 Ziyang Zhang
Ziyang Zhang Lingye Tan
Lingye Tan Robert L. K. Tiong
Robert L. K. Tiong- School of Civil and Environmental Engineering, Nanyang Technological University, Singapore, Singapore
The acceleration of urbanization and the impact of climate change have led to an increasing frequency and intensity of grassland fires, posing severe challenges to resident safety and ecological protection. Traditional static evacuation route planning methods struggle to adapt in real-time to the dynamic changes in fire conditions during emergency management. To address this issue, this paper proposes a grassland fire evacuation route optimization strategy based on the GreyGNN-MARL model. By integrating Synthetic Aperture Radar (Sentinel-1 SAR) imagery, Graph Neural Networks (GNNs), Grey Wolf Optimization (GWO) algorithms, and Multi-Agent Reinforcement Learning (MARL), the model achieves intelligent planning and real-time adjustment of dynamic evacuation routes in fire scenarios. Experimental results demonstrate that this model significantly outperforms traditional methods in terms of evacuation time, risk avoidance success rate, and path safety, with evacuation time reduced by over 25% and risk avoidance success rate improved by approximately 18%. This model provides technical support for emergency management of grassland fires, helping to enhance evacuation efficiency and ensure safety, which is of great significance for smart cities and ecological protection. Future research will focus on further optimizing the model’s computational efficiency and applicability for broader use in fire emergency management in complex environments.
1 Introduction
In recent years, the frequency and intensity of wildfires have increased significantly around the world, especially in the Mediterranean, North America, South America, and Australia (Nur et al., 2022; Zhang et al., 2025). This trend not only threatens human life and property, but also has a profound impact on ecosystem recovery and carbon cycling (Ghali and Akhloufi, 2023). Climate change and intensified human activities are the main factors leading to the frequent occurrence of wildfires, causing a large loss of forest resources and weakening the self-recovery capacity of ecosystems (Zhang et al., 2021). In this context, traditional fire evacuation path planning usually focuses on the rapid evacuation of people, but it faces challenges in simultaneously considering the long-term recovery needs of ecosystems. Post-fire vegetation recovery, maintenance of carbon storage, and enhancement of ecosystem resilience have become key topics in current wildfire research and emergency management (Ban et al., 2020; Florath and Keller, 2022; Huang et al., 2025).
Ecosystem resilience is particularly important in areas where fires frequently occur. After a fire, vegetation needs to be restored to a certain coverage level to achieve carbon storage and environmental restoration goals (Tian et al., 2022). However, in areas with frequent fires and extreme weather, vegetation restoration faces many challenges, making it difficult to stabilize the carbon cycle (Lee et al., 2020). Therefore, how to balance ecosystem restoration during fire evacuation while enhancing the system’s carbon absorption and storage capacity has become a research direction that urgently needs to be solved (Sun et al., 2021). In this context, path optimization technology based on intelligent algorithms provides a new idea for solving the comprehensive needs of fire evacuation and ecosystem restoration (Jiang et al., 2021).
This study proposes a GreyGNN-MARL model, which integrates graph neural networks (GNNs), gray wolf optimization (GWO) and multi-agent reinforcement learning (MARL) technology to provide effective support for path planning and ecosystem restoration in fire-prone areas. GNNs can construct complex geographic structure information in fire scenes and generate network structures of buildings, roads and vegetation, thereby providing a data basis for path optimization (Karimzadeh et al., 2022). GWO simulates the hunting behavior of gray wolves and dynamically optimizes the weights and parameters in path planning, aiming to minimize evacuation time while maximizing safety (Hu et al., 2021). In addition, MARL trains multiple agents (such as emergency evacuees) to collaborate in a dynamic fire environment, thereby facilitating the identification of optimal evacuation paths and strategies.
The main contribution of this research are as follows:
• The fusion of multi-source data, including Sentinel-1 SAR imagery, global fire carbon emissions, and vegetation indices, utilizing Graph Neural Networks (GNNs) to construct complex geographical structural information in fire scenarios, achieving a unified modeling of path optimization and ecosystem recovery.
• The introduction of the Grey Wolf Optimization (GWO) algorithm to dynamically adjust evacuation path weights and parameters, minimizing evacuation time while maximizing safety, providing intelligent support for path decision-making in high-frequency fire environments.
• The implementation of Multi-Agent Reinforcement Learning (MARL) to enable agents to collaborate in dynamic fire environments, ensuring that evacuation path optimization not only prioritizes crowd safety but also supports post-fire ecosystem recovery and carbon storage.
This model is not only applicable to grass fires, but can also be extended to other types of fire scenarios, such as bush fuel fires. Through the fusion of multi-source data, the model can adapt to the characteristics of fires of different fuel types and achieve more flexible and efficient evacuation path optimization. By optimizing the selection of evacuation paths, the GreyGNN-MARL model not only reduces the time for crowd evacuation, but also helps reduce damage to vegetation and the environment, thereby providing more favorable conditions for subsequent ecological restoration. By combining multi-source data, the model can identify high-risk areas for fires and provide scientific path planning support for vegetation restoration and carbon storage, striving to reduce the negative effects of fire on the environment through path optimization and promote the sustainable recovery of the ecosystem.
2 Related work
2.1 Fire evacuation path optimization algorithms
Fire evacuation path optimization algorithms play a critical role in emergency management during fires, with the primary goal of providing the safest and most effective evacuation routes for people during a fire event, thereby minimizing loss of life and property. Traditional path optimization methods typically rely on Geographic Information Systems (GIS) and classic graph-based algorithms, such as Dijkstra’s and A* algorithms, which can efficiently find the shortest paths in static environments (Chen et al., 2020; Wang et al., 2025a). However, these methods struggle to adapt to the real-time requirements of path safety and responsiveness in the rapidly changing conditions of a fire disaster, leading to limited practical application effectiveness (Kodipalli et al., 2023).
In recent years, with the advancement of deep learning and intelligent optimization algorithms, fire evacuation path optimization has gradually incorporated data-driven and intelligent optimization approaches to address the complexities of dynamic fire scenarios (Sharma et al., 2020; Wang et al., 2025b). Graph Neural Networks (GNNs) have emerged as a valuable tool in disaster management due to their advantages in processing graph-structured data. They can model complex geographical environments as graph structures and analyze the risks and fire spread in different areas, thus providing support for dynamic path planning (Salami et al., 2023). Meanwhile, intelligent optimization algorithms, such as Particle Swarm Optimization (PSO) and Ant Colony Optimization (ACO), exhibit strong global search capabilities in path optimization, enabling the identification of safe routes in risk environments created by fire spread (Bouguettaya et al., 2022). Nevertheless, relying solely on deep learning or optimization algorithms still presents limitations in practical fire evacuation path optimization, primarily due to a lack of dynamic updating mechanisms that can effectively respond to the rapid expansion of fire.
Furthermore, to enhance the intelligence and real-time capabilities of path planning, this paper primarily explores the application of Multi-Agent Reinforcement Learning (MARL) in evacuation path optimization. By simulating various evacuation strategies through the collaboration of multiple agents in dynamic environments, the model can dynamically adjust path planning to adapt to the rapid changes in fire conditions.
2.2 Application of SAR images in disaster management
In disaster management, Synthetic Aperture Radar (SAR) imagery has become an essential tool for monitoring natural disasters due to its all-weather, all-hour observation capabilities. SAR imagery can penetrate clouds and smoke, providing high-resolution surface information suitable for real-time monitoring of various disaster scenarios, including floods, earthquakes, and wildfires. Particularly in wildfire management, SAR imagery can clearly capture the areas affected by fires, the direction and rate of spread, offering robust data support for comprehensive monitoring and assessment of fire situations (Gupta et al., 2021; Tlijani et al., 2023). Traditional disaster management methods rely on ground sensors and video surveillance, which are limited in their application to large-scale fire scenarios and struggle to cover distant or dense fire areas. In contrast, SAR imagery not only provides real-time observations over a broader range but also acquires high-precision surface information, such as the location of fire sources, fire boundaries, vegetation density, and other critical features (Karimzadeh et al., 2022; Subramanian et al., 2023). By processing this SAR data, researchers can rapidly analyze fire dynamics after an outbreak, providing an accurate information foundation for disaster emergency decision-making (As shown in Figure 1).
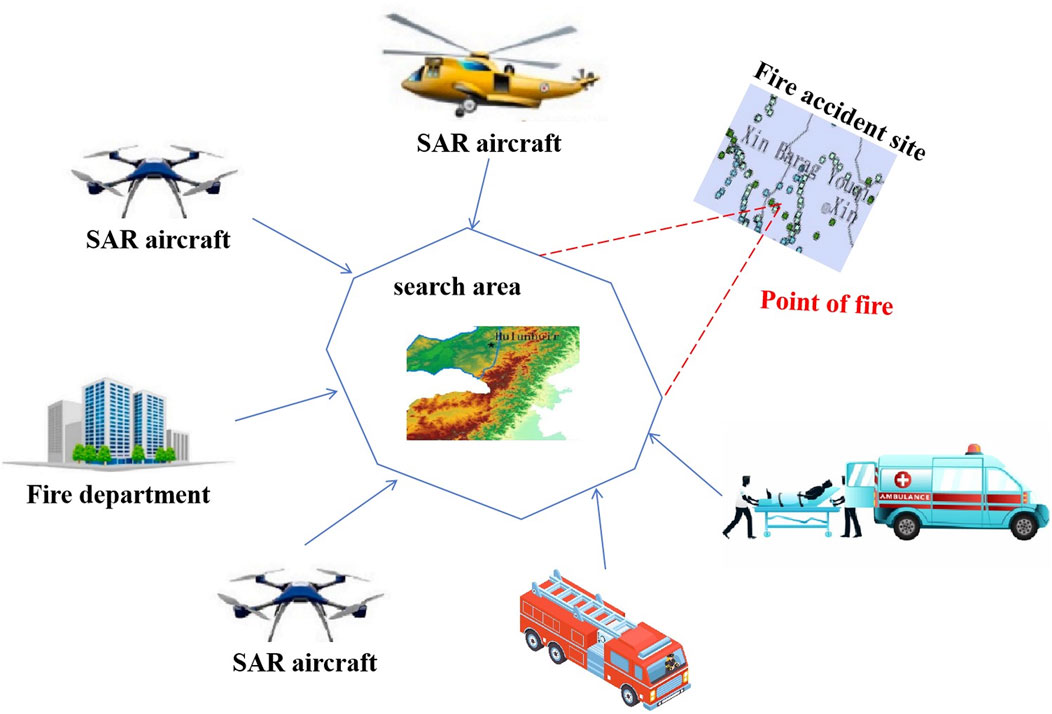
Figure 1. Schematic diagram of the application of SAR imagery in fire emergency management (based on multi-platform applications in related research). Different SAR platforms used in traditional fire monitoring research, including satellite and aerial platforms. Please note that the SAR data used in this study came from the Sentinel-1 satellite platform, not the aerial platform.
In recent years, with the advancement of deep learning and intelligent analysis technologies, the accuracy and efficiency of SAR image processing have been greatly enhanced. Leveraging deep learning models such as Graph Neural Networks (GNN) and Convolutional Neural Networks (CNN), SAR imagery can be transformed into visual charts of fire situations, thereby supporting dynamic modeling of disaster scenarios (Pi et al., 2020; Wang and Wang, 2024; Yu and Zhenhua, 2024). However, many current studies still focus on the application of SAR imagery in disaster detection and monitoring, with less exploration of its potential in disaster evacuation path optimization. Although SAR imagery can provide precise information on fire spread, integrating it effectively into real-time decision-making for path planning remains an underexplored technical challenge (Alsamhi et al., 2021). Therefore, fully leveraging the data support role of SAR imagery in disaster management and combining it with evacuation path optimization models is an important direction for enhancing the speed and quality of wildfire emergency response and decision-making.
2.3 Application of hybrid optimization algorithms in path planning
In the field of path planning, hybrid optimization algorithms have gradually become an effective tool for path planning in complex environments due to their combination of global search and local optimization capabilities. These algorithms typically integrate various optimization methods, such as Particle Swarm Optimization (PSO), Ant Colony Optimization (ACO), and Genetic Algorithms (GA), and leverage machine learning models to enhance the adaptability and efficiency of the algorithms (Hu X. et al., 2023). By combining the strengths of different algorithms, hybrid optimization algorithms excel in multi-objective optimization, making them particularly suitable for dynamic path planning in complex disaster scenarios. In wildfire scenarios, path planning must consider not only conventional factors such as path length and time but also the potential threats of fire spread to the routes in real-time. Traditional path planning algorithms (like A*, Dijkstra) can find the optimal path in static environments but struggle to cope with the real-time changes in fire conditions (Xu et al., 2022). To address this issue, researchers have begun to introduce hybrid optimization algorithms to improve the flexibility of path planning. These methods dynamically adjust the weight coefficients and sampling strategies in path selection, enabling the generation of safer and more stable evacuation routes in complex fire environments.
Furthermore, with the development of Multi-Agent Reinforcement Learning (MARL) technology, hybrid optimization algorithms have been increasingly applied to multi-agent collaborative path planning. MARL’s application in fire scenarios can simulate the cooperation of multiple evacuation teams, adjusting routes in real-time to avoid collisions and adapt to the dynamic changes in fire conditions (Yang et al., 2022). However, although the combination of hybrid optimization algorithms and MARL can enhance the flexibility and dynamic adaptability of path planning, most existing studies focus on the theoretical aspects of the algorithms, lacking practical application explorations supported by multi-source data (Poudel and Moh, 2021). How to effectively integrate hybrid optimization algorithms with fire data (such as SAR imagery, fire emission data) to meet the path planning needs in wildfires remains a significant technical challenge.
3 Methods
3.1 Overall model framework
This study proposes the GreyGNN-MARL model, which aims to provide an intelligent solution for evacuation path optimization in grassland fire scenarios. The core goal of the model is to achieve real-time planning and adjustment of dynamic evacuation paths under fire environments by combining multi-source data with intelligent algorithms. The GreyGNN-MARL model consists of multiple modules, mainly including graph neural networks (GNN) modules, gray wolf optimization (GWO) modules, and multi-agent reinforcement learning (MARL) modules. Through the collaborative work of these modules, the model can optimize evacuation paths in real time in complex and dynamic fire environments. Figure 2 shows the overall architecture of the GreyGNN-MARL model, covering the complete process from multi-source data input to path planning output.

Figure 2. Overall structure of the GreyGNN-MARL model.
At the input layer of the model, GreyGNN-MARL combines multi-source data from Sentinel-1 SAR images, global fire emission data (GFED), vegetation index, etc., and structures the fire scene through data preprocessing. These data are processed by GNNs, where each path (track1, track2, track3) represents a different data processing flow. GNNs and SAR encoders are used to extract geographic and fire information from multi-source data to form a graph structure of the fire scene. In this process, nodes represent different geographical locations or evacuation areas, while edges represent the connection between nodes based on risk propagation or traffic accessibility. Through this graph structure, the model can dynamically capture the spread of fire and regional fire risk information.
After the graph structure is constructed, the model enters the GWO module, which performs preliminary optimization of the path based on the graph feature matrix of GNN. The GWO algorithm simulates the hunting strategy of gray wolf groups and uses adaptive sampling density to dynamically adjust the weights in path selection to generate multiple candidate evacuation paths. Compared with traditional path planning methods, the GWO module can prioritize avoiding high-risk areas and improve the safety and efficiency of path selection.
Then, the MARL module further optimizes the evacuation path through multi-agent collaboration. In a fire environment, the MARL module uses multiple agents to adjust the evacuation strategy in real time to cope with the dynamic changes caused by the spread of fire. Each agent represents an evacuation team, which ensures that each group of evacuees can avoid high-risk areas and adjust the evacuation path in real time by sharing information and collaborating. In a complex environment where the fire is dynamically expanding, the MARL module can continuously optimize the path to ensure that the evacuation process is more adaptable and intelligent.
Through the organic combination of GNN, GWO and MARL modules, the model forms a multi-level intelligent evacuation path optimization system that can dynamically optimize the path in a fire environment and improve the safety, real-time and adaptability of the evacuation path.
3.2 Graph neural networks module
The Graph Neural Network (GNN) module is the core component of the GreyGNN-MARL model used for constructing and analyzing the fire environment. Its main task is to convert fire scenes into graph structure representations based on multi-source data (such as SAR images, fire emission data, and vegetation indexes) to capture fire spread and regional risks at the node and edge levels. Through the GNN module, the model can effectively extract and process spatial and risk information in the fire environment, providing accurate fire risk and regional information support for the path optimization module (Chae et al., 2022; Sannidhan et al., 2023; Wang et al., 2022). As shown in Figure 3, the architecture of the GNN module includes data preprocessing, feature initialization of nodes and edges, message passing, and aggregation steps.
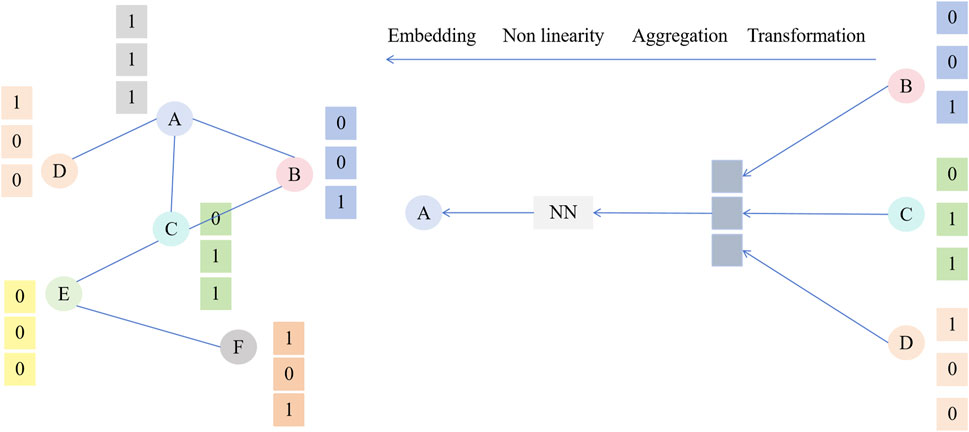
Figure 3. GNN module architecture and workflow. Nodes “A” and “B” represent different geographical locations and evacuation areas. Node features include geographical location, fire risk, vegetation cover, etc. Edges represent the connection between nodes, and weights reflect fire risk or traffic capacity.
Initially, the GNN module converts key geographical information and fire status in the fire scenario into a graph structure
where
During the message passing phase, the GNN module propagates and aggregates fire and risk information through edges between each node, constructing dynamic features of the fire scenario. In the
where
To further enhance the accuracy of risk propagation in fire scenarios, the GNN module introduces an attention mechanism in message passing to dynamically adjust the weights
where
After multiple layers of message passing and feature aggregation, the GNN module outputs the final node features
The GNN module forms a high-dimensional feature representation of the fire scenario through multi-layer feature aggregation, dynamic adjustment of attention weights (Ge et al., 2022), and embedding of fire risks. This module not only effectively captures the spatial relationships in the fire environment but also dynamically models the fire spread process, laying a solid data foundation for real-time path planning in the GreyGNN-MARL model.
3.3 Grey wolf optimizer module
The Grey Wolf Optimizer (GWO) module in the GreyGNN-MARL model is responsible for generating preliminary path optimization in fire scenarios. Inspired by the hunting behavior of grey wolves, the GWO algorithm dynamically adjusts path sampling density and weight coefficients to provide global search and optimization capabilities for evacuation routes (Sun et al., 2024; Wei et al., 2024; Agarwal et al., 2023). In fire environments, the GWO module utilizes the graph feature matrix generated by the Graph Neural Network (GNN) to preliminarily plan multiple candidate paths, ensuring that evacuation routes can avoid high-risk areas as much as possible. As shown in Figure 4, the GWO module includes key steps such as path initialization, dynamic sampling, and iterative optimization.
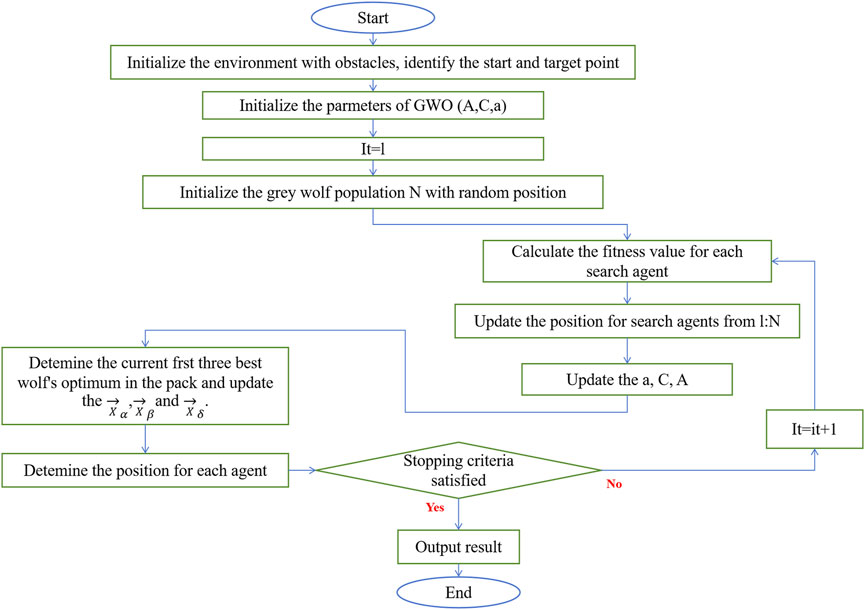
Figure 4. Gwo model structure diagram.
The GWO module initializes three main search agents: the alpha wolf (Alpha), beta wolf (Beta), and delta wolf (Delta), each playing different roles in path optimization. The positions of these three agents represent the coordinates of candidate evacuation routes, with the initialization formula as follows:
where
During the path optimization process, the GWO module improves the evacuation route’s risk avoidance effect by dynamically adjusting the sampling density. Specifically, the alpha, beta, and delta wolves repeatedly calculate the distances between each other to update their respective path positions. The path update formula for the
where
where
Additionally, to ensure the stability of the optimization process and the global nature of path selection, the GWO module comprehensively evaluates the path distances between the alpha, beta, and delta wolves in each iteration. The comprehensive path evaluation formula is as follows:
where
After multiple iterations and dynamic sampling, the GWO module generates a set of optimized candidate paths, with the selected paths having high safety and shorter evacuation times. These paths will serve as the initial path input for the Multi-Agent Reinforcement Learning (MARL) module, further supporting dynamic adjustment and real-time optimization of the paths. The GWO module provides an efficient preliminary path optimization method for the GreyGNN-MARL model through adaptive path sampling and multi-objective optimization strategies.
3.4 Multi-agent reinforcement learning module
Multi-Agent Reinforcement Learning (MARL) extends traditional reinforcement learning to environments where multiple agents interact. Each agent learns to optimize its strategy by receiving feedback from the environment while considering the presence and actions of other agents. In MARL, agents operate in a shared environment, learning to cooperate or compete to achieve individual or collective goals. Each agent simulates an “evacuation team,” which refers to a group of individuals who need to evacuate urgently during a fire, usually residents walking, residents riding bicycles, or families driving small vehicles (such as cars). We assume that these evacuation teams are small in size to allow for more flexible route adjustments and avoidance of high-risk areas for fires. Larger-scale transportation vehicles (such as buses) and large-scale team evacuations are not within the scope of this study’s assumptions. The model focuses on the rapid evacuation of small-scale teams. As shown in Figure 5, the MARL module includes the state space definition of the agent, the reward function design, and the policy update process.

Figure 5. Structural diagram of the GWO algorithm.
In the MARL module, the state
where
Each agent selects an evacuation path by performing an action
where
To achieve efficient risk avoidance, the MARL module designs a comprehensive reward function that considers factors such as path safety, evacuation time, and distances between agents. The reward function is defined as:
where
During the training process of the MARL module, the model gradually optimizes path selection through the collaboration of multiple agents, enabling them to achieve dynamic path planning under changing fire conditions and uncertainties. Information sharing and state synchronization among agents also ensure global consistency in evacuation routes (Ünal et al., 2022; Hu Y. et al., 2023). To further optimize the strategy, agents update their decision policy using the following policy iteration formula:
where
In summary, the MARL module enables the GreyGNN-MARL model to achieve intelligent evacuation route optimization in dynamic fire environments through collaborative learning and real-time decision-making among multiple agents, providing reliable technical support for real-time risk avoidance in complex disaster scenarios.
4 Experiment
4.1 Datasets
To ensure the practical application effectiveness of the GreyGNN-MARL model in grassland fire scenarios, this study selected high-quality public datasets that are multi-sourced and multi-dimensional, including the Sentinel-1 SAR dataset, the Global Fire Emissions Database (GFED), and the NASA LP DAAC vegetation index dataset. These datasets provide comprehensive fire scenario information, covering the geographical structure of the fire area, the spread trend of the fire, and the vegetation coverage, providing ample data support for path optimization in dynamic fire environments. Table 1 shows an overview of the datasets and their application scenarios.

Table 1. Summary of experimental datasets.
The Sentinel-1 SAR dataset provides all-weather, all-hour synthetic aperture radar imagery. SAR imagery can penetrate clouds and smoke, accurately acquiring the location of the fire source, fire boundaries, and surface features during the fire (Lasaponara et al., 2023). This information is used to generate the base graph structure of the fire area, helping the GNN module capture geographical features and fire dynamics in the fire scenario, providing high-precision input for environmental modeling in path planning.
The Global Fire Emissions Database (GFED) provides data on carbon emissions, fire intensity, and spread trends during the fire. GFED data reflects the activity of the fire source and the type of combustion during the fire occurrence period, which helps to label high-risk areas and dynamically simulate the expansion of the fire (Oliva et al., 2020). The model uses GFED data for real-time updates of risk areas, ensuring that evacuation routes avoid high-risk areas of fire spread, enhancing the safety of the evacuation process.
The NASA LP DAAC Vegetation Index dataset provides vegetation indices (such as NDVI and EVI) for grassland areas, as well as ecological characteristics such as vegetation coverage and density (Huot et al., 2022). In fire scenarios, vegetation density and type directly affect the speed of fire spread and the level of fire risk. Through vegetation data, the GNN module can model the fire scenario accurately, further enhancing the support for risk avoidance strategies in path planning. Evacuation routes, and enhanced evacuation efficiency and safety.
4.2 Experimental setup
The experiment was conducted in a high-performance computing environment to support large-scale data processing and efficient training of multi-module deep learning models. The hardware and software configurations and model parameter settings are shown in Table 2 covering detailed configurations of hardware devices, software platforms, key hyperparameters, and model modules.
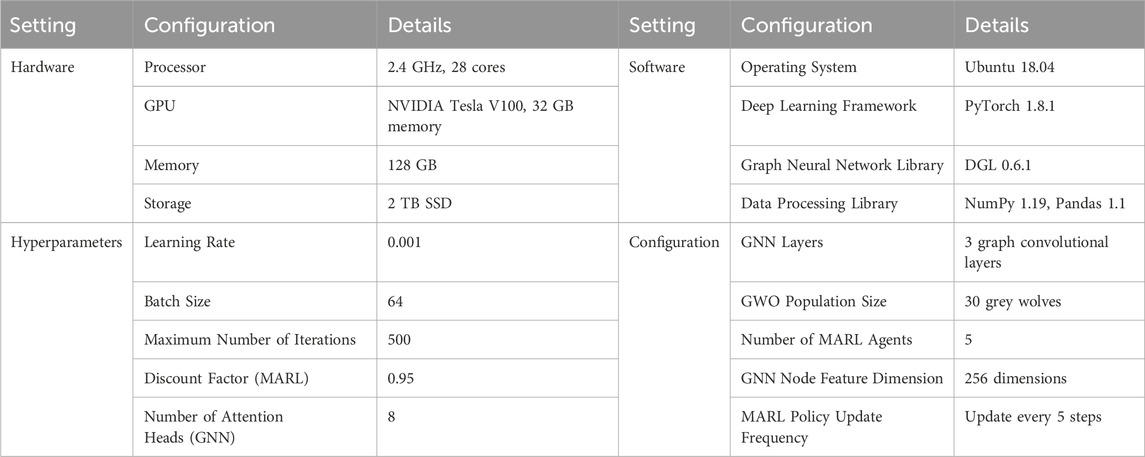
Table 2. Experimental environment and model parameter settings.
4.3 Evaluation metrics
To comprehensively evaluate the performance of the GreyGNN-MARL model in fire evacuation route optimization, this study designed multiple experimental metrics, including route planning time, risk avoidance success rate, route safety, route smoothness, and communication delay. These metrics quantitatively assess the model’s performance from aspects of efficiency, safety, and stability, ensuring its reliability and application value in actual fire scenarios.
Route planning time refers to the average time required for the model to generate evacuation routes, calculated in seconds, used to measure the model’s response efficiency.
where
Risk avoidance success rate refers to the frequency at which the model successfully avoids high-risk areas in the fire environment, expressed as a percentage, used to evaluate the safety of route planning.
where
Route safety assesses the cumulative fire risk in the evacuation route, calculated using the fire risk weight
where
Route smoothness is used to measure the continuity and smoothness of the route, calculated by the angle changes between segments in the route:
where
Communication delay refers to the delay time of the system in receiving and processing multi-source data, used to evaluate real-time responsiveness in IoT environments:
where
These experimental metrics cover the model’s response speed, the safety and smoothness of the route, and communication efficiency, ensuring the GreyGNN-MARL model has comprehensive performance in fire evacuation route optimization.
4.4 Results analysis and discussion
4.4.1 Parameter tuning results
In this experiment, Figure 6 illustrates the performance of the GreyGNN-MARL model under different parameter settings, including the impact of learning rate and discount factor on model training outcomes.
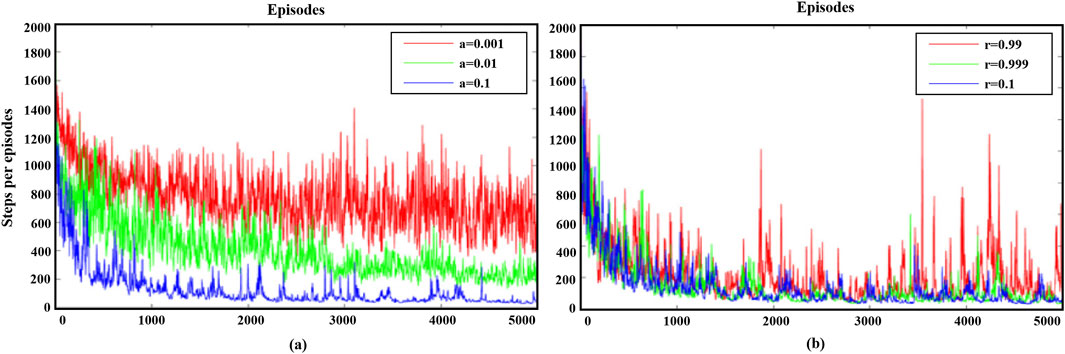
Figure 6. Effect of different learning rates and discount factors on the training results of the GreyGNN-MARL model. (a) shows the change in the number of steps (steps per episode) that the agent performs in each session as the number of training sessions increases at different learning rates (0.001,0.01, and 0.1). (b) shows the training performance of the agents under different discount factors (0.99,0.999 and 1).
As shown in Figure 6a, different learning rates significantly affect the agents’ performance during Multi-Agent Reinforcement Learning (MARL) training. With an increasing number of training epochs, all curves exhibit a clear downward trend, indicating that the agents are gradually learning more optimal evacuation strategies. Specifically, the curve for a learning rate of 0.1 (blue) shows a rapid initial decline and achieves a lower step count within fewer training epochs, suggesting that a higher learning rate can accelerate model convergence. However, as training progresses, the curve for a learning rate of 0.1 displays greater volatility, indicating that a high learning rate may lead to model instability. In contrast, the curves for learning rates of 0.01 (green) and 0.001 (red) are more stable in the later stages of training. Despite their slower convergence, they ultimately achieve better convergence results.
Figure 6b shows the impact of different discount factors on the agents’ training performance. The curve for a discount factor of 1 (blue) exhibits a rapid initial decline, reaching a lower step count within fewer training epochs, indicating that considering long-term rewards enables agents to quickly find optimal evacuation strategies. However, as training progresses, the curve for a discount factor of 1 shows significant fluctuations, suggesting that considering a too long-term reward period may lead to model instability in practical applications. In contrast, the curves for discount factors of 0.999 (green) and 0.99 (red) show a more stable downward trend throughout training, ultimately achieving lower and more stable step counts. The curve for a discount factor of 0.999 balances convergence speed and stability, demonstrating a better overall performance. This indicates that an appropriate discount factor can balance short-term and long-term rewards, enhancing the model’s overall performance.
4.4.2 Ablation experiment results
In this study, we conducted ablation experiments on three datasets—Sentinel-1 SAR Imagery, Global Fire Emissions Database (GFED), and NASA LP DAAC Vegetation Index—to evaluate the impact of different modules on the overall performance of the GreyGNN-MARL model. By comparing the performance of the full model with versions where specific modules were removed, we can clearly see each module’s contribution to overall performance.
As shown in Table 3, removing the GNN module significantly increases evacuation time and reduces the avoidance success rate, indicating the critical role of GNNs in extracting geographic structure information and optimizing the path. Similarly, removing the GWO module results in notable decreases in path safety and path smoothness, demonstrating the importance of the GWO module in optimizing path weights and parameters. When the MARL module is removed, communication delay increases, though other metrics are less affected, highlighting the MARL module’s role in enhancing model collaboration and optimizing evacuation strategies. The full model performs best across all metrics, validating the effectiveness of the cooperative work of all modules.

Table 3. Ablation study results for the Sentinel-1 SAR Imagery dataset.
As shown in Table 4, removing the GNN module leads to a significant increase in evacuation time and a lower avoidance success rate, emphasizing the importance of GNNs in extracting dynamic fire information and optimizing the path. Removing the GWO module decreases path safety and path smoothness, highlighting the critical role of GWO in path weight and parameter optimization. Removing the MARL module increases communication delay, though other metrics are minimally affected, underscoring the importance of MARL in model collaboration and evacuation strategy optimization. The full model performs best across all metrics, affirming the benefits of all modules working in unison.

Table 4. Ablation study results for the GFED dataset.
As shown in Table 5, removing the GNN module significantly increases evacuation time and reduces the avoidance success rate, highlighting the role of GNNs in constructing the fire scene network structure and optimizing the path. Removing the GWO module decreases path safety and path smoothness, illustrating the GWO module’s critical role in optimizing path weights and parameters. Removing the MARL module increases communication delay, though other metrics are minimally affected, showing MARL’s importance in enhancing model collaboration and optimizing evacuation strategies. The full model performs best across all metrics, validating the effectiveness of the cooperative work of all modules.

Table 5. Ablation study results for the NASA LP DAAC Vegetation index dataset.
Through analysis of the ablation experiment results across the three datasets, the vital roles of the GNN, GWO, and MARL modules in the GreyGNN-MARL model are evident. Each module enhances the model’s performance in different aspects, confirming the rationality and effectiveness of the model design. These results provide important references for further optimization and improvement of the model.
According to the experimental results in Table 6, the model shows similar computational complexity and running efficiency on different datasets.

Table 6. Training results of the GreyGNN-MARL model on the Sentinel-1 SAR image dataset, GFED dataset, and NASA LP DAAC vegetation index dataset.
On all datasets, the number of parameters of the model is between 15.2 M and 15.5 M, and the floating point operation volume is roughly between 4.5 G and 4.8 G, indicating that the computational requirements of the model on these three datasets are relatively consistent. The inference time is between 120 ms and 125 ms, showing that the model has good real-time response capabilities and can quickly optimize the evacuation path. The training time is slightly different on different datasets. The training time for the Sentinel-1 SAR image dataset is 300 s, the GFED dataset is 290 s, and the NASA LP DAAC vegetation index dataset is 310 s. These results show that despite the different datasets, the model can still maintain a relatively stable computational efficiency during training. Overall, the GreyGNN-MARL model performs well in computational efficiency and performance, and can efficiently perform path optimization tasks in a variety of datasets and fire scenarios, proving its wide applicability and practicality. These experimental results also verify that the model has strong real-time response capabilities in practical applications, can quickly provide optimized evacuation paths in the response phase, and can process data of different complexities in the training phase.
4.4.3 Comparative experiment results
In the comparative experiments, we evaluated the performance of the GreyGNN-MARL model in fire evacuation path optimization against results from other traditional path planning algorithms and single-agent reinforcement learning algorithms. Tables 7–9 present the experimental results on the Sentinel-1 SAR Imagery, Global Fire Emissions Database (GFED), and NASA LP DAAC Vegetation Index datasets, respectively.
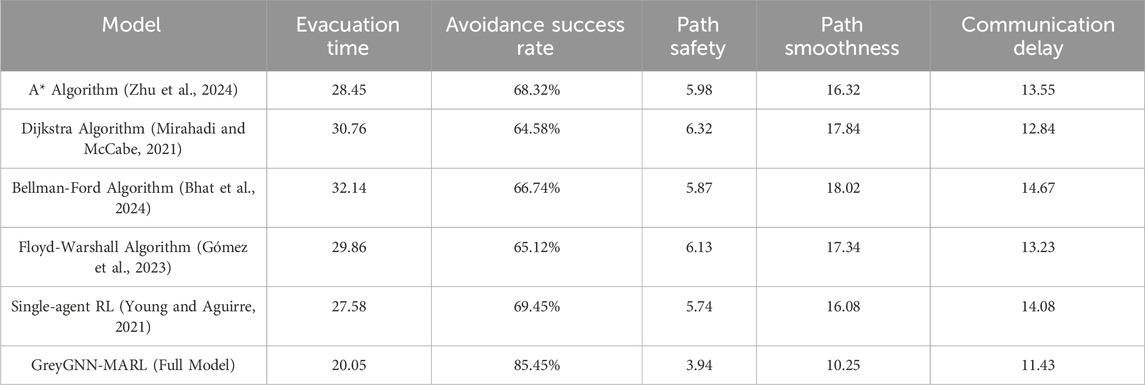
Table 7. Comparison of different models on the Sentinel-1 SAR Imagery dataset.
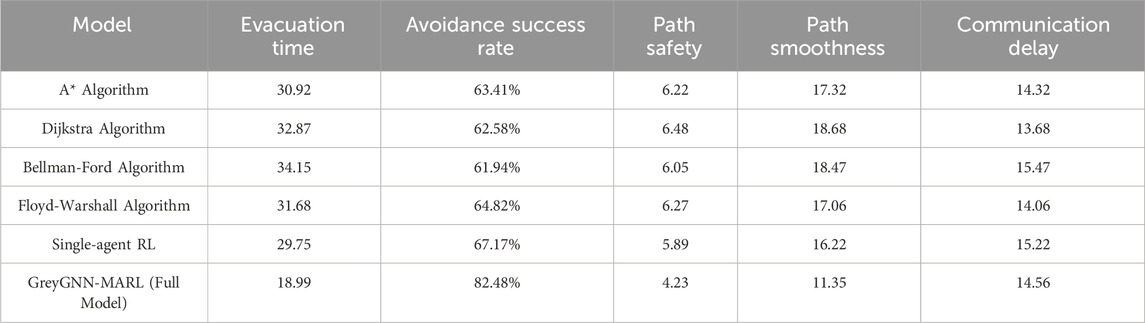
Table 8. Comparison of different models on the GFED dataset.
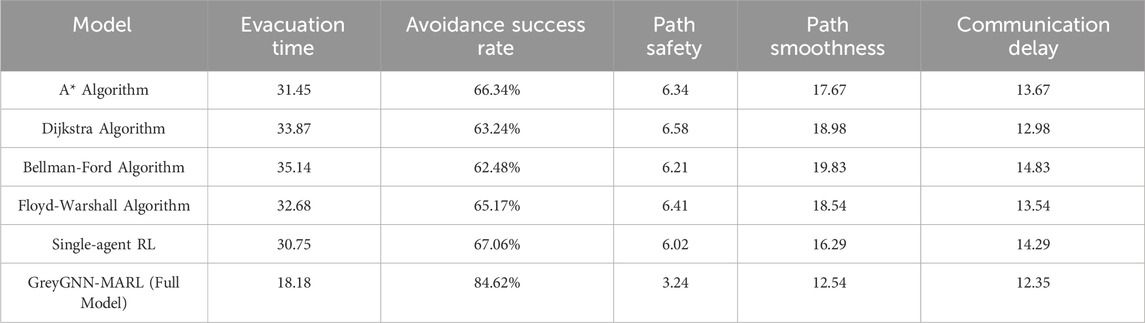
Table 9. Comparison of different models on the NASA LP DAAC Vegetation Index dataset.
As shown in Table 7, the GreyGNN-MARL model demonstrates the best performance across all metrics. In terms of evacuation time, the GreyGNN-MARL model achieves an evacuation time of 20.05, significantly lower than the best-performing traditional algorithm (Single-agent RL), which has an evacuation time of 27.58. For avoidance success rate, the GreyGNN-MARL model achieves 85.45%, much higher than other models, showing its superior ability to navigate around high-risk areas. In terms of path safety, the GreyGNN-MARL model scores 3.94, significantly better than other models, indicating its advantage in selecting safer paths. Additionally, the GreyGNN-MARL model outperforms other models in path smoothness and communication delay, further validating its superior performance in complex fire environments.
According to the results in Table 8, the GreyGNN-MARL model also outperforms other models on the GFED dataset. Specifically, the GreyGNN-MARL model achieves an evacuation time of 18.99, significantly lower than the best-performing traditional algorithm (Single-agent RL), which has an evacuation time of 29.75. For avoidance success rate, the GreyGNN-MARL model achieves 82.48%, showing its strong capability to navigate efficiently in fire scenarios. In terms of path safety, the GreyGNN-MARL model scores 4.23, significantly safer than other models. Additionally, the GreyGNN-MARL model shows superior performance in path smoothness and communication delay, demonstrating its effectiveness in fire evacuation path optimization.
As shown in Table 9, the GreyGNN-MARL model significantly outperforms other models on the NASA LP DAAC Vegetation Index dataset. In terms of evacuation time, the GreyGNN-MARL model achieves an evacuation time of 18.18, significantly lower than the best-performing traditional algorithm (Single-agent RL), which has an evacuation time of 30.75. For avoidance success rate, the GreyGNN-MARL model achieves 84.62%, indicating its significant advantage in navigating high-risk areas. The GreyGNN-MARL model also demonstrates superior performance in path safety, path smoothness, and communication delay, further validating its advantages in complex fire environments.
The GreyGNN-MARL model consistently outperforms traditional path planning algorithms and single-agent reinforcement learning algorithms across various datasets, demonstrating its significant advantages in fire evacuation path optimization. These results validate the effectiveness and reliability of the GreyGNN-MARL model in practical applications.
4.4.4 Evacuation path results
Figure 7 illustrates the fire localization and dynamic monitoring process in fire evacuation route planning. Figure 7a shows the initial satellite image of the fire area, with the yellow contour representing the boundary of the study area. Figure 7b further focuses on the area where the fire is most concentrated, marking the high-risk fire area with a black frame, showing the concentrated distribution of the fire and helping to identify the main direction of fire spread. Figure 7c displays the evacuation distribution of agents during the fire simulation process, with orange and pink markers representing different evacuation agents, showing their concentrated avoidance and evacuation distribution in high-risk fire areas. Through this visualization result, it can be seen that the model effectively identifies and locates high-risk fire areas using multi-source data, and achieves avoidance and evacuation optimization in high-risk areas through dynamic path adjustments of agents. The fire spread and evacuation point distribution in the figure indicate that the model can adjust evacuation strategies in real-time according to fire changes in the fire environment, ensuring the safety and efficiency of evacuation routes.
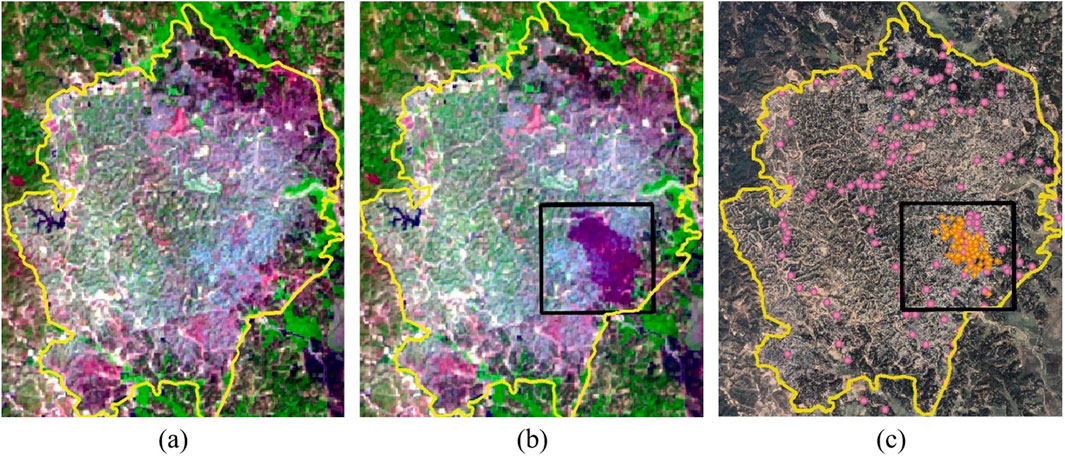
Figure 7. Fire localization and agent distribution in fire monitoring and evacuation route planning. (a) Shows the initial fire satellite image of the study area, with the yellow contour as the boundary of the study area; (b) focuses on the fire-concentrated area, marking the high-risk fire area with a black frame; (c) shows the evacuation distribution of agents during the fire simulation process, with orange and pink markers indicating different agents.
Figure 8 shows the fire spread dynamics and fire boundary identification process in the fire area. In Figure 8a, a satellite image of the early stage of the fire is shown, and the purple area indicates the main burning range of the fire. Through Figure 8b, combined with geographic information system (GIS) data, the high-risk area of the fire area is marked in red, and the yellow boundary line marks the outer edge of the fire, providing the geographical boundary of the fire spread. This image highlights the high-risk area of the fire and its outer boundary, which is convenient for further analysis of the trend of fire spread. Figure 8c shows the boundary detection results of the fire area, where the yellow boundary line clearly outlines the expansion range of the fire, can track the dynamic changes of the fire in real time, and provides an important basis for subsequent evacuation route planning. Through these visualization results, we can clearly see the high-precision performance of the model in fire monitoring and boundary identification.
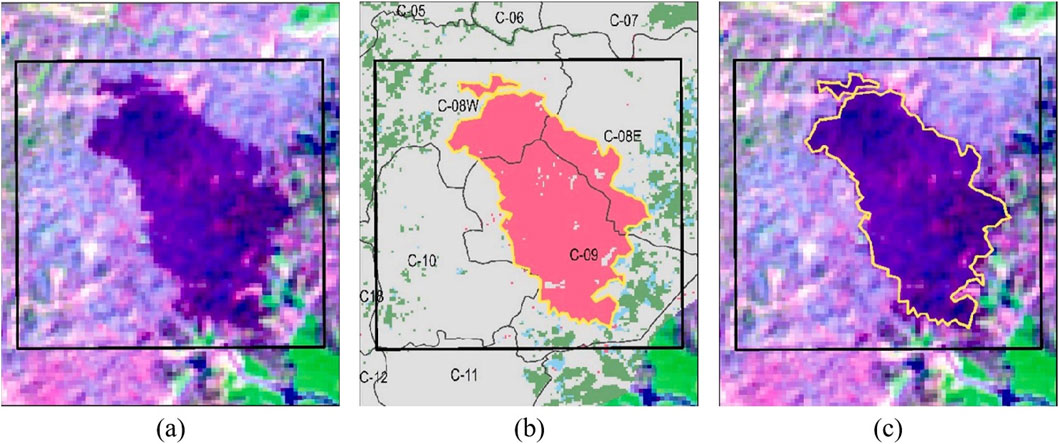
Figure 8. Visualization of fire spread dynamics and fire boundary identification in the fire area (Color Description: purple indicates the main burning area of the fire, red indicates the high-risk area, and yellow indicates the outer edge of the fire. Part (a) shows the initial fire spread, (b) shows the high-risk area, and (c) shows the outer boundary of the fire).
Figure 9 shows the distribution of buildings in the fire scenario and the evacuation route planning recommended by the model. The large image on the left shows the dense distribution of buildings in the fire-affected area, with the black area representing high-risk buildings for fire. Through the red magnifying glass display, the right side of the figure further enlarges the layout details of the buildings in this area to more clearly show the structure of the high-risk fire area. The bottom figure shows the details of the evacuation routes planned by the model in the high-risk area, with paths avoiding dense buildings and fire hotspot areas to ensure safe evacuation. From Figure 9, it can be seen that the model in this paper can carry out efficient path planning under complex building layouts. The model’s path recommendations in high-risk fire areas take into account building density, fire risk levels, and path smoothness, generating evacuation routes that avoid fire hotspots and dense areas, providing relatively safe passages for evacuating personnel. This intelligent path planning has important practical value in fire environments, helping to reduce evacuation time and increase the success rate of risk avoidance. The result verifies the model’s ability to plan effective evacuation routes in complex urban environments.
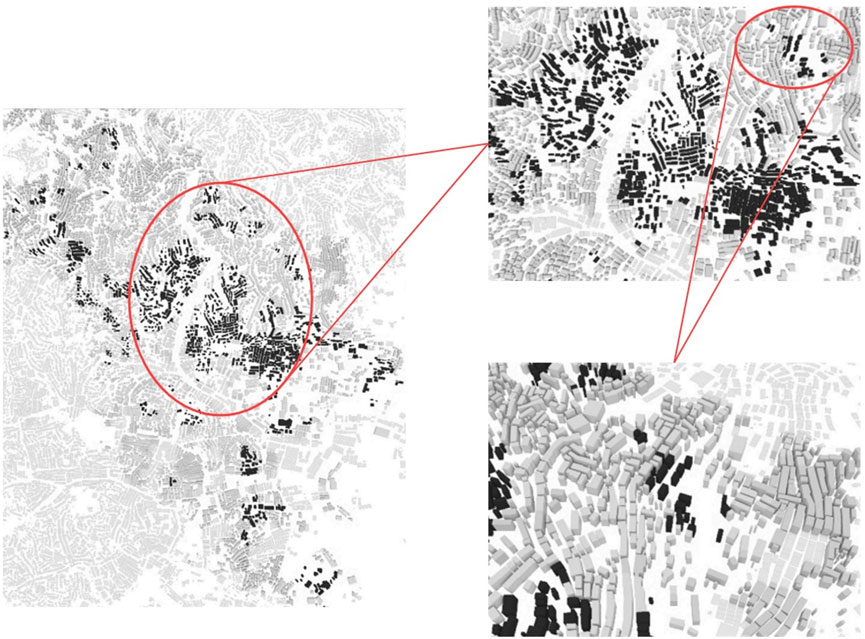
Figure 9. Building distribution in fire scenarios and details of evacuation route planning.
5 Conclusion
This paper proposes a grassland fire evacuation route optimization strategy based on the GreyGNN-MARL model to address the dynamic and complex evacuation needs in grassland fires. The model integrates the real-time monitoring capabilities of Synthetic Aperture Radar (SAR) imagery, the structured extraction of fire scene geographic information by Graph Neural Networks (GNNs), the dynamic adjustment of path weights by the Grey Wolf Optimization (GWO) algorithm, and the intelligent collaboration of Multi-Agent Reinforcement Learning (MARL) in high-risk environments, successfully achieving the intelligent planning and dynamic optimization of grassland fire evacuation routes. Experimental results show that the GreyGNN-MARL model significantly outperforms traditional evacuation route planning methods in terms of evacuation time, risk avoidance success rate, route safety, route smoothness, and communication delay, especially in dynamic fire scenarios, providing effective technical support for emergency management of grassland fires.
Although this study has achieved good experimental results, there are still some limitations. First, the applicability and performance of the model in larger-scale and more complex fire scenarios have not been fully verified. The current experiments are mainly based on simulated environments and limited data sets. Practical applications may face more complex terrain, climate change and sudden fire situations, which may affect the stability and response speed of the model. Secondly, the training and optimization process of the model is relatively complex, and the demand for computing resources is high, which may bring challenges in practical applications with limited resources, especially in the real-time evacuation decision-making process. How to ensure rapid response is still a problem that needs to be further solved. In addition, when dealing with various types of fires, cross-regional evacuations, etc., the model may require additional adaptation and optimization to ensure its wide application in various fire emergency scenarios.
In future research, we will further optimize the GreyGNN-MARL model to improve its applicability and computational efficiency in complex fire scenarios, and ensure that evacuation route planning can respond more quickly to dynamic changes at the fire scene. In order to enhance the practicality of the model, we plan to apply it to real fire data for verification, especially through cooperation with emergency management departments, using real-time data from actual grassland fires and other types of fires to verify the effectiveness of the model. In addition, we will introduce more actual fire data for verification to further explore the application potential of the model in emergency safety management, especially in fire spread prediction and risk avoidance decision-making. At the same time, we also plan to combine more advanced optimization algorithms and intelligent technologies to strive to further improve the performance and security of the model, provide more solid technical support for grassland fire emergency response, and contribute to future grassland ecological protection and security.
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
ZZ: Data curation, Investigation, Project administration, Visualization, Writing–review and editing. LT: Data curation, Formal Analysis, Investigation, Resources, Writing–original draft. RT: Methodology, Resources, Software, Validation, Writing–review and editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Agarwal, V., Tapaswi, S., Chanak, P., and Kumar, N. (2023). Intelligent emergency evacuation system for industrial environments using iot-enabled wsns. IEEE Trans. Instrum. Meas. 72, 1–12. doi:10.1109/tim.2023.3328071
Alsamhi, S. H., Almalki, F. A., Al-Dois, H., Shvetsov, A. V., Ansari, M. S., Hawbani, A., et al. (2021). Multi-drone edge intelligence and sar smart wearable devices for emergency communication. Wirel. Commun. Mob. Comput. 2021, 6710074. doi:10.1155/2021/6710074
Ban, Y., Zhang, P., Nascetti, A., Bevington, A. R., and Wulder, M. A. (2020). Near real-time wildfire progression monitoring with sentinel-1 sar time series and deep learning. Sci. Rep. 10, 1322. doi:10.1038/s41598-019-56967-x
Bhat, R., Rao, P. K., Kamath, C. R., Tandon, V., and Vizzapu, P. (2024). Comparative analysis of bellman-ford and dijkstra’s algorithms for optimal evacuation route planning in multi-floor buildings. Cogent Eng. 11, 2319394. doi:10.1080/23311916.2024.2319394
Bouguettaya, A., Zarzour, H., Taberkit, A. M., and Kechida, A. (2022). A review on early wildfire detection from unmanned aerial vehicles using deep learning-based computer vision algorithms. Signal Process. 190, 108309. doi:10.1016/j.sigpro.2021.108309
Chae, Y. H., Lee, C., Han, S. M., and Seong, P. H. (2022). Graph neural network based multiple accident diagnosis in nuclear power plants: data optimization to represent the system configuration. Nucl. Eng. Technol. 54, 2859–2870. doi:10.1016/j.net.2022.02.024
Chen, Y., Hu, S., Mao, H., Deng, W., and Gao, X. (2020). Application of the best evacuation model of deep learning in the design of public structures. Image Vis. Comput. 102, 103975. doi:10.1016/j.imavis.2020.103975
Florath, J., and Keller, S. (2022). Supervised machine learning approaches on multispectral remote sensing data for a combined detection of fire and burned area. Remote Sens. 14, 657. doi:10.3390/rs14030657
Ge, X., Yang, Y., Peng, L., Chen, L., Li, W., Zhang, W., et al. (2022). Spatio-temporal knowledge graph based forest fire prediction with multi source heterogeneous data. Remote Sens. 14, 3496. doi:10.3390/rs14143496
Ghali, R., and Akhloufi, M. A. (2023). Deep learning approaches for wildland fires using satellite remote sensing data: detection, mapping, and prediction. Fire 6, 192. doi:10.3390/fire6050192
Gómez, R. U. Á., Pérez Olguín, I. J. C., Pérez Domínguez, L. A., Rodríguez-Picón, L. A., and Méndez-González, L. C. (2023). “Distribution route optimization using floyd-warshall weighted graph analysis algorithm with google maps integration in industry 4.0 context,” in Innovation and competitiveness in industry 4.0 based on intelligent systems (Springer), 287–305.
Gupta, A., Watson, S., and Yin, H. (2021). Deep learning-based aerial image segmentation with open data for disaster impact assessment. Neurocomputing 439, 22–33. doi:10.1016/j.neucom.2020.02.139
Hu, X., Ban, Y., and Nascetti, A. (2021). Uni-temporal multispectral imagery for burned area mapping with deep learning. Remote Sens. 13, 1509. doi:10.3390/rs13081509
Hu, X., Zhang, P., Ban, Y., and Rahnemoonfar, M. (2023a). Gan-based sar and optical image translation for wildfire impact assessment using multi-source remote sensing data. Remote Sens. Environ. 289, 113522. doi:10.1016/j.rse.2023.113522
Hu, Y., Zuo, J., Iannucci, B., and Joe-Wong, C. (2023b). “Intelligent communication planning for constrained environmental iot sensing with reinforcement learning,” in 2023 20th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON) (IEEE), 357–365.
Huang, J., Yu, X., An, D., Ning, X., Liu, J., and Tiwari, P. (2025). Uniformity and deformation: a benchmark for multi-fish real-time tracking in the farming. Expert Syst. Appl. 264, 125653. doi:10.1016/j.eswa.2024.125653
Huot, F., Hu, R. L., Goyal, N., Sankar, T., Ihme, M., and Chen, Y. F. (2022). Next day wildfire spread: a machine learning dataset to predict wildfire spreading from remote-sensing data. IEEE Trans. Geoscience Remote Sens. 60, 1–13. doi:10.1109/tgrs.2022.3192974
Jiang, X., Liang, S., He, X., Ziegler, A. D., Lin, P., Pan, M., et al. (2021). Rapid and large-scale mapping of flood inundation via integrating spaceborne synthetic aperture radar imagery with unsupervised deep learning. ISPRS J. photogrammetry remote Sens. 178, 36–50. doi:10.1016/j.isprsjprs.2021.05.019
Karimzadeh, S., Ghasemi, M., Matsuoka, M., Yagi, K., and Zulfikar, A. C. (2022). A deep learning model for road damage detection after an earthquake based on synthetic aperture radar (sar) and field datasets. IEEE J. Sel. Top. Appl. Earth Observations Remote Sens. 15, 5753–5765. doi:10.1109/jstars.2022.3189875
Kodipalli, A., Fernandes, S. L., Dasar, S. K., and Ismail, T. (2023). Computational framework of inverted fuzzy c-means and quantum convolutional neural network towards accurate detection of ovarian tumors. Int. J. E-Health Med. Commun. (IJEHMC) 14, 1–16. doi:10.4018/ijehmc.321149
Lasaponara, R., Fattore, C., and Modica, G. (2023). Imaging burned areas and fire severity in mediterranean fragmented ecosystems using sentinel-1 and sentinel-2: the case study of tortoli–ogliastra fire (sardinia). IEEE Geoscience Remote Sens. Lett. 20, 1–5. doi:10.1109/lgrs.2023.3324945
Lee, I. K., Trinder, J. C., and Sowmya, A. (2020). Application of u-net convolutional neural network to bushfire monitoring in Australia with sentinel-1/-2 data. Int. Archives Photogrammetry, Remote Sens. Spatial Inf. Sci. 43, 573–578. doi:10.5194/isprs-archives-xliii-b1-2020-573-2020
Mirahadi, F., and McCabe, B. Y. (2021). Evacusafe: a real-time model for building evacuation based on dijkstra’s algorithm. J. Build. Eng. 34, 101687. doi:10.1016/j.jobe.2020.101687
Nur, A. S., Kim, Y. J., and Lee, C. W. (2022). Creation of wildfire susceptibility maps in plumas national forest using insar coherence, deep learning, and metaheuristic optimization approaches. Remote Sens. 14, 4416. doi:10.3390/rs14174416
Oliva, P., Medina, N., Durán, L., and Vidal, P. (2020). “Improved biomass and burning efficiency factors for forest fire emissions estimation in central Chile,” in 2020 IEEE Latin American GRSS and ISPRS Remote Sensing Conference (LAGIRS), Santiago, Chile, 22–26 March, 2020 (IEEE), 477–482.
Pi, Y., Nath, N. D., and Behzadan, A. H. (2020). Convolutional neural networks for object detection in aerial imagery for disaster response and recovery. Adv. Eng. Inf. 43, 101009. doi:10.1016/j.aei.2019.101009
Poudel, S., and Moh, S. (2021). Hybrid path planning for efficient data collection in uav-aided wsns for emergency applications. Sensors 21, 2839. doi:10.3390/s21082839
Salami, O. B., Xu, G., Kumar, A. R., and Pushparaj, R. I. (2023). Underground mining fire hazards and the optimization of emergency evacuation strategies (ees): the issues, existing methodology and limitations, and way forward. Process Saf. Environ. Prot. 177, 617–634. doi:10.1016/j.psep.2023.07.012
Sannidhan, M., Martis, J. E., Nayak, R. S., Aithal, S. K., and Sudeepa, K. (2023). Detection of antibiotic constituent in aspergillus flavus using quantum convolutional neural network. Int. J. E-Health Med. Commun. (IJEHMC) 14, 1–26. doi:10.4018/ijehmc.321150
Sharma, J., Andersen, P. A., Granmo, O. C., and Goodwin, M. (2020). Deep q-learning with q-matrix transfer learning for novel fire evacuation environment. IEEE Trans. Syst. Man, Cybern. Syst. 51, 7363–7381. doi:10.1109/tsmc.2020.2967936
Subramanian, S., Rajesh, S., Britto, P. I., and Sankaran, S. (2023). Mdho: mayfly deer hunting optimization algorithm for optimal obstacle avoidance based path planning using mobile robots. Cybern. Syst., 1–20. doi:10.1080/01969722.2023.2177804
Sun, Y., Hua, Y., Mou, L., and Zhu, X. X. (2021). Cg-net: conditional gis-aware network for individual building segmentation in vhr sar images. IEEE Trans. Geoscience Remote Sens. 60, 1–15. doi:10.1109/tgrs.2020.3043089
Sun, Y., Lv, B., Yang, H., and Li, X. (2024). “Multi-uav trajectory planning based on improved multi-population grey wolf optimizer algorithm,” in 2024 36th Chinese control and decision conference (CCDC) (IEEE), 6142–6148.
Tian, Y., Wu, Z., Li, M., Wang, B., and Zhang, X. (2022). Forest fire spread monitoring and vegetation dynamics detection based on multi-source remote sensing images. Remote Sens. 14, 4431. doi:10.3390/rs14184431
Tlijani, H., Jouila, A., and Nouri, K. (2023). Optimized sliding mode control based on cuckoo search algorithm: application for 2df robot manipulator. Cybern. Syst., 1–17. doi:10.1080/01969722.2023.2247259
Ünal, A. E., Gezer, C., Pak, B. K., and Güngör, V. Ç. (2022). “Generating emergency evacuation route directions based on crowd simulations with reinforcement learning,” in 2022 Innovations in Intelligent Systems and Applications Conference (ASYU), Antalya, Turkey, 07–09 September, 2022 (IEEE), 1–6.
Wang, J., Li, F., and He, L. (2025b). A unified framework for adversarial patch attacks against visual 3d object detection in autonomous driving. IEEE Trans. Circuits Syst. Video Technol., 1. doi:10.1109/tcsvt.2025.3525725
Wang, J., Li, F., Lv, S., He, L., and Shen, C. (2025a). Physically realizable adversarial creating attack against vision-based bev space 3d object detection. IEEE Trans. Image Process. 34, 538–551. doi:10.1109/tip.2025.3526056
Wang, J., and Wang, R. (2024). New productive forces: indicator construction and spatio-temporal evolution. J. Xi’an Univ. Finance Econ. 37, 31–47.
Wang, X., Fu, L., Cheng, N., Sun, R., Luan, T., Quan, W., et al. (2022). Joint flying relay location and routing optimization for 6g uav–iot networks: a graph neural network-based approach. Remote Sens. 14, 4377. doi:10.3390/rs14174377
Wei, X., Zhang, Y., Song, H., Qin, H., and Zhao, G. (2024). Research on evacuation path planning based on improved sparrow search algorithm. CMES-Computer Model. Eng. and Sci. 139, 1295–1316. doi:10.32604/cmes.2023.045096
Xu, L., Huang, K., Liu, J., Li, D., and Chen, Y. F. (2022). Intelligent planning of fire evacuation routes using an improved ant colony optimization algorithm. J. Build. Eng. 61, 105208. doi:10.1016/j.jobe.2022.105208
Yang, X., Zhang, R., Li, Y., and Pan, F. (2022). Passenger evacuation path planning in subway station under multiple fires based on multiobjective robust optimization. IEEE Trans. Intelligent Transp. Syst. 23, 21915–21931. doi:10.1109/tits.2022.3190291
Young, E., and Aguirre, B. (2021). Prioritevac: an agent-based model (abm) for examining social factors of building fire evacuation. Inf. Syst. Front. 23, 1083–1096. doi:10.1007/s10796-020-10074-9
Yu, Y., and Zhenhua, L. (2024). New development concept to accelerate the formation of new productive forces: theoretical logic and implementation path. J. Xi’an Univ. Finance Econ. 37, 3–14.
Zhang, D., Li, W., Gong, J., Huang, L., Zhang, G., Shen, S., et al. (2022). Hdrlm3d: a deep reinforcement learning-based model with human-like perceptron and policy for crowd evacuation in 3d environments. ISPRS Int. J. Geo-Information 11, 255. doi:10.3390/ijgi11040255
Zhang, L., Liu, J., Wei, Y., An, D., and Ning, X. (2025). Self-supervised learning-based multi-source spectral fusion for fruit quality evaluation: a case study in mango fruit ripeness prediction. Inf. Fusion 117, 102814. doi:10.1016/j.inffus.2024.102814
Zhang, P., Ban, Y., and Nascetti, A. (2021). Learning u-net without forgetting for near real-time wildfire monitoring by the fusion of sar and optical time series. Remote Sens. Environ. 261, 112467. doi:10.1016/j.rse.2021.112467
Keywords: fire evacuation route, SAR imagery, pathfinding optimization, deep learning, multi-hazard ecosystem resilience, post-fire recovery, climate-adaptive decision-making
Citation: Zhang Z, Tan L and Tiong RLK (2025) Evacuation path optimization algorithm for grassland fires based on SAR imagery and intelligent optimization. Front. Environ. Sci. 13:1522933. doi: 10.3389/fenvs.2025.1522933
Received: 13 November 2024; Accepted: 24 February 2025;
Published: 18 March 2025.
Edited by:
Felipe Augusto Pereira De Figueiredo, National Institute of Telecommunications, BrazilReviewed by:
Maryam Rahnemoonfar, Lehigh University, United StatesYaohui Liu, Shandong Jianzhu University, China
Georgios Marios Karagiannis, International Coalition for Sustainable Infrastructure, United Kingdom
Copyright © 2025 Zhang, Tan and Tiong. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Lingye Tan , bGluZ3llMDAxQGUubnR1LmVkdS5zZw==