prerequisite for most contemporary policy gradient algorithms.
4. It supports the reparameterization trick as shown in the work of Wasserman and Mateos (2024).
5. It is natively bounded in the range
6. It offers greater robustness at the boundary (when:
Mathematically, the PDF function of the Kumaraswamy distribution can be expressed by the following Equation 1:
While its CDF (Equation 2) and its inverse function (Equation 3) can be expressed as follows (Nalisnick and Smyth, 2016):
Allowing for a computationally affordable reparametrization trick sampling from the Uniform distribution
A linear transformation (Equation 5) is needed to map the bounded action range
Leading to the following Jacobian (Equation 6) and logarithmic probability (Equation 7):
1.2 The reparametrization trick in the Gaussian distribution
A considerable proportion of continuous control Reinforcement Learning algorithms yield action values that are distributed according to a Gaussian function. Subsequently, these values are processed through a tanh function (Equation 9) to align with the constraints of the action space (typically constrained to the interval
In order to facilitate the flow of the gradient through stochastic nodes by sampling
where
The inverse transformation of the squashed Gaussian is:
where y in Equation 11 is the reparametrized version of y in Equation 8, leading to the Jacobian (Equation 12) and the resulting log-probability formula (Equation 13):
As reported in Haarnoja et al. (2018).
1.3 The Beta distribution
For comparison, the PDF and the CDF of the Beta distribution are expressed as follows (respectively: Equations 14, 15):
While there is no simple closed form for the calculation of the inverse CDF, which complicates sampling via reparametrization tricks. The logarithmic probability formula can be expressed as follows.
where:
Which requires the computation of the log-gamma function
Equations 7, 13 illustrate a logarithmic probability calculation that incorporates logarithmic and exponential functions. Such computational burdens are less onerous than that of the log-probability computation of the Beta distributions (Equation 16), which implies the calculation of Equation 17. The Beta distribution incurs special-function evaluations (such as the log-gamma function), and its reparameterized sampling relies on two Gamma draws per action (Equations 16, 17), which are comparatively expensive. Conversely, the Kumaraswamy distribution avoids special functions entirely: its log-density and reparameterized sampler require only logarithms and power operations, with a closed form inverse CDF. Therefore, Kumaraswamy is typically considered computationally lighter than Beta, while remaining competitive with a squashed Gaussian, which is typically used in the context of Reinforcement Learning.
In the following Table 1 offers an overview about the different logarithmic probability computation formulas.
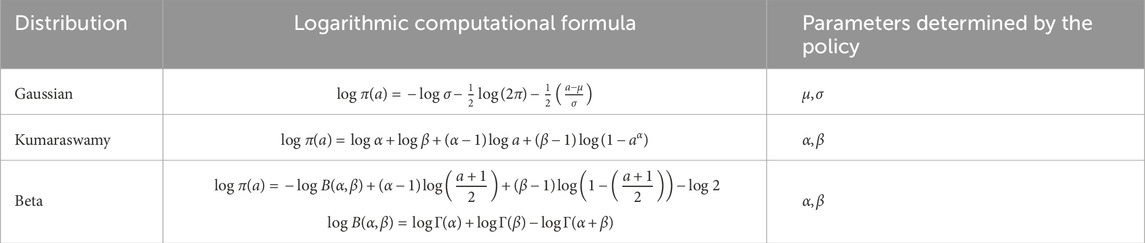
Table 1. Overview of the different logarithmic probability computation for three different distribution probabilities. The term
To empirically validate the theoretical advantages discussed earlier, this work evaluates the efficacy of the Kumaraswamy distribution in two different environments. Models using Kumaraswamy, the squashed Gaussian and the Beta distributions are compared under identical conditions across various performance metrics. To ensure that observed differences are not due to hyperparameter tuning or random initialization, the evaluation protocol includes systematic tuning, retraining with different seeds, and swapping hyperparameters between distributions (only between the Kumaraswamy and the squashed Gaussian), thereby assessing raw performance, robustness, and generalization.
The protocol has been applied to two different environments:
1. A simulated mini-crane tasked with navigating from one position to another while circumventing obstacles.
2. The standard LunarLander environment provided by the Farama Foundation is a well-known common framework for testing Reinforcement Learning algorithms. The latter was utilized as a testbed for the proper implementation of the PPO algorithm.
The protocol evaluates along two axes:
1. Distribution: Gaussian vs. Kumaraswamy vs. Beta
2. Environment: LunarLander vs. mini-crane
and consists on the following steps:
1. Tuning of hyperparameters: For each pair (environment, distribution) the PPO hyperparameters have been optimized using the tree-structured parzen estimator (TPE) for 100 trials. During this phase, a fixed random seed was constantly used.
2. Retraining across seeds Subsequently, the best hyperparameters were used to retrain each configuration from scratch with 10 different random seeds.
3. Evaluation: Each trained model was evaluated in 25 independent episodes (with unseen seeds). The means and standard deviations across seeds were collected.
4. Swapping of hyperparameters: To test whether performance differences are due to distributional choice or hyperparameter bias, the Gaussian agents have been re-trained using the best Kumaraswamy hyperparameters and vice versa.
5. Repeat retraining and evaluation The swapped configurations were re-trained with 10 seeds and evaluated as described in step 2.
Because the LunarLander environment provides dense rewards using a different reward function than the mini-crane environment, the two cannot be compared directly on the same evaluation metric (in this case the average reward during the evaluation phase). For LunarLander only the reward-based metrics was collected, whereas for the mini-crane the success and collision rates. The following metrics were collected during the evaluation:
1. Success Rate (mini-crane only): Percentage of episodes in which the crane successfully reaches its objective without experiencing a collision. Calculated as the ratio of successful episodes to total evaluation episodes.
2. Collision Rate (mini-crane only): Percentage of evaluation episodes in which a collision occurs, defined as contact of any crane component with obstacles or the ground. Calculated as the ratio of episodes with collisions to total episodes.
3. Mean Evaluation Reward (LunarLander only): Average cumulative reward across all evaluation episodes.
4. Standard Deviation of Evaluation Rewards (LunarLander only): Variability of evaluation rewards across episodes, indicating stability performance of the learned policy.
5. Confidence Intervals for Mean Reward: For both environments, 95% confidence intervals were computed around the mean evaluation reward (or success rate) across seeds, using the standard error of the mean. This provides a statistical measure of reliability.
6. Area Under the Learning Curve (AUC): Computed over training timesteps and averaged across 10 seeds. The AUC aggregates learning efficiency, capturing not only the final performance but also the speed of convergence.
7. Completion time (mini-crane only): It represents the time requested by the agent to accomplish the task. The timesteps for every episode are limited to a maximum of 2048 steps.
8. Kullback-Leibler divergence: This metric represents the update of the policy gradient during the training phase.
The efficacy and numerical stability of the distributions are of critical importance, as they directly impact both the efficiency of training and the reliability of policy optimization. In contrast to conventional supervised learning scenarios, Reinforcement Learning algorithms necessitate the repeated computation of log-probabilities and entropy gradients during each update step. Consequently, distributions such as Kumaraswamy, which provide closed-form expressions, are particularly advantageous for stochastic policy parameterization in Reinforcement Learning agents. In addition, in continuous action spaces with bounded ranges, the Kumaraswamy distribution can directly model action probabilities without requiring costly transformations (e.g., tanh-squashing), which could enhance numerical stability and gradient estimation in policy-gradient methods. It is important to note that despite its interesting characteristics and properties, the Kumaraswamy distribution remains mostly under-used (Wasserman and Mateos, 2024).
1.4 The choice of the mini-crane scenario
The underlying rationale for the utilization of a mini-crane environment in this study is rooted in the potential for subsequent real knowledge transfer into practical applications and real mini-crane. A close examination of the current state of automation in the construction industry reveals that the integration of robotic technology into cranes is still in its nascent stages of development. This observation is based on extensive interactions with professionals in the construction sector, particularly those specializing in construction robotics. Therefore, the implementation of Reinforcement Learning in practical applications has the potential to enhance the automation level of construction machinery, thereby paving the way for future advancements in the construction sector. It is evident that Reinforcement Learning alone is insufficient to achieve and offer a comprehensive automation solution. In actual scenarios, the incorporation of anti-collision sensors and safety features is imperative if not mandatory. However, a trained Reinforcement Learning agent offers additional benefits and advantages to human operators, even if its role is initially limited to providing assistance without assuming complete control of the crane. Although full automation may require additional safety measures such as anti-collision sensors, which are beyond our current scope, the RL framework presented here lays foundational work toward intelligent assistance systems for crane operators.
1.5 Scope of this study
This paper addresses the problem of analyzing computational efficiency and robustness in continuous action-space Reinforcement Learning for construction robotics by evaluating the Kumaraswamy distribution as an alternative to commonly used Gaussian or Beta policies in the aforementioned mini-crane environment. The novelty of this work lies in:
1. Implementing a Kumaraswamy based stochastic policy within PPO for mini-crane control.
2. Providing a systematic comparison against Gaussian policies under identical experimental conditions.
3. Empirically analyzing performance across multiple metrics including implementation efficiency, stability, and computational costs.
4. Highlighting practical considerations for real-world deployment.
In the present work, the development of a stochastic agent based on the Kumaraswamy distribution embedded in a PPO algorithm has been undertaken, leading to a robust, high-efficiency stochastic policy capable of controlling a task where the dynamic system is represented by a mini-crane that picks up a load from one start point and moves it to a goal without hitting any obstacles and under joint limit constraints. This work expands the design space for continuous stochastic policies beyond Gaussian and Beta in robotics Reinforcement Learning, introducing a theoretically grounded yet computationally lighter alternative to the Beta distribution. Furthermore, it introduces an underexplored, yet theoretically promising, distribution to Reinforcement Learning control tasks where bounded actions are required.
2 Literature review
The use of Reinforcement Learning (RL) in construction engineering is a subject that has been explored to some extent. Previous studies have investigated the application of Reinforcement Learning in training an agent to operate a crane in a virtual environment. This paper (Cho and Han, 2022) proposes the use of Reinforcement Learning to reduce and optimize lifting times using a tower crane in a virtual 3D environment. The tower crane is trained to perform autonomous and continuous actions by controlling the velocities of rotation, lifting, sliding, and other related processes. The authors demonstrated the efficacy of the agent in generating trajectories that optimize lift plans and crane operations, thereby avoiding collisions with obstacles. In their work, they benchmarked two different algorithms: an on-policy (PPO) and an off-policy (SAC) algorithm, by using different reward function combinations and tasks. The results showed that while both PPO and SAC agents were effective across different tasks, PPO achieved higher performance metrics than SAC in several scenarios (Cho and Han, 2022).
Another intriguing piece of research was presented by Keita et al. (2020), who used Reinforcement Learning to automate the movements of a crane and an excavator by behavior cloning. In their environment, they trained an agent for two distinct tasks: the primary task was to minimize the oscillation of a load, while the secondary task was to maximize the excavation of soil in a single operation. The study demonstrated the applicability of Reinforcement Learning in construction sites and the ability to train agents for specific tasks. A more sophisticated concept was presented in another study, in which Reinforcement Learning control was applied to a forestry crane manipulator (Andersson et al., 2021). The log grasping motion, combined with an energy optimization goal, constituted a significantly more complex task. In fact, Andersson et al. had to train their agent for approximately 20 million steps using curriculum learning. Thus, it can be concluded that the agent began with straightforward tasks and progressed to more intricate activities as its success rate increased over experience. The results obtained claim a success rate of 97% when using an on-policy algorithm, such as PPO, to train the agent. The mentioned work is unquestionably one of the most significant papers that provided the inspiration for our work.
It should also be noted that the authors were able to incentivize energy optimization by embedding it in the reward function (Andersson et al., 2021). Another paper examines the application of Reinforcement Learning in construction environments characterized by obstacles (Xiao et al., 2023). In that work, the authors Xiao et al. trained a PPO agent for controlling a 3D lift path planning of a crane during unloading and loading operations. The authors considered two different cases, which are recurrent in the aftermath of an earthquake scenario: one case without and one case with obstacles between the initial and final position, that could hinder the agent in its performance sensibly. The paper (Xiao et al., 2023) demonstrates that appropriate training leads to an agent policy that can achieve scheduled goals and reduce swing load oscillations within time constraints.
In their work, Kai et al. (2022) proposed an approach to crane scheduling operation model using deep Reinforcement Learning, implementing a Q-learning algorithm with deep neural networks. The authors treated a steel fabrication process, where two cranes need to perform a sequence of actions along the process, as a scenario. Notably, the authors did not employ more sophisticated algorithms such as TD3, PPO, SAC, or A2C. Nevertheless, they successfully trained an agent that was capable of achieving the objectives in 11.52% less time and reducing the collision time of crane routes by almost 57% (Kai et al., 2022). This resulted in enhanced efficient scheduling management performed by an AI agent.
The crane scheduling process is the primary focus of this other paper, in which the authors implemented a dynamic environment that has significantly enhanced the efficiency of automated storage yards through the use of twin automated stacking cranes (Xin et al., 2023). In this extensive and highly complex article, the authors demonstrate that an agent can learn sophisticated scheduling policies and concurrently generalize its problem-solving capabilities, thereby enabling deployment in unseen scenarios of various scales or distributions (Xin et al., 2023). A notable aspect of this work is the utilisation of the masked self-attention mechanism for training the agent within the framework, which has been shown to yield high-quality policies for the given task. The self-attention mechanism forms the foundation of the transformer architecture (Vaswani et al., 2023), a significant advancement in the field of AI, leading to the development of tools such as GPTs, image and music creation programs, and numerous other applications.
The following Table 2 offers a summary of the lacunae and the objectives pursued by the aforementioned studies.
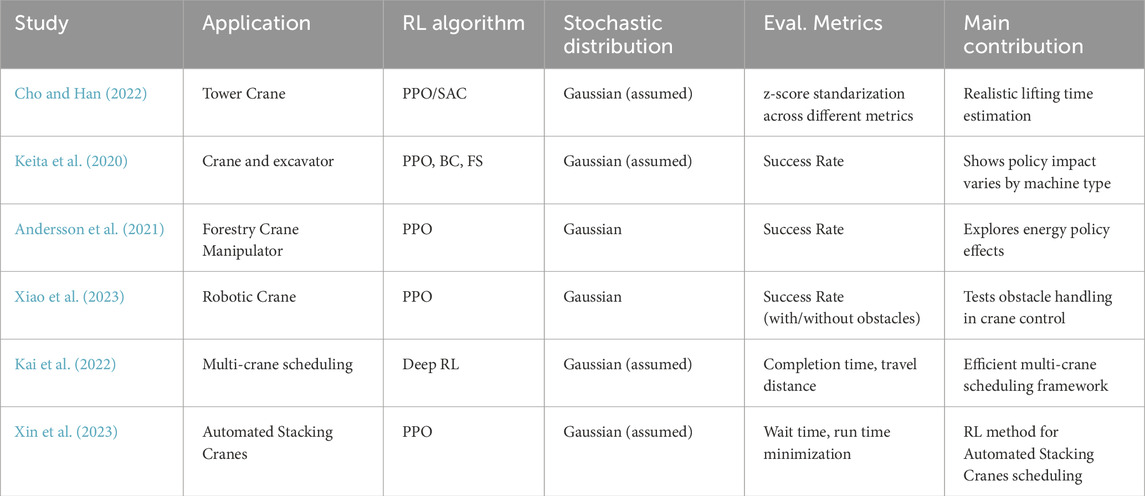
Table 2. Overview of the field of publications on the topic Reinforcement Learning in construction. The following abbreviations are used: PPO, Proximal Policy Optimization; SAC, Soft Actor Critic; BC, Behavior Cloning; FS, Frame Skipping.
The majority of previous works rely on Gaussian policies because of their mathematical convenience. However, these policies are deficient in their inability to address the limitations imposed by bounded action spaces. A limited number of studies have examined alternative double-bounded distributions, such as the Beta distribution (Hsu et al., 2020) in combination with a PPO policy algorithm. This alternative to a Gaussian distribution is of interest. However, it should be noted that the integration of PPO with a Beta distribution does incur a computational overhead that arises from log-probability calculations intrinsic to Beta distributions, as reported in Table 1. Moreover, the aforementioned study (Hsu et al., 2020) has not concentrated on construction robotics contexts, but rather has examined the benefits of the Beta distribution in a Reinforcement Learning context. The Kumaraswamy distribution constitutes an alternative option, exhibiting a similarity to the Beta distribution while avoiding the computational overhead characteristic of the latter. The present study proposes a methodology to address the aforementioned gaps using a systematic benchmarking process. This process involves the Kumaraswamy distribution being compared against established alternatives within a realistic mini-crane simulation environment.
3 The environment
The present study investigates and analyzes the applicability of the Kumaraswamy distribution applied to a mini-crane, which is tasked with a fundamental yet elementary undertaking: navigating its hook from a designated starting point to a predetermined goal position, while circumventing obstacles and avoiding collisions with the ground (Figure 1). This elementary task has been replicated within the simulation program Webots2, an open source software mostly used in robotic applications that allows virtual experimentation in dynamic environments, including collisions between objects.
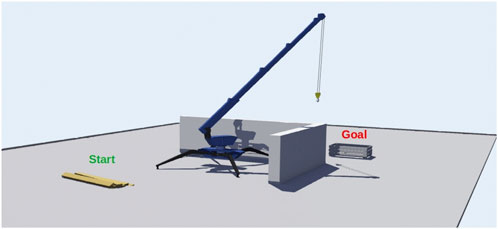
Figure 1. Simulation of a mini-crane going from one starting to a goal position.
The crane possesses a total of four degrees of freedom around four joints: while the body is fixed to the ground, the upper part of the body can rotate
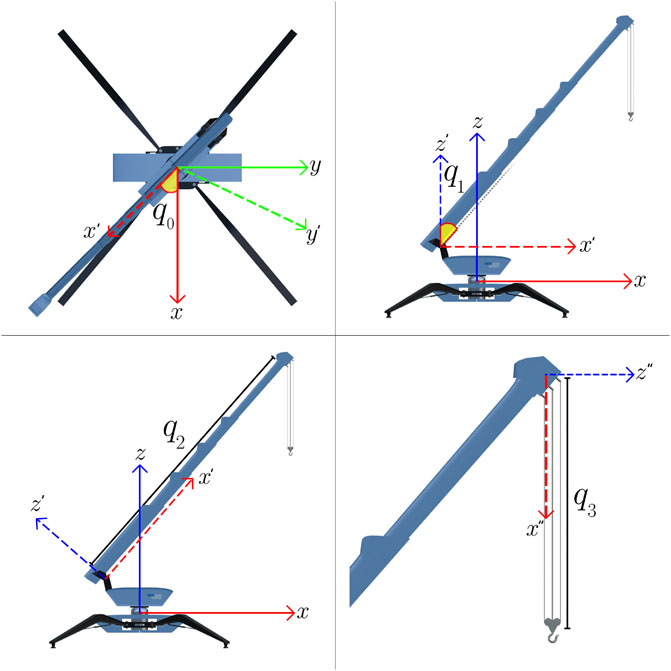
Figure 2. Joint positions of the mini-crane.
The choice of spherical coordinates is based on the physical configuration of standard mini-cranes, which includes the rotational base joint, the angle of the boom, the telescopic extension, and the length of the rope. Direct modeling of these actuators’ native domains has been shown to simplify the handling of kinematic constraints in comparison to the mapping of Cartesian outputs back into joint space. This is due to the fact that mapping Cartesian outputs back into joint space can result in highly nonlinear and non-invertible behavior in the vicinity of the workspace limits. Therefore, the definition of both state/action spaces in native joint coordinates is consistent with hardware reality, such as real sensors..
In the present study, the agent is trained in the following scenarios:
1. In the context of the LunarLander environment, the agent is tasked with the objective of landing a rocket-propelled lander by exercising control over two engines: a lateral engine and a main engine (Figure 3). The observation space comprises the two-dimensional coordinates of the ship, its linear and angular velocities, and the status of the legs’ contact with the ground. The action space is continuous. The reward function structure of the aforementioned environment consists of the distance to and from the landing pad, the landing speed, the tilt angle of the ship, the engine status, and the contact leg/ground. An additional positive/negative reward is granted for landing safely or crashing the ship on the landing pad.
2. In the context of the miniature crane environment, the simulation of a crane is required to execute the aforementioned task. The observation vector contains the joint coordinates and the absolute coordinates of the target, thus:

Figure 3. The LunarLander environment.
In both cases described above, neural networks are trained solely based on the reward function
For the mini-crane environment, four distinct actions define the action-space
In order to ensure that the problem is generalized and the robustness of the agent is improved, it is essential to initiate each episode by randomly determining the starting and goal positions in the fixed reference frame. This randomization has been achieved using a uniform distribution, which means that every possible position within the defined space has an equal likelihood of being selected. In doing so, the agent is exposed to a wide variety of initial conditions and target destinations, which helps to develop a more adaptable and resilient policy. The process is illustrated in Figure 4 which shows the areas of generation of start and target positions at the beginning of each episode.
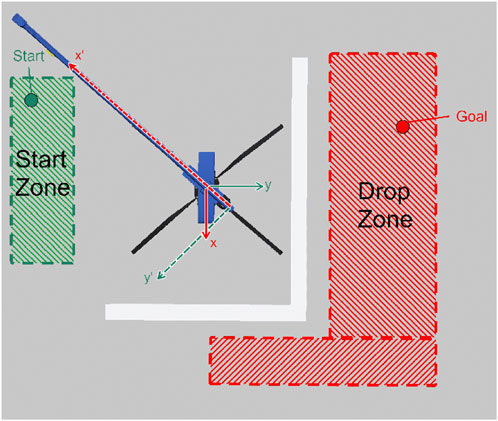
Figure 4. Overview of the zones, where the start and goal position is sampled from at the beginning of every episode.
For an episode to be designated as having a positive conclusion and to end within the time horizon, it is necessary for the mini-crane to move its load to a position close to the drop point (Figure 4). The episode ends only successfully when the Euclidean distance between the drop point and the load is
3.1 On-policy algorithm
Within the domain of Reinforcement Learning, any environment can be conceptualized as a Markov Decision Process (MDP). An environment fulfills the Markov property when the current state fully captures all relevant past information needed to take the next action. Furthermore, an MDP is characterized by the collection of a trajectory within a specific time horizon
The agent is designed to learn to generalize and determine actions in a variety of situations, thereby improving its resilience to potential obstacles and other challenges. In this research, the primary focus is on the PPO algorithm, used to train a policy that determines the subsequent action to be executed following a training phase extending over 1.2 million timesteps within the environment. The total loss
where:
where:
where:
The parameters
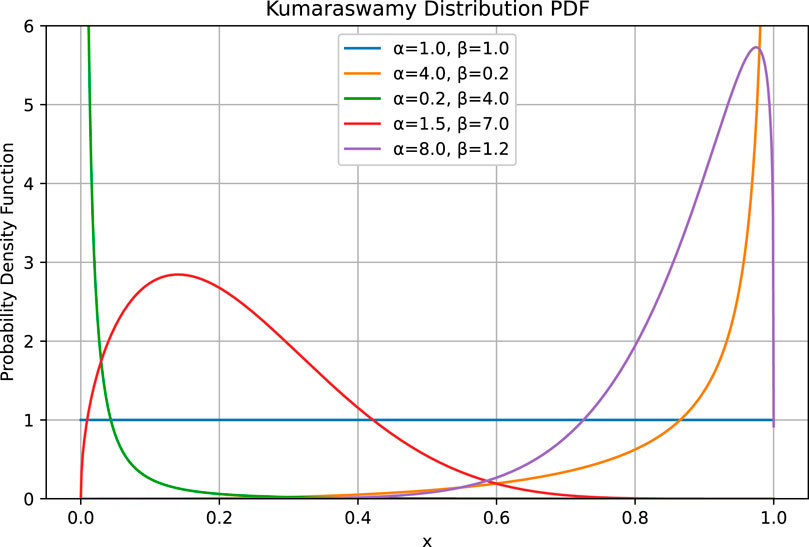
Figure 5. Behaviour of a Kumaraswamy distribution with different coefficients.
In the event that either parameter
3.2 Reward and coordinate reference system
As stated previously, the reward depends on the state of the system at any given time step and on the specific policy. In this research, experiments with numerous dense reward functions for the mini-crane environment were conducted, meticulously ensuring that each function was differentiable and continuous in its domain. Defining
where:
In general, the calculation of the Euclidean distance between two points in space is possible even when their position is expressed in spherical coordinates, as depicted in general (Equation 23), under the assumption that two points
In the context of the mini-crane studied in this work, a nuanced problem arises related to the coordinate system that is associated with the crane’s body. Specifically, this coordinate system undergoes rotational motion relative to a fixed reference coordinate system, which is used to define the positions of the goal and the surrounding walls. This means that as the crane operates, its coordinate system rotates, introducing complexity in how positions and movements are represented and calculated with respect to the stationary reference points of the goal and walls, as depicted in Figure 6.
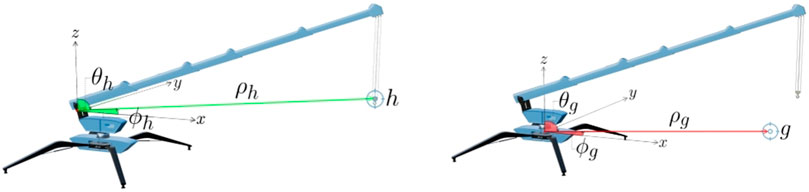
Figure 6. It is imperative to transform the hook coordinate system into the goal one, as the hook reference system is rotating with respect to the goal one.
This misalignment can introduce errors into distance computations and thus into reward assignment, unless all positions are transformed into a common reference frame before calculating Euclidean distances and lately the reward. Consequently, it is necessary to transform the hook position into the reference frame of the goal position, which is assumed to be fixed with the world. Then, the Euclidean distance between the two points can be calculated by using the Euclidean norm. The formula for distance computation is as follows:
4 Training the agent
In the present work, the PPO algorithm (Schulman et al., 2017) is implemented with three different stochastic agents: one based on a Gaussian distribution, one on a Kumaraswamy and the last on the Beta distribution. This process was performed separately for both the LunarLander environment and the mini-crane environment. The parameters of each distribution (
As stated previously, the input to neural networks is the observation vector
The training phase began with the identification of optimal hyperparameters for a given distribution and environment, as reported in Table 3. Subsequently, the agent has undergone retraining with ten distinct seeds while maintaining the same hyperparameters. The learning curves resulting from the best set of hyperparameters can be found in the following Figure 7 for performance comparison. The mini-crane and LunarLander environments possess different reward functions. Therefore, a direct comparison between the range of rewards on the
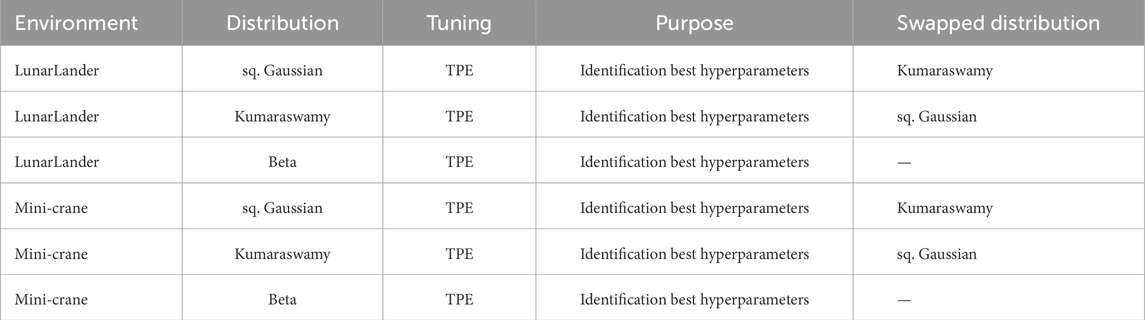
Table 3. Overview of the performed training phase. Every environment has been trained once with one distribution. Once the best hyperparameters have been found, the same environment has been re-trained using the other distribution but keeping the same optimal hyperparameters (with the only exception of the Beta distribution). The swap test is for ensuring robustness.
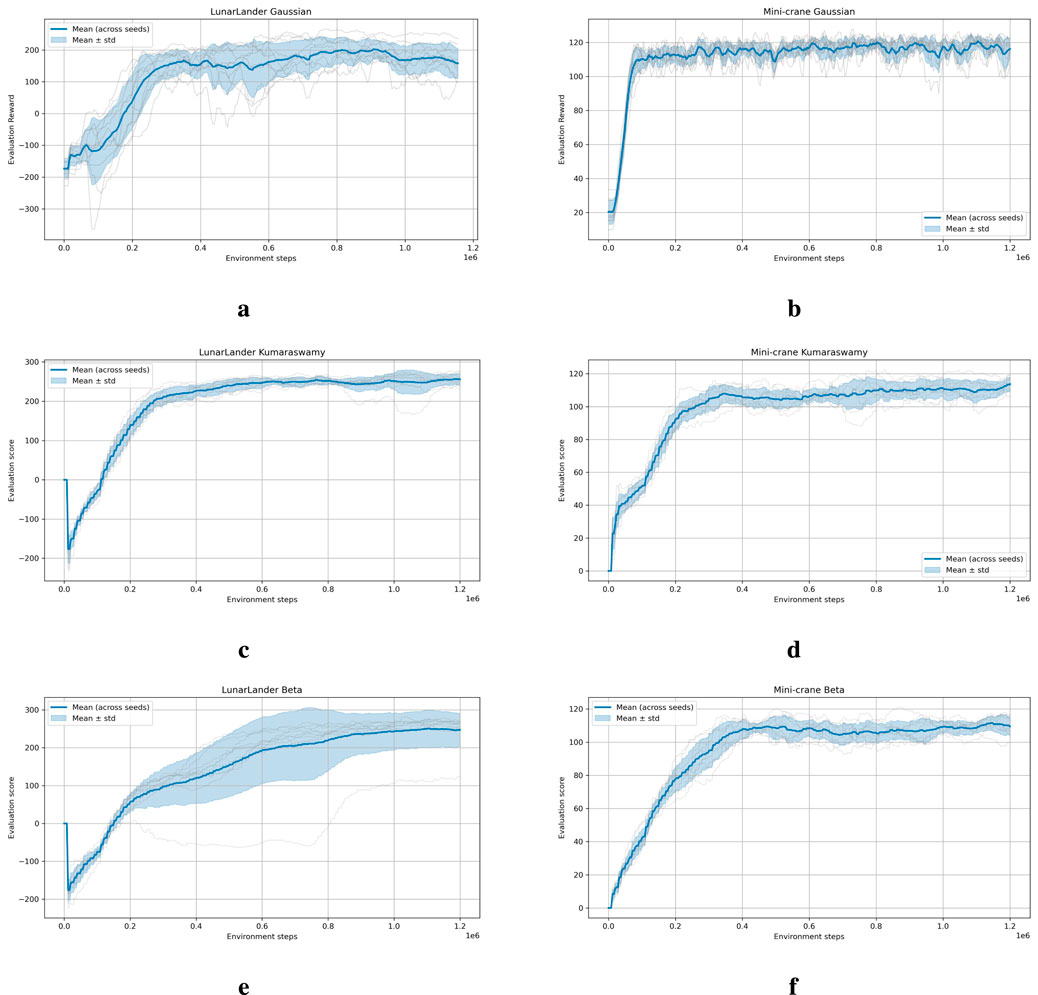
Figure 7. Training learning curves for the six considered scenarios. Each training was performed keeping the best hyperparameters and re-training the model with 10 different seeds. (a) LunarLander environment with Gaussian distribution. (b) Mini-crane environment with Gaussian distribution. (c) LunarLander environment with Kumaraswamy distribution. (d) Mini-crane environment withKumaraswamy distribution. (e) LunarLander environment with Beta distribution. (f) Mini-crane environment with Beta distribution.
The configuration of the reward function constitutes a pivotal element within the Reinforcement Learning framework, exhibiting considerable variability across different environments. In the present study, a series of dense reward functions were examined. It was determined that employing the raw Euclidean distance directly or as a negative exponent of any positive base presented substantial challenges to the agent in learning an acceptable policy. Conversely, the absolute Euclidean distance between the hook and goal position lacks sufficient signal strength to facilitate the agent’s learning of an appropriate policy. Consequently, the disparity in Euclidean distance between one timestep and the subsequent one is multiplied by a positive factor
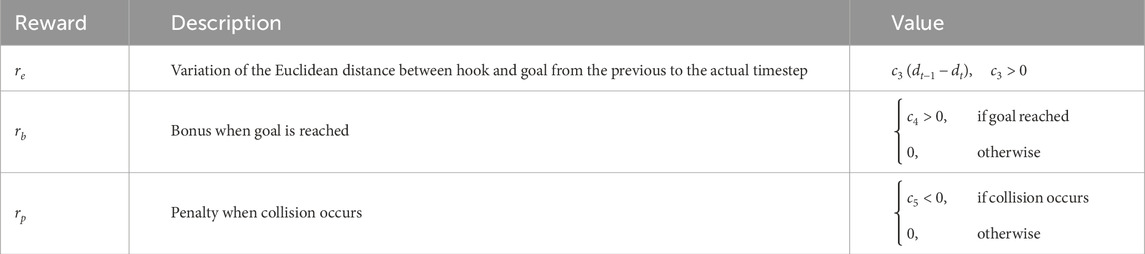
Table 4. Overview of the reward function structure. The values:
For agents based on Kumaraswamy and Beta distributions, a Softplus activation function is applied after the final dense layers of the actor network. Furthermore, a constant value of 1 is added to ensure that the coefficients
The reward function and the corresponding environments were kept constant throughout all phases of training, evaluation, and testing.
The experimental results presented in this study are the product of a training phase of 1.2 million timesteps.
5 Results
As illustrated in Table 5 the performance metrics for the LunarLander environment are compared for agents that were trained with a squashed Gaussian, Kumaraswamy and Beta as a policy distribution, validating the functionality of the implemented algorithm. For each distribution, the optimal top-3 hyperparameters were identified through the employment of TPE followed by a performance evaluation across 10 distinct random seeds over the course of 25 episodes. To assess robustness, the optimal hyperparameters were then applied to the alternate distribution (swap test).
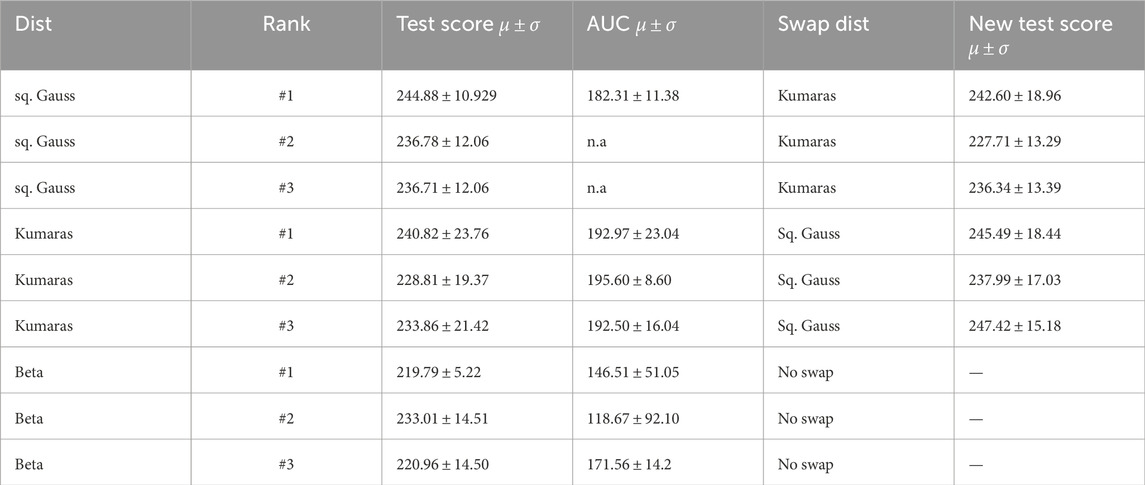
Table 5. Mean and standard deviation of the results obtained by testing the LunarLander environment with 10 different random seeds over 25 episodes, after identifying the best hyperparameters. The reported metrics in the table represent the average score during the evaluation process across the 10 seeds. Subsequently, the base distribution was replaced and the model retrained using the same hyperparameters. The table shows, on the left, the new results after swapping the distributions.
As reported in the Table 5, both distributions yield comparable mean test scores
In the context of the LunarLander environment, the process of swapping distribution and re-training the agent with an alternative distribution while maintaining the previously optimized hyperparameters does not result in a substantial degradation of the agent’s performance. A notable observation is the improvement in the mean score when transitioning from Kumaraswamy to squashed Gaussian. The result indicates that, under optimal conditions, both distributions demonstrate comparable levels of expressiveness for the designated task. Furthermore, the optimized hyperparameters exhibit a satisfactory degree of generalization across both distributions.
Table 6 summarizes analogous experiments conducted in the mini-crane environment, reporting success rates (target reached), collision rates, and AUCs. Agents employing the squared Gaussian distribution consistently outperform those based on a Kumaraswamy and the Beta distribution in terms of target-reaching success rate while maintaining minimal collision rates. The AUC metric further supports this trend: squashed Gaussian policies achieve higher values relative to their counterparts.
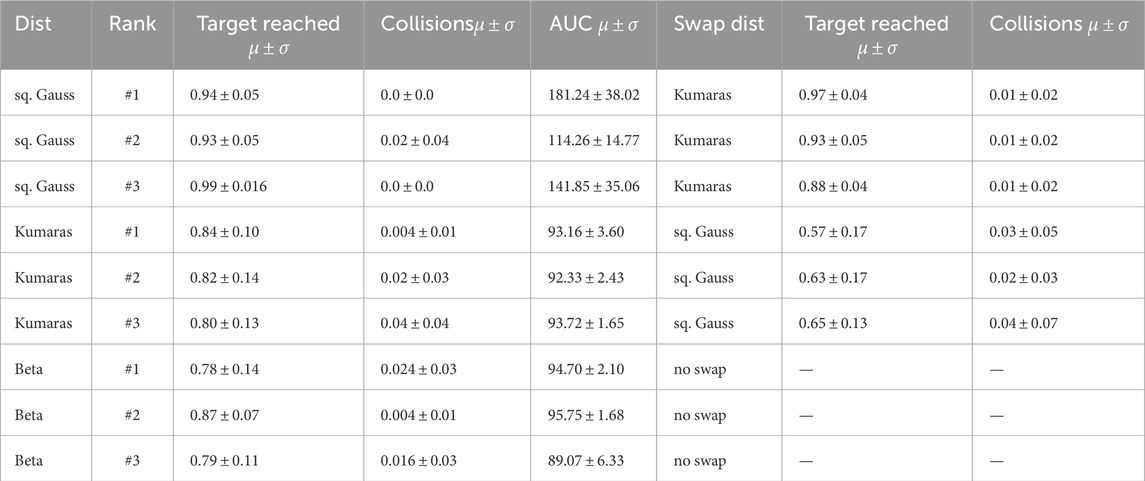
Table 6. Mean and standard deviation of the results obtained by testing the mini-crane environment with 10 different random seeds over 25 episodes, after identifying the best hyperparameters. The reported metrics in the table do not reflect per-episode scores; instead, they summarize the success rate (goal reached) and the number of collisions with the ground or walls. Subsequently, the base distribution was replaced and the model retrained using the same hyperparameters. The table shows, on the left, the new results after swapping the distributions.
Swapping hyperparameters from the Kumaraswamy to the squashed Gaussian distribution leads to a performance drop, while swapping the distribution from the squashed Gaussian to the Kumaraswamy leads to very similar performance, improving target-reaching rates but increasing collision frequency marginally.
These results suggest that both distributions can be effectively tuned to achieve competent and reliable behavior in the mini-crane environment. While the squashed Gaussian shows slightly higher success rates and marginally fewer collisions in some configurations, the agent based on Kumaraswamy also delivers strong performance, achieving high target-reaching rates with low collision frequencies. On the other hand, the performance delivered by the Beta and Kumaraswamy distributions is very similar.
One of the factors contributing to the observed performance decline when transitioning from the Kumaraswamy distribution to the squashed Gaussian distribution is the tendency of the TPE algorithm to identify networks with easy architecture when optimizing a squashed Gaussian agent. The top-ranking results for the squashed Gaussian demonstrate that the network capacity for the actor and critic is minimal, with each comprising two dense layers and 64 units.
Conversely, the same TPE algorithms demonstrate a propensity to favor more intricate network architectures for Kumaraswamy-based agents, characterized by two dense layers with 128 units for the actor and 256 or 512 units for the critic. It appears that the utilization of a higher capacity neural network engenders a rational decline in the performance of the squashed Gaussian agent.
In the context of the LunarLander environment, it has been observed that there is a negligible disparity in performance metrics when transitioning from the squashed Gaussian to the Kumaraswamy and vice versa. A thorough analysis of the optimal hyperparameters for both configurations revealed a striking similarity in the neural network architecture across both environments. The TPE algorithm identified a best configuration that is particularly straightforward in both cases. The actor network consists of two dense layers, each containing 64 units, while the critic network consists of two layers, with 128 units in each layer.
Even though the squashed Gaussian is more commonly used and easier to implement in standard Reinforcement Learning frameworks, the Kumaraswamy distribution is a competitive alternative. The swap test from one distribution to another while retaining optimized hyperparameters maintains a high level of performance, underlying the robustness of both policy types.
This observation supports greater flexibility in policy design for Reinforcement Learning agents: while implementation simplicity may favor squashed Gaussian distributions, Kumaraswamy-based models offer comparable effectiveness and can serve as an equally viable option for continuous control tasks such as mini-crane controlling application. For this reason, the Kumaraswamy distribution should be considered when exploring novel architectures or addressing specific application requirements.
Interestingly, an inverted variability pattern can be seen in the training and evaluation stages in the Tables 5, 6; Figure 7. During training, the Kumaraswamy policy produced smoother learning curves (i.e., smaller across-seed standard deviation) than the squashed Gaussian, suggesting more consistent update dynamics. However, during testing, Kumaraswamy’s policy exhibited greater variability in episode returns between seeds, while squashed Gaussian exhibited lower test-time variance. These two measures likely reflect different sources of randomness. Training-time variance quantifies differences in update trajectories (i.e., gradient/update stability), while test-time variance is dominated by sampling from the learned stochastic policy and sensitivity to initial conditions. The Kumaraswamy parameterization natively models bounded and potentially concentrated action distributions. This may yield steadier updates, but it also produces higher per-episode sampling variability (i.e., sharper modes) at evaluation time. Conversely, the squashed Gaussian produces smoother sampling noise at test time despite slightly less stable updates during training. Future work will address this causal analysis in more detail (gradient-variance diagnostics, LR ablations, and per-action histograms).
As illustrated in Figure 7, the training curves of both the Kumaraswamy and Beta distributions appear to be smoother than those of the squashed Gaussian. This phenomenon can be attributed to the gradient saturation induced by the tanh squash technique employed by the squashed Gaussian. The Kumaraswamy and Beta distributions are both inherently constrained within the interval
In order to understand this behavior, the KL divergence between consecutive policies has been monitored and used as an indicator of update stability. As illustrated in the following Figure 8, where the Kullback-Leibler divergence for the best hyperparameters across 10 random seeds for the mini-crane environment have been collected, the Beta distribution produces smoother and more stable KL trajectories compared to the squashed Gaussian, indicating a greater degree of controlled policy updates. On the other hand, the Kumaraswamy KL divergence appears slightly less noisy than the squashed Gaussian. This finding provides a potential explanation for the observation of smoother training curves and improved learning stability of the agent.
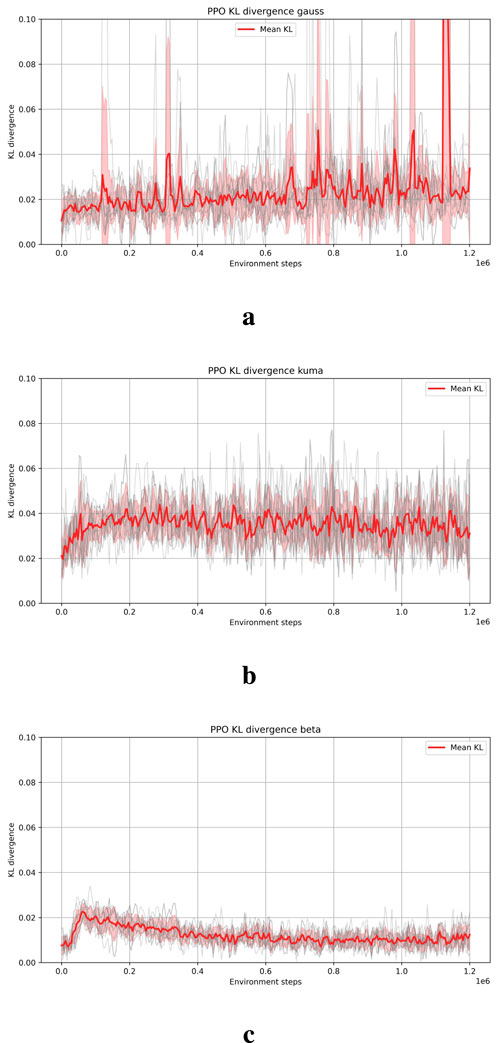
Figure 8. KL divergence of the three distributions for the mini-crane environment. (a) Squashed Gaussian distribution. (b) Kumaraswamy distribution. (c) Beta distribution.
An important observation relates to the time that each agent requires to complete an episode. A comparison of episode durations indicates that agents that utilize the Kumaraswamy distribution require more time than those employing a squashed Gaussian policy, as shown in Figure 9. Conversely, agents based on the Beta distribution demonstrate the longest episode durations. This phenomenon can be attributed to the elevated computational complexity inherent in the calculation of logarithmic and entropy functions for the Beta distribution, as previously discussed in the introduction and reported in Table 1. It is imperative to note that each episode is limited by a maximum of 2,048 steps. Furthermore, the increase in steps required by all three distributions exhibits an almost linear trend.
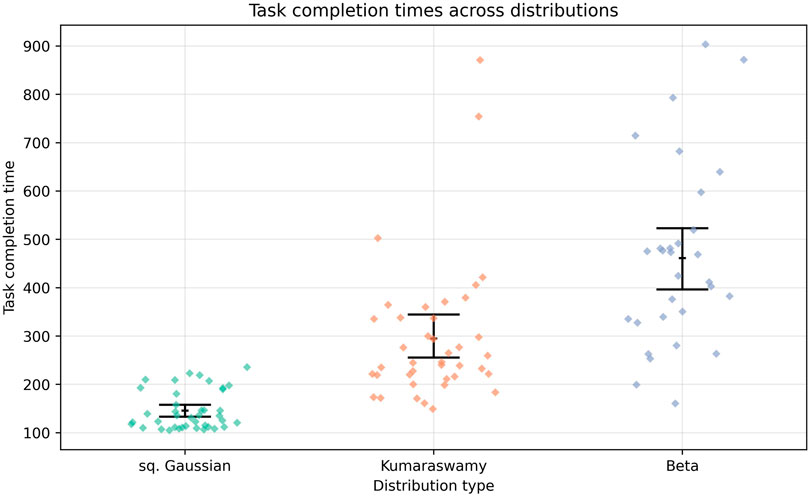
Figure 9. Episode completion time in the mini-crane environment for all three distribution types. Agents must reach the target within a maximum of 2048 steps per episode.
It should be noted that an agent based on the Kumaraswamy distribution, when trained using optimized hyperparameters for a squashed Gaussian, achieved a success rate nearly identical (97%) to that reported by Andersson et al. (2021) for their log manipulator task. However, Andersson et al. relied on Curriculum Learning over roughly 20 million training steps to reach this level of performance. In contrast, the approach proposed in this study achieved similar results after only 1.2 million timesteps.
Agents employing Beta distributions exhibited significantly higher computational demands, requiring four-to-five times longer execution than those using squashed Gaussians and about twice as long as those with Kumaraswamy policies, which has important implications when considering deployment on embedded platforms with limited hardware resources.
Furthermore, both Kumaraswamy and Beta-based policies tend to produce smaller incremental changes during policy updates compared with squashed Gaussians, a characteristic potentially beneficial in real-world robotics, where frequent or abrupt control actions can cause increased wear or mechanical stress on hardware components. Future research should further investigate how different policy distributions influence action smoothness and long-term system reliability during deployment in physical environments.
6 Conclusion
This study has demonstrated the feasibility and benefits of employing the Kumaraswamy distribution as a policy parameterization in on-policy reinforcement learning algorithms for continuous control tasks within construction robotics. By training an agent to operate a simulated mini-crane using PPO with Kumaraswamy-based stochastic policies, this study has shown that this approach yields robust performance comparable to established squashed Gaussian and Beta distributions. Notably, the Kumaraswamy distribution offers practical advantages: it enables closed-form log-probability calculations crucial for gradient-based updates, admits efficient entropy approximations, and results in lower computational overhead during training compared to the Beta distribution: an important consideration for real-time or embedded applications. The results in the previous chapters indicate that the Kumaraswamy distribution is not only a theoretically sound alternative but also provides tangible implementation benefits over the Beta distribution. It achieves competitive task success rates while simplifying policy network design and reducing episode completion times (compared to the Beta distribution).
Looking forward, several promising research directions emerge:
• Hyperparameter Search Analysis:: Future work will involve employing alternative hyperparameter optimization methods to investigate why TPE tends to suggest more complex architectures for agents utilizing the Kumaraswamy distribution.
• Action Magnitude Analysis: Systematically analyzing how different policy distributions affect action magnitudes will be crucial, as this directly impacts hardware wear and overall system stability in real-world deployments.
• Sim-to-Real Transfer: The next phase will involve deploying the learned framework on an actual mini-crane platform, where direct access to target coordinates may be unavailable. Integrating UWB-based distance measurement into the reward function will facilitate this transition.
• Safe Training and Dynamics Modeling: To mitigate risks associated with abrupt or unsafe actions during early-stage exploration of physical systems, the next study will focus on developing a neural network-based dynamic model of the crane. This model can serve as a surrogate environment for pre-training agents or for simulating mechanical stress constraints.
• Task Complexity and Recurrent Policies: Further studies may also extend task complexity by introducing sequential goals or adopting recurrent architectures (e.g., LSTM/GRU) within PPO to address partial observability, particularly relevant when full-state information (such as joint velocities) is unavailable.
In summary, this work establishes the Kumaraswamy distribution as a viable and efficient alternative for continuous-action reinforcement learning in robotics. Continued research along these lines will deepen our understanding of its properties and support safer and more adaptable deployment of RL agents in complex real-world environments.
Data availability statement
The datasets presented in this article are not readily available because It is a reinforcement learning environment. The data are generated on the go. Requests to access the datasets should be directed to Davide Picchi, cGljY2hpQGlwLnJ3dGgtYWFjaGVuLmRl.
Author contributions
DP: Conceptualization, Data curation, Formal Analysis, Funding acquisition, Investigation, Methodology, Project administration, Resources, Software, Supervision, Validation, Visualization, Writing – original draft, Writing – review and editing. SB-Ç: Project administration, Resources, Supervision, Writing – review and editing.
Funding
The author(s) declare that no financial support was received for the research and/or publication of this article.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Any alternative text (alt text) provided alongside figures in this article has been generated by Frontiers with the support of artificial intelligence and reasonable efforts have been made to ensure accuracy, including review by the authors wherever possible. If you identify any issues, please contact us.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/frobt.2025.1589025/full#supplementary-material
References
Al-Babtain, A. A., Elbatal, I., Chesneau, C., and Elgarhy, M. (2021). Estimation of different types of entropies for the Kumaraswamy distribution. PLOS ONE 16, e0249027–21. doi:10.1371/journal.pone.0249027
Andersson, J., Bodin, K., Lindmark, D., Servin, M., and Wallin, E. (2021). Reinforcement learning control of a forestry crane manipulator. arXiv:2103.02315. doi:10.48550/ARXIV.2103.02315
Cho, S., and Han, S. (2022). Reinforcement learning-based simulation and automation for tower crane 3D lift planning. Automation Constr. 144, 104620. doi:10.1016/j.autcon.2022.104620
Chou, P.-W., Maturana, D., and Scherer, S. (2017). “Improving stochastic Policy gradients in continuous control with deep reinforcement learning using the beta distribution,” in Proceedings of the 34th international conference on machine learning. (PMLR), vol. 70 of proceedings of machine learning research. Editors D. Precup, and Y. W. Teh, 834–843.
Haarnoja, T., Zhou, A., Abbeel, P., and Levine, S. (2018). Soft Actor-Critic: Off-Policy maximum entropy deep reinforcement learning with a stochastic actor. doi:10.48550/ARXIV.1801.01290
Hsu, C. C.-Y., Mendler-Dünner, C., and Hardt, M. (2020). Revisiting design choices in proximal Policy optimization. arXiv:2009.10897. doi:10.48550/ARXIV.2009.10897
Kai, F., Lingzhi, Y., Dongfeng, H., Shijing, L., and Buxin, S. (2022). A study on deep reinforcement learning-based crane scheduling model for uncertainty tasks. High Temp. Mater. Process. 41, 469–481. doi:10.1515/htmp-2022-0040
Keita, M., Atsushi, Y., Takahiro, O., Masahiro, Y., Satoru, H., Michitaka, I., et al. (2020). “Simulation-based reinforcement learning approach towards construction machine automation,” in Proceedings of the 37th international symposium on automation and robotics in construction (ISARC). Furuya hiroshi” (Kitakyushu, Japan: international Association for automation and robotics in construction (IAARC)). Editor T. K. Osumi Hisashi, 457–464. doi:10.22260/ISARC2020/0064
Nalisnick, E., and Smyth, P. (2016). Stick-Breaking variational autoencoders. doi:10.48550/ARXIV.1605.06197
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and Klimov, O. (2017). Proximal Policy optimization algorithms. arXiv:1707.06347. doi:10.48550/ARXIV.1707.06347
Sutton, R. S., and Andrew, G. B. (2018). Reinforcement learning: an introduction. second edn. The MIT Press.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones, L., Gomez, A. N., et al. (2023). Attention is all you need. arXiv:1706.03762. doi:10.48550/ARXIV.1706.03762
Xiao, Y., Yang, T. Y., Pan, X., Xie, F., and Chen, Z. (2023). A reinforcement learning based construction material supply strategy using robotic crane and computer vision for building reconstruction after an earthquake [Dataset].
Keywords: machine learning, crane, construction, reinforcement learning, Kumaraswamy distribution
Citation: Picchi D and Brell-Çokcan S (2025) Exploiting the Kumaraswamy distribution in a reinforcement learning context. Front. Robot. AI 12:1589025. doi: 10.3389/frobt.2025.1589025
Received: 06 March 2025; Accepted: 22 September 2025;
Published: 30 October 2025.
Edited by:
Aysegul Ucar, Firat University, TürkiyeReviewed by:
Muhammad Iqbal, National University of Sciences and Technology, PakistanNadeem Javaid, National Yunlin University of Science and Technology, Taiwan
Copyright © 2025 Picchi and Brell-Çokcan. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Davide Picchi, cGljY2hpQGlwLnJ3dGgtYWFjaGVuLmRl