 Jizhong Wu
Jizhong Wu Ying Shi1
Ying Shi1- 1Bohai Rim Energy Research Institute, Northeast Petroleum University, Daqing, China
- 2Institute of Computer Science, East China University of Technology, Nanchang, China
We have developed a migration scheme that can compensate absorption and dispersion with effective
1 Introduction
The dissipation of seismic energy is caused by the anelasticity of the subsurface medium, which will decrease the amplitude and modify the phase. In this dissipative medium, as the propagation distance of the seismic wave increases, the attenuation of the seismic wave becomes more serious. Therefore, seismic waves in deep and ultra-deep stratums face the problem of lower resolution due to dissipation. It is crucial to find an appropriate method to eliminate the absorption and dispersion effects of seismic waves for higher resolution. We commonly use the quality factor
An optimal migration aperture can improve the signal-to-noise ratio (S/N) of imaging results. Schleicher et al. (1997) pointed out that the Fresnel zone is an optimal migration aperture. The signal outside the Fresnel zone does not contribute to imaging but brings noise and artifacts, which reduces the quality of the imaging results (Chen 2004; Marfurt 2006; Klokov and Fomel 2012a; Yu et al., 2013). However, the low S/N of field data and underground complex structures make an accurate Fresnel zone estimation challenging. In recent years, some articles have realized the estimation of Fresnel zones in a simple domain, by constructing a migrated dip-angle gather in the time or depth domains (Zhang et al., 2016; Li et al., 2018; Cheng et al., 2020). Zhang et al. (2016) has applied conventional PSTM to generate migrated dip-angle gathers for Fresnel zone estimation during deabsorption of the PSTM process. Cheng et al. (2020) used a modified VGGNet (A convolutional neural network was developed by the University of Oxford’s Visual Geometry Group and Google DeepMind in 2014) to extract Fresnel zones from migrated dip-angle gathers, which is a useful attempt at deep learning for Fresnel zone estimation. However, these Fresnel zone estimation methods are all suitable for dip-angle gathers generated by conventional migration methods, and little research has been carried out on that using compensated dip-angle gathers with a high resolution generated by compensated migration methods.
The quality factor
This article takes the estimations of the optimal aperture and effective
2 PSTM With Compensation Based on Effective Q
By following Zhang et al. (2013), a modified PSTM with compensation based on the effective Q model is expressed as
where
3 Identification of Fresnel Zones Using Deep Learning
Three separate sections are considered to introduce the theory of deep learning–based automated Fresnel zone extraction. The first section makes a review of migrated dip-angle gathers.
The second section introduces the architecture of the deep neural network adopted, including the design of U-Net input and output patterns and different types of layers in the network. The final section gives the loss function and training details in seeking optimal weights and biases of the network.
3.1 Review of Migrated Dip-Angle Gathers
Summing the migrated traces within Fresnel zones can produce a high S/N imaging profile. The migrated dip-angle gather supplies a simple domain that makes a visual pickup of Fresnel zones possible, which are constructed by sorting and summing the migrated results in the time or depth domains according to the dip angle (Zhang et al., 2016; Cheng et al., 2020). Different from the conventional migrated dip-angle gather, the compensated migrated dip-angle gather has the characteristics of high resolution and thin events. Therefore, the label data and training parameters of the trained network for conventional migrated dip-angle gathers must be relabeled and trained respectively when the neural network is applied to identify Fresnel zones using compensated migrated dip-angle gathers. In the next section, we will discuss how to use compensated dip-angle gathers to determine Fresnel zones of 2D seismic data. Figure 1 shows the geometrical relationship about the dip angle (Zhang et al., 2016). The angle can be expressed as follows:
where
where n denotes the number of seismic traces,
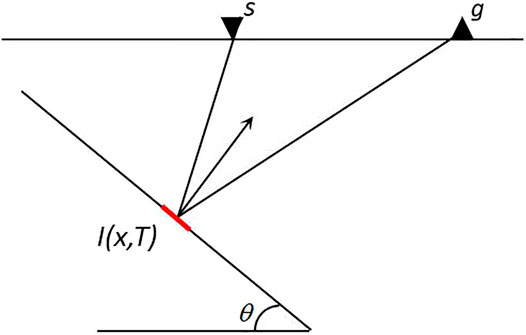
FIGURE 1. Illustration of the generation of a dip-angle gather. Points s and g denote the shot and receiver, respectively, and point I is the imaging point.
The dip-angle gather shows a curved reflected event (Klokov and Fomel 2012b), and its vertex is the stationary-phase point (Cheng et al., 2020). The Fresnel zone is within half a wavelength near the stationary-phase point. Since the Fresnel zone is easy to identify in the dip-angle gather, we can pick it up through the dip-angle gather and obtain a high S/N migrated result by summing the Fresnel zones, but in practice, estimating Fresnel zones through dip-angle gathers will become challenging because dip-angle gathers will become correspondingly more complicated due to the low S/N of field data and underground complex structures, especially for imaging results with compensating absorption and dispersion since their dip-angle gathers differ in S/N and resolution from those generated by conventional migration, which add additional complexity. Many manual modifications to the Fresnel zone boundaries are required, which is a time-consuming and difficult task.
3.2 U-Net Architecture
Deep learning can think and process data just like the human brain, showing its superior capability in many fields in recent years (LeCun et al., 2015). It has multi-layer nonlinear activation function, which can discover hidden features in complex high-dimensional data by simulating signal transformation. Convolutional neural networks (CNNs) are currently the most successful and extensive application in deep learning, which connect input and output through multi-layer convolution. U-Net, a special type of CNN, was originally an auto-encoder–decoder network designed for medical image segmentation (Ronneberger, et al., 2015; A. Sevastopolsky, 2017; Wu et al., 2019; Zhang et al., 2021). We use U-Net to identify the left and right boundaries in the dip-angle gathers as the boundaries of Fresnel zones because one important reason is that U-Net can deliver a satisfactory performance even if the size of the training set is not very large. As shown in Figure 2, the main structure of the network includes two parts, down (encoder) and up (decoder), presenting a symmetrical form. Different levels of networks have different functions. The shallow layer is employed to solve the pixel positioning problem, while the deep layer is used to classify pixels. In the contraction path on the left, each step consists of two 3 × 3 convolution layers, followed by a rectified linear unit (ReLU) (Nair and Hinton, 2010; Krizhevsky et al., 2012) and a 2 × 2 max-pooling operation with stride 2 for downsampling. Symmetrically, each step on the right expansive path consists of a 2 × 2 upsampling operation with the same stride and two convolutional layers to halve feature channels. The sigmoid activation function is applied to the last channel feature vectors to produce a probability map of the output with the same size as the input. The skip connection is used in each upsampling operation, instead of directly monitoring and loss back-transmission on high-level semantic features, to integrate more low-level features into the finally recovered feature map. After building the network, we feed small volumes of seismic images generated by PSTM with compensation, together with corresponding labels. Each data volume contains 128 2D images with a size of 128 × 128. In order to avoid the odd-sized feature map encountered by the pooling layer, the same-padding convolution process was adopted in each step of the network.
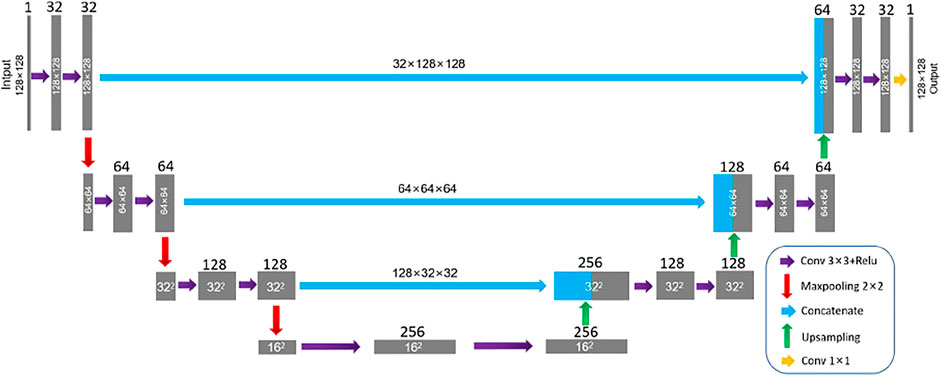
FIGURE 2. Simplified U-Net architecture. The black number describes the number of channels in feature maps. The purple arrow represents convolution-ReLU operation. The red arrow indicates the max-pooling operation which downsamples feature maps while the green arrow means the upsampling process. The blue arrow is the shortcut concatenating feature maps from shallow to deep layers.
3.3 Loss Function and Training
Network training uses a loss function to represent the difference between the true Fresnel zones and the predictions. The update of the parameters in the network is realized via the loss backpropagation (Rumelhart et al., 1986; Hecht-Nielsen, 1989), which is commonly used in the gradient descent optimization algorithm to iteratively adjust weights and biases of the neurons by calculating the gradient of the loss function. We consider the Fresnel zone identification problem as a binary segmentation problem; in other words, the output of the network is a probability distribution of 0–1, and the binary cross-entropy loss function is generally adopted:
where n is the number of pixels,
where
Given one thousand images of dip-angle gathers for training and the corresponding true segmentations as labels, training a given model and optimizing the parameters is the goal of training. The labels here are established by manual interpretation and labeling, with labeling ones on true boundaries and zeros elsewhere. Figure 3 shows three randomly seismic images of different dip angle gathers with their corresponding labels. We prepared another 400 dip-angle gathers for validation and testing, of which 60% are used for validation and 40% for testing. In general, a validation set is used to evaluate the model during the training process, fine-tune hyperparameters, and perform model selection, while the testing set is used to evaluate the model. The network takes in the images and outputs 2D boundary distribution probability maps. Cheng et al. (2020) used a modified VGGNet to identify the Fresnel boundary, and the output of his network is a one-dimensional probability distribution map. In our research, we employ the U-net to identify the Fresnel boundary, and its output is a two-dimensional probability distribution map. The U-Net is essentially a fully convolutional network, and its output is different from the VGGNet’s (Wu et al., 2021). Although Cheng’s method is suitable for dip-angle gathers generated by conventional migration methods and the U-net proposed is carried out on compensated dip-angle gathers with high resolution, the steps of the two methods in learning and training are roughly the same, and both need to pre-process the data, and both use training to optimize network parameters. In order to improve the convergence of U-Net training and balance the numerical difference between training data and prediction data, the input image needs to be normalized. Adam method (Kingma and Ba, 2014) was adopted to optimize network parameters, and the default learning rate was set to 0.001. The Adam method is designed to combine the advantages of two methods: AdaGrad (Duchi et al., 2011), which works well with sparse gradients, and RMSProp (Tieleman and Hinton, 2012), which works well in online and non-stationary settings. We can also pick up a proper learning rate manually (Smith L, 2017). We used 60 epochs to train the network, and each epoch processed 1,000 training images. As shown in Figure 4, after 60 training epochs of approximately 22 h, the accuracy of training and validation gradually increases to 95%, while the training and validation loss converges to 0.01. It shows that our network has been trained.
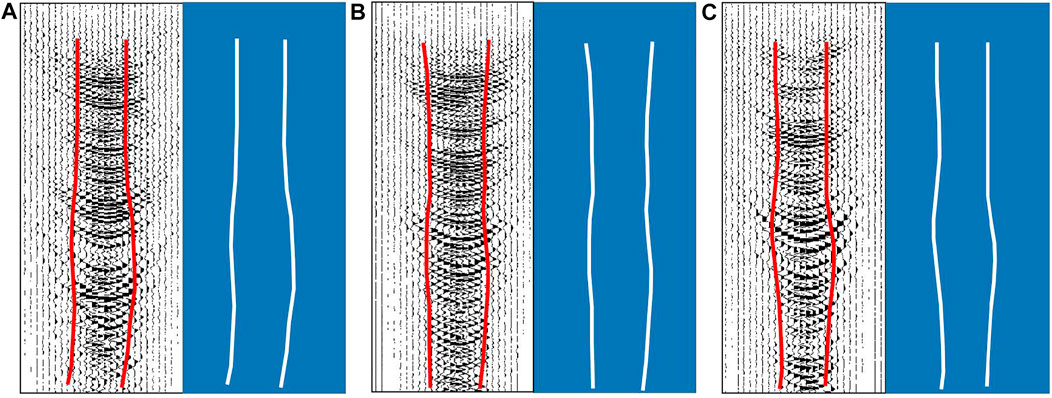
FIGURE 3. Three randomly seismic images (red lines, the boundaries manually picked) with their corresponding labels (with labeling ones, white line of Fresnel zones and zeros elsewhere) generated by manual interpretation.
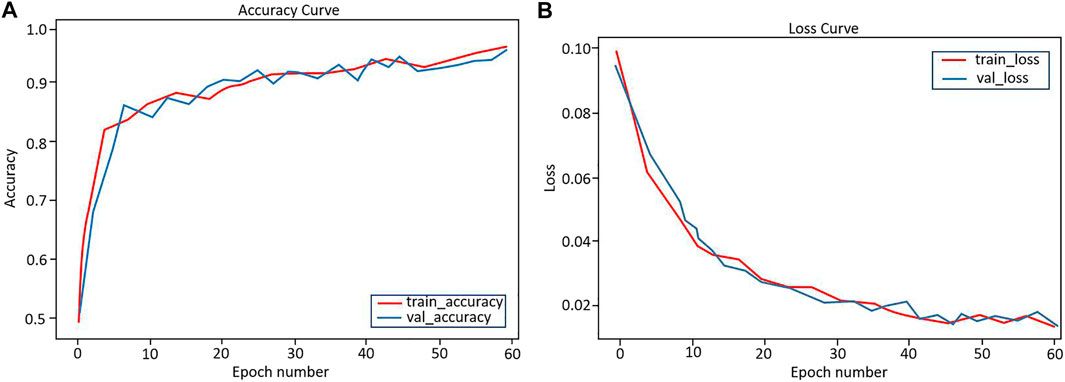
FIGURE 4. (A) The training and validation accuracy both will increase with epochs, whereas (B) the training and validation loss decreases with epochs.
4 Estimation of Effective
Zhang et al. (2013) introduced the definition of effective
1) use VSP data to obtain initial
2) generate a synthetic trace without attenuation and different migrated traces with compensation.
3) use Lee’s empirical formula
4) Use all
In step 1, we use the centroid frequency shift method (Quan and Harris, 1997) to estimate
where σ2 is the variance of the source wavelet; τ is the travel time in the layers; and fshot and fgeo are the centroid frequencies of the shot point and detection point, respectively. Since this method is sensitive to layering effects and background noise, it is necessary to preprocess the VSP data such as denoising. In addition, try to avoid thin layers, and select some large layers for
In step 2, we use a Rick wavelet to generate a synthetic trace without attenuation at the location of this VSP well, first. Because the attenuation of shallow seismic data is weak, its dominant frequency can be used as the dominant frequency of the Rick wavelet. Next, we get different migrated imaging traces corresponding to the synthetic trace using PSTM with compensation under a set of regular variable
In step 3, the unit of the parameter
In the last step, we use all
5 Result
5.1 Field Data Example
In this section, we directly use a 2D field data line to analyze and discuss the effective
Figure 5 shows how an optimal
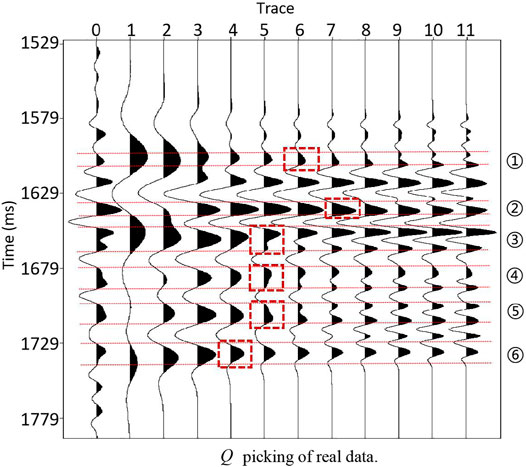
FIGURE 5.
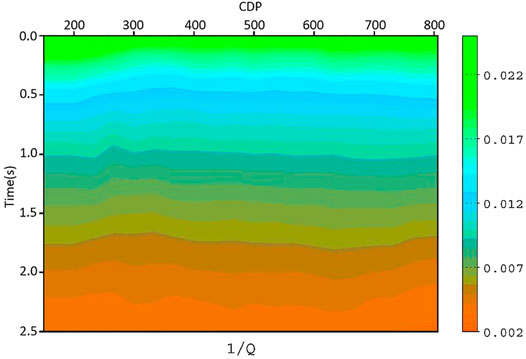
FIGURE 6.
Figure 7 shows part of the prediction results, which are the Fresnel zones predicted from the dip-angle gathers at three CDPs (400, 600, and 800). In order to solve the problem of local unsmoothness of Fresnel zones predicted by deep learning, the prediction results were sparsely processed and only twelve pairs of equally spaced sample points were retained. The Fresnel zones predicted by deep learning was obtained by connecting the sample points with smooth curves. In Figure 7, the red lines are the boundaries manually picked, while the green points on yellow lines are the sample points predicted by U-Net. The predicted boundaries of the Fresnel zones are similar to the manually picked ones, with a smoother curve. After superimposing the Fresnel zones at each CDP within the predicted boundaries, a migrated result with a higher S/N can be obtained. Figure 8 shows the compensated imaging results with different apertures. While Figure 9 shows the detailed comparison of two white boxes in Figure 8. The result with U-Net predicted an optimal aperture has a higher S/N than the result with a constant aperture. The prediction of each dip-angle gather by the trained U-Net requires approximately 0.6 s when using six TITAN Xp GPUs, which is much more efficient than manual picking. Figure 10 shows the comparison between the migration results obtained using conventional PSTM and the PSTM with compensation. The conventional PSTM used a constant aperture, and the compensated PSTM used an optimal aperture predicted by deep learning. Figure 11 shows the detailed comparison of two white boxes in Figure 10. We see the overlay events are well separated by the PSTM with compensation. Figure 12 shows the comparison of dB spectra between the migration sections obtained using conventional PSTM and the PSTM with compensation. The white boxes in Figure 10 are the time windows of the frequency spectrum. Observe that the high frequencies have been recovered well by the PSTM with compensation.
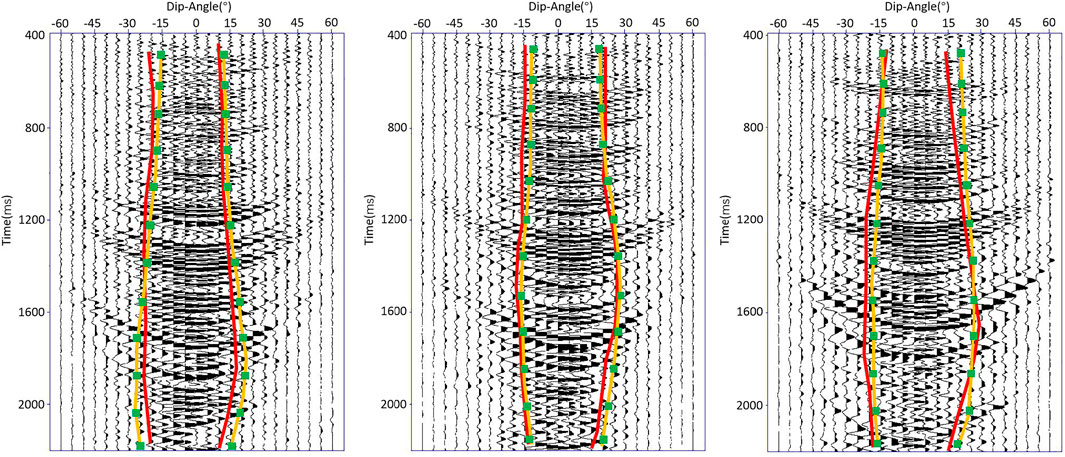
FIGURE 7. Prediction of the boundaries of the Fresnel zones from the dip-angle gathers at three CDPs (400, 600, and 800). The red lines are the boundaries manually picked, while the green points on yellow lines are the exact points predicted by U-Net. The predicted boundaries of the Fresnel zones are similar to the manually picked ones.
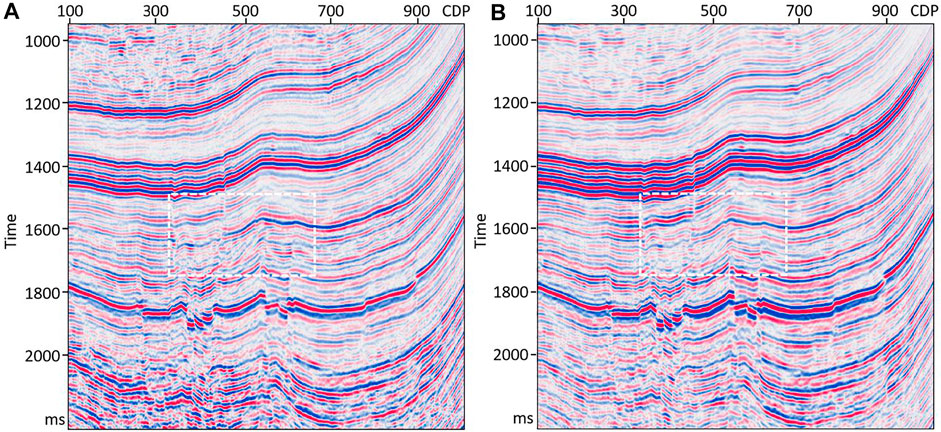
FIGURE 8. Comparison between the compensated migrated result with different apertures. Panel (A) represents the compensated migrated result with a constant aperture ranging from −17 to 17°, while panel (B) represents the result with the U-Net predicted optimal aperture. The result with the U-Net predicted optimal aperture has a higher S/N than the result with a constant aperture.
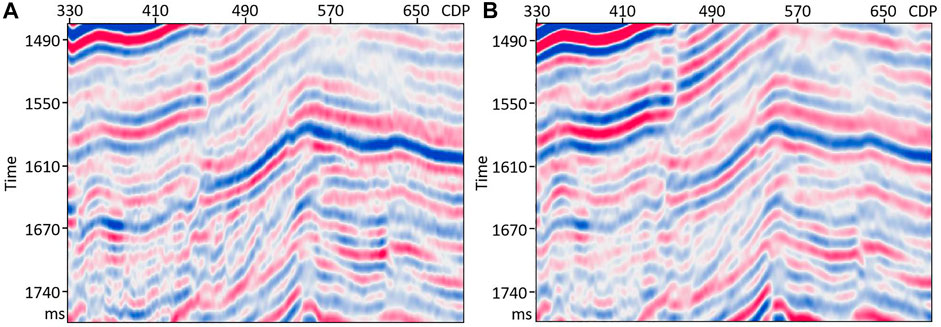
FIGURE 9. Comparison of the enlarged details inside the boxes of Figure 8. Panel (A) is the enlarged detail of the compensated migrated result with a constant aperture ranging from −17 to 17°, while panel (B) is that with the U-Net predicted optimal aperture.
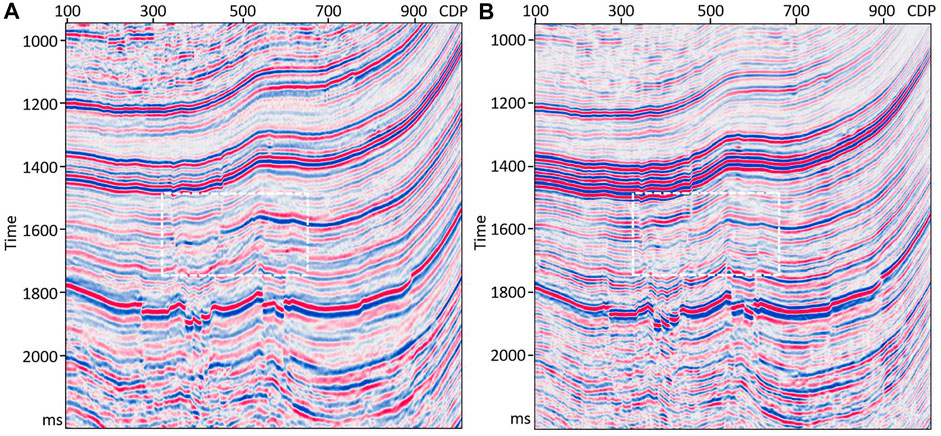
FIGURE 10. Comparison between the result obtained using conventional PSTM (A) and the result obtained using PSTM with compensating absorption and dispersion (B). Panel (A) represents the migrated result with a constant aperture ranging from −17 to 17°, while panel (B) represents the result with the U-Net predicted optimal aperture.
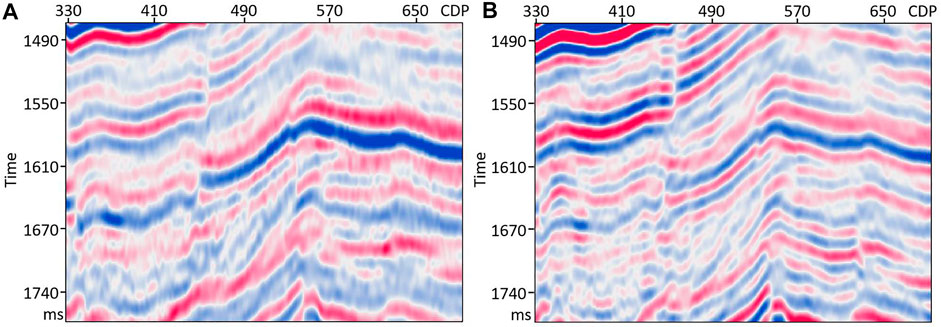
FIGURE 11. Comparison of the enlarged details in-side the boxes of Figure 10. Panel (A) is the enlarged detail of the conventional migrated result with a constant aperture ranging from −17 to 17°, while panel (B) is that of the compensated migrated result with the U-Net predicted optimal aperture.
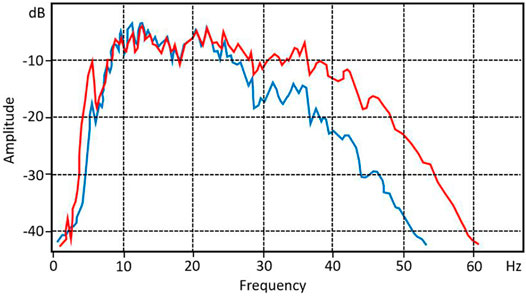
FIGURE 12. Comparison of amplitude spectra between the migration sections obtained using conventional PSTM (blue) and the PSTM with compensation (red).
6 Conclusion
We have presented a PSTM scheme that can compensate absorption and dispersion with effective
Data Availability Statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author Contributions
JW and YS contributed to conceptualization; JW and PL carried out the methodology; JW and AG helped with software; QY and JW performed validation; YS conducted the formal analysis; PL was responsible for investigation; AG and QY carried out data curation; JW wrote the original draft; JW was responsible for review and editing of the draft; QY carried out visualization; JW and PL was responsible for supervision. All authors have read and agreed to the published version of the manuscript.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Acknowledgments
The authors are grateful to the National Natural Science Foundation of China (41930431) and the China Postdoctoral Science Foundation (2020M680840) for supporting this work.
References
Bai, J., and Yingst, D.,“Q Estimation through Waveform Inversion,” in Proc. London, 75th EAGE Conf. Exhib. Incorporating SPE Europec, London, UK: Extended Abstr., 2013, 348-00601.doi:10.3997/2214-4609.20130112
Brzostowski, M., and McMechan, G. (1992). 3-D Tomographic Imaging of Nearsurface Seismic Velocity and Attenuation. ”Geophysics 57 (3), 396–403. doi:10.1190/1.1443254
Cavalca, M., Moore, I., Zhang, L., Ng, S. L., Fletcher, R., and Bayly, M. (2011). Ray-based Tomography for Q Estimation and Q Compensation in Complex media: 81st Annual International Meeting. Expanded Abstracts: SEG, 3989–3992.
Chen, J. (2004). Specular ray Parameter Extraction and Stationary-phase Migration. Geophysics 69, 249–256. doi:10.1190/1.1649392
Chen, Z., Chen, X., Wang, Y., and Jingye, L. (2014). Estimation of Q Factors from Reflection Seismic Data for a Band-Limited and Stabilized Inverse Q Filter Driven by an Average-Q Model. J. Appl. Geophys. 101, 86–94. doi:10.1016/j.jappgeo.2013.12.003
Cheng, Q., Zhang, J., and Liu, W. (2020). Extracting Fresnel Zones from Migrated Dip-Angle Gathers Using a Convolutional Neural Network. Exploration Geophys. 52. 1-10. doi:10.1080/08123985.2020.1798755
Dai, Y. U., Zhi-Jun, H. E., Yuan, S. U. N., and Wang, Y. A. (2018). A Comparison of the Inverse Q Filtering Methods Based on Wavefield continuation. J. Geophys. Geochem. Explor. 42 (2). 331–338.
Dasgupta, R., and Clark, R. (1998). Estimation of Q from Surface Seismic Reflflection Data. Geophysics 63 (6), 2120–2128. doi:10.1190/1.1444505
Dutta, G., and Schuster, G. (2016). Wave-equation Q Tomography. Geophysics 81 (6), R471–R484. doi:10.1190/geo2016-0081.1
Ferber, R. (2005). A Filter Bank Solution to Absorption Simulation and Compensation: 75th Annual International Meeting. Expanded Abstracts: SEG, 2170–2172.
Futterman, W. I. (1962). Dispersive Body Waves. J. Geophys. Res. 67 (13), 5279–5291. doi:10.1029/jz067i013p05279,
Guo, P., McMechan, G. A., and Guan, H. (2016). Comparison of Two Viscoacoustic Propagators for Q-Compensated Reverse Time Migration. Geophys. J. Soc. Exploration Geophysicists 81 (5), S281–S297. doi:10.1190/geo2015-0557.1
Hargreaves, N. D., and Calvert, A. J. (1991). Inverse Q Filtering by Fourier Transform. Geophysics 56, 519–527. doi:10.1190/1.1443067
Hecht-Nielsen, R. (1989). Theory of the Backpropagation Neural Network. Neural Networks 11, 593–605. doi:10.1109/IJCNN.1989.118638
Kamei, R., and Pratt, R. G., “Waveform Tomography Strategies for Imaging Attenuation Structure with Cross-Hole Data,” in Proc. 70th EAGE Conf. Exhib. Incorporating SPE EUROPEC, 2008.doi:10.3997/2214-4609.20147680
Keers, H., Vasco, D. W., and Johnson, L. R. (2001). Viscoacoustic Crosswell Imaging Using Asymptotic Waveforms. Geophysics 66, 861–870. doi:10.1190/1.1444975
Kjartansson, E. (1979). Constant Q Wave Propagation and Attenuation. J. Geophys. Res. 84 (1), 4737–4748. doi:10.1029/jb084ib09p04737
Klokov, A., and Fomel, S. (2012a). Optimal Migration Aperturefor Conflicting Dips. 82nd Annual International Meeting. Expanded Abstracts: SEG.
Klokov, A., and Fomel, S. (2012b). Separation and Imaging of Seismic Diffractions Using Migrated Dip-Angle Gathers. Geophysics 77 (6), S131–S143. doi:10.1190/geo2012-0017.1
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep learning. Nature 521, 436–444. doi:10.1038/nature14539
Li, Z., Zhang, J., and Liu, W. (2018). Diffraction Imaging Using Dipangle and Offset Gathers. Chin. J. Geophys. 61 (4), 1447–1459. doi:10.6038/cjg2018K0583
Marfurt, K. J. (2006). Robust Estimates of 3D Reflector Dip and Azimuth. Geophysics 71 (4), P29–P40. doi:10.1190/1.2213049
Neep, J., Worthington, M., and O’Hara-Dhand, K. (1996). Measurement of Seismic Attenuation from High-Resolution Crosshole Data. Geophysics 61 (4), 1175–1188. doi:10.1190/1.1444037
Quan, Y., and Harris, J. M. (1997). Seismic Attenuation Tomography Using the Frequency Shift Method. Geophysics 62 (1), 895–905. doi:10.1190/1.1444197
Ronneberger, O., Fischer, P., and Brox, T. (2015).U-net: Convolutional Networks for Biomedical Image Segmentation in MICCAI 2015. Editors N. Navab, J. Hornegger, W. M. Wells, and A. F. Frangi (Cham: LNCSSpringer), 9351, 234–241. doi:10.1007/978-3-319-24574-4_28
Rumelhart, D. E., Hinton, G. E., and Williams, R. J. (1986c). Learning Representations by Back-Propagating Errors. Nature 323, 533–536. doi:10.1038/323533a0
Sangwan, P., and Kumar, D. (2021). A Robust Approach to Estimate Q from Surface Seismic Data and Inverse Q Filtering for Resolution Enhancement. Houten, Netherlands: First Break.
Schleicher, J., Hubral, P., Tygel, M., and Jaya, M. S. (1997). Minimum Apertures and Fresnel Zones in Migration and Demigration. Geophysics 62, 183–194. doi:10.1190/1.1444118
Sevastopolsky, A. (2017). Optic Disc and Cup Segmentation Methods for Glaucoma Detection with Modification of U-Net Convolutional Neural Network. Pattern Recognition Image Anal. 27 (3), 618–624. doi:10.1134/s1054661817030269
Shen, Y., Biondi, B., and Clapp, R.,“Q-model Building Using One-Way Wave-Equation Migration Q Analysis—Part 1: Theory and Synthetic Test,”Geophysics, 83, 2, 1–64. 2018. doi:10.1190/geo2016-0658.1
Shen, Y., and Zhu, T. (2015). Image-based Q Tomography Using Reverse Time Q Migration. Proc. 85th Annu. Int. Meeting. Houston, TX: SEG, Expanded Abstr., 3694–3698. doi:10.1190/segam2015-5852526.1
Shi, Y., Zhou, H.-L., Cong, N., Chun-Cheng, L., and Meng, L.-J. (2019). A Variable Gain-Limited Inverse. Q. Filtering Method Enhance Resolution Seismic data.Journal Seismic Exploration 28 (3), 257–276. 10.1190/obnobc2017-22.
Smith, L. (2017). Cyclical Learning Rates for Training Neural Networks[C]. 2017 IEEE Winter Conference on Applications of Computer Vision (WACV). (IEEE).
Tian, S. (1990). Estimating the Q Value in Inverse Q Filtering with Lee’s Empirical Formula. Pet. Geophys. Prospecting(in Chinese) 3, 354–361. doi:10.1111/1365-2478.12391
Tieleman, T., and Hinton, G. (2012). Lecture 6.5-rmsprop: Divide the Gradient by a Running Average of its Recent Magnitude. COURSERA: Neural Networks for Machine Learning 4 (2).
Tonn, R. (1991). The Determination of the Seismic Quality Factor Q from VSP Data: A Comparison of Different Computational Methods. Geophys. Prospecting 39 (1), 1–27. doi:10.1111/j.1365-2478.1991.tb00298.x
Wang, Y. (2002). A Stable and Efficient Approach of Inverse Q Filtering. Geophysics 67, 657–663. doi:10.1190/1.1468627
Wang, Y., Zhou, H., Chen, H., and Chen, Y. (2018). Adaptive Stabilization for Q-Compensated Reverse Time Migration. Geophysics. 83. 1-111. doi:10.1190/geo2017-0244.1
Wu, J., Liu, B., Zhang, H., He, S., and Yang, Q. (2021). Fault Detection Based on Fully Convolutional Networks (FCN). J. Mar. Sci. Eng. 9 (3), 259. doi:10.3390/jmse9030259
Wu, J., and Zuo, H. (2019). Attenuation Compensation in Prestack Time Migration and its GPU Implementation. Oil Geophys. Prospecting 54 (1), 84–92. doi:10.13810/j.cnki.issn.1000-7210.2019.01.010
Wu, X., Liang, L., Shi, Y., and Fomel, S. (2019). FaultSeg3D: Using Synthetic Data Sets to Train an End-To-End Convolutional Neural Network for 3D Seismic Fault Segmentation. Geophysics 84, 35–45. doi:10.1190/geo2018-0646.1
Xie, S. N., and Tu, Z. W. (2015). Holistically-Nested Edge Detection. Int. Conf. Comp. Vis. 1. 1395–1403. doi:10.1109/ICCV.2015.164
Xie, Y., Xin, K., Sun, J., Notfors, C., Biswal, A. K., and Balasubramaniam, M. K. (2009). 3D prestack depth migration with compensation for frequency dependent absorption and dispersion: 79th Annual International Meeting. Expanded Abstracts. Houston, TX: SEG, 2919–2922. doi:10.1081/22020586.2010.12041885
Xu, J., and Zhang, J. (2017). Prestack Time Migration of Nonplanar Data: Improving Topography Prestack Time Migration with Dip-Angle Domain Stationary-phase Filtering and Effective Velocity Inversion. Geophysics. 82 (3), S235–S246. doi:10.1190/geo2016-0087.1
Yu, Z., Etgen, J., Whitcombe, D., Hodgson, L., and Liu, H. (2013).Dip-adaptive Operator Anti-aliasing for Kirchhoff Migration. 83rd Annual International Meeting. Expanded Abstracts. Houston, TX: SEG, 3692–3695. doi:10.1190/segam2013-0584.1
Zhang, G., Wang, X., He, Z., Yu, G., Li, Y., Liu, W., et al. (2014). Impact of Q Value and Gain-Limit to the Resolution of Inverse Q Filtering. J. Geophys. Eng. 11(4), 45011. doi:10.1088/1742-2132/11/4/045011
Zhang, H., Han, J., Li, Z., and Zhang, H. (2021). Extracting Q Anomalies from Marine Reflection Seismic Data Using Deep Learning. IEEE Geosci. Remote Sensing Lett. 1(99), 1–5. doi:10.1109/lgrs.2020.3048171
Zhang, J. F., Wu, J. Z., and Li, X. Y. (2013). Compensation for Absorption and Dispersion in Prestack migration:An Effective Q Approach. Geophysics 78 (1), 1–14. doi:10.1190/geo2012-0128.1
Zhang, J., and Wapenaar, K. (2002). Wavefield Extrapolation and Prestack Depth Migration in Anelastic Inhomogeneous media. Geophys. Prospecting 50 (1), 629–643. doi:10.1046/j.1365-2478.2002.00342.x
Keywords: Q, deep learning, high-resolution, attenuation, PSTM
Citation: Wu J, Shi Y, Guo A, Lu P and Yang Q (2022) High-Resolution Imaging: An Approach by Compensating Absorption and Dispersion in Prestack Time Migration With Effective Q Estimation and Fresnel Zone Identification Based on Deep Learning. Front. Earth Sci. 9:771570. doi: 10.3389/feart.2021.771570
Received: 06 September 2021; Accepted: 17 December 2021;
Published: 18 January 2022.
Edited by:
Jianping Huang, China University of Petroleum, Huadong, ChinaReviewed by:
Anastasia Nekrasova, Institute of Earthquake Prediction Theory and Mathematical Geophysics (RAS), RussiaJiangjie Zhang, Institute of Geology and Geophysics (CAS), China
Copyright © 2022 Wu, Shi, Guo, Lu and Yang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Jizhong Wu, d2p6a2dyQDE2My5jb20=