 Benjamin Davis
Benjamin Davis Michael Abbott
Michael Abbott Hannah S. Stuart
Hannah S. Stuart- 1Embodied Dexterity Group, Department of Mechanical Engineering, University of California Berkeley, Berkeley, CA, United States
- 2Design for Assistive Robotic Technologies (DART) Laboratory, Department of Mechanical Engineering, Santa Clara University, Santa Clara, CA, United States
Existing studies demonstrate that performance in reaction-based tasks can be improved using external robotic assistance without reducing the user’s sense of agency, particularly when assistance is delivered near the user’s natural reaction time. This finding has promise for assistive technologies like upper limb prostheses, where agency contributes to long-term use and users’ natural slip reflexes are hindered by reduced feedback and proprioception. However, prior studies lack the physical feedback of device movement inherent to many assistive devices like body-powered prostheses or exoskeletons where user and device are physically coupled. In this work, we explore the relationship between robotic assistance, performance, and agency when such feedback is present. We study how the timing of robotic assistance alters performance and agency, as experienced through the feedback of a body-powered transmission. We collect data from twenty participants in a simulated slip reaction task using a custom body-powered prosthesis emulator, with robotic grasp assistance provided at various delays relative to the onset of slip. Results show that, as assistance becomes more aligned with reaction times, agency increases while performance benefits are still obtained, even if users are aware of the assistance and perceive an increase in performance. Our findings suggest that in scenarios where users can physically perceive robotic assistance and its benefits, such as in body-grounded assistive technologies like body-powered prostheses or exoskeletons, temporal alignment between the user and robotic assistance plays a role in both performance and user experience.
1 Introduction
Humans quickly adjust in response to unexpected changes to grasp state during object manipulation. If an object begins to slip out of a grasp, compensatory local reflexes can begin in as little as 50 milliseconds (Macefield et al., 1996; Zangrandi et al., 2021). These unconscious reflexes, governed by our nervous system, rapidly adapt to disturbances across scenarios as we interact with a variety of objects in different environments. For prosthesis users, however, reduced sensory feedback, system latency, and unfamiliar control interfaces impede these reflexive actions (Zangrandi et al., 2021). Such users rely heavily on visual feedback and higher level cognitive processes to produce corrective reactions (Sobuh et al., 2014; Thomas et al., 2021). Reliance on visual rather than tactile feedback has been shown to delay response times in reaction time tasks (Chan and Ng, 2012) and increase cognitive loads for prosthesis users (Yamada et al., 2016). Inducing local robotic reflexes that act without conscious intervention from the user presents a potential pathway for reducing cognitive load and speeding up these response times due to faster rates of sensing, processing, and actuation.
Robotic reflexes can react to slip events in robotic manipulation (Nakagawa-Silva et al., 2019; SaLoutos et al., 2022) and improve human performance in other time-critical reaction tasks like simple reaction tasks such as screen tapping or button pressing (Kasahara et al., 2019), balance recovery (Beck et al., 2023; Emmens et al., 2018; Farkhatdinov et al., 2019), and traffic collision avoidance (Wen et al., 2021; Koerten et al., 2024). In the context of prosthetic hands, researchers show how robotic reflexes can improve grasp security by responding to slip events (Engeberg and Meek, 2013; Osborn et al., 2016; Thomas et al., 2023) or predictively adjusting grasp strength (Ray and Engeberg, 2018). These works use myoelectric prostheses, which measure muscle activity with surface electromyography (sEMG) electrodes to control motors that move the end-effector. This use of fully motorized actuation, without body-powered actuation included, allows for integration of new grasp automation strategies without considering physical interactions between the user and device. However, users frequently cite a lack of sensory feedback as a downside of using myoelectric devices (Biddiss et al., 2007). Ongoing research seeks to implement haptic feedback (Stephens-Fripp et al., 2018) or develop new neural integration methods to enhance myoelectric devices (Nghiem et al., 2015), but commercial use remains limited.
People with limb absence often use body-powered prosthetic hands, a passive alternative to myoelectric options (Biddiss and Chau, 2007). Body-powered prehensors rely on movement of the contralateral shoulder to control an end-effector mechanism without motors. This control topology, known as Extended Physiological Proprioception (EPP) (Simpson et al., 1974), provides inherent force and position feedback to the user during operation, reducing the need for artificial haptic feedback. Users of body-powered prostheses complete grasps more quickly and size their gripper apertures more accurately than those of myoelectric prostheses (Gonzalez et al., 2021; Spiers et al., 2021). However, unintended object slip remains a reason for device dissatisfaction across both device categories (Biddiss and Chau, 2007; Kyberd et al., 2007).
We therefore expect that the integration of robotic slip detection and reflexes into body-powered prostheses could improve grasp functionality and user satisfaction while maintaining the benefits of EPP inherent to such devices. Recent work demonstrates body-powered systems equipped with augmentative robotic capabilities, such as a body-powered prehensor with a robotic continuously variable transmission (McPherson et al., 2023). A demonstration of what robotic slip compensation might look like with this device is shown in the supplementary video included with this work.
Prior human factors research reveals that users prefer to remain in control of systems they operate (Shneiderman and Plaisant, 2004). This sense of agency, defined here as a person’s subjective feeling of being responsible for their actions and the associated consequences (Chambon et al., 2014), is often described with the comparator model. This framework states that agency arises from matches between the predicted sensorimotor outcome of an action and the experienced sensory feedback of that action (Blakemore et al., 2001; Chambon et al., 2014). Past work demonstrates how the presence of robotic assistance can reduce the user’s sense of agency over a system by causing misalignment between expected and actual outcomes (Berberian et al., 2012; Berberian, 2019). When the sense of agency is reduced or removed through automation, users tend to lose task motivation (Eitam et al., 2013), take less responsibility for actions (Moretto et al., 2011), and lack preparedness to solve problems that may arise (Berberian, 2019; Koerten et al., 2024). The sense of agency also has specific importance to prosthetic devices, as it contributes to device embodiment, a critical experience for device acceptance (Zbinden et al., 2022; Smail et al., 2021). These findings demonstrate that agency should be considered alongside functional improvements with robotic assistance for effective adoption.
Recent studies demonstrate how user agency can be preserved in the presence of robotic assistance. For example, individuals report an increased sense of agency if robotic assistance improves their performance in controlling a system with unpredictable latency or other disturbances (Wen et al., 2015; Aoyagi et al., 2021). This remains true even if the presence of assistance is made known (Inoue et al., 2017). These disturbances complicate the relationship between action and somatosensory feedback, making continuous comparisons between actions and somatosensory feedback difficult. This results in users relying more heavily on higher level context- and outcome-dependent cues like overall task performance to make perceptual judgments regarding their sense of agency (Moore et al., 2009). However, some researchers observe that this positive effect of performance on agency may not occur in scenarios where users have a strong feeling of control over the unassisted system (Morita et al., 2022). The timing of assistive elements shows promise as another way to modulate the sense of agency, particularly for time-critical reaction tasks. By delaying robotic assistance relative to the onset of some stimulus, individuals demonstrate improved performance in a car braking scenario while reporting comparable agency scores to unassisted conditions (Wen et al., 2021). In a tapping reaction task, Kasahara et al. show that assistance delivered in a time window aligned with normative human reaction times can lead to faster reactions with no significant decrease in agency (Kasahara et al., 2019). These works suggest that the observed preservation of agency during assistance is due to users incorrectly attributing robot-assisted actions to themselves. However, users in these studies do not receive explicit physical feedback regarding the state of the assistive agent, which may limit such misattributions if provided. Furthermore, these studies do not observe trends in agency when assistance is delivered after the user reacts. In imperfect systems where this scenario is possible, the user’s experience may be diminished.
With robotically-assisted body-powered prostheses, EPP enables users to perceive any movements of the device that are not their own, potentially disrupting their sense of agency. For example, changes in the mechanical advantage of a continuous variable transmission body-powered prosthesis (McPherson et al., 2023) could be perceived through changes in force applied to the contralateral shoulder. To develop a better understanding of the effects of robotic intervention in this context, we present the first study on the effect of robotic assistance delay when explicit physical feedback of the robot’s actions is communicated to the user. We hypothesize that, when assistance delays coincide with natural reaction times, users will suppress slip events more quickly while maintaining their sense of agency over the device in accordance with findings from Kasahara et al. (2019). As assistance becomes less temporally aligned with the user (i.e., too early or too late), we predict that the distinction between user and robot actions will become more apparent, and user agency will decrease. We also measure the user’s perceived assistance, perceived task performance, and perceived robot cooperativeness as secondary metrics and compare their trends across assistance conditions with those of agency and performance. We hypothesize that each of these perceptions will contribute to the sense of agency–i.e. that assistance which is less perceivable, more cooperative, and less noticeably beneficial will lead to a higher sense of agency. This is because we expect assistance with these subjective qualities to generate movements more closely aligned with the user’s expectations.
In this work, we present results from a slip reaction task under a variety of robotic assistance conditions using a body-powered prosthesis emulator. Section 2 describes the emulator testbed, robotic assistance, task description and protocol, performance metrics, and methods used for statistical analysis. In Section 3, we present results that highlight the effect of robotic assistance on task performance and the sense of agency. Discussion of these results, experiment limitations, and future work takes place in Section 4. We end with concluding statements in Section 5.
2 Materials and methods
2.1 Participants
Data represent a total of 20 participants (8 female, 12 male) with an average age of 26.9 (SD: 8.09) and normative upper limb function, i.e., without limb differences or amputation. No participants had past exposure to the system through previous studies. Participants were recruited from the UC Berkeley student population and surrounding communities. All experimental procedures are approved by the University of California, Berkeley Institutional Review Board protocols #2019-05-12178 and #2025-02-18248.
2.2 Testbed
To evaluate the effect of robotic assistance on the performance and agency of body-powered prostheses, we adapt the prosthesis emulator described in Abbott et al. (2021) for a virtual slip reaction task. We use an emulator to achieve faster, more efficient execution of repeated, identical trials under varying conditions. Although this limits the generalizability of our results, we aim to establish general trends in delay, performance, and agency through this controlled environment. The testbed, shown in Figure 1, is composed of three subsystems: a figure-of-nine shoulder harness, a desktop haptic interface, and an experimental graphical user interface (GUI) depicting the task in a virtual environment. While the shoulder harness and haptic interface hardware are reused from Abbott et al. (2021), we redesign the haptic interface experimental software, controller, and the GUI to provide a new robot-assisted grasping experience. This redesigned interface enables the addition of a robotic element that can simultaneously affect the virtual gripper state along with the user, and communicates the resulting force feedback to the user.
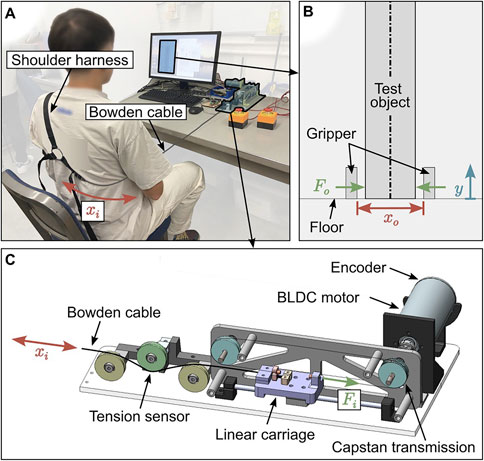
Figure 1. An overview of the prosthesis emulator testbed (A) with detailed views of the experimental GUI (B) and haptic interface (C). Motion of the user’s contralateral shoulder,
The impedance-type haptic interface, detailed in Figure 1C, provides participants with positional control of a “right-handed” virtual gripper via motion of their contralateral (left) shoulder and provides force feedback based on grasp forces generated in the virtual environment, mimicking the typical operation of body-powered prostheses. The virtual environment, pictured in Figure 1B, contains two opposing gripper fingers and an infinitely long test object between them which initially rests on a temporary “floor”. The object’s length ensures that it never drops past an unrecoverable state, allowing us to capture all performance data on a continuous scale. We have included a demonstration of the testbed in our supplemental video.
A Bowden cable connects the user’s shoulder harness to the impedance-style haptic interface, which measures positional inputs from the user and outputs force feedback back to the user. We constrain cable motion to one degree of freedom with a linear carriage and translate it into the shaft rotation of a brushless DC (BLDC) motor (Maxon, EC-i 52) using a capstan transmission. An encoder attached to the motor shaft (Maxon, ENC 16 EASY) measures the shaft rotation
where
The behavior of the test object in motion is governed by the simple one-dimensional dynamic model
which determines the object’s acceleration
2.3 Robotic assistance
In this experiment, we introduce robotic assistance as a reflexive closing of the gripper. We set the assistance profile as a linear decrease in aperture added to the user’s positional input commands, shown in the top row of Figure 2. We define the assistance using three parameters, visualized in Figure 2: 1) the delay
where
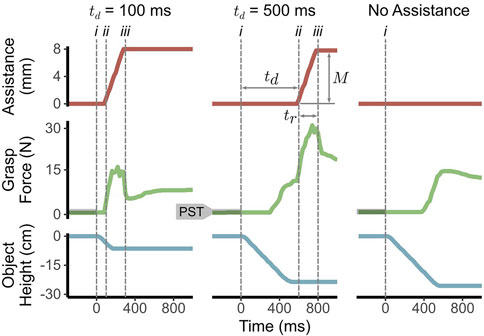
Figure 2. Sample assistance, grasp force, object height data measured over time for an individual trial from two assistance conditions (
2.4 Experimental procedure
To begin, participants sit facing a screen with the experimental GUI and are fitted with the shoulder harness. The haptic interface is homed and set to a fixed position, and the participants are instructed to reposition their chairs until the Bowden cable reaches light tension with their backs straight and shoulder blades adducted.
2.4.1 Trial protocol
Each trial consists of stopping a falling test object by closing the gripper. Initially, the object rests on a disappearing floor, as seen in Figure 1B. To begin the trial, the participants gently grasp the object with a force within a Pre-Slip Threshold (PST, shown in Figure 2) for a random duration between 0.5 and 1.5 s to limit anticipatory movements. After this threshold is met, the floor disappears and the test object begins falling. The PST is defined as 0.0491 N
2.4.2 Test conditions
To observe the effects of assistance delay
2.4.3 Experimental structure
Before collecting trial data, participants perform a warm-up of five unassisted trials and five trials with immediate assistance
2.5 Metrics
2.5.1 Task performance metrics
Force, gripper position, and object height data are recorded at a rate of 50 Hz for each experimental trial. Data from practice trials are not included in our analysis. Since the assistance delay conditions are in intervals of 100 m and expected reaction times are on the order of hundreds of milliseconds, we expect this rate to be sufficient for observing our trends of interest. The object is considered stopped once its height remains unchanged for 400 m after its initial slip. This duration is less than the required 1.5 s hold in the task, as we noted some participants would accidentally release the object early. We assess trial performance by measuring the object slip distance. We also estimate reaction times for each participant as the time required to reach an incremental increase in grasp force greater than 1 N after initial object slip under the unassisted condition. While reaction time is not a direct performance metric, we use it to contextualize results from our discrete assistance timing conditions.
2.5.2 Survey metrics
After each condition, participants answer a set of survey questions (see Table 1). Four seven-point Likert questions, adapted from previously published work on agency (Bekrater-Bodmann, 2020; Kalckert and Ehrsson, 2012), evaluate participant sense of agency. These questions are positively or negatively worded regarding the sense of agency and scored accordingly. The scores are summed to obtain an aggregate agency score between four and 28. We also measure the perceived assistance provided by each delay condition on a ten-point scale. We include two more seven-point Likert questions to measure each participant’s perceived improvement in stopping the falling object relative to the unassisted condition (Improved Performance) and the perceived cooperation of the robotic assistance in completing the task (Cooperated). We include these questions on perceived assistance, improvement, and robot cooperation, listed in Table 1, to explore what factors might contribute to the sense of agency.
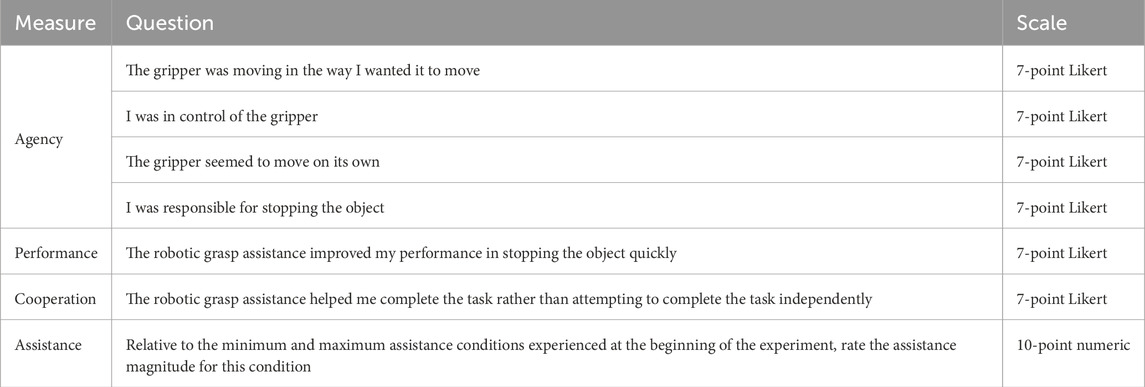
Table 1. Post-condition survey questions.
2.6 Statistical analysis
A mixed model regression evaluates the effects of assistance delay on each metric. We treat assistance delay as the primary fixed effect, with condition order (CO) and trial number (TN) as covariates to account for potential learning or fatigue effects. We consider delay as an ordinal variable to enable pairwise comparisons between conditions. The unassisted condition is treated as infinitely delayed assistance and ordered accordingly. We use polynomial contrasts to fit a seventh-order polynomial to these eight ordinal conditions, but present only up to quartic trends (.L, .Q, .C, and 0.4̂) for simplicity. To achieve model parsimony for each dependent variable, we use likelihood ratio tests to identify significant autoregressive effects and interaction effects. These comparisons are detailed in the Supplementary Material.
To analyze slip distance results, we use a linear mixed model and a first-order autoregressive correlation structure for observed autocorrelation of lag 1. We use cumulative link mixed models for agency, perceived performance, perceived robot cooperation, and perceived magnitude of assistance measures, as recommended in Taylor et al. (2023) for ordinal data. For all models, participant ID is added as a random effect to account for within-subject correlation.
Post-hoc pairwise comparisons for all dependent variables, except perceived robot cooperation, use the Tukey’s Honest Significant Difference test, which corrects for family-wise error rate. Comparisons are made between the model-based estimated marginal means for each assistance delay condition. We focus only on pairwise comparisons of assistance conditions to the unassisted condition in this work with the aim of evaluating the effect of assistance on performance and agency. Since the perceived robot cooperation question assumes that robotic assistance was present, answers from the unassisted condition are not considered and no pairwise comparisons are made. Regression coefficients reveal trends in all metrics for different assistance delay values. Model outputs can be found as Supplementary Material.
To further investigate the effect of assistance delay on agency, we analyze the relationship between agency and the timing of assistance relative to median subject reaction times
All statistical analyses are performed with R v4.3.1. Linear mixed modeling for slip distance is achieved with the “nlme” package (Pinheiro et al., 2023), and cumulative link mixed modeling for survey metrics is achieved with the “ordinal” package (Christensen, 2023). Estimated marginal means are calculated with the “emmeans” package (Lenth, 2024). The repeated measures correlations are accomplished with the “rmcorr” package (Linden, 2021).
Due to the complexity of our models, we performed a Monte Carlo power analysis with preliminary data to estimate the required sample size. We selected two pairwise comparisons to assess, with effect sizes pulled from the preliminary data: (1) we evaluated agency scores between the 300 m and 400 m delay conditions, assuming an odds ratio of 9.6 in favor of the 400 m condition, and (2) we compared drop distance between the 400 m and unassisted conditions, assuming an effect size of 6.4 cm. Synthetic data was sampled based on variances observed in initial data and analyzed with the same model structures used for our main analysis, i.e., a linear mixed model for drop distance and a cumulative link mixed model for agency. For agency, the 300 m–400 m pairwise comparison was selected as our primary comparison of interest, as we expected reaction times to be aligned with one of these conditions more than the other and thus show a slightly higher agency score based on our hypothesis. We selected the 400 m - unassisted pairwise comparison for drop distance, since we expected the 400 m condition to be the most delayed assistance that still provides a performance benefit. With 10,000 replications, both pairwise conditions showed
3 Results
3.1 Task performance
As expected, longer assistance delay generally results in a larger object slip distance, as shown in Figure 3A. Participants exhibit a positive linear effect (
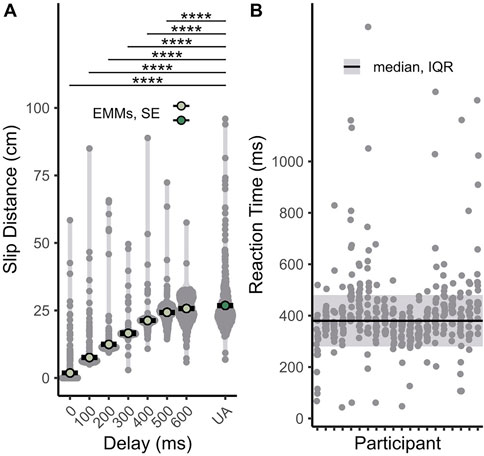
Figure 3. Summary of results from slip distance across different assistance delays (A) and participant reaction times (B). In (A), smaller grey dots represent raw data points, and larger colored dots represent estimated marginal means. Black horizontal bars depict standard error. The unassisted condition is represented by the “UA” label and dark green dot. Asterisks denote significant pairwise comparisons between estimated marginal means of the assisted and the unassisted conditions (*
In the unassisted trials, we estimate the median reaction time to be 380 m (interquartile range, IQR: 100 m) across all participants, shown in Figure 3B. This average is slightly longer than laboratory-recorded reaction times to visual stimuli of 200–300 m (Beggs and Howarth, 1970; Keele and Posner, 1968). We suspect that reaction times are slower due to an unfamiliar shoulder-driven mode of control for users and a larger and slower joint in the shoulder than the hand or fingers typically used in reaction time tests.
In the performance metrics, several visual outliers show abnormally low slip distance (Figure 3A) and fast reaction times (Figure 3B). We attribute these results to participants anticipating the onset of slip. Visual outliers with unusually high slip distances also represent cases of poor performance. Long reaction times in Figure 3B are likely due to loss of concentration. However, large slip distances in Figure 3A indicate that the proposed method of assistance does not consistently improve task performance. This outcome, possibly due to inconsistent human input, is further explored in Section 4.
3.2 Subject survey
As shown in Figure 4A, increases in assistance delay generally improve participants’ sense of agency, with an observed positive linear effect of delay on agency (
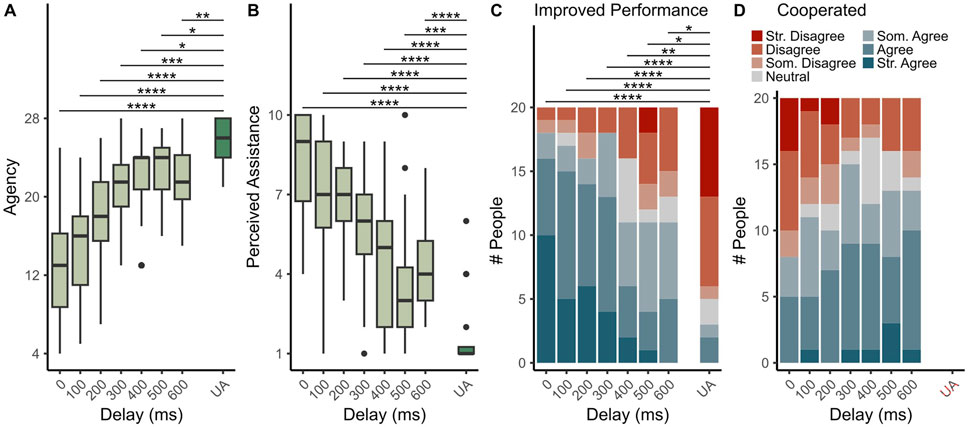
Figure 4. Summary of survey results regarding agency (A), perceived assistance (B), perceived performance (C), and perceived robot cooperation (D). The unassisted condition is represented by the “UA” label and dark green boxes in (A) and (B). Asterisks denote significant pairwise comparisons between estimated marginal means of the assisted and the unassisted conditions (*
Figure 4B shows that subjects perceive less assistance at longer delays (
Subjects perceive a decrease in performance with longer assistance delays (
Results in Figure 4D show that robotic assistance feels more cooperative to subjects as its delay increases (
Figure 5 shows a significant, moderate positive correlation between agency and relative assistance timing when assistance is delivered before each subject’s average reaction time
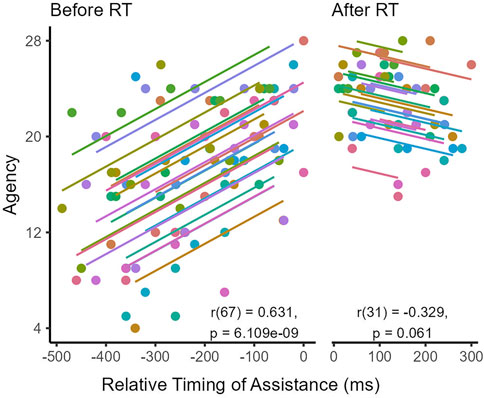
Figure 5. Repeated measures correlations between agency and assistance timing relative to each subject’s median reaction time (RT), done separately for before and after RT data. Annotations list degrees of freedom, strength, and significance for each correlation.
3.3 Statistical interactions
We observed significant interactions with condition order for slip distance (CO.L:
4 Discussion
Our performance and agency results show that robotically improving slip reactions with our emulator reduces the user’s sense of agency. These findings reaffirm that robotic assistance reduces user agency in shared control systems (Berberian et al., 2012; Berberian, 2019) and expand this idea into a physical human-robot interaction scenario. However, our results also show that this tradeoff is dependent on the relative timing of assistance. We find that agency increases as assistance is delayed to align with user reaction times (i.e.,
A few subjects report high agency scores while failing to identify the presence of assistance when it aligns with their reaction times, perhaps mistaking robotic movements as their own. This phenomenon is hypothesized in prior work where physical feedback of assistance is not apparent (Kasahara et al., 2019; Inoue et al., 2017; Morita et al., 2022). In these works, authors propose that when feedback of task outcomes aligns closely enough with the user’s expectations, robot-assisted actions can be self-attributed. In our study, results indicate that the presence of assistance is largely recognized, likely due to the physical feedback of assistance delivered to the user. Still, subjects exhibit high levels of agency, particularly with delays of 400–500 m. Assistance in these conditions, although noticeable, is described by subjects as “natural” and “synchronous” and perceived by a majority as cooperative. These comments and results suggest that the retention of agency is not primarily due to the misattribution of gripper movement. Instead, we propose that force feedback makes the robotic assistance explicit, leading users to recognize the robot as a co-actor capable of contributing to the task’s outcome. In this case, users might derive their sense of agency from their perceptions of the robot’s intentions (Navare et al., 2024). Another explanation for high levels of agency even when assistance is noticeable is that users may be embodying the device as a tool (Gibson, 2014; Maravita and Iriki, 2004). In this case, the user may understand that the robotic reflex enhances the device’s existing grasp affordance and learn how to utilize it appropriately. However, this incorporation of the device into the user’s own body schema requires expertise, which may or may not be obtained during our 2 hour experiment (Weser and Proffitt, 2021). In either case, based on our results, we propose that the retention of agency during robotic assistance is still possible, provided the robot acts synchronously and predictably.
The results in Figure 3A show that even when performance is improved, the object can still fall large distances (
Visual outliers present in the performance data (Figure 3A) show that the proposed assistance to body-powered grasping does not always suppress slip fully. We suspect that these results are due to the shared control scheme of a robot-assisted body-powered prosthesis. Since users are always mechanically coupled to the end-effector, they can counteract the provided assistance through their own movements and decrease the system’s overall effectiveness. Thus, consistent improved performance requires some level of cooperation, and therefore knowledge of the system, from the user to avoid inadvertently diminishing the effects of assistance.
Perceived performance improvements through assistance at any delay may lead to positive outcomes like increased motivation (Almagro et al., 2020) and confidence (O’Brien et al., 2001), even when assistance has not improved actual performance (i.e.,
Though assistance aligned with measured reaction times could improve slip suppression and maintain the user’s sense of agency, subjects express that other timings may also have benefits. For assistance provided with little or no delay (
4.1 Limitations and future work
This study is performed with a sample population of twenty individuals with a relatively low average age and without limb difference. While this population of naive users can provide insight on the experience of individuals new to limb loss, it prevents us from understanding the experiences of long-term prosthesis users and different age populations less familiar with robotic systems. Future studies with an increased number of participants from a broader population, as well as the inclusion of prosthesis users, is necessary to generalize the results of this work.
Our experimental design balances experimental resolution and breadth, which leads to some limitations. Our choice of delay conditions prevents us from using methodologies that make precise conclusions on optimal assistance timing, such as that proposed by Kasahara et al. (2019), and capturing events where assistance is much later than user reaction times. The range and granularity of delays could be expanded to obtain more detailed and comprehensive trends in all metrics. Furthermore, subjects interact with only one set of object properties (e.g., mass, size, and stiffness) for an unbreakable object and one set of assistance magnitude
The testbed used in this work isolates the force and proprioceptive feedback of body-powered prosthesis operation. Yet, the virtual environment does not provide sensations of weight or momentum of the test object, which has been shown to affect reaction times and compensation strategies (Häger-Ross and Johansson, 1996). The mechatronic system also introduces more latency and exhibits lower precision than the purely mechanical connection present in body-powered devices. Future work will seek to implement robotic slip reflexes in physical robot-augmented body-powered devices (e.g., McPherson et al. (2023); Mcpherson et al. (2020)) and evaluate how trends in performance and agency are impacted by use of a physical device.
While our findings are promising for the incorporation of physically perceptible assistance in wearable devices, we acknowledge that the form of feedback subjects receive in our study is unique to body-powered prostheses. Translation of our results to other devices with different paths of control and feedback requires future study.
5 Conclusion
In this work, we explore the effect of automated assistance delay on task performance and user agency using a desktop body-powered prosthesis emulator with a robotic slip reflex. We find that as robotic assistance is provided closer to subject reaction times, perceived agency increases and performance benefits are still obtained. This occurs even though subjects typically recognize the presence of assistance, likely due to the force feedback present in the system, and perceive an improvement in performance. Qualitative results show that subjects feel “in sync” with the assistance when provided at these delays. Our findings support unique considerations for future design of robotic assistance, particularly for body-grounded assistive technologies like body-powered prostheses and exoskeletons where robotic movements cannot be masked. In these situations, we propose reaction time-aligned assistance as a promising way to improve reflex-based performance with minimal reduction in user agency.
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Ethics statement
The studies involving humans were approved by University of California, Berkeley Institutional Review Board (IRB) under protocols #2019-05-12178 and #2025-02-18248. The studies were conducted in accordance with the local legislation and institutional requirements. The participants provided their written informed consent to participate in this study.
Author contributions
BD: Conceptualization, Formal Analysis, Investigation, Methodology, Software, Visualization, Writing – original draft. MA: Conceptualization, Formal Analysis, Methodology, Software, Visualization, Writing – review and editing. HS: Writing – review and editing, Conceptualization.
Funding
The author(s) declare that financial support was received for the research and/or publication of this article. This material is based upon work supported by the National Science Foundation CAREER Program under Grant No. 2237843, the National Science Foundation Graduate Research Fellowship under Grant Nos. 1752814 and 2146752, and the University of California, Berkeley. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the funding sources.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Any alternative text (alt text) provided alongside figures in this article has been generated by Frontiers with the support of artificial intelligence and reasonable efforts have been made to ensure accuracy, including review by the authors wherever possible. If you identify any issues, please contact us.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/frobt.2025.1675955/full#supplementary-material
References
Abbott, M. E., and Stuart, H. S. (2023). Characterizing the force-motion tradeoff in body-powered transmission design. IEEE Trans. Neural Syst. Rehabilitation Eng. 31, 3064–3074. doi:10.1109/TNSRE.2023.3297549
Abbott, M. E., Fajardo, J. D., Lim, H., and Stuart, H. S. (2021). Kinesthetic feedback improves grasp performance in cable-driven prostheses. IEEE International Conference on Robotics and Automation ICRA, 10551–10557. doi:10.1109/ICRA48506.2021.9561341
Akaike, H. (1998). “Information theory and an extension of the maximum likelihood principle,” in Selected papers of hirotugu akaike. Editors E. Parzen, K. Tanabe, and G. Kitagawa (New York, NY: Springer New York), 199–213. doi:10.1007/978-1-4612-1694-0_15
Almagro, B. J., Sáenz-López, P., Fierro-Suero, S., and Conde, C. (2020). Perceived performance, intrinsic motivation and adherence in athletes. Int. J. Environ. Res. Public Health 17, 9441. doi:10.3390/ijerph17249441
Aoyagi, K., Wen, W., An, Q., Hamasaki, S., Yamakawa, H., Tamura, Y., et al. (2021). Modified sensory feedback enhances the sense of agency during continuous body movements in virtual reality. Sci. Rep. 11, 2553. doi:10.1038/s41598-021-82154-y
Beck, O. N., Shepherd, M. K., Rastogi, R., Martino, G., Ting, L. H., and Sawicki, G. S. (2023). Exoskeletons need to react faster than physiological responses to improve standing balance. Sci. Robotics 8, eadf1080. doi:10.1126/scirobotics.adf1080
Beggs, W. D. A., and Howarth, C. I. (1970). Movement control in a repetitive motor task. Nature 225, 752–753. doi:10.1038/225752a0
Bekrater-Bodmann, R. (2020). Perceptual correlates of successful body–prosthesis interaction in lower limb amputees: psychometric characterisation and development of the Prosthesis Embodiment Scale. Sci. Rep. 10, 14203. doi:10.1038/s41598-020-70828-y
Berberian, B. (2019). Man-Machine teaming: a problem of Agency. IFAC-PapersOnLine 51, 118–123. doi:10.1016/j.ifacol.2019.01.049
Berberian, B., Sarrazin, J.-C., Blaye, P. L., and Haggard, P. (2012). Automation technology and sense of control: a window on human agency. PLOS ONE 7, e34075. doi:10.1371/journal.pone.0034075
Biddiss, E. A., and Chau, T. T. (2007). Upper limb prosthesis use and abandonment: a survey of the last 25 years. Prosthetics and Orthot. Int. 31, 236–257. doi:10.1080/03093640600994581
Biddiss, E., Beaton, D., and Chau, T. (2007). Consumer design priorities for upper limb prosthetics. Disabil. Rehabilitation Assistive Technol. 2, 346–357. doi:10.1080/17483100701714733
Blakemore, S. J., Frith, C. D., and Wolpert, D. M. (2001). The cerebellum is involved in predicting the sensory consequences of action. Neuroreport 12, 1879–1884. doi:10.1097/00001756-200107030-00023
Chambon, V., Sidarus, N., and Haggard, P. (2014). From action intentions to action effects: how does the sense of agency come about? Front. Hum. Neurosci. 8, 320. doi:10.3389/fnhum.2014.00320
Chan, A., and Ng, A. (2012). Finger response times to visual, auditory and tactile modality stimuli. Lect. Notes Eng. Comput. Sci. 2196, 1449–1454.
Eitam, B., Kennedy, P. M., and Tory Higgins, E. (2013). Motivation from control. Exp. Brain Res. 229, 475–484. doi:10.1007/s00221-012-3370-7
Emmens, A. R., Van Asseldonk, E. H. F., and Van Der Kooij, H. (2018). Effects of a powered ankle-foot orthosis on perturbed standing balance. J. NeuroEngineering Rehabilitation 15, 50. doi:10.1186/s12984-018-0393-8
Engeberg, E. D., and Meek, S. G. (2013). Adaptive sliding mode control for prosthetic hands to simultaneously prevent slip and minimize deformation of grasped objects. IEEE/ASME Trans. Mechatronics 18, 376–385. doi:10.1109/TMECH.2011.2179061
Farkhatdinov, I., Ebert, J., Van Oort, G., Vlutters, M., Van Asseldonk, E., and Burdet, E. (2019). Assisting human balance in standing with a robotic exoskeleton. IEEE Robotics Automation Lett. 4, 414–421. doi:10.1109/LRA.2018.2890671
Gibson, J. J. (2014). The ecological approach to visual perception: classic edition. New York, NY: Psychology press. doi:10.4324/9781315740218
Gonzalez, M. A., Lee, C., Kang, J., Gillespie, R. B., and Gates, D. H. (2021). Getting a grip on the impact of incidental feedback from body-powered and myoelectric prostheses. IEEE Trans. Neural Syst. Rehabilitation Eng. 29, 1905–1912. doi:10.1109/TNSRE.2021.3111741
Häger-Ross, C., and Johansson, R. S. (1996). Nondigital afferent input in reactive control of fingertip forces during precision grip. Exp. Brain Res. 110, 131–141. doi:10.1007/BF00241382
Inoue, K., Takeda, Y., and Kimura, M. (2017). Sense of agency in continuous action: assistance-induced performance improvement is self-attributed even with knowledge of assistance. Conscious. Cognition 48, 246–252. doi:10.1016/j.concog.2016.12.003
Kalckert, A., and Ehrsson, H. (2012). Moving a rubber hand that feels like your own: a dissociation of ownership and agency. Front. Hum. Neurosci. 6, 40. doi:10.3389/fnhum.2012.00040
Kasahara, S., Nishida, J., and Lopes, P. (2019). “Preemptive action: accelerating human reaction using electrical muscle stimulation without compromising agency,”. New York, NY, USA: Association for Computing Machinery, 1–15. doi:10.1145/3290605.3300873
Keele, S. W., and Posner, M. I. (1968). Processing of visual feedback in rapid movements. J. Exp. Psychol. 77, 155–158. doi:10.1037/h0025754
Koerten, K. O., Abbink, D. A., and Zgonnikov, A. (2024). Haptic shared control for dissipating phantom traffic jams. IEEE Trans. Human-Machine Syst. 54, 11–20. doi:10.1109/THMS.2023.3315519
Kyberd, P. J., Wartenberg, C., Sandsjö, L., Jönsson, S., Gow, D., Frid, J., et al. (2007). Survey of upper-extremity prosthesis users in Sweden and the United Kingdom. JPO J. Prosthetics Orthot. 19, 55–62. doi:10.1097/JPO.0b013e3180459df6
Linden, A. (2021). RMCORR: stata module to compute a correlation for data with repeated measures. Stat. Softw. Components S458971.
Macefield, V. G., Häger-Ross, C., and Johansson, R. S. (1996). Control of grip force during restraint of an object held between finger and thumb: responses of cutaneous afferents from the digits. Exp. Brain Res. 108, 155–171. doi:10.1007/BF00242913
Maravita, A., and Iriki, A. (2004). Tools for the body (schema). Trends Cognitive Sci. 8, 79–86. doi:10.1016/j.tics.2003.12.008
McPherson, A. I. W., Patel, V. V., Downey, P. R., Abbas Alvi, A., Abbott, M. E., and Stuart, H. S. (2020). “Motor-augmented wrist-driven orthosis: flexible grasp assistance for people with spinal cord injury,” in 2020 42nd annual international Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), 4936–4940. doi:10.1109/EMBC44109.2020.9176037
McPherson, A. I., Abbott, M. E., White, W., Gloumakov, Y., and Stuart, H. S. (2023). “A wearable testbed for studying variable transmission in body-powered prosthetic gripping,” in 2023 International Conference on Rehabilitation robotics (ICORR), 1–6. doi:10.1109/ICORR58425.2023.10304687
Moore, J. W., Wegner, D. M., and Haggard, P. (2009). Modulating the sense of agency with external cues. Conscious. Cognition 18, 1056–1064. doi:10.1016/j.concog.2009.05.004
Moretto, G., Walsh, E., and Haggard, P. (2011). Experience of agency and sense of responsibility. Conscious. Cognition 20, 1847–1854. doi:10.1016/j.concog.2011.08.014
Morita, T., Zhu, Y., Aoyama, T., Takeuchi, M., Yamamoto, K., and Hasegawa, Y. (2022). Auditory feedback for enhanced sense of agency in shared control. Sensors Basel, Switz. 22, 9779. doi:10.3390/s22249779
Nakagawa-Silva, A., Thakor, N. V., Cabibihan, J.-J., and Soares, A. B. (2019). A bio-inspired slip detection and reflex-like suppression method for robotic manipulators. IEEE Sensors J. 19, 12443–12453. doi:10.1109/JSEN.2019.2939506
Navare, U. P., Ciardo, F., Kompatsiari, K., De Tommaso, D., and Wykowska, A. (2024). When performing actions with robots, attribution of intentionality affects the sense of joint agency. Sci. Robotics 9, eadj3665. doi:10.1126/scirobotics.adj3665
Nghiem, B. T., Sando, I. C., Gillespie, R. B., McLaughlin, B. L., Gerling, G. J., Langhals, N. B., et al. (2015). Providing a sense of touch to prosthetic hands. Plastic Reconstr. Surg. 135, 1652–1663. doi:10.1097/PRS.0000000000001289
Osborn, L., Kaliki, R. R., Soares, A. B., and Thakor, N. V. (2016). Neuromimetic event-based detection for closed-loop tactile feedback control of upper limb prostheses. IEEE Trans. Haptics 9, 196–206. doi:10.1109/TOH.2016.2564965
O’Brien, G., Haughton, A., and Flanagan, B. (2001). Interns’ perceptions of performance and confidence in participating in and managing simulated and real cardiac arrest situations. Med. Teach. 23, 389–395. doi:10.1080/01421590120057049
Ray, Z., and Engeberg, E. D. (2018). Human-inspired reflex to autonomously prevent slip of grasped objects rotated with a prosthetic hand. J. Healthc. Eng. 2018, 1–11. doi:10.1155/2018/2784939
SaLoutos, A., Stanger–Jones, E., and Kim, S. (2022). “Fast reflexive grasping with a proprioceptive teleoperation platform,” in 2022 IEEE/RSJ international conference on intelligent robots and systems (IROS), 6213–6220. doi:10.1109/IROS47612.2022.9981383
Shneiderman, B., and Plaisant, C. (2004). Designing the user interface: strategies for effective human-computer interaction. 4th ed edn. Boston: Pearson/Addison Wesley.
Simpson, D. C. (1974). The choice of control system for the multimovement prosthesis: Extended physiological proprioception (epp). The control of upper-extremity prostheses and orthoses, 146–150.
Smail, L. C., Neal, C., Wilkins, C., and Packham, T. L. (2021). Comfort and function remain key factors in upper limb prosthetic abandonment: findings of a scoping review. Disabil. Rehabilitation Assistive Technol. 16, 821–830. doi:10.1080/17483107.2020.1738567
Sobuh, M. M., Kenney, L. P., Galpin, A. J., Thies, S. B., McLaughlin, J., Kulkarni, J., et al. (2014). Visuomotor behaviours when using a myoelectric prosthesis. J. NeuroEngineering Rehabilitation 11, 72. doi:10.1186/1743-0003-11-72
Spiers, A. J., Cochran, J., Resnik, L., and Dollar, A. M. (2021). Quantifying prosthetic and intact limb use in upper limb amputees via egocentric video: an unsupervised, at-home study. IEEE Trans. Med. Robotics Bionics 3, 463–484. doi:10.1109/TMRB.2021.3072253
Stephens-Fripp, B., Alici, G., and Mutlu, R. (2018). A review of non-invasive sensory feedback methods for transradial prosthetic hands. IEEE Access 6, 6878–6899. doi:10.1109/ACCESS.2018.2791583
Taylor, J. E., Rousselet, G. A., Scheepers, C., and Sereno, S. C. (2023). Rating norms should be calculated from cumulative link mixed effects models. Behav. Res. Methods 55, 2175–2196. doi:10.3758/s13428-022-01814-7
Thomas, N., Ung, G., Ayaz, H., and Brown, J. D. (2021). Neurophysiological evaluation of haptic feedback for myoelectric prostheses. IEEE Trans. Human-Machine Syst. 51, 253–264. doi:10.1109/THMS.2021.3066856
Thomas, N., Fazlollahi, F., Kuchenbecker, K. J., and Brown, J. D. (2023). The utility of synthetic reflexes and haptic feedback for upper-limb prostheses in a dexterous task without direct vision. IEEE Trans. Neural Syst. Rehabilitation Eng. 31, 169–179. doi:10.1109/TNSRE.2022.3217452
Wen, W., Yamashita, A., and Asama, H. (2015). The sense of agency during continuous action: performance is more important than action-feedback association. PLOS ONE 10, e0125226. doi:10.1371/journal.pone.0125226
Wen, W., Yun, S., Yamashita, A., Northcutt, B. D., and Asama, H. (2021). Deceleration assistance mitigated the trade-off between sense of agency and driving performance. Front. Psychol. 12, 643516. doi:10.3389/fpsyg.2021.643516
Weser, V. U., and Proffitt, D. R. (2021). Expertise in tool use promotes tool embodiment. Top. Cognitive Sci. 13, 597–609. doi:10.1111/tops.12538
Yamada, H., Yamanoi, Y., Wakita, K., and Kato, R. (2016). “Investigation of a cognitive strain on hand grasping induced by sensory feedback for myoelectric hand,” in 2016 IEEE international conference on robotics and automation (ICRA), 3549–3554. doi:10.1109/ICRA.2016.7487537
Zangrandi, A., D’Alonzo, M., Cipriani, C., and Di Pino, G. (2021). Neurophysiology of slip sensation and grip reaction: insights for hand prosthesis control of slippage. J. Neurophysiology 126, 477–492. doi:10.1152/jn.00087.2021
Zbinden, J., Lendaro, E., and Ortiz-Catalan, M. (2022). Prosthetic embodiment: systematic review on definitions, measures, and experimental paradigms. J. NeuroEngineering Rehabilitation 19, 37. doi:10.1186/s12984-022-01006-6
Keywords: robotic assistance, prosthetic hand, body-powered, sense of agency, slip reflex
Citation: Davis B, Abbott M and Stuart HS (2025) Agency-preserving robotic assistance for grasp slip recovery in body-powered prostheses. Front. Robot. AI 12:1675955. doi: 10.3389/frobt.2025.1675955
Received: 29 July 2025; Accepted: 22 September 2025;
Published: 09 October 2025.
Edited by:
Kunpeng Yao, University of Leeds, United KingdomReviewed by:
M.Neela Harish, Easwari Engineering College, IndiaBalagopal Raveendranath, Texas Tech University, United States
Copyright © 2025 Davis, Abbott and Stuart. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Hannah S. Stuart, aHN0dWFydEBiZXJrZWxleS5lZHU=